
Abstract
In this study, the input power flow problem of the cylindrical shell with complex acoustic boundaries was investigated. According to the acoustic characteristic of control domain which combination free interface and rigid wall interface at the same time for the cylindrical shell, the double reflection method and mirror image method were applied, and the analytical function of the input power flow for the cylindrical shell was derived. Finally, a cylindrical shell in the quarter-infinite acoustic space for example, the numerical calculation of input power flow of cylindrical shell was carried out. The influences of acoustic boundary characteristics, location, and frequency on the input power flow were compared. In addition, the effectiveness and convergence of the proposed method was verified using finite element method.
Introduction
The cylindrical shell structure was widely used in underwater engineering areas, such as shipbuilding, pipelines, and offshore platforms. Studies on the vibro-acoustic problem of the cylindrical shells or stiffened cylindrical shells have recently been the focus of considerable attention, which involved theoretical analysis, numerical calculation, and experimental investigation. Among them, on the basis of the wave propagation method, Zhu 1 proposed a new analytical method to nondestructively predict the elastic critical acoustic radiation of a submerged cylindrical shell. Oliazadeh and Farshidianfar 2 and Oliazadeh et al. 3 investigated the free vibration of cylindrical shells by different cylindrical shell theories; and the numerical simulations analysis and experiments measurement were compared. Loock et al. 4 examined the underwater acoustic radiation problem of cylindrical shells in a low-frequency tube to validate the results by numerical analysis. Zhou et al. 5 investigated the free vibration problem of cylindrical shells for a general class of elastic support boundary conditions considering deep-water pressure. Chen et al. 6 discussed the effect of fluid viscosity on the vibration dispersion characteristics of an infinite cylindrical shell immersed in a viscous acoustic medium, and the hydrostatic pressure was considered in the motion governing function. Caresta and Kessissoglou 7 defined the submarine structure as a cylindrical shell with ring stiffeners and internal bulkheads; the structural dynamic responses of the submerged cylindrical shell were calculated by solving the governing motion equations using a wave approach, and the conical shell equations are obtained using a power series solution.
The parameters to describe vibro-acoustic characteristic of continue structure include dynamic stress, dynamic response (displacement, velocity, or acceleration), dynamic force, acoustic pressure, acoustic radiation power, nature frequency, and vibration power flow. Among them, power flow contains the amplitude of force and velocity vector, and the phase relationships between them were included. Power flow parameter provides a comprehensive evaluation index of the vibration process and energy transmission mechanism. The concept of power flow was first presented by Goyder and White8,9; it is very suitable to describe the vibro-acoustic problem with power flow parameters. Presently, for power flow calculation, the main methods include theoretical analysis, numerical calculation, and experimental measurement. Much of research results about vibration power flow problem were carried out. Choi et al. 10 applied higher order sandwich theory in conjunction with an equivalent mobility-based power flow progressive method to determine power flow for a sandwich-configured floating raft vibration isolation system. For the submerged cylindrical shells, the wave propagation approach was often used to study the vibro-acoustic problem. Xu and Zhang 11 discussed the vibration power flow in an infinite elastic cylindrical shell filled with a fluid in which the input power flow and the power flow transmission characteristics depend on the free propagating wave propagation approach. Yan et al. 12 used Flügge cylindrical shell theory and Helmholtz acoustic equation to deal with the vibro-acoustic problem of cylindrical shell with damping material distribution, in which the damping characteristics of structure materials were considered using the complex modulus method. Yan et al. 13 used input power flow from a cosine harmonic line force into a submerged infinite cylindrical shell, which was reinforced by double periodic supports of rings and bulkheads. Fuller 14 investigated the forced input mobility of an infinite elastic cylindrical shell filled with a fluid medium. The spectral equations of motion of the shell–fluid system and the residue method were employed to evaluate mobility, and their physical interpretation was also discussed. Sorokin and Ershova 15 used Green’s matrix and the boundary integral equation to analyze free plane wave propagation in infinitely long periodic elastic structures with or without considering heavy fluid loading.
