
Abstract
A vehicle-track rigid flexible coupling-dynamic model is established. The first five vertical vibration natural frequencies of system are solved. The medium wave track irregularities are taken as the excitation. The car body vertical harmonic response vibration characteristics are analyzed. It could be concluded that the second-order natural frequency is the sensitive response frequency. The car body vertical vibration simulation calculation is analyzed under vertical medium-wave track irregularity with influence factors of ballast bed, including the ballast bed vibration mass, ballast-subgrade linear and nonlinear stiffness. Through a large number of simulation analysis and Da Cheng railway test verification, it is observed that when the ballast bed thickness is between 0.35 m and 0.65 m, the amplitude of car body vertical vibration acceleration is maximum, and the stronger the bed thickness suddenly changes, the greater the acceleration of vibration increases. When the ballast bed thickness is not enough, the car body vertical vibration acceleration increases obviously. The physical correlation between two tests is established for the first time through the correctness of car body vertical acceleration data of track inspection that is verified by ground penetrating radar ballast detection.
Keywords
Introduction
The interaction of vehicle and track is an important problem related to the train safety and comfort. Many domestic and global scholars had carried on a lot of research.1,2 Ullman and O’Sullivan 3 studied the relationship between measured track irregularity and vehicle acceleration and analyzed the influence of track geometric irregularity on vehicle comfort. Fermer and Nielsen 4 established the bogie/rail interaction model to analyze the wheel-rail vertical dynamic acting forces of elastic wheel and rigid wheel. In 1990s, Zhai 5 combined the vehicle and track system as a large system, established the vehicle-track vertical unified model, and put forward the theory of vehicle-track coupling dynamics. On the basis of this theory, many scholars had carried out a lot of extended research. Ren and Sun 6 established the dynamic interaction model between vehicle and turnout. Liang and Cai 7 and Peng and Cai 8 established the vehicle-track-subgrade coupling dynamics model, which could make the fast calculation of model vibration system. Cai et al. 9 and Lei et al. 10 studied the influence of vehicle-track dynamic interaction in the transition section. Nizar and Berg 11 established a dynamic analysis model considering wheel sets and rail structure flexibility and analyzed the influence of wheel sets and rail flexibility on wheel-track force in the range of 0–150 Hz frequency. Li and Liu 12 proposed the concept of artificial short wave track irregularity and analyzed the vibration law under track random irregularity of passenger dedicated line. Xu et al. 13 studied the influence of short wave random irregularity on vibration characteristics of vehicle-track-subgrade system at high speed operation. Bezin et al. 14 established a flexible track system model integrated rigid multibody dynamics software tool to simulate the dynamic interaction between vehicle and two new types of slab ballast-less track and compared the two kinds of slab ballast-less track with traditional ballasted track. Uzzal et