
Abstract
Noise, as undesired sound, severely affects the quality of human life. Currently, active noise control method has demonstrated its capability in low-frequency noise cancellation and the advance in saving money and reducing weight and volume of related materials used in the passive noise control technology. The widespread configuration for active noise control technology is finite impulse response filter with filtered-x least mean squares (FxLMS) algorithm. However, the nonlinearities in the secondary path, which mainly arise from sensors, actuators and amplifiers used in the active noise control system, will cause instability and degrade the performance while using the FxLMS algorithm. In order to cope with this challenge, many new approaches have been proposed and fuzzy logic control is one of these. In this paper, a Takagi–Sugeon–Kang-type fuzzy logic control-based feedforward active noise control system with focus on the geometry configuration is introduced. In contrast to previous work, all physical paths are modelled by pure time delay transfer function and the acoustic feedback is added as part of inputs for the fuzzy logic control. Computational experiments are implemented within the Matlab/Simulink platform, and several case studies are presented with time and frequency domain analyses to demonstrate the cancellation ability of the proposed feedforward active noise control system and investigate the influence of distance ratio on the overall noise cancellation performance.
Introduction
Nowadays, with the fast development of industrialization and modernization, noise, defined as undesired sound, is becoming a critical problem, severely affecting the quality of human daily life.1,2 From the health perspective, long-time exposure to high noise levels could damage the hearing ability and sometimes might cause hearing loss. 3 Besides, noise could make people feel nervous/tired and affect the quality and quantity of sleep. 4 From efficiency perspective, noise can make people unsatisfied with the environmental condition, and this directly leads to low efficiency especially for workers in a factory. 5 In order to alleviate negative effects of noise, more and more attention is paid to noise cancellation for both narrowband noise and broadband noise. Currently, there are two main types of noise control method, passive noise control (PNC) and active noise control (ANC). 2
The PNC method mainly relies on passive technologies like absorption and insulation through several damping materials to attenuate the undesired noise, and it performs well for higher-frequency noise cancellation. The main principle of noise adsorption is to transform the acoustical energy into other form(s). 6 However, for most industrial acoustic waves, the main power is concentrated in the low-frequency range. Based on the relationship between the acoustic wavelength and frequency, the acoustic wavelength becomes larger at the low-frequency range and the corresponding result is that the size of corresponding absorption material required is increasing. Meanwhile, the weight of the material is also increasing, which makes the PNC method inconvenient and costly. 7
In order to overcome this problem, ANC has been proposed to attenuate low-frequency noise. The essential principle of ANC technology is superposition, while a secondary sound wave is generated to interfere with the primary sound wave and achieve noise cancellation at specified (observation) point(s). Compared with PNC method, it not only successfully demonstrates its capability for removing the undesired sound at lower frequencies but also is convenient and flexible 6 setting up. In the early 1930s, Lueg 8 used microphone and an electronically driven loudspeaker to successfully cancel the noise and proposed the concept of active noise control and later registered this as the patent in the USA. As a milestone work in the field of ANC, Leitch and Tokhi 9 discovered that geometrical arrangments have significant effects on the performance of noise cancellation in a three-dimensional propagation medium. They provided the framework of both feedforward and feedback ANC systems based on geometrical arrangments and deduced the corresponding mathematical expression for the required controller over the frequency range of interest. In this paper, the proposed fuzzy logic feedforward ANC system is based on Leitch and Tokhi’s framework. Prior studies have already shown that the ANC system involves three main parts, transducers, controller and acoustic/electrical paths.9,10 Among these parts, the controller is the essential part to generate the anti-noise by adjusting the amplitude and phase of each frequency component of the detected primary noise. In fact, the noise source is changing with time and covers a wide range of frequencies. Therefore, the controller must be adaptive to minimize the residual error by adjusting its coefficients. Currently, there are two kinds of adaptive filters widely used in ANC systems 2 : linear and nonlinear. For the linear adaptive filter, the widespread configuration is finite impulse response (FIR) filter using the filtered-x least mean squares (FxLMS) algorithm and the biggest advantage is simplicity. However, nonlinearities that exist in the primary path, and transducers such as sensors and actuators employed in the secondary path, might make the transversal filter-based ANC scheme fail to mitigate the effect of noise. 2 Therefore, several nonlinear algorithms have been proposed to solve this problem such as Volterra FxLMS algorithm, 11 bilinear FxLMS algorithm 12 and filtered-s LMS algorithm. 13 Besides, in order to improve the overall noise cancellation performance, neural-network-based ANC adaptive structures have been proposed 14 such as fuzzy inference systems 15 and neural-fuzzy systems. 16 Kipersztok 17 applied fuzzy logic to the ANC technology to replace the traditional linear method for broadband noise cancellation. Chang and Shyu 15 proposed fuzzy adaptive FxLMS algorithm. They used fuzzy FxLMS algorithm to replace the conventional FxLMS algorithm to improve the convergence speed. However, they did not consider the effect of acoustic feedback and physical separation between sources and transducers though they used pure time delay to model a duct plant. In this paper, Takagi–Sugeon–Kang (TSK) type fuzzy logic-based feedforward ANC system with consideration of distance ratio and acoustic feedback is proposed to investigate the influence of different distance ratios on overall noise cancellation performance. The acoustic feedback and the error signal are used as input variables for the TSK-type fuzzy logic controller to generate coefficients for the adaptive filter.
The rest of the paper is arranged as follows. In the next section, detailed descriptions based on Leitch and Tokhi 9 about the geometry-related constraints are given to lay a foundation for the new development. Then, a brief description of the fuzzy logic controller is presented, especially with a focus on the membership functions and the fuzzy ‘if-then’ rule. This is followed by a section where the TSK-type fuzzy logic feedforward ANC system is introduced with inclusion of acoustic feedback and distance ratio. In the simulation section, several computational experiments are conducted to bench test the cancellation feasibility of the proposed ANC system and explore the influence of distance ratio on the overall noise cancellation performance. Finally, related conclusions and future prospects are presented.
System description with geometry-related considerations
Figure 1 displays the feedforward ANC system with consideration of geometrical arrangement, firstly proposed by Leitch and Tokhi for noise cancellation in the three-dimensional linear propagation medium.9,18–20 The primary source emits an unwanted acoustic wave. It can be detected by the detector, which is placed at a distance
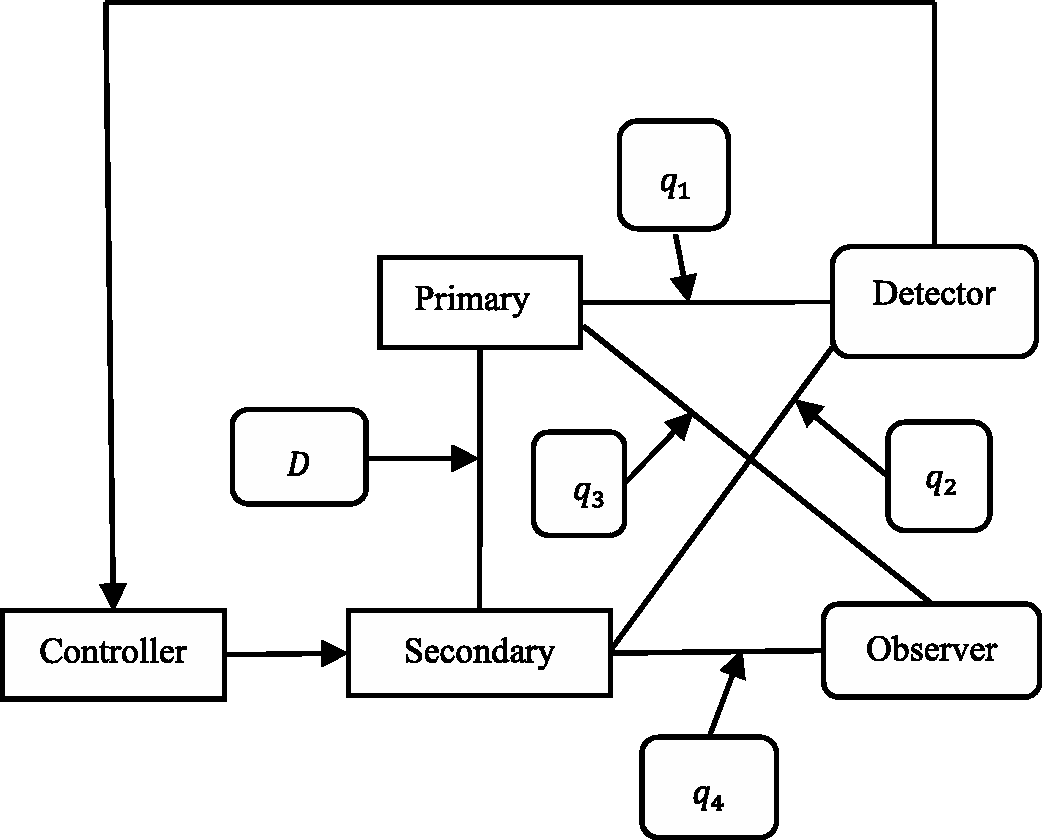
Schematic diagram of feedforward ANC system.
9
Figure 2 displays the equivalent block diagram in the complex domain. The objective with the feedforward system is to reduce the noise pressure level to zero at the observation point. Therefore, the secondary acoustic wave must have the same amplitude and opposite phase compared with the primary acoustic wave at the observation point. This is mathematically expressed as