Helmholtz equation is an efficient tool to analyze the vibro-acoustic problem. However, the analytical solution of the acoustic Helmholtz equation in free space can be applied to only a small number of simple structures problem, such as the simply supported plate structure, spherical shells, an infinite periodic cylinder shell, and so on. In many practical acoustic radiation problems, the acoustic boundary conditions may be irregular or complicated, and these acoustic boundary conditions may affect the acoustic radiation characteristics. On compliant boundary surfaces, the acoustic pressure is dismissed (zero acoustic pressure), whereas the acoustic wave was reflected on the rigid wall surfaces (zero normal velocity). Thus, the influence of the acoustic boundary characteristics, particularly its effect on the control acoustic domain, must be considered in the vibro-acoustic problem. Many studies have analyzed the influence of the acoustic boundary characteristics. Liu and Huang 16 discussed the influence of rigid or compliant acoustic boundaries on the acoustic radiation characteristic of the cylindrical shell in the half-space domain. O’Neil et al. 17 developed a new hybrid representation that uses a finite number of real images (dependent only on the source location) coupled with a rapidly converging Sommerfeld-like integral. Hasheminejad and Azarpeyvand18,19 investigated the cylindrical shell radiation problem in the three-dimensional (3D) half-space domain; the convergence of the Hankel functions is examined as well. By deriving acoustic radiation equations for a cylindrical shell with free and rigid wall surfaces, Ye et al. 20 examined the acoustic radiation problem of a cylindrical shell with complex acoustic boundary conditions. A semi-analytical method function of acoustic radiation for cylindrical shell which subject to a line-distributed harmonic excitation was discussed by Guo et al. 21 Chan et al. 22 discussed the wave reflection problem in a corner domain while considering the simply supported or roller-supported boundary conditions. The structural–acoustic radiation problem of cylindrical shells was solved using the double reflection method, in which the acoustic boundary conditions consist of a free surface and a rigid wall surface in a quarter-infinite domain.23,24 However, there are few research results on the input power flow characteristics of cylindrical shells with complex acoustic boundaries. In the present research, the input power flow problem of cylindrical shell with complex acoustic boundaries conditions was investigated. The input power flow function for cylindrical shell in the quarter-infinite domain was derived using the double reflection method. The influences of the input power flow caused by the acoustic boundary characteristics were compared in terms of frequency and location.
The main objectives of the present study are to investigate the influence of acoustic boundaries of quarter space on input power flow of cylindrical shell. The input power flow analytical function in the quarter-infinite domain was derived via the double reflection method and mirror image method. With the numerical analysis, the influences of the input power flow on location and frequency were compared. The method proposed in the present study can be used to analyze the acoustic radiation problem of cylindrical shell with complex acoustic boundary conditions.
The remainder of the present article was organized as follows: The free vibration formulation of thin cylindrical shell was reviewed in the next section. Then, the vibro-acoustic function of cylindrical shell in quarter-infinite domain based on the double reflection method was discussed. The solution of cylindrical shell in quarter-infinite domain was discussed next followed by the section which establishes the input power flow of cylindrical shell in quarter-infinite domain. The penultimate section illustrates the feasibility of the proposed method and also presents the numerical results and comparison analysis of the input power flow. Finally, the conclusion was drawn.
Free vibration formulation of cylindrical shells
Model of cylindrical shells
An infinite thin-walled cylindrical shell was submerged in a fluid, with density
Figure 1. Coordinate system of the cylindrical shell.
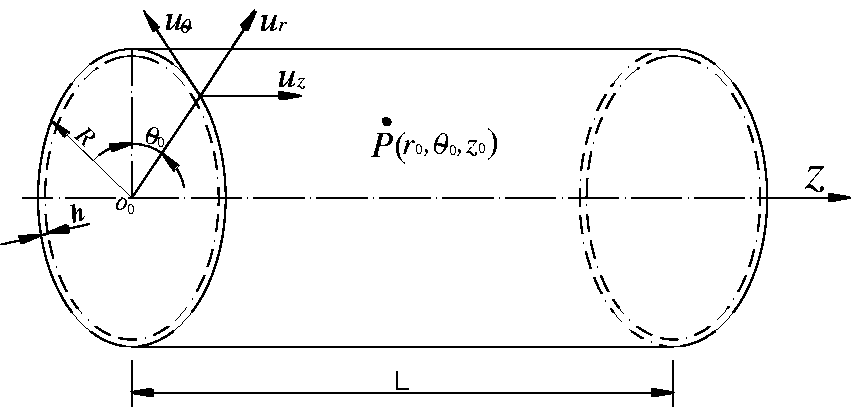
The cylindrical coordinate system (x0, θ0, r0) is established to define the position of the fluid domains and cylindrical shell. The ordinate origin of the coordinate system was located on the center of the cylindrical shell, as shown in Figure 1.
In the cylindrical coordinate system, the coordinate axis z0 was selected to coincide with the cylindrical shell centerline, whereas the coordinate axes r and θ respond to the radial and circumferential directions, respectively. u, v, and w are the orthogonal components of the cylindrical shell displacements in the axial, circumferential, and radial directions, respectively. R is the mean radius of the cylindrical shell, and h is the cylindrical shell thickness, R and h satisfy
Flügge formulations of cylindrical shells
In this research, only harmonic vibration problem of the vibro-acoustic system was considered. The Flügge cylindrical shell equations, according to Love–Kirchhoff hypotheses which neglect the effect of rotary inertia, transverse shear deformation, and transverse normal extrusion, were introduced in the vibration function. The governing motions of the infinite cylindrical shell in fluid could be described as follows

