
Abstract
This paper proposes an improved neuroendocrine–proportional–integral–derivative controller for nonlinear multi-input–multi-output crane systems using a sigmoid-based secretion rate of the hormone regulation. The main advantage of the sigmoid-based secretion rate neuroendocrine–proportional–integral–derivative is that the hormone secretion rate of neuroendocrine–proportional–integral–derivative can be varied according to the change of error. As a result, it can provide high accuracy control performance, especially in nonlinear multi-input–multi-output crane systems. In particular, the hormone secretion rate is designed to adapt with the changes of error using a sigmoid function, thus contributing to enhanced control accuracy. The parameters of the sigmoid-based secretion rate neuroendocrine–proportional–integral–derivative controller are tuned using the safe experimentation dynamics algorithm. The performance of the proposed sigmoid-based secretion rate neuroendocrine–proportional–integral–derivative controller-based safe experimentation dynamics algorithm is evaluated by tracking the error and the control input. In addition, the performances of proportional–integral–derivative and neuroendocrine–proportional–integral–derivative controllers are compared with the proposed sigmoid-based secretion rate neuroendocrine–proportional–integral–derivative performance. From the simulation work, it is discovered that the sigmoid-based secretion rate neuroendocrine–proportional–integral–derivative design provides better control performances in terms of the objective function, the total norm of error and the total norm of input compared to proportional–integral–derivative and neuroendocrine–proportional–integral–derivative controllers. In particular, it is shown the proposed sigmoid-based secretion rate neuroendocrine–proportional–integral–derivative controller contributes 5.12% of control accuracy improvement by changing the fixed hormone secretion rate into a variable hormone secretion rate based on the change of error.
Introduction
Nowadays, nonlinear multi-input–multi-output (MIMO) crane systems are widely used in the container logistics industry for loading and unloading containers from and to container ships in the harbour. During the loading and unloading process, the crane requires a highly accurate controller to control the payload oscillations and payload bouncing to avoid any cause of damage or accidents. Various controller methods have been proposed to achieve accurate movement. These include sliding mode control, 1 linear quadratic regulator (LQR) control, 2 feedback control, 3 H-infinity control, 4 proportional–integral–derivative (PID) with input shaping, 5 and fuzzy-sliding mode control. 6 Generally, most of the controller designs are model based, where the control is derived from mathematical model of the system, and this is very challenging and complicated in case of nonlinear dynamic systems. 7 Thus, model-based control methods potentially suffer from problems of un-modelled dynamics, which lead to model inaccuracy and hence poor control performance.
A data-driven control scheme is a suitable alternative option since it does not depend on the model of the system in designing the controller.8,9 A data-driven control scheme is designed using the input and output data only and treats the system as a black box. Meanwhile, the data-driven control based on PID control is commonly chosen due to its simple structure, ease of implementation and fewer number of parameters to tune, and that it allows to be used for a wide range of operating conditions.10,11 However, the PID controller has some limitations in controlling a complex nonlinear system, especially at nonlinear MIMO crane system. This is due to the fact that the PID structure is linear in nature and it is unable to adapt with the complex nonlinear system. 12 Thus, large numbers of published studies have proposed advanced PID controllers, such as fractional PID, 13 neural network PID, 14 fuzzy PID, 15 sigmoid PID16,17 and fractional order sliding mode PID. 18
On the other hand, the controllers that were inspired by nature in biological phenomena have also been proposed to improve the conventional PID. This include brain emotional learning (BEL), 19 neuro-dynamics control, 20 immune system control 21 and neuroendocrine control.22,23 From the aforementioned, the neuroendocrine–PID (NEPID) control has shown great potential in providing high control accuracy and performance in controlling nonlinear MIMO systems. 24 Based on our preliminary study, 25 the NEPID also shows a promising results for nonlinear MIMO gantry crane system. Generally, the NEPID control is a combination of neuroendocrine with the PID control that is likely to result in more efficient and better control performance as compared to the standard PID control. The neuroendocrine is derived from general secretion rules of the hormone in the human body that has the form of a hill function.22,26 This hormone regulation mechanism can be generalized and modified mathematically, which can then be applied to control systems by embedding an additional bio-inspired section to the existing PID controller. However, in the existing version of the NEPID, the parameter of hormone secretion rate is constant during the whole simulation or experiment time. Hence, it is worth to improve the existing NEPID by varying the hormone secretion rate parameter according to the change in control variable error. In particular, it is proposed in this study to modify the fixed hormone secretion rate to variable secretion rate according to the changes of the control variable error by using a sigmoid function. Therefore, designing the variable hormone secretion rate of neuroendocrine–PID control could offer a great potential in improving the control accuracy of the standard NEPID controller in controlling nonlinear MIMO crane systems.
This paper presents a sigmoid-based secretion rate neuroendocrine–PID (SbSR–NEPID) control mechanism for controlling nonlinear MIMO crane systems. The parameters of SbSR–NEPID are tuned using safe experimentation dynamics (SED) in the data-driven control framework. The SED optimization method is a game theoretic method that randomly perturbs several elements of the design parameter to search for the optimal design parameter. 27 The essential feature of the SED method is that it is able to provide stable convergence and better control accuracy by keeping the best parameter value in the updating process. Moreover, the coefficients of the SED method are independent of the number of iterations and thus robust to disturbances or delays during the tuning process. Therefore, the SED method has good capability to find the optimal SbSR–NEPID parameters and thus produce a better control performance. The performance of the proposed control approach is validated through application to a nonlinear MIMO crane system in terms of tracking error and control input energy. Underpinning this novel technique, the contribution of this work is to verify that the SbSR–NEPID provides better control performance accuracy than the standard NEPID and the standard PID controller by modifying the fixed secretion rate into variable secretion rate based on a sigmoid function. Hence, the new version of NEPID could offer more effective neuroendocrine regulation that can track the changes of control error.
The rest of the organization of this research paper is organised presented as follows. The second section presents the given nonlinear MIMO crane system and the problem formulation of the data-driven SbSR–NEPID controller. In the third section, SbSR–NEPID control design based on SED-based method is explained. The proposed controller is then validated with a container gantry crane system in the fourth section. The analysis and the performance comparison between the proposed controller and the standard NEPID and the standard PID controllers are also presented and discussed. Finally, the conclusions drawn from the work are presented in the fifth section.
Notation: The real number sets and the positive real number sets are denoted by
Problem formulation
In this section, the nonlinear MIMO crane system is firstly described. Then, the problem setting of the proposed SbSR–NEPID controller for the MIMO crane system is presented.
Container gantry crane system
Figure 1 shows a container gantry crane system for swing motion of the payload caused by trolley movement28,29 in which X represents the direction of motion of the trolley and Z is the vertical direction. The outputs x(t), l(t), and