al. 15 established a three-dimensional vehicle-track model, in order to study the impact of wheel flats on vehicle-track coupling system. Naeimi et al. 16 used a three-dimensional model of vehicle track coupling to make numerical simulation in time domain and study the influence of track irregularity on dynamic characteristics. Grossoni et al. 17 studied the dynamic characteristics of rail joint by using two-dimensional vehicle-track coupling dynamics model and analyzed the main parameters of vehicle and track: P1 force and P2 force. Ricci et al. 18 established a discrete/continuum double-layer model to study the dynamic behavior of the ballast under a train load. Taking nonlinear constitutive behavior of the ballast into account, Varandas et al. 19 presented a methodology to calculate the settlement of the track due to moving loading. Shenton 20 studied on the permanent deformation of ballast by a triaxial test under different loading conditions and presented a rapid method to predict the deformation of ballast with different loading conditions. By introducing the shear stiffness and shear damping of the ballast, Zhai et al. 21 established a five-parameter model to analyze the granular ballast vibration. Although the predecessors have done a lot of fruitful research on the vehicle-track dynamic characteristics, there are few researches on the influence factors of ballast bed on car body vertical vibration. Furthermore, the change of ballast bed density, thickness, and other factors will change ballast bed vibration mass and stiffness, generally affect the vertical vibration in vehicle-track system under vertical medium wave track irregularity. This article studies the vertical vibration characteristics of car body under vertical medium-wave irregularity with influence factors of ballast bed on the normal speed.
Simulink rigid flexible coupling-dynamic model and inherent characteristic calculation
The vehicle moves along the x direction with speed v, and z axis of the coordinate system is vertical to the track.
M1—1/2 car body mass; M2—single unit bogie mass; M3, M6—single unit wheel set mass; M4, M7—a half sleeper mass; M5, M8—ballast bed mass of vibration; K1—secondary suspension stiffness; K2, K6—primary suspension stiffness; K3, K7—wheel-track vertical contact stiffness; K4, K8—fastener stiffness; K5, K9—ballast-subgrade stiffness; C1—secondary suspension damping; C2, C6—primary suspension damping; C4, C8—fastener damping; C5, C9—ballast-subgrade damping; L—length; b—half the wheelbase; Ls—half of bogie spacing;
In this article, the vehicle-track rigid flexible coupling-dynamic model is established as a system composed of bogie, wheel set, sleeper, and ballast. The car body is assumed to be an elastic homogeneous cross-section Euler beam. 22 Bogies and wheel sets are regarded as rigid bodies. The four-wheel sets displacement is the track irregularity input. The vertical vibration, shown in Figure 1, can be figured out by the vehicle-track model.
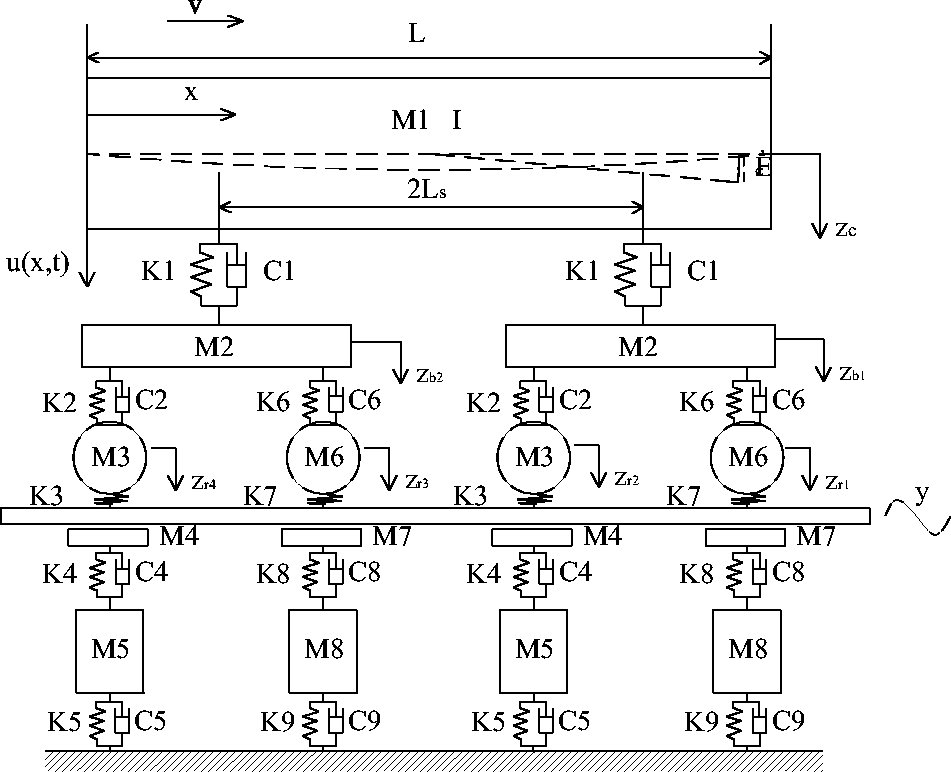
The vertical vibration model of vehicle-track.
The car body elastic vibration is taken into account, when the dynamics equation of system is established. The beam elastic vibration theory is used and the influence of damping is considered, the partial differential equation of the car body vibration can be established.