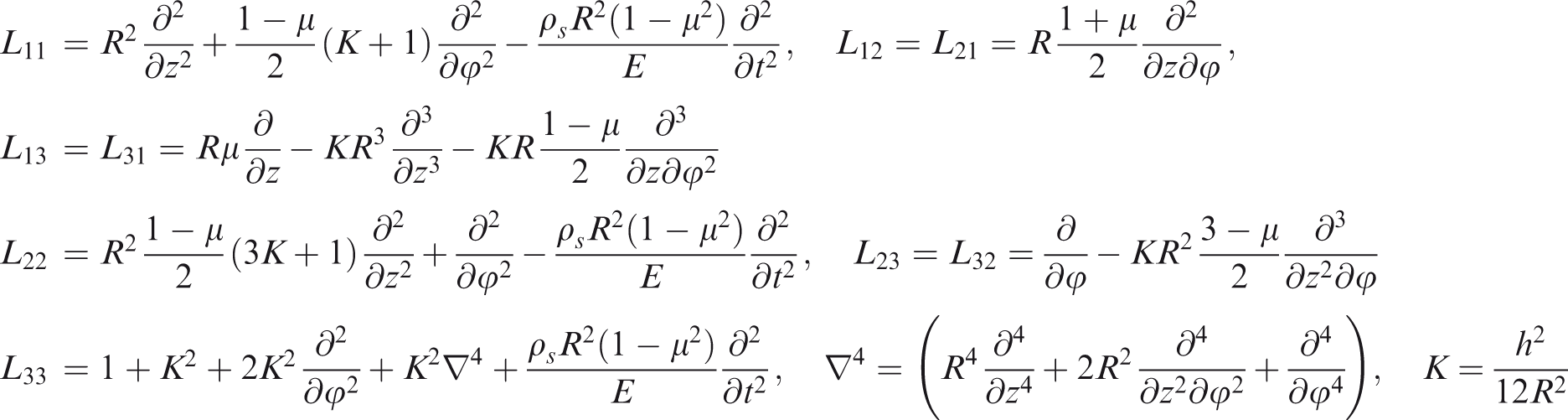
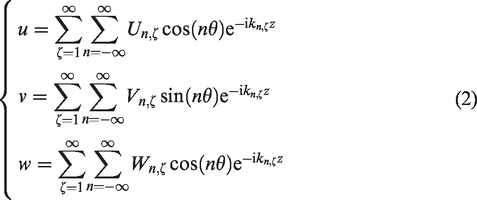
Using the wave propagation approach, the analytical solution to equation (1) takes the form of standard waves when the cylindrical shell vibrates. Considering that the vibration wave propagates along the axial direction of the cylindrical shell, the displacement components can be expanded into normal wave-forms related to its axial wave numbers
Acoustic pressure equations
In the vibro-acoustic system of cylindrical shell structure, appropriate assumptions were proposed. The acoustic medium is assumed to be an inviscid and ideally compressible fluid that cannot stand shear stress. The acoustic pressure equation is linear, and only the low–middle frequency domains of the exterior acoustic radiation were discussed in this study. Moreover, this perspective considers only the steady-state response of the vibrating structure.
The standard acoustic wave equations were reduced to the acoustic Helmholtz equation in the harmonic response problem to address the acoustic radiation problem. Given an arbitrary shape structure, the governing differential equation and acoustic boundary conditions in steady-state linear acoustics were represented by the classical 3D Helmholtz acoustic equation. According to the cylindrical coordinate system, the acoustic Helmholtz equation should be written as follows

