
Abstract
Based on the planetary gear transmission system considering the coupling effects of friction and elastohydrodynamic lubrication, a torsional dynamic model considering friction, oil film, time-varying meshing stiffness, meshing damping, and gear backlash is established. The Runge–Kutta numerical method is used to solve the vibration equation of the system. The bifurcation diagram and largest Lyapunov exponent are used to analyze the dynamic characteristics of the system under different bifurcation parameters such as the excitation frequency, lubricant viscosity, sun–planet backlash, and planet–ring backlash. The numerical results demonstrate that with the increase of excitation frequency, the system exhibits rich nonlinear dynamic characteristics such as short-period motion, long-period motion, and chaotic motion. With the increase of lubricant viscosity, the chaotic motion of the system is suppressed at low excitation frequency and the periodic motion of the system increases at high excitation frequency. With the increase of sun–planet backlash, the chaotic motion of the system increases at low excitation frequency, and the bifurcation characteristics become complicated at high excitation frequency and enters chaotic motion in advance. With the increase of ring–planet backlash, the system delays into chaotic motion at low excitation frequency and bifurcates from single-period motion to multi-period motion in advance at high excitation frequency.
Keywords
Introduction
The gear system is one of the most widely used power transmission devices. In engineering practice, there will be a squeeze oil film between the meshing gear pairs. The coupling effect of oil film and friction constitutes a strong nonlinear excitation factor, which affects the vibration characteristics of the gear system. For planetary gear system with complicated structure, its vibration characteristics will be more complicated. Therefore, it is necessary to study the nonlinear dynamic characteristics of the gear system under the coupled effects of friction and lubrication.
For the study of the nonlinear characteristics of the gear system, in order to simplify the model and calculation, the lubrication factors are often ignored, and main factors considered are friction, time-varying meshing stiffness, backlash, and comprehensive error. For the single pair gear model, Kahraman and Singh 1 first coupled the nonlinear factors of clearance and stiffness to analyze the dynamic characteristics of the single pair gear system. Chen and Tang 2 further refined the backlash factors, and used constant backlash, time-varying backlash, and random backlash as analysis parameters. However, only the amplitude–frequency response and time–domain curve of the system were obtained, and the bifurcation characteristics of the system were not studied. With the development of dynamics theory, the friction was considered in the model. Liu et al. 3 concluded that sliding friction can reduce the dynamic transmission error of the system based on the spur gear model considering sliding friction and illustrated by the bifurcation diagram that reducing the pinion speed can enhance the periodic motion of the system. Fang et al. 4 analyzed the influence of random load and friction on the transient characteristics by Monte Carlo method. Han and Qi 5 introduced the calculation method of friction excitation and time-varying meshing stiffness based on the 8 DOF helical gear model and obtained the dynamic response under steady state through numerical calculation. Wang et al. 6 established a bending-torsion coupled spur gear system model considering factors such as stiffness fluctuation, transmission error, and backlash through an improved stiffness calculation model. The nonlinear analysis shows that the system exhibits different periods, subharmonic and chaotic motion under the coupling of bending and torsional vibrations. Xu and Qin 7 established the vibration analysis model of the flexible spur ring gears by using the two-dimensional Timoshenko beam theory, and obtained that the vibration characteristics of the ring gear are different under different connection modes, providing reference for the dynamic characteristics analysis of the planetary gear. Aiming at the study of the dynamic characteristics of the planetary gear system, Li and Zhu 8 used Poincaré-like cell-to-cell mapping method to obtain that the planetary gear system with certain parameters has four coexisting periodic orbits, while the shooting method does not have the ability to search for coexisting periodic tracks globally. Gao and Zhang 9 analyzed the effects of layout parameters on the tooth surface friction and time-varying meshing stiffness based on the planetary gear torsion model. It was found that due to the existence of friction, the system jumps ahead and the gear’s impact motion increases. Sheng et al. 10 further improved the model to increase the geometric eccentricity error of the gear and the bearing backlash and qualitatively studied the motion state of the system under different bifurcation parameters. Xiang et al. 11 established a nonlinear torsional model of a multistage gear transmission system consisting of planetary gears and two parallel gear stages, and concluded that the system has rich nonlinear dynamic characteristics such as periodic motion and nonperiodic motion and chaotic motion. Hou and Cao 12 added the torsional effect of the rotor on the basis of the planetary gear system and used the bifurcation diagram and the largest Lyapunov exponent (LLE) to explain the torsional nonlinear response of the system. Zhu et al. 13 studied the effect of backlash on an encased differential planetary gear system. The results show that the smaller backlash causes bilateral shock of meshing teeth, which leads to chaotic motion of the system. The system is in stable quasiperiodic motion with the bigger backlash. The backlash change of any transmission stage has significant influence on gear meshing force and motion state of its own stage.
Lubrication factors are closely related to the dynamic characteristics of gear. Liu et al. 14 reviewed the effect of lubricant oil on the efficiency, contact fatigue, and dynamics of gear systems, and concluded that lubricant oil with a relatively high viscosity can reduce the vibration and noise. Starting from the design of the gear body structure, the gear meshing vibration can also be reduced. Ramadani et al.15,16 designed the gear body as a cellular lattice structure and reduced the stress concentration area through topology optimization. Finally, it was verified by experiments that the lattice structure can effectively reduce gear vibration, and the gaps in the lattice structure can also be filled polymer, which can further reduce vibration. The research of gear lubrication dynamics mainly focuses on single pair of meshing gears. Houser et al. 17 experimentally studied the influence of friction on the vibration and noise of the gearbox, and concluded that the friction force dominates the load transmitted to the casing, and the oil viscosity and surface roughness have a great influence on the system vibration performance. Brancati et al. 18 added the oil film damping force to the gear dynamic model by considering the damping lubricant effect in the meshing gear backlash and concluded that the existence of lubricant reduced the high-frequency vibration of gear. Theodossiades et al. 19 studied the dynamic response of gears under the combined action of gear oil film force and bearing oil film force considering the effect of lubricant film and obtained that the hydrodynamic lubricant film behaves as a time-varying nonlinear spring-damper element. Zhang et al. 20 calculated the stiffness and damping of the oil film based on the line contact vibration model of the elastohydrodynamic lubrication (EHL). The results show that the viscosity effect of the lubricant can indeed improve the vibration performance compared with dry contact, and the contribution of the oil film stiffness to the total stiffness is small.
It can be seen from the above studies that the research model for gear lubrication is mainly the single pair of gear pairs, but there are few planetary gear models that consider the influence of lubrication factors. At the same time, the coupling effect of friction dynamics and lubrication has not attracted enough attention. It is rare to analyze the influence of lubrication factors on bifurcation and chaos characteristics in planetary gear system. Based on the above analysis, in order to make the planetary gear system model close to reality and improve the accuracy of the analysis results, both lubrication and friction should be considered in the dynamic model. Because the viscosity of the oil film affects the stiffness and damping of the system, the dynamic characteristics of the gear system will be more complicated. In this paper, the dynamic model of planetary gear system considering friction, oil film, time-varying meshing stiffness, meshing damping, and backlash is established and the system equation is solved by Runge–Kutta numerical method. Finally, the bifurcation and chaos characteristics of the system are analyzed by bifurcation diagram and LLE. At the same time, the motion sate of system is explained by combining the Poincaré map, phase diagram, time history, and fast fourier transform (FFT) spectrum.
The dynamic model of the system
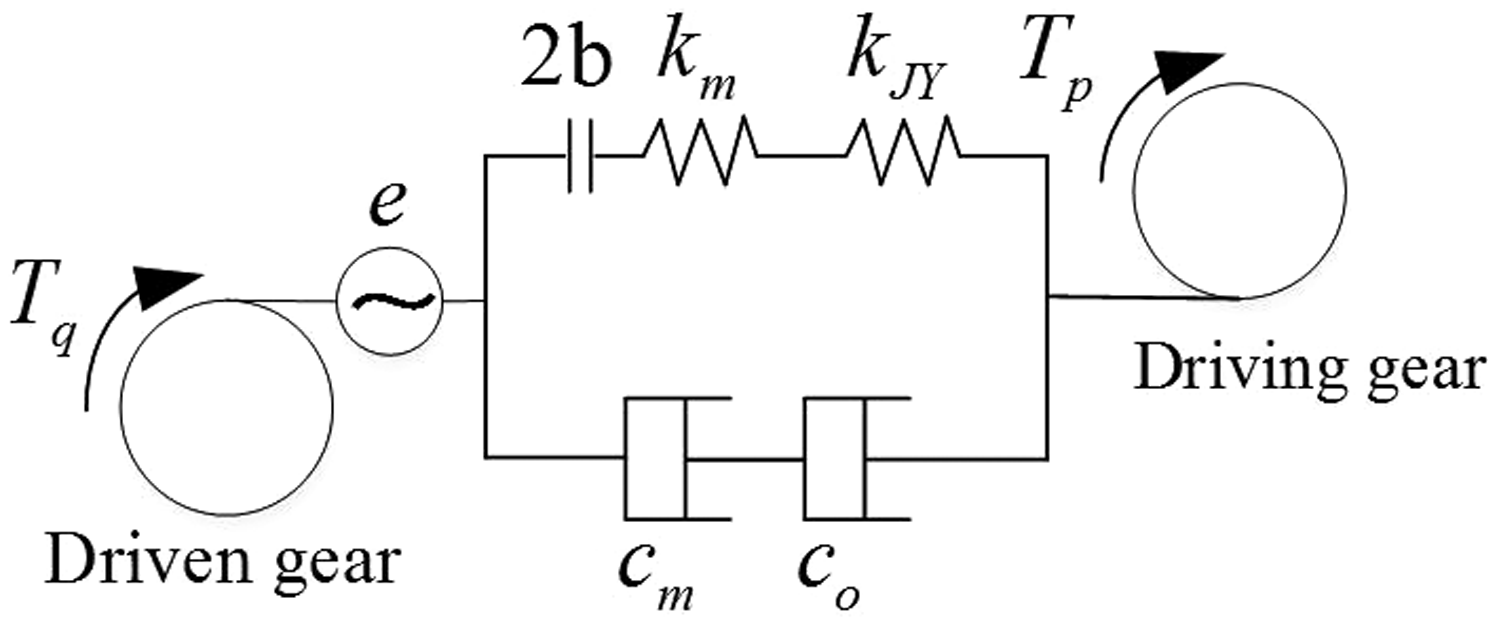
The torsional dynamics model of the planetary gear system is established by using the concentrated mass method, as shown in Figure 1. In this model, the meshing gears are involute spur gears, and the meshing tooth surfaces are connected by spring-damping system. The mass and moment of inertia of each planet gear are the same, and parameters such as backlash, comprehensive meshing error, and damping ratio of the same type of members are also the same. The model consists basic components such as planet carrier (
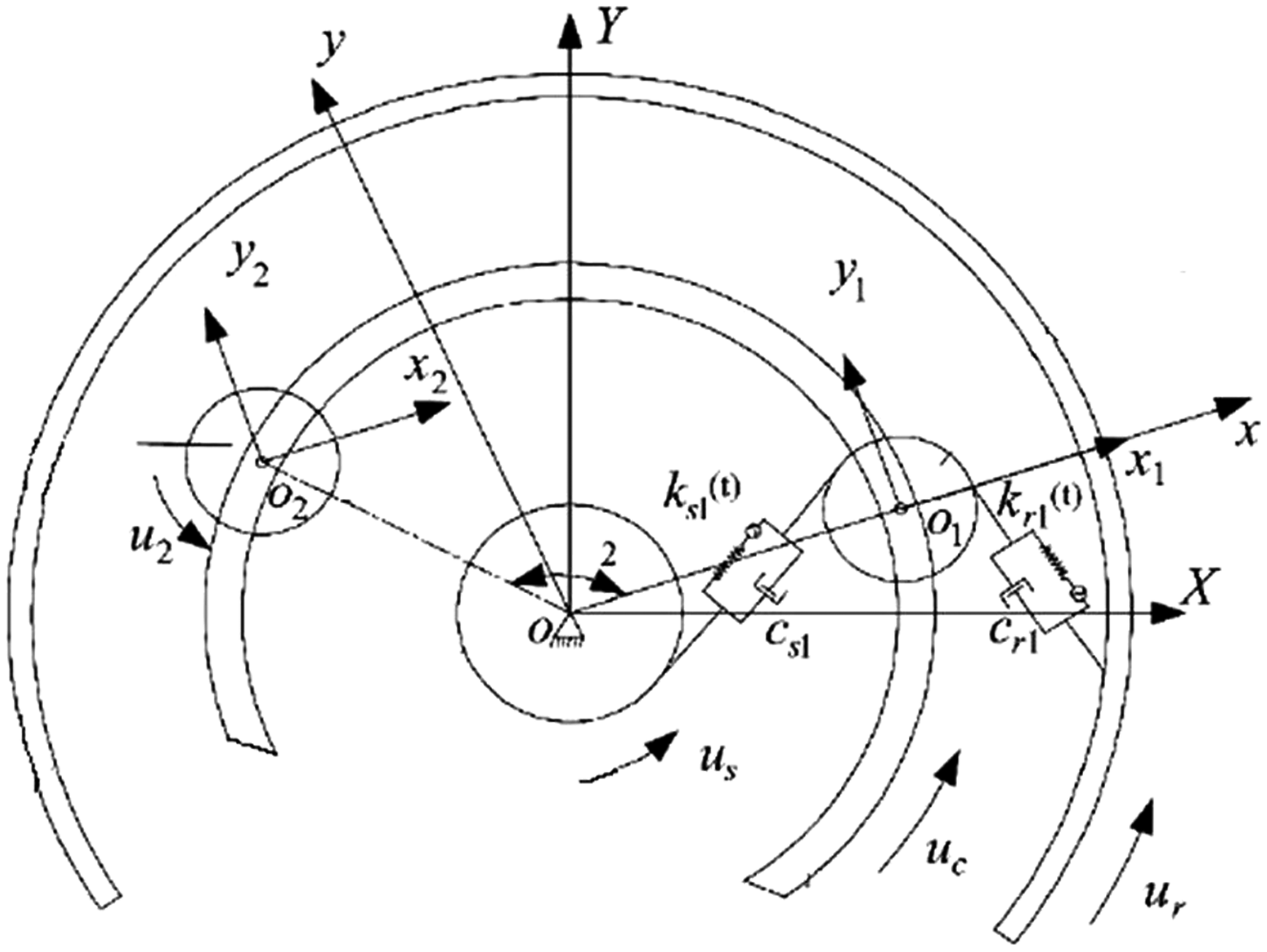
Dynamic model of planetary gear transmission system.
Dynamic equations of the system
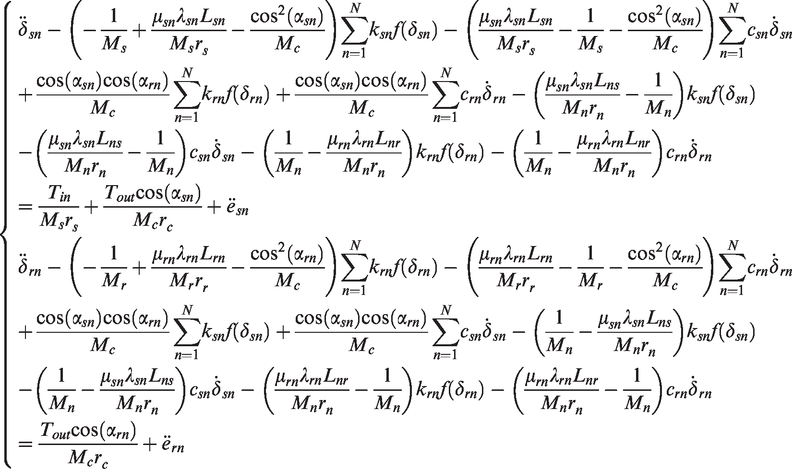
Based on the literature,
21
the coupling effects of friction and lubrication are further considered. The torsional dynamic vibration equation of the planetary gear system can be established by Newton’s law as follows
Let
The dynamic engagement force of the gear pair is related to the system damping and stiffness, and the equation of the time-varying dynamic engagement force can be expressed as

Under the premise of not affecting the results, the eccentricity error of the gear is ignored in the model, so the comprehensive meshing error is the static meshing error. The static transmission error of the gear mainly comes from the base joint error and tooth shape error of the gear pair, which can be expressed as the sine function with the meshing frequency as follows
22

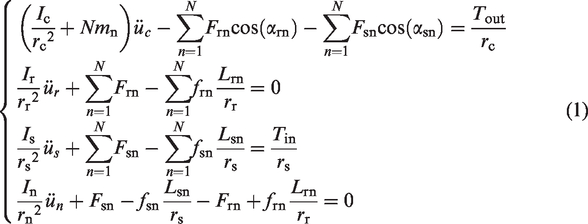
Considering that there may be three meshing states of each gear pair in the planetary gear transmission, namely normal meshing, empty meshing, and tooth back meshing, the segmental function
Nonlinear function of backlash.
The expression of the relative displacement of the gear on the meshing line can be given by

Equivalent stiffness of meshing gear pairs considering squeeze oil film
According to the definition, the load applied by one or more pairs of gear teeth engaged on the meshing line to produce a unit deflection on the unit tooth width is called meshing stiffness.
Under the condition of mixed EHL, the deflection of spur gears under external force is the sum of gear elastic deformation and oil film deformation, so the equivalent meshing stiffness of spur gears is given by
24