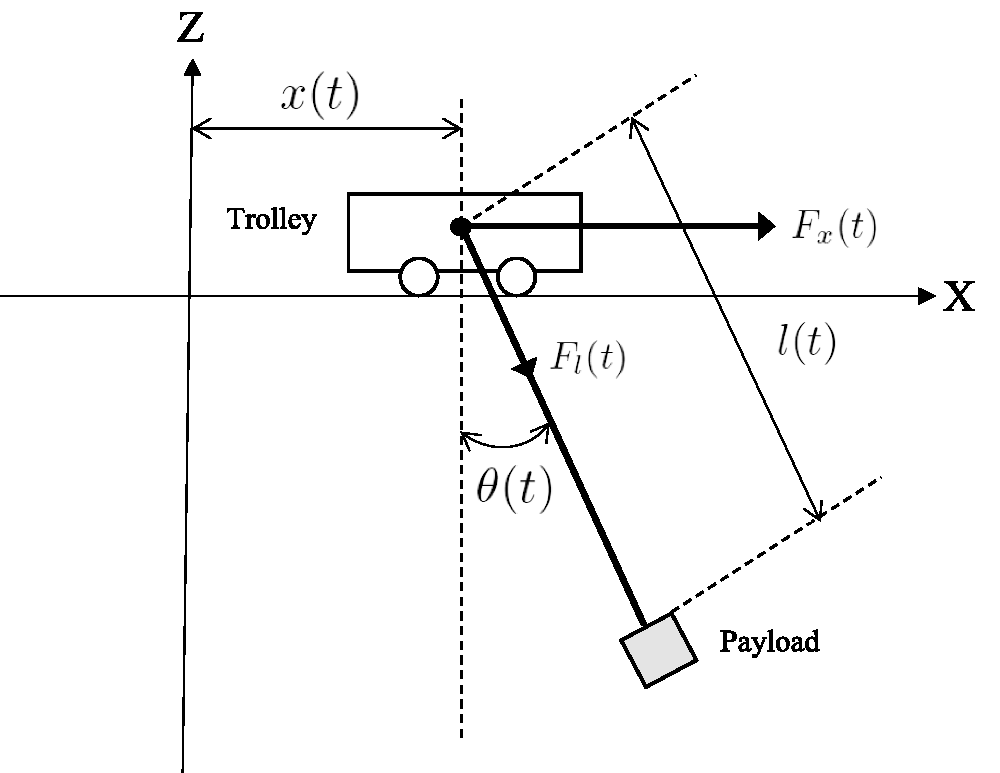
The container gantry crane system.
The function






Then, the output of container gantry crane is
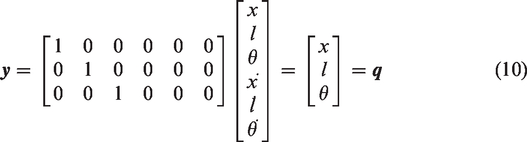
The parameters of the system considered are
Problem setting
Consider the SbSR–NEPID control for MIMO crane system as shown in Figure 2, where


