
Abstract
Sonic drilling technology uses the longitudinal vibration of a drill string to realize fast and effective drilling. By setting the top and bottom boundary conditions of the drill string during drilling, a dynamic model of flexible sonic string percussive drilling is established in this article. At a certain drilling depth, with the excitation frequencies as the control parameters, the maximum impact force and rock breaking energy utilization rate are used to evaluate the rock breaking capability of the sonic drilling system under the linear bit–rock model. A surface diagram of the maximum breaking force reached within the working frequencies and at varying drilling depths is obtained. The curve graph of the rock breaking energy utilization rate varying with drilling depth under the first six orders of resonance is also calculated. Analysing the influence of changing drilling parameters on the rock breaking capability of sonic drilling systems can provide theoretical guidance for the actual drilling process.
Keywords
Highlights
A physical model is established to study the interaction of the flexible drill string impacting rock The influences of the sonic vibration head and the isolation spring are considered in the mathematical model The maximum impact force reached in the working frequencies and drilling depths is calculated. The variation of system energy before and after bit impacting rock is revealed.
Introduction
The sonic technique is an advanced form of drilling that has the advantage of high efficiency in subsurface formations, exceptional power output and tooling penetration in a small, lightweight rig. 1 Sonic drilling can obtain high-quality samples without any drilling fluids, such as mud and air. 2 This feature makes sonic drilling the preferred method for environmental sampling. 3 Many types of sonic rigs have been developed and widely used in the field. Boart Longyear Company completed a borehole by sonic drilling with a depth of 274.32 m at the Bingham Canyon Mine in 2012. High frequencies and resonant energies are generated inside the sonic vibrator to advance the drilling string into subsurface formations. The maximum drilling depth and drilling speed are greatly affected by vibration conditions and parameters. Currently, drillers still rely on experience to control the resonant energy to match the formation being encountered to achieve the maximum rate of penetration (ROP). Furthermore, in the process of shallow formation sampling, pure soil drilling cannot be completely realized, and rocks are occasionally encountered; to sample quickly and safely, the sonic drilling rig must have a certain rock breaking ability.
The longitudinal vibration of the drilling string is not only adopted in sonic drilling rigs but also has been successfully applied to improve the drilling efficiency in deep rock breaking. A research project was conducted to develop resonance-enhanced drilling (RED) at the University of Aberdeen during the last decade. 4 The main idea behind this technology is to apply an adjustable high-frequency dynamic stress (generated by axial oscillations) in combination with the rotary action to enhance the penetration rates by creating resonance conditions between the drill bit and hard rocks. 5 Subsequently, a series of bit–rock interaction models considering a set of parameters were built to describe the main physical characteristics of rocks in a vibro-impact drilling system.6,7 The dynamic method for the stiffness identification of a rock via analysis of its corresponding impact duration was also developed to optimize the percussive drilling parameters. 8 The rock breaking mechanism under harmonic vibro-impact is investigated based on the displacement response and energy response. 9 These studies aim to superimpose axial drill bit vibrations upon normal rotary drilling to optimize the ROP for oil drilling in deep wells. These studies provide a highly valuable reference for drilling capability analyses of resonant sonic drilling on unexpected rocks.
The vibrations of the drilling strings dominate the ROP, drilling direction, core quality, and drilling tools. An understanding of the drilling string dynamics is crucial for the analysis of the drilling process. Jansen et al. 10 modelled the drilling string as a mass–spring–damper system and developed lumped parameter models based on an ordinary differential equation (ODE). However, the distributed nature of a slim drilling string could not be reflected by this model. Consequently, a distributed parameter model was built to analyse the characterization of the vibration in infinite dimensions. This model was used by Tucker et al., 11 Fridman et al., 12 Saldivar et al. 13 and Danciu et al. 14 and is suitable for analysing the drilling string dynamics in oil drilling, geothermal drilling, and other deep drilling.
Recently, some attempts have been made to understand the resonant sonic drilling process to improve the drilling efficiency. In 2015, Latrach and Beji 15 presented a vibration model as a hyperbolic partial differential equation 16 with Neumann boundary conditions as well as a resonant sonic vibrator drill model in complex soils. These researchers used this model to define a reference trajectory and proposed a flatness-based control scheme 17 guaranteeing efficient drilling. Mnafeg and Beji 18 presented a distributed parameter model of the drilling string vibrating in the axial direction. These investigators analytically quantified the system dynamics, the influence of the control variables, such as the resonant mode, and the weight on the bit. Ammari and Beji 19 determined the wave peak amplitude from the resonant drilling string mode shape, and system’s stability was analysed around a practical frequency mode.
