
Abstract
This paper describes the design and fabrication of a dielectric elastomer actuator vibration isolator and accompanying hysteresis compensation controller. The results of experiments to elucidate the hysteresis properties and the quality of the vibration isolation are also presented. The model used to characterize the hysteresis properties of the dielectric elastomer actuator is based on the controlled auto-regressive model and employs the recursive least squares method. A closed-loop proportional–integral–derivative controller was developed to compensate the hysteresis and was tuned via the back propagation neural network algorithm. The results demonstrate that the controller can compensate the hysteresis of the dielectric elastomer actuator, and the dielectric elastomer actuator can be used to isolate incoming vibration from the base. When tested using a narrow band vibration in a 5 Hz band, the isolation of the dielectric elastomer actuator vibration isolator was 45.60% across the frequency band.
Introduction
Smart materials and structures have attracted considerable attention over the past decade. Dielectric elastomers (DEs) are a family of soft electroactive materials that consist of a polymer film sandwiched between two compliant electrodes. These structures have several advantages, including light weight, low compliance, high stretch ability, short response time, high energy density, high efficiency over a broad range of frequencies, and chemical and biological compatibility.1–5 Thus, DE structures are of interest in many areas of engineering, and several implementations have recently been presented in the literature, including grippers, 6 artificial muscles, 7 and soft robots. 8
Hysteresis exists in many smart material structures; however, this makes the effective use of smart actuators and sensors quite challenging. 9 Many literatures to date have focused on actuator concepts and modeling dielectric elastomer actuators (DEAs) based on viscoelastic models. 10 Recent research efforts on DEA focus on both static and dynamic material characterization11,12 as well as on the accurate analysis of the underlying physical phenomena.13,14 In our early work, we encountered hysteresis when working with DEA materials and found that the size of the hysteresis loop is related to the frequency and amplitude of the actuating voltage and is typically due to the energy dissipated as material internal friction. York et al. 15 reported the hysteresis behavior of DEA and set an experiment to characterize the behavior. From this perspective, hysteresis must be considered when developing control strategies.
The hysteresis in DEA materials, resulting in nonlinearities of the system, limits their performance when operating in an open loop configuration. 16 In recent papers, researchers have attempted to use feedback control as a means to mitigate the nonlinearities and uncertainties inherent in DEAs. In the past decade, most of the work on this subject has focused on proportional–integral–derivative (PID) control. Rosset et al. 17 attempted to control the DEA actuator using a sensor-free PI control loop scheme. Yun and Kim 18 presented a PID design based on a discrete time autoregressive moving average with exogenous inputs (ARMAX) model for the position control of a DEA microgripper. Randazzo et al. 19 implemented a PID control algorithm in order to simultaneously regulate the angular position and force of a joint. Some researchers have proposed alternative control strategies based on adaptive model inversion. Sarban and Jones 20 designed a black-box finite impulse response filter instead of a physics-based model to represent the dynamics of a DEA in order to realize active vibration control using the DEA. Wilson et al. 21 investigated the implementation of a biomimetic control scheme on a DEA, which is called the cerebellar-inspired controller. Most of the related literature employs PID controllers to track an actuating voltage, but few works have focused on the control of the DEA in the presence of a disturbance or vibration. In order to control DEAs in the presence of disturbances requires model-free adaptive solutions or design approaches based on explicit compensation of the nonlinearities. 22 While these approaches may result in control laws that exhibit good performance, compared to conventional solutions, these implementations are more complex and require a significant amount of real-time computation. The purpose of this paper is to develop a closed-loop strategy for a DEA vibration isolator to compensate the hysteresis of the material. First, a hysteresis model of the DEA is developed. In order to describe the properties of the hysteresis, a phenomenological model that combines the controlled auto-regressive model (CAR)23,24 and the recursive least squares (RLS)25,26 method is proposed. 27 Based on a nonlinear autoregressive with external input (NARX) model, a PID controller is tuned via a back propagation (BP) neural network to control an artificial muscle system. 28 After the method is presented, experimental validation is performed on a DEA vibration isolator. The result shows that hysteresis compensation control in DEA vibration isolation systems allows them to compensate for the hysteresis of the DEA.
In this work, we precisely describe the hysteresis phenomenon of the DEA via a simple linear CAR model with experimental data. Different from the presented physics-based model of the DEA, the model we used is with lower order and has advantage in control strategies. Then we design a controller to reduce the vibration from the base of the DEA. The experimental results demonstrate that the controller can compensate the hysteresis of the DEA and the DEA can be used to isolate incoming vibration from the base.
The rest of this paper is organized as following. In the upcoming section, the fabricated DE vibration isolator and the hysteresis properties of the DEA are introduced. In a further section, the phenomenological model is developed and a hysteresis compensation control strategy is developed to isolate the vibration. In the penultimate section, the hysteresis is identified and the vibration isolation with the closed-loop control is experimentally validated. Some conclusions are provided in the final section.
Fabrication of the DE vibration isolator and the hysteresis property
In this study, a circular DEA was designed and fabricated for the purpose of vibration isolation. The membrane of the DEA was based on a proprietary acrylic elastomer very high bond (VHB 4910) adhesive tape from 3 M. 29 The DE was equi-axially pre-stretched four times before being bonded to a PMMA framework. After pre-stretch, the thickness of the membrane is 0.25 mm. Then, the membrane was coated on both sides with a compliant carbon grease. The pre-bias for the DEA was supplied by a spring. The structure and dimensions of the circular DEA are shown in Figure 1. When driven by a step voltage, the DEA moves vertically. The DEA can use as a vibration isolator and can cancellate the vibration from the base. When applied on high voltage, the top of the DEA generates an inverse displacement to cancel the vibration. However, the DEA is affected by the viscoelastic behavior of the elastomeric membranes, which causes the displacement to experience a hysteresis effect. Furthermore, the size of the hysteresis loop is related to the frequency and amplitude of the actuating voltage. The hysteresis model and identification algorithm are introduced in the following sections.
