
Abstract
Dynamic force is the key indicator for monitoring the condition of a mechanical product. These mechanical structures always encompass some nonlinear factors. Most previous studies focused on obtaining the dynamic force of linear structures. Consequently, this study focuses on the nonlinear mechanical structure, and a novel identification strategy is proposed to indirectly identify the excitation force. For the identification strategy, based on a nonlinear state-space model, a force identification equation for the nonlinear structure is built, wherein the transfer matrix consists of coefficient matrices of the nonlinear state-space model, and these coefficient matrices are calculated by a nonlinear subspace identification algorithm. Then, under the generalized cross-validation criterion, the truncated total least squares method is introduced to solve the ill-posed equation to eventually obtain the excitation force of the nonlinear structure. The identification results from two numerical simulation cases and one experimental case illustrate that the proposed identification strategy can stably and accurately identify the excitation force of nonlinear structures.
Introduction
To implement reliability analysis, vibration control, optimal design, and structural health monitoring, it is necessary to obtain accurate dynamic forces acting on the mechanical structure.1,2 Unfortunately, because of the limitation of installing space and sensing technology, it is always impossible to directly measure dynamic force by the force sensor in most engineering practices. However, compared with measuring dynamic force, the structural dynamic response can be easily measured by a suitable sensor. Therefore, many scholars have devoted time to developing some indirect techniques to indirectly obtain the unknown dynamic force on the basis of the dynamic response and structural characteristics. 3
Indirect force identification is essentially the second kind of dynamic inverse problem, and the key step is to establish a force identification equation and perform the inverse operation of its transfer matrix. Unfortunately, the transfer matrix for the mechanical structure is ill-conditioned. This makes the corresponding force identification problem an ill-posed inverse problem. Consequently, a direct matrix inversion operation cannot be used to solve such ill-posed problems.
In the past several decades, various regularization methods have been developed to solve this problem.4,5 Qiao and Rahmatalla 6 used the generalized cross-validation (GCV) criterion combined with Tikhonov regularization approach to estimate the moving force on an Euler–Bernoulli beam, and they also studied the influence of different regularization matrices on identification results. By identifying the excitation force on a plate, Choi et al. 7 studied the influence of regularization parameter selection criterions on the performance of Tikhonov regularization method. This demonstrates that compared with GCV criterion and ordinary cross-validation criterion, the L-curve criterion is more appropriate for obtaining the Tikhonov regularization parameter at a high noise level. Under determining the truncation threshold using the L-curve criterion, Leclere et al. 8 developed truncated singular value decomposition (TSVD) method to indirectly identify bearing loads inside an operating engine. Gunawan 9 introduced the trust region strategy to enforce the regularization and extended the Levenberg–Marquardt iterative algorithm to solve an unknown impact force. Wang et al. 10 proposed a novel hybrid conjugate gradient algorithm to iteratively solve multisource force identification problems, and the identification results showed that the stability, robustness, and computational efficiency of the proposed iterative algorithm were superior to those of the traditional Landweber iteration regularization method. Since the profile of the impact force is similar to that of a cubic B-spline, Liu et al. 11 presented a modified regularized cubic B-spline collocation method to identify the impact force. Because of the sparsity of the impact signal, Liu et al. 12 introduced a fast iterative shrinkage-thresholding algorithm to solve a sparse regularization model developed from the dynamic response and impact force reconstruction equation, so as to synthetically estimate the above two physical quantities. Qiao et al. 13 proposed the group sparse regularization approach, which is based on the mixed l2,1-norm regularization model and an accelerated gradient descent algorithm to identify unknown impact forces. He et al. 14 combined a non-probabilistic analysis model and TSVD method to identify the load in an acoustic structure interaction system involving non-probabilistic uncertainty. Additionally, He et al. 15 proposed a novel modified regularization method to identify the random dynamic load. This method is not sensitive to the selection of measuring positions.
In conclusion, various regularization methods have been widely used in engineering practice to successfully solve the problem of indirectly obtaining dynamic loads. However, most of these studies focused on linear structures. In recent years, with the development of nonlinear dynamics including nonlinear numerical algorithms,16-19 fractal vibration theory,20-22 and nonlinear system identification,23-25 nonlinear factors and phenomena in mechanical structures have attracted increasing attention. This means that mechanical structures are always nonlinear because of nonlinearities in material properties and structural components,26-28 and considering these nonlinear factors can obtain more reasonable and accurate force identification results. These nonlinear factors change the structural characteristics, making it impossible to form the force identification equation as in the previous approach. Furthermore, the nonlinear force caused by the nonlinear factor also reduces the identification accuracy of the excitation force. To identify the non-harmonic periodic excitation force of the nonlinear damped system, Jang et al. 29 introduced Landweber–Fridman regularization and Tikhonov regularization methods to solve an ill-posed Volterra-type nonlinear integral equation in order to obtain a stable identification result. However, this approach requires both the velocity and displacement responses and is only suitable for a single-degree-of-freedom (DOF) system. Ma et al. 30 developed Tikhonov regularization combined with GCV criterion to solve the force identification equation of nonlinear multi-degrees-of-freedom system in the frequency domain. For the frequency-domain method, the identification accuracy near the resonance frequency is low. Additionally, this study only considered errors in the measured dynamic response. However, for nonlinear structures, it is difficult to obtain an absolutely accurate transfer matrix. This means that there are errors in both transfer matrix and response vector.
The indirect force identification problem for a nonlinear structure is studied in this study, and a novel time-domain identification strategy is proposed. The core of the novel strategy is to establish a time-domain force identification equation of nonlinear structure through a nonlinear state-space model, wherein the transfer matrix consists of its coefficient matrices. Therefore, before identifying the excitation force, these coefficient matrices are estimated by nonlinear subspace identification (NSI) algorithm.31,32 Then, considering that there are errors in both the transfer matrix and dynamic response, the ill-posed force identification equation is solved by the truncated total least square (TTLS) method33,34 in conjunction with GCV criterion, eventually obtaining the unknown excitation force of the nonlinear structure.
Force Identification Equation Based on Nonlinear State-Space Model
Force identification is the second type of inverse problem in vibration research, and the purpose is to estimate the external load based on structural transfer characteristics and output responses. Therefore, to conduct force identification, the first problem is to determine the relationship between the dynamic response and the excitation force according to structural characteristics, that is, to form a force identification equation. For the linear structure, the convolution of excitation force

However, for a structure with the local nonlinearity studied in this article, the structural output response is not only generated by the excitation force but is also affected by the nonlinear force produced by nonlinear factors.
35
Additionally, the actual frequency response function (FRF) is nonlinear FRF. As a result, for the local nonlinear substructure,
A local nonlinear substructure means that the number of nonlinear elements to be analyzed is far lower than the number of degrees of freedom of the entire structure. It also means that different from the structural nonlinearity caused by material or large deformation, local nonlinearity (which can be described by the lumped spring-damping element) only acts on the local position of the structure. Therefore, based on the output feedback principle,
36
the nonlinear force generated by the local nonlinear factor and excitation force are regarded as the external force acting on the underlying linear part of the nonlinear structure. Then, for a structure with the local nonlinearity, the differential equation of motion can be rewritten as equations (2) and (3), which form the nonlinear state-space model31,32 under defining state variable


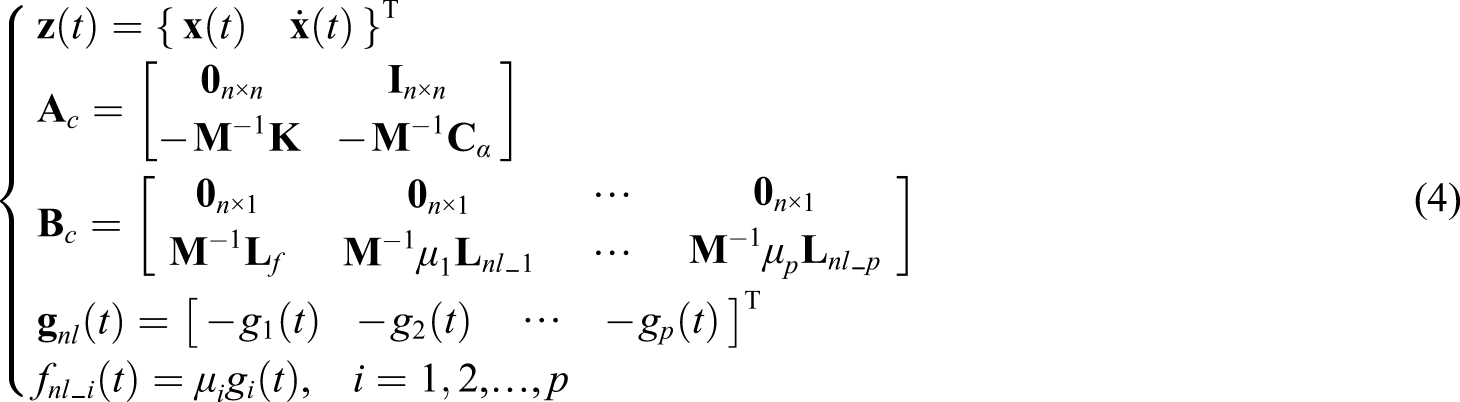
Since vibration signals measured in engineering practice are discrete data corresponding to sampling time points, the discrete-time model shown in equations (5) and (6) needs to be developed from the corresponding continuous-time model shown in equations (2) and (3)
37



For the mechanical system, an output response is generated only when there is an input signal. Therefore, zero initial condition

The corresponding compact matrix-vector form of equation (8) is given by

As shown in equation (9), output vector
The dynamic response can be measured to form the response vector
Nonlinear subspace identification algorithm evolved from the classic linear subspace identification (LSI) algorithm
38
and is a time-domain nonlinear system identification method. Based on equations (5) and (6), once output and input vectors have been obtained, NSI algorithm mainly containing row space transformation technology and matrix projection technology is used to calculate those coefficient matrices (

Regularization Method for Inverse Problem
Once transfer matrix
The measured dynamic response is inevitably polluted by interference information. Additionally, the estimated coefficient matrices are not absolutely accurate because they are identified on the basis of contaminated dynamic response, and NSI algorithm also produces the systematic errors. This indicates errors in both the transfer matrix
Similar to TSVD method, TTLS method aims at neglecting small singular values.