The above sonic drilling studies mostly focus on soil drilling, except the works done by Sun et al. 20 They provided an innovative analytical solution of a partial differential mathematical physical equation based on the modelling of the impact of the resonant flexible drilling string on a rock induced by the sonic vibrator. The maximum impact force of the sonic drill on the rock, the effects of the drilling string length, the rock stiffness and the damping ratio were studied systematically. As the rock stiffness and the order of the resonance increase, the magnitude of the impact peak increases, and the impact duration becomes shorter. As the drilling hole is extended, the drilling string becomes longer, and the largest impulse obviously decreases. However, the effects of the mass of the sonic vibrator and the isolation spring between the sonic vibrator and support component were not considered in the model.
This article investigates the rock breaking capability of sonic drilling and considers the influences of the drill string lengths and excitation frequencies on the maximum impact force and energy. It is organized as follows. Firstly, we introduce the principles and system model. We present a composite joint mass–spring model of the sonic vibrator and a distributed parameter model of the drilling string axial vibrations. Secondly, we analyse the drill bit force and energy for sonic drilling on the rock. Finally, the conclusion is presented.
Mathematical modelling and solution
In the sonic vibration head, as shown in Figure 1, the double hydraulic motor drives the two eccentric shaft systems to achieve high-speed movement. Through the synchronization system, the eccentric shaft rotation speed is the same but in the opposite direction; the horizontal vibration forces cancel each other out, and the vertical direction of the force is strengthened, resulting in a downward drilling force by drilling vibration.
21
The sonic vibration head produces a vibration of 50–200 Hz to the drilling string. When the vibration overlaps with the natural resonance frequency of the drilling string, the system produces a resonance with a maximum drilling energy,
22
and the soil around the drilling string generates local liquefaction, which reduces the damping of the drilling string and surrounding strata to achieve rapid drilling. The working principle of the sonic drilling.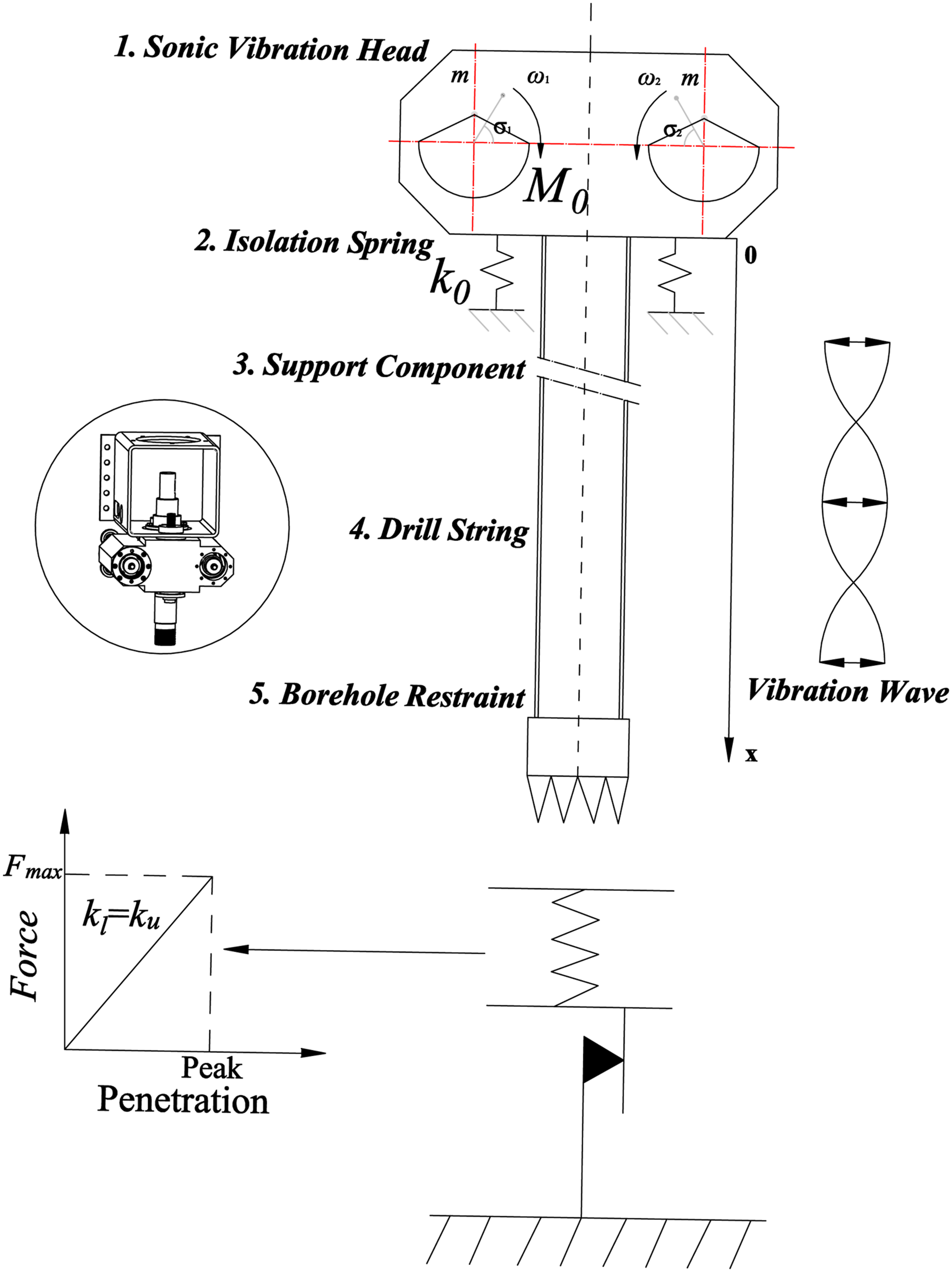
Mathematical modelling
The vibration characteristics of the sonic drilling system are closely related to the mass of the sonic vibration head, the stiffness of the isolation spring and the drilling parameters. In this article, the effects of the inertial force of the sonic vibration head and the elastic force of the isolation spring are considered to establish a coupled viscous damping longitudinal vibration model for the sonic vibration head, drilling string and stratum.