In equations (1) and (2),
The modal superposition method is used to calculate the car body elastic vibration equation. The i order normal vibration modes and regular coordinates of car body are defined as

Substituting equation (3) into equation (1), equation (4) is obtained through integral along the length of car body, the orthogonality of modal, and the property of function

The car body is connected to the bogie through secondary suspension. The stiffness and damping of secondary suspension are small. The car body can be regarded as a free Euler beam at both ends. The mode shape function is

Differential equations of car body rigid body motion


Then, the dynamics differential equation of system is established.
23

The natural frequency of system is undamped free vibration frequency. Let

According to the linear time-invariant ordinary differential equation’s theory, the solution of equation (9) can be solved:

Substituting equation (10) into equation (9)

The test vehicle is WX25T ballast-subgrade inspection vehicle of China Railway Corporation. The axle load is 17t, and other vehicle parameters are obtained according to its design technical index. In the test line parameters, the fastener stiffness is measured, and the ballast-subgrade stiffness is derived from elastic modulus. The basic parameters of vehicle and track are presented in Table 1.
The basic parameters of vehicle and track.
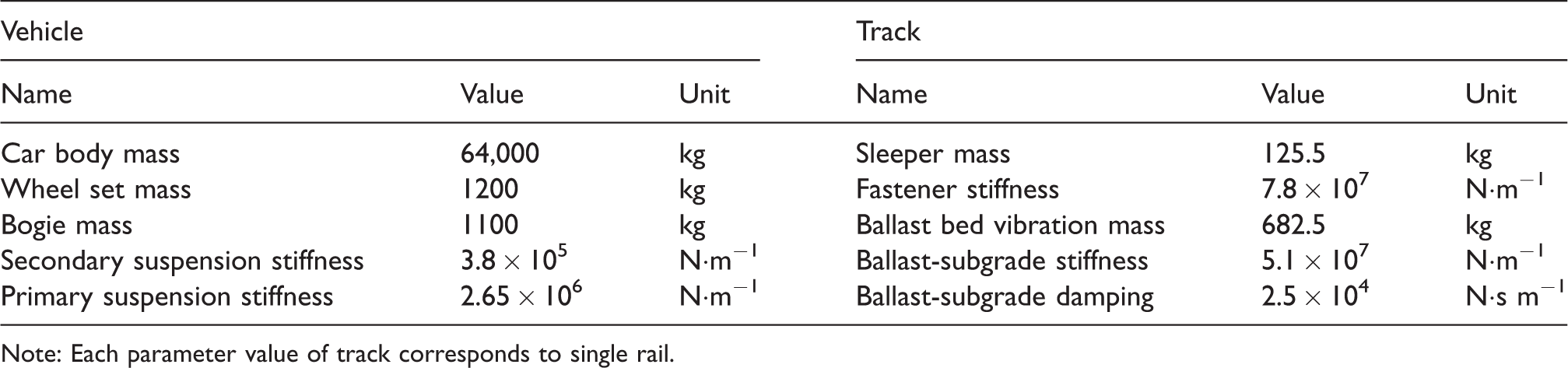
Note: Each parameter value of track corresponds to single rail.
The wheel-track vertical contact stiffness is the most important parameter for the interaction between vehicle system and track system; it needs to be solved by calculation 24 and then substituted in equation (9).
The vehicle load acts on the track through wheel set, resulting in the vertical distance between the center of wheel and rail varies with vertical force. It can be assumed that a spring connects with the wheel center and track center.
25
Thus, the complex wheel-track relationship is transformed into simple spring relationship. Then the wheel-track vertical contact stiffness can be calculated as follows

The influence of lateral sliding trend is not considered to the contact area. In addition, it takes a lot of time to calculate the wheel-track stiffness by using wheel-track dynamic contact, and Hertz nonlinear theory is suitable for the problem of wheel-track vertical contact. The wheel-track contact stiffness calculation method based on Hertz nonlinear theory is


P(s) is the gravity load and Ks is the static stiffness of wheel-track. Considering conical tread

The vehicle and track parameters are substituted into the dynamics differential equation and the first five-order natural frequencies of the vertical vibration in vehicle-track system are obtained. The results are presented in Table 2.
Vertical vibration natural frequencies of vehicle-track system.