Then, based on determining an appropriate truncation order (or threshold)

Finally, based on equation (12), TTLS solution of the force identification equation of the nonlinear structure is

It is noted from the above discussions that truncation order
In summary, the proposed excitation force identification strategy of the nonlinear structure contains two stages: an off-line preprocessing stage and a force identifying stage. The known excitation force generated by the vibration exciter is imposed on the nonlinear structure in the off-line preprocessing stage. Then, under the measured dynamic response and extended force (nonlinear describing function can be calculated by the dynamic response), the transfer matrix
Numerical and Experimental Studies
Two numerical simulation cases and one experimental case are utilized to verify the performance of the force identification strategy of the nonlinear structure in this section. Case 1 focuses on showing the feasibility of the proposed strategy and discussing the influence of nonlinear factors on the force identification result. Case 2 demonstrates the performance of the proposed strategy on multiple nonlinearities. For Case 3, the effectiveness of proposed strategy under actual experimental conditions is validated on a cantilever test bed with clearance nonlinearity.
In subsequent case studies, the force identification error

Furthermore, considering that the measured actual response is inevitably polluted by the interference information, the simulated noise signal

Case 1: Five-DOF Structure with Cubic Stiffness Nonlinearity
As shown in Figure 1, a five-DOF simulation model with cubic stiffness nonlinearity is utilized to validate the feasibility of the force identification strategy of nonlinear structures. Excitation force acts at the third DOF. Five-degree-of-freedom simulation model with cubic stiffness nonlinearity.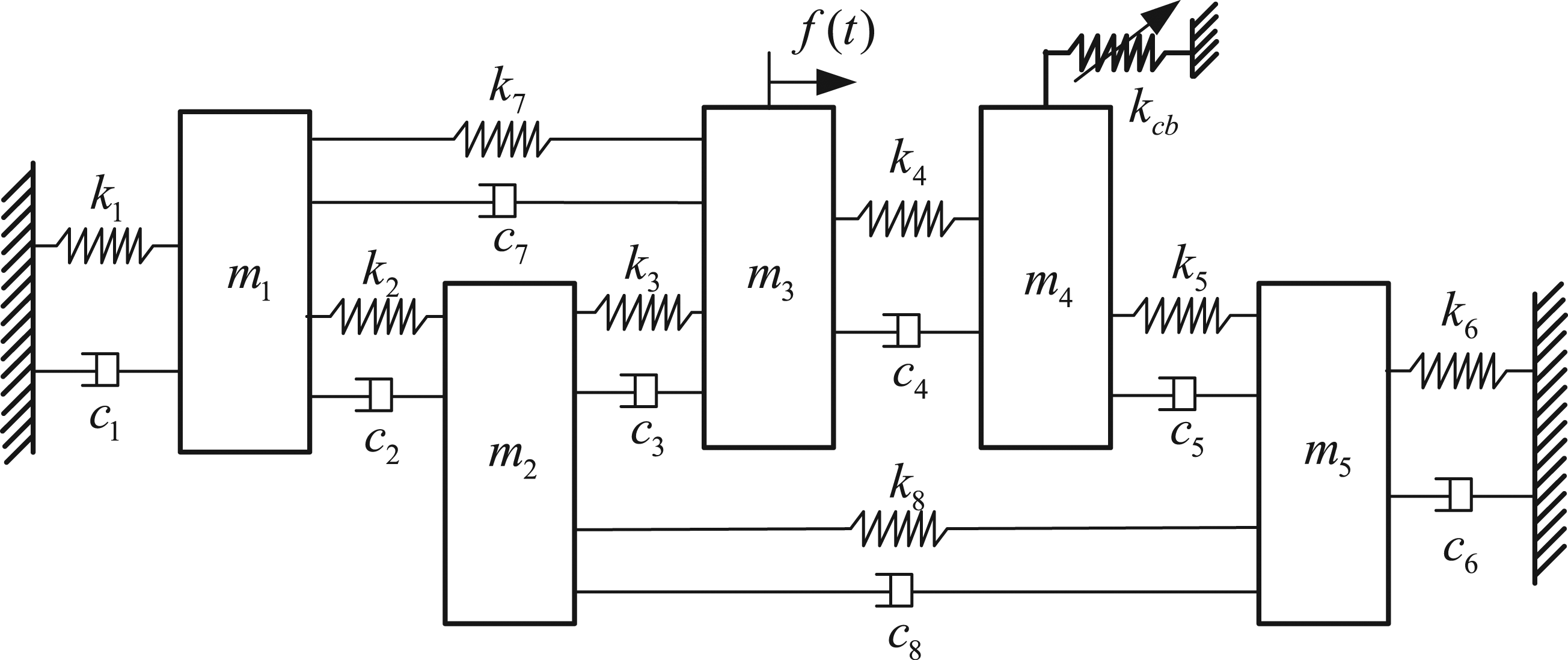
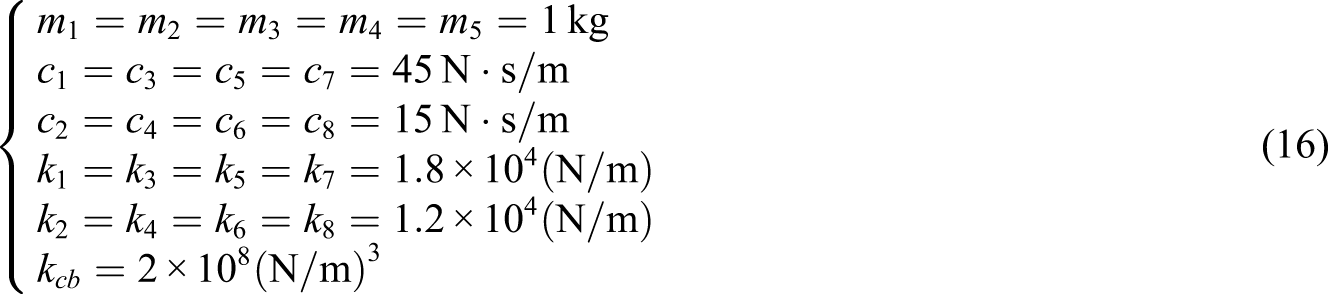
The cubic stiffness nonlinearity shown in Figure 1 is located between the fourth DOF and ground, and the corresponding nonlinear force is expressed as

The simulation case contains an excitation force and a nonlinear factor. Therefore, it is necessary to set two response measurement points (two reference locations). To conveniently calculate the nonlinear describing function of cubic stiffness nonlinearity by equation (17), the displacement responses at the second DOF and fourth DOF are used to conduct the force identification. Furthermore, according to the proposed force identification strategy of nonlinear structures, the known Gauss white noise signal is applied to conduct vibration testing in the off-line preprocessing stage. Gaussian white noise is produced by the “band-limited white noise” module in SIMULINK module of MATLAB. The “sample time” is set to 1/1024 s, and “noise power” is set to 0.1. Then, coefficient matrices of the nonlinear state-space model are calculated by NSI algorithm and are applied to obtain the transfer matrix. Based on equation (10), these coefficient matrices can also be used to estimate the extended FRF and eventually obtain the linear FRF and nonlinear parameter. As shown in Figure 2, the linear FRF between the excitation location (third DOF) and nonlinear location (fourth DOF) calculated by NSI algorithm is close to the corresponding theoretical value. Under vibration data of the underlying linear structure (removing nonlinear factors), the theoretical linear FRF is calculated by the classical H1 estimation method.