During drilling in the soil strata, the constrained reaction force at the bottom of the drilling string is assumed to be zero, and the energy input to the system by the excitation force in a period is equal to the energy dissipated by viscous damping of the hole wall; then, the steady-state vibration model of the system is established.
Nomenclature.
Step 1: No contact
When the sonic rig drills into the soil layer, that is, when the bit does not contact the rock, the surrounding soil layer interacts with the drilling string to form the main damping source in the sonic drilling. When the damping system is in steady-state vibration, it is assumed that the drilling string is a straight bar with equal section length l, and its longitudinal forced vibration governing equation is

The influence of the vibration head mass M
0
is applied in the governing equation (1) in the form of inertial forces. The elastic force of the isolation spring is applied at the top of the drilling string

Step 2: Loading and unloading contact
When the rock is suddenly drilled, the vibration mode of the steady longitudinal vibration drilling string will be seriously changed by the transient impact. If the energy input from the excitation force is ignored, then the governing equation is
The rock drilled into is regarded as an elastic medium with a stiffness coefficient of k
l
, and the upper and lower boundary conditions of the drilling string ar

The steady-state solution in no contact is the initial condition of the loading contact

The particle on the steady longitudinal vibration drilling string moves in a simple harmonic motion around its own equilibrium position, and the drill bit may encounter the rock at any position. While the bit is in its balance position, the end velocity is at its maximum. This article will examine the process in which the bit is just in balance before impact and then begins to hit and bounce off the rock.
Solution method and natural frequency of the system
Xiao et al. 23 obtained the explicit expression of the modal frequency with respect to the vibrator mass and system structure parameters through mathematical analysis, but the vibrator mass was still placed in the top boundary condition. To consider the influence of the vibration head mass, it is placed in the governing equation by means of the inertial force, which leads to the elastic support boundary. The characteristic equations represented by the symmetric (off-diagonal) modal mass matrix and the diagonal modal stiffness matrix are obtained by modifying the traditional separation variable solution method, and the inherent vibration characteristics of the system are solved. Then, the vibration response is solved according to the Galerkin-type matrix equation. For the solution of the steady-state and transient vibration problems, refer to Appendix 1 and Appendix 2 for details.