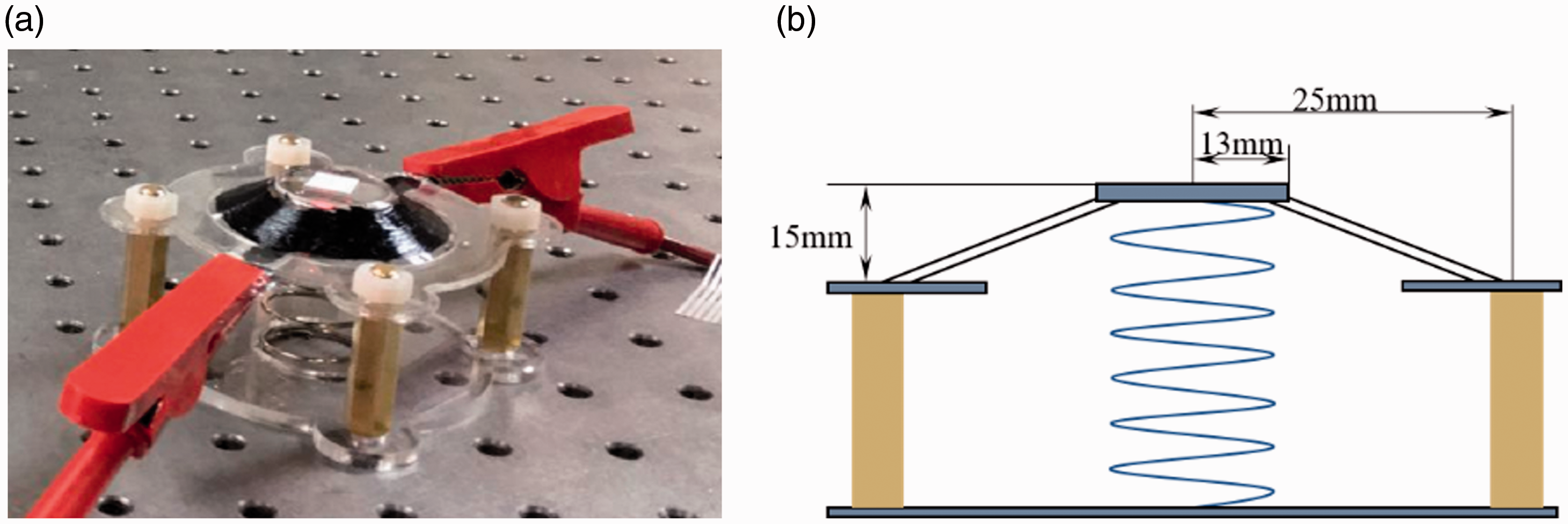
Structure and dimensions of the circular DEA. (a) Structure of the DEA, (b) Dimensions of the DEA.
Design of a hysteresis compensation controller
Identification of the hysteresis
A DEA is a complex system with nonlinear, hysteresis-related, and time-varying properties. To date, research into the modeling of DEA systems has been limited to the development of accurate physical models. 30 But most of them are with high order and therefore unsuitable for use in a control strategy. Only few papers have been published on controller designs for DEAs based on physical models. 31 Rizzello et al. proposed a detailed electro–mechanical nonlinear model of the system, which was subsequently used to develop a PID controllers providing precise tracking of steps or sinusoidal reference signals. In our work, we concentrate on imitating and compensating the hysteresis of the DEA, and then a control strategy is designed to eliminate the vibration from the base. The model proposed in the paper is a kind of phenomenological model using the CAR to describe the hysteresis properties, which were obtained using the RLS method. The proposed model is able to accurately track the hysteresis properties of the DEA and can be used in the design of the control strategy. The next section introduces experiments related to the hysteresis.
The type of the hysteresis of the DEA is a rate-dependent type, and the hysteresis behavior can be well described by a linear model.
32
In this paper, a linear CAR model is adopted to reproduce the hysteresis of the DEA. First, in terms of the RLS method, the equation describing the DEA using the CAR model is as follows


The least squares form of the CAR model can be written as follows


Assuming the estimated parameters vector of


Then, the error between the actual and estimated output is

In the Nth observation, the RLS algorithm requires the derivative with respect to the sum S of error ε in equation (4) to be equal to zero in order to obtain the minimum error results. Finally, the recursive extended least squares identification law can be obtained as follows and the detailed derivation can been found in Sinha.
33
Design of the closed-loop controller
The development of the control strategy for the DEA vibration isolator is based on the hysteresis model developed in the previous subsection, which was used to tune a PID controller via a BP neural network
34
containing three layers of neurons. The controller can compensate the hysteresis of the DEA, as the BP neural network has the ability to reproduce and model nonlinear processes.
35
The neural network is shown in Figure 2. The first layer of the network is the input layer, and the input to the network is the tracking error between the real and expected outputs, as shown in equation (6).