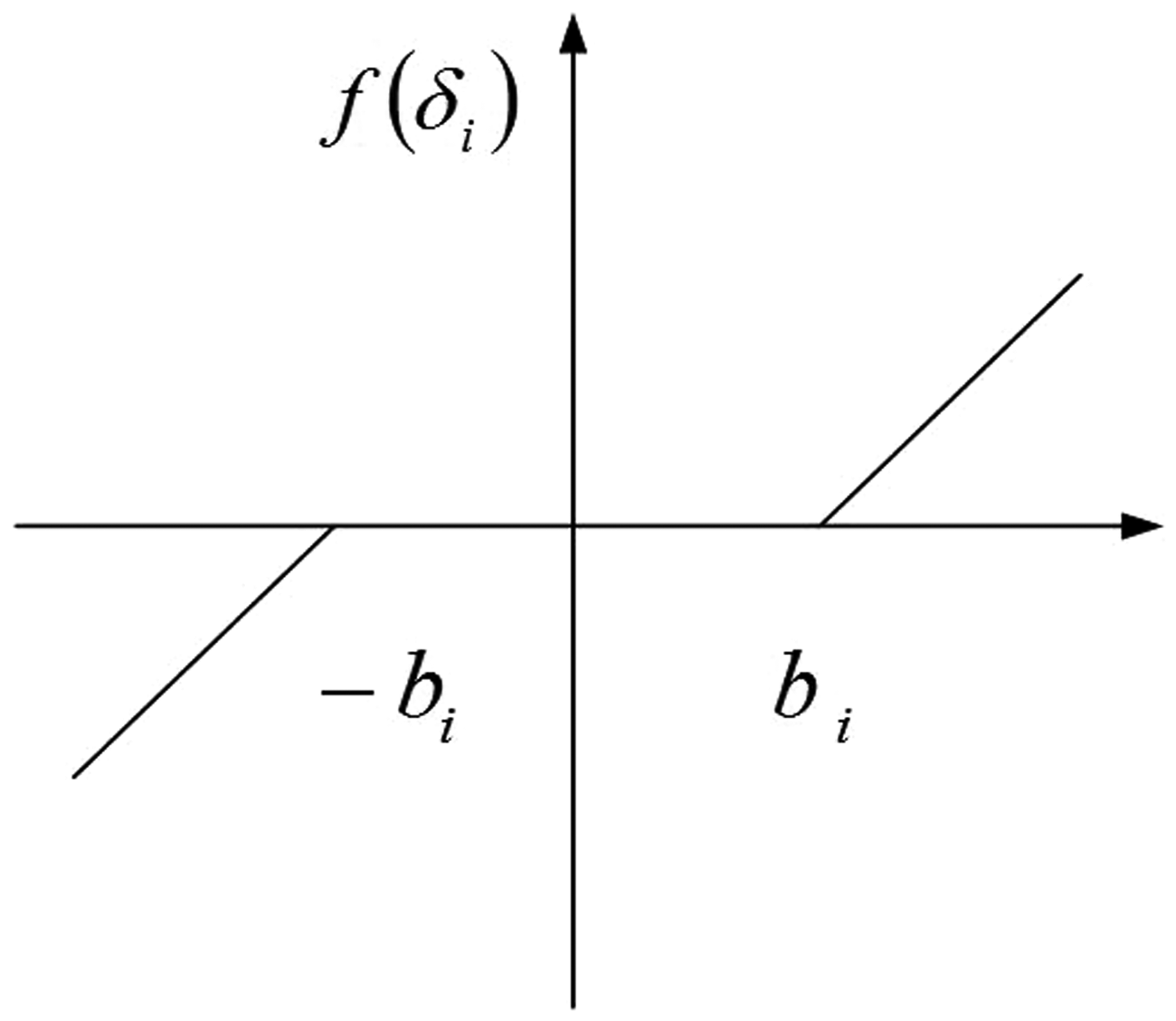
In actual working conditions, when the gear tooth vibrate out of the stable meshing state, there is a squeezing effect due to the presence of the oil film in the backlash to reduce vibration. For the gear lubrication model, the meshing gear pair can be assumed to be in contact with two cylinders, and then simplified to the contact between cylinder with an equivalent radius of curvature and rigid plane, as shown in Figure 3.
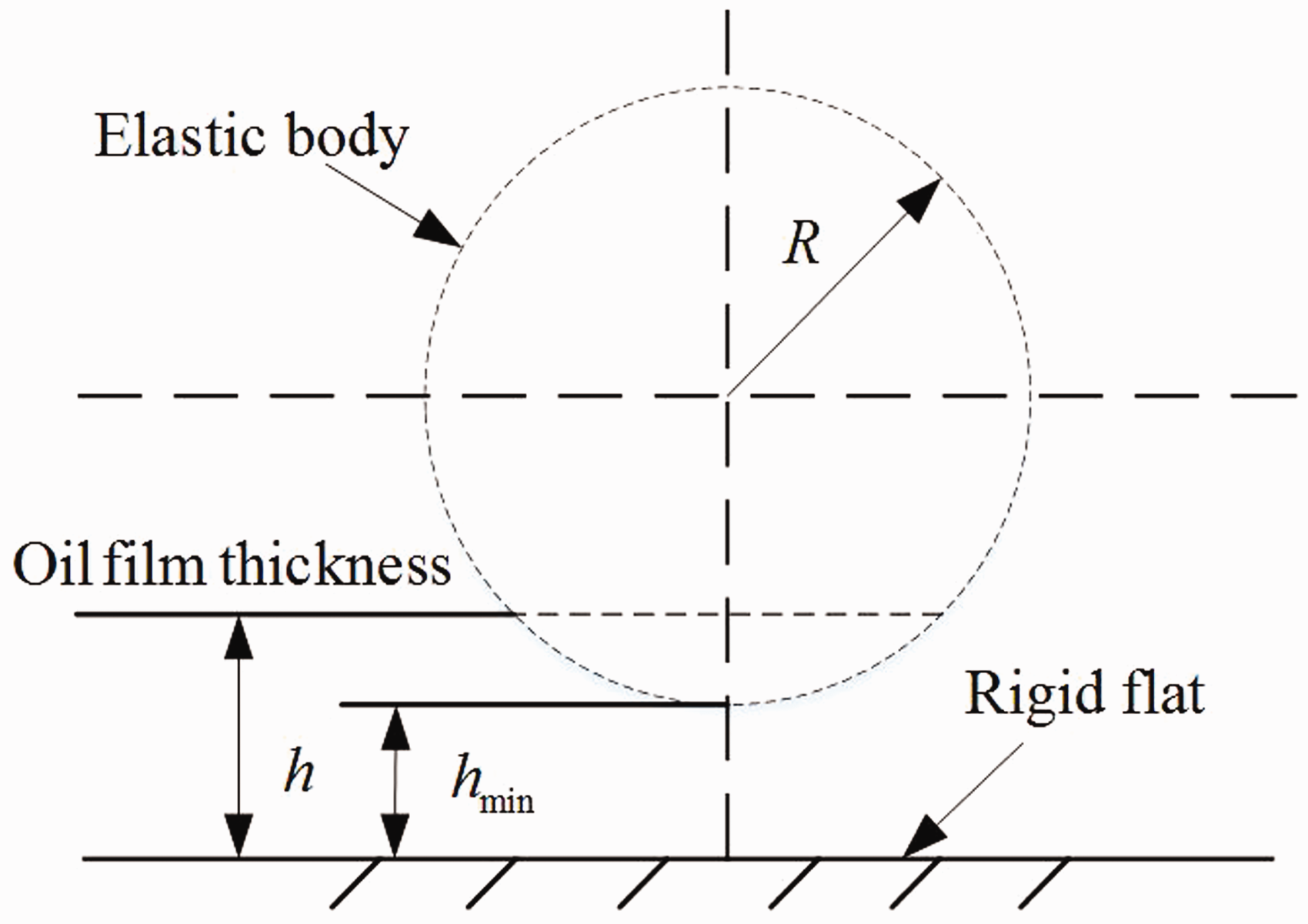
Elastohydrodynamic lubrication (EHL) model of gear pair.
Due to the entrainment effect, there is a squeeze oil film between the contact surfaces of the meshing gear pair. Assuming that the lubricating oil is an incompressible fluid, the basic equation of the squeeze oil film of the gear can be expressed as25,26


The thickness of squeeze oil film can be expressed as

The basic equation (6) of squeeze oil film is derived and the squeezing force of the oil film can be expressed as


The meshing stiffness of the gear pair is obtained by using the Ishikawa formula. The time-varying meshing stiffness is developed by Fourier series with the meshing frequency as the fundamental frequency. In order to facilitate coupling with the oil film stiffness, the meshing stiffness only takes the harmonic fundamental frequency part, which can be expressed as

Since the oil film stiffness is also time-varying, the equivalent stiffness of the system can be obtained by the gear meshing stiffness and oil film stiffness in series when considering the coupling effect of lubrication. In order to illustrate the effect of the squeeze oil film on the stiffness, the stiffness comparison curves of the meshing pairs with and without the squeeze oil film are shown in Figure 4.
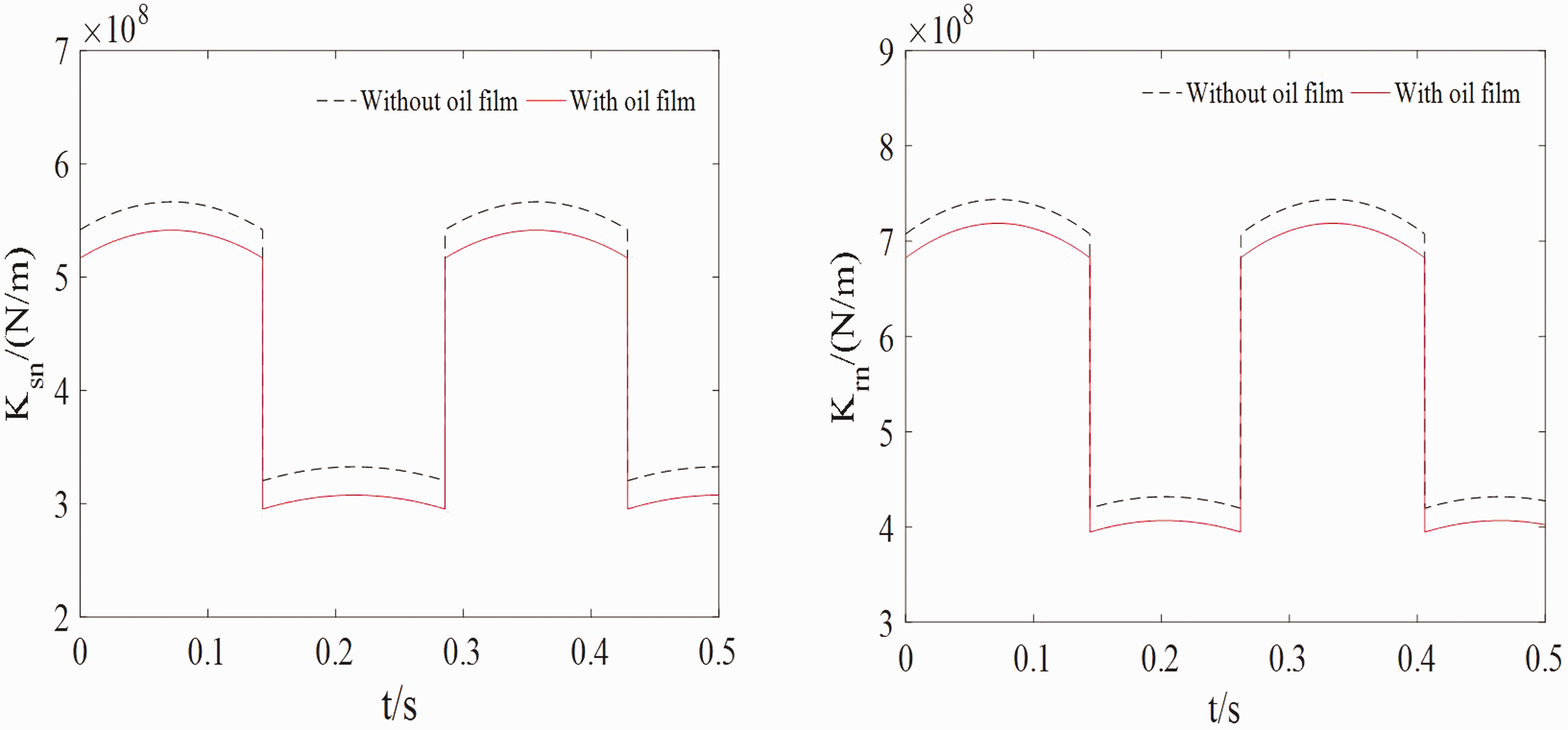
Stiffness comparison curves.
It can be seen from Figure 4 that due to the continuous change of the single and double teeth of the gear, the stiffness of the gear changes periodically, which forms an internal excitation. The stiffness of the double-toothed region is greater than that of the single-toothed region. Compared with the contact time-varying meshing stiffness of the gear pair without oil film, the equivalent stiffness of the internal meshing pair with oil film and the external meshing pair with oil film both decrease, which is consistent with the conclusion of literature. 27
Equivalent damping of meshing gear pairs considering squeeze oil film
In the gear system with coupling effect of lubrication, the system has oil film damping due to the viscous effect of the oil film. When considering the lubrication effect, the damping is treated in the same way as the stiffness and the equivalent damping of the system can be obtained from oil film damping and meshing damping in series, 27 as shown in Figure 5.
Equivalent damping and stiffness models of gear system under lubrication effect.
The equivalent damping of the gear system considering the squeeze oil film can be expressed as

For the nonsteady state problem of pure squeeze lubrication, the Reynold
28
differential equation under isothermal conditions can be simplified as

With

Finally, the expression of oil film damping is obtained by

The meshing damping of the gear pairs can be expressed as
10

The friction force based on mixed EHL
During the gear transmission, the friction coefficient of the tooth surface changes significantly with the speed, load distribution, and tooth surface profile. Martin 29 found that the state of gear lubrication is constantly changing between full oil film EHL and boundary lubrication. In fact, the lubrication form of the gear meshing pairs is mixed EHL, which is composed of full oil film EHL and boundary lubrication.
The mixed EHL friction force of the meshing pair can be introduced as


In order to obtain the friction force of mixed EHL, the friction coefficient of EHL needs to be determined. The friction coefficient of mixed EHL is related to the load distribution percentage function

In the mixed lubrication state, the tooth surface contact load

The mixed friction coefficient can be expressed as

According to the full oil film EHL friction coefficient is

Finally, the friction coefficient of mixed EHL can be introduced as

Under boundary lubrication condition, the friction coefficient is basically constant. The boundary lubrication friction coefficient measured through experiments is generally 0.1–0.2.
29
According to the full oil film EHL model,
35
the full oil film EHL coefficient can be expressed as

In order to explain the influence of tooth surface friction on the dynamic engagement force of the meshing gear pair, the dynamic engagement force comparison curves of meshing gear pairs with and without friction are shown in Figure 6.
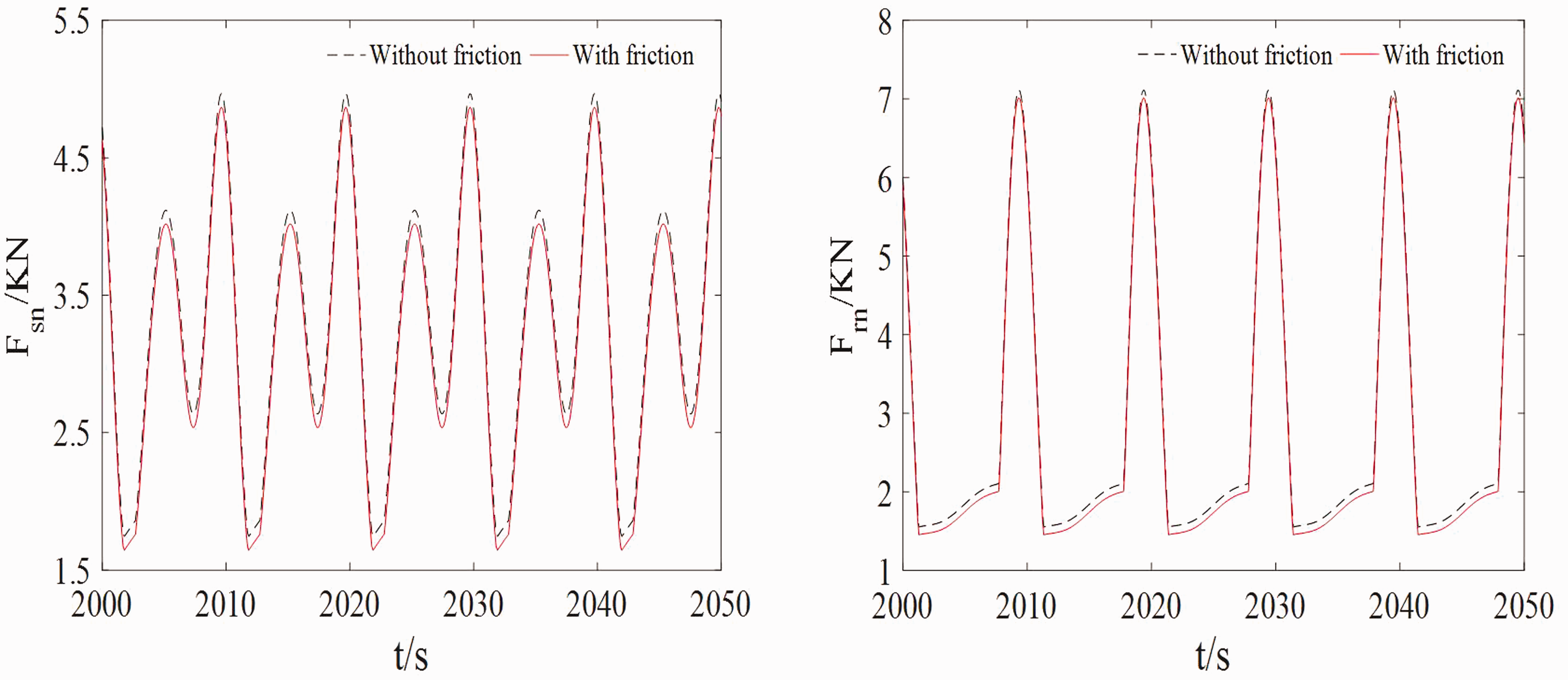
Comparison curves of dynamic engagement force.
It can be seen from Figure 6 that compared with the dynamic engagement force of gear pair without friction, the system’s dynamic engagement force of the external gear pair with friction and the internal gear pair with friction both decrease, which indicates that the tooth surface friction suppresses the engagement force of the system.
Friction arm of internal and external meshing gear pairs
As shown in Figure 7, in the schematic diagram of the external meshing gear pair,