Given the cylindrical coordinate system, applying variable separation method to solve the acoustic wave equation, the associated form of the acoustic field in free domain was expressed as follows

To ensure that the fluid remains in contact with the cylindrical shell surface, the fluid radial velocity and the shell radial velocity must be equal at the interface of the shell outer wall and the fluid medium. Thus, the boundary condition was written as follows

Substituting equation (4) into equation (5), the amplitude of acoustic pressure

According to equation (5), the radial velocity of fluid on the surface of cylindrical shell can be obtained as follows

According to equations (1) and (7), then the fluid loading imposed on the surface of the cylindrical shell was given by
Vibro-acoustic of cylindrical shell in quarter-infinite domain
The influences of acoustic boundaries must be considered to ensure the accuracy of acoustic radiation prediction if the acoustic source or field point are located in complex acoustic boundaries. The vibro-acoustic system was usually subjected to one or more boundary conditions, such as compliant boundary, rigid wall boundary, Neumann boundary, Sommerfeld radiation conditions, and so on. The vibro-acoustic characteristics of the cylindrical shell are unique due to the influence of various boundaries conditions. For example, the vibro-acoustic problem of a submarine can be defined as that containing two types of acoustic boundaries if it is located in shallow water near the dock.
Complex acoustic boundary condition
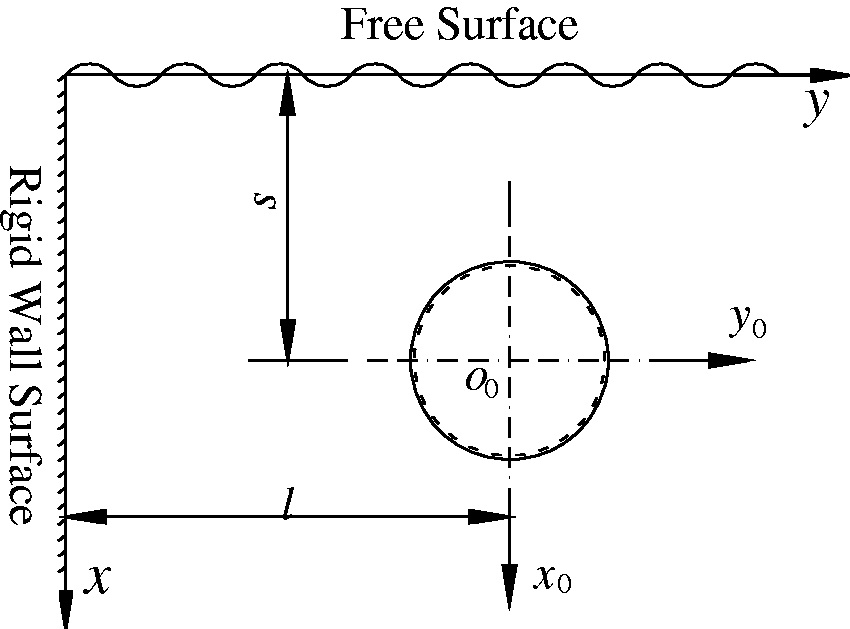
An infinite cylindrical shell submerged in the quarter-infinite acoustic domain contains two types of acoustic boundaries, namely free surface and rigid wall surface. For infinite cylindrical shell, the 3D Cartesian space domain problem is transformed into a two-dimensional (2D) plane problem, as shown in Figure 2.
Quarter space model.
A coordinate system
Double reflection method
In the quarter-infinite acoustic domain, the normal velocity on the rigid wall boundary is zero (
Double reflection method of the cylindrical shell.
Figure 3 shows the vibro-acoustic system of cylindrical shell in quarter-infinite acoustic domain. A cylindrical coordinate system (x, θ, r) was established to define the position of the fluid and structure domains, in which the ordinate origin was located in the center of the four cylindrical shells, as shown in Figure 3. The acoustic field point P was located in the fourth quadrant in the 2D plane coordinate system, which meets with
In the 2D space, the solid line circle OT is the actual cylindrical shell, the broken line ring O1 is the image cylindrical shell formed by the free surface, the broken line ring O2 is the image cylindrical shell formed by the rigid wall surface, and the broken line ring O3 is the image cylindrical shell formed by double reflection mirror. Given these three existing images, the acoustic pressure

