
Abstract
In this paper, the dynamic response of a piecewise linear single-degree-of-freedom oscillator with fractional-order derivative is studied. First, a mathematical model of the single-degree-of-freedom system is established, and the approximate steady-state solution associated with the amplitude–frequency equation is obtained based on the averaging method. Then, the amplitude–frequency response equations are used for stability analysis, and the stability condition is founded. To validate the correctness and precision, the approximate solutions determined by the analytical method are compared with the solutions based on the numerical integration method. It is found that the approximate solutions and the numerical solutions are in excellent agreement. Finally, the effects of system parameters, such as fractional-order coefficient, order, clearance, and piecewise stiffness, on the complex dynamical behaviors of the piecewise linear single-degree-of-freedom oscillator are studied. The results show that the system parameters not only influence resonance amplitude and resonance frequency but also affect the size of the unstable region.
Keywords
Introduction
Piecewise linear elastic systems are common in engineering practice due to the clearance and backlash existing in such systems. Piecewise linearity produces strong nonlinearity and discontinuity, which may affect the performance and reliability of actual systems. Many scholars have extensively studied this issue. Xu 1 investigated the general form of periodic solutions in a system with piecewise linear viscous damping by the incremental harmonic balance method. Wang 2 studied the dynamic response and stability of a single-degree-of-freedom (SDOF) system with asymmetrical piecewise linear/nonlinear stiffness using the finite element method in the time domain. Natsiavas 3 analyzed the dynamics of piecewise linear oscillators with van der Pol-type damping. Shaw and Holmes 4 analyzed the harmonic, subharmonic, and chaotic motions existing in a piecewise linear oscillator. Li et al. 5 investigated the homoclinic bifurcations and chaotic dynamics of a piecewise linear system with periodic excitation and viscous damping. Gao and Chen 6 studied the resonance and stability for a SDOF system with a piecewise linear/nonlinear stiffness term. Narimani et al. 7 analyzed a piecewise linear system and provided a complete analytical solution that agreed with numerical simulation and experimental measurements. Jiang and Wiercigroch 8 investigated a soft impact oscillator, and several bifurcation scenarios near grazing bifurcation have been studied. Li and Ding 9 considered a vibro-impact system subjected to harmonic excitation with two asymmetric clearances with semi-analytical method. Many authors have10,11 analyzed the isolation effect of nonlinear isolator with linear elastic support boundary condition.