Furthermore, the Simulink module of MATLAB toolbox is used for modeling and simulation based on dynamics equation of the system.
The transfer function of linear system can be obtained by Laplace transform in Simulink module, which is helpful to solve the response characteristics in frequency domain. Bode diagram obtained by Simulink module is another useful form to show the system natural frequencies, and the results are presented in Figure 2. For instance, Barbosa, an expert in dynamics, developed a spectral method to deal with the linear vehicle vibration response under irregularity excitation. 26
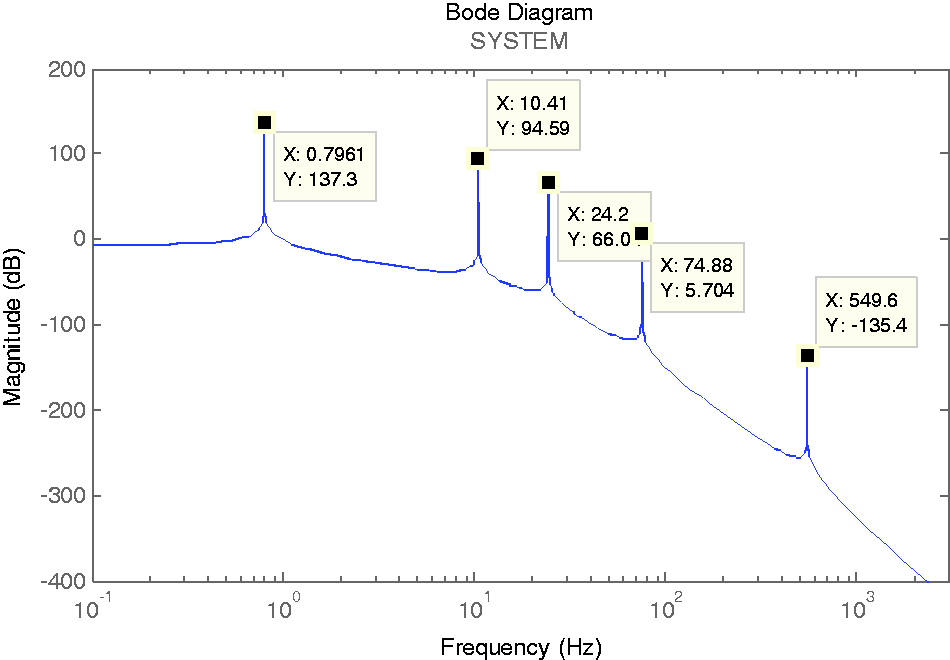
System bode diagram.
However, most of the vibration systems are nonlinear. For example, the stiffness of vehicle-track system is nonlinear, which is mainly reflected in the suspension system and ballast bed ignoring wheel-track high frequency vibration characteristics. The stiffness of suspension system has the weak nonlinearity, while the nonlinearity of ballast-subgrade stiffness is stronger. The nonlinearity of ballast-subgrade stiffness is influenced by the change of ballast bed density, the thickness, and other factors. These factors are easy to lead to the dynamics nonlinear characteristics of system.
In the past 15 years, the theoretical analysis of nonlinear vibration had been developed rapidly. There are many analytical approaches to nonlinear vibration, such as variational iteration method (VIM). Jihuan He is expert in VIM, he
27
applied the variational iteration methodology to a wide variety of nonlinear equations, and the forced oscillation of Duffing equation was studied by a VIM.
28
Then, he featured a survey of some recent developments in asymptotic techniques,
29
which are valid not only for weakly nonlinear equations but also for strongly ones. Torabi et al.
30
considered shear deformation and rotatory inertia, transverse vibration of nonlinear Timoshenko beam carrying a concentrated mass oscillating with large amplitude was investigated using VIM. In this article, Duffing oscillator is introduced to obtain the equations of system with cubic nonlinear elastic forces