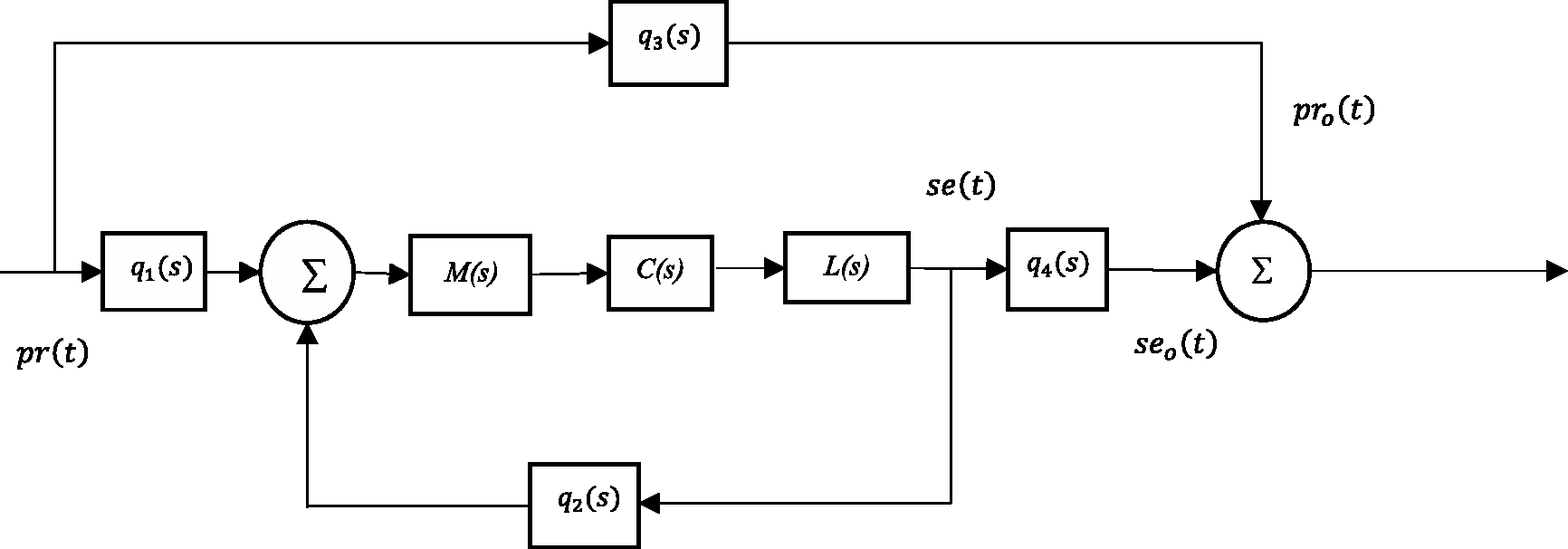
Block diagram of feedforward ANC system.
The frequency response

The frequency response

The (s) can be further expressed as

Manipulating equations (2) to (5), yields

Equation (6) is the required transfer function of the controller for optimum cancellation over the frequency range of interest and it illustrates that the characteristics of the controller depend on the transfer characteristics of transducers and acoustic paths.
As stated above, this kind of ANC system is constructed based on the geometrical arrangement. Therefore, two geometrical constraints should be notified while using this feedforward ANC system. Firstly, the acoustic delay should be longer than the electrical delay, which means that the observer should be placed closer to the secondary source compared with the primary source. Thus

In Figure 1, the secondary path, defined as the acoustic path between the secondary source and the observation point, attempts to compensate for the primary path, defined as the acoustic path between the primary source and the observation point, to ensure that cancellation occurs at the observation point. Equation (7) implies that under such condition, there is enough time for the controller to process the detected signal to generate the secondary signal to drive the loudspeaker.
Secondly, the distance ratio is important. As can be seen from equation (6), any change in the location of the detector or the observer with respect to the noise sources will be reflected in the transfer function for the controller. The critical geometrical condition for optimal cancellation performance can be expressed as

