
Abstract
This paper proposes the visual servoing resolved acceleration control scheme applied to a 3-degree of freedom (DOF) planar manipulator, which aims to reduce computational loads of the feedback control loop and the tracking errors of the end-effector in the conventional resolved acceleration control scheme. The computation loads are increased due to the calculations of the direct kinematics and the velocity inversion in the feedback control loop. The tracking errors of the end-effector are increased due to low-accuracy encoders, gearbox backlashes, and manipulator flexibility, etc. The proposed scheme incorporates a visual system, which directly captures the position of the end-effector instead of calculating the direct kinematics and the velocity inversion. Due to the requirement of inverse dynamics in the proposed scheme, the transformation of the Jacobian matrices between the passive and active links is imposed to the Euler-Lagrange’s equation so as to derive dynamic equations. In order to show the control performances, three existing torque-based control schemes are also applied to the manipulator. This study investigates the numerical simulations and the experimental validations, and the results show that the proposed scheme can reduce the computation loads and the tracking errors of the end-effector to compare with the three existing schemes.
Introduction
Parallel manipulators are essentially closed-loop kinematics chain mechanisms, and an end-effector is linked to the base of the manipulator by several independent kinematics chains. Planar parallel manipulators are useful for manipulating an object on a plane due to high stiffness in nearly all configurations and a high dynamic performance. A 3-
Torque control is one of control schemes by sensing motor torques as feedback signals. In robot control, it becomes popular by using current sensors or dynamic models to calculate motor torques instead of directly applying torque sensors. Because of wide applications, torque control has been related to many studies in recent years. He et al. developed an adaptive impedance control for an n-link robotic manipulator with input saturation by employing neural networks, where both uncertainties and input saturation are considered in the tracking control design. 12 Focchi et al. analyzed the stability region of impedance parameters and the passivity of the system influenced by viable range of stable stiffness and damping values of impedance control. 13 Heshmati-Alamdari et al. presented a model-free control protocol for force controlling of an underwater vehicle manipulator system contacting with an unknown compliant environment, where any knowledge of the system, exogenous disturbances, and sensor’s noise model are unknown. 14 Yue et al. studied the speed control of a permanent magnet synchronous motor with the direct torque control scheme and Speed Vector Pulse Width Modulation (SVPWM), where the fractional order calculus theory is used to design the fractional order proportional–integral–derivative (PID) controller. 15 Sangdani applied an optimal control scheme based on genetic algorithm to a tracker robot with machine vision, and the experimental results revealed the effectiveness of the controller and confirmed the stability of the system. 16 Rani and Kumar proposed a hybrid position/force control scheme for coordinated multiple mobile manipulators holding a rigid object, where the inefficiency of the model-based controller is recovered by combining with a neural network based controller. 17 Kumar et al. investigated three intelligent computed torque control (CTC) schemes applied to a 3-DOF robotic manipulator, where the three control schemes are computed torque proportional-derivative control, computed torque fuzzy logic control, and computed torque adaptive network fuzzy inference system. 18
Resolved acceleration control (RAC) is a kind of torque control, the concept of which was proposed by Luh et al. in 1980, 19 and the concept was further modified as the approach of resolved-motion-rate. 20 In addition to directly deal with the position and direction of the end-effector, it is also necessary to have the prescribed acceleration command. Noshadi et al. presented an intelligent control scheme to track accurately a prescribed trajectory for the system with disturbances, where a two-level fuzzy tuning RAC is applied. 21 The RAC method involves velocity conversion. When a robot manipulator reaches singular points, the inverse Jacobian matrix does not exist, and this causes the RAC controller to diverge. Thus, Wu and Lin proposed an improved method which is damped-acceleration resolved-acceleration control (DARAC). 22 However, the DARAC may cause the trajectory to fluctuate at the end-effector when the joint speed is nonzero, so they propose a modified method damped-rate resolved-acceleration control to solve the singularity problem.23,24 Followed by the pioneers’ work, there are more research works focusing on the applications of the RAC. Ambar et al. applied the RAC to a dual-arm underwater vehicle system, where the robotic arms and the vehicle are coordinated controlled by considering the effects of hydrodynamic forces. 25 Nakano et al. also investigated the RAC of an underwater robot with three-link dual arms by using position and velocity feedbacks from the vehicle and the end-tip of the arms, and the results were compared with those by applying the CTC. 26
Visual servo control is a control method by extracting information from images captured by a vision sensor and delivering back to a controller. Recently, there are more applications on visual servo control. Hutchinson et al. provided a tutorial introduction to visual servo control of robotic manipulators. 27 Besides, Chaumette and Hutchinson presented visual servo control using computer vision data in the servo loop to control the motion of a robot.28,29 Tsai et al. applied visual servo control to a 5-DOF robot manipulator to perform pick-and-place tasks, where a hybrid switched reactive-based visual servo control structure is proposed. 30 Serra et al. presented the landing problem of a vertical take-off and landing vehicle for a quadrotor on a moving platform using image-based visual servo control, and the control law can guarantee convergence to the desired landing spot. 31 Wang et al. proposed an adaptive visual servo controller for soft manipulators contacting with constrained environments, where the controller is based on piecewise-constant curvature kinematics and does not need the manipulator’s length and the target positions. 32 Since image processing techniques can directly obtain the position information of the end-effector of robots, there are more research works addressing visual servo control applied to the robot arms. Wang et al. proposed an adaptive neural network control for visual servoing robotic system, where the unmodeled dynamics and output nonlinearity are taken into account. 33 Feng et al. proposed a robot system with visual servo control and applied to laparoendoscopic single‐site surgery, where an uncalibrated visual servo control method is used to have an accurate positioning capability. 34
The major disadvantage of the RAC needs more computations due to the complexity of the control scheme, so it might yield worse control performances in experimental implementations. Besides, the RAC regulates the angular accelerations of the position of the end-effector, and the position is calculated through direct kinematics. Thus, the correct position might be not obtained. To solve the two problems, this paper proposes a visual servoing RAC (VSRAC), which aims to directly acquire the position of the end-effector and to reduce computations. Furthermore, the RAC requires the inverse dynamics to calculate the motor torques, and it is difficult to have dynamic models for parallel manipulators due to the complicated derivations. This paper also presents an approach by imposing the Jacobian matrices relating the passive and active links into the Euler-Lagrange’s equation so as to derive the dynamic equations. The rest of this paper is organized as follows. First, the kinematics and dynamics of a 3-DOF planar parallel manipulator is presented, where the dynamics is derived by applying the proposed scheme. Secondly, several torque-based control schemes are introduced, where the proposed VSRAC scheme is presented in details. Thirdly, the experimental setup and the experimental results are presented. Finally, some conclusions are presented.
A 3-DOF planar parallel manipulator
A 3-DOF planar parallel manipulator shown in Figure 1 is driven by three motors fixedly located at coordinates
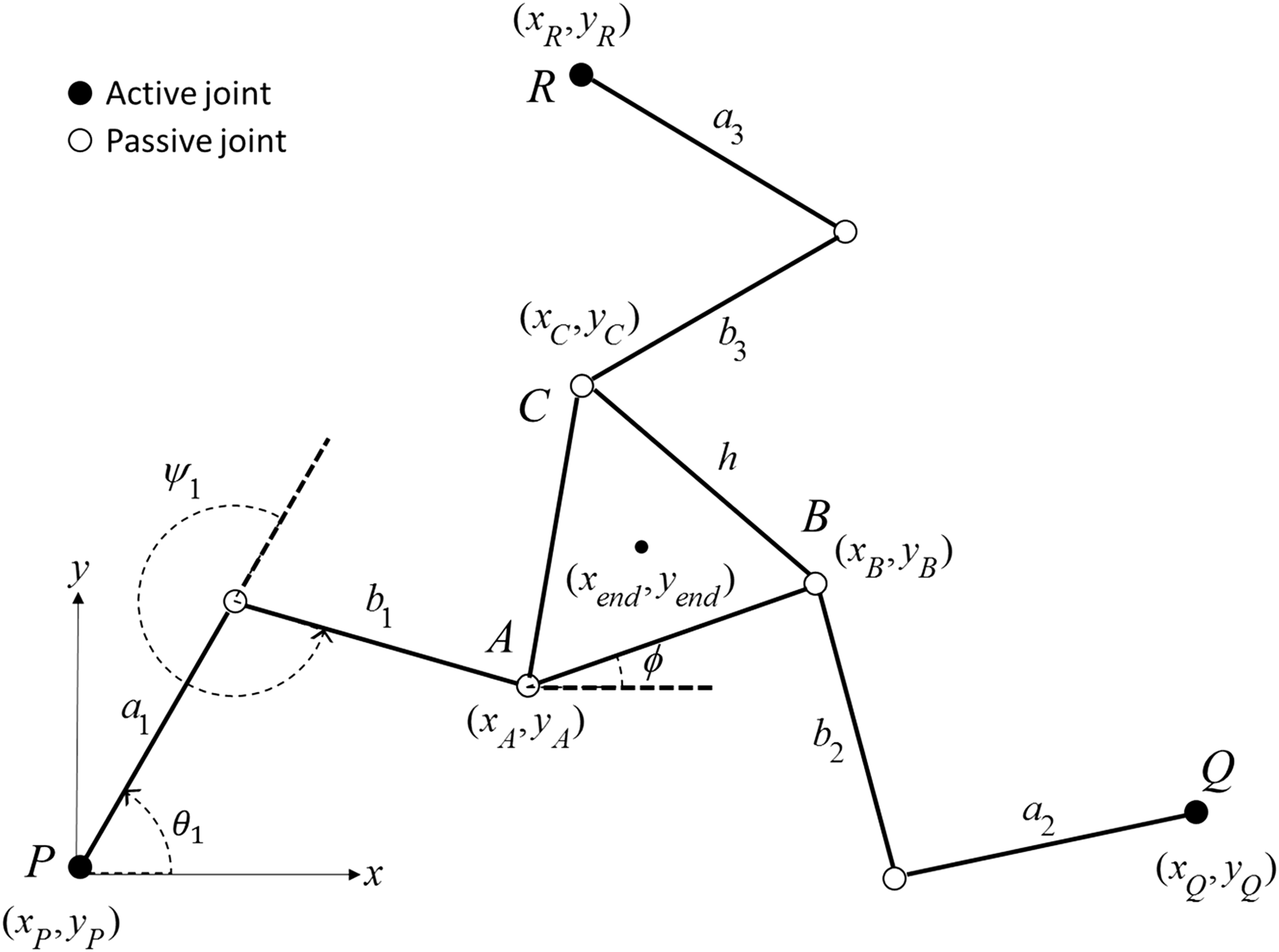
A 3-DOF planar parallel manipulator.
Kinematics of the manipulator
To construct the kinematics of the manipulator, one considers the kinematic chain from coordinates


Summing the squares of this two equations shown in equations (1) and (2) yields

Similarly, two additional equations referring to the other two kinematic chains can be derived as

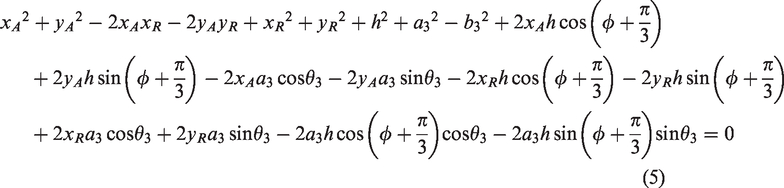
Therefore, equations (3), (4), and (5) describe the relationship of the rotating angles

Dynamics of the manipulator
It is difficult to derive the dynamics models of parallel manipulators due to the complexity of derivations. One presents an approach, which imposes the Jacobian matrices relating the passive and active links into the Euler-Lagrang’e equation. Thus, the dynamics of the manipulator is first obtained by using the Euler-Lagrange’s equation as




From equation (9), one notes that the kinetic energies of the passive links and the end-effector are functions of their own velocities, but the differentiations for applying the Euler-Lagrange’s equation are with respect to the velocities of the active links. Therefore, it is necessary to have the partial derivatives

Differentiating equation (11) with respect to time leads to

Equation (13) can be further arranged as

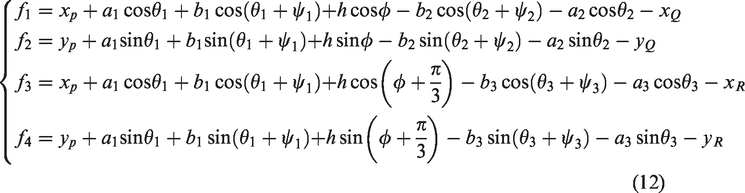
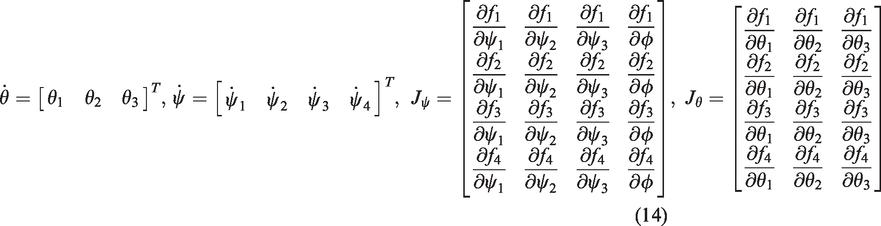
Alternatively, since the passive angles and the inclination angle are functions of the active angles, the time derivatives of the passive angles and the inclination angle are given as