In such non-smooth dynamical systems, the systems themselves have various nonlinearities that affect the dynamic behavior. Fractional derivatives can accurately describe the essential properties of viscoelastic materials. Shen et al.12–15 studied the vibration of several oscillators with fractional-order derivative, and found that the fractional-order derivatives had equivalent damping and equivalent stiffness effects on the system response. Wen et al.16,17 investigated the dynamical analysis of different Mathieu equation with a fractional-order derivative. The research on piecewise linear oscillators with fractional derivatives is little. Due to the complexity of fractional-order calculus, most authors adopted numerical methods in this field. Yang et al. 18 explored stochastic bifurcations of a vibro-impact oscillator with fractional derivative elements driven by Gaussian white noise excitation. Danca 19 simulated and analyzed three piecewise continuous chaotic systems of fractional order. Marius et al. 20 investigated a new piecewise linear fractional-order Chen system by a numerical method. Lu 21 numerically investigated the chaotic behaviors of the fractional-order Chua’s circuit with piecewise linear/nonlinearity. Wu et al. 22 investigated the chaotic structure of a new fractional piecewise linear system by numerical method. Such techniques can provide solutions only for specific parameters. When the range of the parameters is large, the workload is especially large.
In this work, an elastic impacting problem of viscoelastic materials with clearance is studied by means of an analytical method. The elastic impacting vibration system of this viscoelastic material is simplified as a symmetric piecewise linear system. The effects of the clearance, piecewise linear parameters, and fractional-order parameters on the vibration performance of the system are discussed. Moreover, the correctness of the research method is verified by a comparison of the analysis and numerical results.
Equation of motion
A piecewise linear SDOF oscillator with fractional-order derivative shown in Figure 1 is considered.
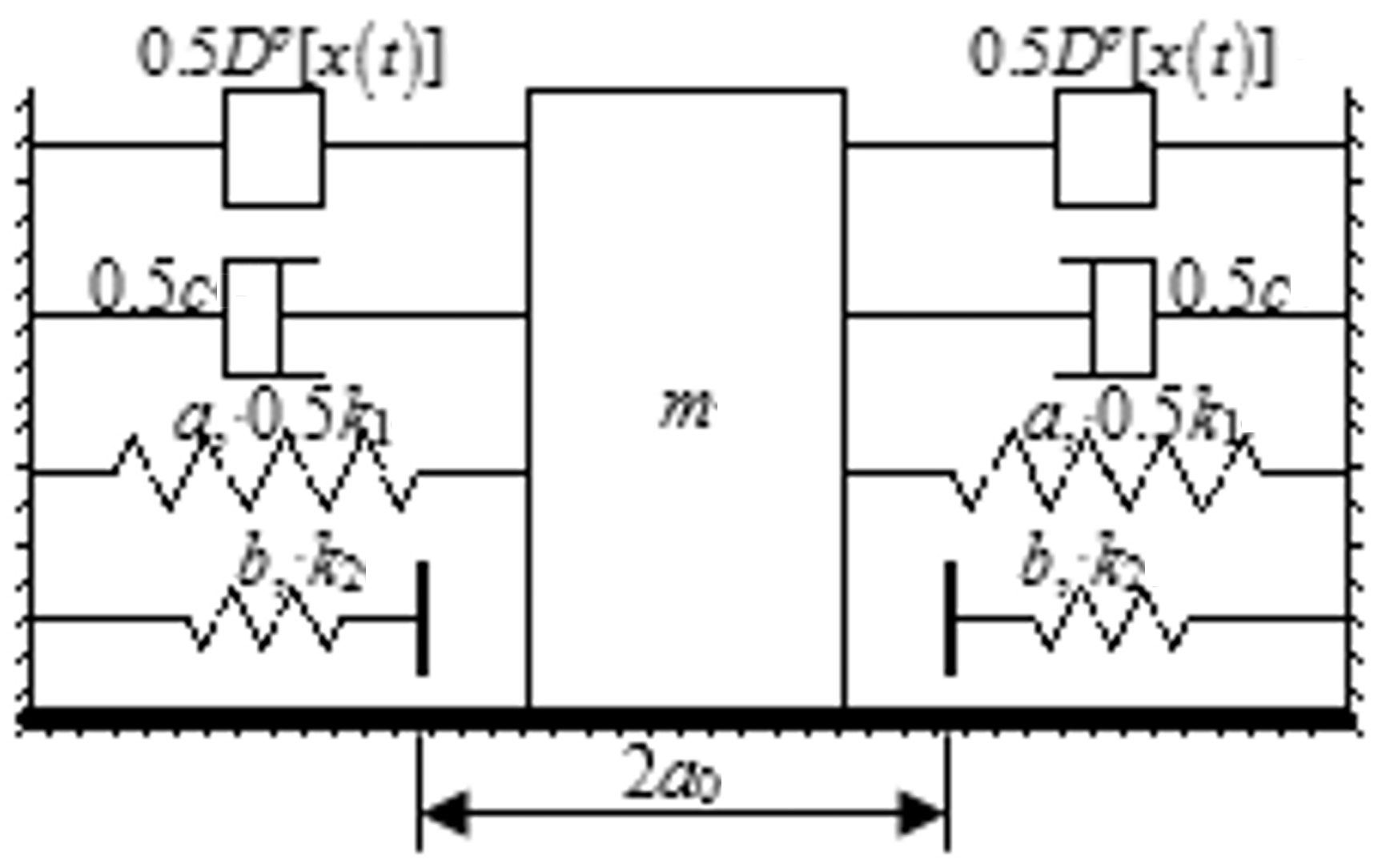
Piecewise linear SDOF oscillator with fractional-order derivative.
In this model, m,