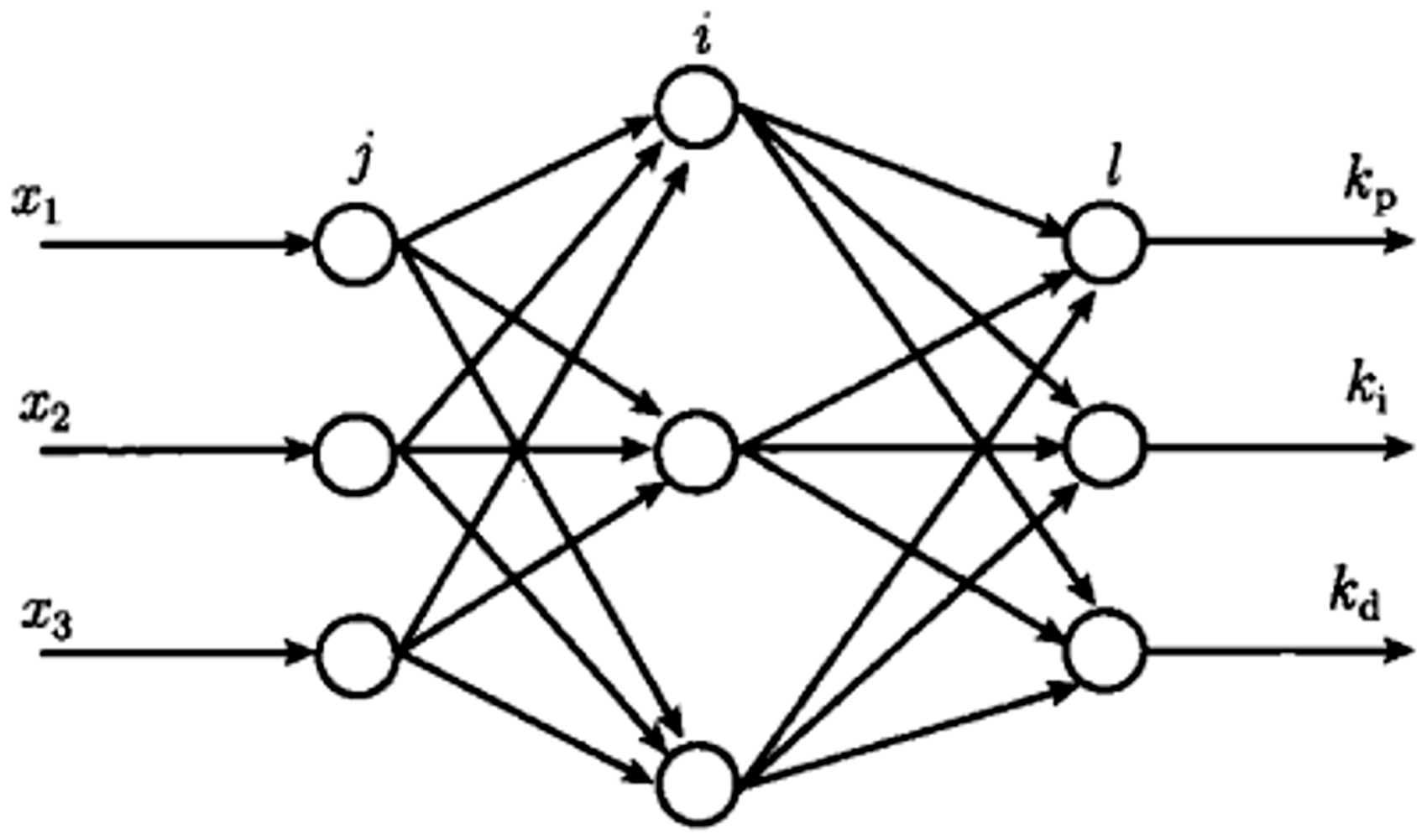
Control strategy of the DEA vibration isolator.
The input and output of the hidden layer of the network is as follows

The output and input of the output layer are as follows


The outputs of the network represent the tuned parameters of the PID controller. The transfer function of the output layer is expressed as

The weight of the neural network controller is trained by the optimal objective function

The weights of the network are adjusted as per the gradient descent method and an inertial item is added to ensure fast convergence.



The partial derivative of the control increment over the outputs synthesized using the above equations can be written as follows
The learning algorithm of the network output layer weights can be written as follows


The above described algorithm was used to tune the parameters based on the BP neural network, and the outputs of the network are the tuned PID parameters. The control input u can be calculated as per equation (19) and the control structure of the PID algorithm for the BP neural network is shown in Figure 3.

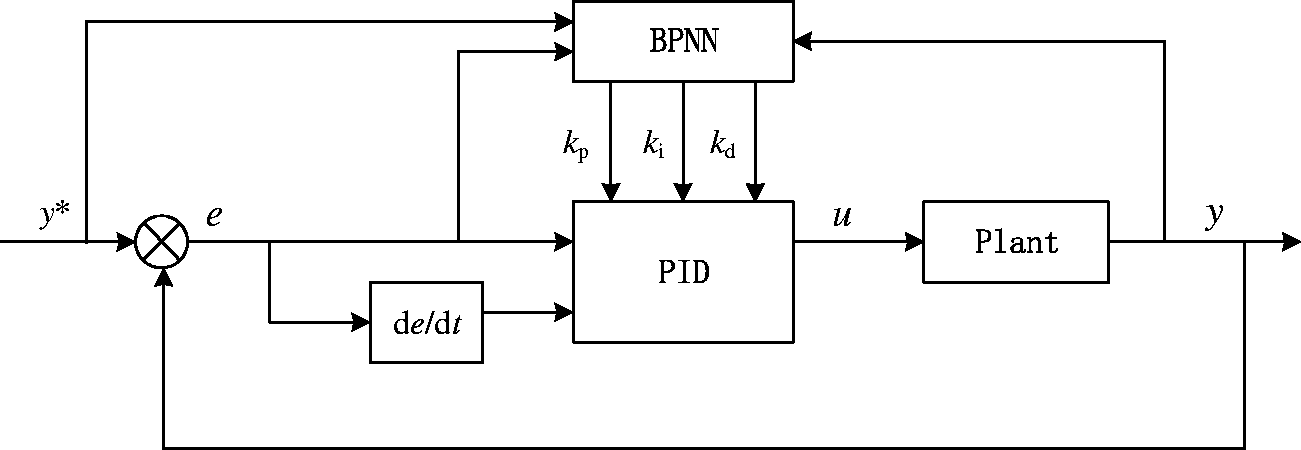
Control structure of BP neural network PID algorithm. BPNN: BP neural network; PID: proportional–integral–derivative.
Experimental verification and results
The phenomenological model describing the hysteresis in the DEA and the BP neural network tuned PID algorithm were verified by using several experiments. The experimental setup is shown in Figure 4, and it can be seen that the rigid frame of DEA is connected to an electrodynamic shaker via a threaded bolt. The vibration is generated by the electrodynamic shaker. An actuating voltage is generated by a high-voltage amplifier (TREK 10/10B) and the displacement of the DEA is measured by a laser sensor (KEYENCE G80). The hysteresis compensation control strategy was implemented in LabVIEW and a National Instruments digital controller (cRIO 9033) was used to generate the control signal. When subjected to vibration control, the top of the DEA can produce a displacement counteracting vibration from the shaker. The experimental results are presented in two parts: first, the properties of the hysteresis were identified, and second, the vibration isolation results for the DEA were obtained.