Thus, the equality of equations (15) and (16) leads to

Equation (17) can be used to determine the differentiations in the formulations of the Euler-Lagrange’s equation and then the dynamic equations of the manipulator can be obtained as8–10

Torque-based control schemes
The controllers of the torque-based control schemes will generate desired control torques for motors, and encoders will sense the motor angles and deliver back to the controllers to fulfill the feedback control. Based on this idea, it is necessary to have two feedback loops in the control schemes. The inner loop deals with the torque control of motors, where the motor currents will be sensed by current sensors, and then the currents will be multiplied by the current constants so as to obtain the motor torques. The outer loop deals with the regulations of the angular accelerations of the motors or the accelerations of the end-effector, which depend on the selection of the torque-based control schemes.
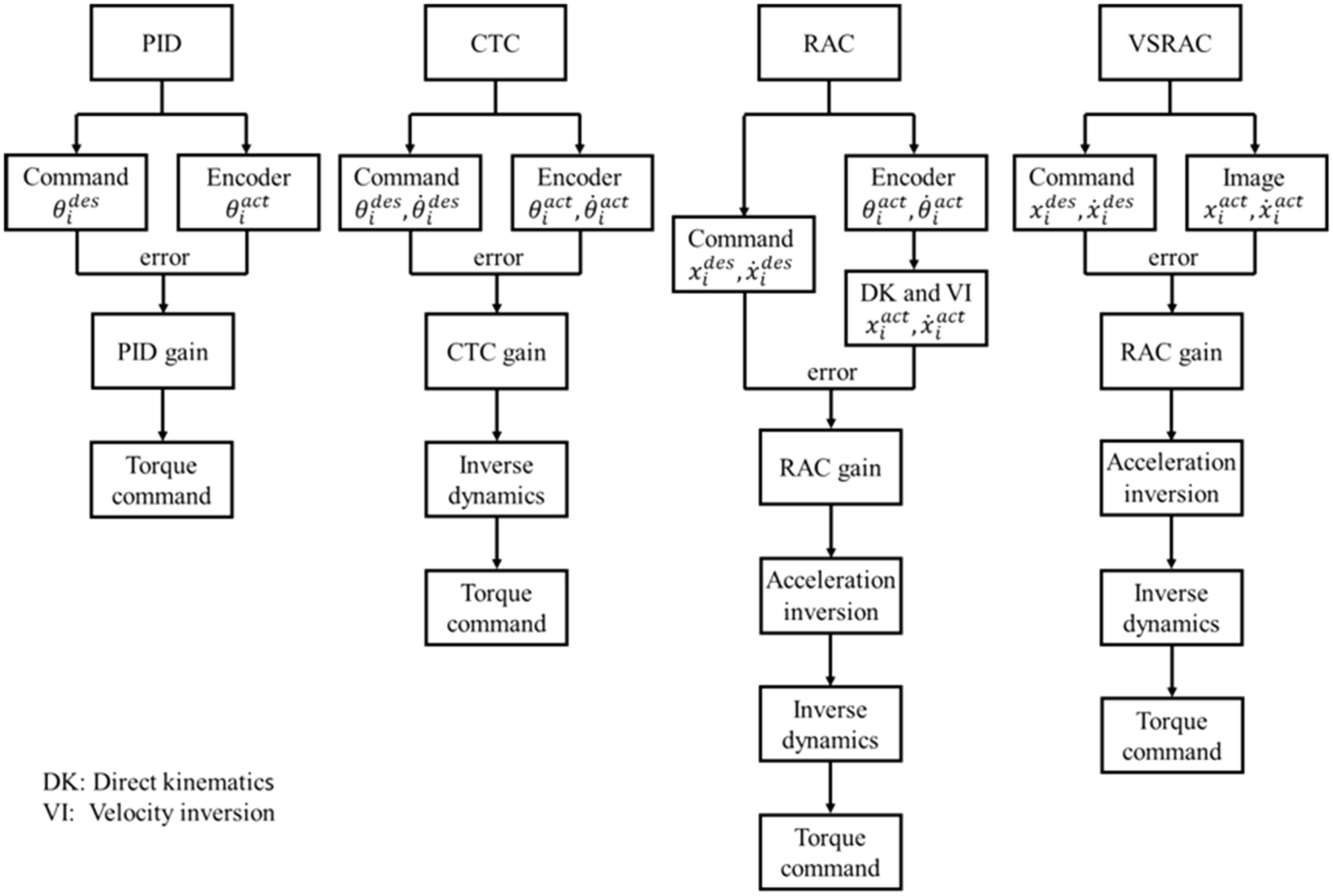
This paper proposes a VSRAC, which is a torque-based control scheme. In order to compare the scheme with other existing torque-based control schemes, this section also presents a PID control, a RAC, and a CTC. A torque-based control scheme usually incorporates the dynamic model of manipulators so as to evaluate the control torques instead of directly using torque sensors to measure the torques, so the input signals of the manipulators are the control torques. For different types of control schemes, the feedback signals can be angles of active links or the position and the orientation of the end-effector, so the sensors will be encoders or cameras, respectively.
In order to perform torque-based control schemes, one introduces the torque control of motors first, followed by three existing torque-based schemes, and then presents a VSRAC scheme.
Torque control of motors
To illustrate the torque-based control, Figure 2 shows the block diagram of the torque control for a single motor, where a desired torque


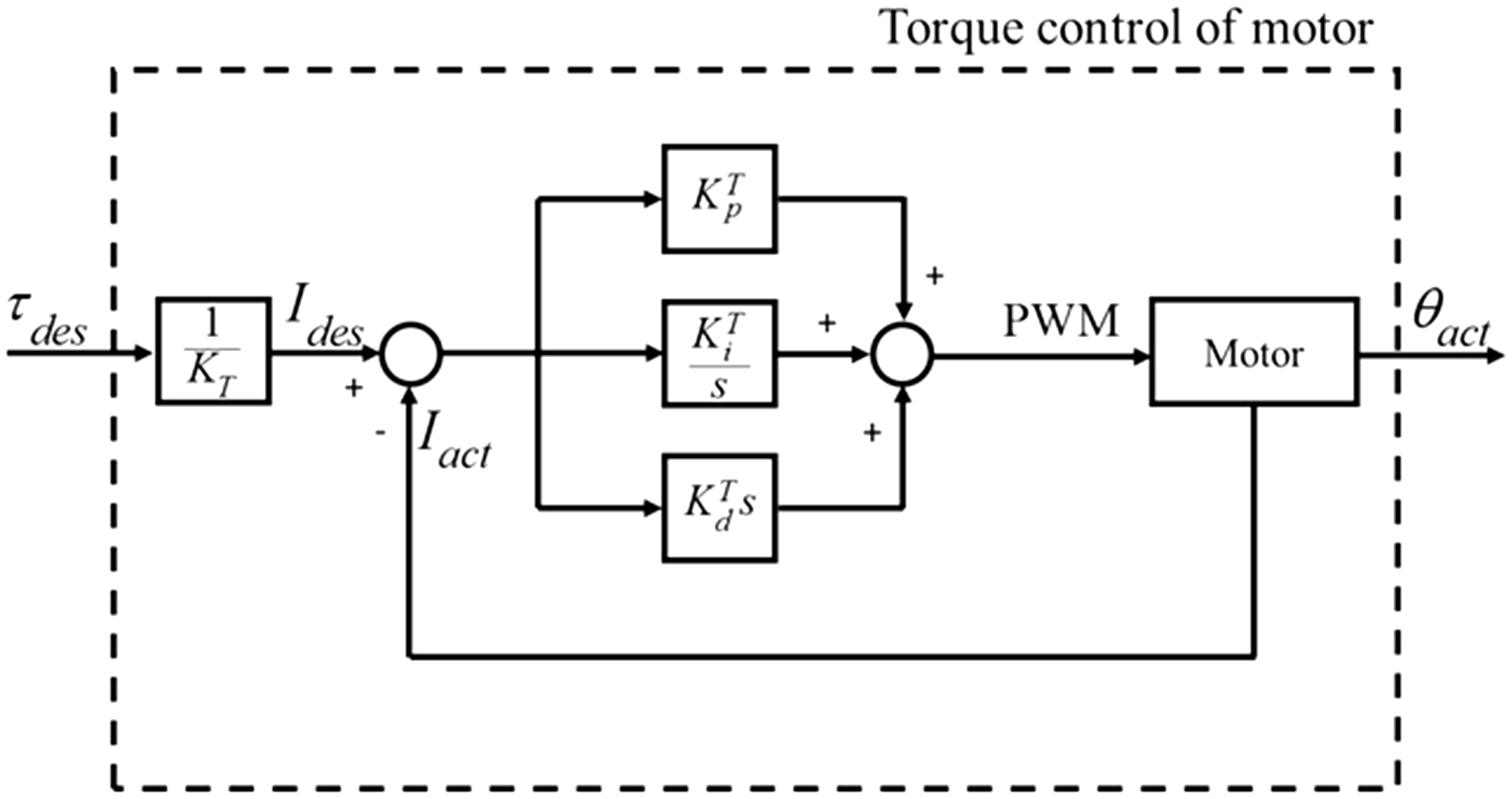
Block diagram of the torque control for a single motor.
Proportional-integral-derivative control
Figure 3 shows the block diagram of a proportional-integral-derivative (PID) control applied to the manipulator, where


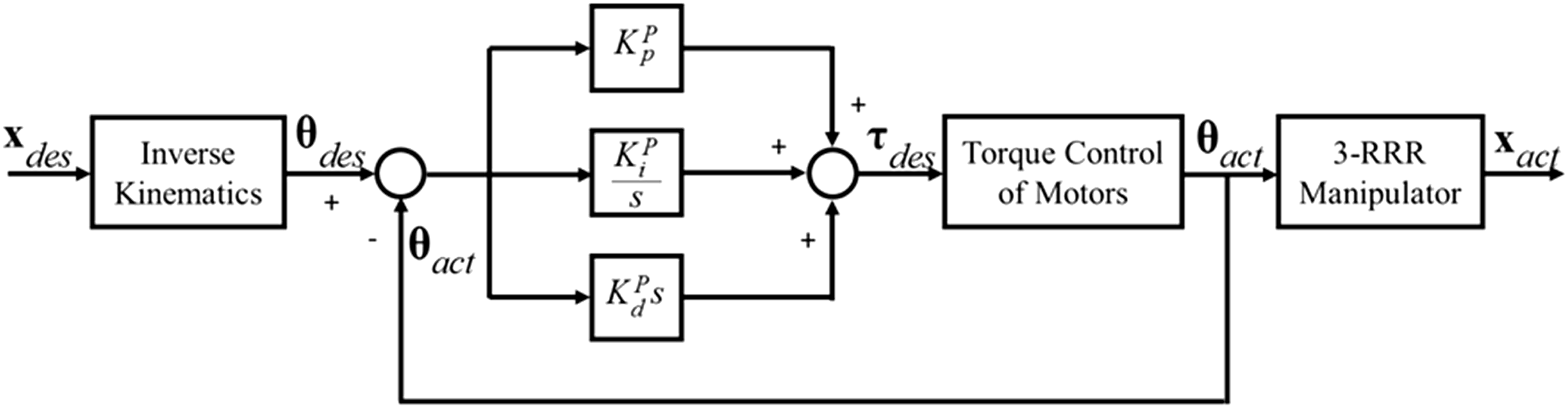
Block diagram of a PID control scheme.
Computed torque control
The CTC regulates the angular accelerations of the motors, so good tracking performances on the motor angles can be expected. To eliminate the nonlinear terms in equation (18), the control torque



Figure 4 shows the block diagram of the CTC. Referring to this diagram, the desired trajectory of the end-effector is generated first, and the reference angular accelerations are obtained by using a PD controller plus the desired angular accelerations. Besides, the inverse dynamics is used to calculate the control torques applied to the manipulator. Since the control scheme uses the motor angles as feedback control signals instead of the position and orientation angle of the end-effector as them, encoders are the only sensors used in this control scheme. It is worth to note that the CTC needs the angular rates of the active angles, and they are calculated by applying a finite difference method to the active angles. In Figure 4, the symbol s represents the differentiation with respect to time and s2 refers to the double differentiation.
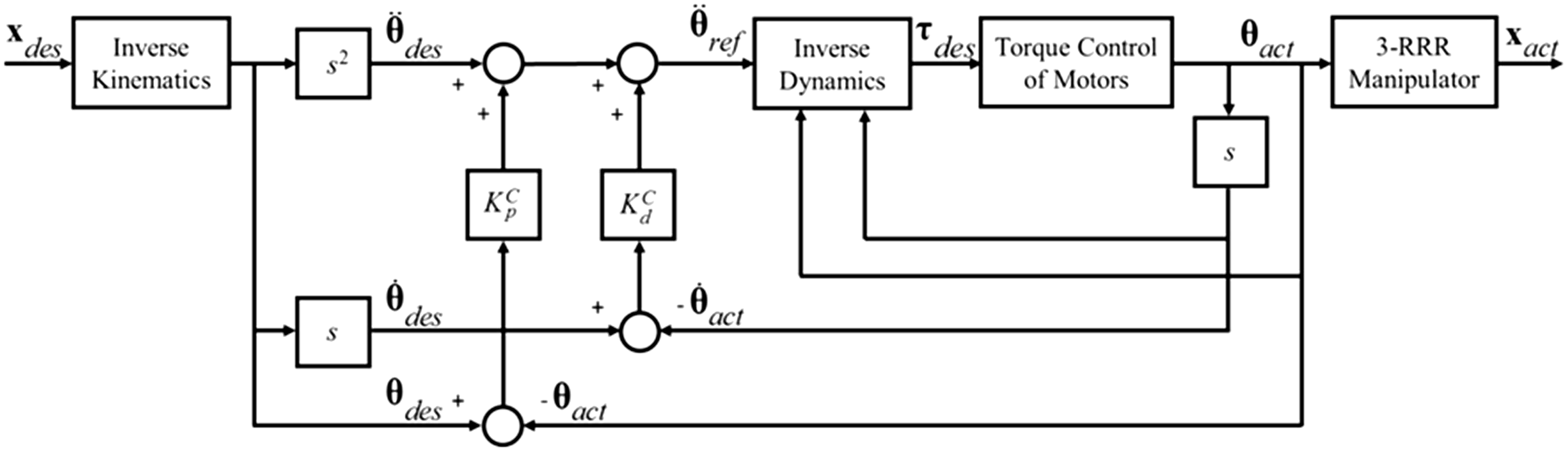
Block diagram of the CTC scheme.
Resolved acceleration control
In contrast to the CTC, the RAC regulates the position and the orientation angle of the end-effector, so the control scheme can provide better control tracking performances on them. To develop the RAC, the control torque