is the PID controller for

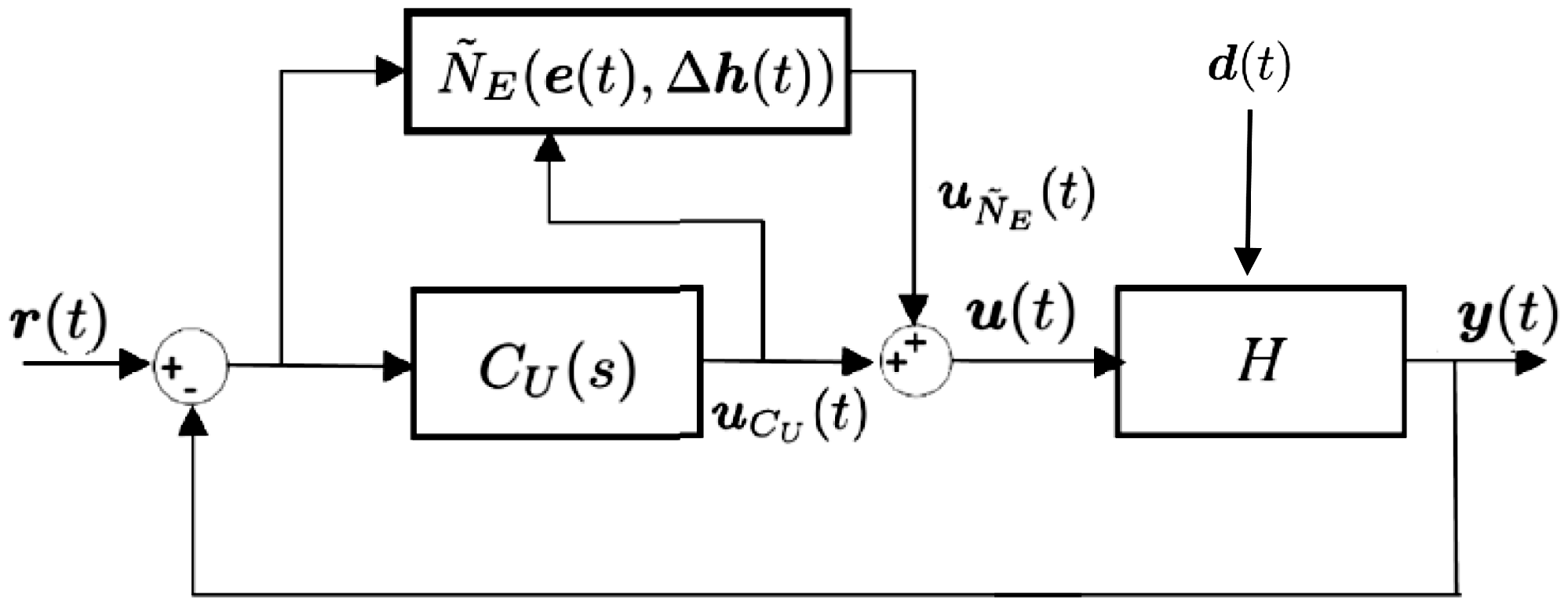
The SbSR–NEPID control system.
The



such that


Thus, the combination of the signals

Next, the system in Figure 2 is observed for its performance index based on



Design of SbSR–NEPID using SED algorithm
In this section, the detailed solution of Problem 2.1 is presented. Firstly, the SED algorithm, which is used to tune the control parameters of SbSR–NEPID is presented. Secondly, the execution of the data-driven SbSR–NEPID control design method for minimizing the control objective in equation (22) is described.
Safe experimentation dynamics
Consider

as an optimization problem that minimizes the objective function


The steps of the SED method are as follows:
Step 1: Determine the values of
Step 2: If
Step 3: Generate a random number
Step 4: Obtain the objective function
Step 5: If the pre-stated termination condition is satisfied, the optimal design parameter

is recorded. If not, set
The pre-stated termination condition is based on the maximum number of iterations
Note that, in equation (25), the symbols
Data-driven sigmoid-based secretion rate neuroendocrine–PID design
In order to accelerate the exploration of the design parameter searching, a logarithmic scale is employed for the design parameter

Step 1: Let
Step 2: Implement the SED algorithm for the objective function in equation (22).
Step 3: After
Numerical example
In this section, the performance investigation of the data-driven SbSR–NEPID controller based on the SED method for nonlinear container crane system is presented. The performance of the SbSR–NEPID is compared with the standard NEPID and the standard PID controllers. Each performance controller is evaluated based on the following criteria:
The analysis of the objective function The control performance accuracy comparison between the SbSR–NEPID and the NEPID controller. Specifically, the percentage of the control accuracy improvement

Next, the container gantry crane system in Figure 1 is considered, where the number of inputs