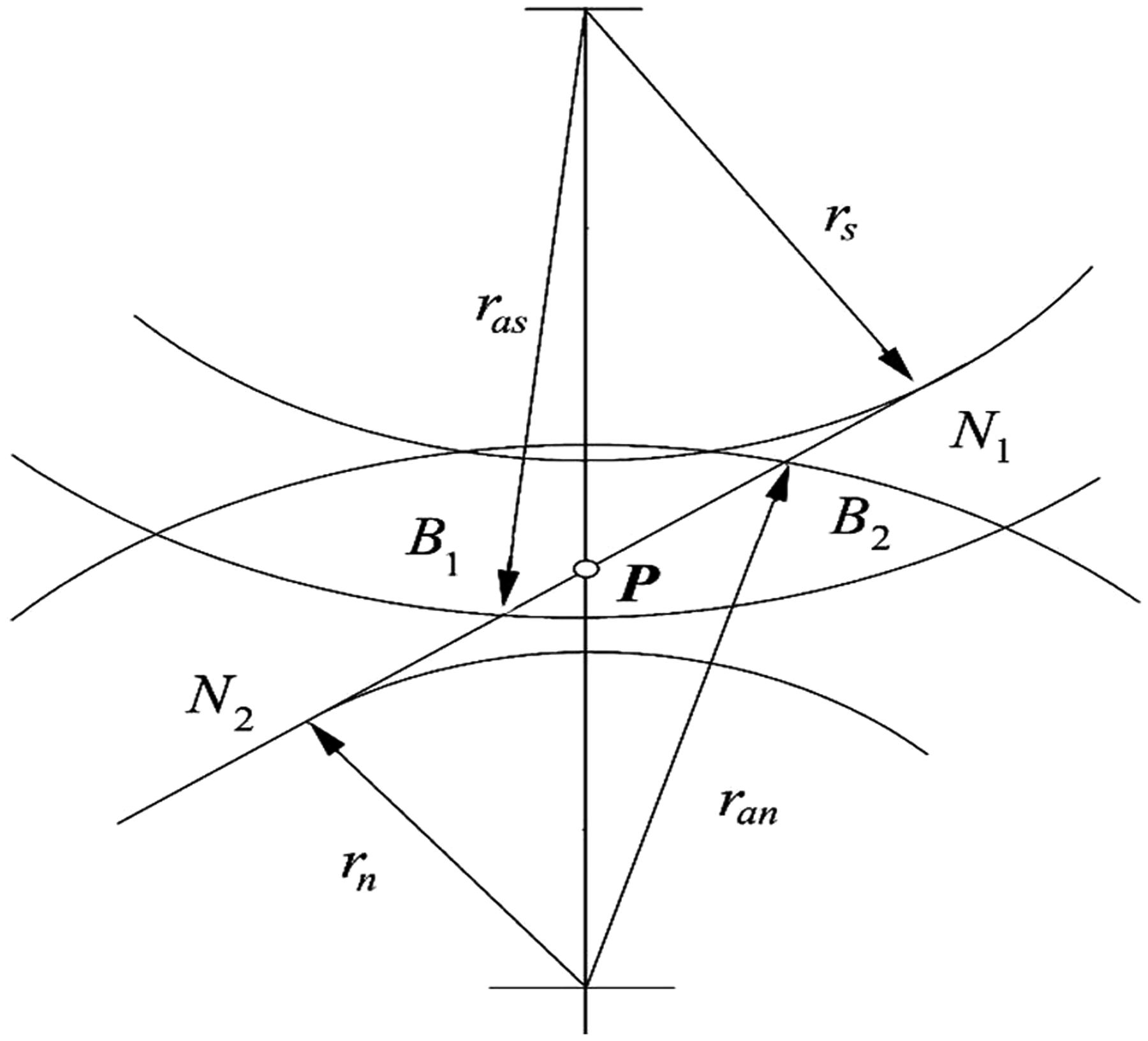
Schematic diagram of the external meshing gear pair.
Similarly, the friction arm of the internal meshing gear pair can be expressed as

Dimensionless equations of the system
Due to the existence of gear backlash, the system constraints are incomplete. Equation (1) is a semi-positive definite system with rigid body displacement and indefinite solutions. In order to eliminate rigid body displacements and reduce the number of system equations to achieve dimensionality reduction, the relative displacements of the internal and external meshing pairs were introduced by

It should be pointed out that the introduced new coordinates are essentially obtained through bicontinuous mapping, which means that they have the same bifurcation characteristics. The coordinate transformation not only makes the system deterministic but also has intuitive physical meaning, especially in the research field of gear vibration and shock. With the effect of coordinate transformation and equation recombination, equation (1) can be rewritten as
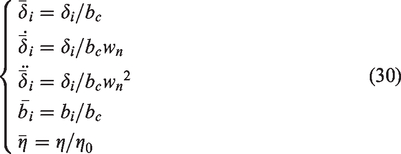
The dimensionless comparison analysis can be performed on the results at different dimension scales by introducing the dimensionless time variable
Introducing the nominal displacement scale
The dimensionless backlash function of the system can be expressed as

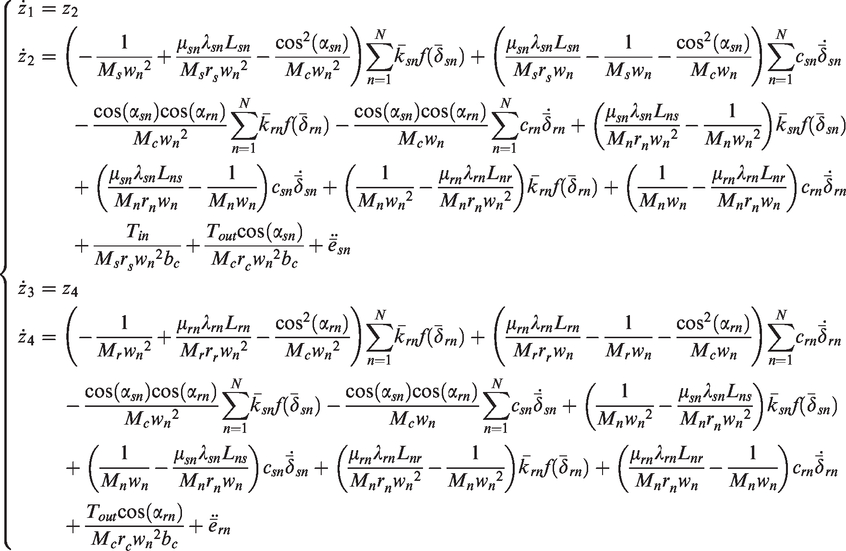
In order to facilitate the use of the variable-step Runge–Kutta numerical method, equation (28) in the form of the matrix vector can be expressed as