Applying the acceleration inversion in equation (6) into equation (26) yields



To ensure the stability, equation (28) substituted into equation (27) leads to

Figure 5 shows the block diagram of the RAC applied to a manipulator. Referring to the figure, the desired trajectory of the end-effector is generated first based on trajectory planning, and then the reference trajectory is calculated based on a PD controller plus the desired acceleration. Besides, the reference angular accelerations are calculated by applying the inverse dynamics. Since the only sensors are used in the control scheme are encoders, it is necessary to have the actual position and orientation angle of the end-effector by using the direct kinematics and the velocity inversion, which will be feedback control signals in the control scheme.
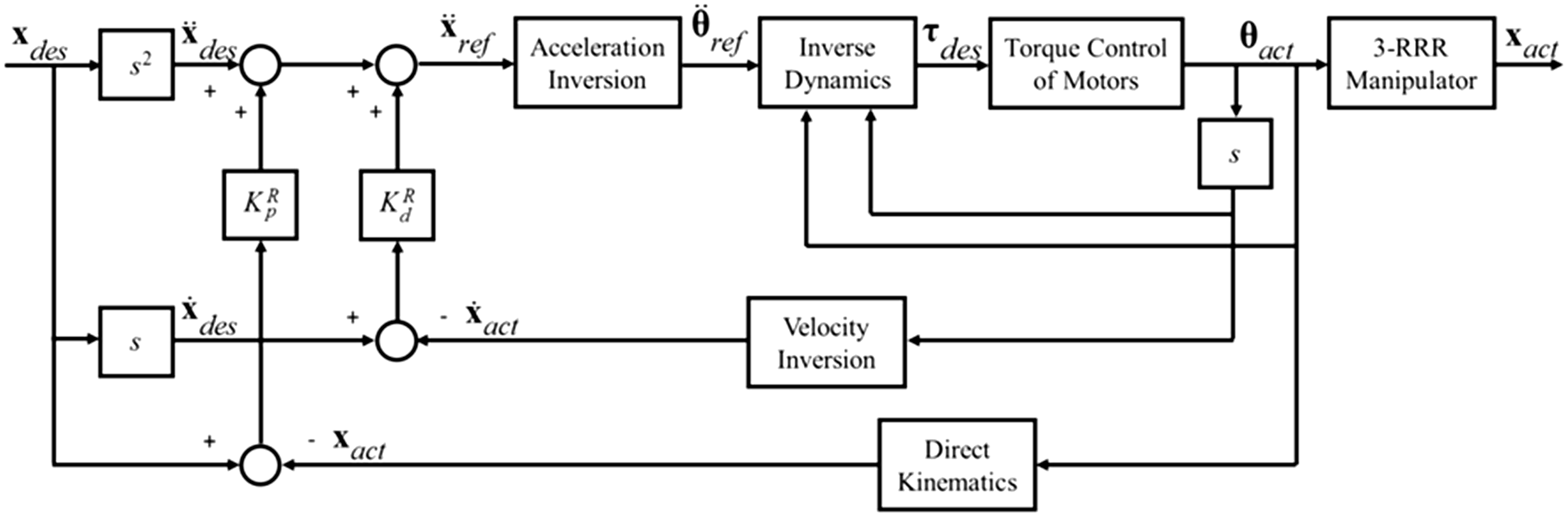
Block diagram of the RAC scheme.
Visual servoing resolved acceleration control
This paper proposes a VSRAC scheme, which can be treated as an extended RAC. Since the RAC regulates the linear and angular accelerations of the end-effector, it is necessary to have its positions and velocities, which can be obtained through direct kinematics and velocity inversion by using the motor angles. There are two major disadvantages in this control scheme. One is that the computational cost increased, and the other one direct kinematics and velocity inversion may not provide accurate position and velocity of the end-effector. To improve the two disadvantages, a camera and image processing techniques are utilized directly to obtain the position and the orientation angle of then-effector.
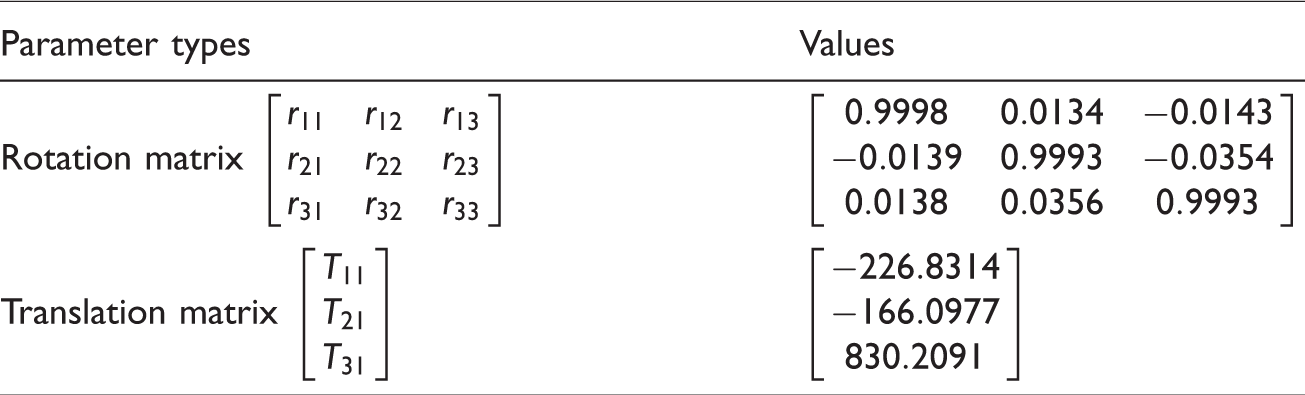
Figure 6 shows the block diagram of the proposed control scheme. The block diagram is similar as one of the RAC except for the direct kinematics and the velocity inversion replaced by a camera and image processing, whose purpose is to acquire the position of the end-effector. Thus, it is necessary to have a camera model, which will be used to calculate the position in three-dimensional space. The relationship between an image frame coordinate system and a global coordinate system as
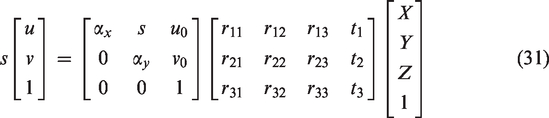
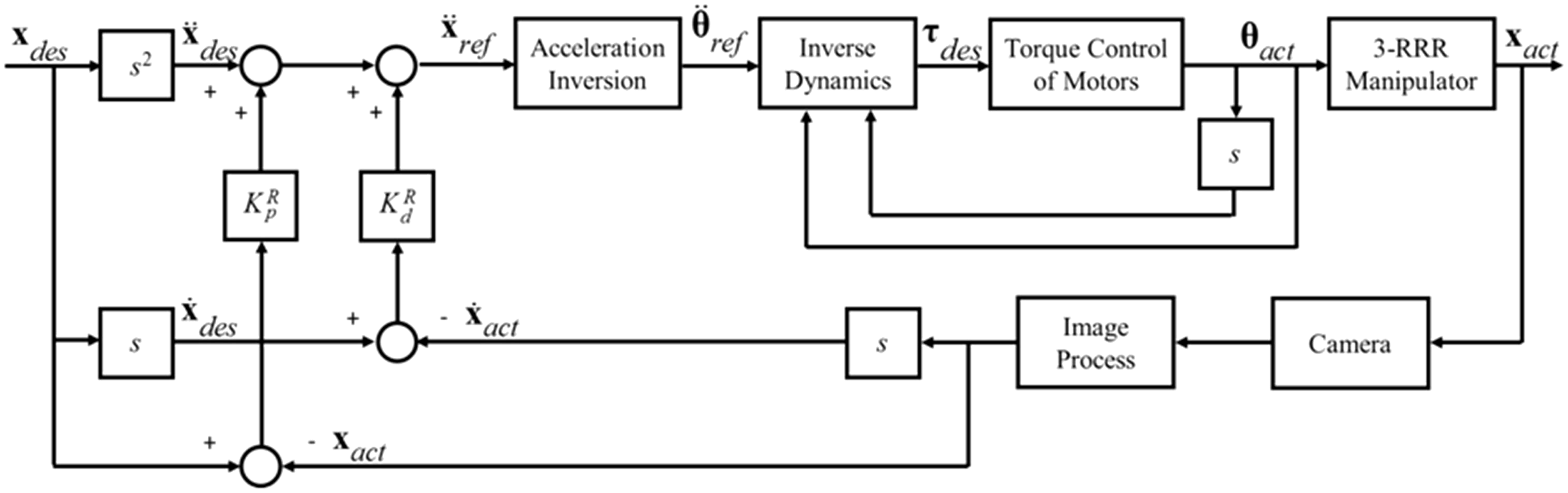
Schematic diagram of the VBRAC scheme.
After capturing the image of the manipulator by a camera, the position of the orientation angle of the end-effector can be obtained by using equation (31), and the velocity can be further calculated through the difference method.
Experimental setup
This section introduces the experimental setup, which will be divided into two subsections, the manipulator and the control system.
The manipulator
The manipulator is shown in Figure 7(a), where the central part (the triangle) is the end-effector, and there are three kinematic chains connect it with the motors, which are fixed on the platform and can be seen in Figure 7(b). Besides, each kinematic chain consists of two links, which are connected by revolute joints.
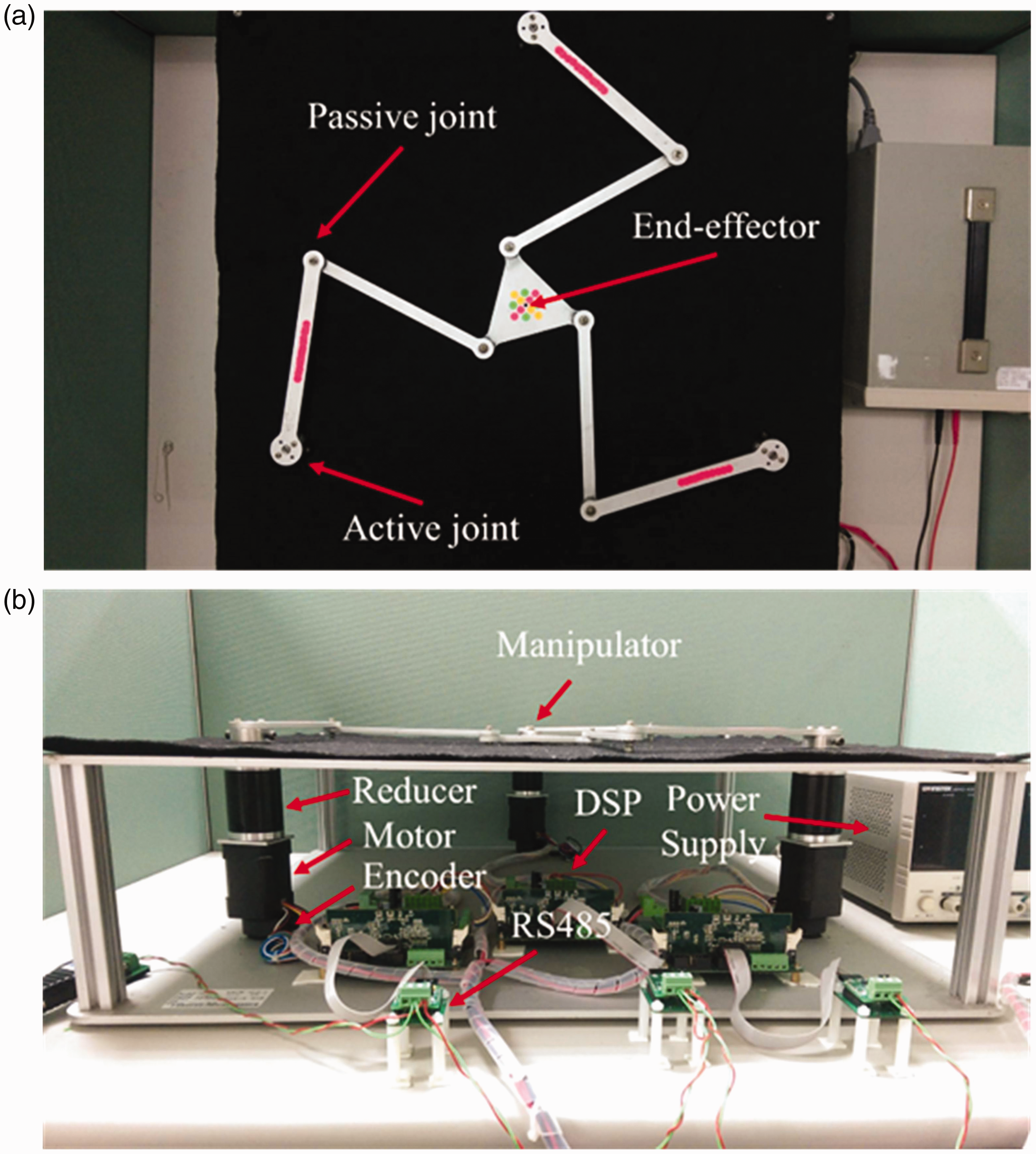
The prototype of the planar 3-DOF parallel manipulator, (a) a top view and (b) a side view. DSP: digital signal processing.
Control system
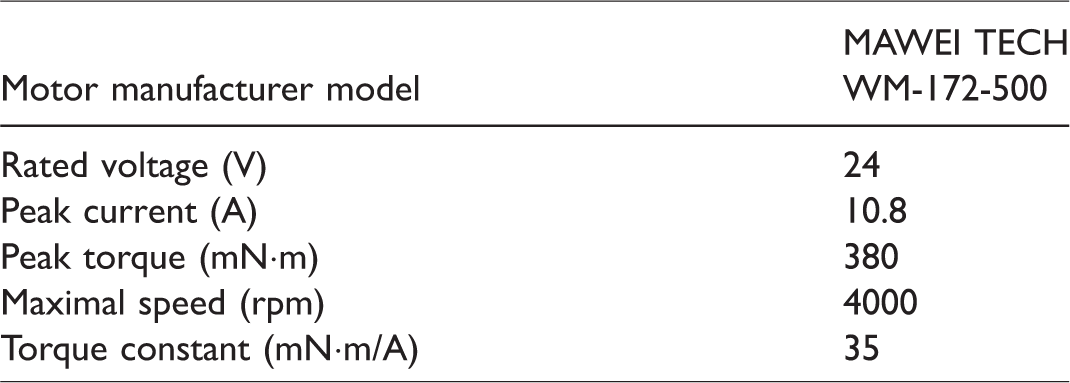
Since this study emphasizes the torque-based control schemes, there is an inner current control loop to facilitate the torque control for each motor. Besides, the motor torque is proportional to the electrical current of the motor, so a desired torque is divided by a torque constant so as to obtain a desired electrical current. The block diagram is shown in Figure 2, where a current sensor is used to sense the motor current and then the signal is fed back to a PID controller, which is embedded in a digital signal processing (DSP). The current sensor uses a resistance with 0.01 Ω, and the sensing precision is ±1%. The manipulator is driven by using three three-phase DC brushless motors, and the motor specifications are listed on Table 1. Three encoders are used to sense the rotating angles of the three motors, and the encoder specifications are listed on Table 2. Based on this table, the accuracy of the encoder is 0.0141°. The entire control block diagrams for the three control schemes have been introduced in “Torque-based control schemes” section. The controller of the manipulator is programmed and stored in a personal computer (PC). The specifications of the DSP and the PC are listed in Table 3, and the calculation functions of both are arranged in Table 4. The entire hardware-in-the-loop diagram is illustrated in Figure 8. The programming language is used in C language.
Motor specifications.
Encoder specifications.