Here, the SbSR–NEPID controller


The dimension of the SbSR–NEPID controller parameters for equations (30) and (31) is
Design parameters.
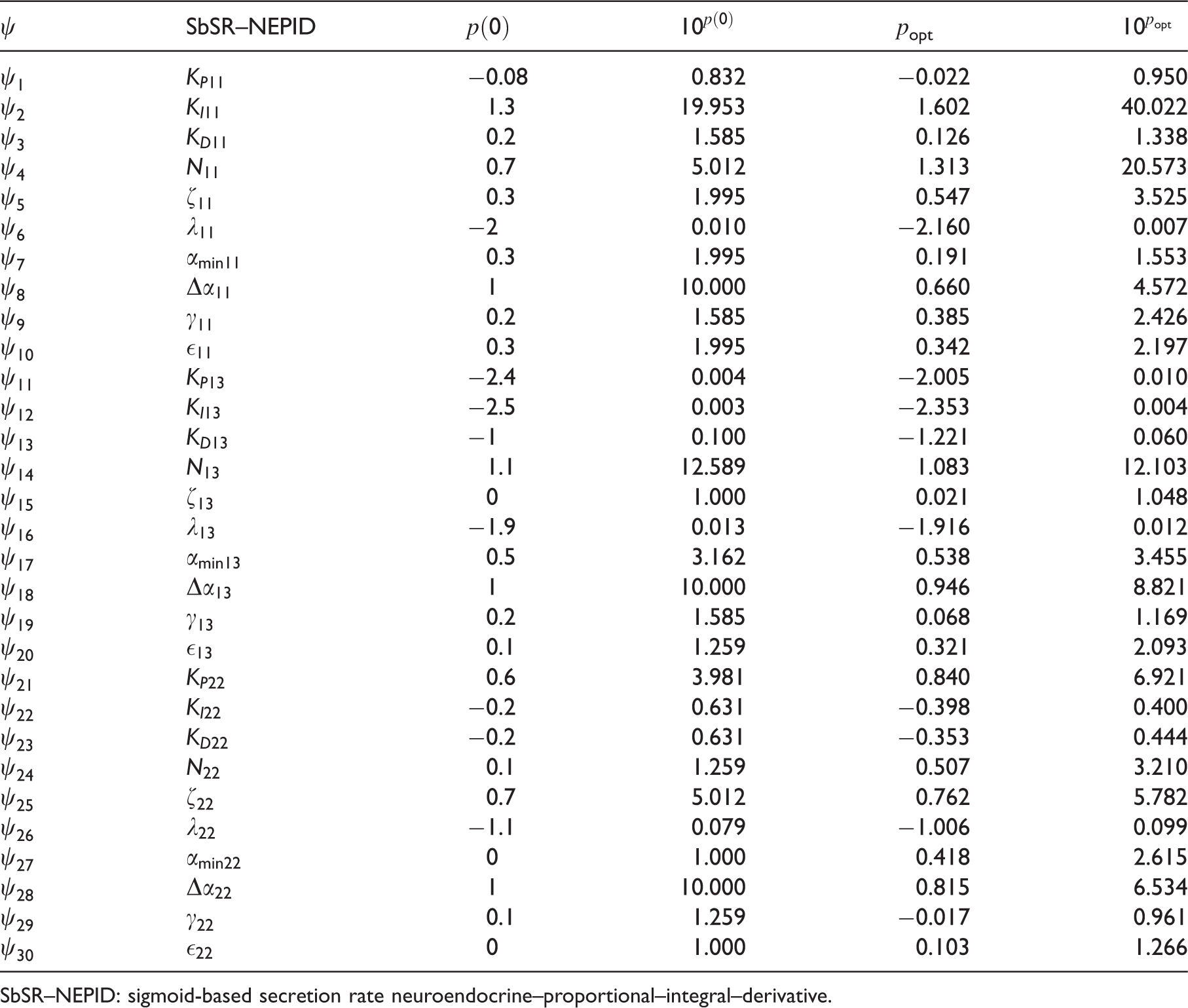
SbSR–NEPID: sigmoid-based secretion rate neuroendocrine–proportional–integral–derivative.
Figure 3 shows the objective function
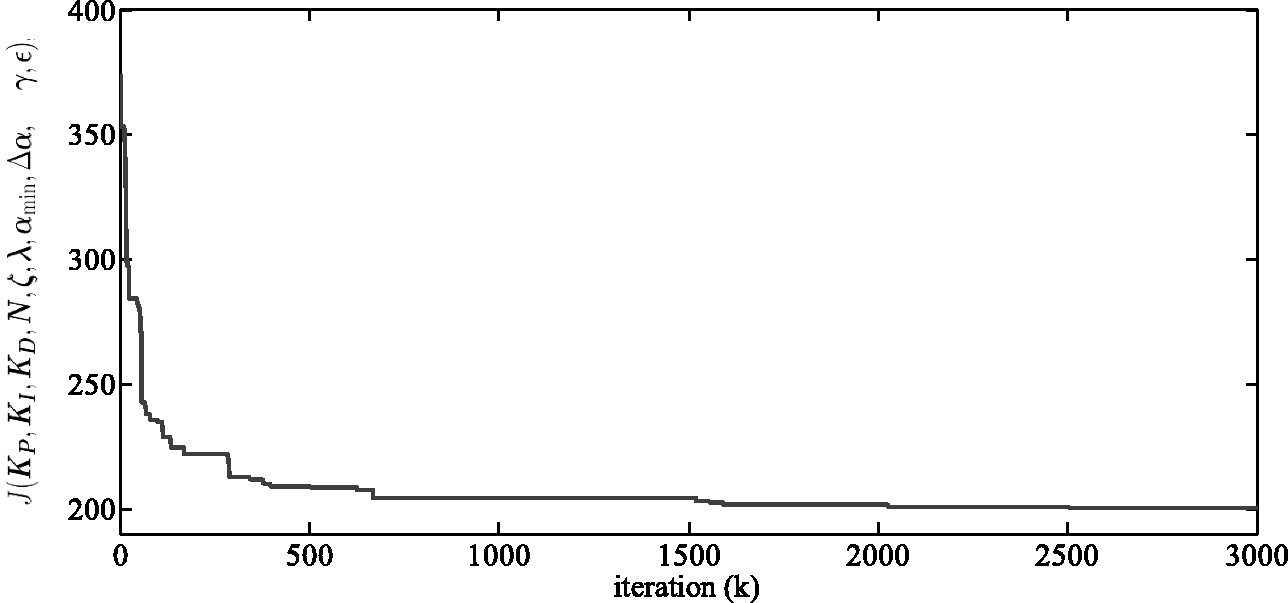
The objective function,
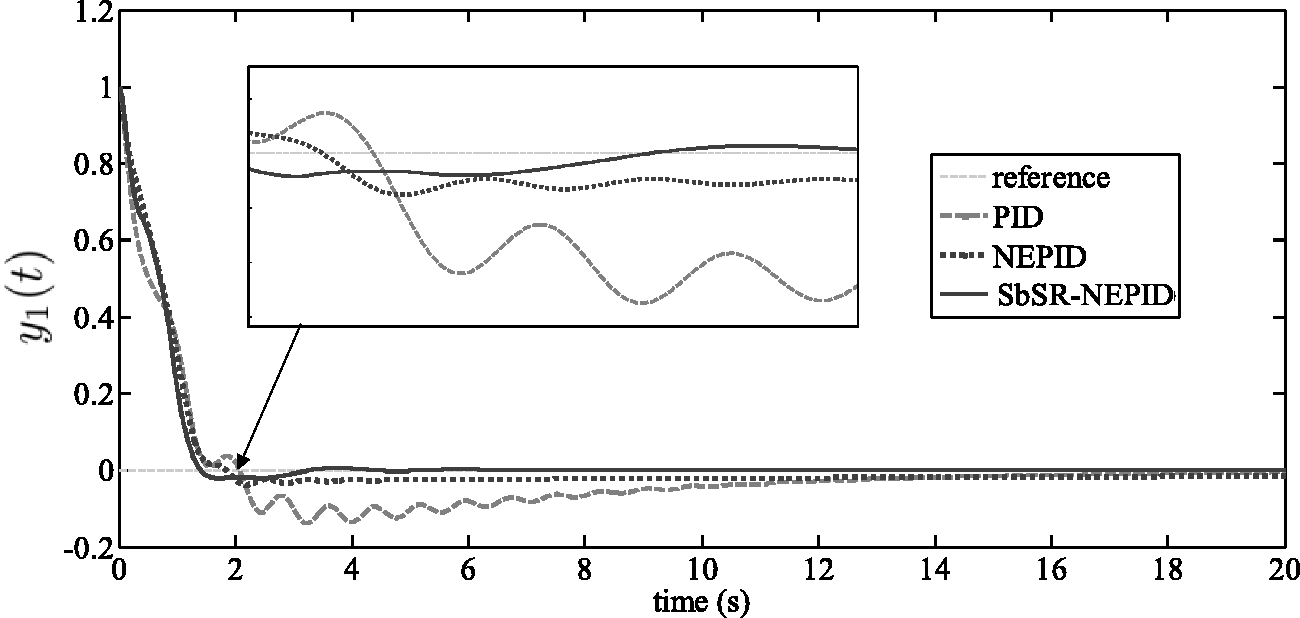
Trolley displacement