Let
Numerical simulation and result analysis
The fourth to fifth order Runge–Kutta numerical method is used to solve the dynamic differential equation. In order to eliminate the transient response of the system, the first hundreds of cycles are omitted. Because the vibration characteristics of the internal and external meshing pairs are consistent, the relative displacement of the external meshing pair
Basic parameters of planetary gear system.
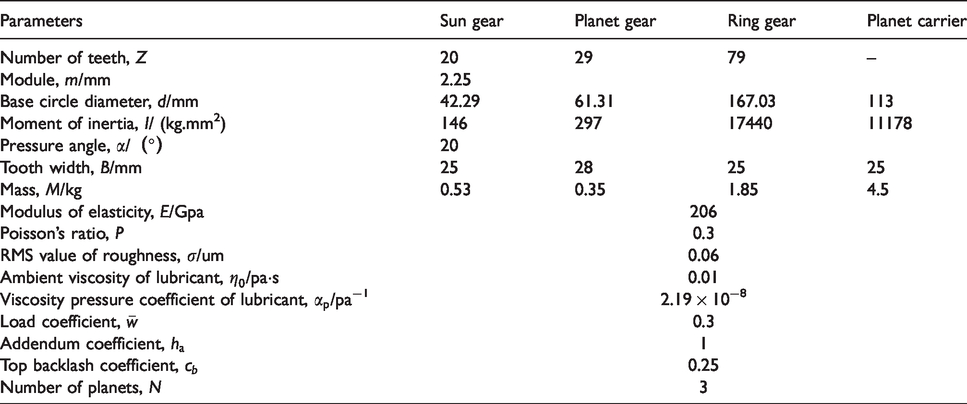
For the gear system that considering the squeeze oil film, it can be seen from the basic equations (6)–(8) of the squeeze oil film that the parameters, such as excitation frequency, viscosity, and gear backlash, are related to the oil film thickness, then the oil film thickness will affect the oil film stiffness and oil film damping, which will affect the system’s dynamic response. In order to study the effect of squeeze oil film on the system, it is necessary to analyze the dynamic characteristics of the system from the perspective of excitation frequency, lubricant viscosity, and backlash.
To further clarify the effect of squeeze oil film on the dynamic response of the system, the time–domain curves of dimensionless relative vibration displacement of internal and external meshing gear pairs are obtained without and with the effect of squeeze oil film, as shown in Figure 8.
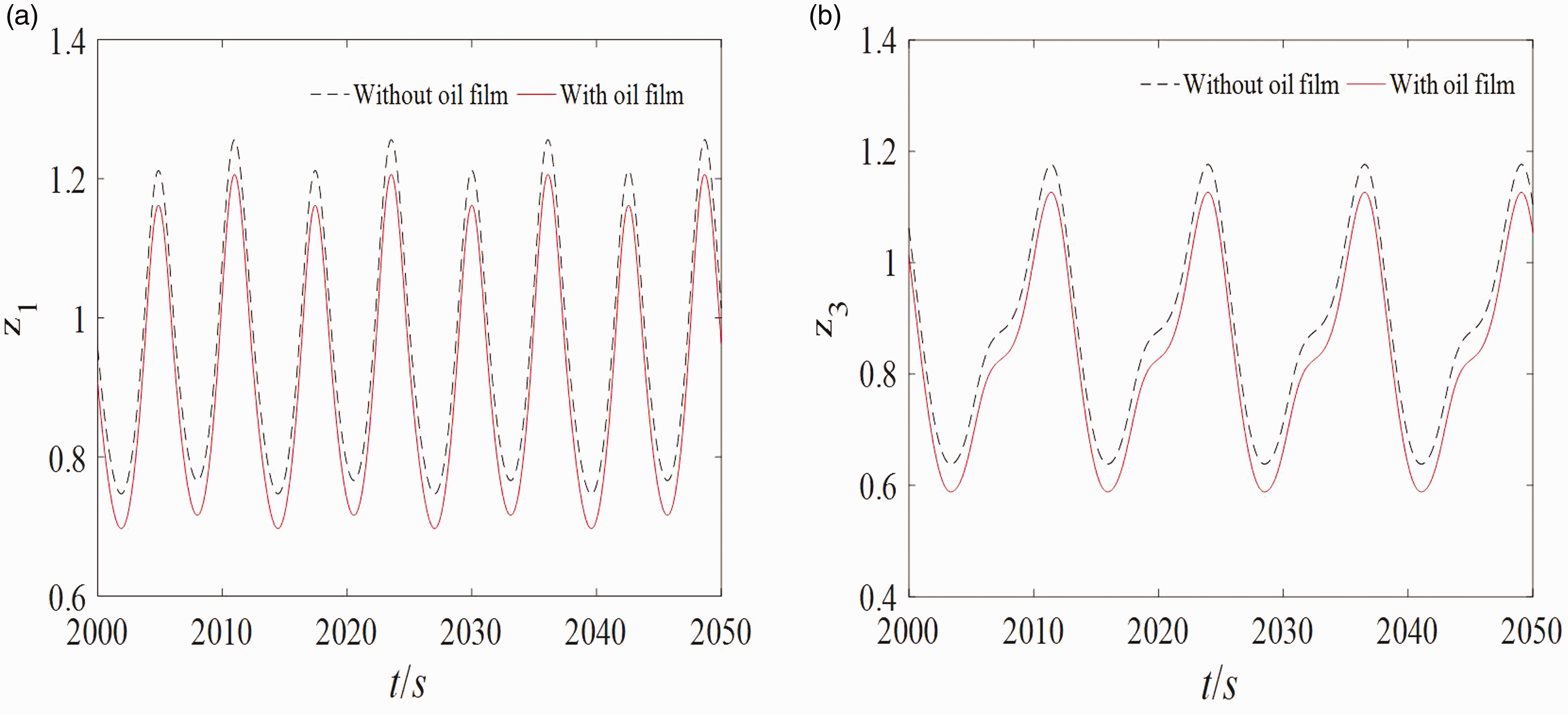
Time–domain comparison curve of dimensionless relative vibration displacement.