Specifications of the PC and DSP.
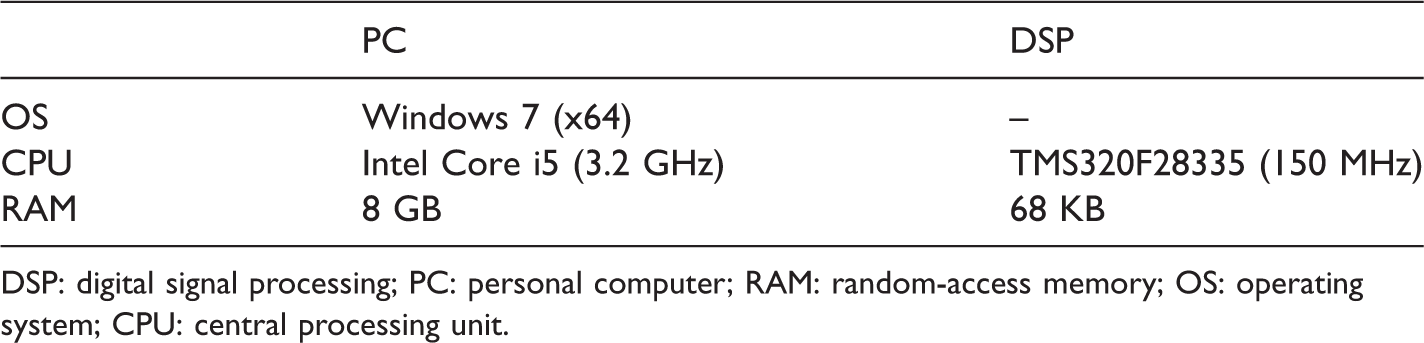
DSP: digital signal processing; PC: personal computer; RAM: random-access memory; OS: operating system; CPU: central processing unit.
Calculation functions of the PC and DSP.
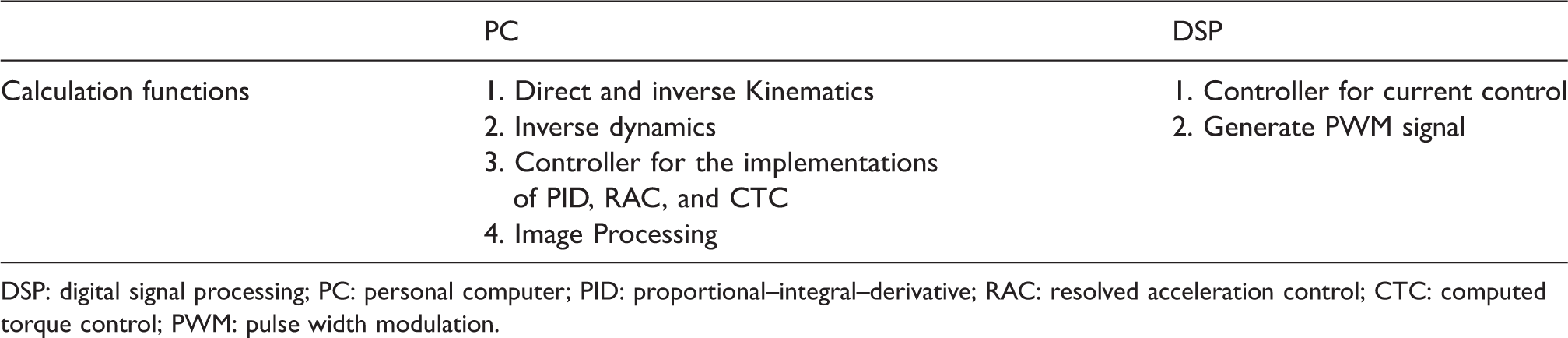
DSP: digital signal processing; PC: personal computer; PID: proportional–integral–derivative; RAC: resolved acceleration control; CTC: computed torque control; PWM: pulse width modulation.
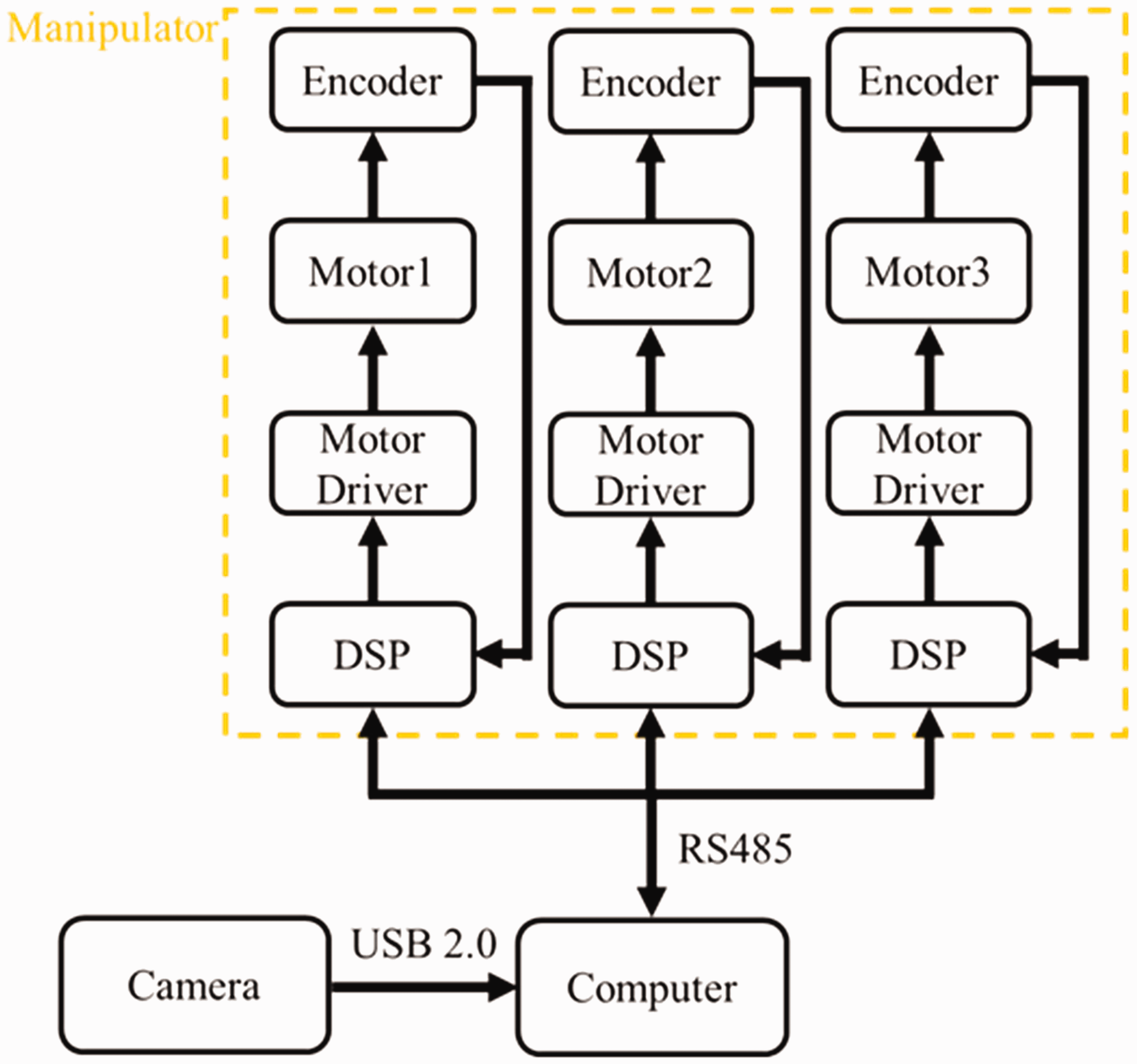
Hardware-in-the-loop diagram. DSP: digital signal processing.
Visual system
The experimental setup is shown in Figure 9, which includes the manipulator and a camera. The camera is mounted right above the manipulator in order to capture the entire image of the manipulator, so the distance between them is set as 81 cm. The camera is made by Logitech Ltd., and the camera type is HD Webcam C615. The resolution is 1920 × 1080, and the maximum frame rate is 60 Hz.
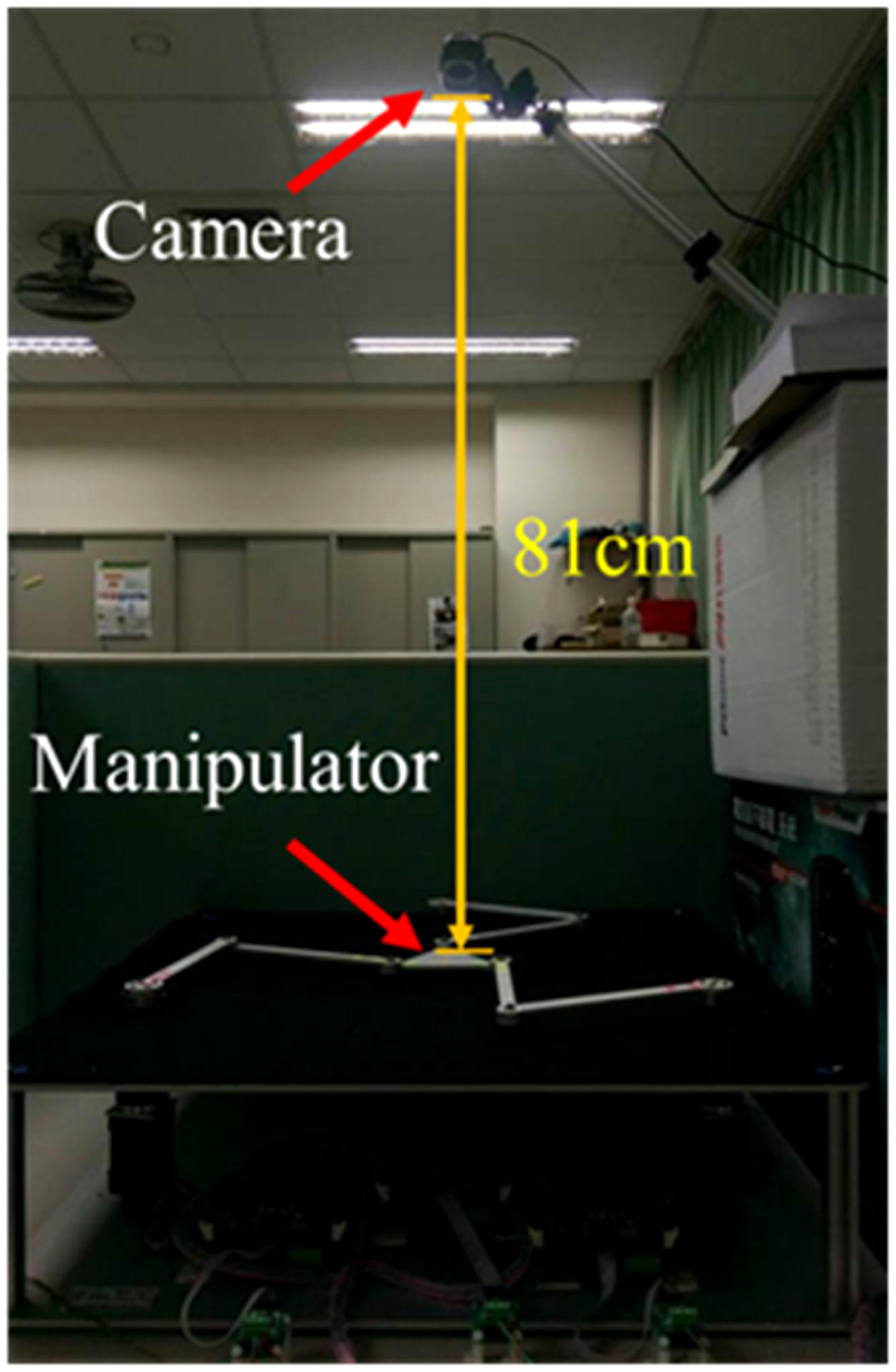
Experimental setup of the 3-DOF planar parallel manipulator and the camera.
Graphical user interface
This study also develops a graphical user interface which shows the image of the manipulator and the positions of the end-effector and the active and passive links in real time, where the positions are obtained by using some image processing techniques, and the interface is developed by using C language. Figure 10 shows the procedure of performing some image processing techniques to identify a feature point on an image, where the feature point refers to a small red round sticker attached on the center of the end-effector of the manipulator. There are four steps in this procedure. The first one is to obtain the image of the entire manipulator by using a CCD. The second step is to identify the feature point. The third step is erosion, which eliminates noises of background image. The last step is dilation, which forms a fully solid circle. To locate the coordinate of the feature point, the formulas of the center of area is utilized and shown as