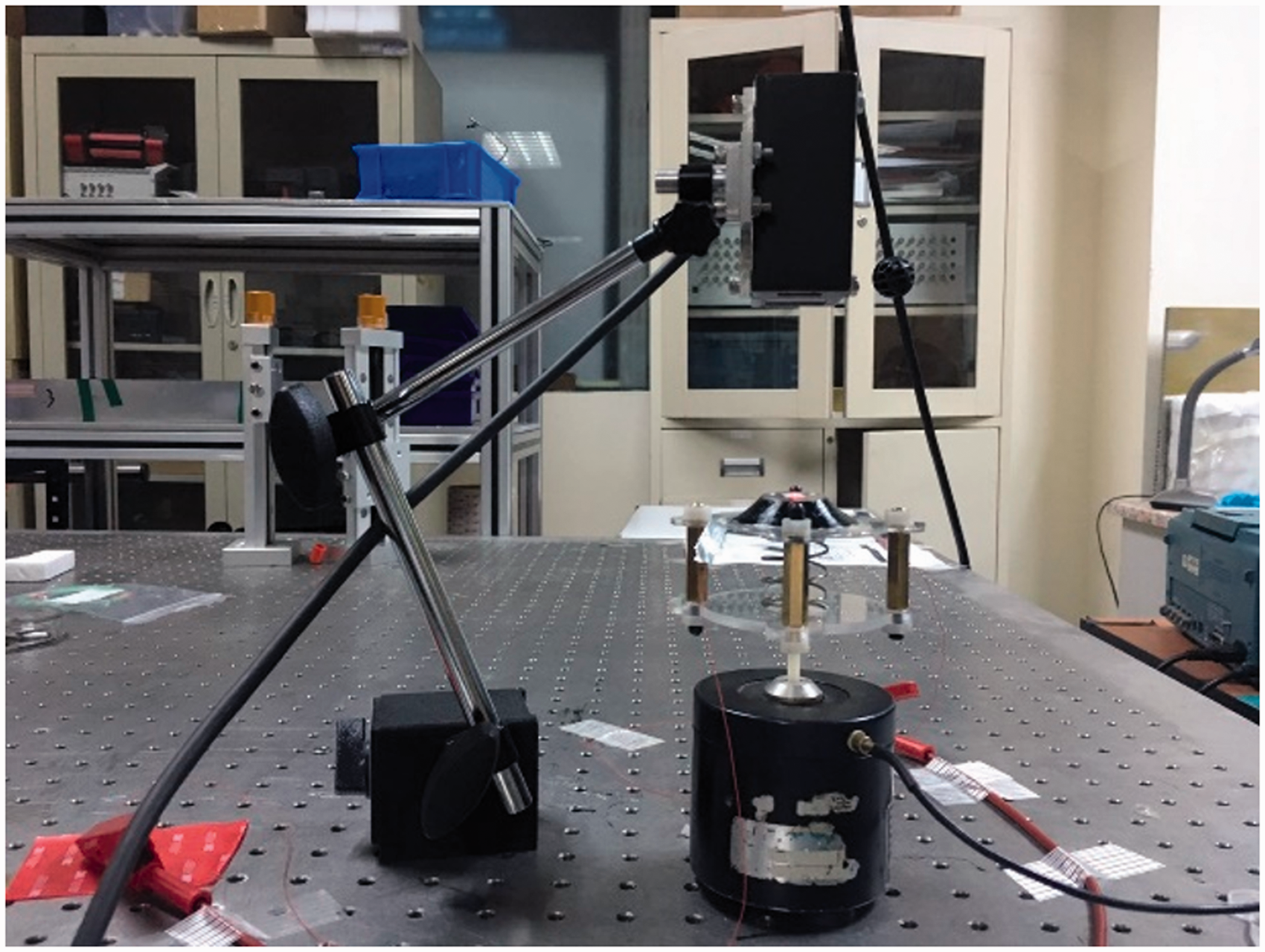
Experimental setup of the DEA vibration isolator.
Identification of the hysteresis properties
First, experimental results are presented to validate the estimator used to identify the hysteresis properties of the DEA. The actuating voltage was applied with the sinusoidal signal

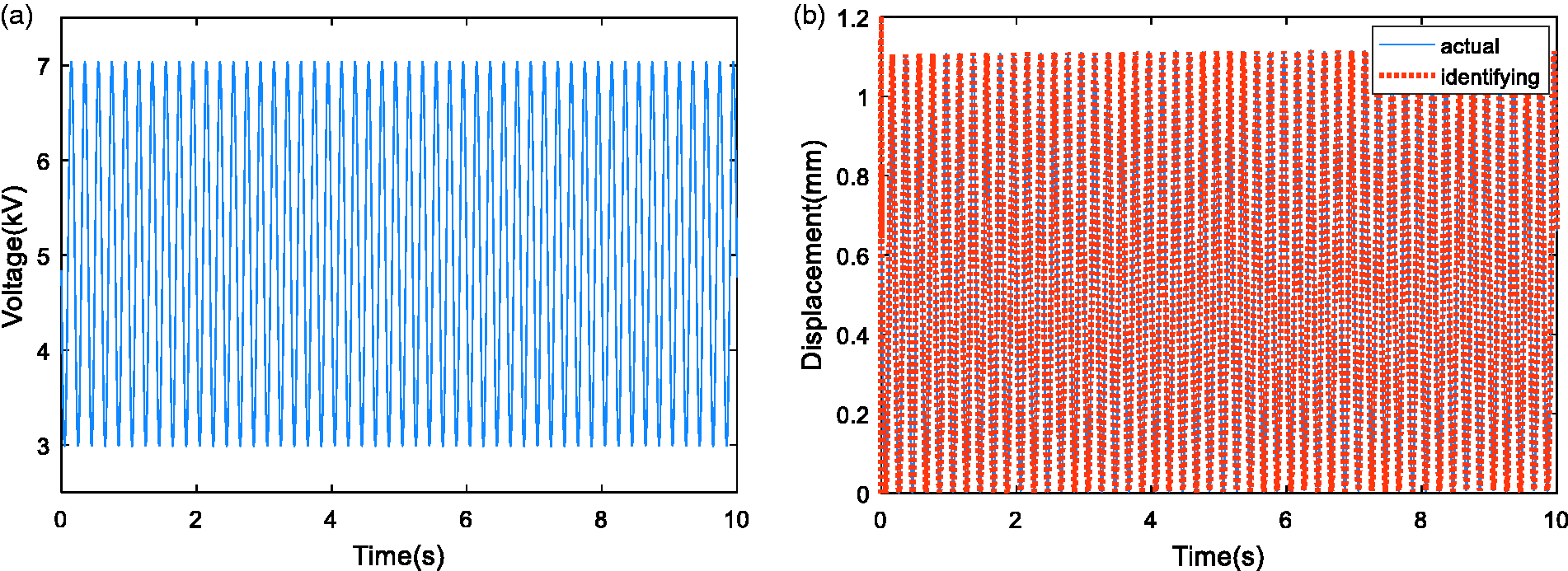
Identification results in the time domain. (a) Input voltage, (b) Actual and identifying signal.