Using equations (6) and (8), it can be shown that that the controller will have an infinite gain, under the condition in equation (8), for the noise level at the observer point to be reduced to zero. However, this cannot be realised in real life or in the simulation experiments. Despite this, it is interesting to explore the impact of distance ratio on overall noise cancellation performance. Furthermore, the corresponding results will provide insight into geometrical arrangment in real-life experiments.
Furthermore, the acoustic feedback path noted in Figure 2 will affect the system stability and noise cancellation performance. The cause for the acoustic feedback and how to eliminate its negative effect will be discussed in a later section.
In summary, the feedforward ANC system proposed by Tokhi and Leitch 9 provides a fundamental part for the research study in this paper.
Fuzzy logic control
Introduction
Fuzzy logic control (FLC) or fuzzy inference system (FIS) is a commonly used soft computing technology for modelling complex systems in the real world as it has a wide application.24,25 The fundamental part of FIS is fuzzy sets and fuzzy logic while it works with imprecise reasoning and linguistic rules obtained by the designer who is experienced human expert with enough capacity of expert knowledge 26 to improve the system tolerating ability of imprecision. 27 The main advantage of FIS is that it can improve the reasoning and inference ability.
A FLC mechanism consists of four parts, fuzzification, knowledge base, inference engine or fuzzy logic reasoning and defuzzification. Fuzzification is aimed at transforming the measured crisp values to corresponding linguistic values based on defined membership functions. For example, ‘the temperature is 30 degrees’ will corresponding to ‘the temperature is high’. The knowledge base can be divided into two subparts, the rule base part and the database part. The database refers to the membership function, while the rule base denotes a set of IF-THEN rules. Here, according to the type of consequent following the keyword ‘THEN’, the FIS can be broadly divided into two types. The first type uses fuzzy reasoning while both antecedent and consequent parts are fuzzy values and the system behaviour is described in the natural linguistic words. This is referred to the Mamdani model. The second type uses the rule structure that only the antecedent part uses the fuzzy and linear mathematical functions are used in the consequent part. This representation is the TSK-type. The inference engine or fuzzy logic reasoning part in the FIS imitates human thinking and reasoning. The aim of this step is to generate the fuzzy output from the fuzzy input through the inference rules. Defuzzification is to transform the fuzzy output to the crisp output. For FLC, there are two critical factors needed to be focused on, the membership functions selection and the rule map, and these will be detailed in the sub-section below.35,36
Membership functions
In fuzzy logic theory, membership functions (MFs), denoted as
Triangular-shaped
A triangular-shaped MF is mathematically represented as
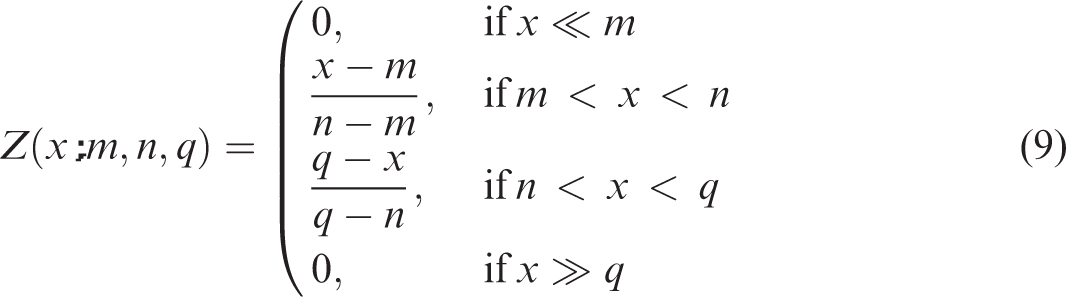
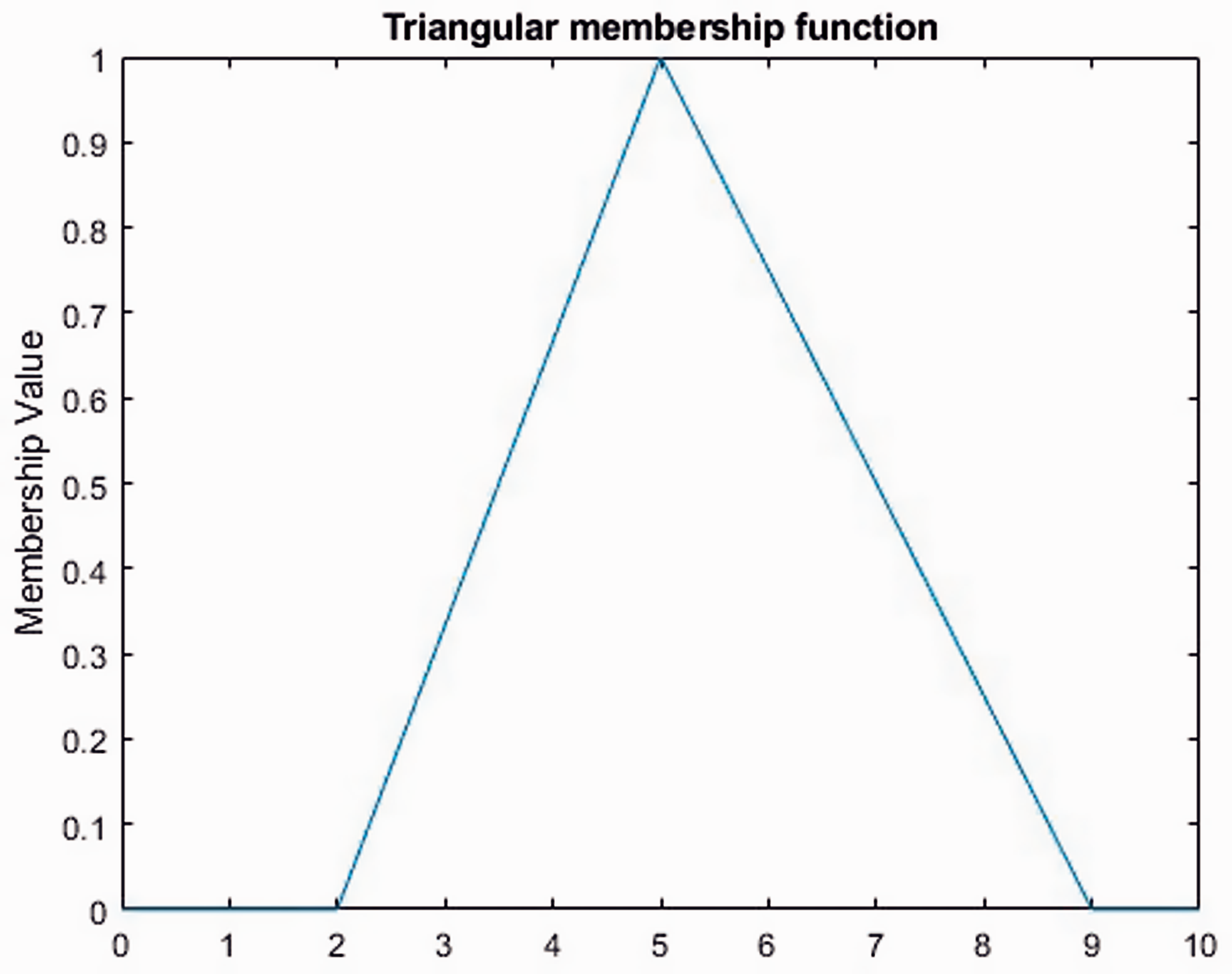
Triangular-shaped MF.
Trapezoidal-shaped
A trapezoidal-shaped MF can be expressed mathematically as
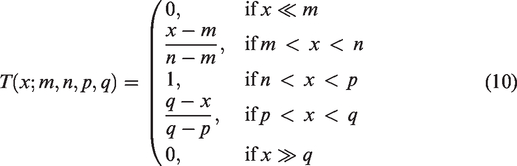
where
Trapezoidal-shaped MF.
Both triangular-shaped and trapezoidal-shaped MFs are simple in form; as seen in Figures 3 and 4, they are composed of simple linear segments. The triangular-shaped MF can be thought as a specific form of the trapezoidal-shaped MF and both are widely used in real-life due to their simplicity and computational efficiency. However, the drawback of these two MFs is lack of smooth transition, especially at the corner points. 28
Gaussian-shaped
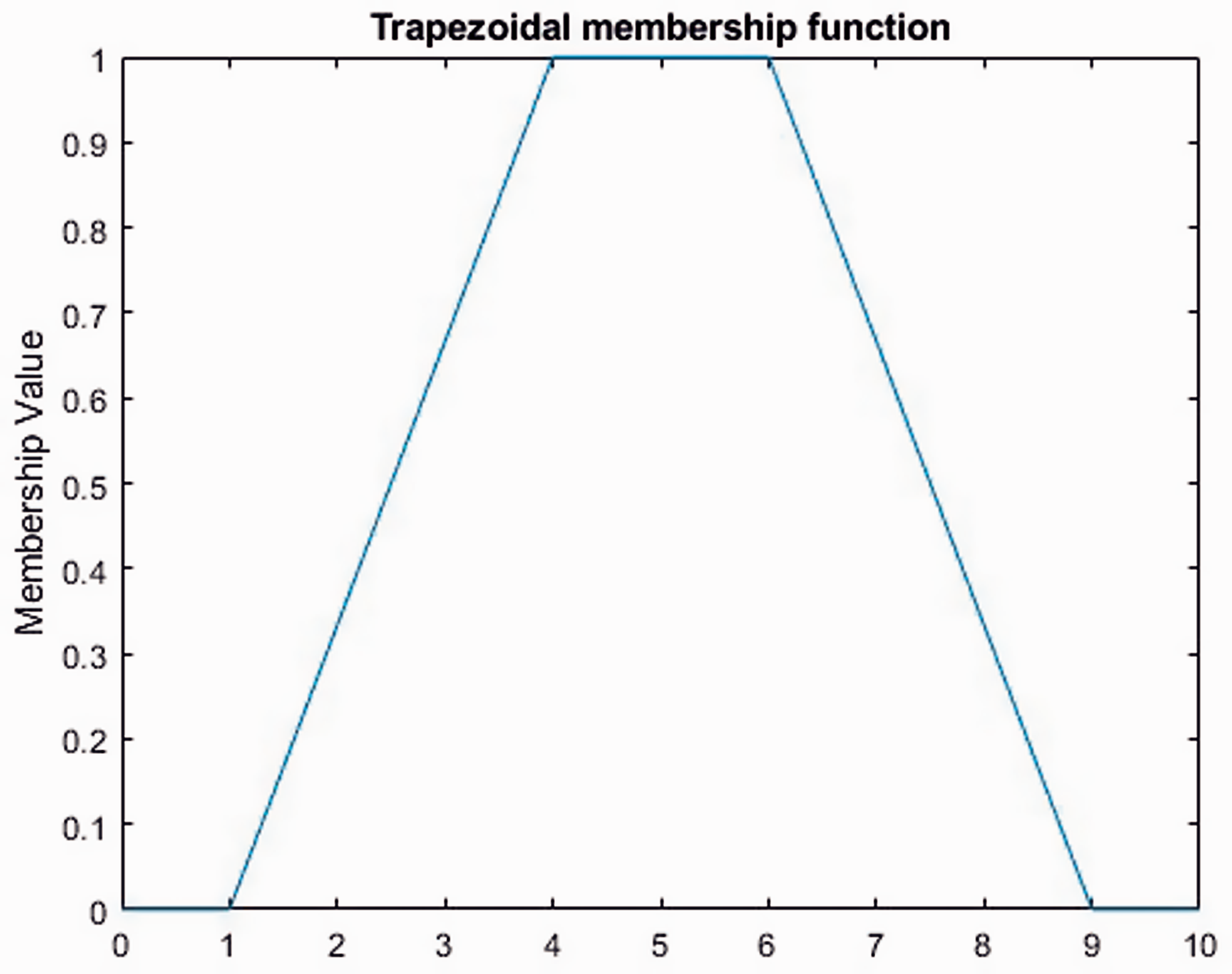
A Gaussian-shaped MF can be expressed mathematically as