Rope length
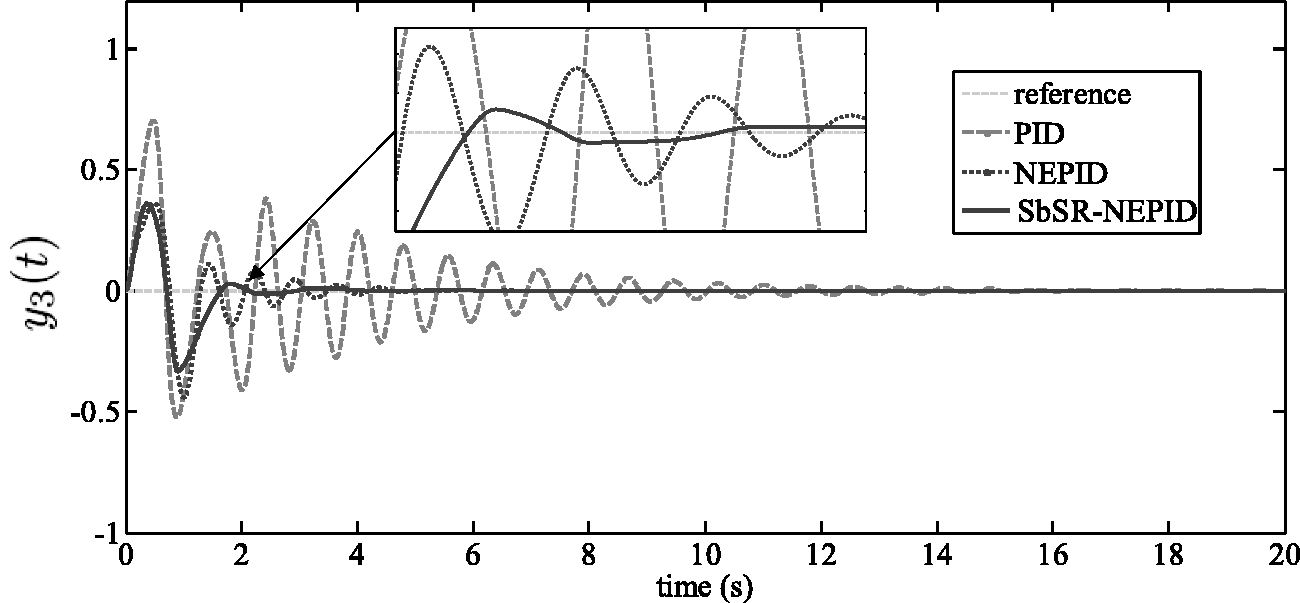
Sway angle of the payload
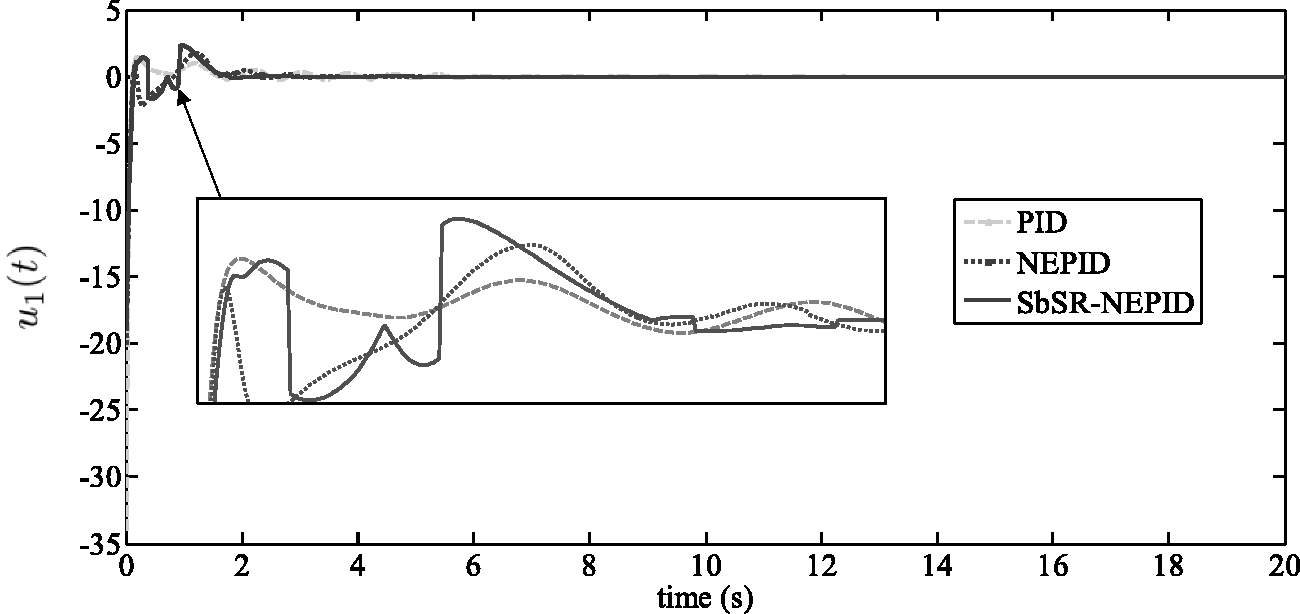
The trolley force,
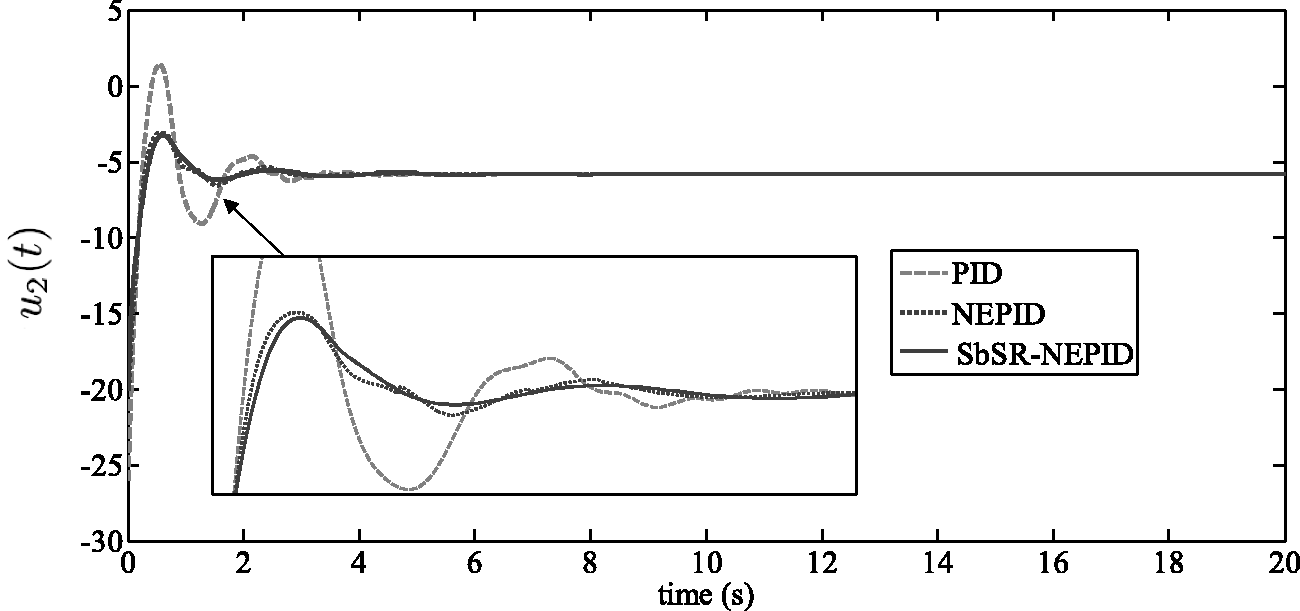
The hoist force,
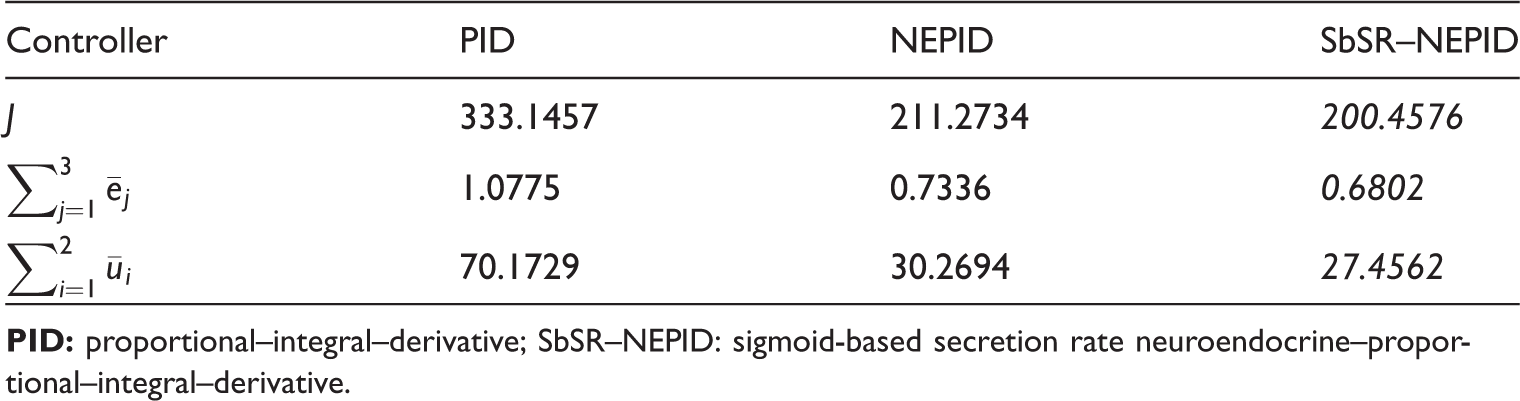
All the above findings are also supported by the numerical analysis shown in Table 2. The results show that the objective function
Numerical result of container gantry crane system.
The optimal hormone secretion rate functions
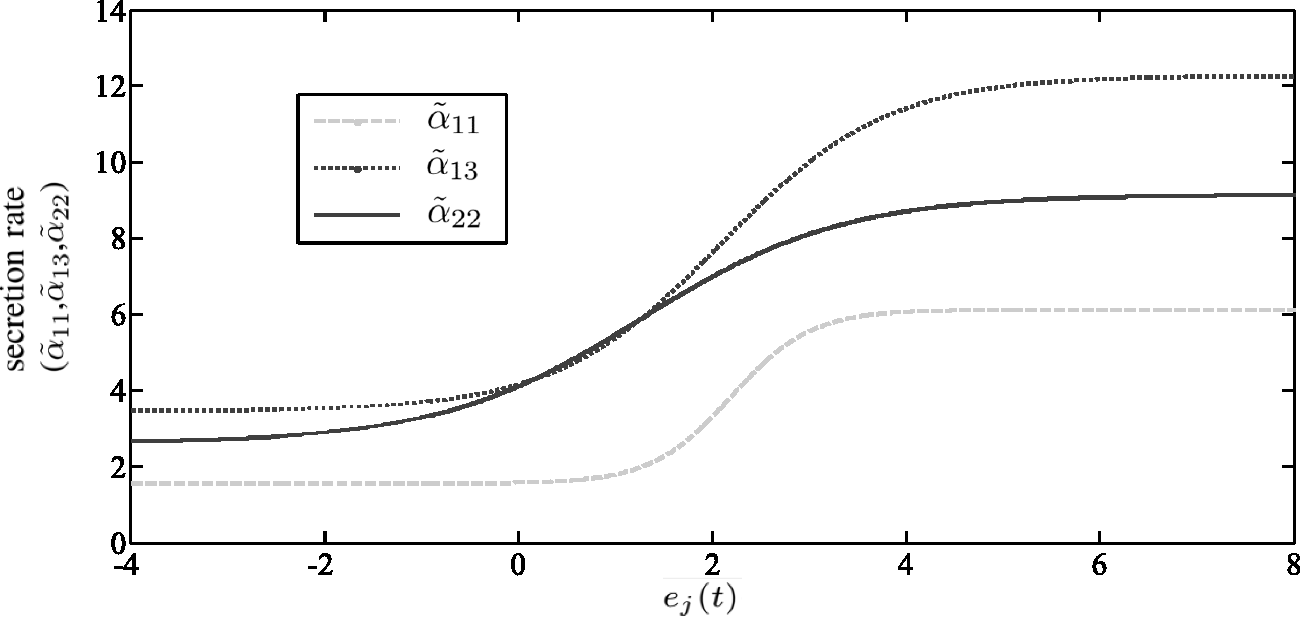
The sigmoid function of
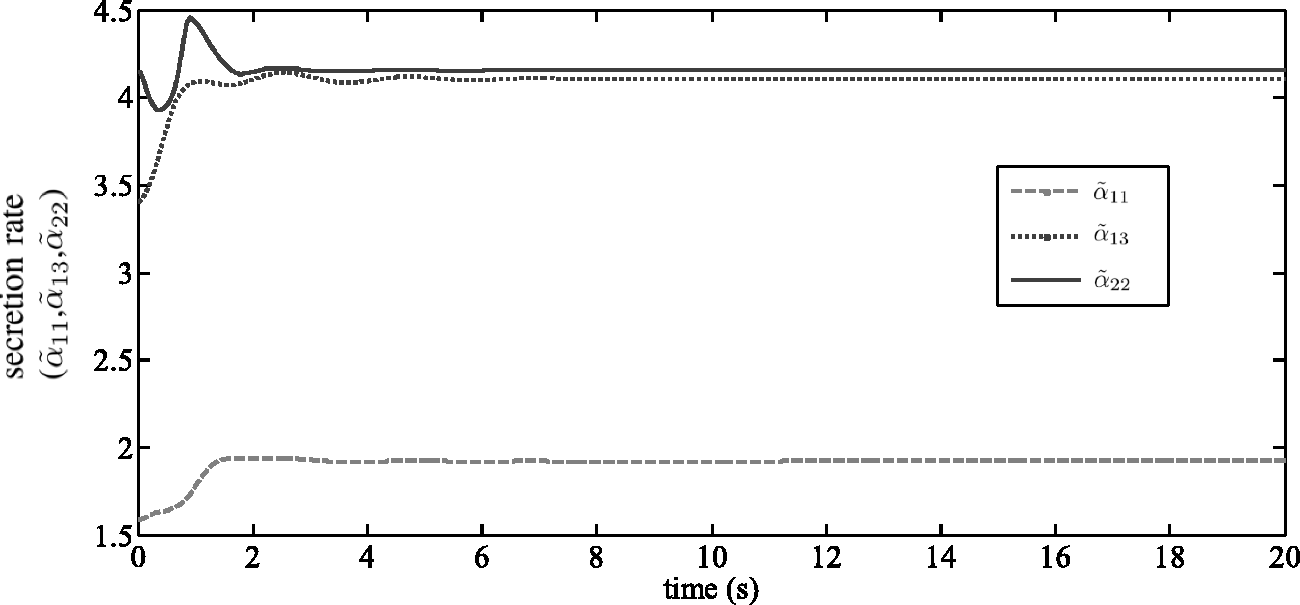