Using the following transformation of formula

Equation (1) can be rewritten as


Approximate analytical solution
This section presents a detailed analytical procedure to find the approximate solution of the system. Different approaches had been used to find the steady-state responses of non-smooth systems with piecewise stiffness. Gao and Chen 6 applied a modified perturbation method to find the approximate solution of an SDOF system with a piecewise stiffness term. The averaging method, which is also commonly used in this kind of system,23--25 is utilized to obtain the approximate solutions in the current work.
Based on the averaging method, one could obtain the standard equations. To study the primary resonance, that is, ω0 = ω, a detuning parameter is introduced to illustrate the approximate degree between ω0 and ω
Equation (2) becomes

The solution to equation (4) is considered as

Substituting equation (5) into equation (3), one could obtain

To study the approximate analytical solution, equation (4) can be transformed into





The averaged equation for the amplitude and phase of the approximate solutions can be obtained as


The amplitude a and generalized phase θ are slow-varying functions. One can integrate them in the interval [0 T] according to the averaging method


The time terminal T is selected as T = 2π when fi (a, θ) (i = 1,2) is periodic function, and T = ∞ if f3 (a, θ) is aperiodic.
One could get the simplified forms of the first part of equation (9)


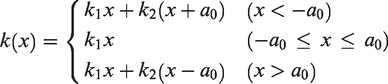
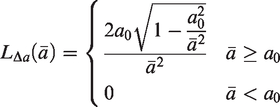
The second part of equation (9) is the piecewise linear integral. Obviously, there exist two kinds of solutions for the piecewise linear system, that is to say, a small-amplitude linear vibration (which means that the displacement does not exceed the critical displacement point a0) and a large-amplitude nonlinear vibration which can be beyond the critical point a0. Accordingly one can get


The third part of equation (9) is the fractional-order derivative. Different definitions are used for fractional-order derivatives, such as the Grünwald–Letnikov, Riemann–Liouville, and Caputo definitions.26,27 They are all equivalent under certain conditions. Here Caputo’s definition is adopted with the form as



In order to calculate the integrals, we introduce some important results about the definite integrals, which had been deduced in literature15,16




Substituting equations (10), (11), and (15) into equation (9), the following results are obtained



Substituting the original parameter into equation (16) yields





Steady-state solutions and their stability conditions
Steady-state solutions
For nonlinear systems, the steady-state response


After the elimination of

Letting

Obviously, equation (22) is an implicit about amplitude a, and it is difficult to directly solve it. In this paper, Matlab’s fsolve command is used to solve the problem, and it is obtained in a segmented way, that is, w is taken as a variable to select different segmented intervals, in which the curves in each segment are guaranteed to be monotonous, and different initial values need to be selected for different interval segments, so that the whole amplitude–frequency curve can be obtained by connecting each segment of curves.
Stability conditions
To analyze the stability of the stationary solution, we substitute


Based on equations (20) and (23), one could obtain the characteristic determinant of the system

We can analyze its stability condition for two cases:

where
Furthermore, the stability condition for the steady-state solution of

Figure 2 shows the amplitude–frequency curve and its stability conditions for the steady-state solution. The stability condition curve is denoted by a solid blue line, which is the boundary between the unstable and stable regions. The region above the curve, that is,
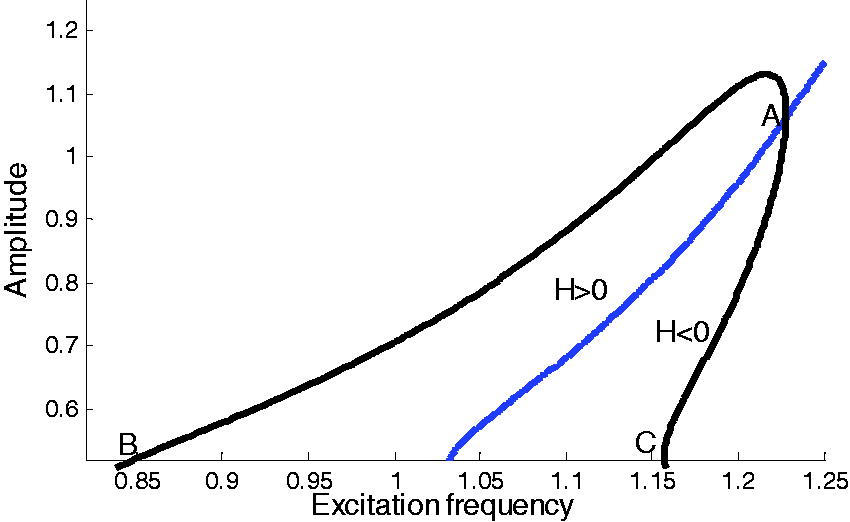
Amplitude–frequency curve and its stability conditions for the steady-state solution (
2.