41
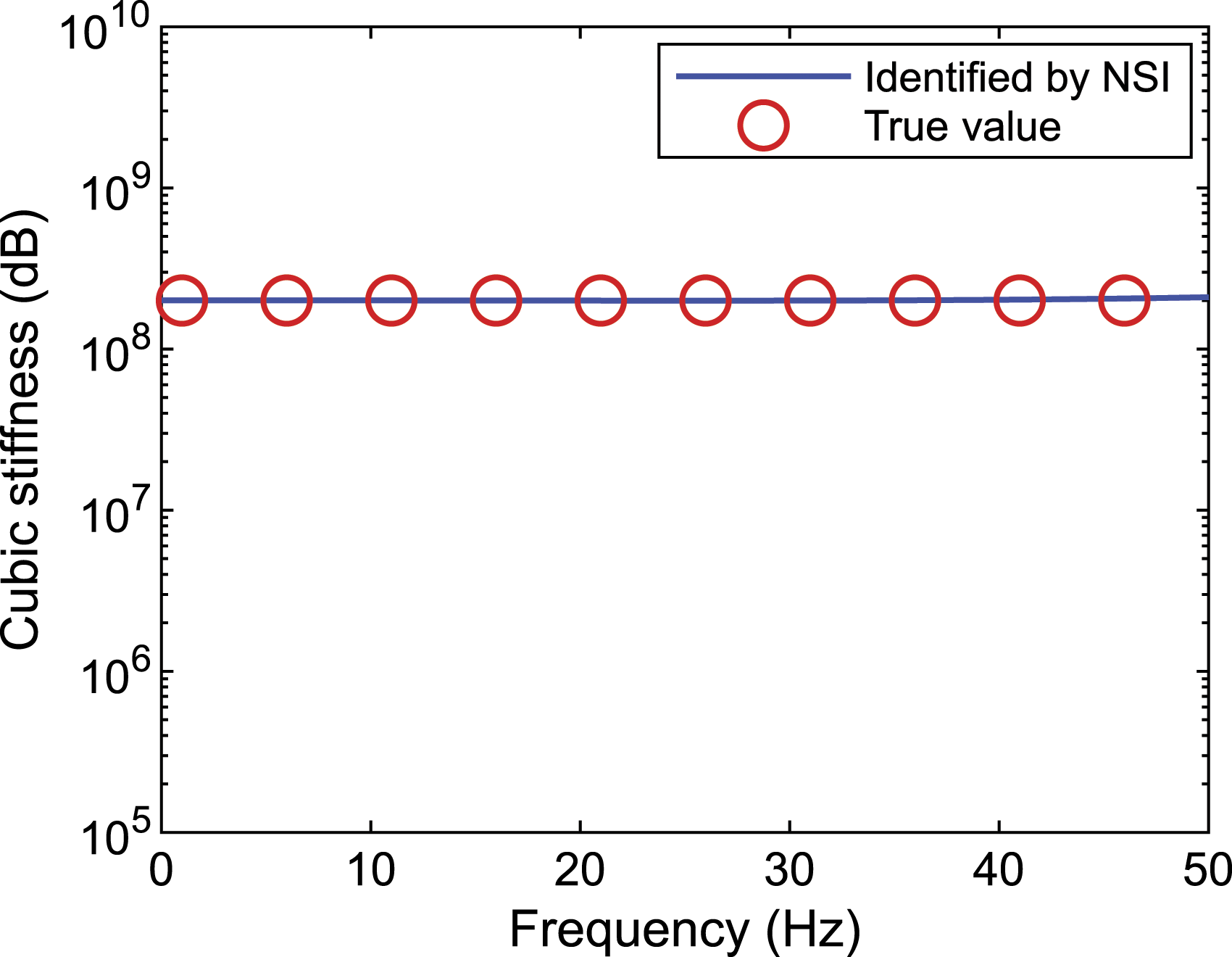
Additionally, as shown in Figure 3, the mean value of the identified cubic stiffness at 0–50 Hz is Linear frequency response function between excitation location and nonlinear location. Identification result of cubic stiffness by nonlinear subspace identification algorithm.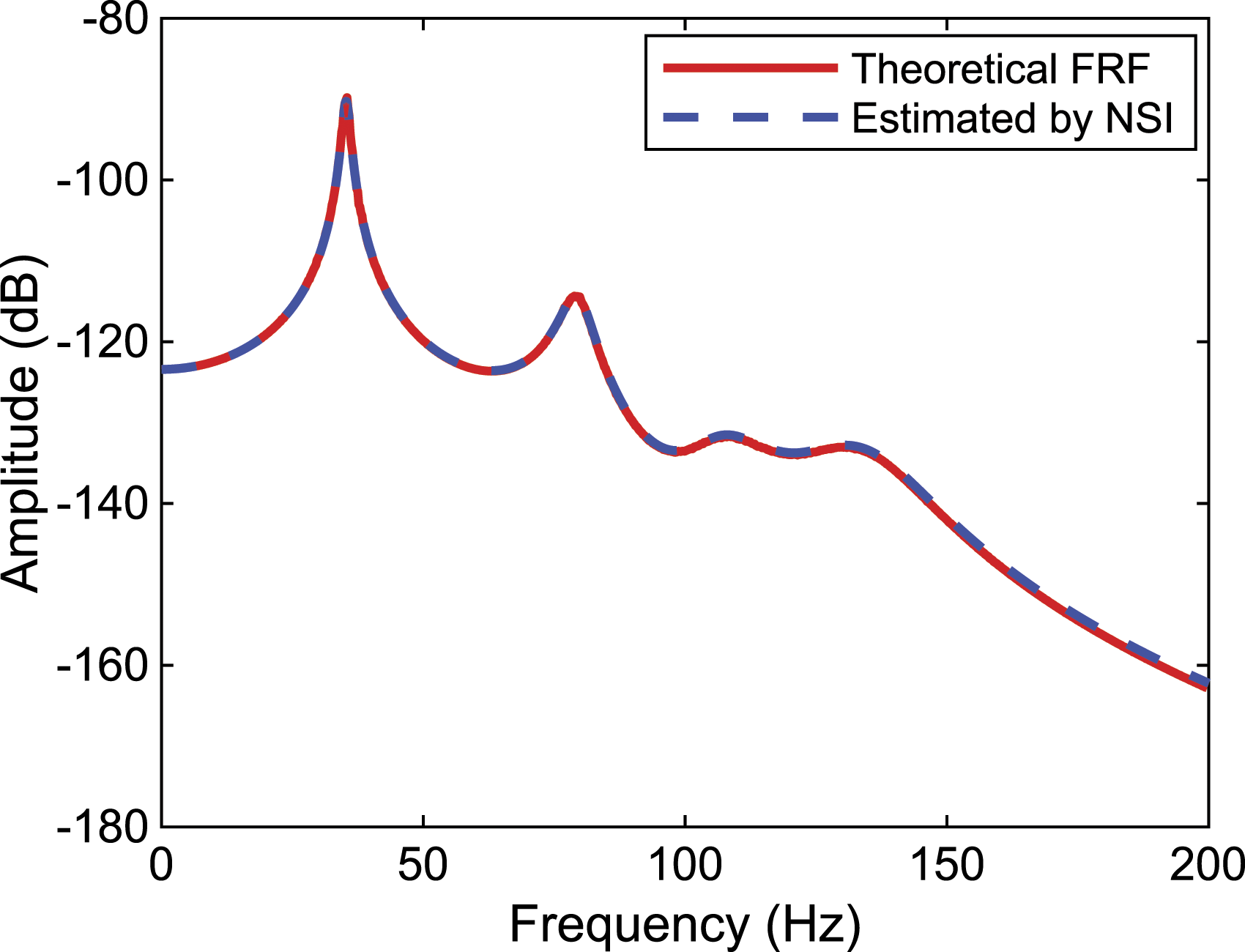
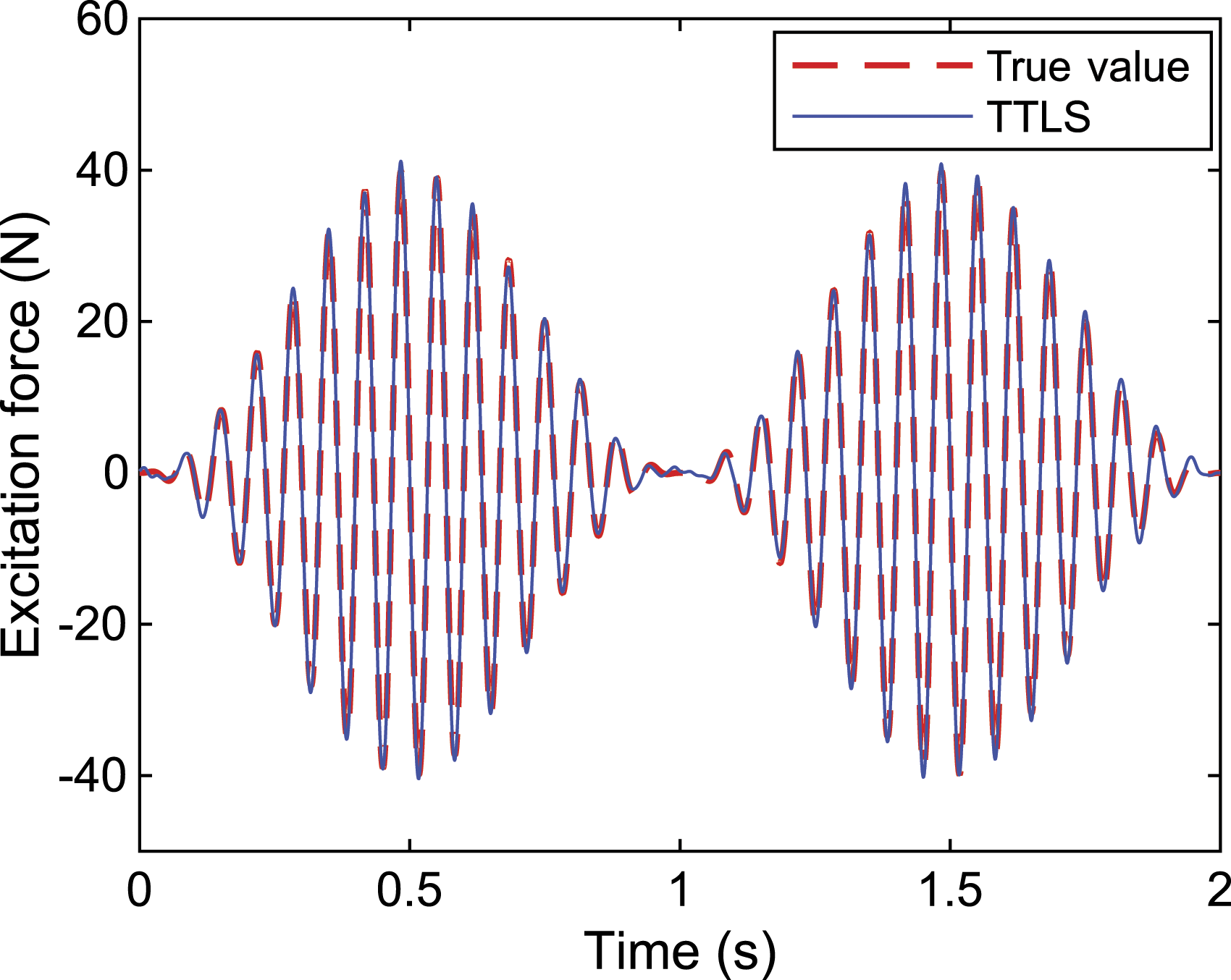
In the force identification stage, the excitation force is set as Generalized cross-validation criterion for choosing truncation order. Identification result of excitation force.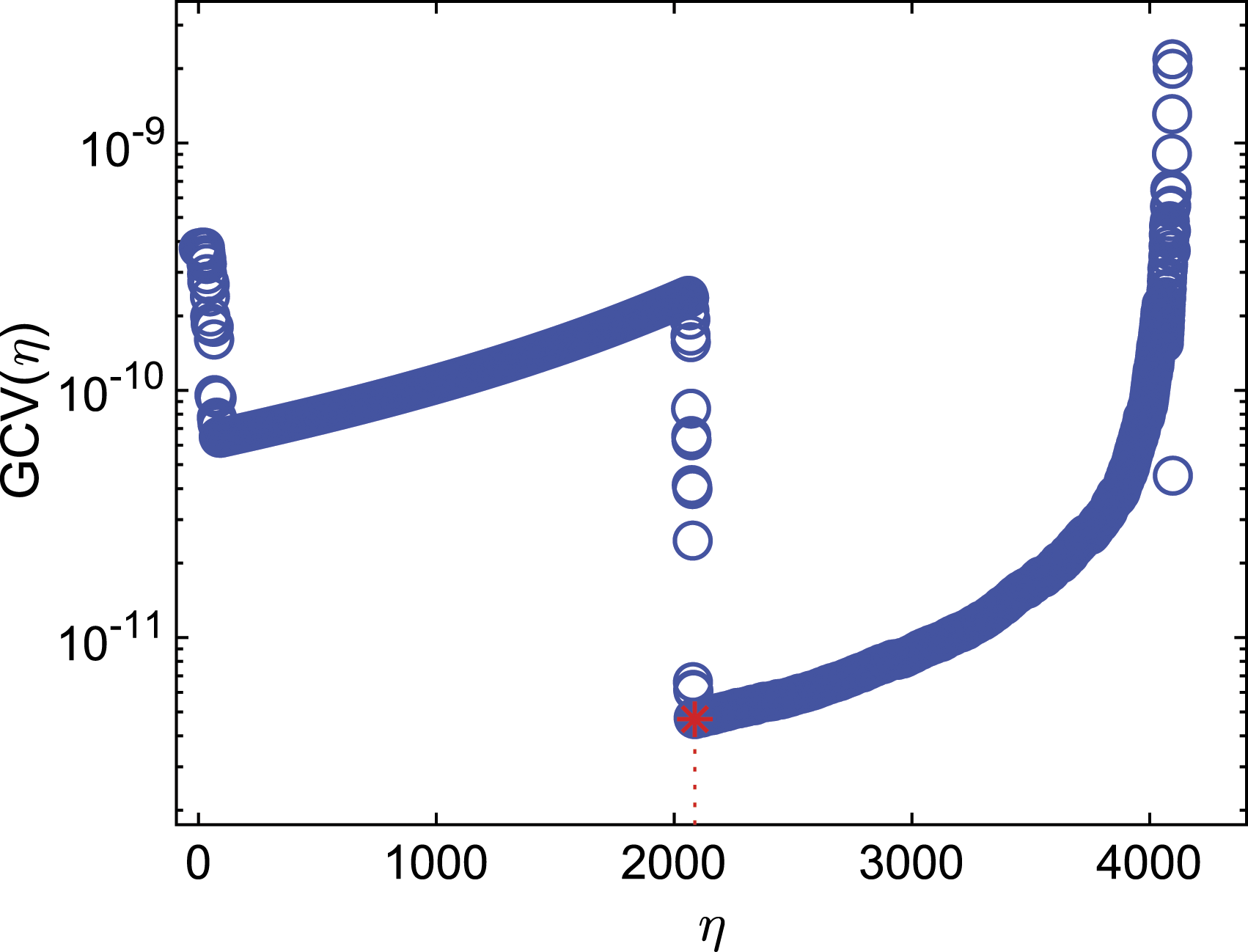
When the above nonlinear simulation model is linearized by ignoring the existing cubic stiffness nonlinearity, the identified excitation force is shown in Figure 6. In the identification process, the force identification equation of a linearized structure is established on the basis of the corresponding linear state-space model. Nonlinear parameters are not included in matrix Identification result of excitation force when ignoring nonlinear factor.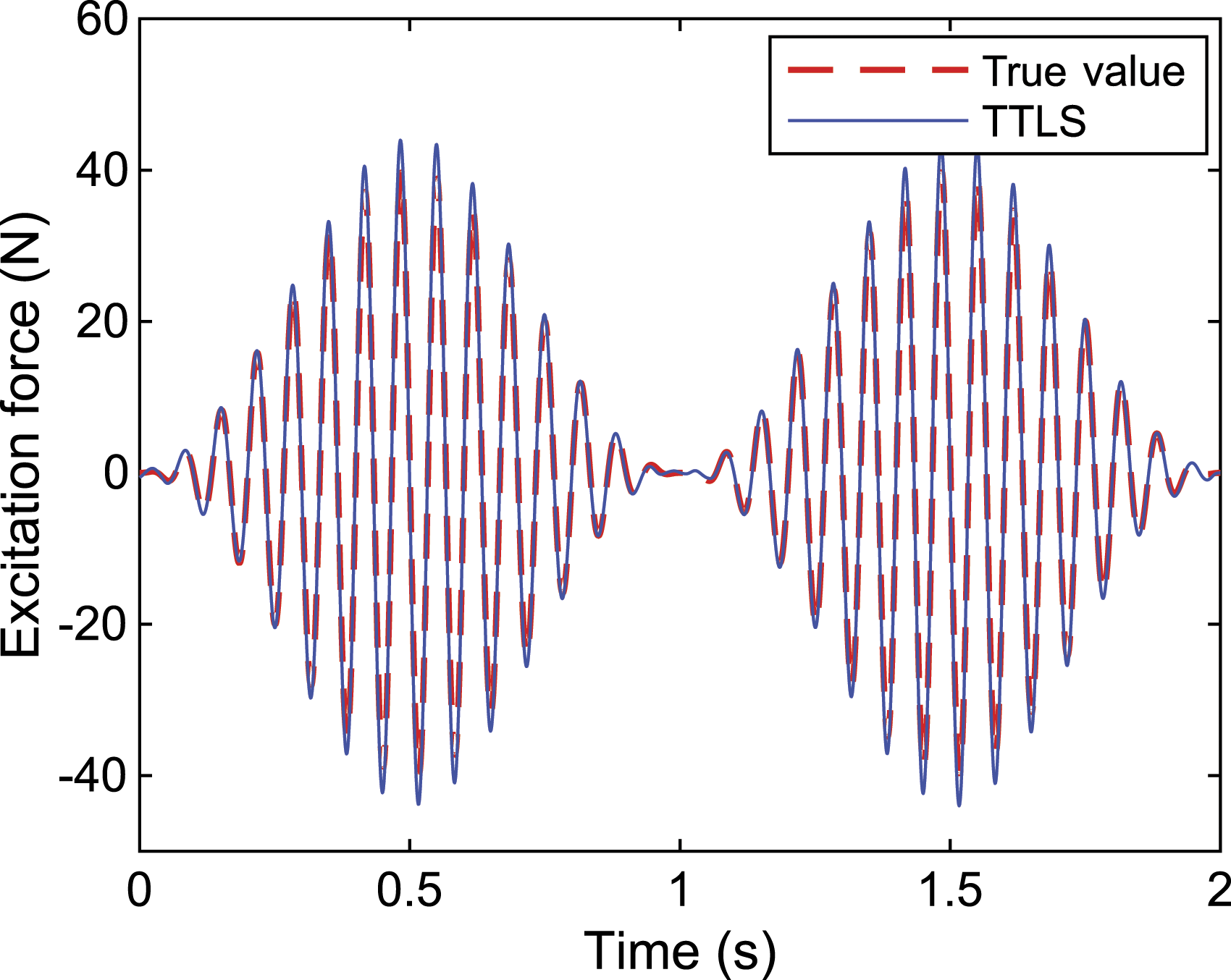