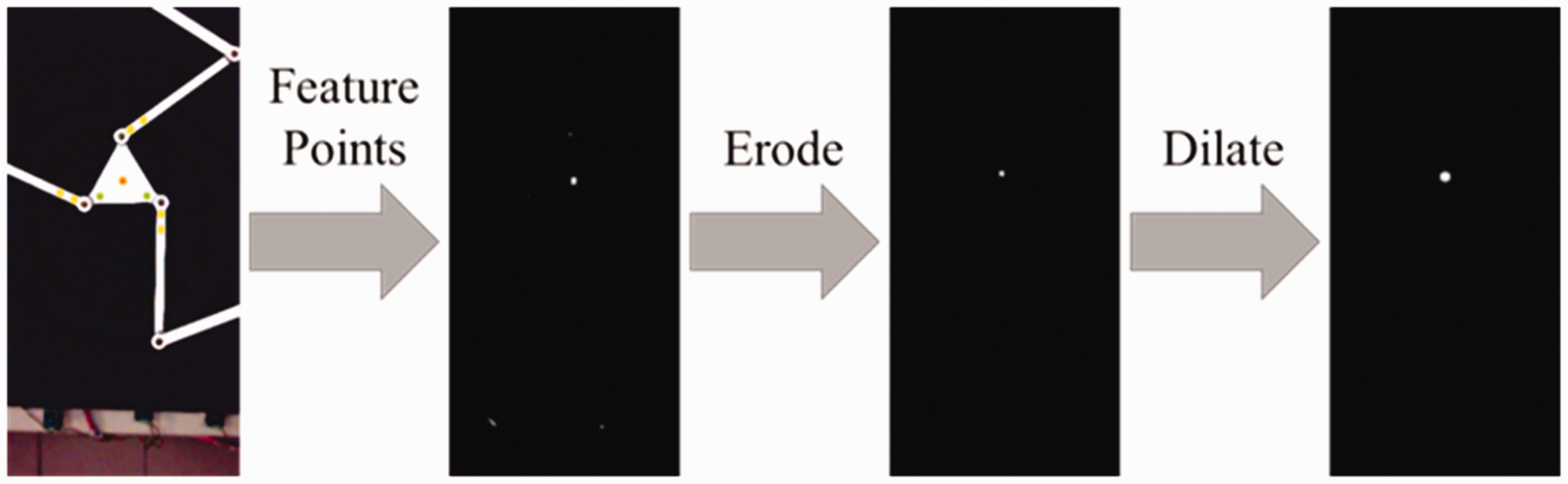
Feature point capture process.
Based on the aforementioned procedure to determine the coordinate of a feature point, the other points can be located to determine the origin, the coordinate systems, and the points on the active and passive links shown in Figure 11, and then the vectors representing the active and passive link can be obtained. Furthermore, the rotating angles of the active and passive links can be determined through vector operation. Figure 12 shows the developed graphical user interface, which includes the image of the entire manipulator, the results by performing image processing, and the positions and the angles of all components of the manipulator.
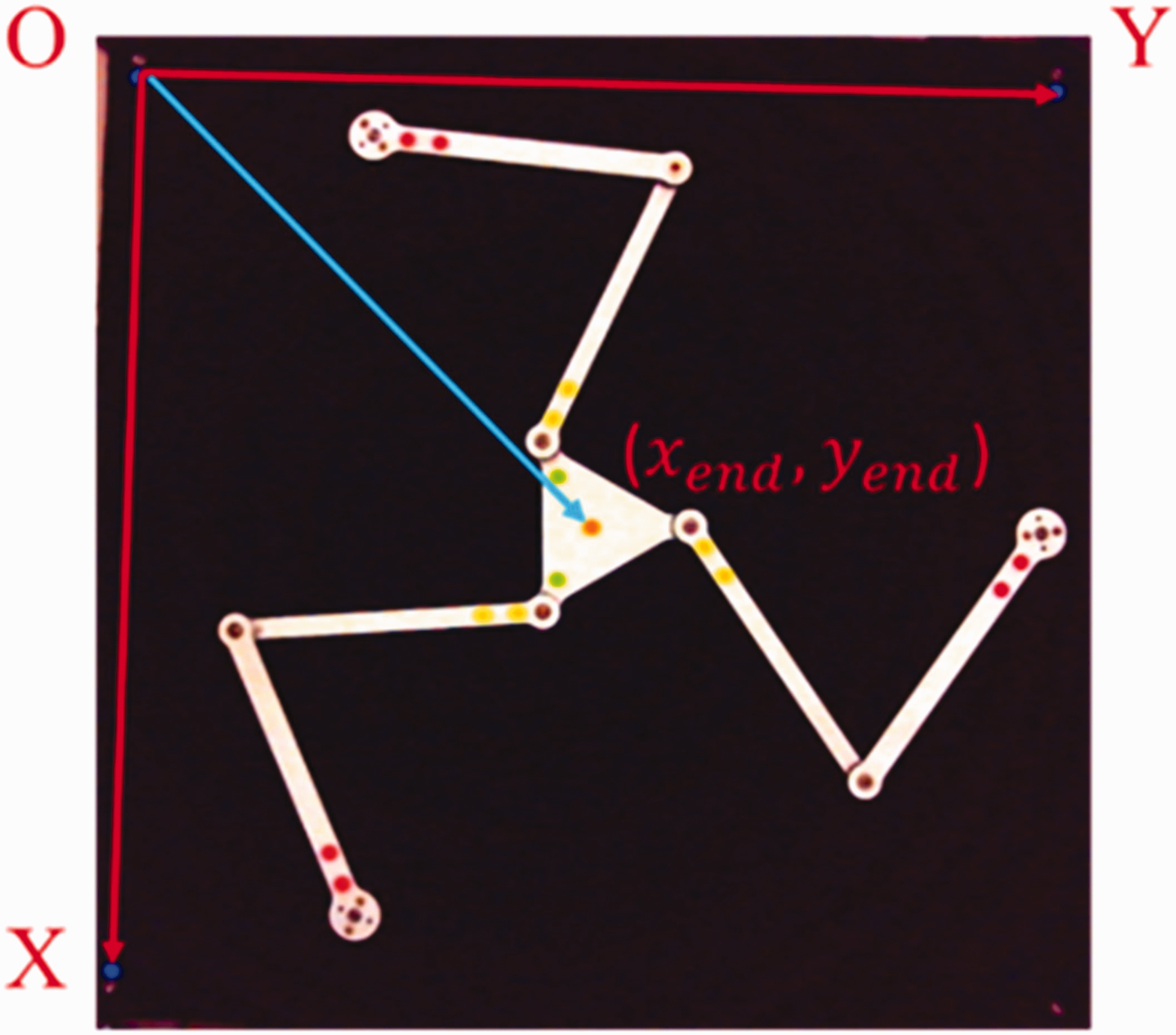
Identification of feature points on the manipulator.
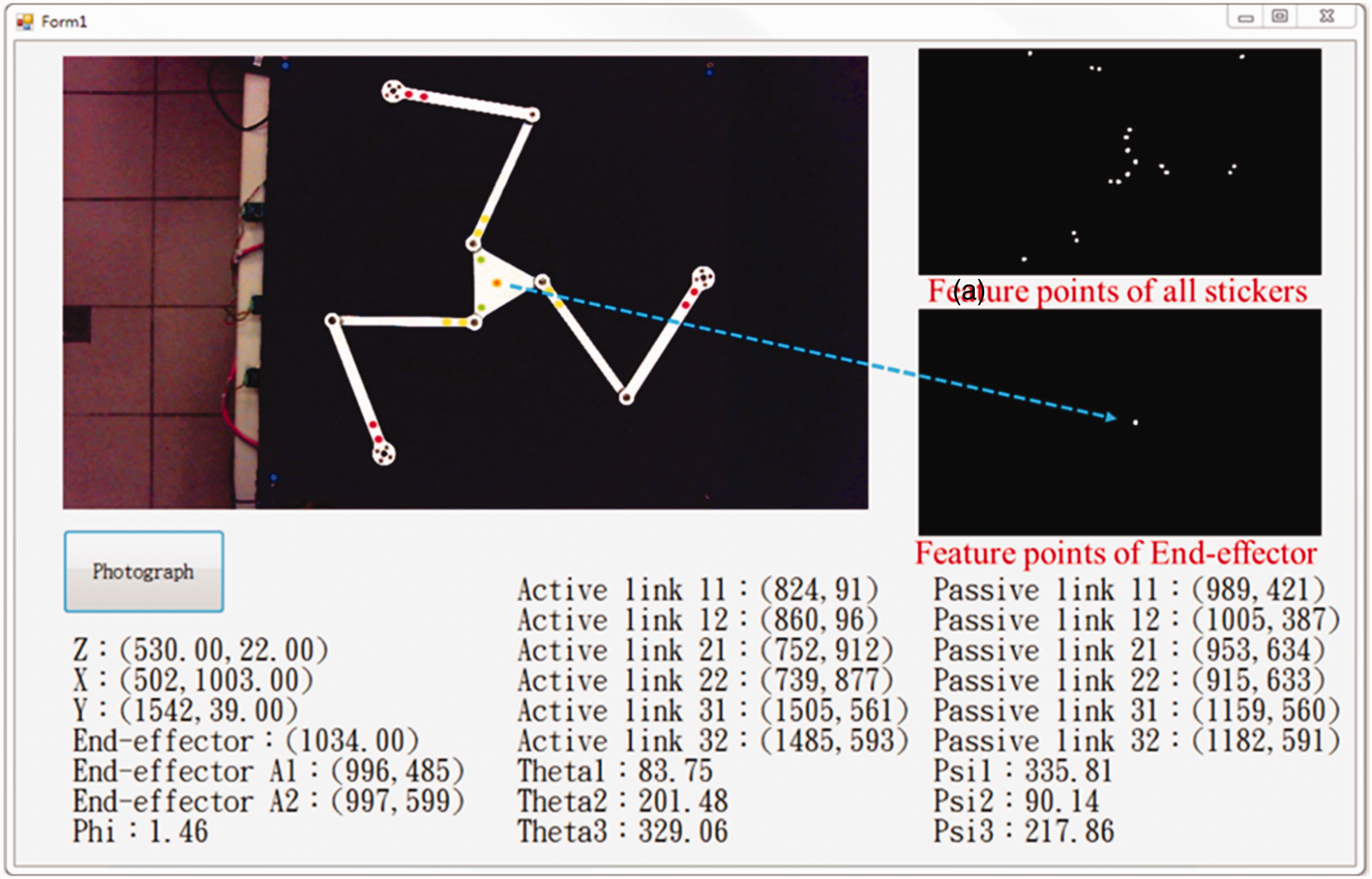
Image processing interface.
Simulation and experimental results
This section presents the simulation and experimental procedures, the system and control parameters, and the simulation and experimental results by exploring four controllers shown in “Torque-based control schemes” section.
Simulation and experimental procedure
The experimental process is the first to design the trajectory. The desired trajectory of the end-effector is defined as
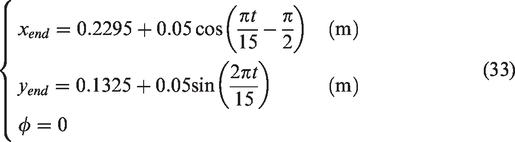
Thus, the x- and y-directional translation motions of the end-effector are, respectively, kept within
Flow charts of the control experiments. PID: proportional–integral–derivative; RAC: resolved acceleration control; CTC: computed torque control; VSRAC: visual servoing resolved acceleration control scheme.
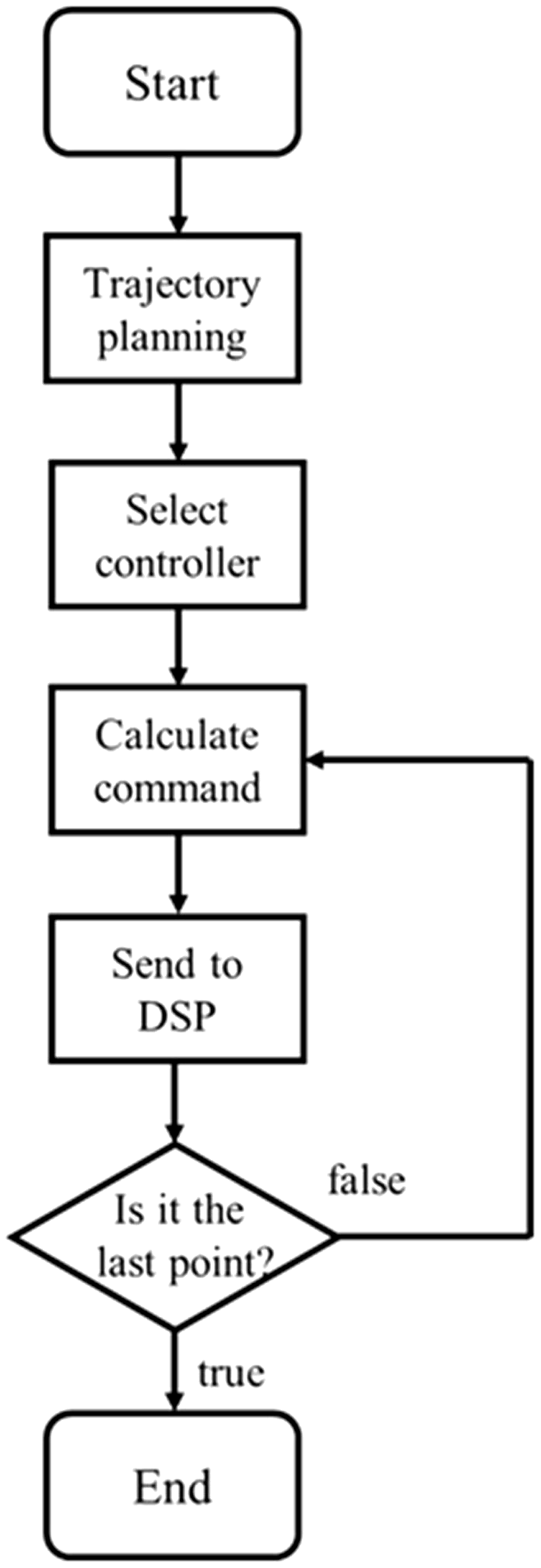
Flow chart of program codes. DSP: digital signal processing.
System and controller parameters
The link parameters of the manipulators are listed in Table 5, and the end-effector is an equilateral triangle with 0.1039 m side length and active angles are separated by 0.459 m from each other. Based on the models and the control schemes, respectively, presented in “A 3-DOF planar parallel manipulator” and “Torque-based control schemes” sections, one uses the software Matlab to perform numerical simulations in order to obtain the controller gains listed in Table 6, where the gain
Manipulator parameters.