It can be seen from Figure 8 that when the oil film is not considered, the dimensionless relative vibration displacement of the external gear pair changes in the range of [0.747, 1.256], and the dimensionless relative vibration displacement of the internal gear pair changes in the range of [0.638, 1.176]. When the oil film is considered, the dimensionless relative vibration displacement of the external gear pair changes in the range of [0.697, 1.206], and the dimensionless relative vibration displacement of the internal gear pair changes in the range of [0.593, 1.102]. After considering the effect of the oil film, the dimensionless relative vibration displacement amplitude and fluctuation range of the internal and external meshing gear pairs decrease, which is consistent with the conclusion in the literatures.37,38 Through the above analysis, the correctness of the model and simulation results can be verified, and it also provides support for the nonlinear analysis later.
Nonlinear dynamics characteristic of the system with excitation frequency
The dimensionless gear backlash
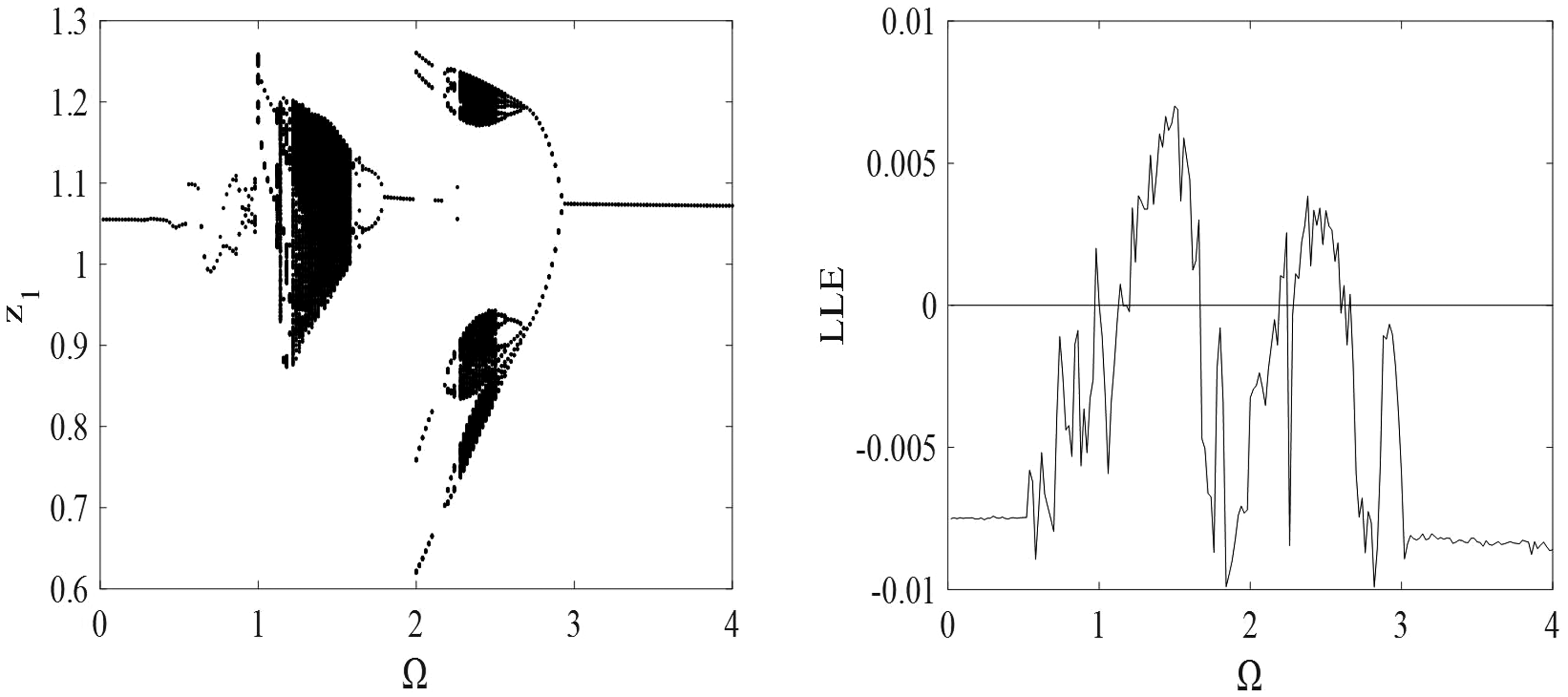
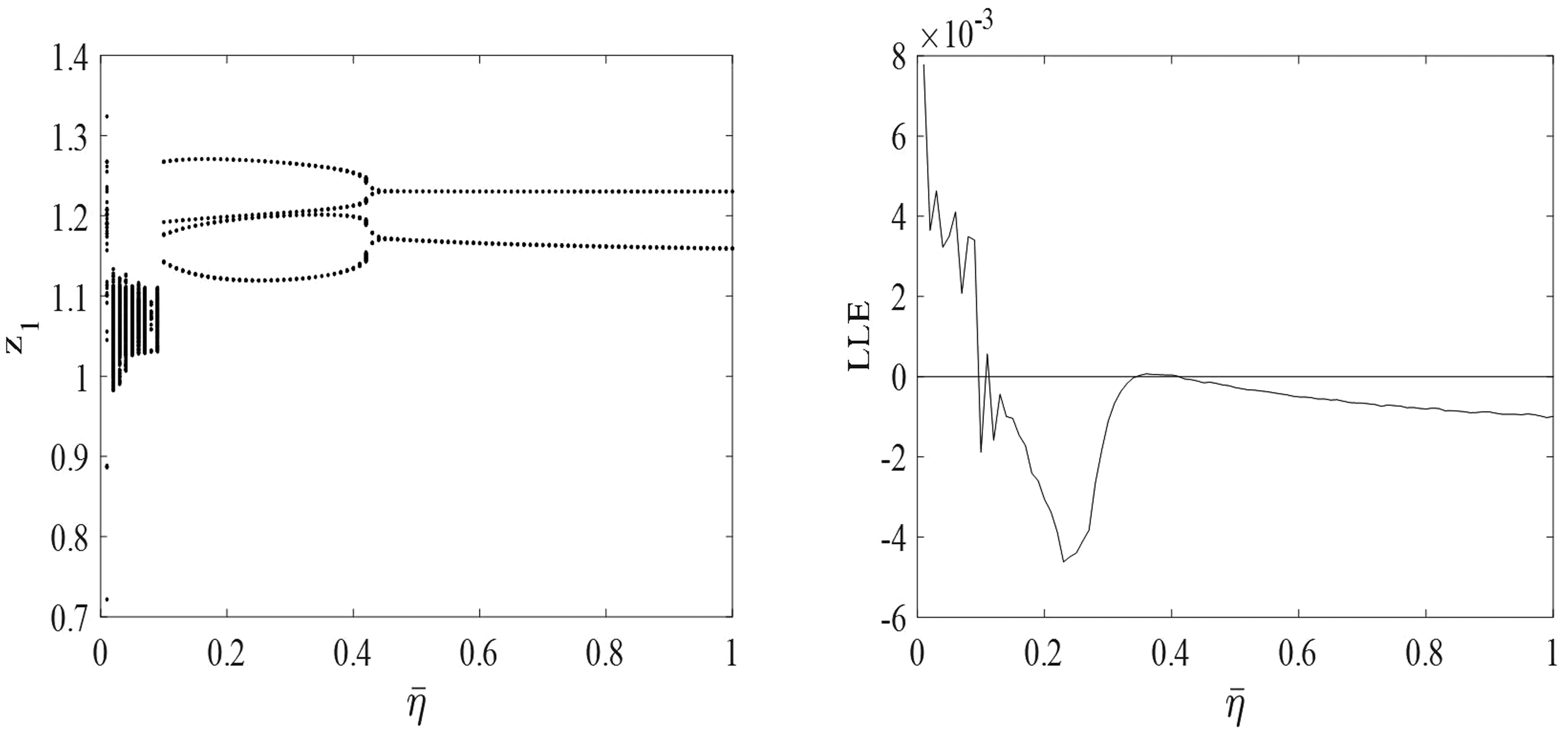
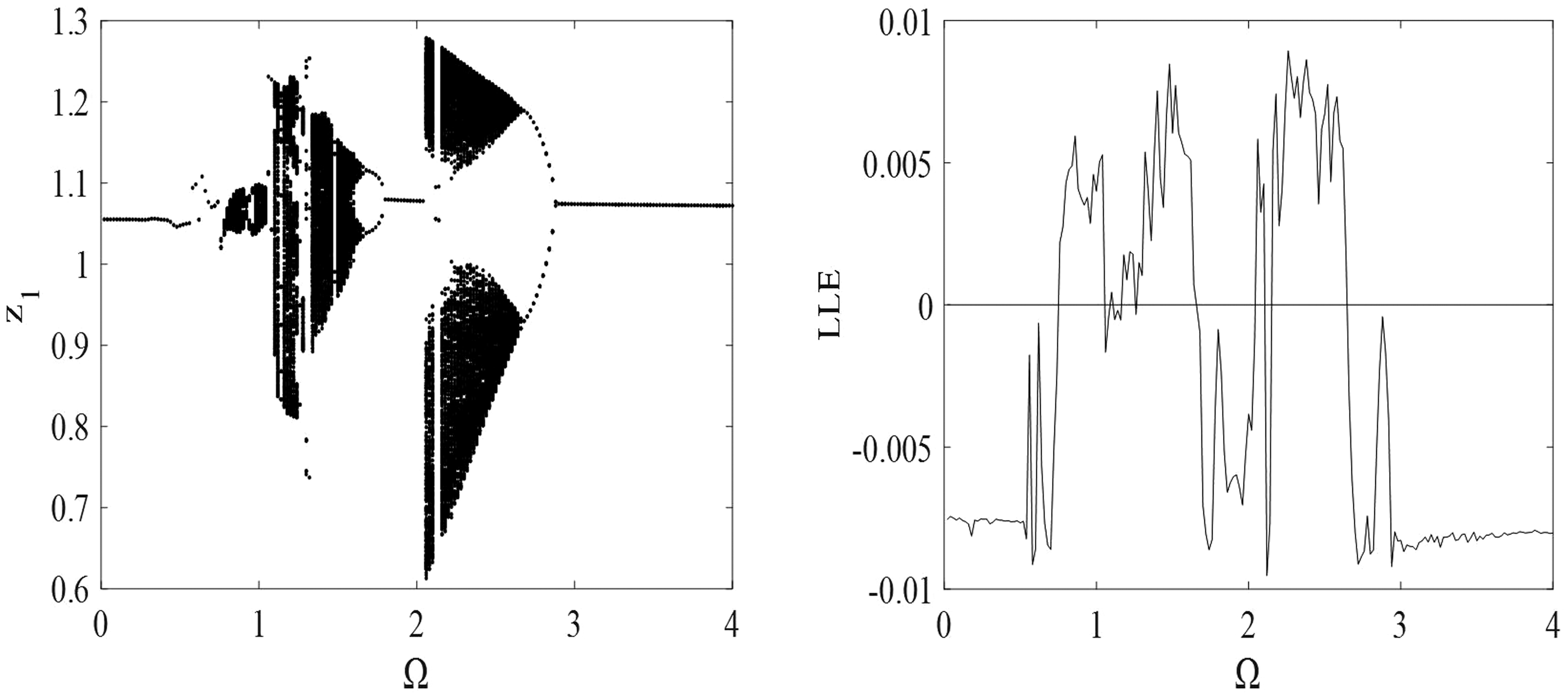
Bifurcation diagram and LLE of the system with
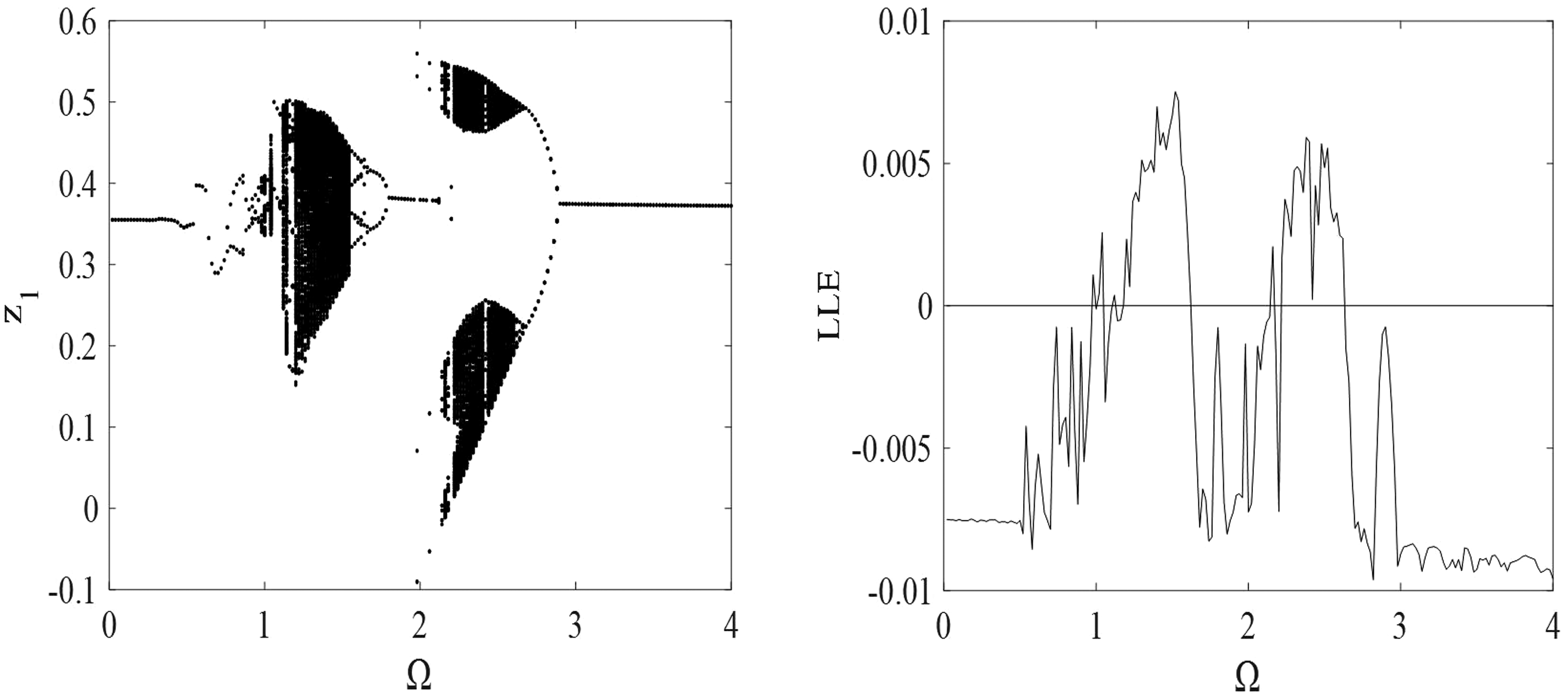
It can be seen from Figure 9 that when dimensionless excitation frequency
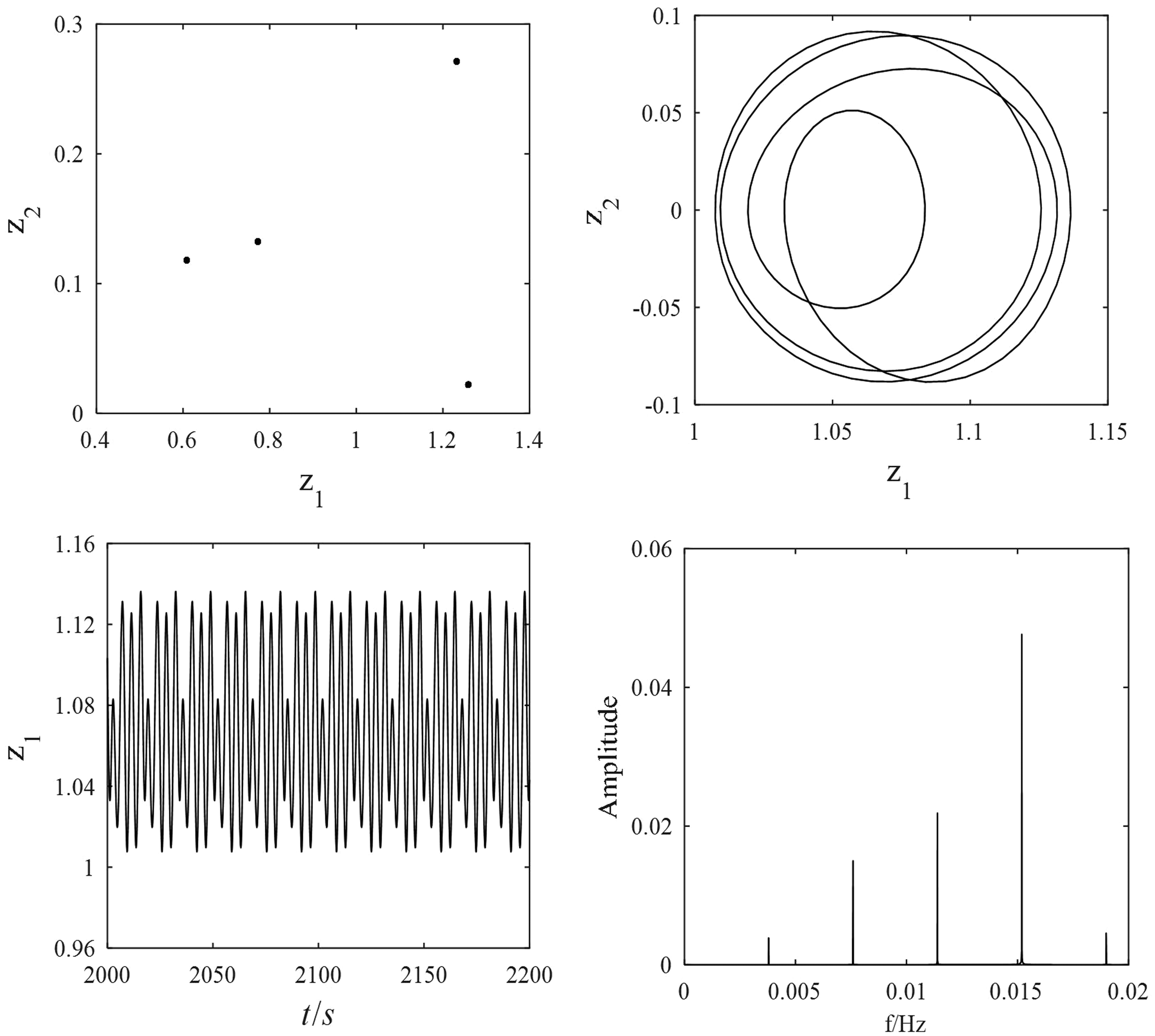
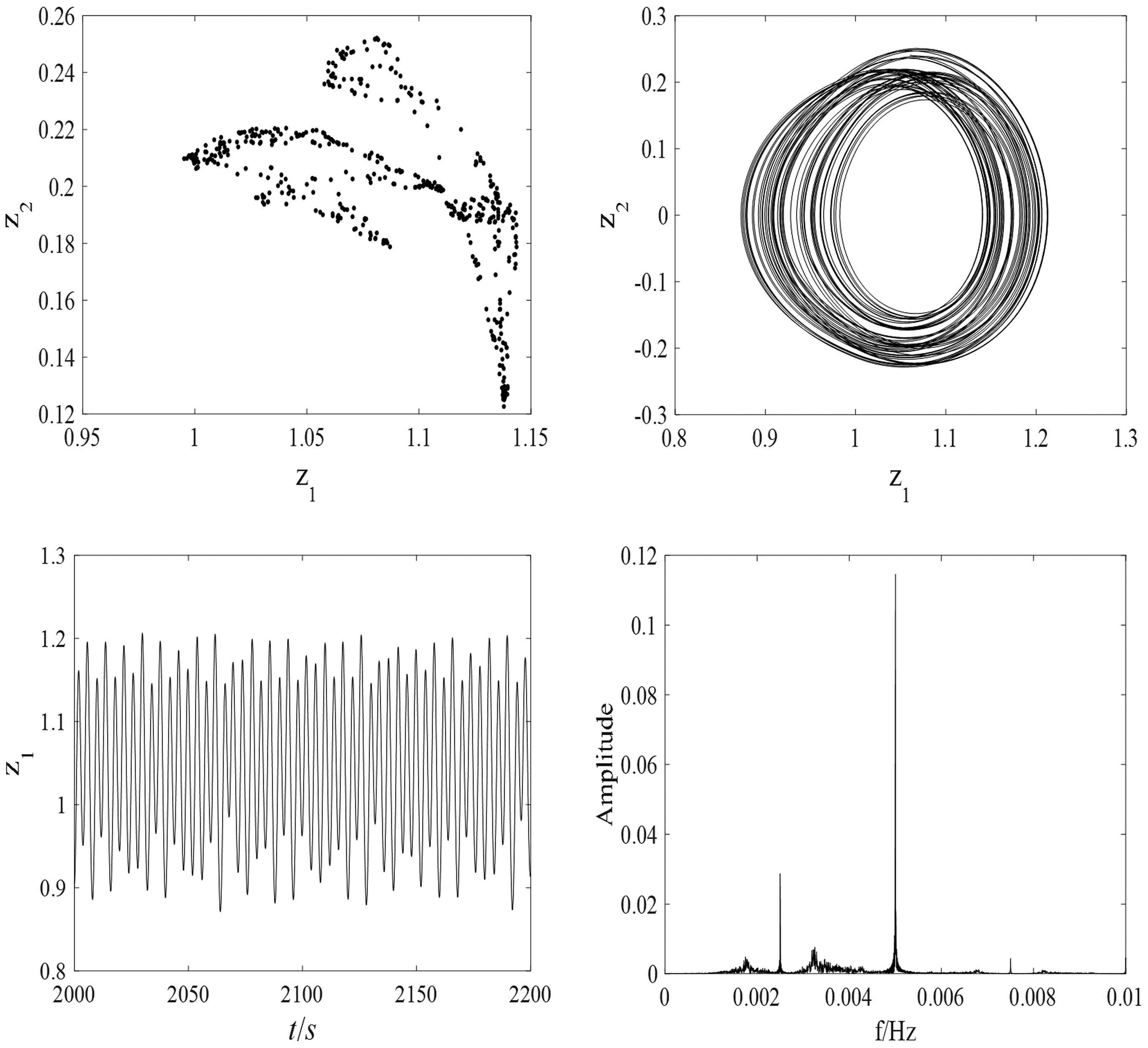
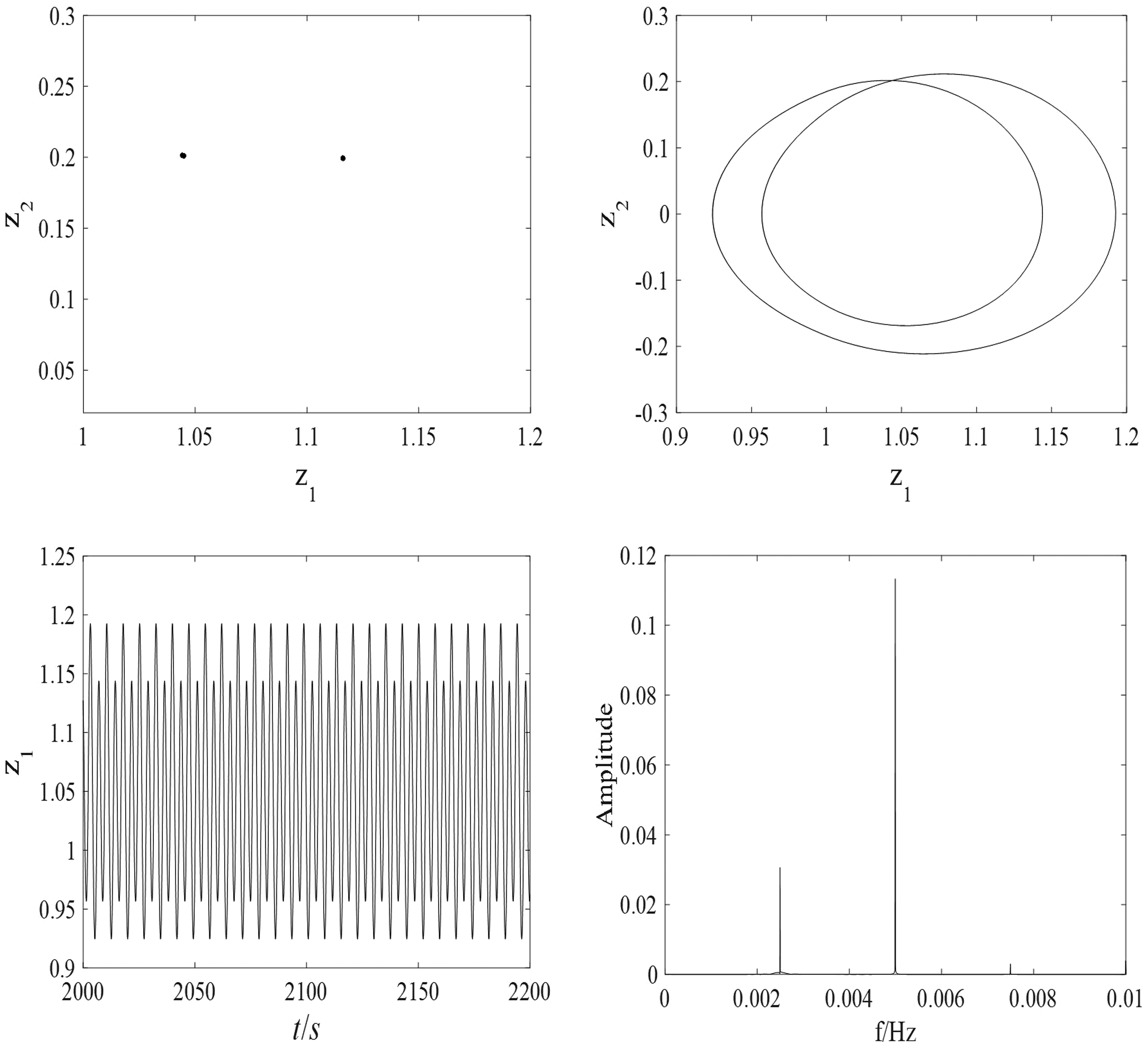
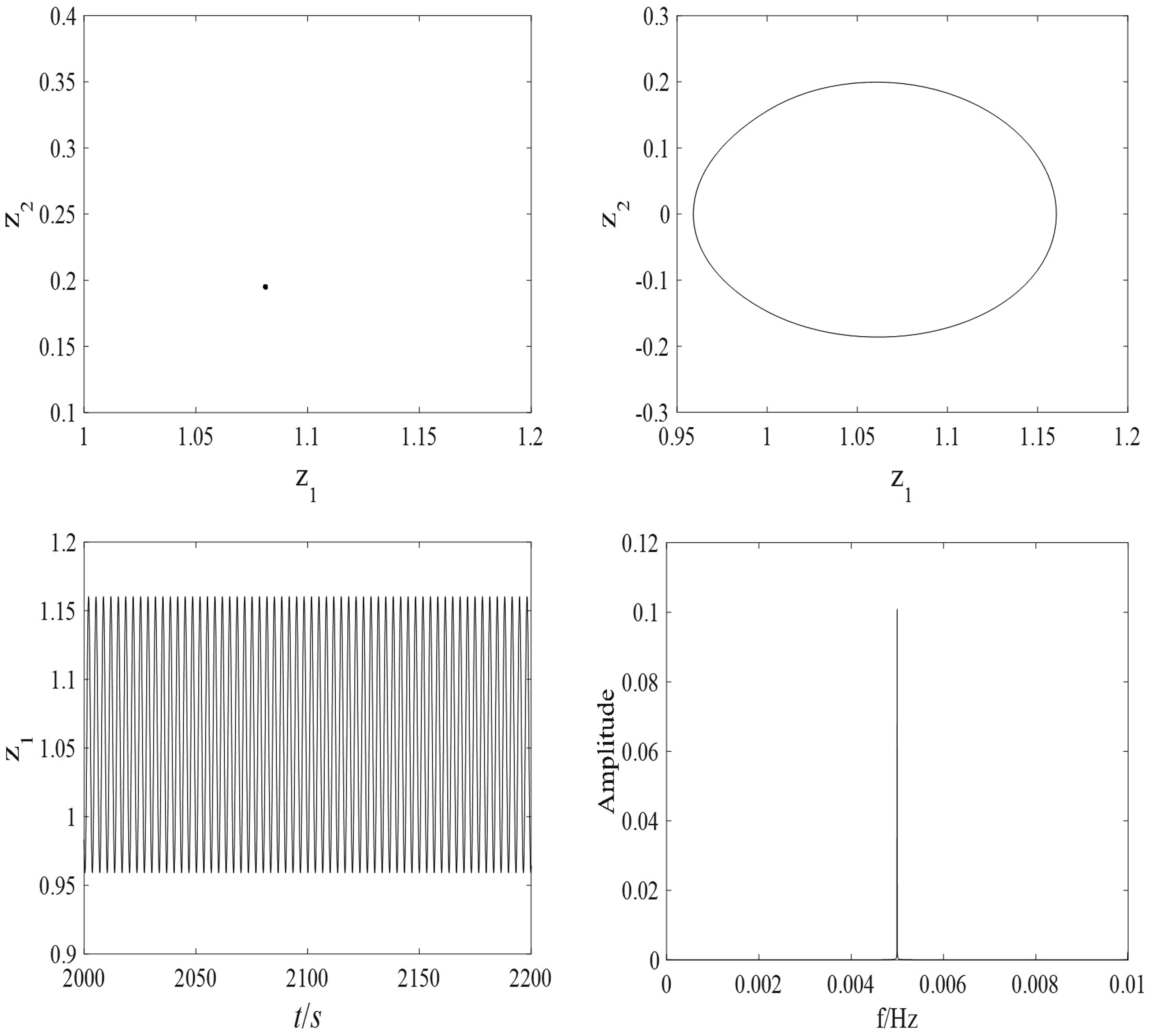
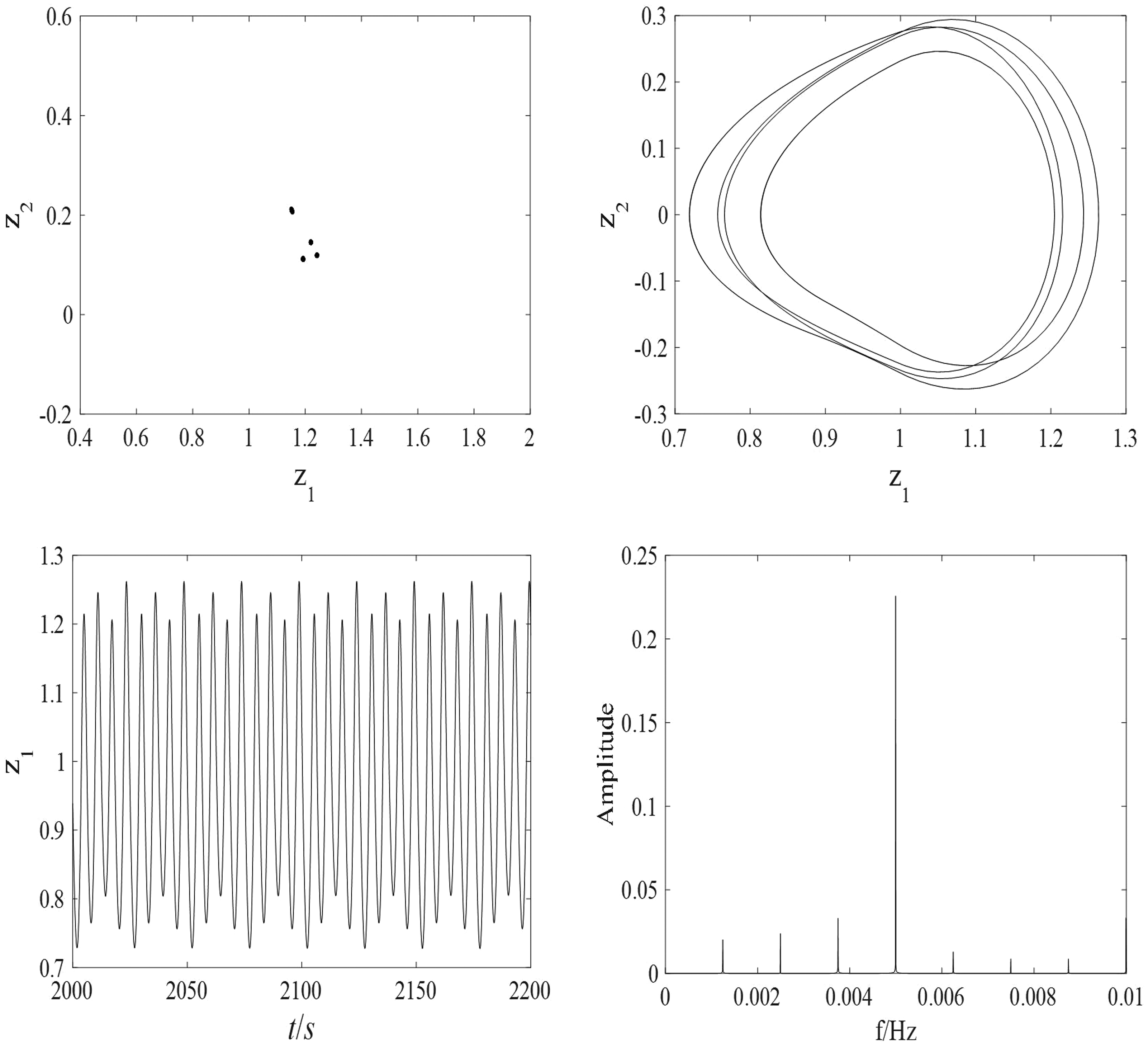
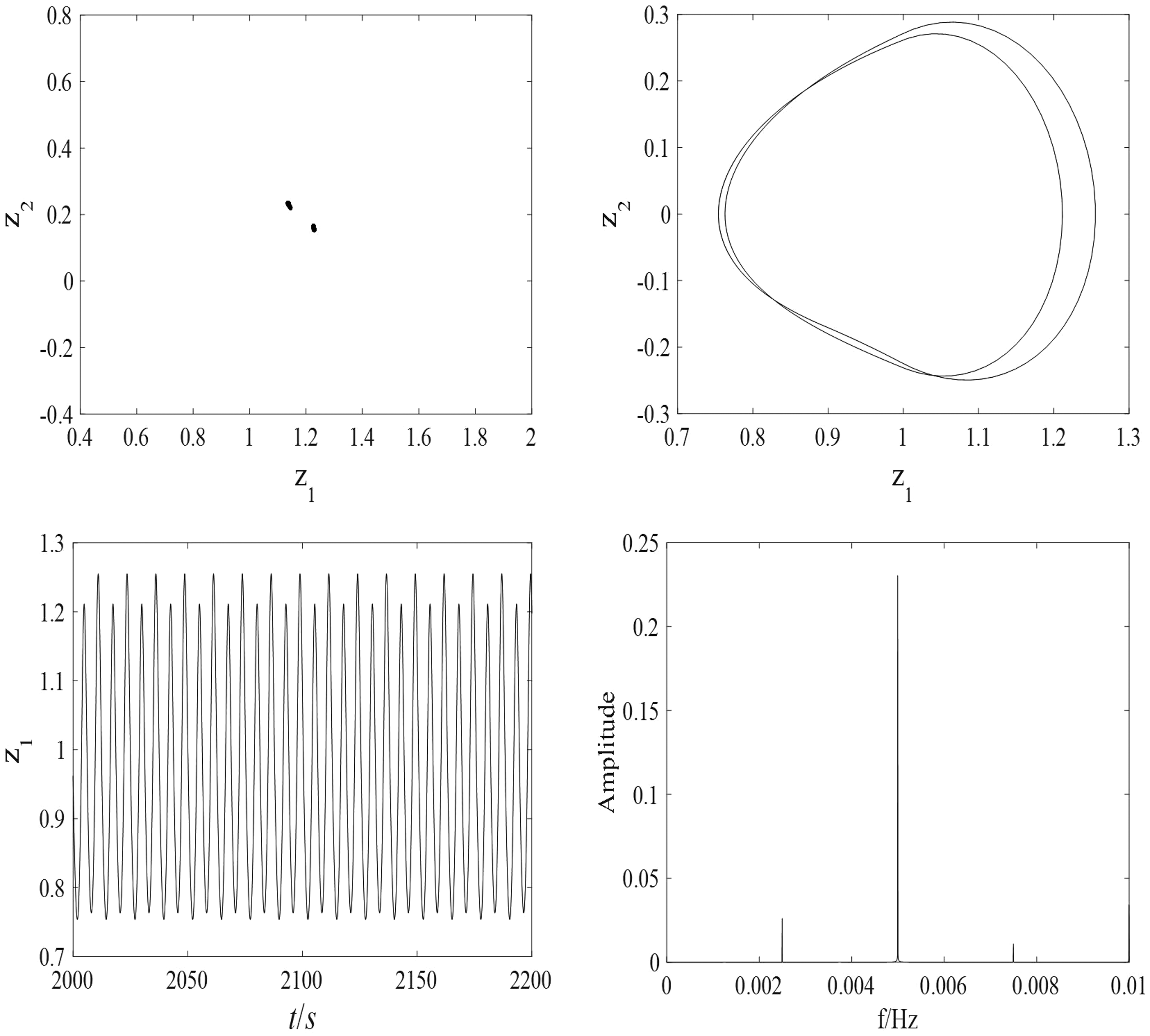
In order to track the process and evolution of the system’s motion with the dimensionless excitation frequency
With the increase of the dimensionless excitation frequency
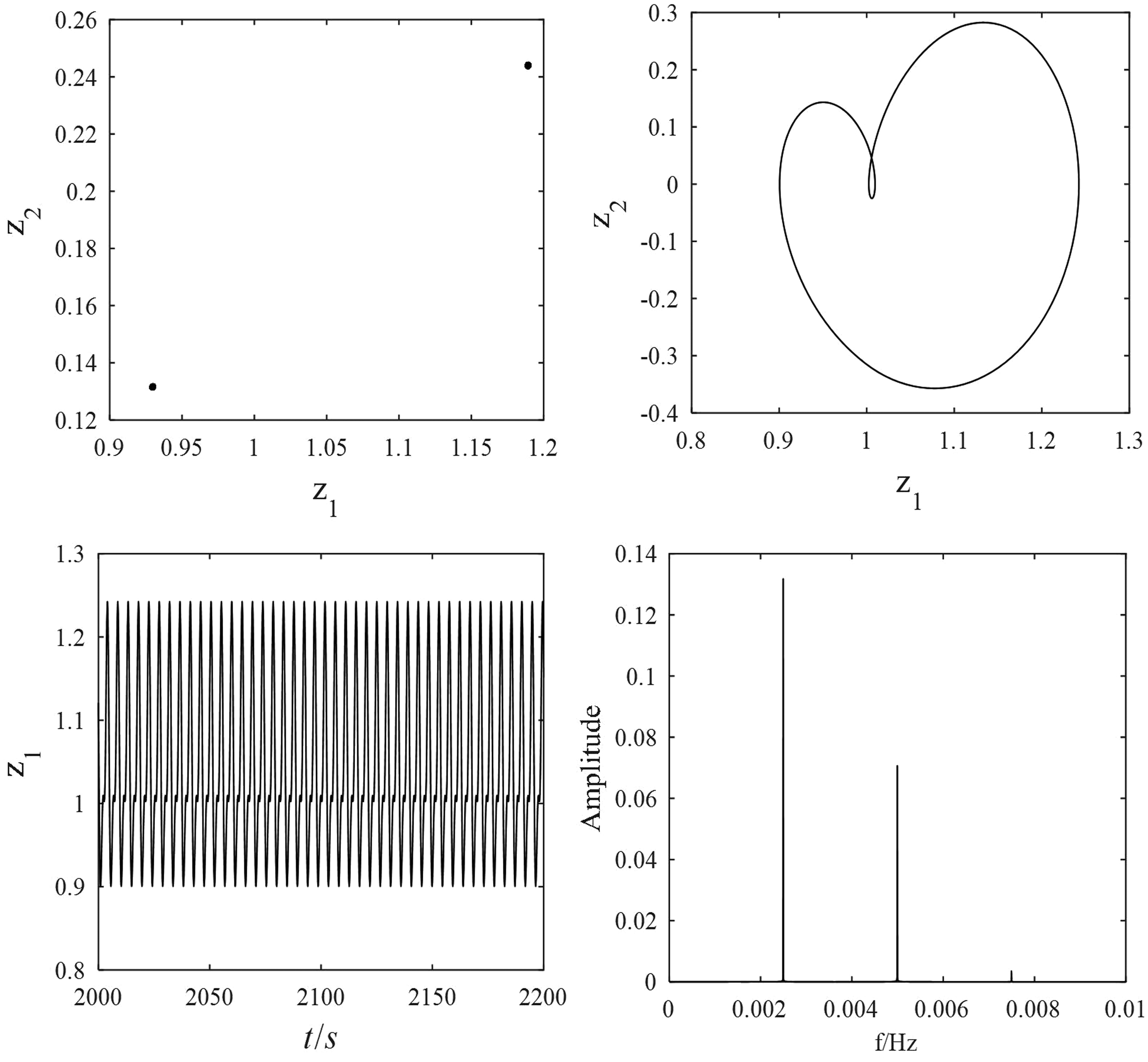
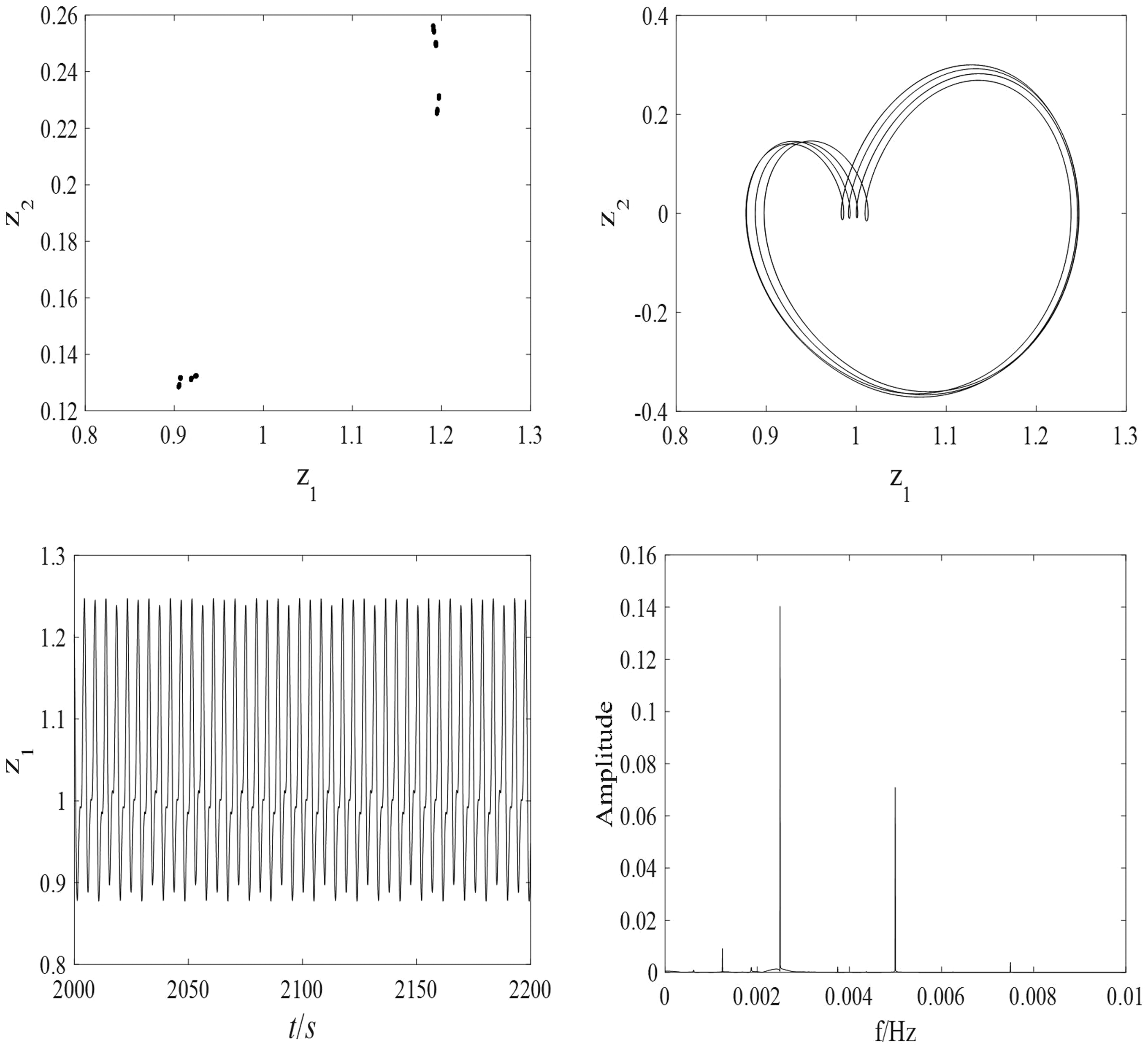
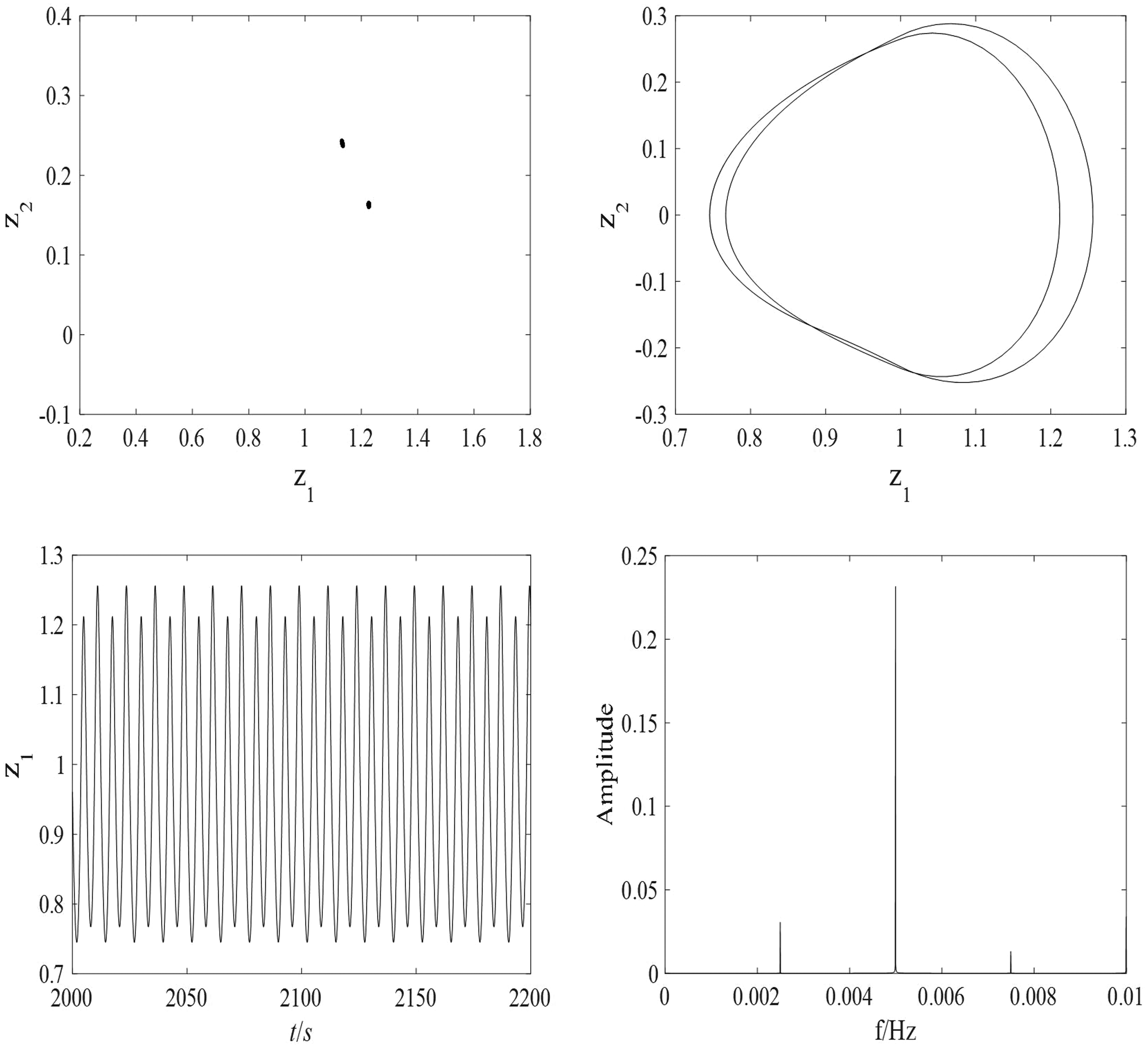