Car body vertical harmonic response vibration analysis
Track irregularity is the direct vibration excitation source of vehicle track system, which is used to simulate the actual condition. The accuracy of Simulink model is 1 × 10−6.
At present, the vertical displacement excitation of harmonic wave is usually equivalent to the track irregularity in relevant test. The vertical track irregularity can be described as trigonometric functions

Velocity on normal speed railway is 80–160 km·h−1, wave length range of vertical medium wave irregularity is 1–30 m, and corresponding frequencies are from 0.7 Hz to 44.4 Hz.
The amplitude of track irregularity waveform is set to 6 mm, and the vertical vibration amplitude characteristics of car body are analyzed with different excited frequencies.
According to Table 3, under the same excitation amplitude, except for the first three vertical vibration natural frequencies, the car body vertical vibration acceleration increases with the excited frequency, increases generally when the excited frequency is less than the second-order natural frequency and decreases when the excited frequency exceeds the second-order natural frequency, and tends to be stable when the excited frequency exceeds the third-order natural frequency.
Vibration acceleration amplitude stimulation results of car body with excited frequency.

Vibration acceleration amplitude test results of car body with excited frequency.

In order to verify the accuracy of dynamic model simulation results, WX25T ballast-subgrade inspection vehicle of China Railway Corporation was transferred into the wheel rail relationship Laboratory of China Academy of Railway Sciences, the vertical equivalent excitation displacement was applied to wheel set, and car body vertical vibration acceleration was measured, shown in Table 4. It is presented that the difference of amplitude between measured results and simulation results is about 10%. According to Figure 3, two results have the same distribution trend.
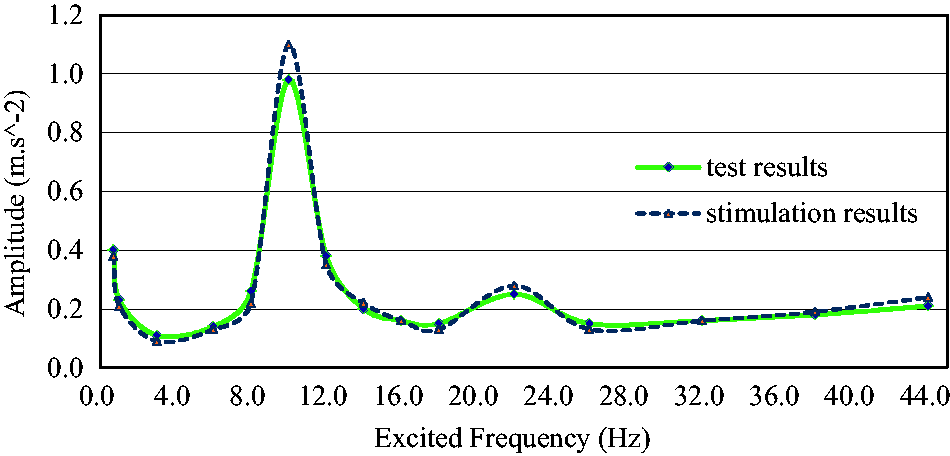
Vibration excited frequency acceleration amplitude distribution trend of car body.
The second-order natural frequency is the most sensitive frequency, under the same amplitude, car body vertical vibration acceleration is the maximum when 10.33 Hz is taken as the excited frequency. The acceleration amplitude decreases significantly once the excited frequency deviates from 10.33 Hz. In the case of irregularity wavelength obtained by known or track inspection, the corresponding resonance speed for a long time in the course of driving should be avoided.