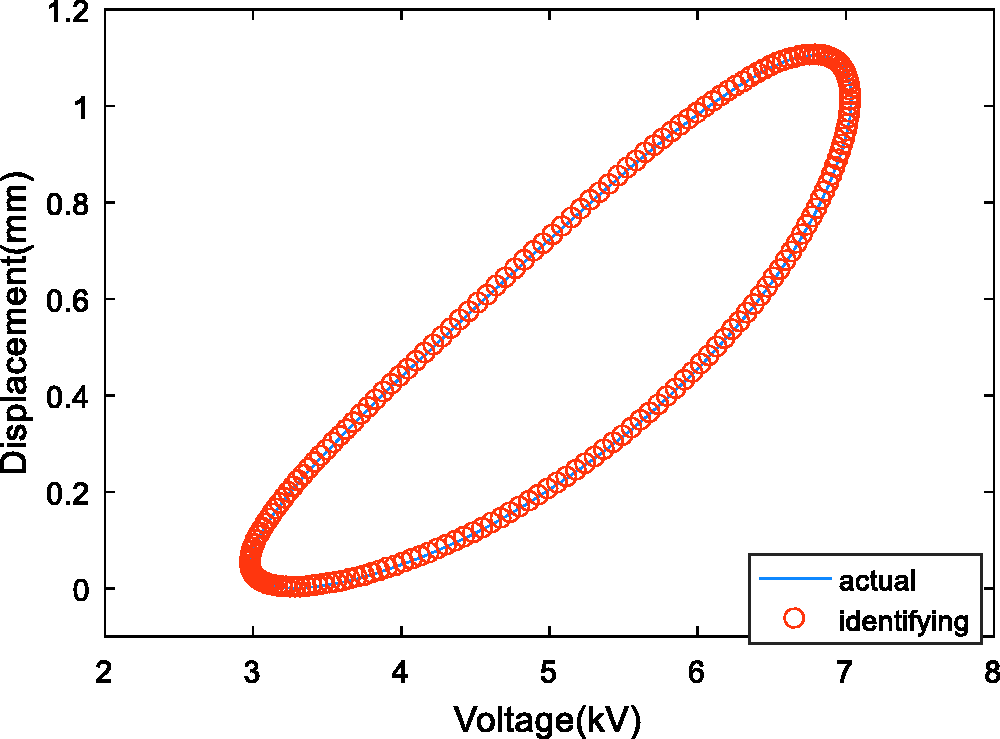
Identification results for the hysteresis loop.
The accuracy of the identification is 99.87% by the experimental verification using this equation.
In terms of the rate-dependent hysteresis, the different amplitudes and frequencies of the applied actuating voltage had a significant influence on the hysteresis characteristics. The hysteresis properties for different amplitudes and frequencies of the actuating voltage for the DEA are shown in Figure 7(a) and 7(b), respectively. Figure 7(a) shows hysteresis loop of the different frequencies of the applied voltage bias at 5 kV and the frequencies are 3 Hz, 5 Hz and 8 Hz. Figure 7(b) illustrates hysteresis loop of the different bias voltage bias at 3 kV, 4 kV, and 5 kV and the frequencies is 5 Hz. Based on these results, the hysteresis properties obtained via the CAR model were validated.
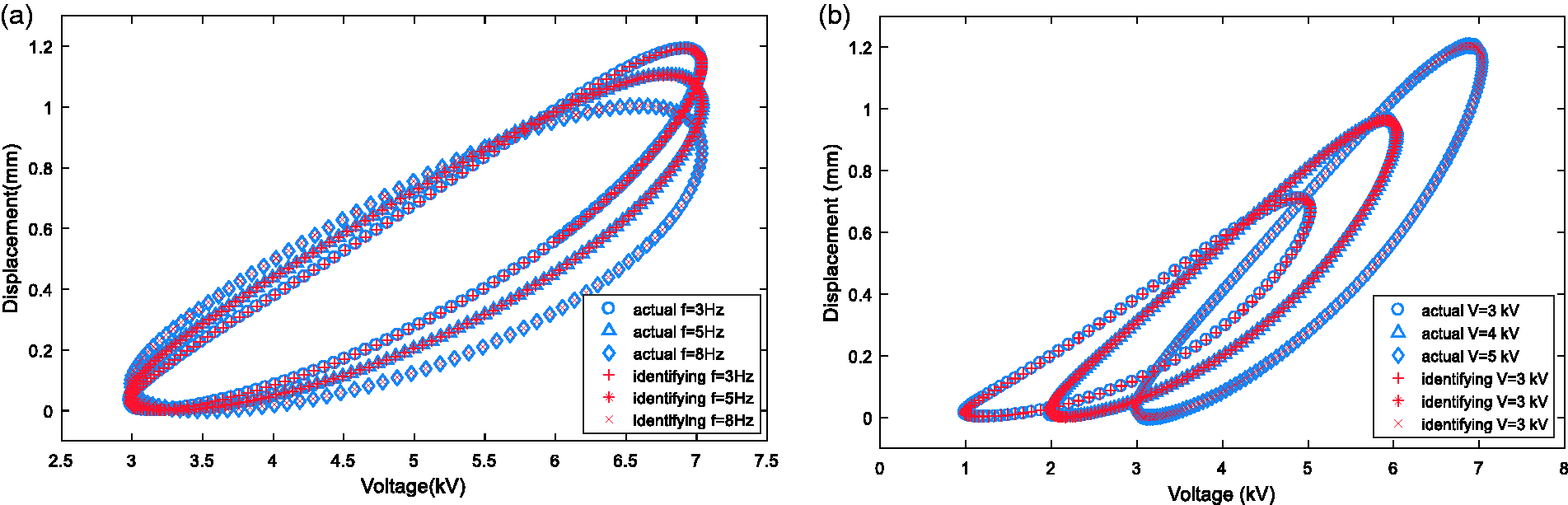
Hysteresis with different (a) frequencies and (b) amplitudes of voltage.