Poincaré map, phase diagram, time history, and FFT spectrum of the system when
Poincaré map, phase diagram, time history, and FFT spectrum of the system when
When
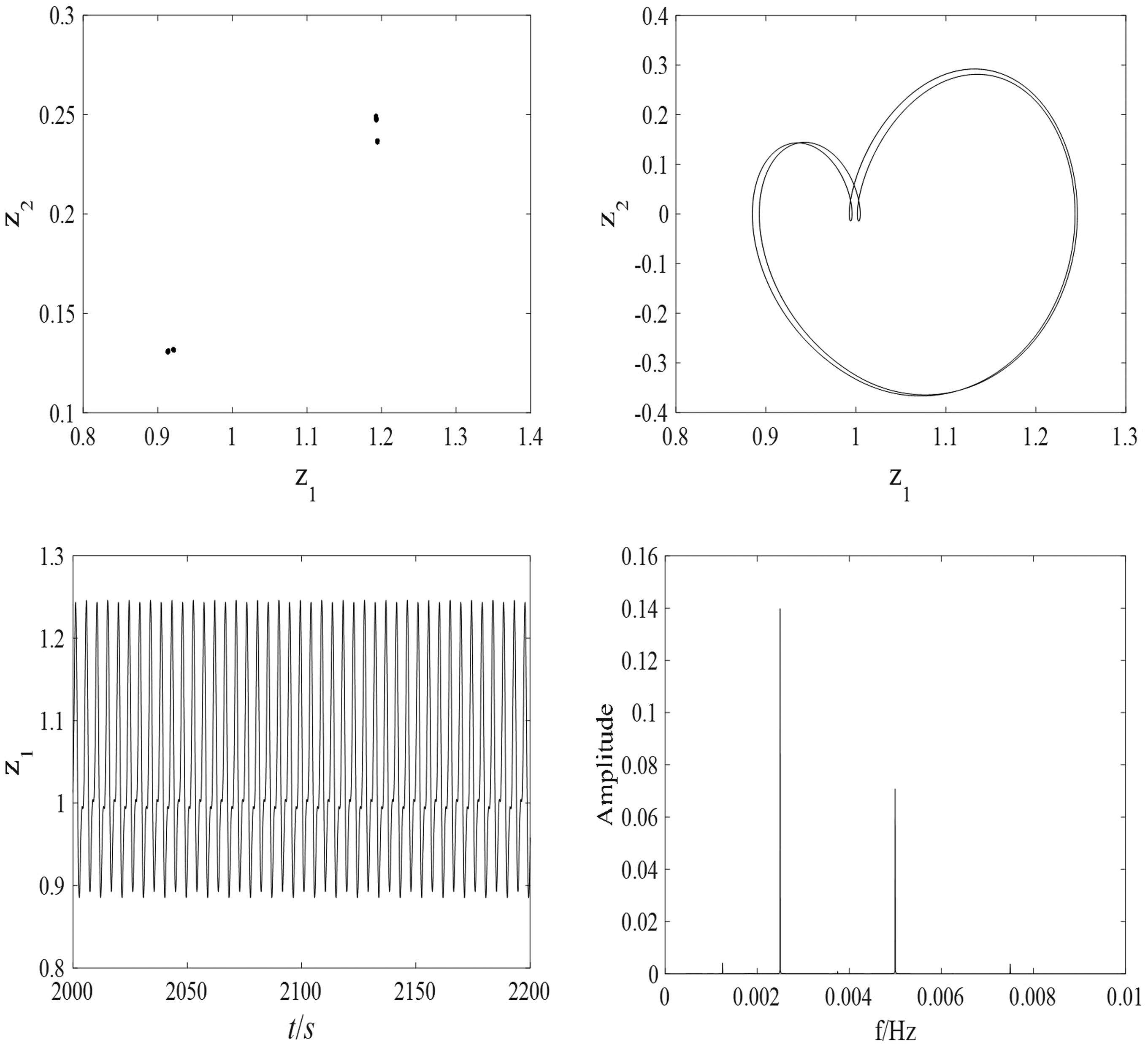
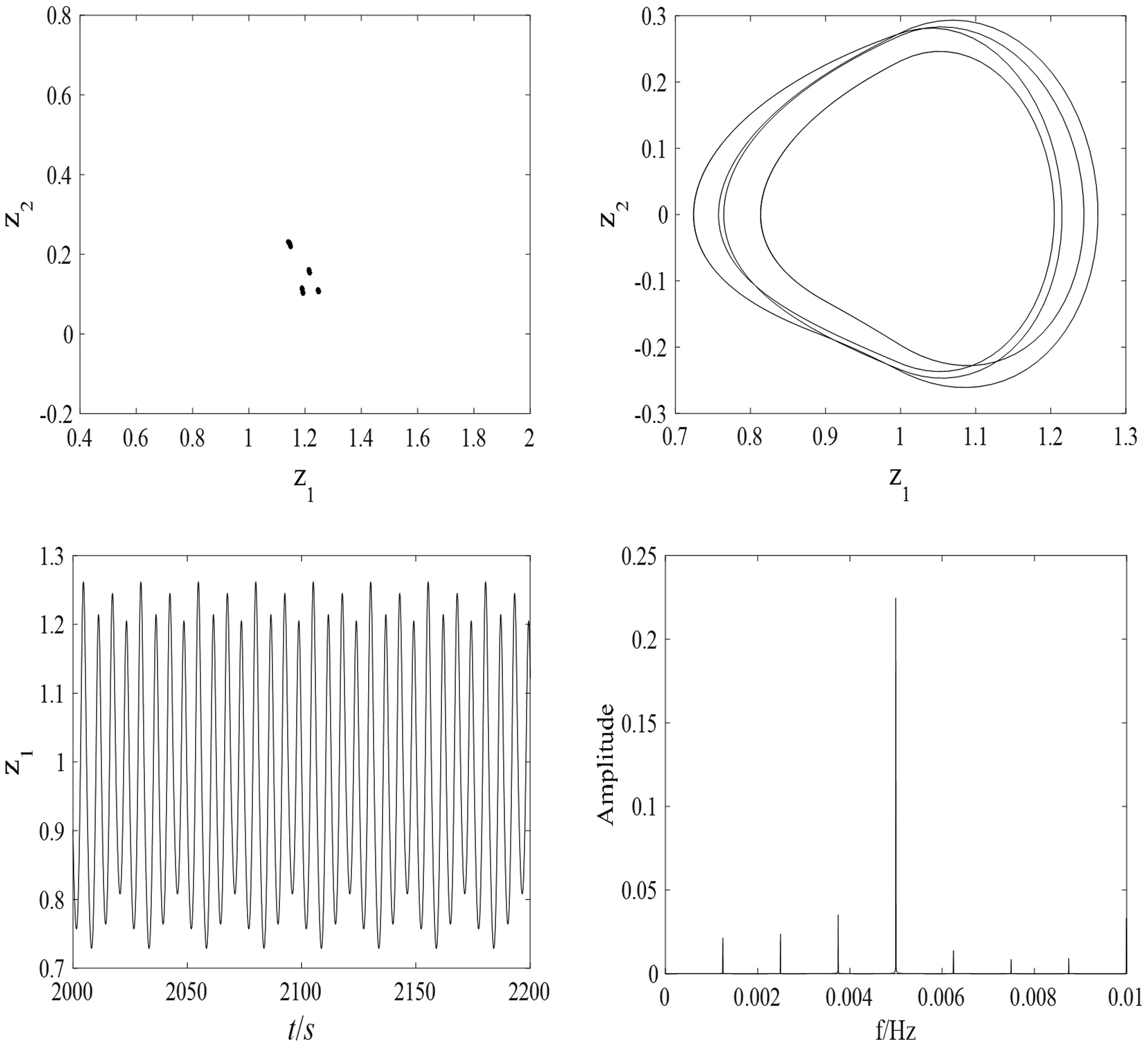
Poincaré map, phase diagram, time history, and FFT spectrum of the system when
Poincaré map, phase diagram, time history, and FFT spectrum of the system when
Poincaré map, phase diagram, time history, and FFT spectrum of the system when
When
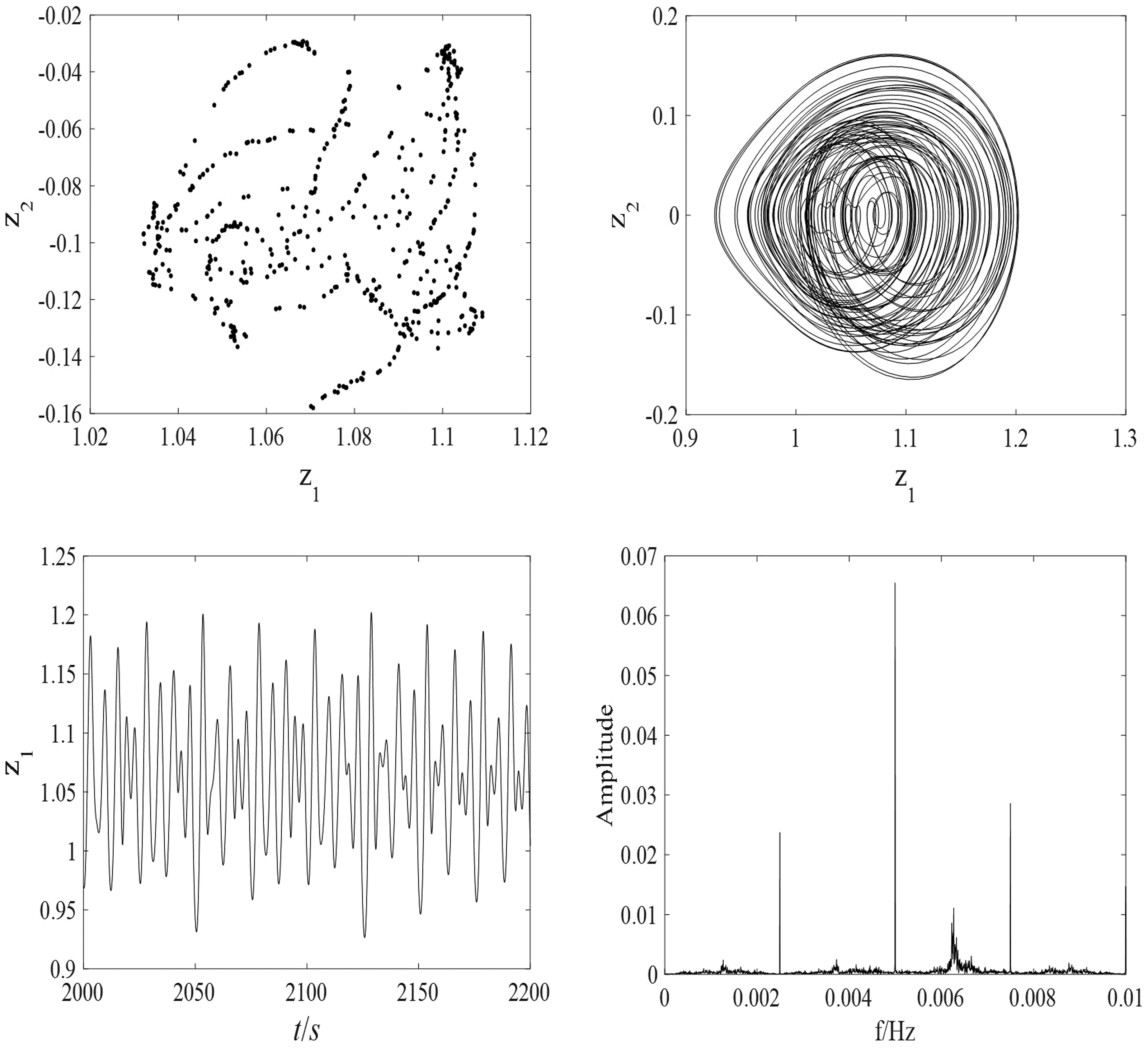
Poincaré map, phase diagram, time history, and FFT spectrum of the system when
Poincaré map, phase diagram, time history, and FFT spectrum of the system when
In engineering practice, the excitation frequency corresponds to the speed of the system. In order to make the gear system have better stability and reliability, and extend the operating cycle life of the system, the speed range corresponding to chaotic motion and the critical speed (the point of bifurcation) that changes the state of the system must be avoided.
Nonlinear dynamics characteristics of the system with lubricant viscosity
The increase of lubricant viscosity will cause changes in friction coefficient, oil film damping, and oil film stiffness, which will affect the dynamic characteristics of the system. It is necessary to analyze the effect of lubricant viscosity on the system. The dimensionless excitation frequency
Bifurcation diagram and LLE of the system with
It can be seen from Figure 17 that when the lubricant viscosity
As the previous chapter has described in detail the motion characteristics of the Poincaré map, phase diagram, time history, and FFT spectrum of the system under different motion states, it will not be repeated later. Response of the system: chaotic motion