Technical parameters of the sonic vibrator and drilling string. 20

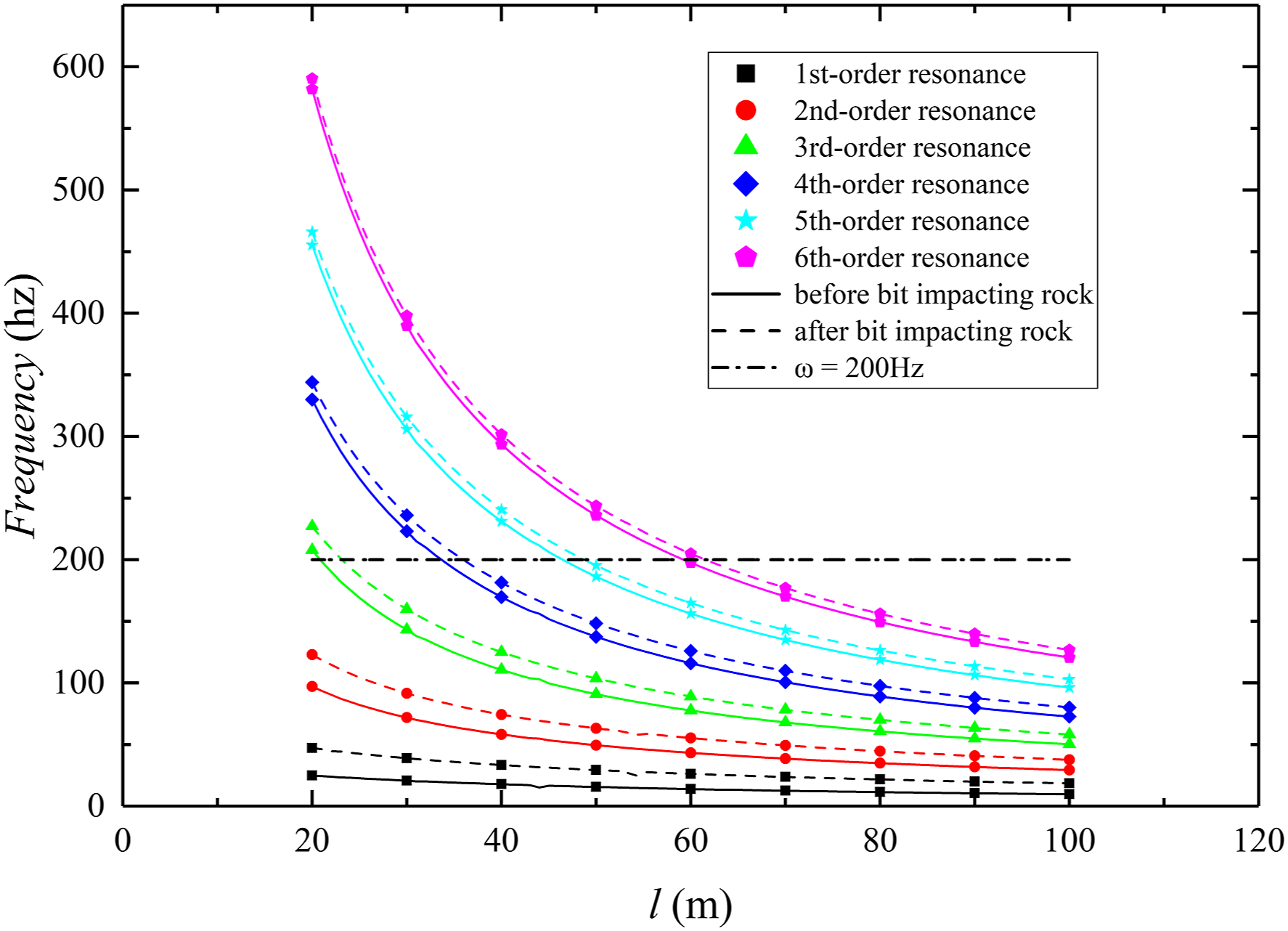
The first six natural frequencies of the system before and after impacting rock at different drill string lengths.
As seen from Figure 2, before and after impacting rock, the natural frequencies of the system are inversely proportional to the drilling depths; especially at higher orders, the natural frequencies decrease more obviously as the drilling depths deepen. In addition, it can be seen that the first six natural frequencies of the system after the impact are slightly higher than those before the impact. This is due to the introduction of elastic rocks at the end of the drill string in the model, which leads to an increase in the stiffness of the system. The general working frequencies of sonic drilling are 0–200 Hz. Figure 2 can provide guidance for the actual drilling process.
Analysis of the drilling string bottom force and energy
When the drill bit hits the rock layer, the vibration response of the system changes instantaneously, and the bottom of the drilling string exerts a force on the rock. This section discusses the influencing factors of this force and then analyses the rock breaking energy.