Controller gains.
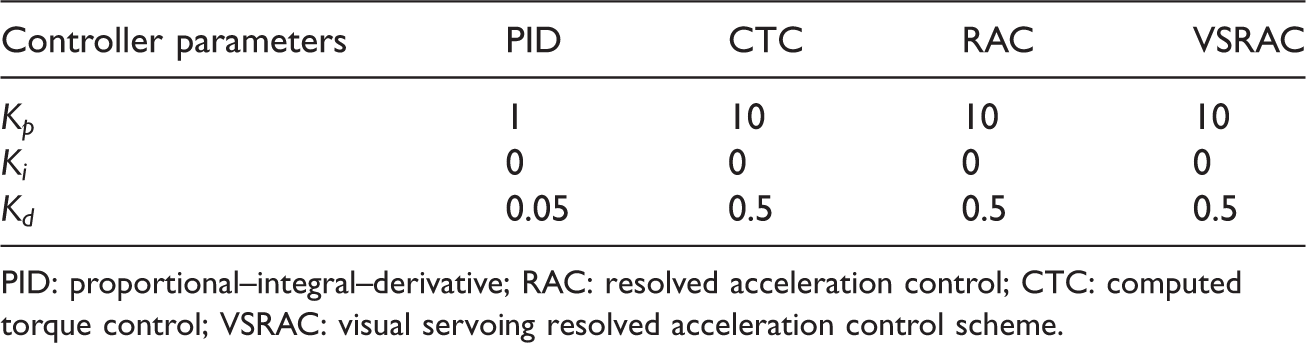
PID: proportional–integral–derivative; RAC: resolved acceleration control; CTC: computed torque control; VSRAC: visual servoing resolved acceleration control scheme.
Intrinsic parameters of the camera model.

Extrinsic parameters of the camera model.
Simulation results
This subsection presents the simulation results by using only the three control schemes except for the VSRAC, because it needs images captured by a camera. Figure 15 shows the results using the PID control, where Figure 15(a) shows the trajectories of the command and the simulation results for the end-effector of the manipulator and Figure 15(b) shows the trajectory error as a function of time. The results show that both the trajectories of the command and the simulation results are very close in Figure 15(a). However, by examining the error, it indicates the error reaches 1.3 × 10−3 m in the beginning, but it reduces as 1.0 × 10−4 m after that. Figure 16 shows the results using the CTC control, where Figure 16(a) shows the trajectories of the command and the simulation results for the end-effector of the manipulator, and Figure 16(b) shows the trajectory error as a function of time. The results show that both the trajectories of the command and the simulation results are slightly different in Figure 16(a), and the error response is oscillating and decaying as time increases. The error reduces around from 7 × 10−3 to 2 × 10−3 m. Figure 17 shows the results using the RAC control, where Figure 17(a) shows the trajectories of the command and the simulation results for the end-effector of the manipulator and Figure 17(b) shows the trajectory error as a function of time. The results show that both the trajectories of the command and the simulation results are slightly different in Figure 17(a), and the error response is oscillating and decaying as time increases. The error reduces around from 7 × 10−3 to 2 × 10−3 m. To compare the results, Table 9 lists the errors by using the three control schemes, where the error of the trajectory is defined as