Given the acoustic radiation function of a cylindrical shell in free space of equation (4), in the plane
Acoustic boundary condition analysis
The solution of the acoustic radiation function must satisfy the acoustic boundary conditions. According to the assumption of the acoustic boundary condition, the acoustic pressure function was discussed.
Free surface
On the free surface, the acoustic pressure is zero (

Rigid wall surface
On the rigid wall surface, the normal velocity is zero (

Double reflection boundary
The acoustic field point is located in the point O(x = 0, y = 0) which is the intersection point of free surface and rigid wall surface. In the point O, the acoustic function satisfies the boundary condition:
The acoustic radiation in interaction.
For the acoustic field point O, the vector distances and vector angle of acoustic source are


Solution of vibro-acoustic equation
Given the acoustic radiation function of a cylindrical shell in the quarter-infinite acoustic domain, the acoustic function of the actual cylindrical shell can be obtained.
Orthogonalization transformation
Equations (10) to (12) have defined the acoustic pressure equations which satisfy different boundary conditions, respectively. The point O is located both on the free surface Oy and rigid wall surface Ox. Thus, if the acoustic radiation function satisfies equations (10) and (11) in point O(x = 0, y = 0), then the acoustic boundary condition of equation (12) is also satisfied. The orthogonal transformation of equations (10) and (11) is carried out using the orthogonality of Hankel function.
(1) Orthogonal transformation of Hankel function terms


According to the mathematical transformation

Similarly, according to the mathematical transformation

(2) Orthogonal transformation of Hankel function terms
Similarly, according to the mathematical transformation
(3) According to equation (15), by introduction the bipolar cylinder coordinate theory, the parameter term
Substituting equation (18) into equation (15), then the acoustic radiation problem of acoustic source O3 is expressed by the coordinate system of the real acoustic source OT, and it can be written as follows
Acoustic pressure functions
Similar to equations (8), (9), (14), (16), and (19), the acoustic radiation function of the cylindrical shell in quarter-infinite acoustic domain can be obtained as

Acoustic radiation equation of the cylindrical shell
The input power flow problem of cylindrical shell is a near-field acoustic radiation problem. The near-field acoustic radiation function of the cylindrical shell in quarter-infinite acoustic domain is obtained as

According to the symmetry of the cylindrical shell and its mirror image distribution, the real cylindrical shell, and three cylindrical shells at any point on the rigid wall, the normal synthesis velocity is zero. Meanwhile, the synthetic sound pressure on the free liquid surface is zero. Equation (21) is the only correct solution of the acoustic vibration problem in the rectangular spatial domain described in Figure 3, which is consistent with the uniqueness of the solution of the acoustic wave equation, and equation (21) satisfies the wave equation. Further research shows that the two boundaries of the rectangular space domain are free surface and rigid wall. The corresponding analytic solution can be obtained by applying the double reflection method, which will not be described here. As shown in equation (21), the vibro-acoustic characteristic of the cylindrical shell in the quarter-infinite domain is very different from which is in the free space. The influence is caused by the acoustic boundary characteristics, the acoustic source location, and the frequency.
According to equations (8), (9), (14), (16), and (19), the far-field acoustic radiation equation of the cylindrical shell in quarter-infinite acoustic domain can also be obtained.
The radial velocity of the cylindrical shell surface can be obtained using the near-field acoustic pressure function, it can be written as follows
Input power flow of cylindrical shell
For continuous elastic structure which is excited by an external harmonic force, the magnitude of vibration depends largely on the input power flow which is imposed on the structure. The characteristics of the input power flow parameter of the elastic structure need to be studied.
Input power flow
The infinite cylindrical shell is excited by the radial harmonic external linear force, which is acting at

The input power flow of the vibro-acoustic system describes energy transfer or conversion when an external force is applied on the structure, and it can represent the influence on the structure by the external force. If the external force F and the velocity V are defined as harmonic parameters, then the force and velocity can be written as follows


Input power flow of the cylindrical shell
Substituting equations (23) and (21) into equation (25), the input power flow caused by radial linear external force per unit length of cylindrical shell in radial direction can obtained as follows


Input power flow of cylindrical shell in quarter-infinite domain
According to equation (23), the input power flow of cylindrical shell at z = 0 can be rewritten as:


Equation (28) is the input power flow function of cylindrical shell in the control domain which combination free interface and rigid wall interface at the same time, the input power flow of cylindrical shell with complex acoustic boundary properties consists of four parts. The non-dimensional input power flow function is rewritten as follows:
Numerical analysis and validation of the method
Numerical analysis was conducted to illustrate the influence of the boundary characteristic on input power flow in the quarter-infinite domain. In the numerical calculation, the influences by location and frequency on the input power flow are compared. The numerical simulation is conducted using the finite element method (FEM) to confirm the validity of the analytical solution of the proposed method.
Model description
To obtain the vibro-acoustic characteristic of the cylindrical shell in a quarter-infinite domain, the cylindrical shell was defined as an infinitely long. In the actual engineering calculation, if the cylindrical shell length
In the numerical calculation, the design parameters of the cylindrical shell are defined as follows: the diameter, length, and thickness of the cylindrical shell are D = 1 m, L = 200 m, and t = 0.001 m, respectively.
The material of the cylindrical shell is steel with the following mechanical properties: density = 7800 kg/m3, elastic modulus E = 210 GPa, and Poisson’s ratio = 0.3. The acoustic properties of the fluid (i.e. water) are isotropic and homogeneous, the density of water is 1000 kg/m3, the speed of acoustic is 1490 m/s. And the influence of hydrostatic pressure was neglected.
The assumed harmonic excitation force of the cylindrical shell at z = 0 is a unit force, and the amplitude is 1 N.
In this research, four different locations are selected for comparison, namely the distance between the cylindrical shell and three kinds of acoustic boundary conditions. The four types of source locations are (1) l = 1 m, s = 1 m; (2) l = 1 m, s = 5 m; (3) l = 5 m, s = 1 m; and (4) l = 5 m, s = 5 m.
In the structural vibro-acoustic analysis, the variation in acoustic radiation ranges from 0 to 5 in non-dimensional frequency.
Method verification