Analysis of the drilling string bottom force
According to (28), the natural frequency of the system is calculated. The vibration mode (19) satisfies the boundary conditions (6) and (7), the modal coordinates (44) and (45) are determined by the initial conditions (8) and (9) and the elastic support displacement at the bottom of the drilling string is obtained
Assuming that the initial contact time and position are t
0
and 
The maximum force exerted on the rock at the bottom of the drilling string can be found by the above formula
Without considering the influence of the sonic vibration head mass and isolation spring on the top, reference 19 indicates that with increasing drilling string length, the peak value of the impact force on the rock clearly decreases, but the impact duration increases. When the damping coefficient increases, the peak value of the impact force obviously decreases but has little influence on the duration of the impact. In view of the complex structure of the sonic vibration head on the top of the sonic rig, the mass of the sonic vibration head on the top is relatively large, which consumes part of the system energy. The top isolation spring also stores a large amount of energy. It is necessary to systematically study the rock breaking capability of sonic drilling considering the influence of the top sonic vibration head mass and top isolation spring stiffness.
In sonic drilling systems, with increasing drilling depth, the excitation frequencies are the main parameter controlling the drilling efficiency, and in the process of impacting rocks, we often focus on the maximum impact force. Figure 3 shows that the maximum impact forces reached at excitation frequencies of 0–200 Hz and drilling depths of 20–100 m. Peak curve of the impact force as a function of the drilling depth and excitation frequency.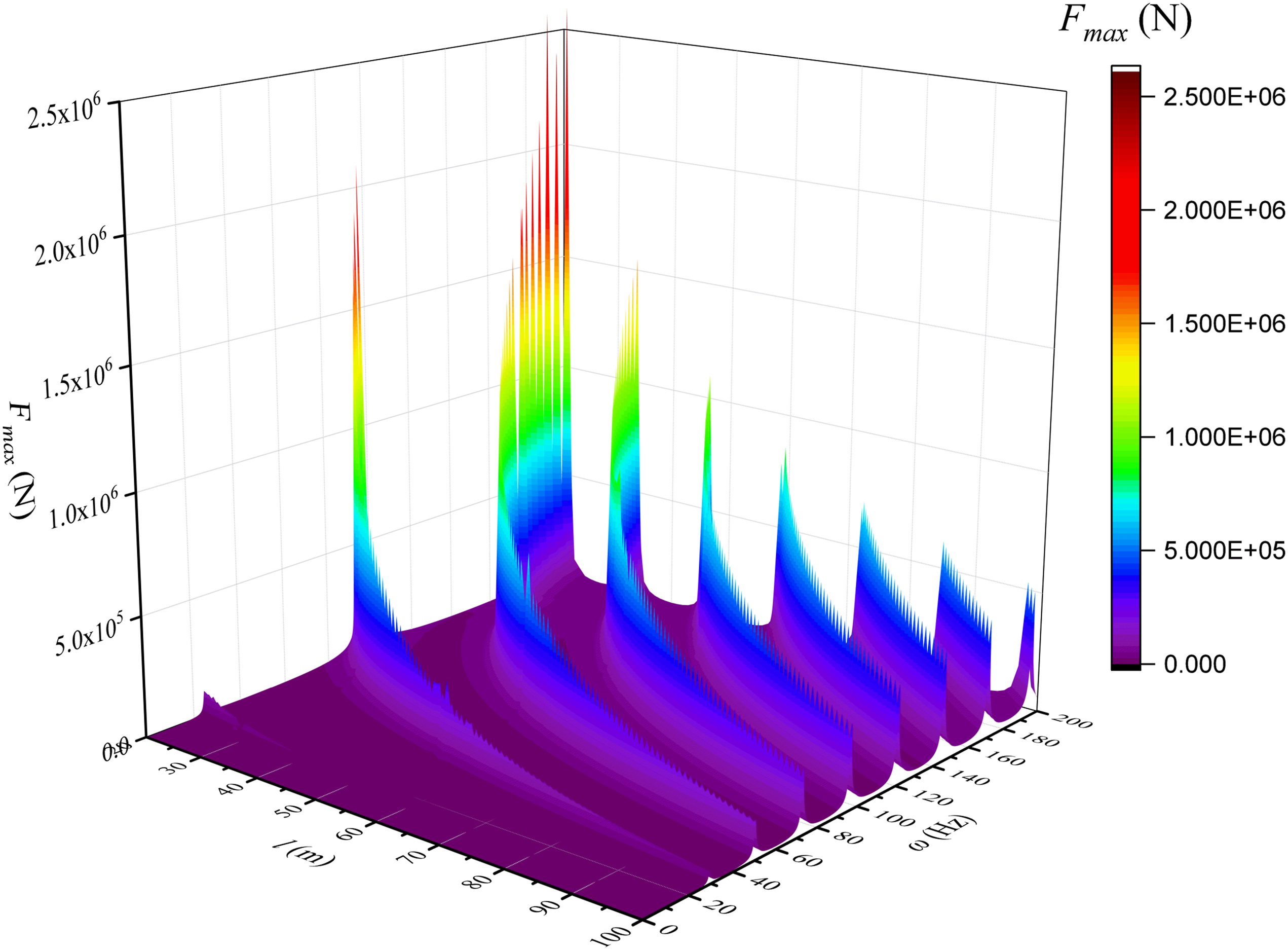
Figure 3 clearly shows that at shallower drilling depths, there are fewer local peak points of the maximum impact force at working frequencies of 0–200 Hz, and the higher the resonance frequency is, the higher the peak point will be. With increasing drilling depth, the peak points gradually decrease, but more local peak points appear in the working frequency range, reaching 8 at a drilling depth of 100 m. It can also be found that the peak point is relatively higher at a higher resonance frequency. In summary, when sonic drilling is in a resonance working environment, it can achieve a greater impact force and then may reach the strength of the rock, thus breaking the rock.