In summary, the RLS identification method was found to accurately characterize the hysteresis. Furthermore, the size of the hysteresis loop was affected by not only the amplitude but also the frequency of the applied input voltage on the DEA. More importantly, the CAR model was able to accurately track the actual data. Thus, the CAR model was effective at describing the properties of the hysteresis.
Experimental verification of the hysteresis compensation control
A vibration isolation experiment was conducted when the control block was configured as a closed loop in order to isolate a low frequency vibration. The electrodynamic shaker generated a disturbance to the DEA at an amplitude and frequency of
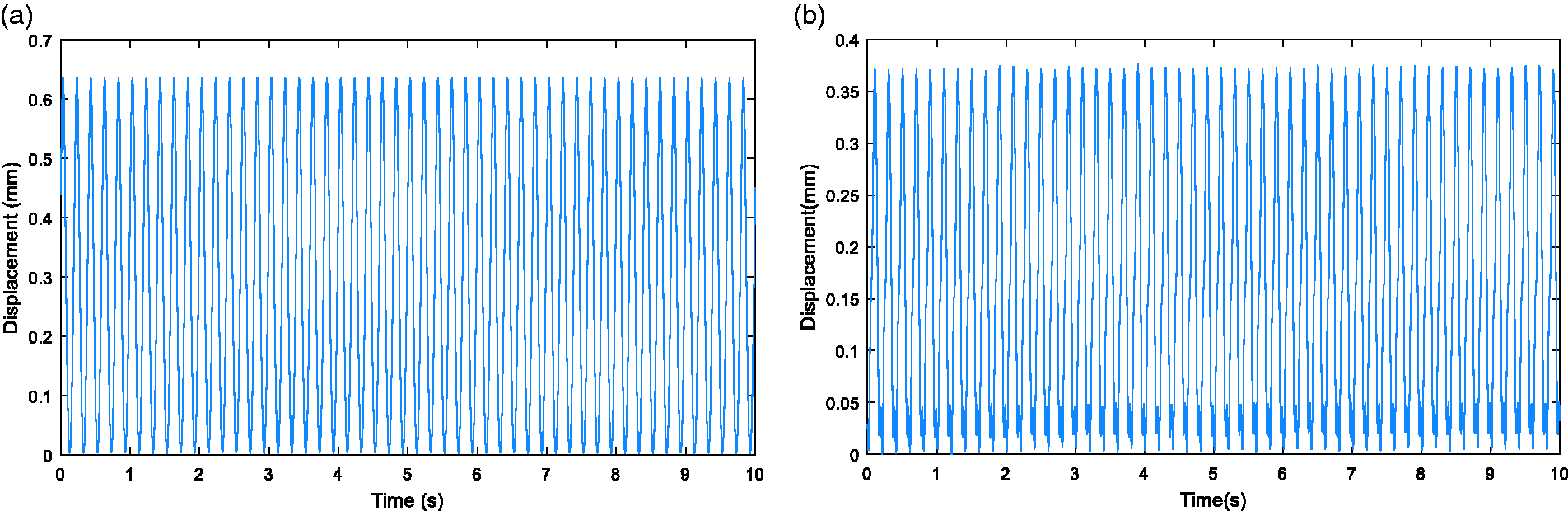
(a) Output displacement without control. (b) Output displacement with control.
The spectral analysis of the output without control and with control is shown in Figure 9. From the frequency spectrum of the output displacement, the peaks at a frequency of 5 Hz without and with control were 0.3066 and 0.1668 mm, respectively. These results indicate that the isolation of the DEA with hysteresis compensation control was about 45.60%, which demonstrates the feasibility of isolating the disturbance from the base via the closed-loop PID control.