The characteristic roots can be obtained as

According to the above analysis, we know that the real parts of the eigenvalues are less than zero, so that the solution for
Numerical simulations
Comparisons between analytical and numerical results
To validate the approximate approaches, the periodic solutions obtained by the averaging method are compared with the solutions from the numerical integration method. The numerical method uses the series expanding technique described in literature26,27 and equation (29) is the approximate formula of the method


As an example, the basic parameters of the system are given by m = 10, c = 1, F = 3, k1 = 10, k2 = 12, a0 = 0.7, K1 = 0.1, and p = 0.5. The solid line in Figure 3 shows the amplitude of the stable periodic solution. The circles in Figure 3 represent the result of the numerical simulation, and the time step is taken at h = 0.004. The approximate and numerical solutions are in excellent agreement in the cases of primary resonance, and jumping phenomenon occurs at points A and B (a0 = 0.7).
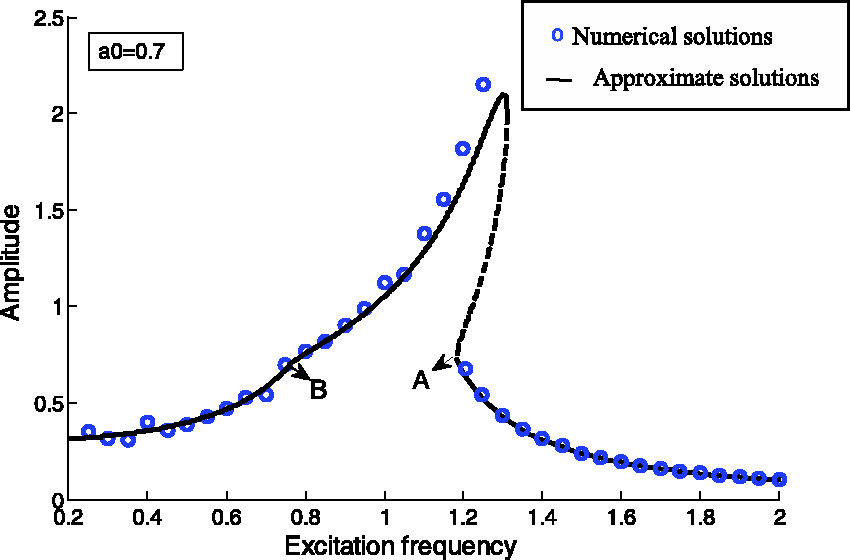
Comparison of the amplitude–frequency curve by analytical and numerical methods (m = 10, c = 1, F = 3, k1 = 10, k2 = 12, a0 = 0.7, K1 = 0.1, and p = 0.5).
Effects of piecewise linear parameters on system dynamics
The following section presents the study about the effects of the two parameters of the piecewise linear term on the system dynamics.