Analysis of the drilling string energy
Energy calculation
The variation mechanism of the energy response is crucial for tracking the drilling process. Methods of modelling of energy response of rock with and without damping under harmonic vibro-impacting are undertaken and the corresponding equations of energy dissipation are presented in this study.
24
During the sonic drilling process, energy conversion and storage mainly include the sonic vibration head kinetic energy
Kinetic energy of the sonic vibration head is
Potential energy of the isolation spring is
Kinetic energy of the drilling string is
Strain energy of the drilling string is
Potential energy of the spring at rock is
Energy distribution
Before drilling into the rock, the system is in a steady-state resonance condition, while after drilling into the rock, the system shows a transient non-resonance response, and the energy stored in each part will change, as shown in Figure 4. Before drilling into the rock, the energy in the drilling string system changes over time in a relatively stable manner, and the kinetic energy and potential energy of the system alternately change. When drilling into the rock, the steady-state form is destroyed, the mechanical energy in the drilling string decreases, while the potential energy expressed by equation (17) in the rock increases. As time advances, there will be a maximum rock potential energy under certain impact conditions. It is necessary to study how much of system’s energy can be transferred to the rock at the hole bottom, which determines its ability to break rock. The proportion of the maximum rock potential energy to total energy is defined as α. Changes over time in the total energy and each part of energy of the system before (solid lines) and after (dash lines) bit impacting rock (l = 48 m, 2nd-order resonance).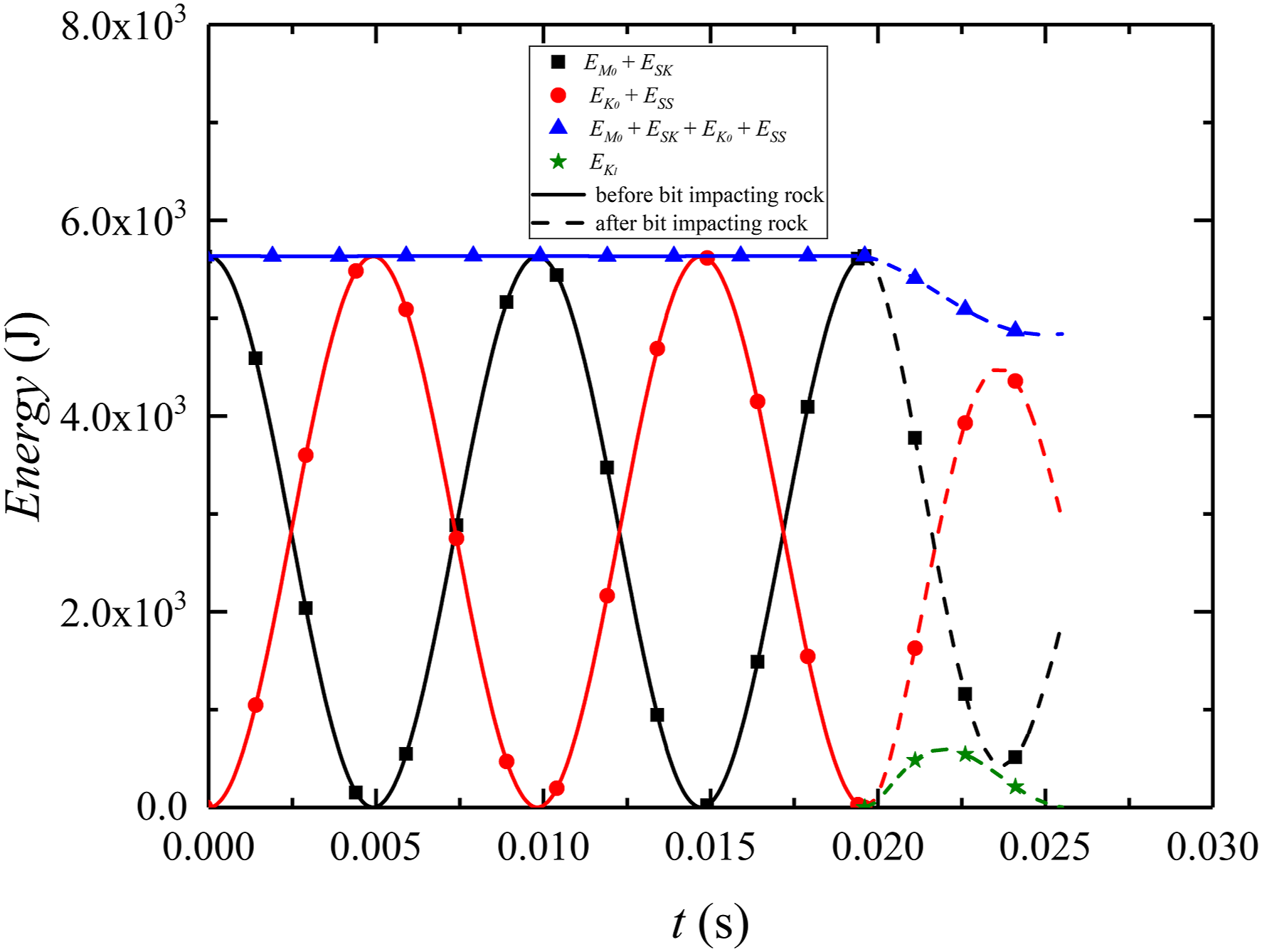