It is worth noting that in addition to the excitation force, a nonlinear describing function can also be abstracted from the calculated extended force vector. However, as shown in Figure 7, the identification result of the nonlinear describing function seriously deviates from its true value. This is because the magnitude order of nonlinear describing function (approximately Identification result of nonlinear describing function. Identification result under nonlinear force considered in extended force vector.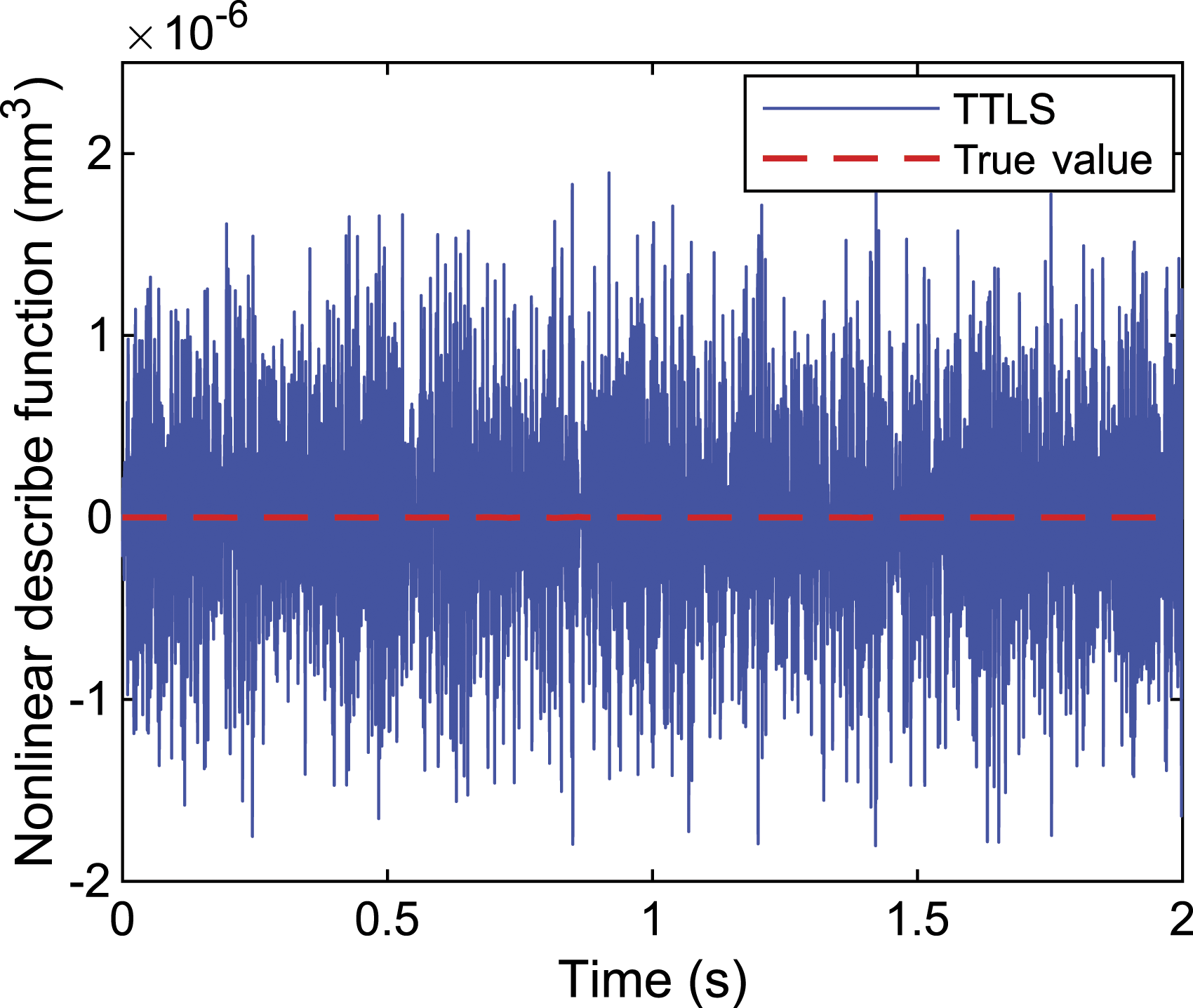
Case 2: Cantilever Model with Two Nonlinearities
In this section, a cantilever model with two square nonlinearities shown in Figure 9 is built to verify the performance of the identification strategy on a continuous structure with multiple nonlinearities. In the figure, two kinds of square nonlinearities are located on the simulated cantilever beam. The corresponding nonlinear forces are given by Simulated cantilever beam with two square nonlinearities.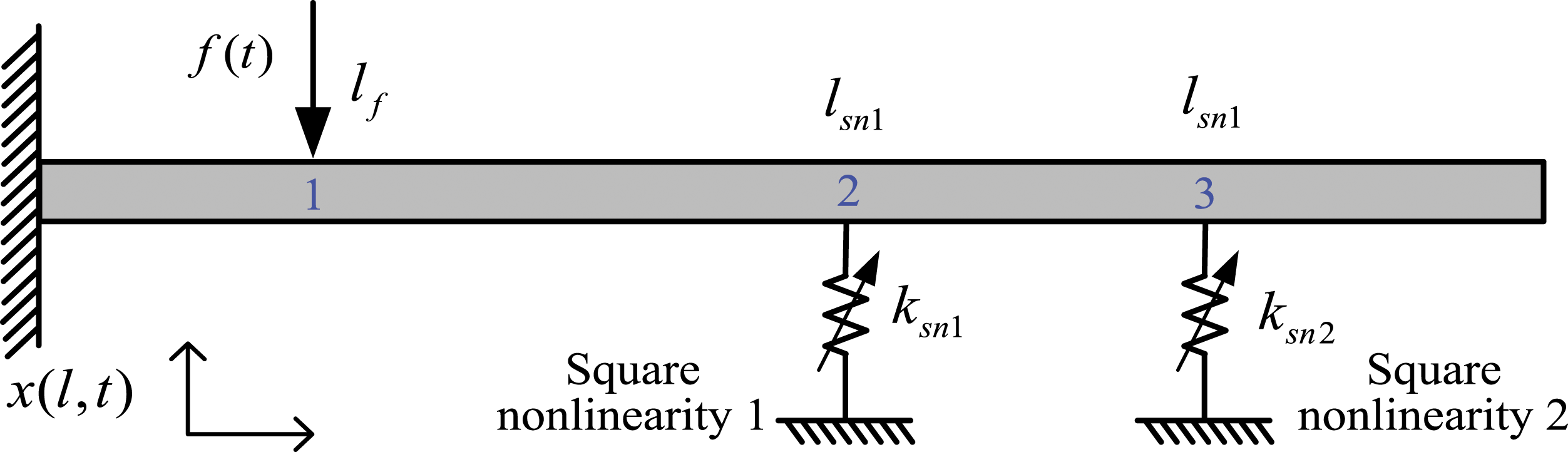


In the simulation calculation, the Young’s modulus, density, cross-sectional area, cross-sectional moment of inertia, and length of the cantilever model are
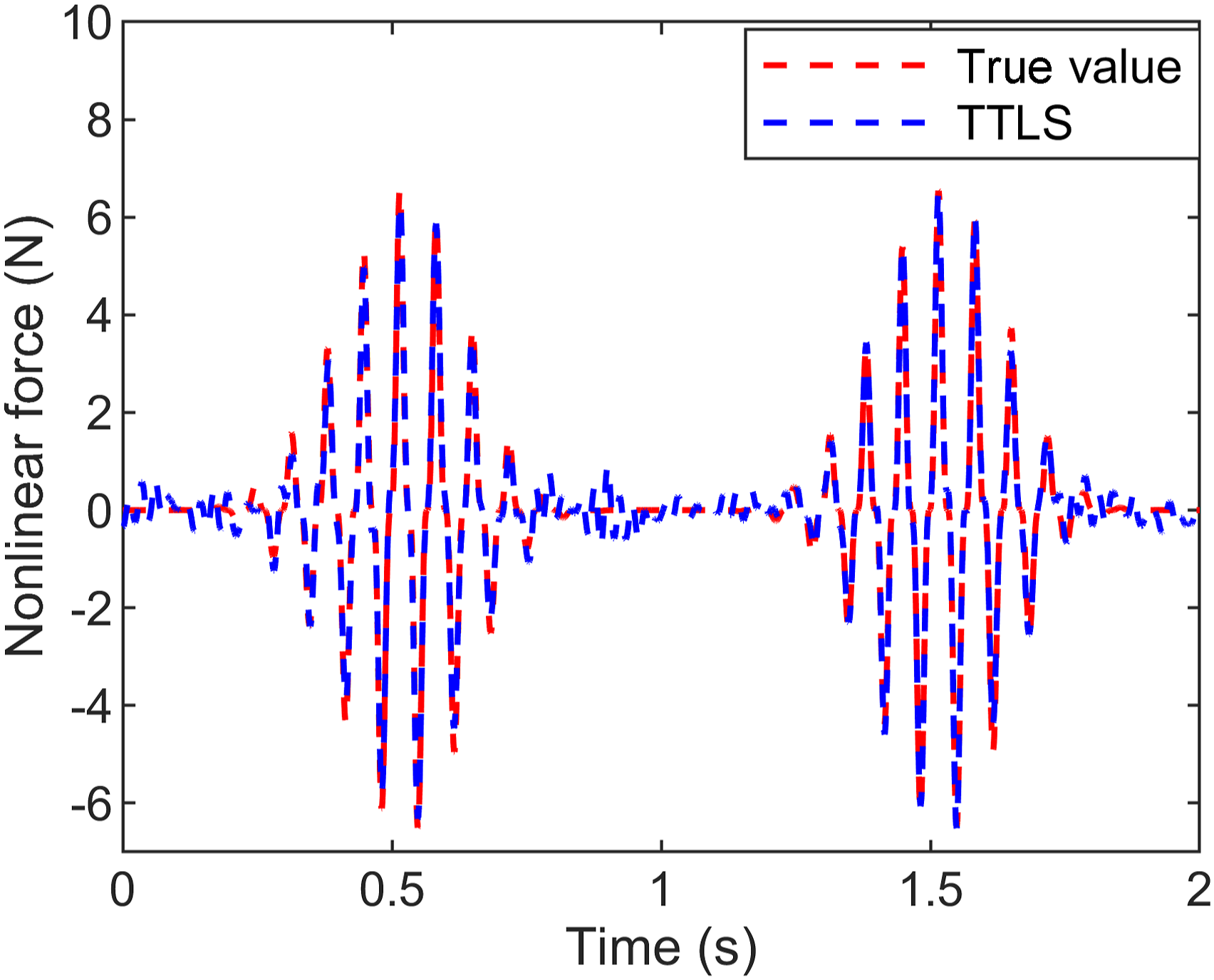