The hormone secretion rate responses of
On the other hand, we also investigate the proposed SbSR–NEPID controller structure with disturbance 
Then, Figures 11, 12 and 13 show the responses of the controller in the same line configuration as in Figures 4, 5 and 6. This simulation result demonstrates that the SbSR–NEPID is able to handle disturbance at
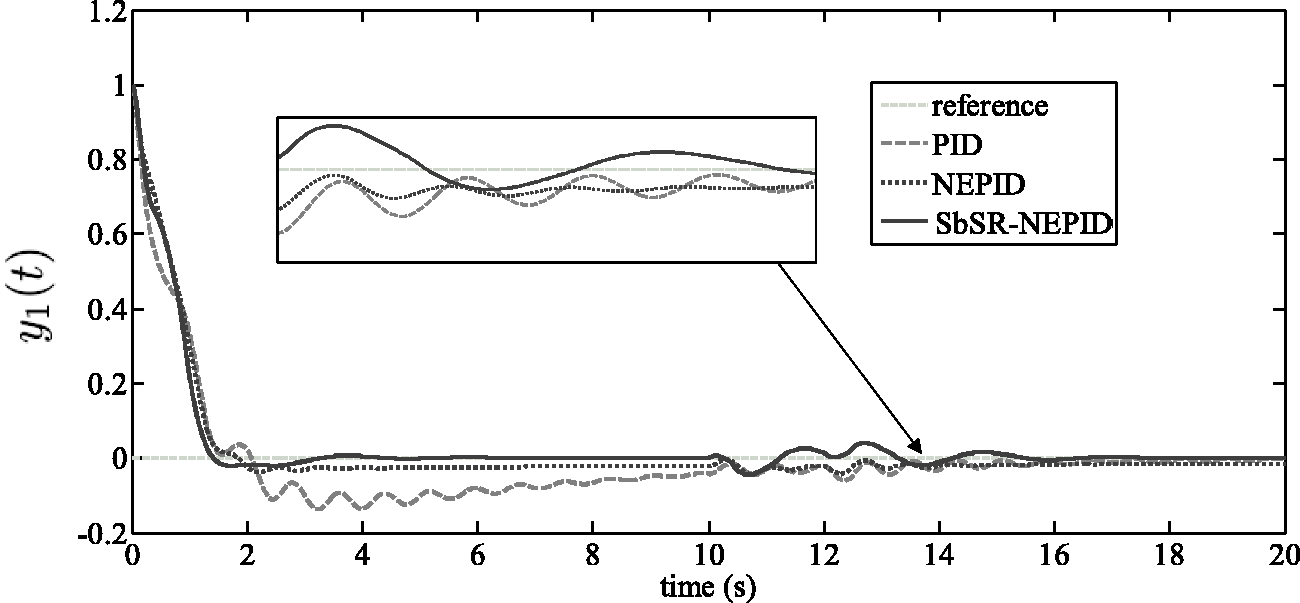
Trolley displacement
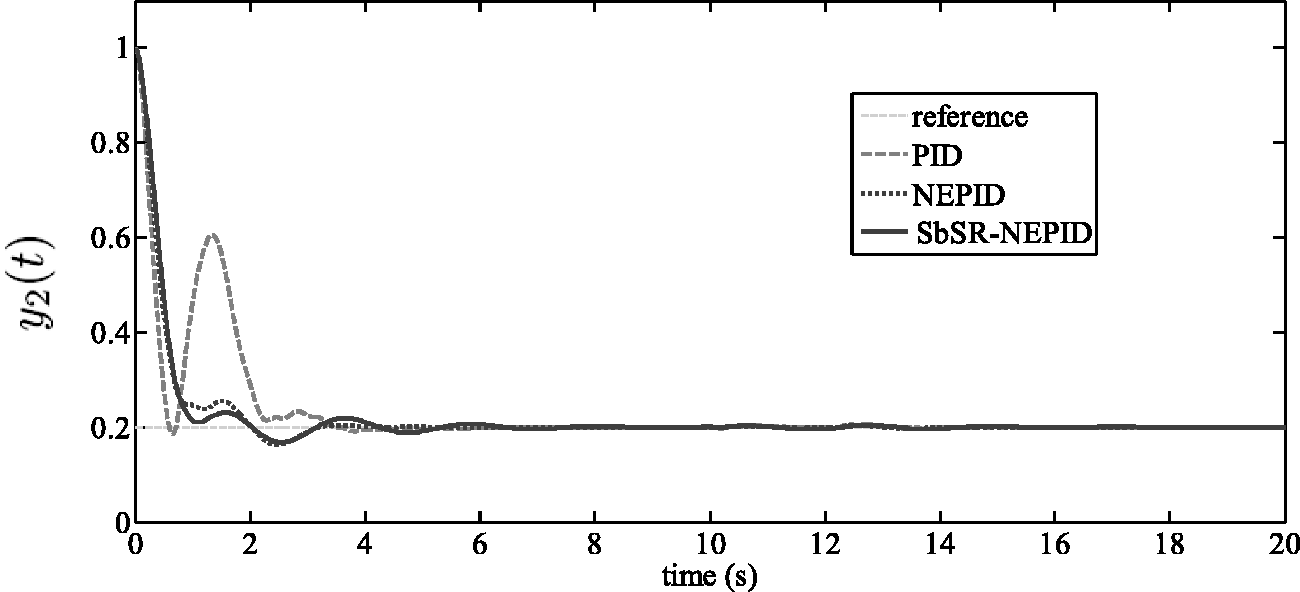
Rope length
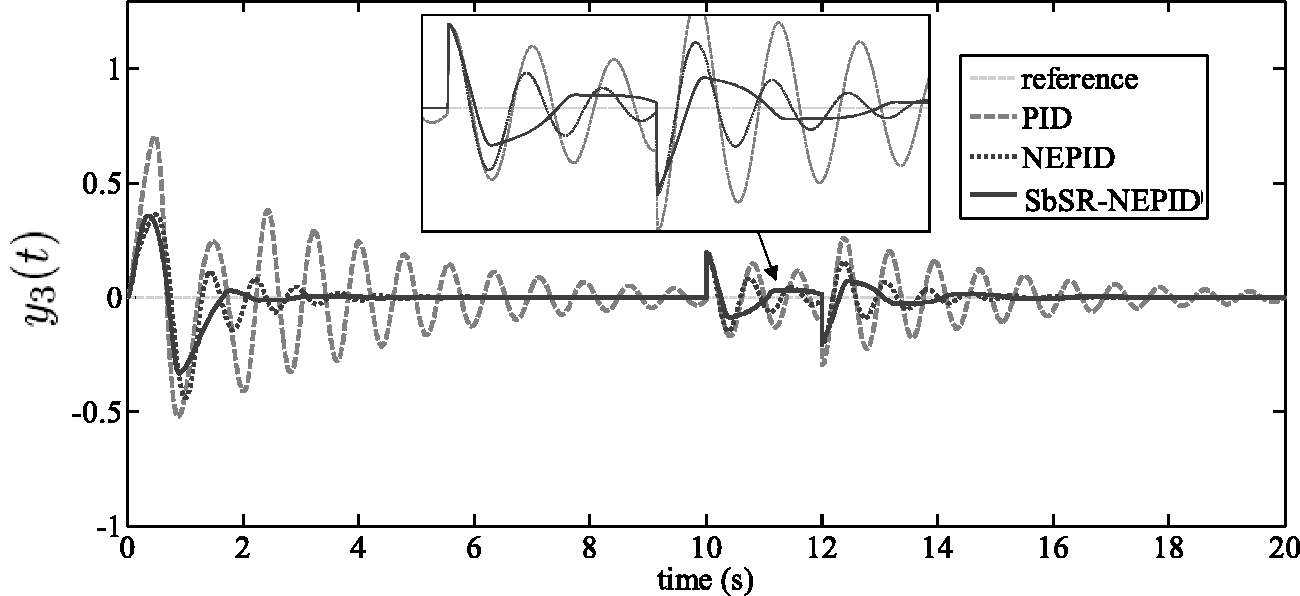
Sway angle
Conclusion
An improved NEPID controller for nonlinear MIMO crane system using a sigmoid-based secretion rate of hormone regulation tuning by SED algorithm has been presented. The research findings indicate that the sigmoid-based secretion rate of hormone regulation is effective in reducing the error during the transient state, and this contributes significantly to improved control accuracy. It has been shown that the proposed SbSR–NEPID controller outperforms the standard NEPID and the standard PID controllers in the perspective of control performance accuracy by achieving lower objective function, total norm error and total norm input even with the existence of disturbance. Moreover, it has been shown that the SbSR–NEPID controller has achieved control accuracy improvement of 5.12% as compared to standard NEPID controller.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research work was conducted with the support of Research Grant RDU170104 by Universiti Malaysia Pahang under Research and Innovation Department, and Ministry of Higher Education with reference no. FRGS/1/2017/ICT02/UMP/02/2.