Before drilling into the rock, the eccentric motor keeps the sonic drilling string system working, the resonance state ensures high drilling ability and the viscous damping keeps dissipating energy. After impacting the rock, the bottom boundary conditions will change, the vibration mode and natural frequency of the drilling string will also change accordingly and the drilling string system will not be in a resonance state. It can be found from Figure 3 that the peak point of the maximum impact force only appears at the resonant frequency and is significantly higher than those achieved at the surrounding non-resonant frequencies. Therefore, it is necessary to analyse the proportion of rock breaking energy in the total energy of the system under the working conditions of resonance. The curve of rock breaking energy utilization with the drilling depths under resonance is shown in Figure 5. The curve of system’s rock breaking energy utilization rate changes with the drilling depth under resonance conditions.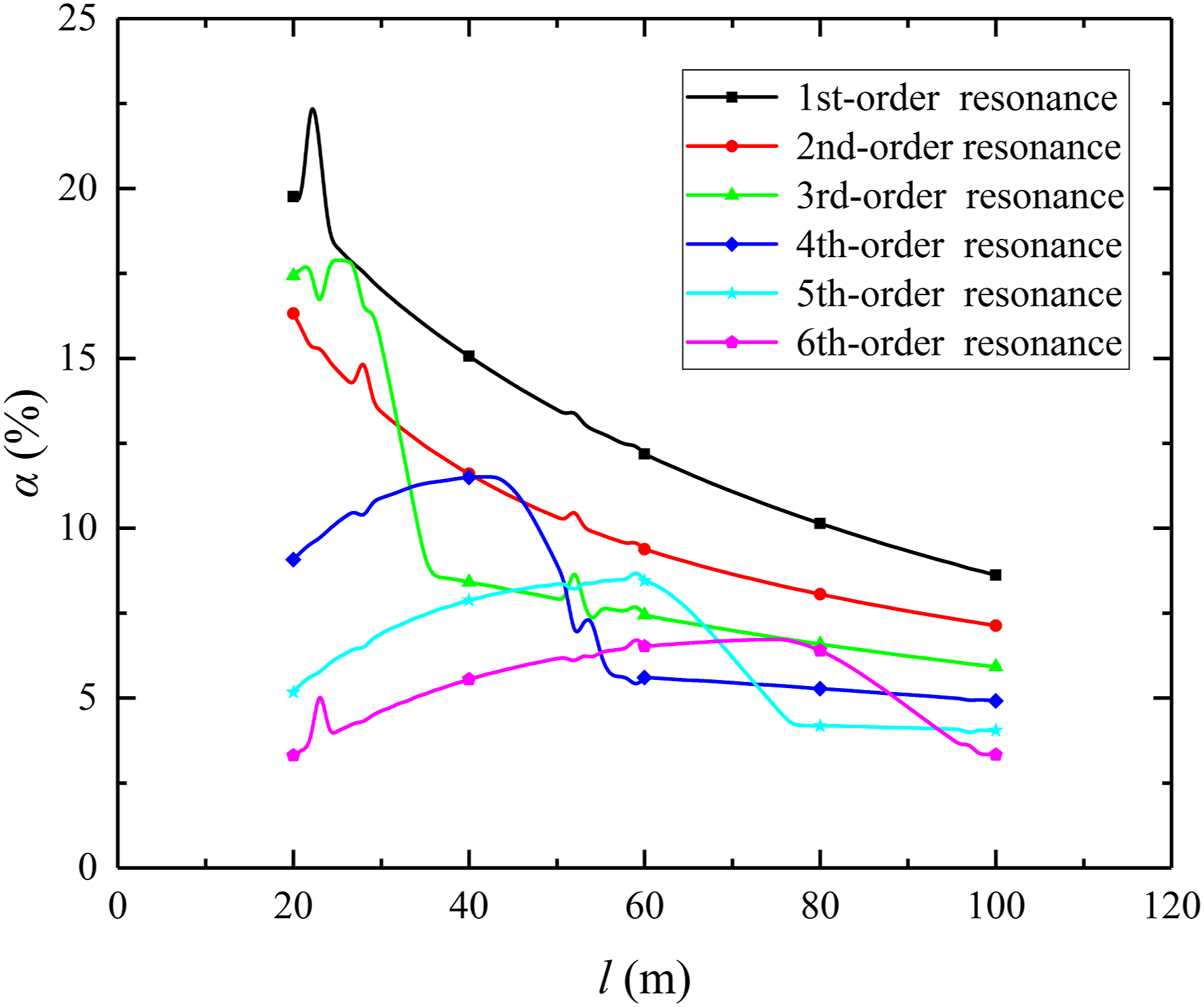
Figure 5 shows that in the case of the first sixth-order resonance, with increasing drilling depth, the rock breaking energy utilization rate of the sonic drilling system shows different rules. When the system works at the lower resonance of orders 1 and 2, with the deepening of the drilling depths, the rock breaking energy utilization rate shows a downward trend. However, in the case of higher resonance, with the deepening of drilling depths, the rock breaking energy utilization rate will first increase and then decrease abruptly, and with the increase of resonance order, the location of this sudden change will be delayed correspondingly. In addition, the rock breaking energy utilization rate is relatively high in the lower resonance working environment. Therefore, in combination with Figure 3, under specific formation conditions, choosing the appropriate frequency can not only achieve a certain impact force but also obtain a higher rock breaking energy utilization rate.
Conclusions
The vibration characteristics of the sonic drilling system are closely related to the sonic vibration head mass, isolation spring stiffness and drilling parameters. The influences of the inertia force of the sonic vibration head and the elastic force of the isolation spring are considered to establish a coupled viscous damping longitudinal vibration model with a top excitation system to achieve the best drilling effect on a linear rock model.