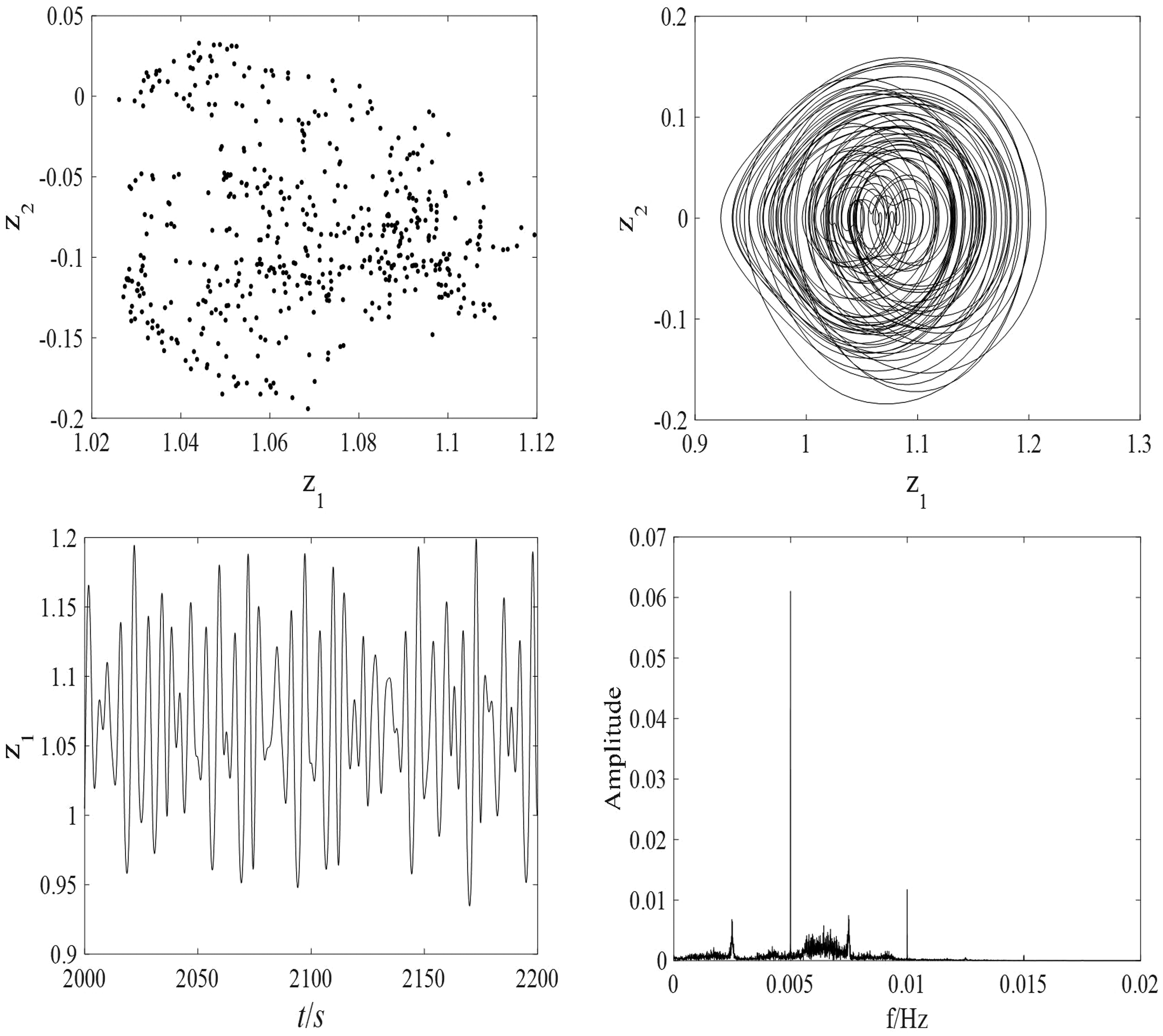
Poincaré map, phase diagram, time history, and FFT spectrum of the system when
Poincaré map, phase diagram, time history, and FFT spectrum of the system when
Poincaré map, phase diagram, time history, and FFT spectrum of the system when
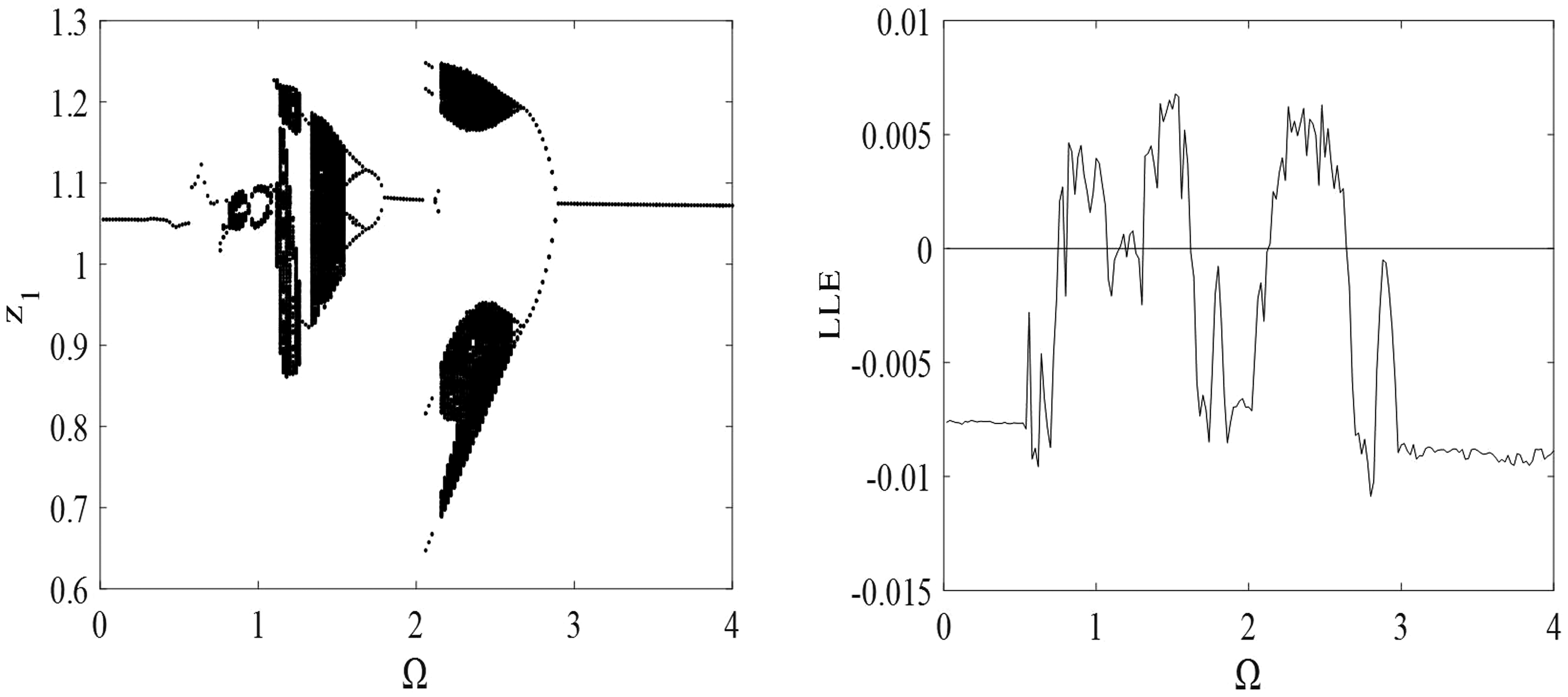
In order to further explain the influence of the lubricant viscosity
Bifurcation diagram and LLE of the system with
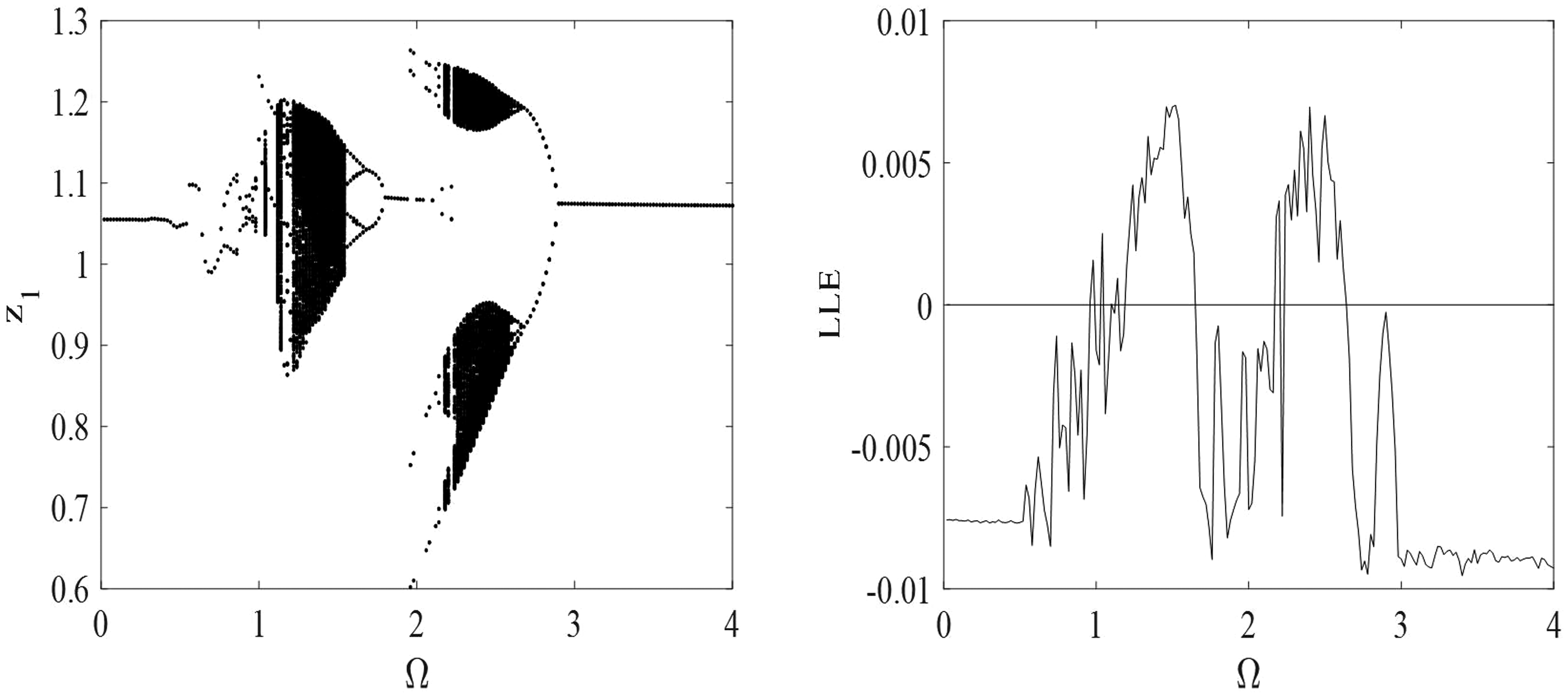
Bifurcation diagram and LLE of the system with
Nonlinear dynamics characteristic of the system with gear backlash
In order to further analyze the effect of backlash on the system in detail, the backlash is refined into the backlash of the internal meshing pair and the backlash of the external meshing pair. The external meshing gear backlash is defined as the sun–planet backlash
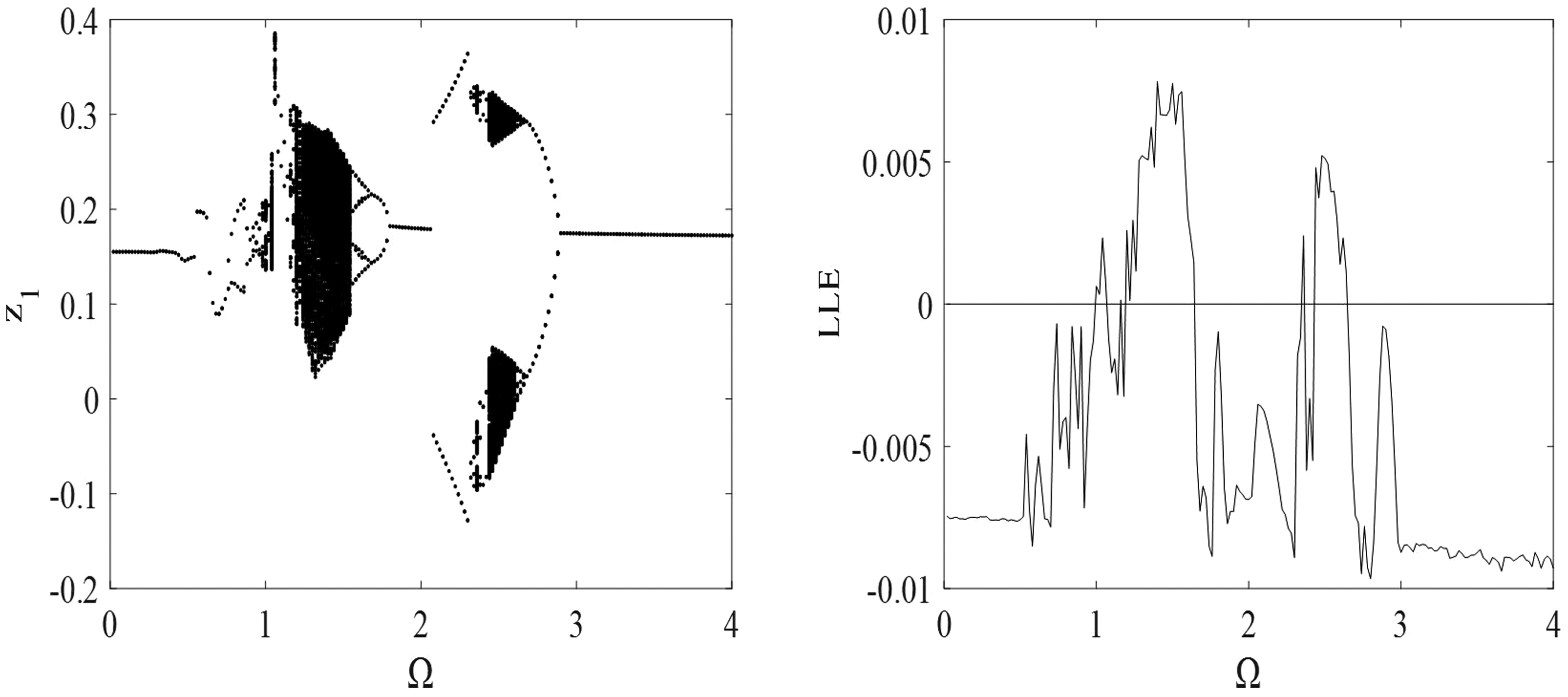
Bifurcation diagram and LLE of the system with
It can be seen from Figure 23 that when the dimensionless sun–planet backlash
When
The Poincaré map, phase diagram, time history, and FFT spectrum are used to illustrate the system’s motion state. When
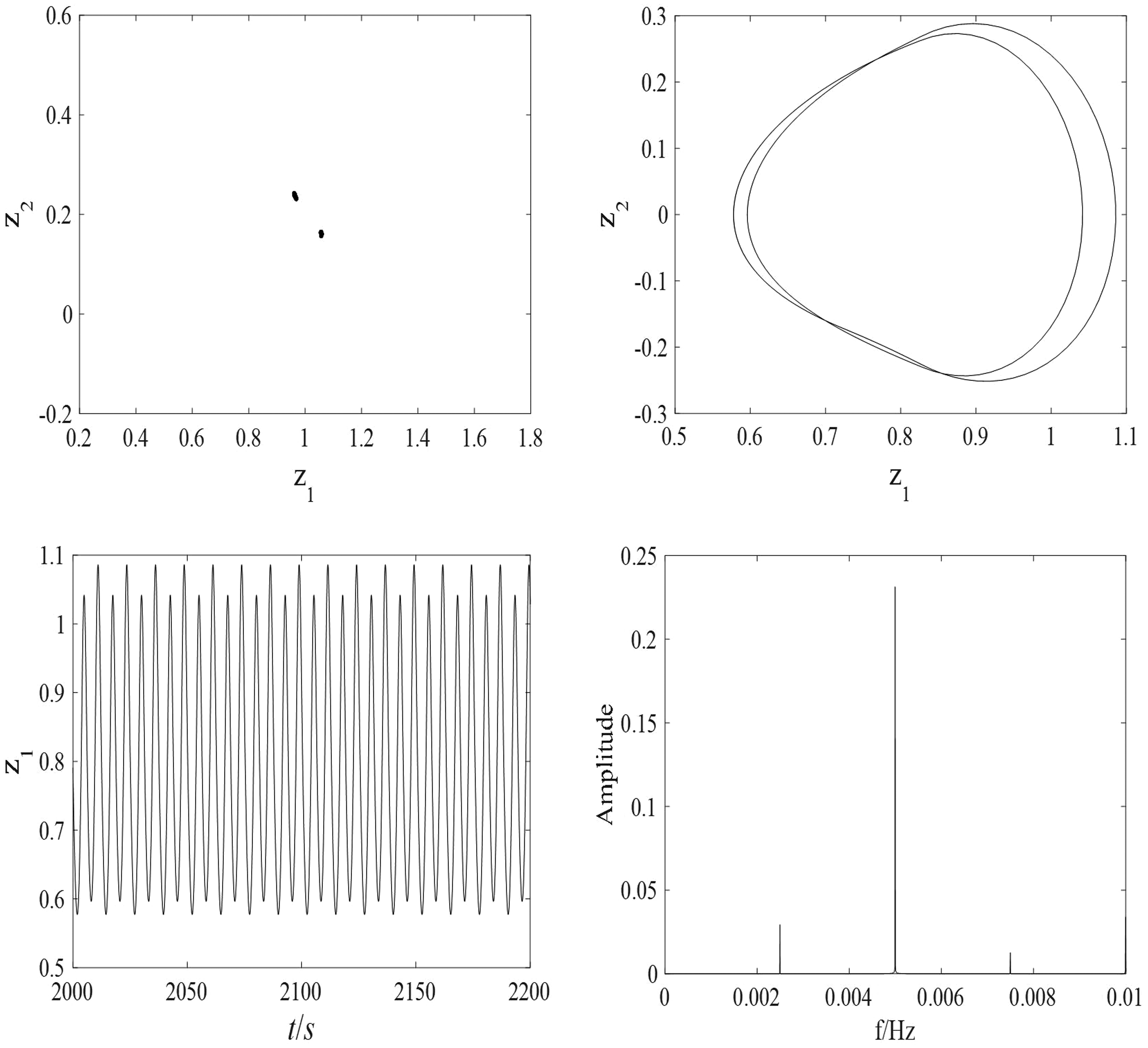
Poincaré map, phase diagram, time history, and FFT spectrum of the system when
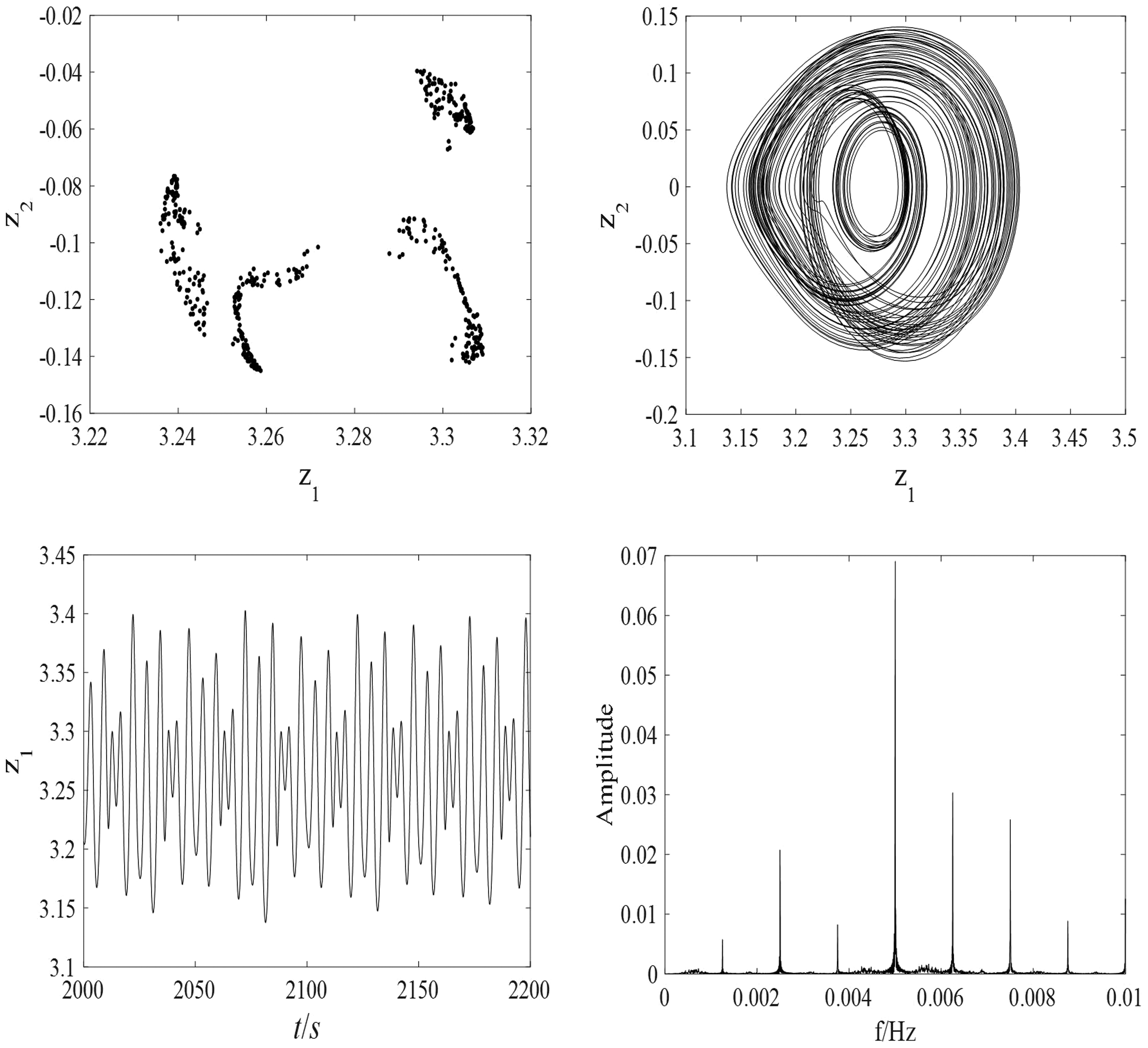
Poincaré map, phase diagram, time history, and FFT spectrum of the system when
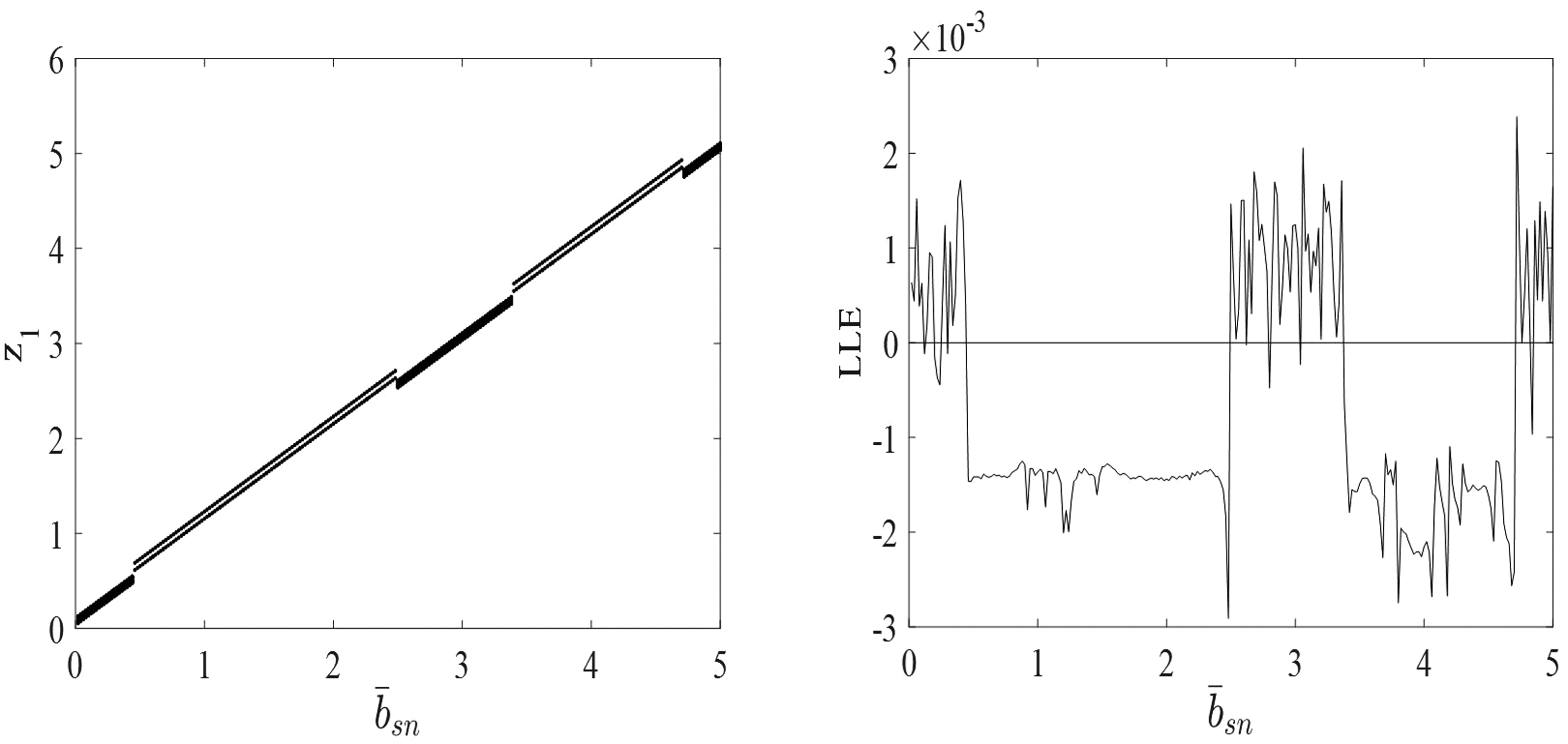
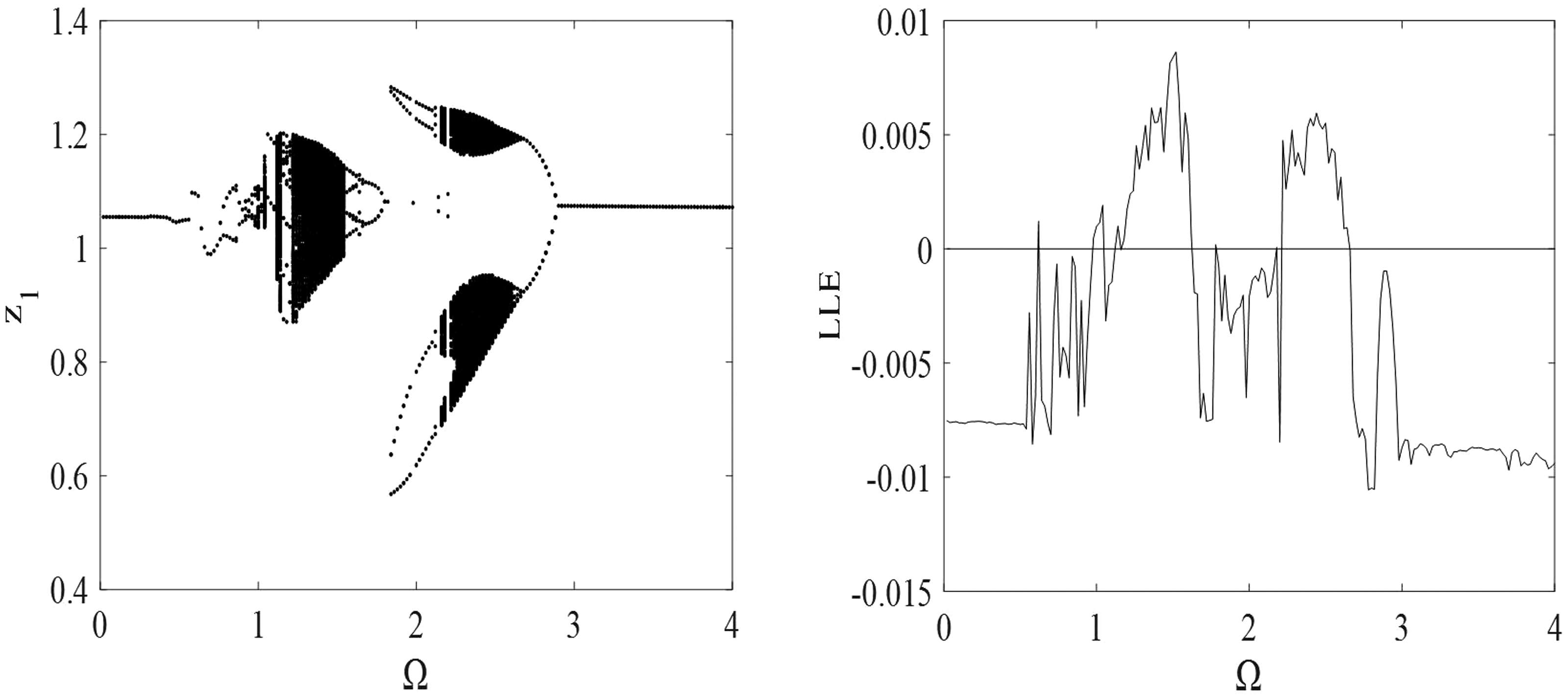
In order to further explain the influence of the dimensionless sun–planet backlash
Bifurcation diagram and LLE of the system with
Bifurcation diagram and LLE of the system with
The dimensionless excitation frequency