The FEM was employed to verify the analytical solution of the proposed method. Considering that the business software MSC.Patran/Nastran is a proven and widely used numerical tool for structural dynamic response analysis, the FEM predictions were calculated using MSC/Nastran 2012. In the FEM, the results of the dynamic responses of cylindrical shell are obtained through a discrete continuous structure.
In the numerical analysis using the FEM, the distance parameter of a cylindrical shell was defined as follows: l = 5 m, s = 5 m.
To ensure high numerical precision, a dense FE mesh is applied to improve the precision of the numerical calculation in input power flow analysis. The model was a fine mesh and consisted of 125,000 quadratic elements within the cylindrical structure, and the length of the unit element was modified as 0.06 m.
Figure 5 shows a comparison of the input power flow for the analytical solution of the proposed method and the FEM. In Figure 5, “PM” denotes the proposed method and “FEM” denotes the finite element method.
Figure 5 shows that the analytical solution results of the proposed method and the FEM are consistent in input power flow parameter, the difference value between the analytical solution and the FEM is very small in the high-frequency range, and it is more obvious with the increase of the calculation order. In generally, these results show that the proposed method is correct and its results are reliable and accurate.
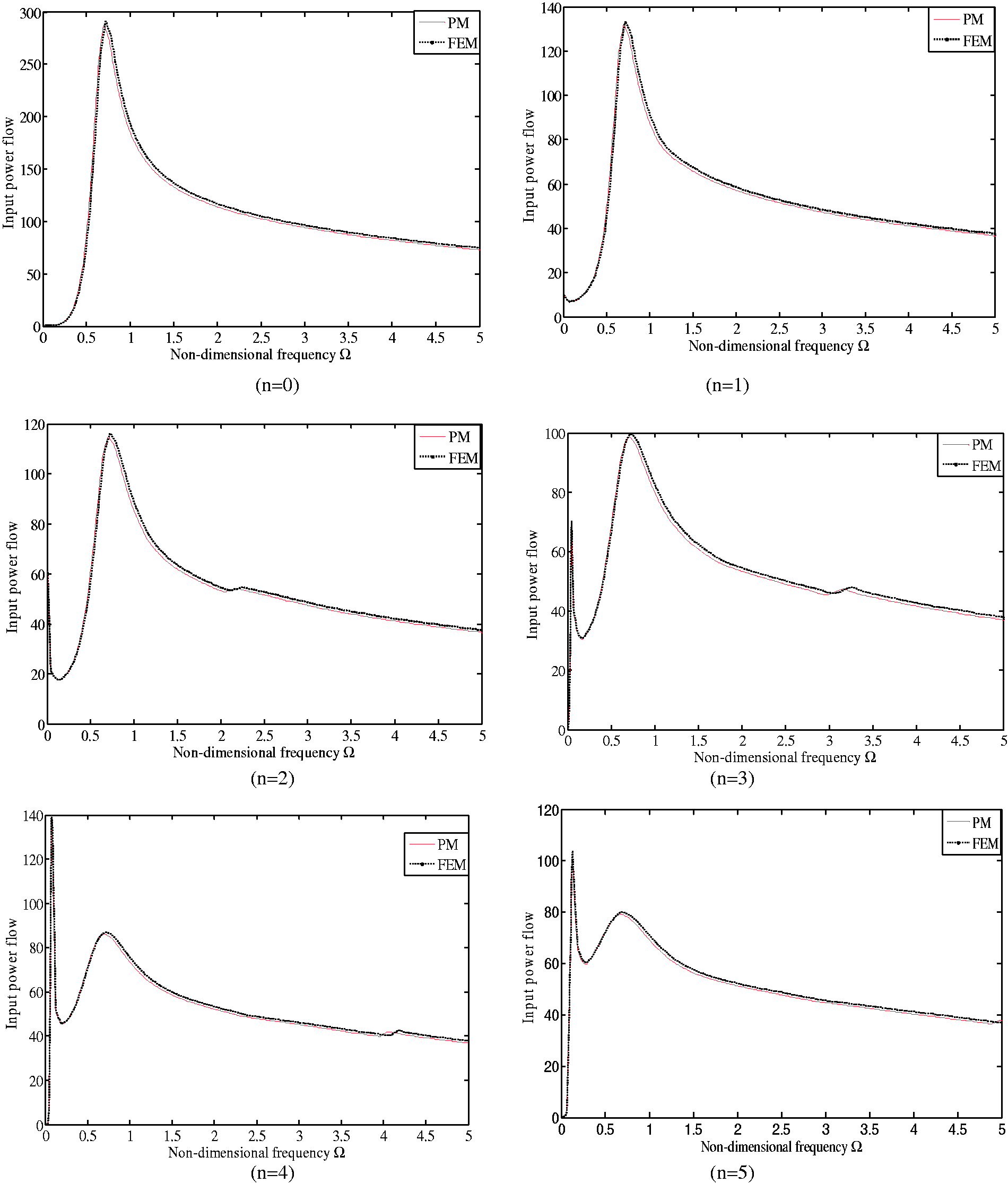
Verification of FEM and proposed method. (a) n = 0, (b) n = 1, (c) n = 2, (d) n = 3, (e) n = 4, and (f) n = 5.
Comparison of input power flow
From equation (28), the input power flow of a cylindrical shell in the quarter-infinite acoustic domain is obtained. In the numerical analysis, a truncation constant of N = 50 is employed to ensure convergence in the high-frequency range. The Bessel functions are accurately implemented in the Matlab/R2013 environment; the specialized math functions “besselh” and “besselj” are employed.
The comparisons of the influences of the boundary characteristics, frequency, and location on input power flow are shown in Figure 6(a) to (f).
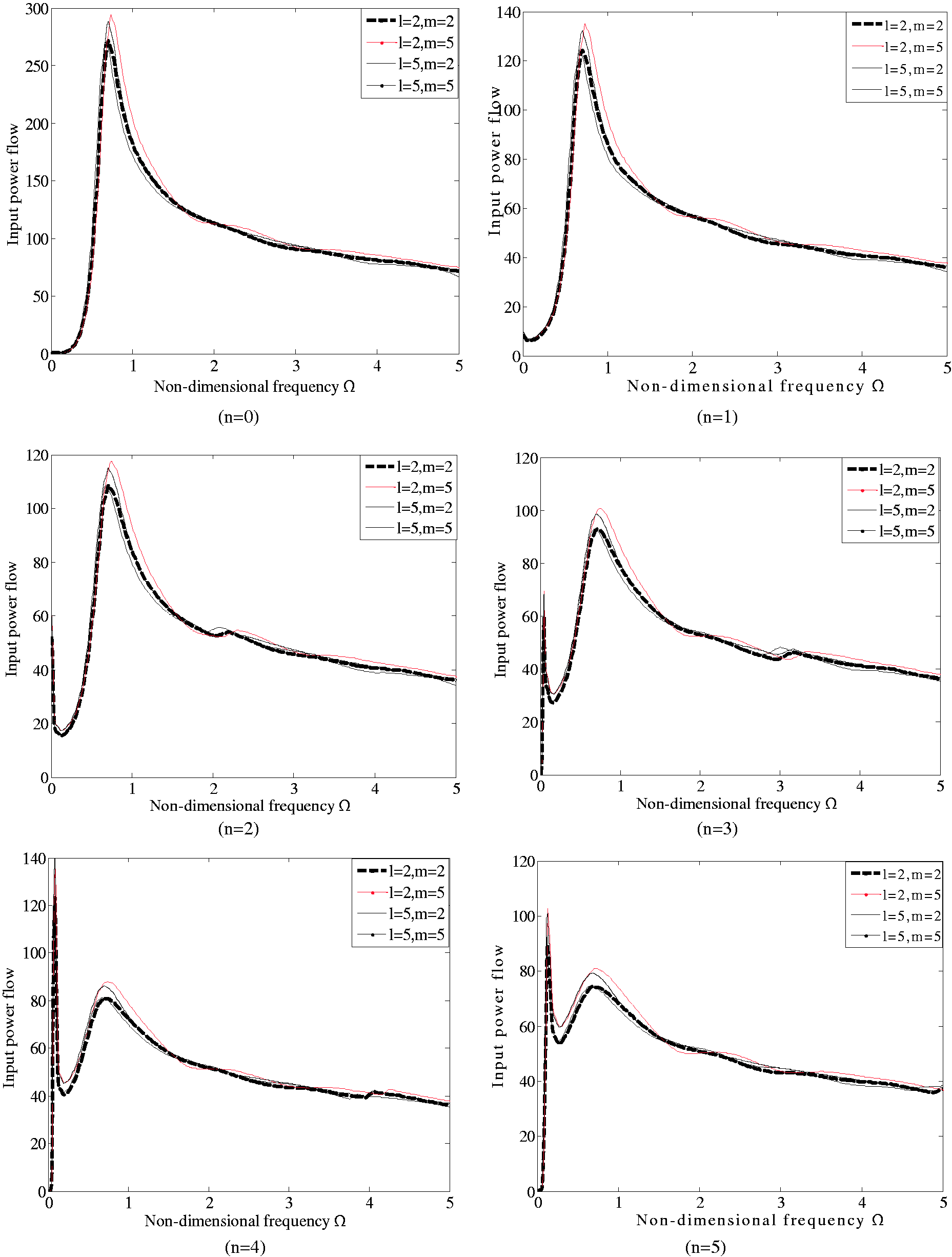