Gaussian-shaped MF.
Bell-shaped
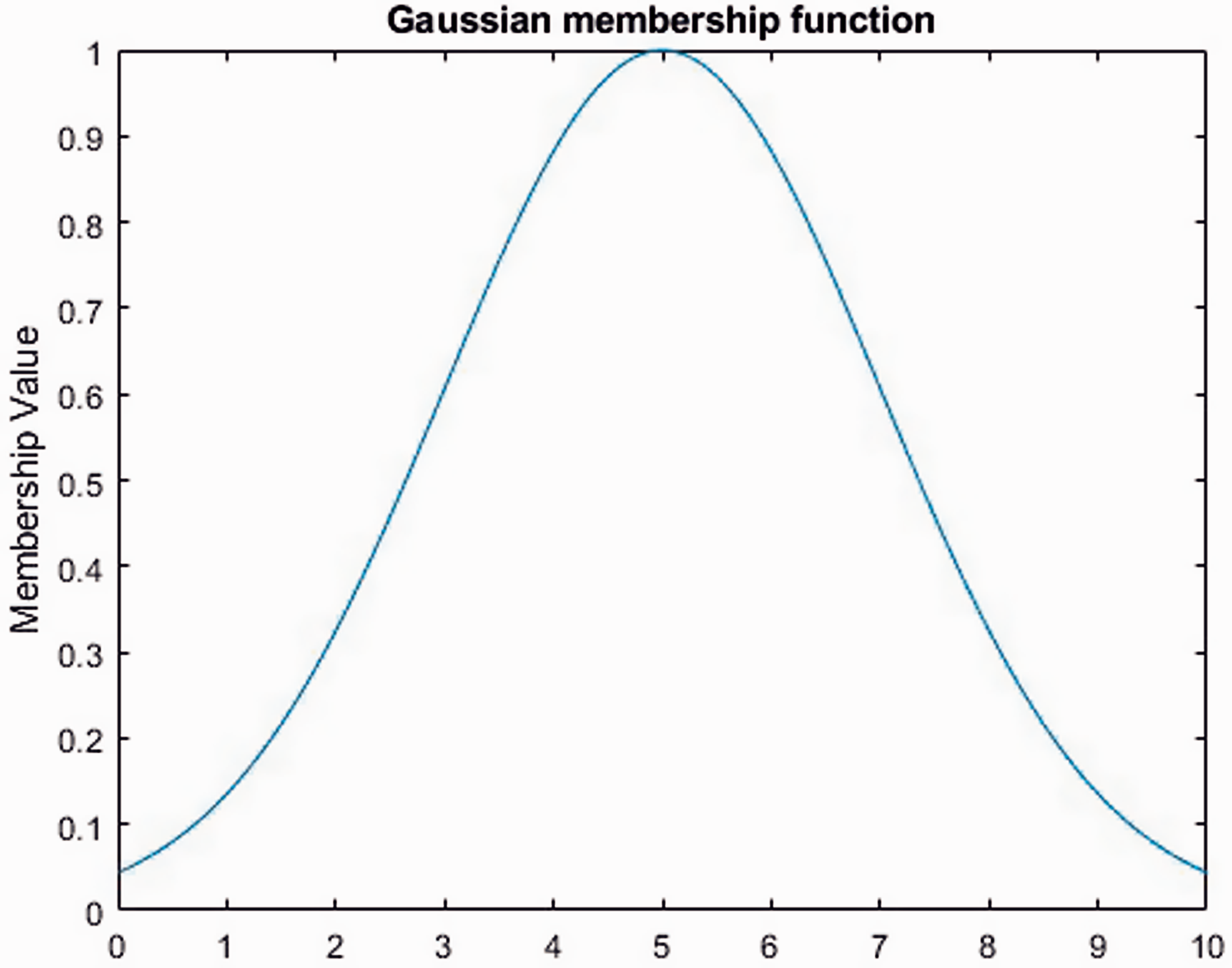
A bell-shaped MF can be expressed as