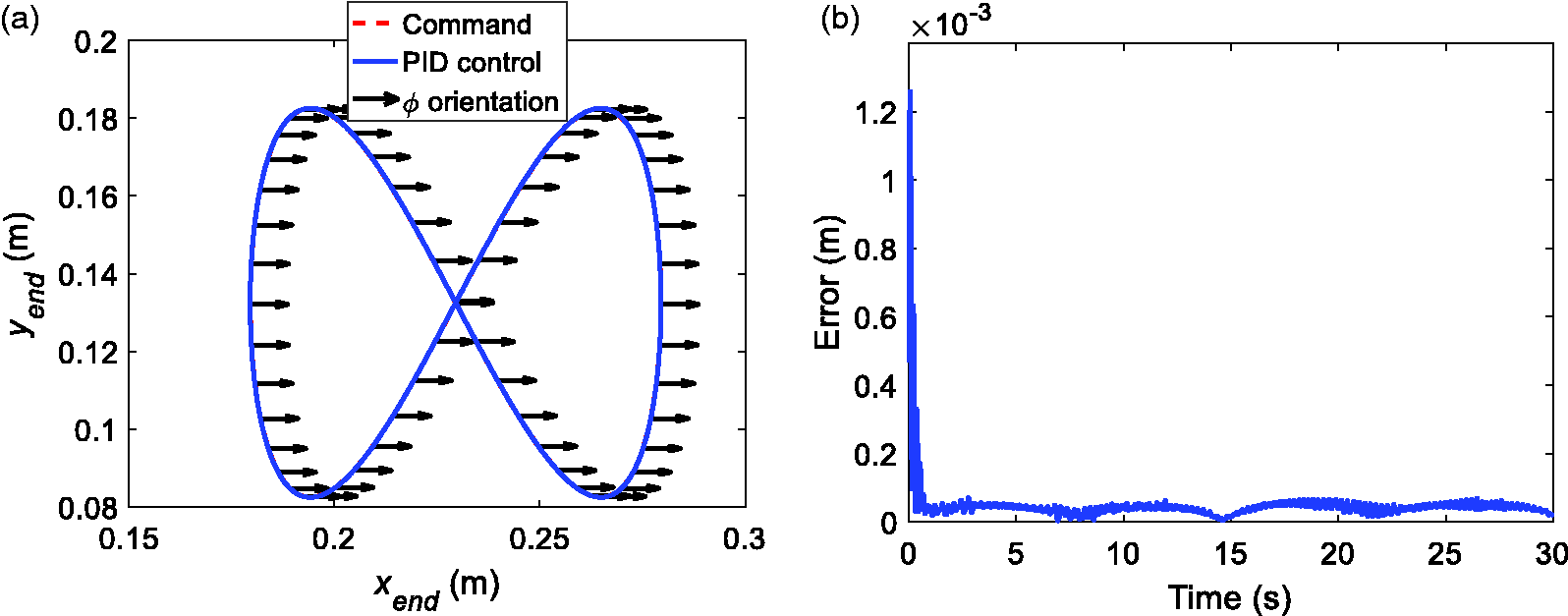
Simulation results of the end-effector trajectory by using the PID scheme: (a) the moving trajectory and (b) the error response. PID: proportional–integral–derivative.
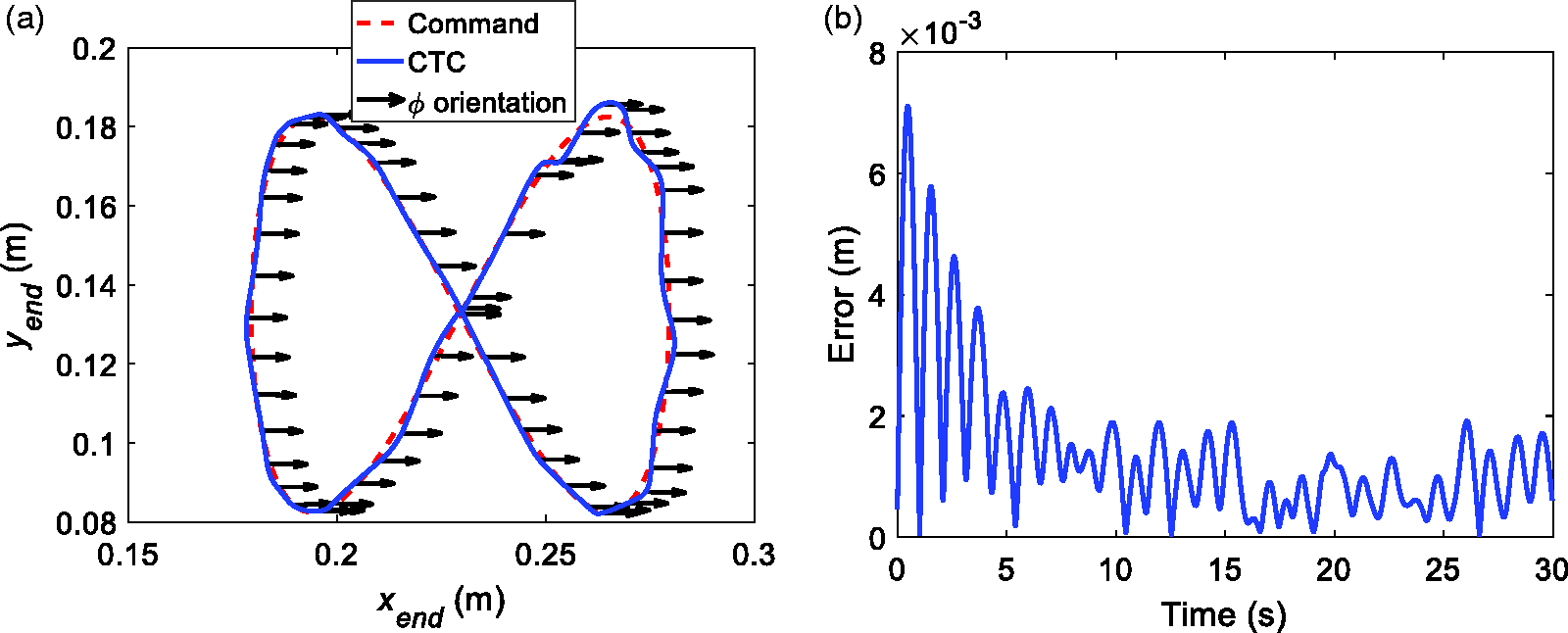
Simulation results of the end-effector by using the CTC scheme: (a) the moving trajectory and (b) the error response. CTC: computed torque control.
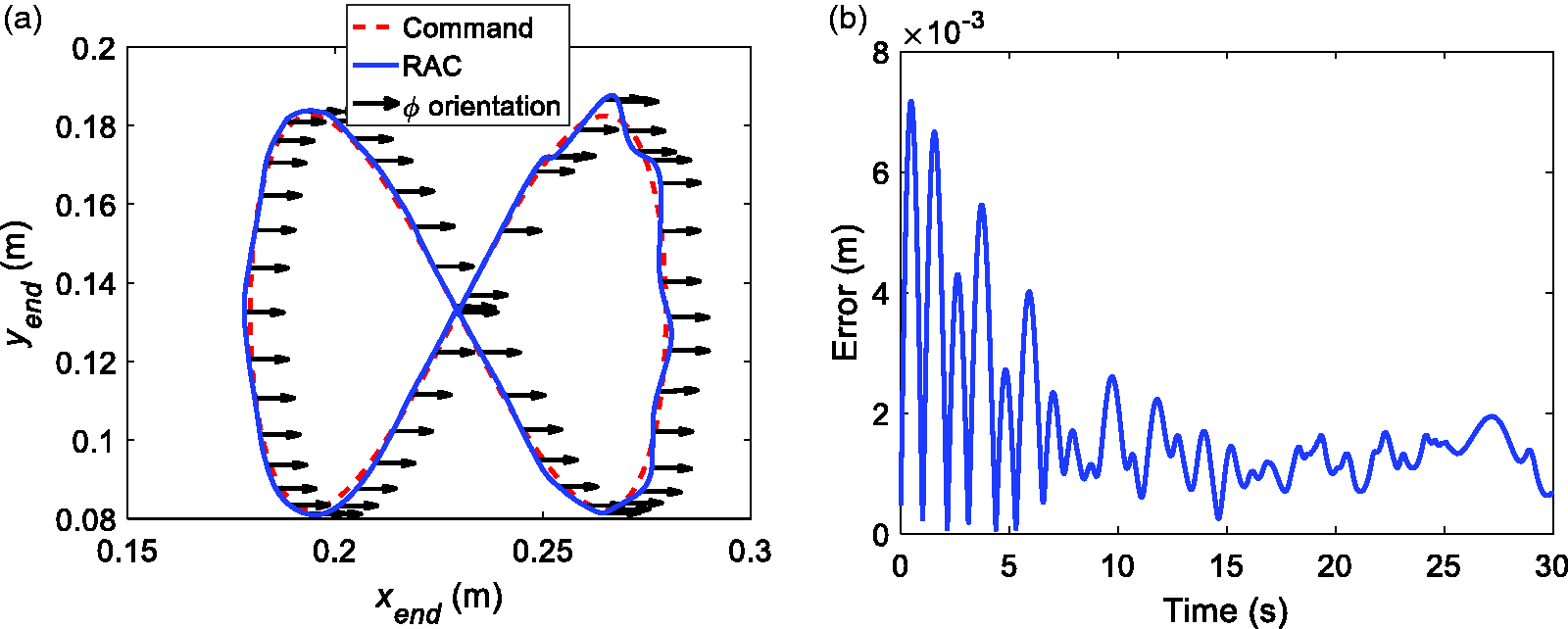
Simulation results of the end-effector by using the RAC scheme: (a) the moving trajectory and (b) the error response. RAC: resolved acceleration control.
RMS errors of the simulation results.
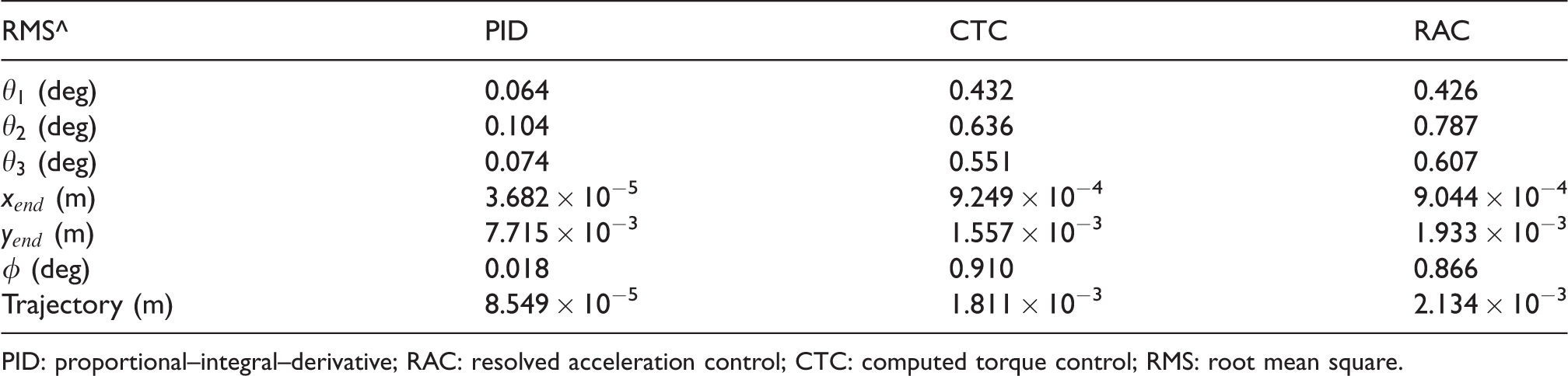
PID: proportional–integral–derivative; RAC: resolved acceleration control; CTC: computed torque control; RMS: root mean square.
Experimental results
This subsection presents the experimental results by using the proposed VSRAC and the results are compared with those by using the other three control schemes. Figure 18 shows the results using the PID control, where Figure 18(a) shows the trajectories of the command and the experimental results for the end-effector of the manipulator and Figure 18(b) shows the trajectory error as a function of time. The results show that both the trajectories of the command and the experimental results are not exactly consistent in Figure 18(a), and the maximum error range is around 0.025 m during the moving period. Figure 19 shows the results using the CTC scheme, where Figure 19(a) shows the trajectories of the command and the experimental results for the end-effector of the manipulator and Figure 19(b) shows the trajectory error as a function of time. The results show that both the trajectories of the command and the experimental results are not exactly consistent in Figure 19(a), and the maximum error is around 0.025 m during the moving period. The results are similar to those by using the PID control. Figure 20 shows the results using the RAC scheme, where Figure 20(a) shows the trajectories of the command and the experimental results for the end-effector of the manipulator and Figure 20(b) shows the trajectory error as a function of time. The results show that both the trajectories of the command and the experimental results are not exactly consistent in Figure 20(a), and the maximum error is around 0.020 m during the moving period. The errors are little smaller than those by using the PID and CTC schemes. Figure 21 shows the results using the proposed VSRAC scheme, where Figure 21(a) shows the trajectories of the command and the experimental results for the end-effector of the manipulator, and Figure 21(b) shows the trajectory error as a function of time. The results show that both the trajectories of the command and the experimental results are exactly consistent in Figure 21(a), and the maximum error is around 0.017 m during the moving period. The error is much smaller than those by using the other schemes.
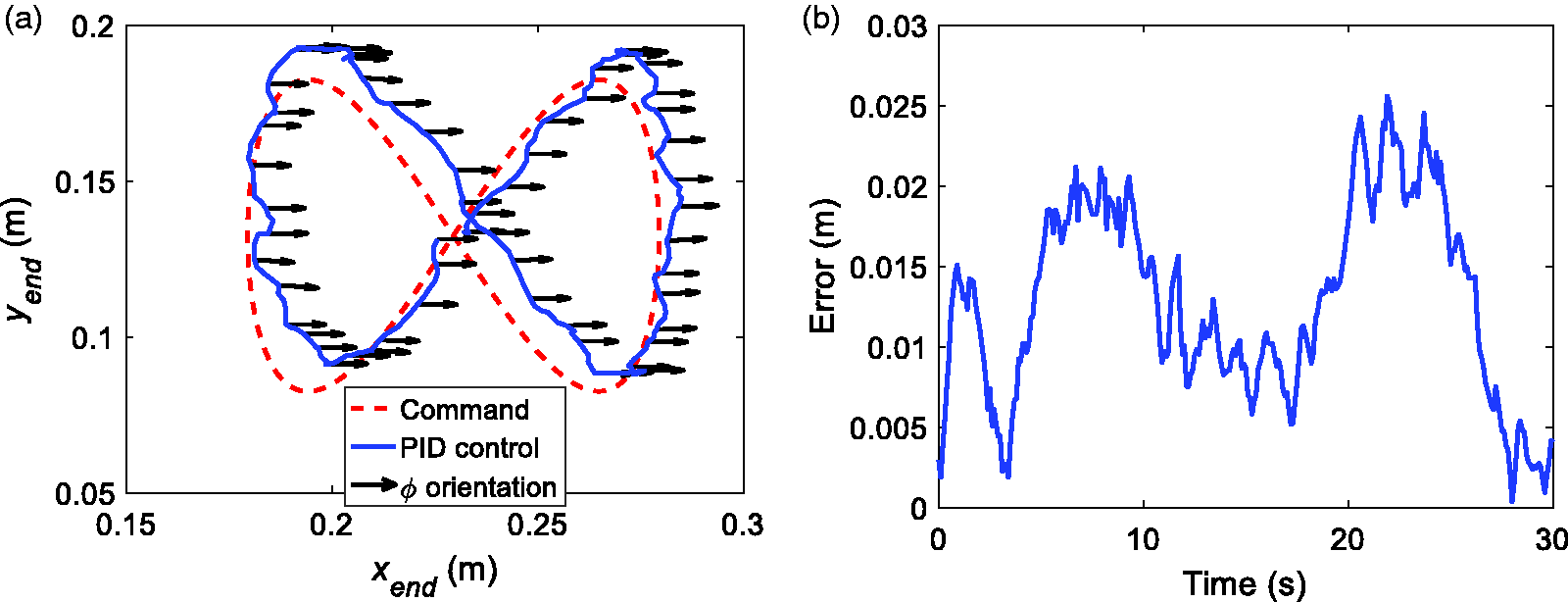
Experimental results of the end-effector by using the PID control: (a) moving trajectory and (b) error response. PID: proportional–integral–derivative.
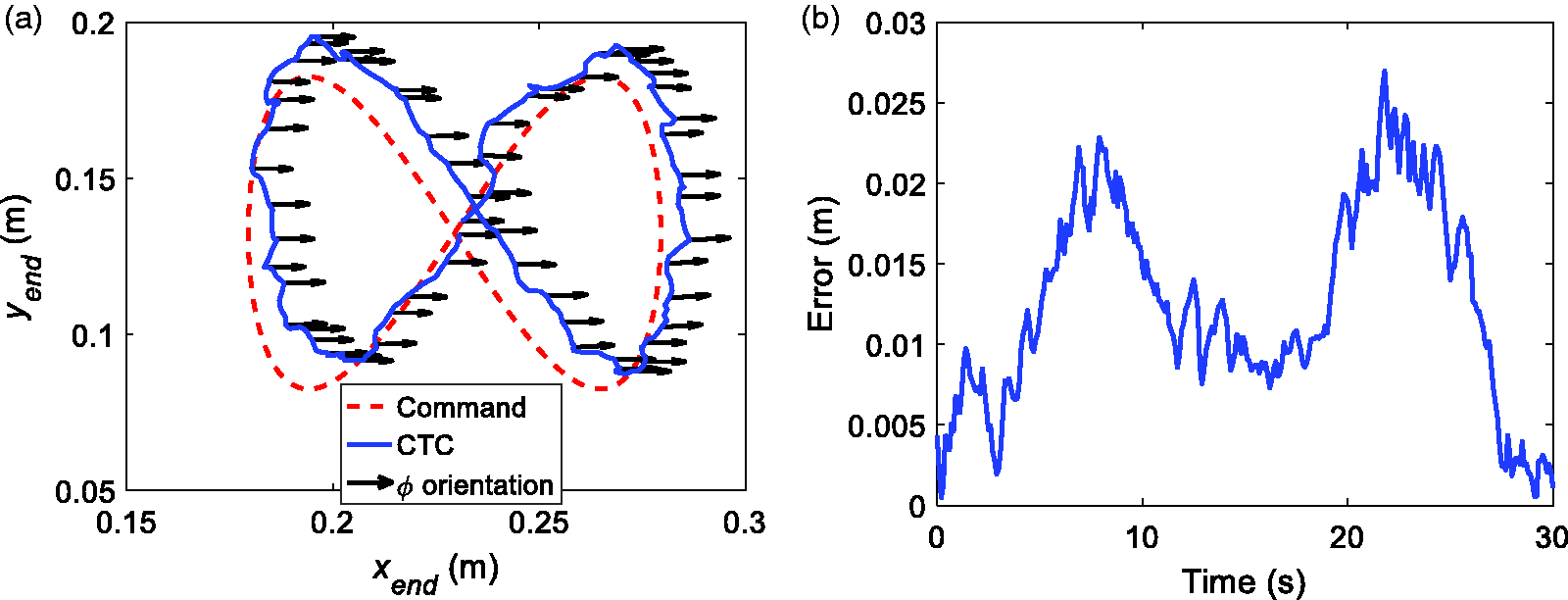
Experimental results of the end-effector by using the CTC scheme: (a) the moving trajectory and (b) the error response. CTC: computed torque control.
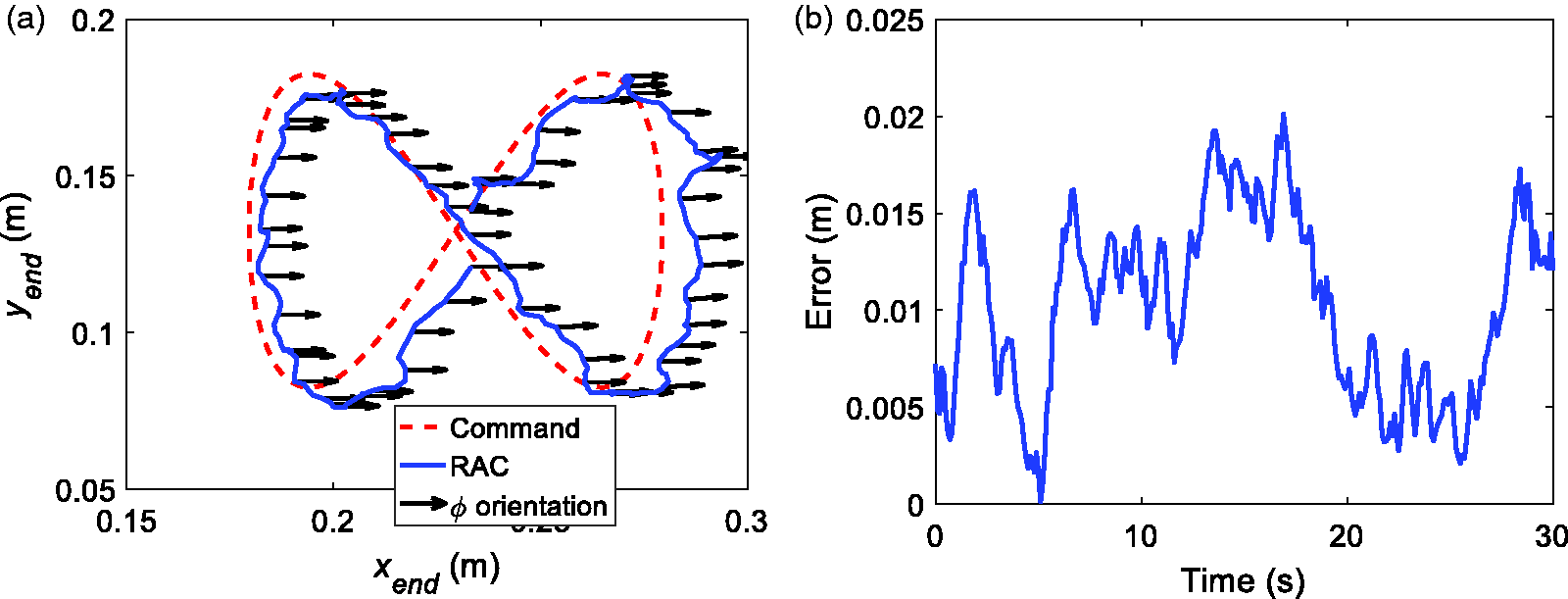
Experimental results of the end-effector by using the RAC scheme: (a) the moving trajectory and (b) the error response. RAC: resolved acceleration control.
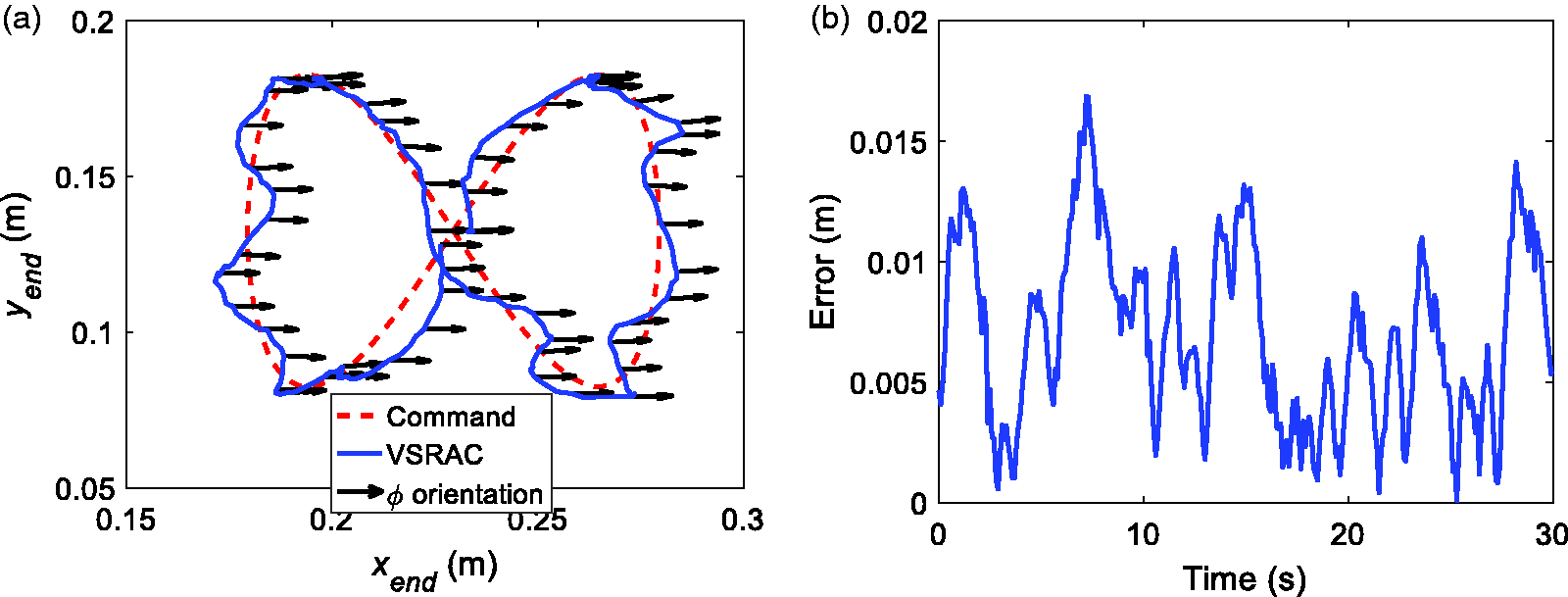
Experimental results of the end-effector by using the VSRAC scheme: (a) the moving trajectory and (b) the error response. VSRAC: visual servoing resolved acceleration control scheme.