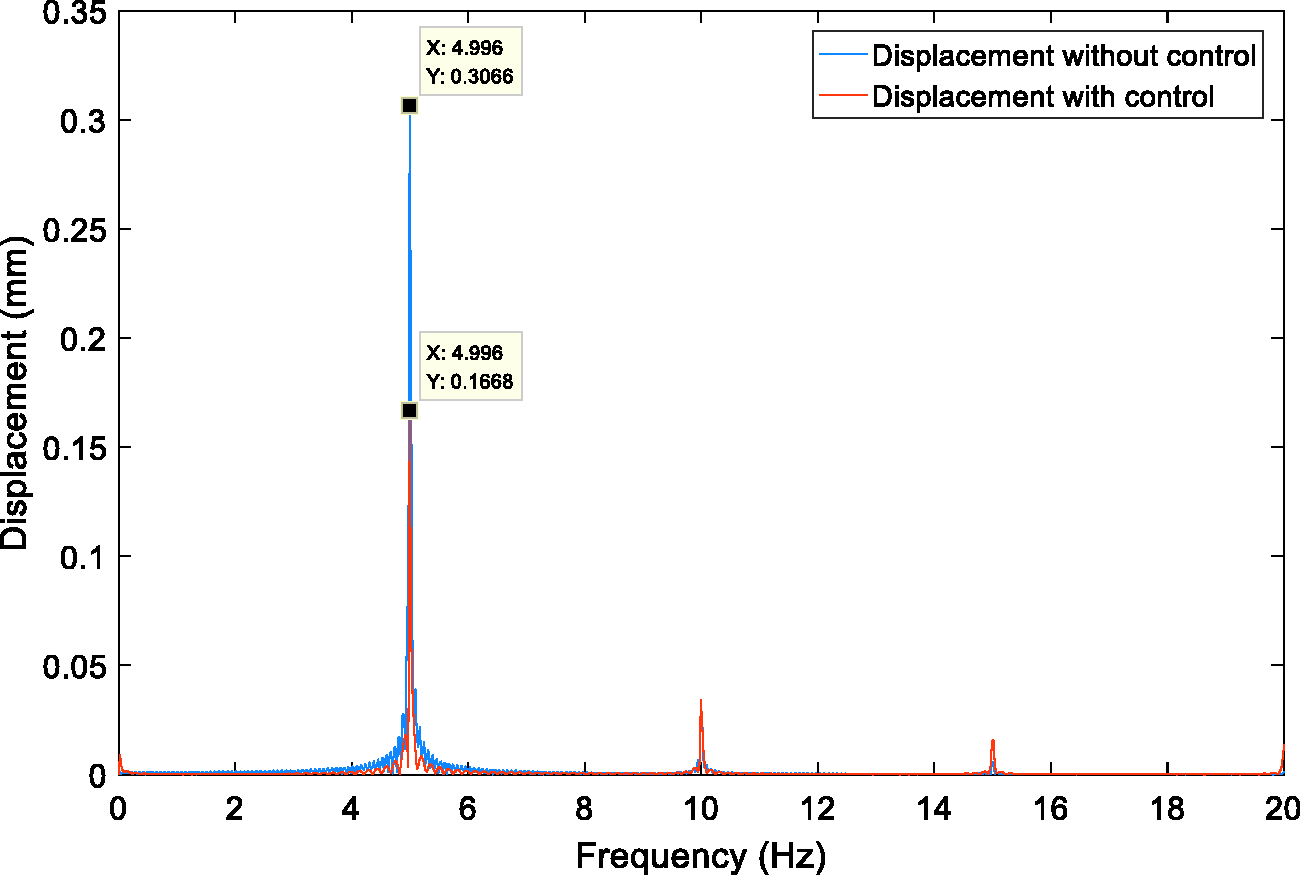
Fast Fourier transform (FFT) of the output displacement signal without control and with control.
The data from the DEA vibration isolation experiments in the time and frequency domains for actuation voltages oscillating at 3 and 8 Hz are shown in Figures 10 and 11, respectively. From the frequency spectrum of the output displacement, the peaks of the vibration without and with control have been reduced by 50.78% at 3 Hz and 24.48% at 8 Hz. This demonstrates that the DEA is able to isolate the vibration from the base.
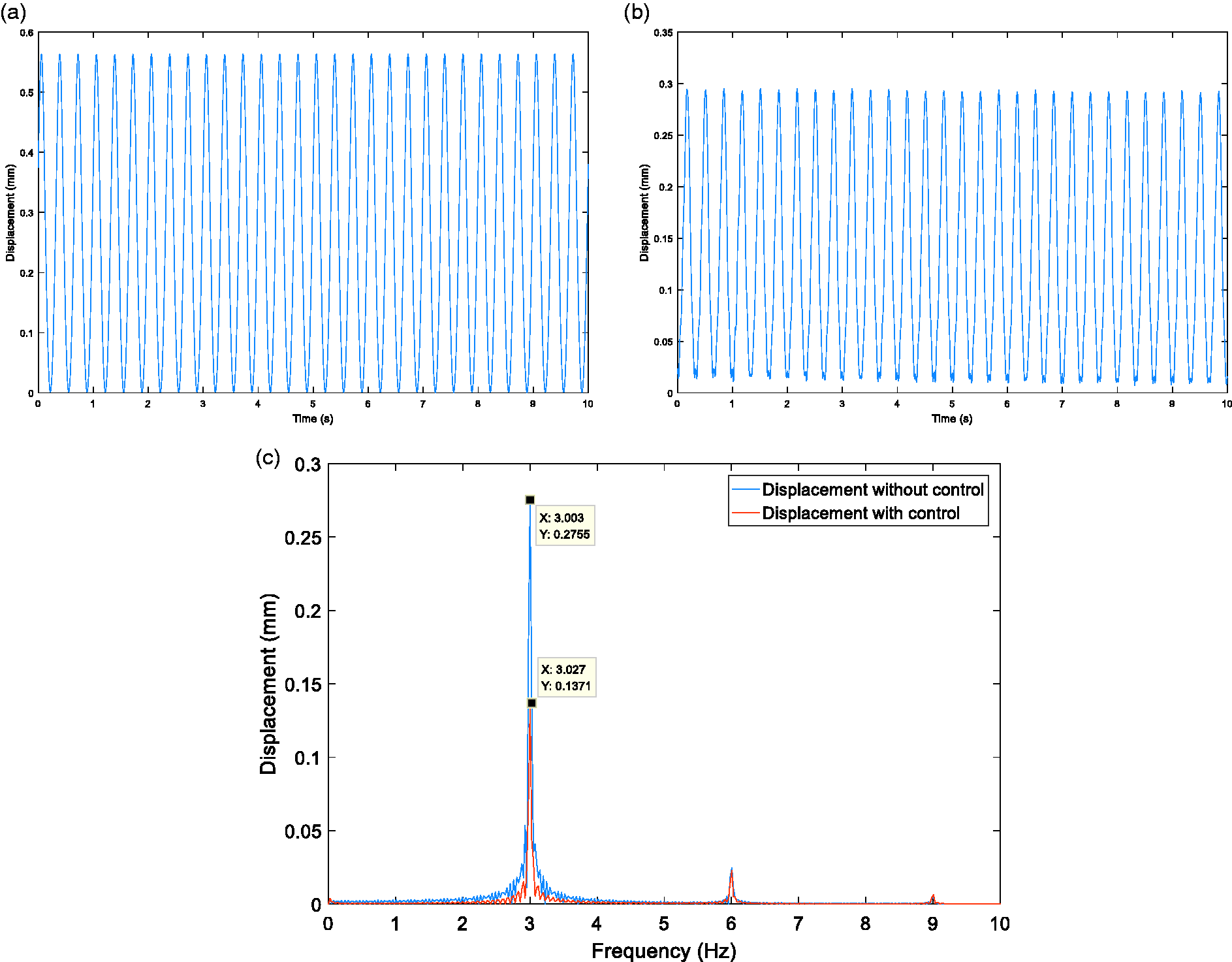
Experimental data for an actuation voltage oscillating at 3 Hz: (a) output displacement without control, (b) output displacement with control, and (c) Fast Fourier transform (FFT) of the output displacement signal without and with control.