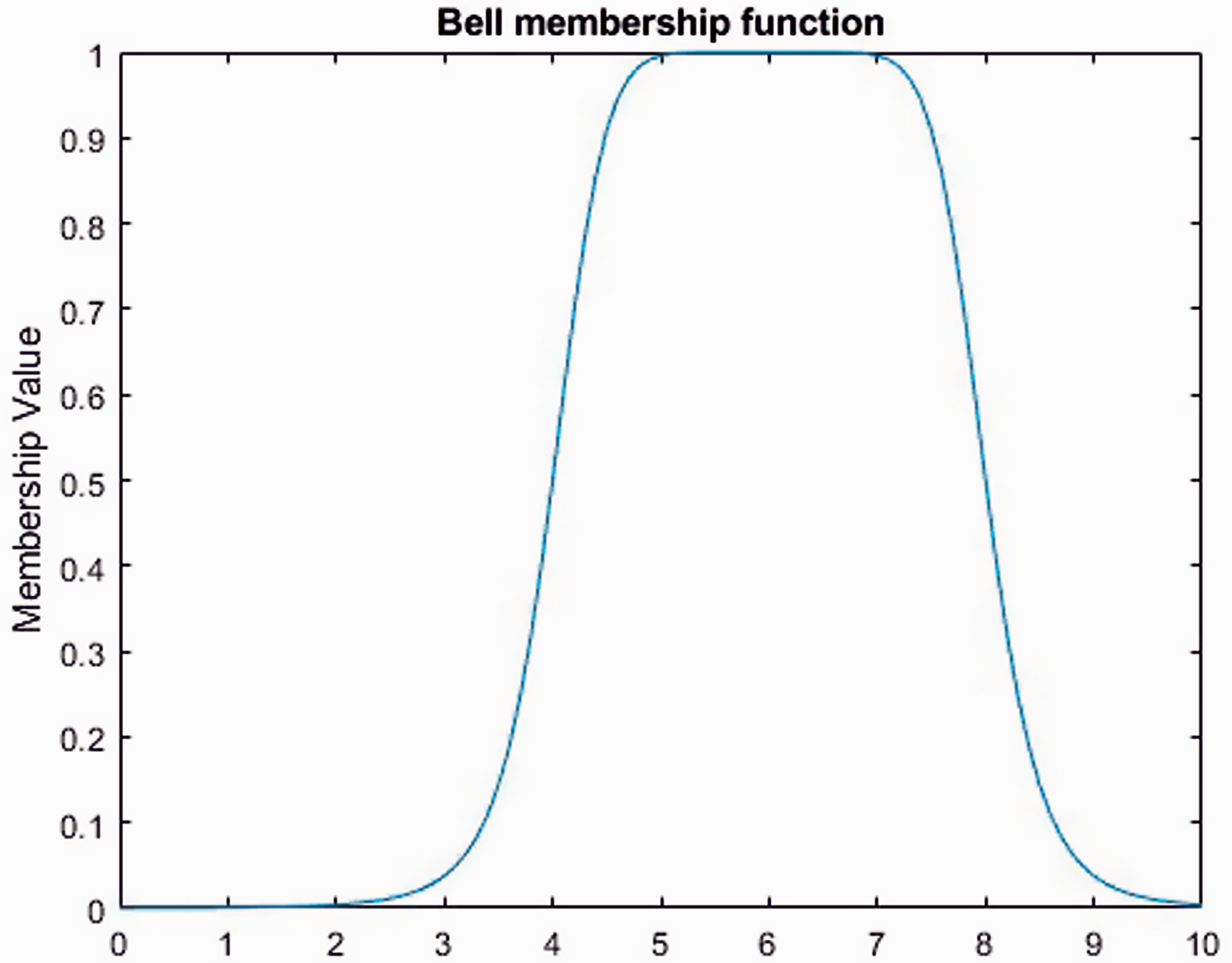
Bell-shaped MF.
In contrast to the MFs in Figures 3 and 4, the Gaussian-shaped and bell-shaped MFs, shown in Figures 5 and 6, respectively, are nonlinear and smooth. Besides, compared with the Gaussian-shaped MF, the bell-shaped MF has one additional parameter, which provides one further freedom for parameter tuning.
Rule base
In order to concisely imitate human’s thinking and reasoning, the main approach in FLC for description or evaluation of the dynamic behaviour of a system is to use a set of linguistic descriptions containing linguistic variables and linguistic values. These linguistic descriptions are based on expert knowledge and the typical form of the expert knowledge is: ‘IF condition Then consequence’
The ‘condition’ following the keyword IF is the premise/antecedent part, while the ‘consequence’ following the keyword THEN is the conclusion/consequent part. For the fuzzy inference engine, ‘if-then’ rule is the main method on which it relies to imitate human reasoning and thinking. As mentioned earlier, there are two main types of fuzzy if-then rules, Mamdani-type and TSK-type. The basic and essential difference between these two types is the way to generate the crisp output from the fuzzy input. The Mamdani-type uses the defuzzification technology which guarantees the intuitive interpretability. The TSK-type, on the other hand, uses the weighted average to generate the crisp output, and is the most powerful tool for modelling a nonlinear dynamic system. Therefore, in this paper, the TSK-type fuzzy logic is adopted for solving any potential nonlinearities in the feedforward ANC system.
The classical form of TSK-type if-then rule is
then

The output form of the TSK model is calculated as


where
TSK-type fuzzy logic0based feedforward ANC system with geometric consideration
The research outcomes from Leitch and Tokhi 9 have shown that the influence of geometrical arrangement of system components on the noise cancellation performance is significant in a three-dimensional linear propagation medium. Meanwhile, the TSK-type FLC has shown superior ability working with adaptive techniques and is an optimal method for dynamic nonlinear systems. Therefore, the TSK-type fuzzy logic feedforward ANC system based on geometrical arrangement is proposed, and the structure of the proposed fuzzy logic feedforward ANC system is displayed in Figure 7.
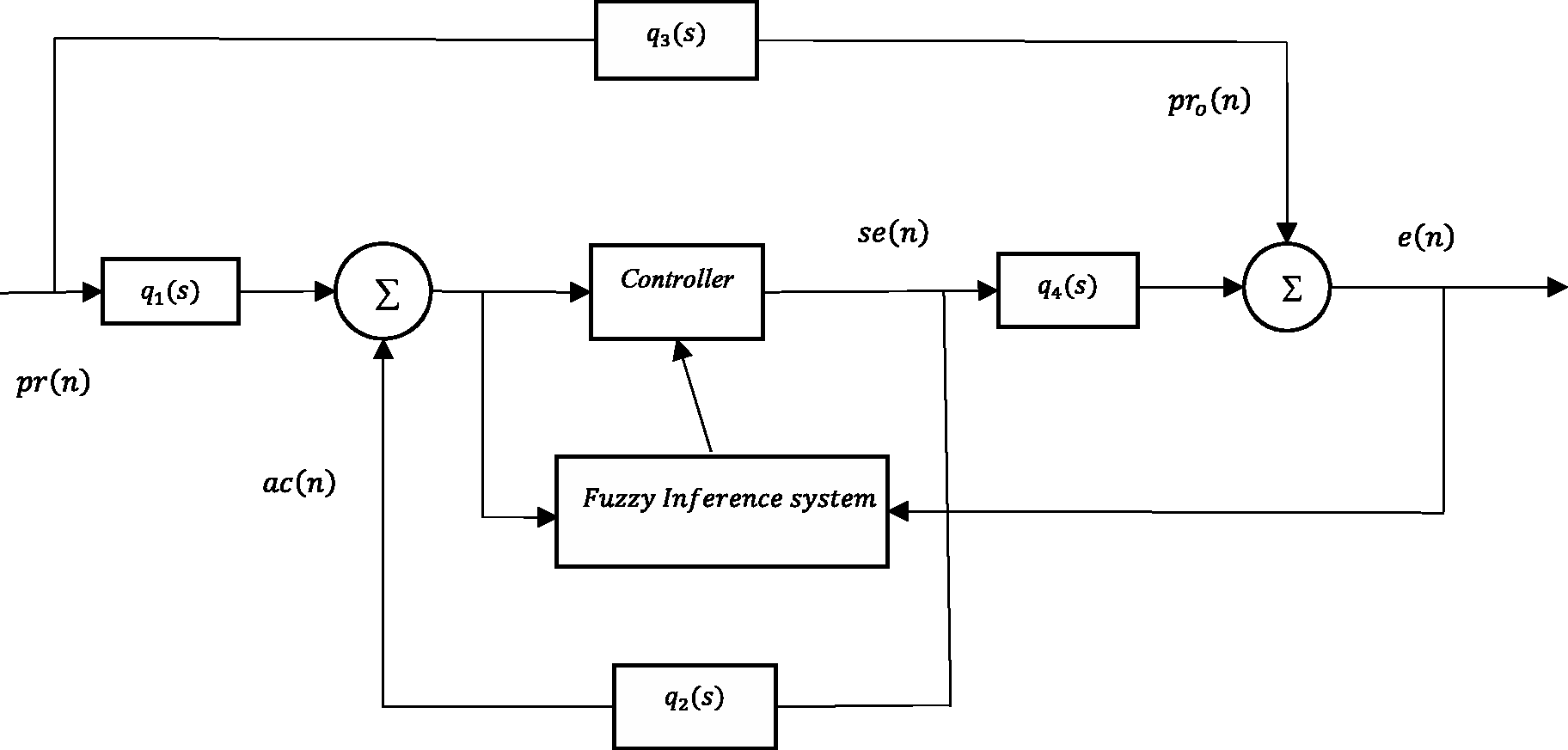
Structure for TSK-type fuzzy logic feedforward ANC system based on the geometric configuration.
Here, the controller takes the form of an adaptive FIR filter due to its concise structure. 2 In contrast to the previous structure, there are two novel points for this proposed feedforward ANC system analysed below.
Geometric configuration
As can be seen in Figure 7, four acoustic paths,