Input power flow comparison. (a) n = 0, (b) n = 1, (c) n = 2, (d) n = 3, (e) n = 4, and (f) n = 5.
As shown in Figure 6(a) to (f), comparing the frequency and location parameter effects on input power flow of the cylindrical shell which is subject to a radial harmonic external linear force, the following conclusions are drawn:
In high-frequency range (Ω>2), the distance parameter of the cylindrical shell has a slight influence on the input power flow parameter. Meanwhile, with the increase of modal order, the difference of the influence is decreased. In the low-frequency range (1.5>Ω>0.1), the existence of free surface acoustic boundary has a significant influence on the input power flow parameter, and the influence is more obvious at the peak value of the input power flow parameter. The distance between the free surface acoustic boundaries is very sensitive to reduction of the input power flow value of the cylindrical shell, and the reduction effect gradually decreases with the increase of frequency. The influence of the distance between the cylindrical shell and the free surface acoustic boundary on the input power flow is obviously greater than the distance to the rigid wall surface. The influence of the acoustic boundary is weakened with the increase of the distance between the cylindrical shell and the acoustic boundaries.
In general, the acoustic boundary characteristic has a significant influence on the input power flow, especially in the low-frequency band.
Conclusions
The expression of the input power flow function of the cylindrical shell in the control domain which combination free interface and rigid wall interface at the same time is derived from the double reflection method, stationary phase theory, and Graf’s addition theorem. Using numerical calculation, the influences of the acoustic boundary characteristic, frequency, and location in the quarter-infinite domain are also illustrated. The consistency of the results between the presented technique and the FEM shows the feasibility and effectiveness of the proposed method.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is partially supported by the Fund of State Key Laboratory of Ocean Engineering (Grant No: 1507). This support is gratefully acknowledged by the authors.