To compare the four schemes, Table 10 lists several root mean square (RMS) errors, where the errors of the active angles θi are the differences between the command signals and the encoder values, and the errors of the end-effector are the differences between the command signals and the values through image processing. The results show that the proposed VSRAC provides the smallest errors on the trajectory tracking of the end-effector. The CTC scheme is better than the RAC scheme on the tracking of motor angles, because the CTC regulates the angular accelerations of the motor angles. Besides, the PID control does not need the manipulator dynamics, which causes the largest tracking error to compare with the other three schemes. To compare the simulation and experimental results, it is obvious to note that the tracking performances of the experiments are worse than those of the simulations, because there are some factors affecting the tracking performances, such as the manufacturing inaccuracy of the experimental platform, the motor accuracy due to the backlashes, and the accuracy of the encoders and the current sensors, and the capabilities of the DSP dealing the calculations and data transmissions. To further investigate the four schemes, Table 11 lists their required calculation tasks and the computation time. The results show that the PID control does not carry out the calculations of the inverse dynamics, which causes the less computation time. The RAC scheme needs the most tasks on the calculations, so it needs the most computation time. The CTC needs to calculate the inverse dynamics and the inverse kinematics, so its computation time is less that of the RAC scheme. The proposed VSRAC uses a camera and some image processing techniques to directly obtain the position and the orientation angle of the end-effector instead of using the velocity and acceleration inversions. Thus, this reduces computation time to compare with the RAC scheme, and the more accurate positions and the orientation angle of the end-effector can be obtained. Based on the hardware specifications used in the VSRAC experiments, the sampling frequencies of the inner and outer loops are 10 and 60 Hz.
RMS errors of the experiments.
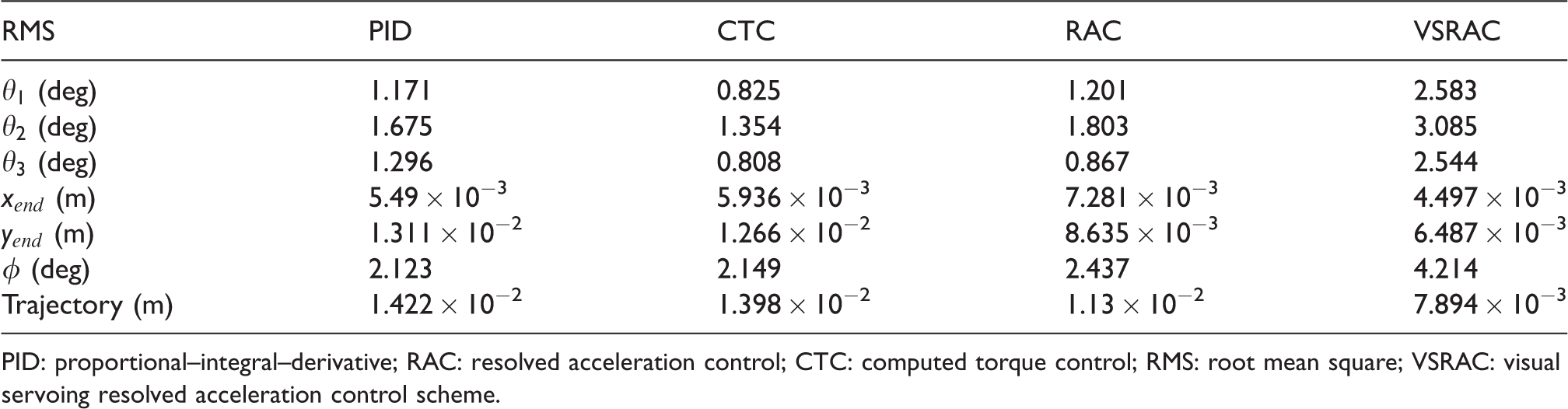
PID: proportional–integral–derivative; RAC: resolved acceleration control; CTC: computed torque control; RMS: root mean square; VSRAC: visual servoing resolved acceleration control scheme.
Comparisons of control schemes.
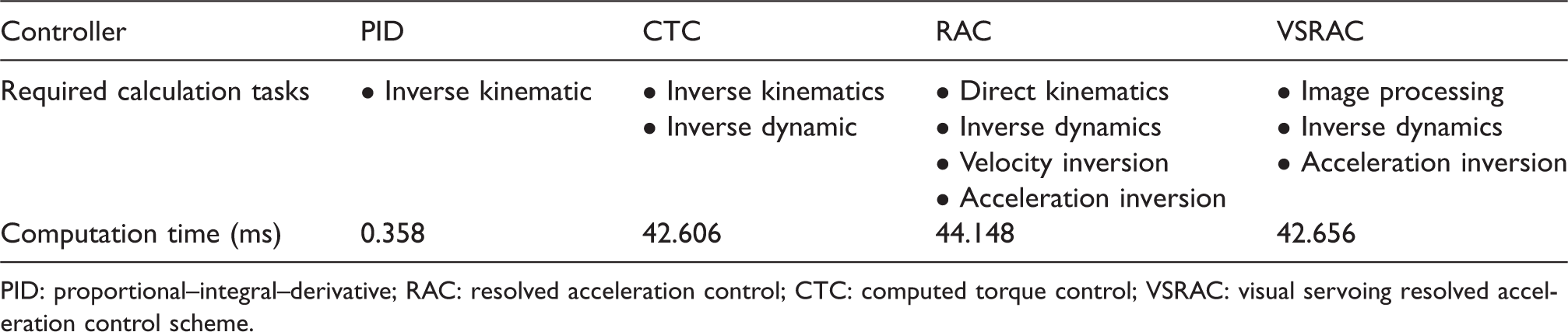
PID: proportional–integral–derivative; RAC: resolved acceleration control; CTC: computed torque control; VSRAC: visual servoing resolved acceleration control scheme.
Conclusions
This paper presents a VSRAC scheme, which regulates the accelerations of the position and the orientation angle of the end-effector by imposing a visual servo approach. Besides, this scheme is applied to a 3-DOF planar parallel manipulator, and the control performances are compared with those by applying three existing schemes. To compare with the RAC scheme, the proposed scheme utilizes a camera and some image processing techniques to directly obtain the position and the orientation angle of the end-effector instead of calculating the direct kinematics and the velocity inversion, so the computation time is reduced. Besides, directly having the position and the orientation angle through image processing can acquire more accurate values than an indirect approach by the direct kinematics, because there might be some errors caused by the motors and the manipulator mechanism. Furthermore, due to the derivation complexity of the dynamic models of parallel manipulators, an approach is proposed by imposing the Jacobian matrices relating the passive and active links into the Euler-Lagrange’s equation. Both numerical simulation and experimental validations are performed for the proposed scheme applied to the manipulator. The experimental results show that the tracking errors of the end-effector are smaller than those by applying other schemes, and the computation time is smaller than that by applying the RAC scheme.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was supported in part by the Ministry of Science and Technology, Taiwan, under Grant MOST 106‐2221‐E‐011‐085.