TSK-type fuzzy logic and acoustic feedback
The TSK-type FLC is used in Figure 7. There are several merits in using the TSK-type FLC. Firstly, the TSK-type is widely popular and the most useful technology. Secondly, its superior behaviour has already been demonstrated while cooperating with optimization and adaptive techniques, especially in nonlinear control systems. It can use a small number of rules to describe the dynamic behaviour of a highly complex nonlinear system. A step-by-step description of implementation of the adaptive process is given below.
Step 1: Select the input and the output variables
In this system, there are two input variables for the premise part: the acoustic feedback signal
Step 2: Choose the membership function and the linguistic value
For the proposed FLC, the trapezoidal membership functions (MFs) is used due to its simplicity. The linguistic value for the first input variable, error signal, is easier. Based on several kinds of literature17,29 and the definition of the error signal, five different fuzzy sets are employed in this system. Table 1 provides details of the linguistic values used. 30
Linguistic value for the error signal e(n).

The acoustic feedback signal
Linguistic value for the acoustic feedback ac(n).

Step 3: Confirm the fuzzy rules
In this system, the range of the error signal is divided into five subsets and the range of the acoustic feedback is divided into six subsets. Therefore, the number of fuzzy rules is 30 and the corresponding details are provided in Table 3.
Rule map.
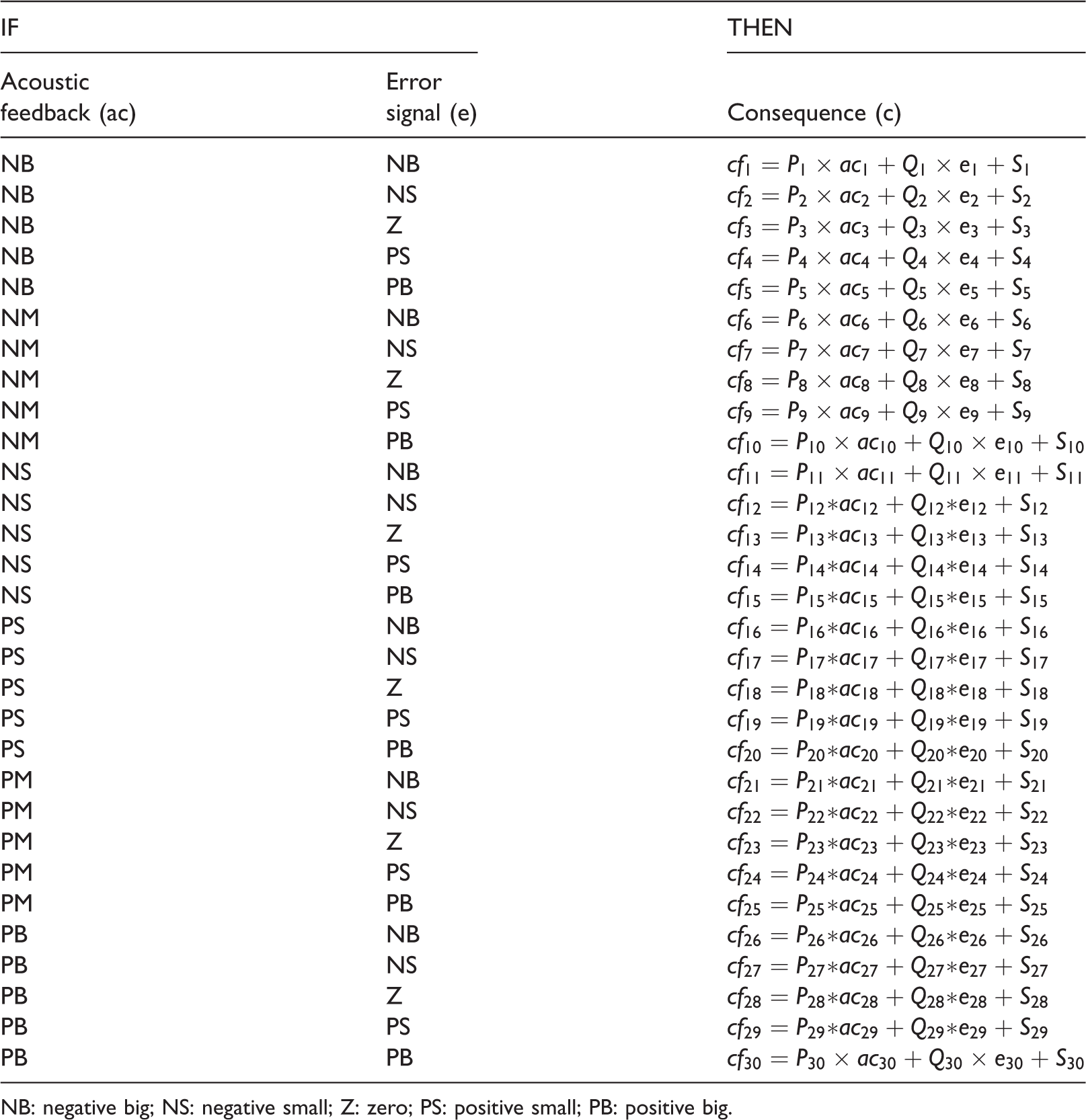
NB: negative big; NS: negative small; Z: zero; PS: positive small; PB: positive big.
According to equations (14) and (15), the output is calculated as

Case studies and simulation results
In this section, three computational experiments, namely feasibility tests with the proposed scheme, effects of distance ratio for narrowband cancellation, and effects of distance ratio for broadband cancellation, are conducted using Matlab/Simulink platform. In order to reduce the computational burden and simplify the optimization process, but not losing generality with focus on the effect of the distance ratio on the noise cancellation performance, the zero-order TSK-type FLC is used in the simulation process. All the simulation cases use sampling frequency of 1/1000 Hz and the simulation time for each case is 5 s.
Case 1: Feasibility tests
The first case study is to benchmark the noise (with both narrowband and broadband) cancellation effects of using the proposed TSK-type fuzzy logic feedforward ANC scheme. Table 4 summarizes the type of primary noise and corresponding example. The case study uses both time and frequency domain plots to illustrate the simulation results.
The type and example of primary noise.