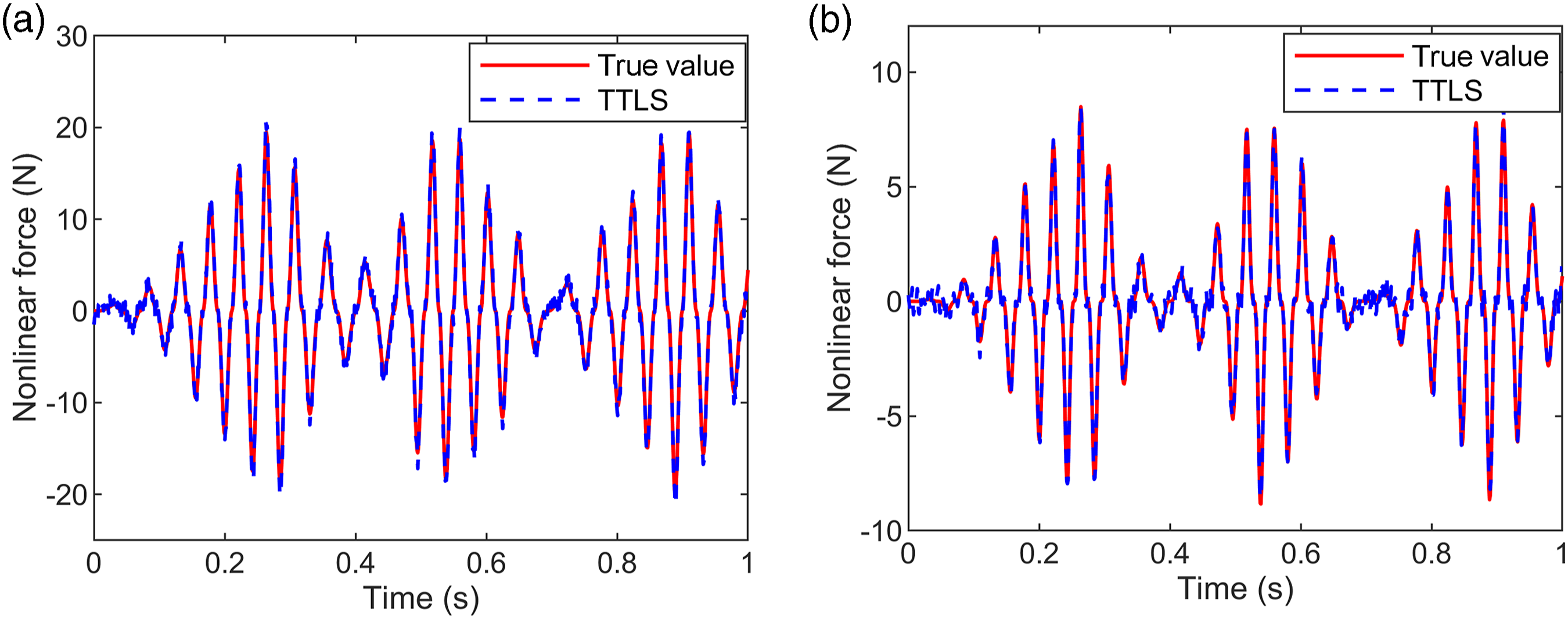
To conduct force identification of the above simulation model, three response measurement points are set at the excitation location and two nonlinear locations. Additionally, in the off-line preprocessing stage, Gaussian white noise is produced by “band-limited white noise” module in the SIMULINK module of MATLAB. “Sample time” is set to 1/2048 s, and “noise power” is set to 0.1. After forming the transfer matrix in the off-line preprocessing stage, excitation force Excitation force identification results: ( Nonlinear force identification results: (a) 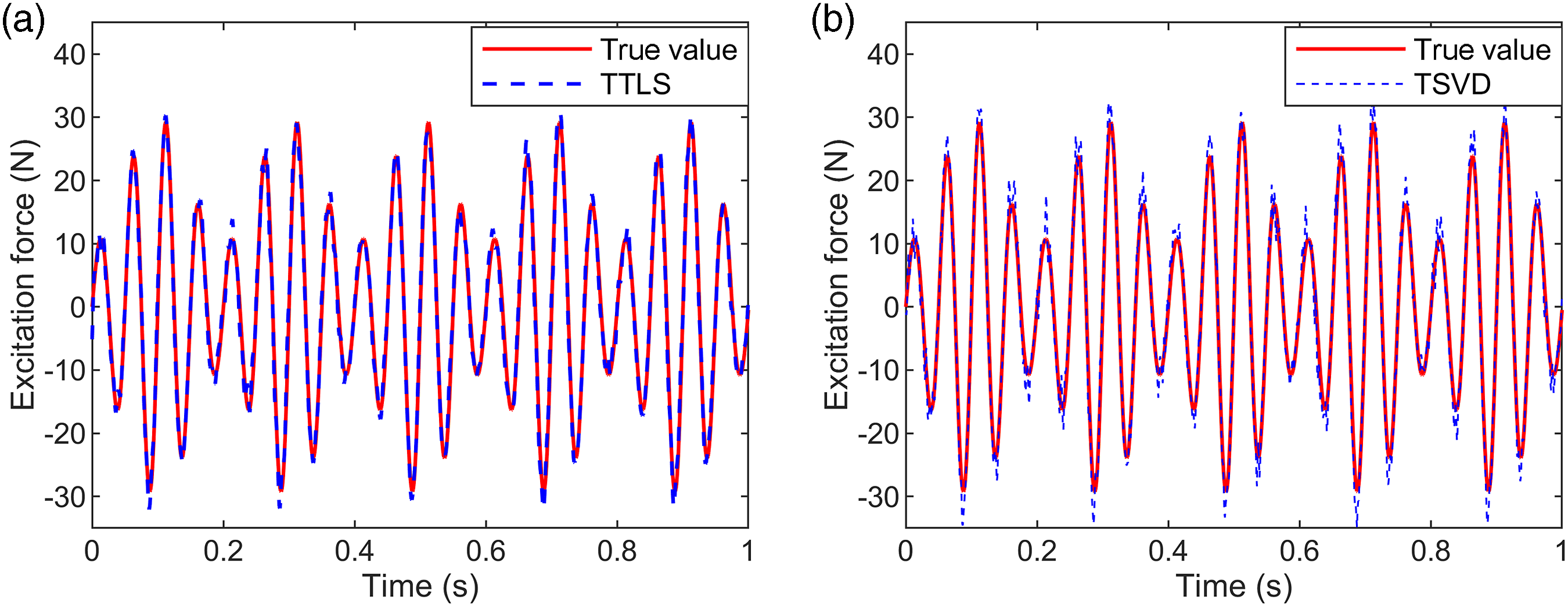
Case 3: Cantilever Test Bed with Clearance Nonlinearity
As shown in Figure 12, the experimental verification of the proposed force identification strategy of nonlinear structures is conducted on a cantilever test bed with clearance nonlinearity. The test bed includes a clearance device and cantilever beam. The clearance device is composed of two small cantilever beams and a fixed base. Additionally, as shown in the enlarged part of the figure, clearance nonlinearity in this test bed means that a gap exists between the contact head and cantilever. In