Clearance a0
With other system parameters remaining unchanged, three clearance parameters, a0 = 0.5, a0 = 0.7, and a0 = 0.9, are selected to investigate the different dynamic response modes, and the amplitude–frequency curves are obtained in Figure 4. The jump points of the amplitude–frequency curves appear where a0 is 0.5, 0.7, and 0.9. The curves below the jump points are coincidental because the other parameters remain unchanged.
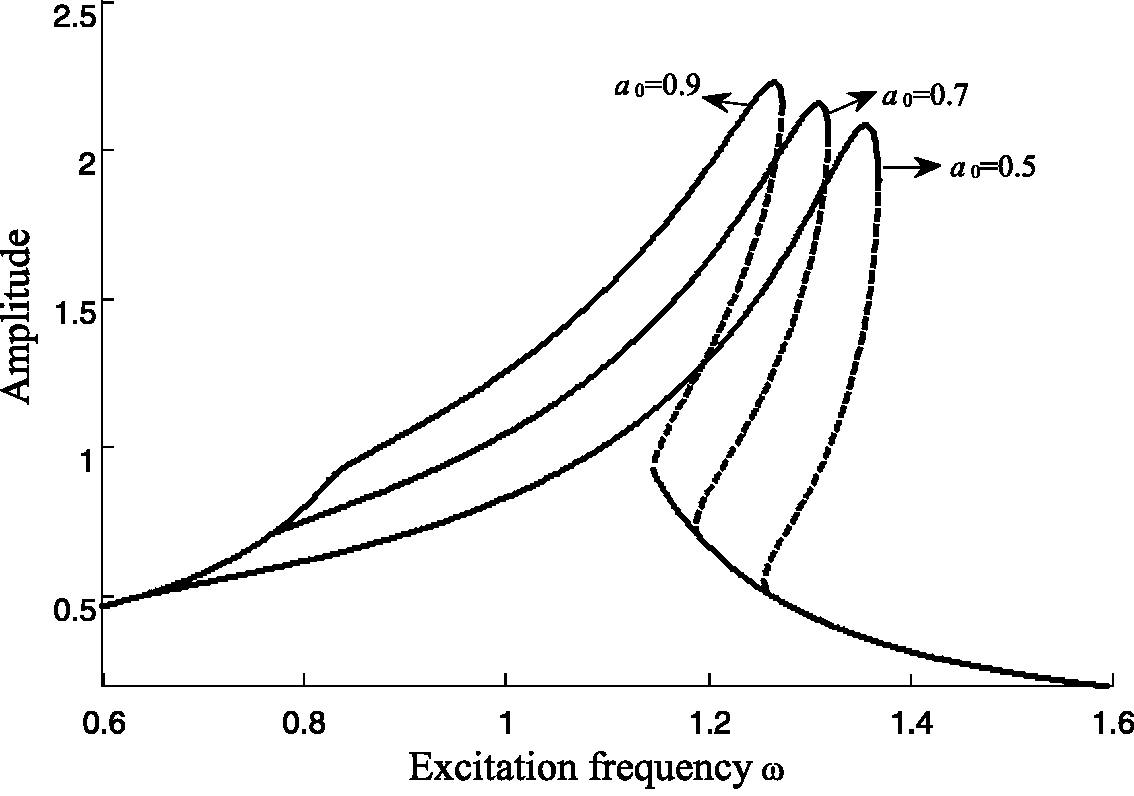
Effects of clearance a0 on the amplitude–frequency curves.
It can be seen from equation (18b) that with the increase of a0, the equivalent linear stiffness coefficient will decrease. The increase of the clearance a0 can contribute to smaller resonant frequency of response. But, as shown in equation (18a), the larger the clearance a0, the equivalent linear damping coefficient of the system will not change. Accordingly, as shown in Figure 4, with the increase of a0, the resonant amplitude increases slightly. At the same time, the larger the clearance a0 leads to the larger of the unstable region of the system.
Piecewise stiffness k2
Similarly, the influence of the stiffness k2 of spring b on the dynamic behavior is analyzed as the other system parameters remain unchanged. Three stiffness parameters, that is, k2 = 10, k2 = 15, and k2 = 20, are selected to investigate the different dynamic response modes based on the amplitude–frequency in equation (22), and the different amplitude–frequency curves of steady-state solution are shown in Figure 5. When k2 increases gradually, the jumping point of the system amplitude–frequency curves keeps invariable because clearance a0 is the same. However, the nonlinearity of the system ω will increase gradually in this procedure. Furthermore, with the k2 increases gradually, the resonance curves continuously shift to the direction of frequency value increase, and the resonance amplitude decreases. Moreover, the unstable region increases slightly as k2 increases. Therefore, the piecewise stiffness k2 affects not only the resonant amplitude and frequency of the system but also the size of the unstable region.
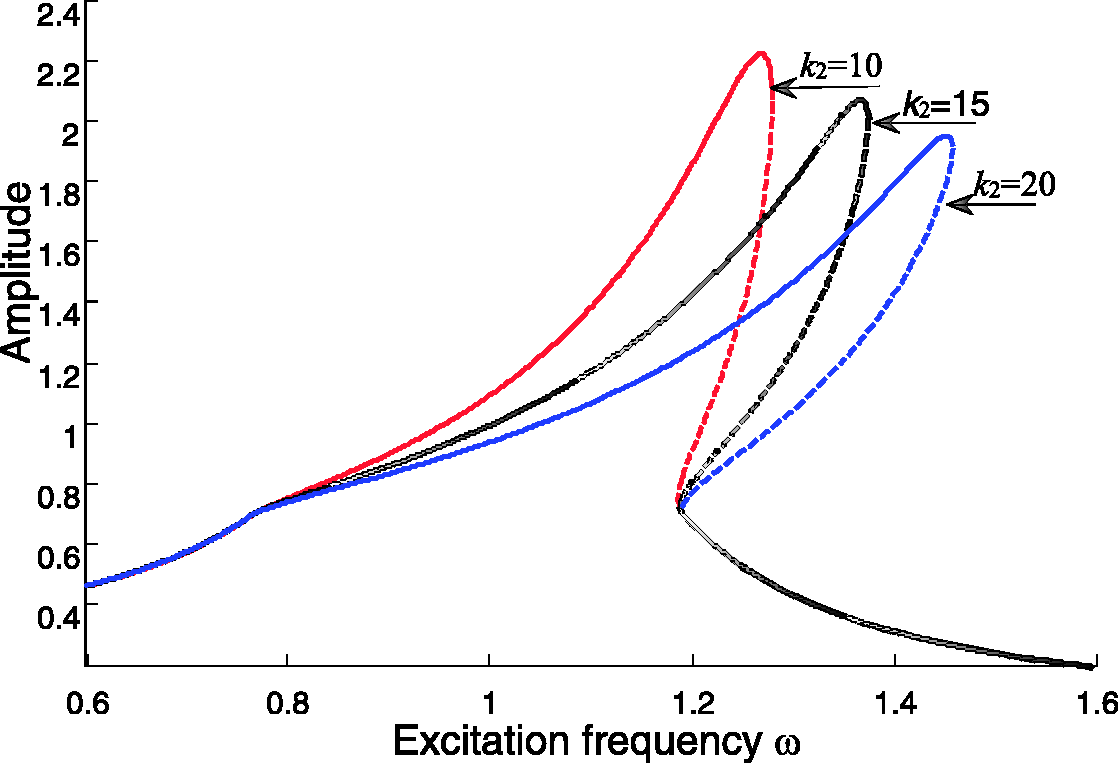
Effects of the stiffness k2 on the amplitude–frequency curves.
Effects of fractional-order term on system dynamics
Next, the effects of fractional-order coefficient K1 and order p on system dynamics are studied.
Fractional-order coefficient K1
The amplitude–frequency curves with different fractional-order coefficients K1 as 0.3, 0.6, and 0.9 are shown in Figure 6. When fractional-order coefficient K1 increases gradually, the equivalent linear damping and equivalent linear stiffness of the system will increase simultaneously based on equations (18a) and (18b). This effect lowers both the resonance amplitude and resonance frequency of the system and reduces the unstable region and the frequency range of the resonance region.