The results in the Figure 8(a1) and 8(a2) are time domain and frequency domain for the narrowband noise cancellation while using the proposed ANC system. From time domain analysis, as noted the amplitude for the cancelled wave is 0.89, while the amplitude for the original wave was 1. The percentage of cancellation thus was 11%. From the frequency domain analysis, the percentage of cancellation was 11.89%. Both analyses demonstrate the cancellation capability of the proposed ANC system for the narrowband noise.
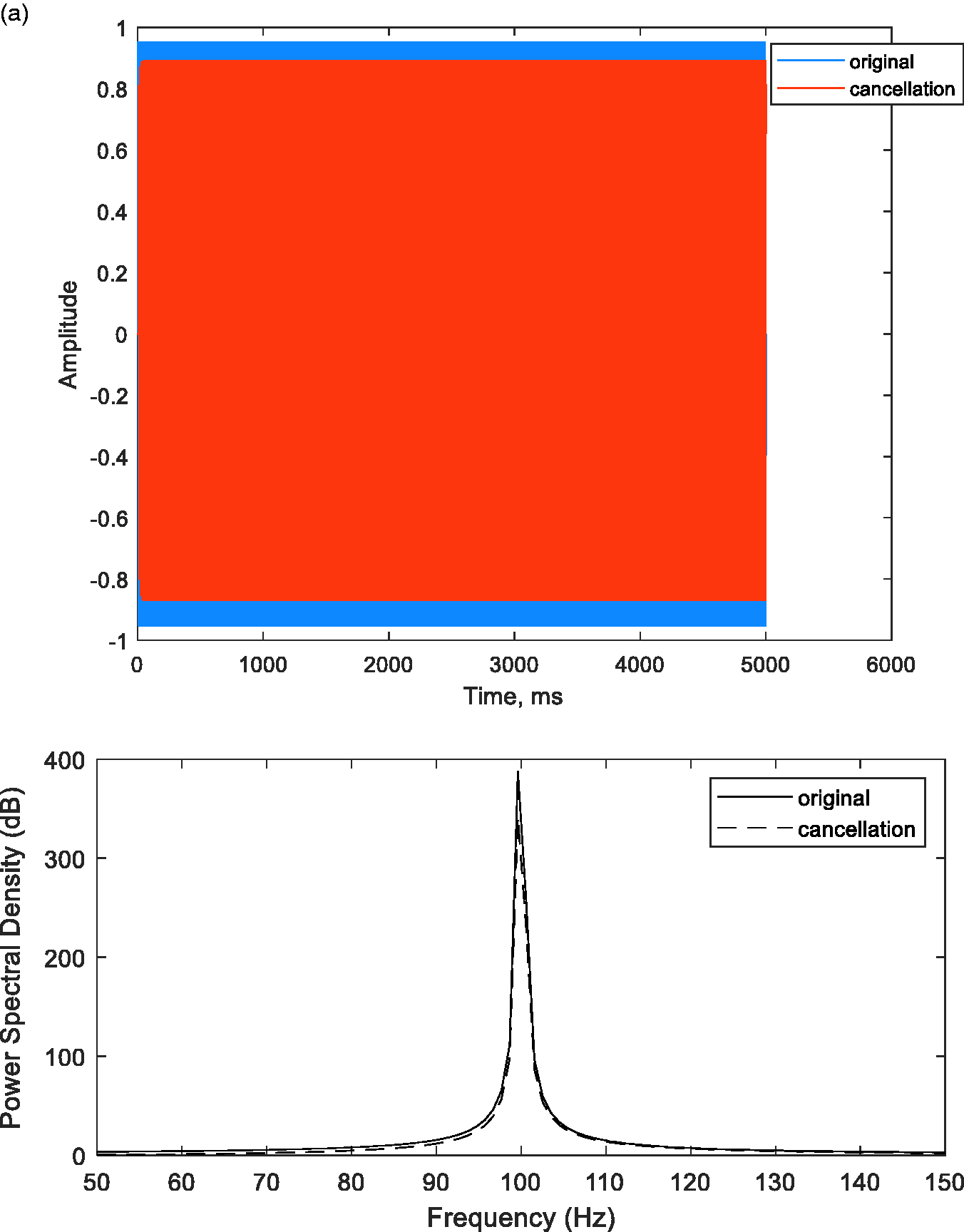
Validation results. (a) Narrowband noise (b) broadband noise.
The results in Figure 8(b1) and 8(b2) are the cancellation performance for the broadband noise in both time domain and frequency domain. The cancellation performance for the broadband noise is complex compared with the narrowband noise. For time domain analysis, for example, the difference in the amplitude between the original noise wave and the cancelled wave at 1500 ms was roughly 1.6, the percentage was approximately 48.5%, and the percentage at 1900 ms was only 5.9%. For frequency domain analysis, the percentage of the cancellation could reach approximately 30% at 60 Hz while only around 10% at 68 Hz.
Generally, the simulation results in Figure 8 demonstrate the cancellation capability of the proposed feedforward ANC system for both narrowband noise and broadband noise.
Case 2: Effects of distance ratio for narrowband cancellation
The second simulation is to investigate the influence of distance ratio for the narrowband noise while using the TSK-type FLC feedforward ANC system. As discussed previously, three different distance conditions exist in real life. The first condition is that the value of the distance ratio for the detector is smaller than one. This implies that the detector is placed close to the primary source. The second condition is that the value of the distance ratio for the detector is greater than one but smaller than the value of the distance ratio for the observer. This means that the detector is close to the secondary source. The third condition is that the distance ratio for the detector is greater than the value of the distance ratio for the observer.
In Figure 9, it is clear that for the narrowband noise, different distance ratios have different effects on the overall noise cancellation performance. The difference exists in both amplitude and frequency. For amplitude, the optimal condition is that
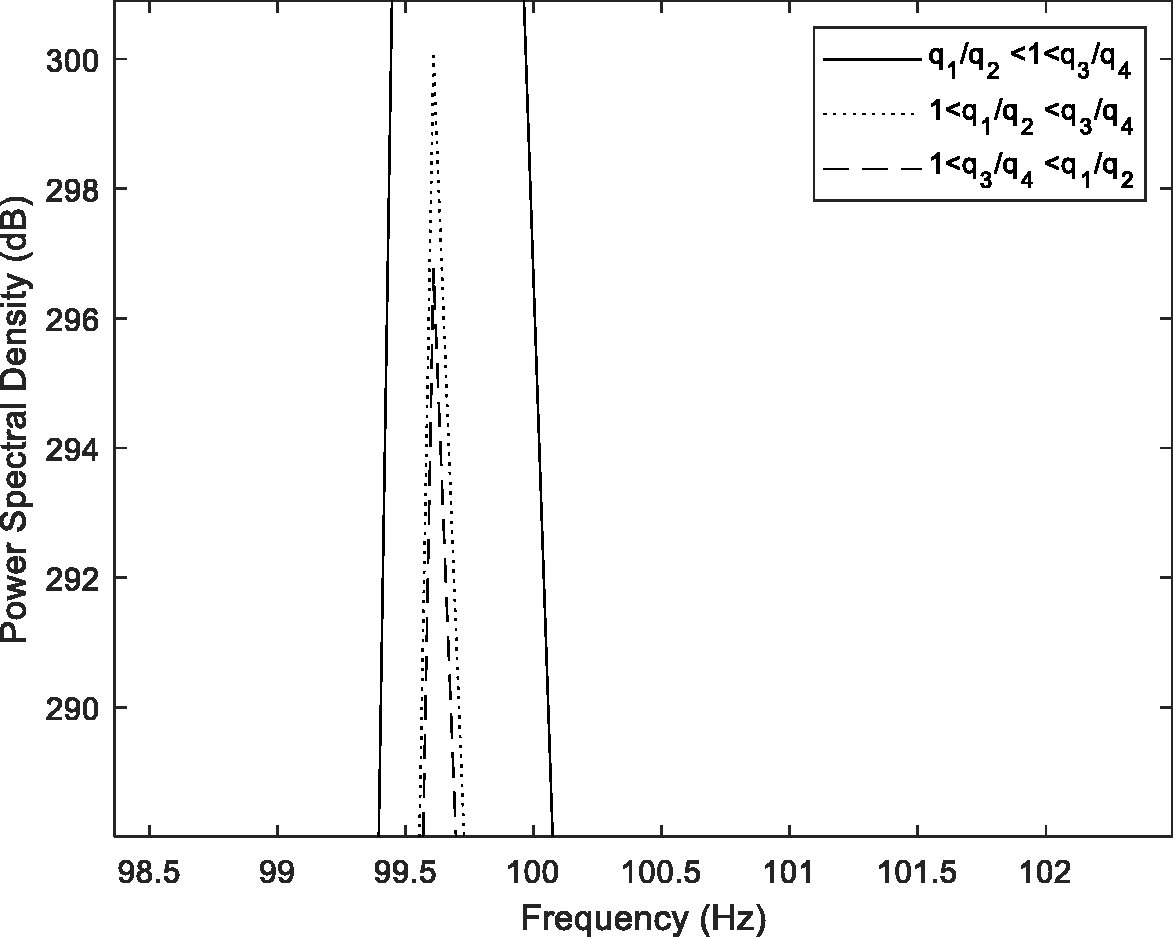
Comparison results for different distance ratios for narrowband noise cancellation.