the experiment, a vibration exciter is utilized to impose the excitation force acting on the test bed, and an impedance head which is a force sensor installed on the vibration exciter is used to measure the true excitation force. Eddy current sensors are installed at some measurement positions, and the measured displacement responses are used to identify the excitation force. Cantilever test bed with clearance nonlinearity.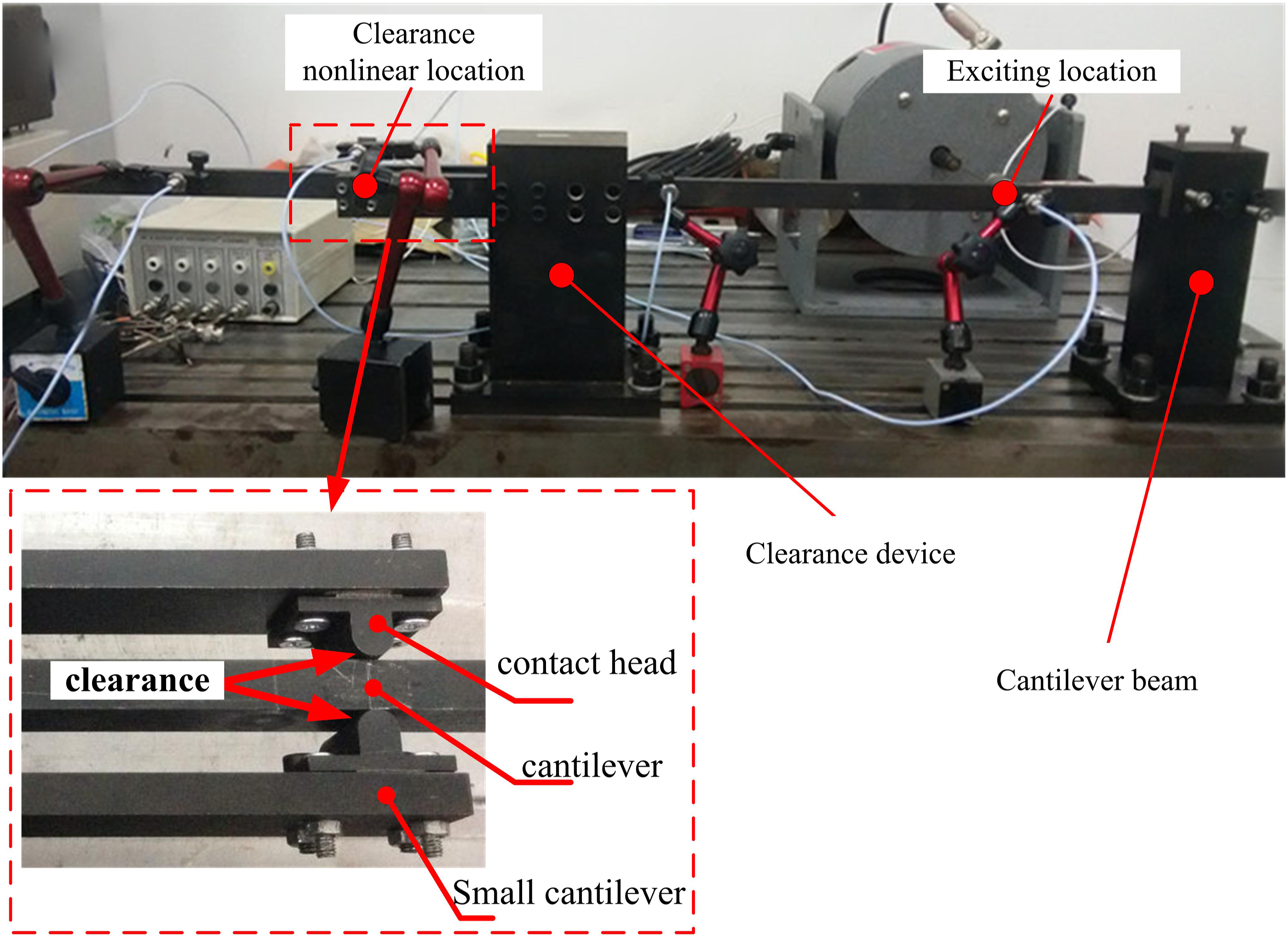
The clearance nonlinear force caused by clearance nonlinearity is given by

In the experiment, the excitation position and clearance nonlinearity are located at Linear frequency response function of underlying linear structure. (a) Excitation force identification results. (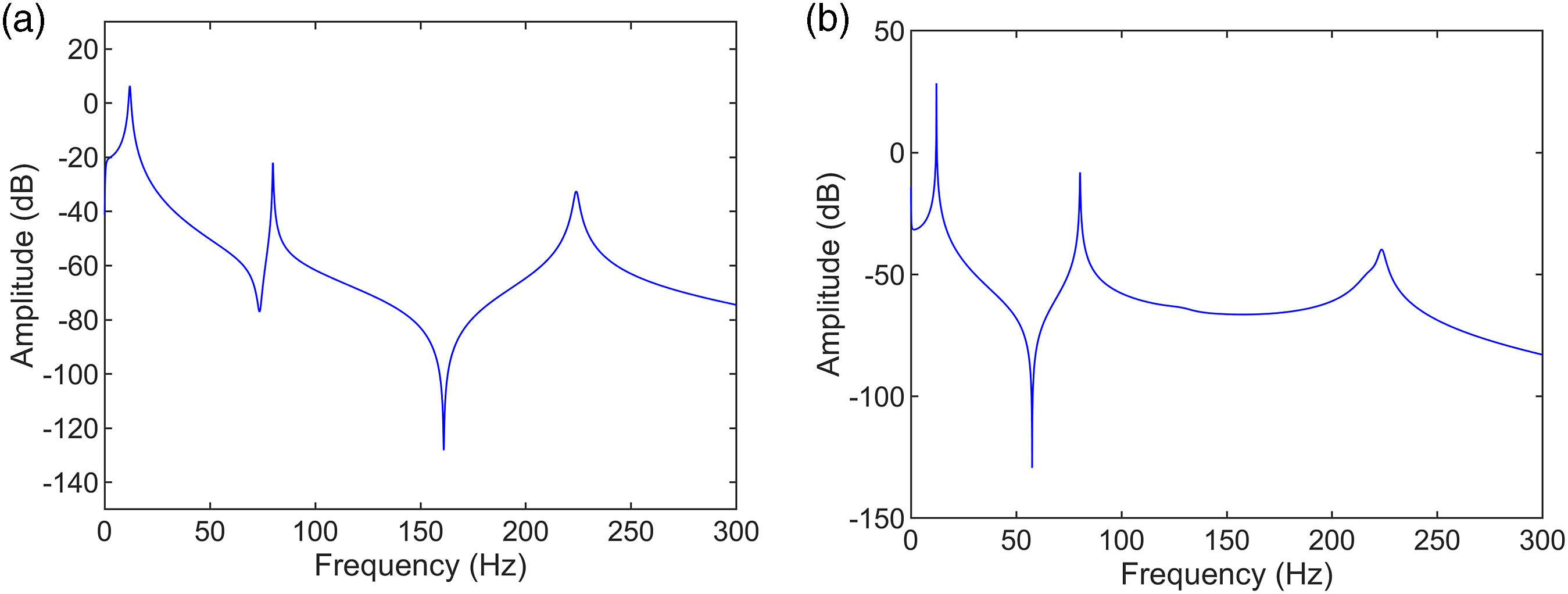
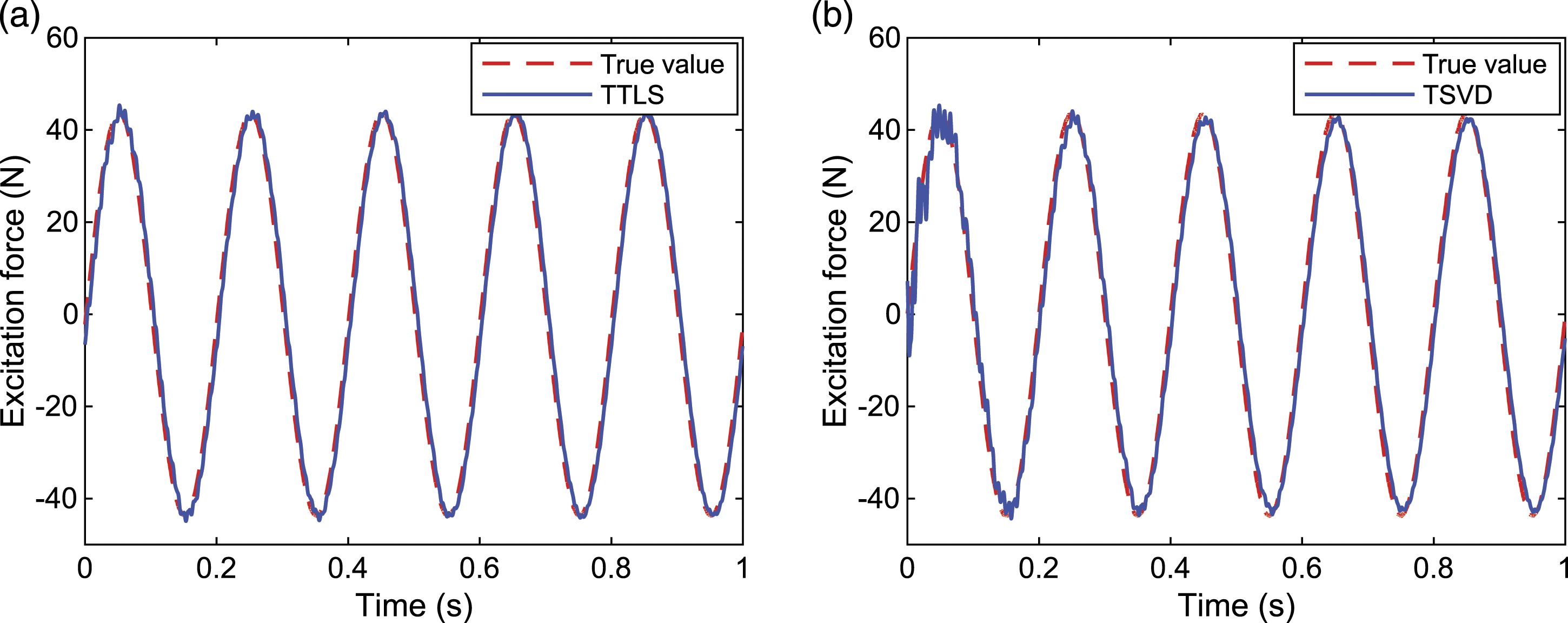
To further validate the performance of the proposed identification strategy, a new experiment is conducted by adjusting the excitation position and measurement position. The excitation position and clearance nonlinearity are located at Excitation force identification results.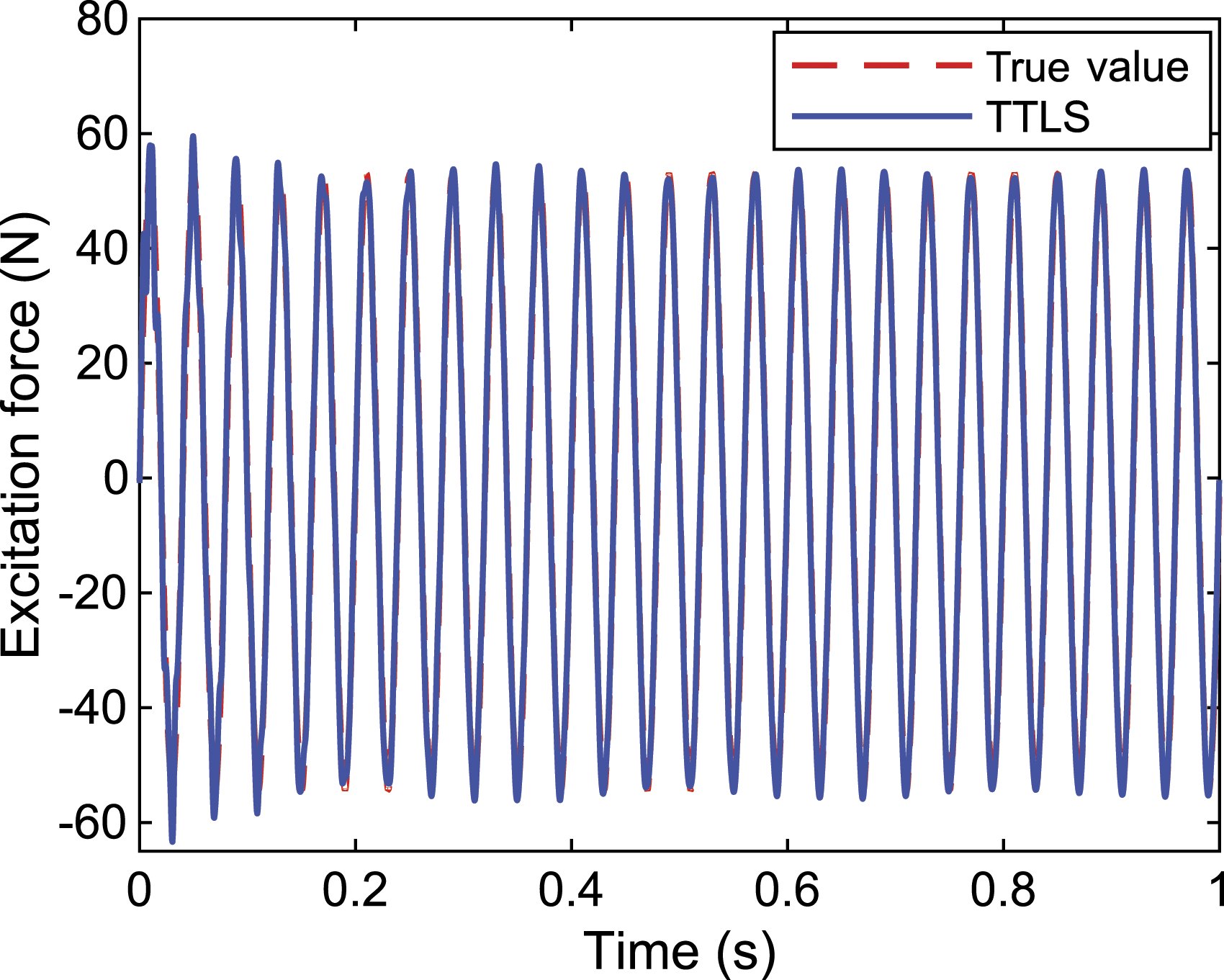
Conclusions