Bifurcation diagram and LLE of the system with
It can be seen from Figure 28 that when the dimensionless ring–planet backlash
When
The motion state of the system: 2 T-periodic motion
Poincaré map, phase diagram, time history, and FFT spectrum of the system when
Poincaré map, phase diagram, time history, and FFT spectrum of the system when
Poincaré map, phase diagram, time history, and FFT spectrum of the system when
In order to further explain the influence of the dimensionless ring–planet backlash
Bifurcation diagram and LLE of the system with
Bifurcation diagram and LLE of the system with
Conclusion
For the planetary gear system considering the coupling effects of friction and lubrication, based on the EHL theory, the stiffness and damping of the squeeze oil film are obtained. They are coupled in series with the meshing stiffness and meshing damping of the gear pair to obtain the system’s equivalent stiffness and equivalent damping. A torsional dynamic model of the planetary gear transmission system considering friction, oil film, time-varying meshing stiffness, meshing damping, and backlash is established. The Runge–Kutta numerical method is used to solve the system vibration equation. The bifurcation diagram, LLE, Poincaré map, phase diagram, time history, and FFT spectrum are used to analyze the bifurcation and chaos characteristics of the system. The conclusions obtained are as follows: With the increase of the excitation frequency, the planetary gear system exhibits rich bifurcation characteristics, during which multiple bifurcation points and jumping points appear. The system experiences motion states such as short-period motion, long-period motion, and chaotic motion, which shows that the coupling of nonlinear factors such as equivalent stiffness, equivalent damping, and mixed EHL friction makes the planetary gear system exhibit rich nonlinear dynamic behavior. With the increase of lubricant viscosity, the system begins to experience chaotic motion accompanied by the periodic window, and then jumps from chaotic motion to 4 T-periodic motion through jump shock. After the system temporarily appeared 4 T-quasiperiodic motion, it returned to 4 T-periodic motion. Finally, the system bifurcates from 4 T-periodic motion to 2 T-periodic motion through inverse doubling bifurcation. By changing the lubricant viscosity to analyze the response of the system with excitation frequency, it is concluded that with the increase of the lubricant viscosity, at low excitation frequency, the system delays into chaotic motion, and the range of chaotic motion decreases; at high excitation frequency, the system motion becomes more complex and multi-period motion appear, which results in an increase in the periodic motion area of the system. The chaotic degree of the system decreases slightly throughout the excitation frequency range. With the increase of sun–planet backlash, the system first changes from chaotic motion to two-periodic motion, and after several changes between chaotic motion and 2 T-periodic motion, the system finally returns to chaotic motion. By changing the sun–planet backlash to analyze the response of the system with excitation frequency, it is concluded that with the increase of the sun–planet backlash, at low excitation frequency, the periodic window in the chaotic region of the system decreases and chaotic motion of the system increases; at high excitation frequency, the bifurcation characteristics of the system become complicated and system enters chaotic motion in advance. In the whole excitation frequency region, the degree of system vibration becomes larger, and the degree of chaos is basically unchanged. With the increase of the ring–planet backlash, the system first changes between chaotic motion and 2 T-periodic motion, then changes from 2 T-periodic motion to 4 T-periodic motion by doubling bifurcation. Finally system enters into chaotic motion after several jump shocks. By changing the ring–planet backlash to analyze the response of the system with the excitation frequency, it is concluded that with the increase of the ring–planet backlash, at low excitation frequency, the system delays entering chaotic motion and the period window in the chaotic region becomes smaller, which leads to the reduction of two chaotic regions to one chaotic region in the system; at high excitation frequency, the system moves from 1 T-periodic motion to 4 T-periodic motion in advance, and a periodic window appears in the chaotic region.
Highlights
1. Under the coupling effect of friction and mixed elastohydrodynamic lubrication (EHL), a torsional dynamic model of the planetary gear system with friction, oil film, time-varying meshing stiffness, meshing damping, and gear backlash is established.
2. The dynamic characteristics of the planetary gear system are studied from the state of motion, and bifurcation and chaos characteristics, and mainly analyzed from different excitation parameters such as excitation frequency, lubricant viscosity, sun–planet backlash, and ring–planet backlash.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: Natural Science Foundation of Liaoning Province of China (2020-MS-216), Liaoning BaiQianWan Talents Program (2019A31), China postdoctoral Science Foundation (2017M610496), State Key Laboratory of Mechanical Transmissions (SKLMT-KFKT-201605), and National Natural Science Foundation of China (5187096).