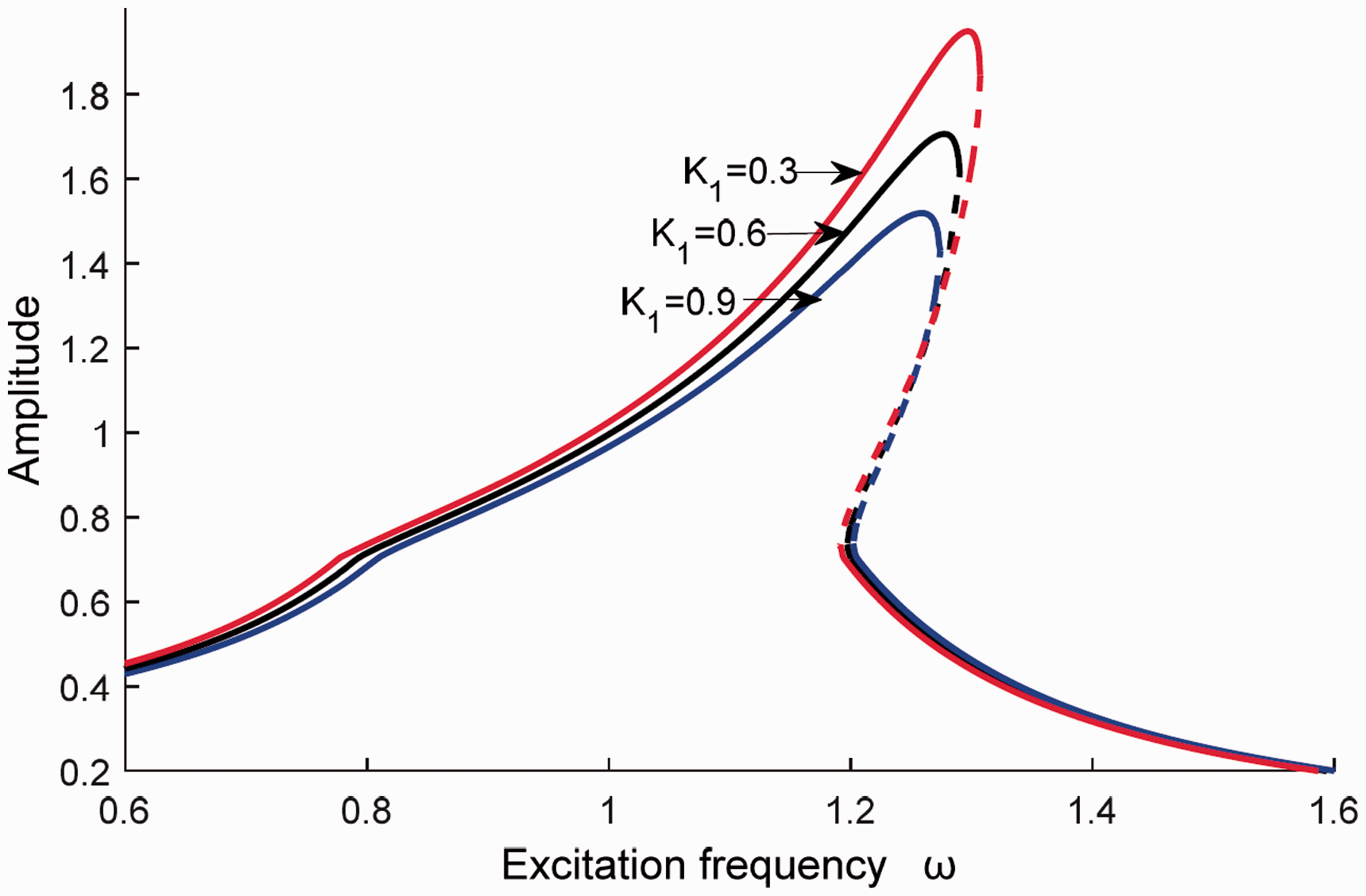
Effects of the fractional-order coefficient K1 on the amplitude–frequency curves.
Fractional order p. Four fractional order parameters, that is, p = 0, p = 0.1, p = 0.3, p = 0.6, and p = 0.9 and p = 1 are selected to study the different dynamic response modes, and the results are shown in Figures 7 and 8. As shown in equation (18a), the larger the fractional order p, the larger the equivalent linear damping of the system. As shown in Figure 6, the resonance amplitude of the system will become smaller with the increase of fractional order. Furthermore, the larger the fractional order p, the smaller the equivalent linear stiffness of the system, which will result in a smaller resonant frequency. Given that the parameters of the piecewise linear term do not change, the amplitude–frequency curves of the system do not shift. Meanwhile, with the increase of p, the frequency range of the resonance region becomes noticeably smaller, and the size of the unstable region also becomes smaller. Therefore, the fractional-order order p affects not only the resonance amplitude and the resonant frequency of the system but also the frequency range of the resonance region and the size of the unstable region.
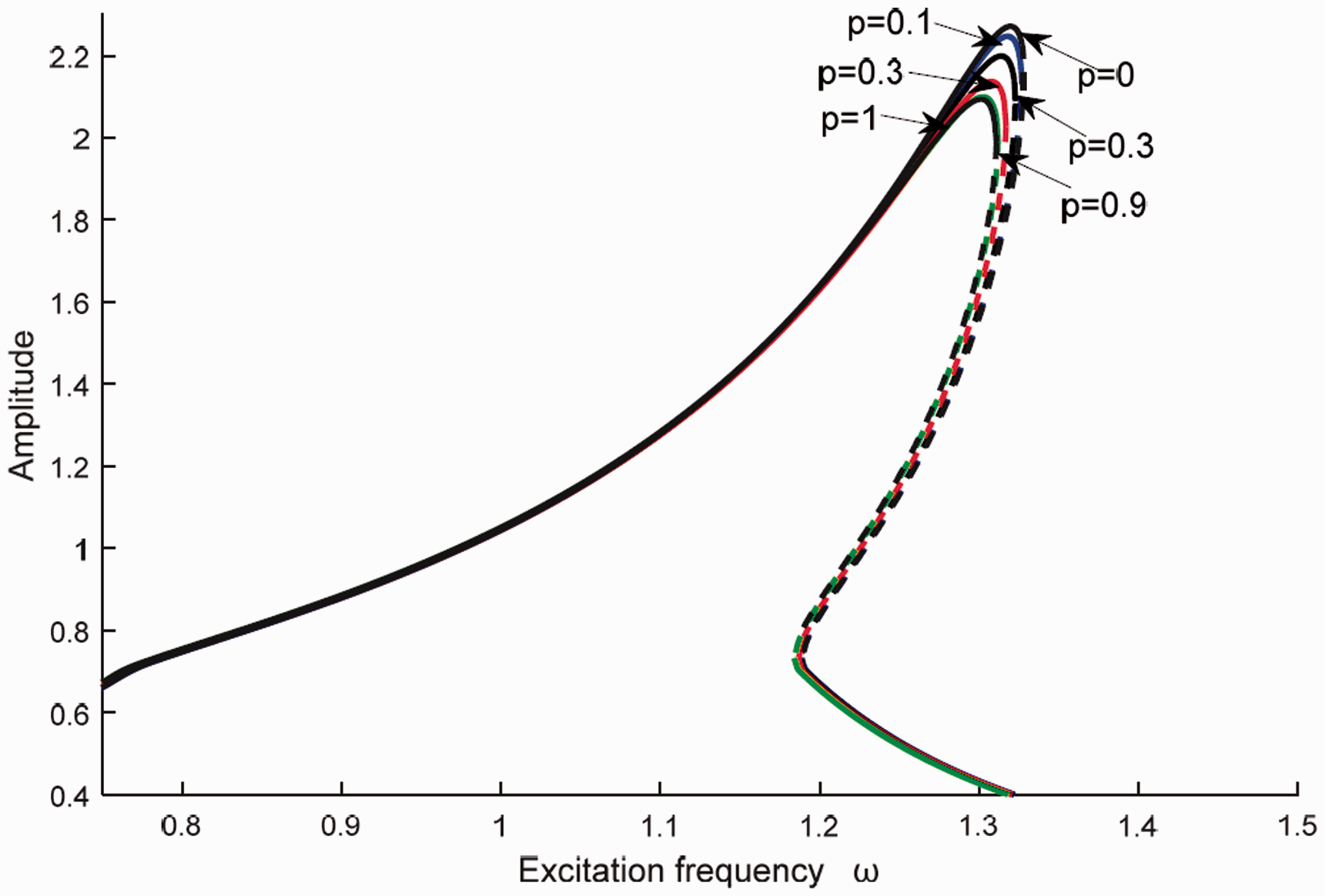
Effects of the fractional-order order p on the amplitude–frequency curves.
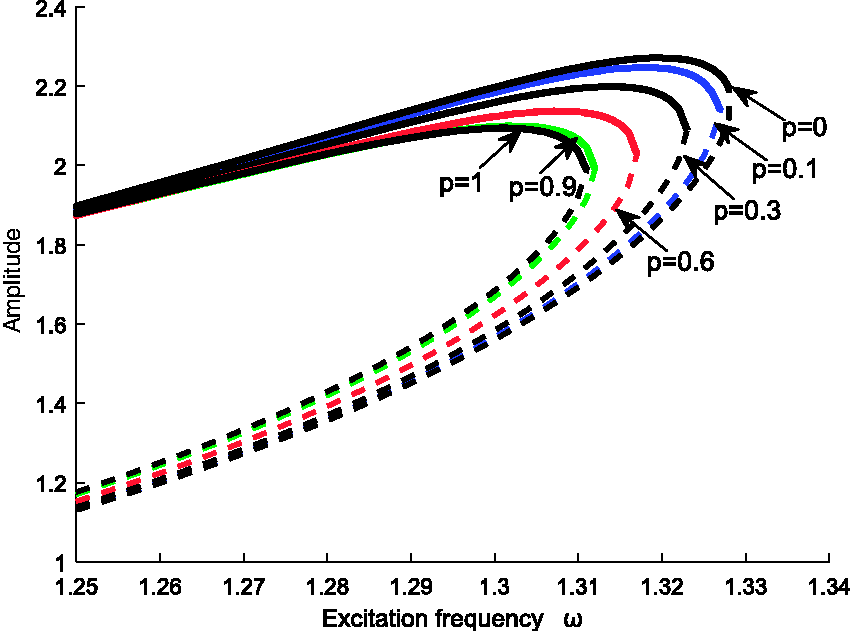
Effects of the fractional-order order p on the amplitude–frequency curves.
Conclusions
In this study, a piecewise linear SDOF oscillator with fractional-order derivative is analyzed by the averaging method, and the approximately analytical solution associated with the amplitude–frequency curves are obtained. Then, the amplitude–frequency equations are used for stability analysis, and the stability condition is established. The numerical results are also obtained by simulations, and the coincidence is good. Finally, the effects of the system parameters on the dynamic behaviors are studied. Clearance a0, piecewise stiffness k2, fractional-order coefficient K1, and fractional-order order p affect not only the unstable region but also the resonant amplitude and resonant frequency of the system. In addition, the fractional-order coefficient K1 and the fractional-order order p influence the frequency range of the resonance region of the system. Therefore, the fractional-order term and the piecewise linear term both play an important role in the dynamic behavior of the system. These results could present useful reference to analyze the dynamic behavior for similar piecewise linear with fractional-order derivative systems.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors are grateful to the support by National Natural Science Foundation of China (No. 11772206, No. 11802183, No. 11572207, and No. 11872256).