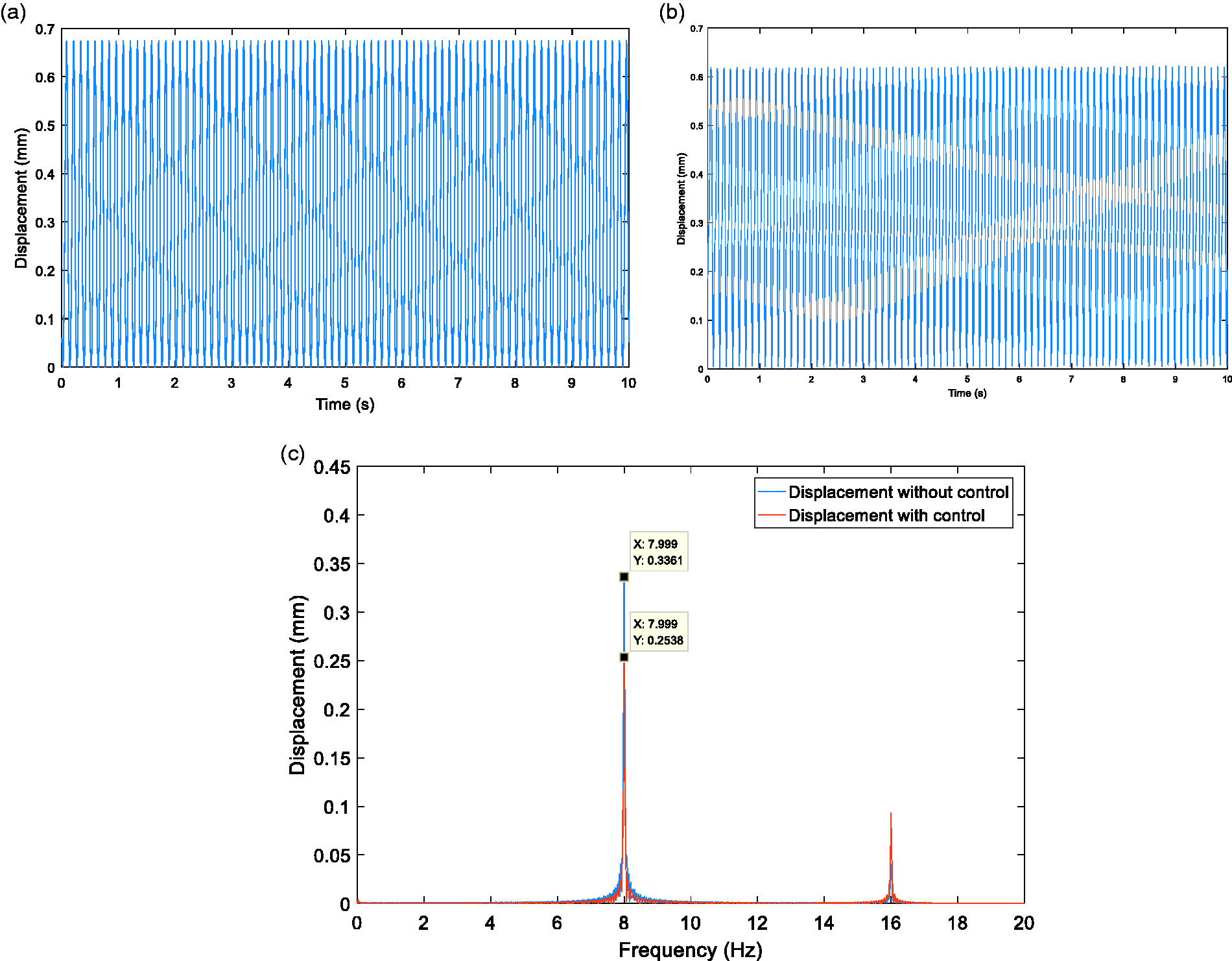
Experimental data for an actuation voltage oscillating at 8 Hz: (a) output displacement without control, (b) output displacement with control, and (c) Fast Fourier transform (FFT) of the output displacement signal without and with control.
In summary, as verified by the experiment, the hysteresis was identified with the RLS method, as were the amplitude reductions of the output displacement in the spectral analysis, which amounted to 45.60% when the BP neural network tuned the PID algorithm. Finally, based on these results, the validity of using the hysteresis compensation control in the vibration isolation algorithm was confirmed.
Conclusions
In this paper, a DEA with hysteresis was employed in a vibration isolation application. A phenomenological model was constructed to characterize the hysteresis using a CAR model based on the RLS method. Furthermore, the CAR model was used to represent the hysteresis in the DEA in practical experiments. In addition, by experiment, the amount of isolation in the DEA was found to be 45.60%. In summary, it was confirmed that the hysteresis compensation control could effectively attenuate the vibration in the DEA.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant no. 11372179), the National Key Technologies R&D Program of China (grant no. 2015BAF07B03), and the Innovation Project of Shanghai (grant no. 15JC1402600).