Within the working frequency range, as the drilling depths deepen, the resonance frequency becomes denser, and the maximum impact force decreases significantly. When the system works at a lower resonance, the rock breaking energy utilization rate decreases with increasing drilling depth. However, in the case of higher resonance, the rock breaking energy utilization rate will increase first and then decrease abruptly, and with the increase in resonance order, the position of this sudden change will be delayed correspondingly. The analyses of the energy distribution indicate that the mechanical energy of the drill string provides the main energy for rock breaking, and only a small part of the energy can be transferred to the hole bottom in the deep drilling case. Therefore, simple sonic drilling is not suitable for deep hole rock breaking.
To sample quickly and safely, the sonic drilling rig should have a certain ability to break unexpected rocks. It is necessary to reasonably design each part, including the sonic vibration head structure and mass and the isolation spring mechanical properties. Additionally, the excitation frequency also needs to be tuned with the resonance order and drilling depth. This article provides a solid foundation for exploring the more complex flexible impact theory.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: This work was partially supported by National Key R&D Program of China (No.2018YFC1802404); National Natural Science Foundation of China [Grant No. 41672366] and Fundamental Research Funds for the Central Universities [Grant No. 2652018093].
Appendix 1. No contact vibration response
The effects of the vibration head mass and isolation spring on the intrinsic characteristics and vibration response of the drilling string system under excitation are considered. The influence of the vibration head mass is in the governing equation (1) in the form of the inertial force, and the elastic force of the isolation spring is the boundary condition (3) of the upper end of the drilling string. The displacement of the drilling string is expanded into an infinite series of regular modes by means of mode superposition