Case 3: Effects of distance ratio for broadband cancellation
The third simulation is to investigate the influence of distance ratio for broadband noise while using the TSK-type FLC feedforward ANC system.
The simulation results in Figure 10 reveal that the situation for the broadband noise is more sophisticated than the narrowband noise. Firstly, similar to the frequency analysis of the narrowband noise cancellation, the frequency mismatch exists and the main reason is possibly due to the different physical distances and the process of sampling. Secondly, for the broadband noise cancellation, the effect of distance ratio is significant and the optimal distance ratios for different frequency ranges are different. For example, the best distance ratio between 7 Hz to 14 Hz is
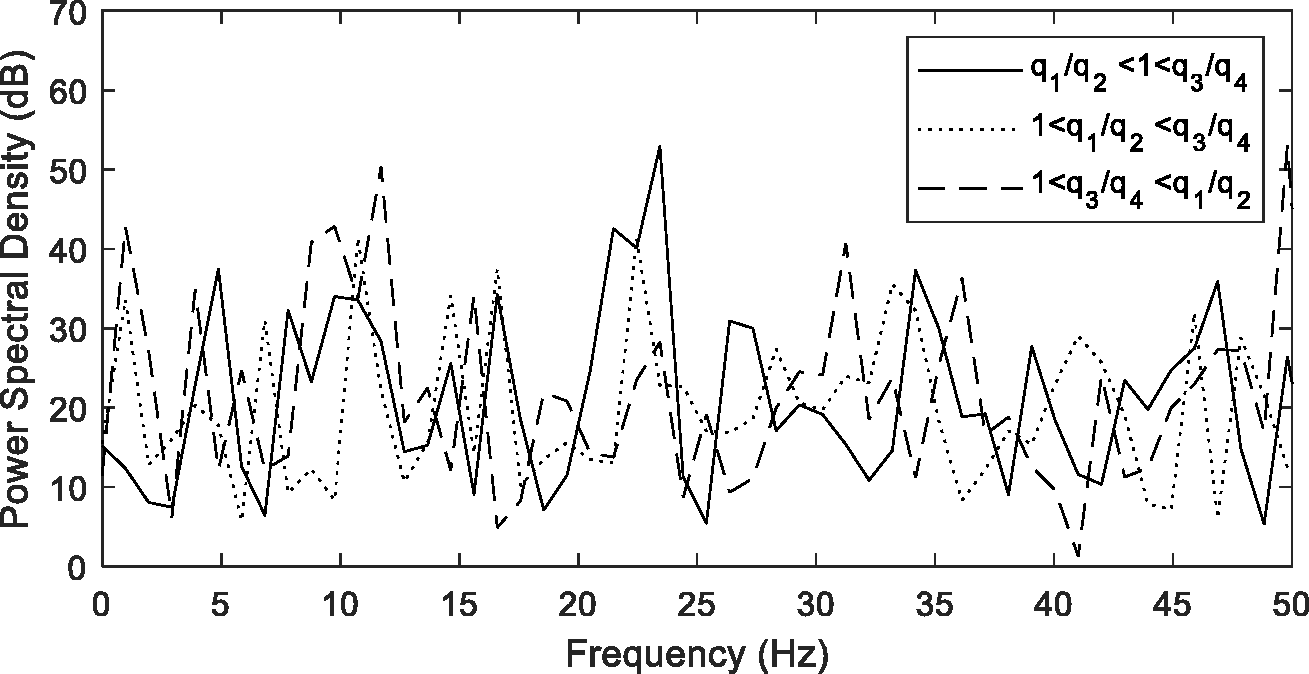
Comparison results for different distance ratios for broadband noise cancellation.
Conclusion
The study has developed a scheme of FLC-based feedforward ANC with due consideration of distance ratio and acoustic feedback, and has validated the designed procedure though three computational experiments. The first case is to demonstrate the capability of noise cancellation for the proposed fuzzy logic-based ANC system for both narrowband noise and broadband noise cancellation. Simulation results from both time domain and frequency domain analyses demonstrate that the proposed feedforward ANC system can implement the task of cancellation, and the cancellation performance for the broadband noise is more complicated than the cancellation performance for the narrowband noise. The second and the third cases discuss the influence of distance ratio for the overall noise cancellation. The results reveal that the effect of different distance ratios on the noise cancellation performance is distinct and the optimal distance ratio for the different types of noise is different. Generally, the performance of the fuzzy logic-based ANC system is better, and future work will investigate this from two aspects. Firstly, as the current work has used zero-order TSK-type FLC with the aim of focusing on investigating the effect of the distance ratio, further work on establishing the impact of employing the linear equation at the consequent part with optimised parameters on cancellation performance will be carried out. Secondly, to investigate the regional optimal distance ratio for different noise sources and solve, the frequency mismatch problems in the TSK-type fuzzy logic feedforward ANC system.
Footnotes
Declaration of conflicting interests
The author(s) declare no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.