This study focused on identifying the excitation force of nonlinear structures, and a novel force identification strategy was proposed. The strategy contains two identification stages: an off-line preprocessing stage and a force identifying stage. For the identification strategy, based on a nonlinear state-space model, the force identification equation of the nonlinear structure was built. Its transfer matrix consists of coefficient matrices of the nonlinear state-space model. The input vector is an extended force vector composed of the nonlinear describing function and excitation force. The purpose of the off-line preprocessing stage is to apply NSI algorithm to obtain the transfer matrix. Then, in the force identifying stage, the TTLSs method in conjunction with GCV criterion is introduced to solve the ill-posed identification equation to eventually obtain the excitation force.
Two numerical simulation cases (five-DOF structure with cubic stiffness nonlinearity and cantilever model with two square nonlinearities) and one experiment case (cantilever test bed with clearance nonlinearity) were utilized to verify the effectiveness and feasibility of the proposed force identification strategy. The simulation and experimental results demonstrated that the proposed force identification strategy is suitable for identifying the external force of nonlinear structures and is not limited by the number and type of nonlinearities. It is worth noting that the main contribution here established a force identification equation of the nonlinear structure in time domain and solved the problem of obtaining the transfer matrix. Furthermore, the proposed identification strategy can extend the regularization methods that were previously used for a linear structure to a structure with the local nonlinearity. However, this paper does not propose a novel regularization method. Although identification results by TTLS method are acceptable, there are several problems. In particular, the singular value decomposition operation of the augmented matrix
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported financially by the National Natural Science Foundation of China (No. 51905422), Natural Science Basic Research Program of Shaanxi (No. 2020JQ-630), China Postdoctoral Science Foundation (No. 2020M673613XB), and Key Research and Development Program of Shaanxi (No. 2020ZDLGY14-06).