The car body vertical vibration simulation analysis under vertical medium-wave track irregularity with influence factors of ballast bed
The analysis condition of track irregularity is obtained from Da Cheng railway in China, the representative wavelength range is 2–10 m, the amplitude range is 1–6 mm, and detection speed is 160 km·h−1. The vertical irregularity sampling data are taken from the constant speed test of track inspection car to Da Cheng railway, the sampling interval is 0.25 m, and the sampling point per kilometer is 4001 points. In order to meet the requirement of the spectrum analysis, the sample length is set to 1800 m. Through the annual inspection of ballast-subgrade, a section of standard design bed thickness is selected which is dense, smooth without defects. It is beneficial to the comparison between simulation calculation and measured data.
The vibration characteristics of car body obtained by simulation are presented in Figure 4.
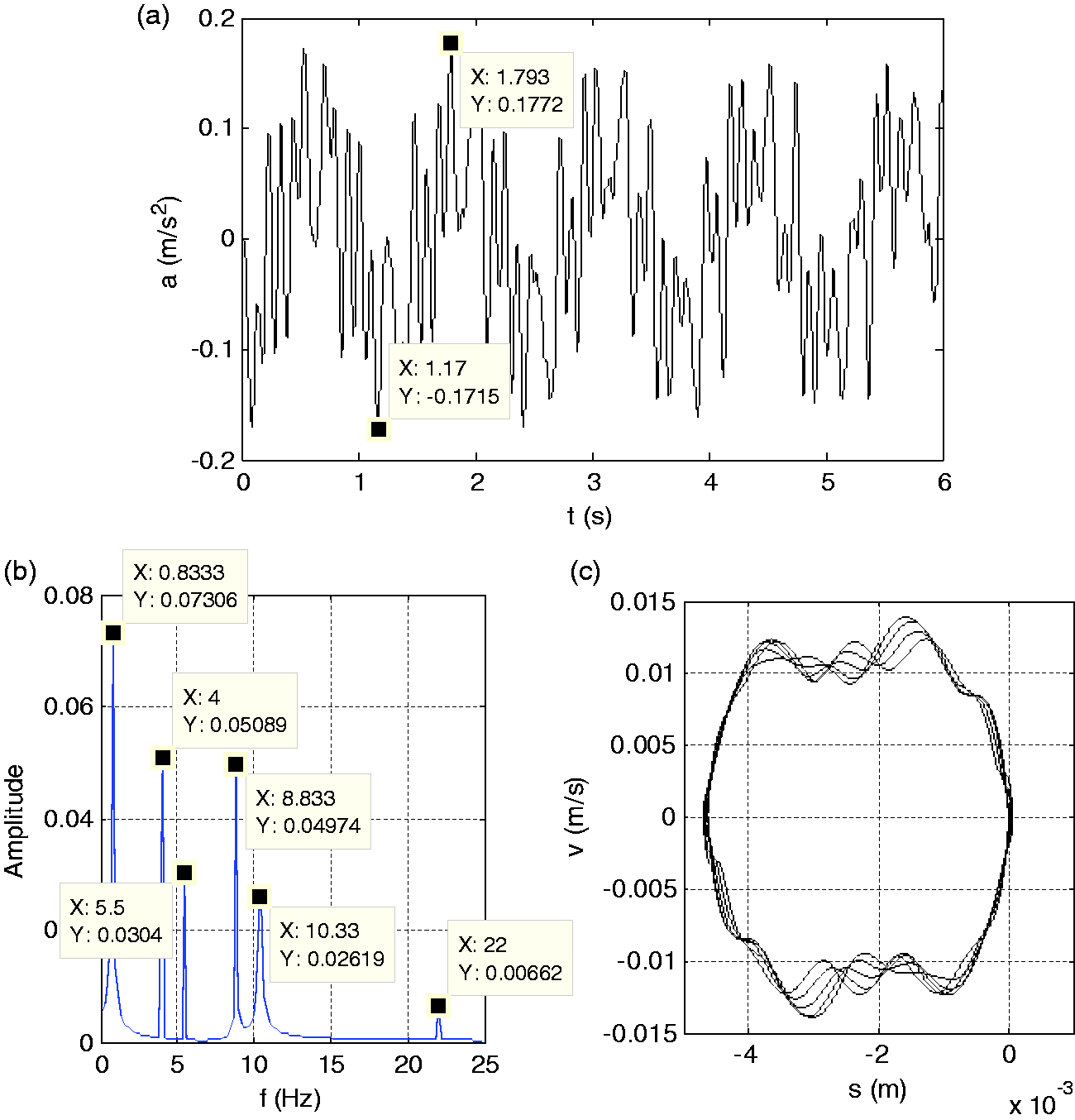
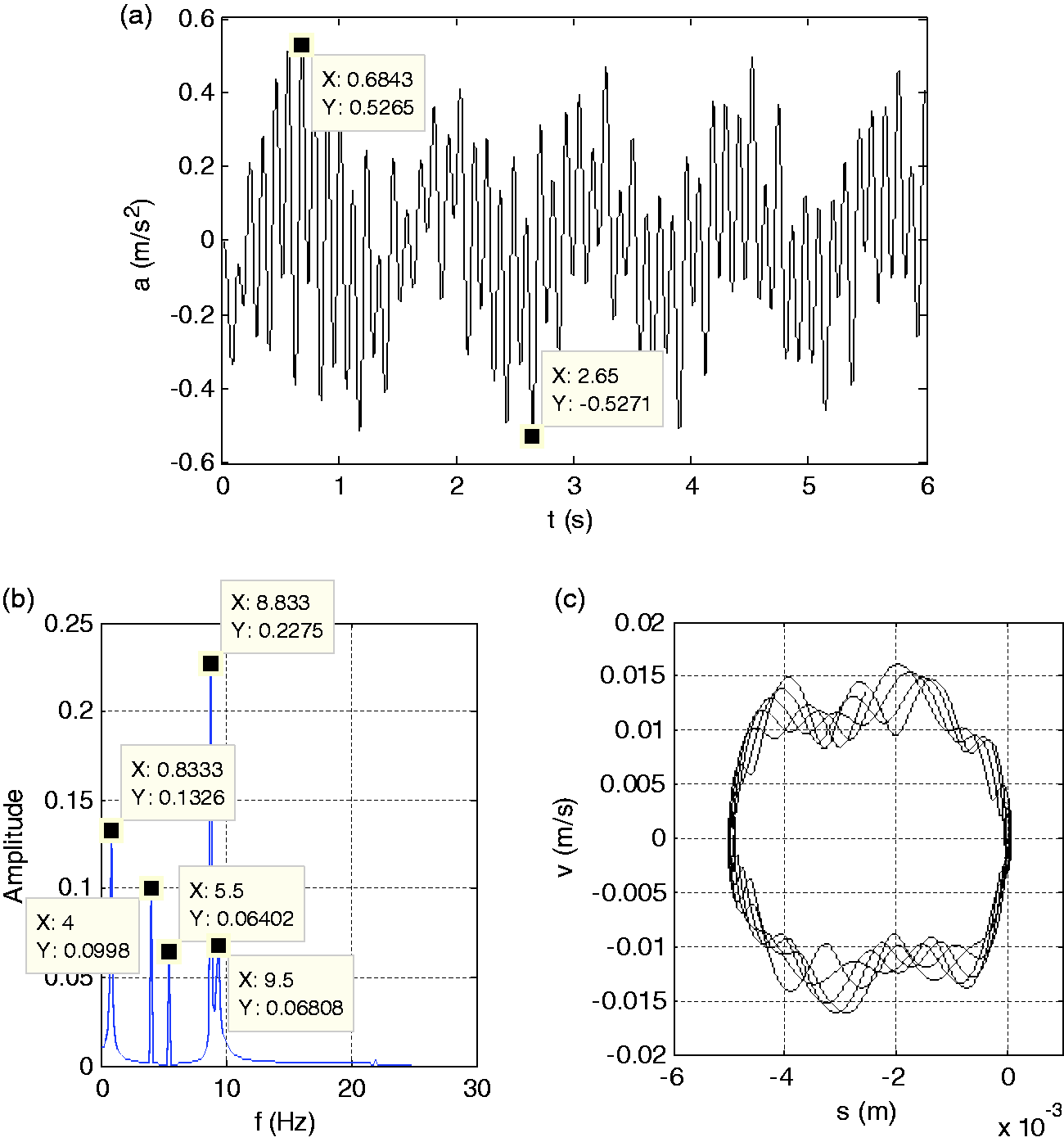
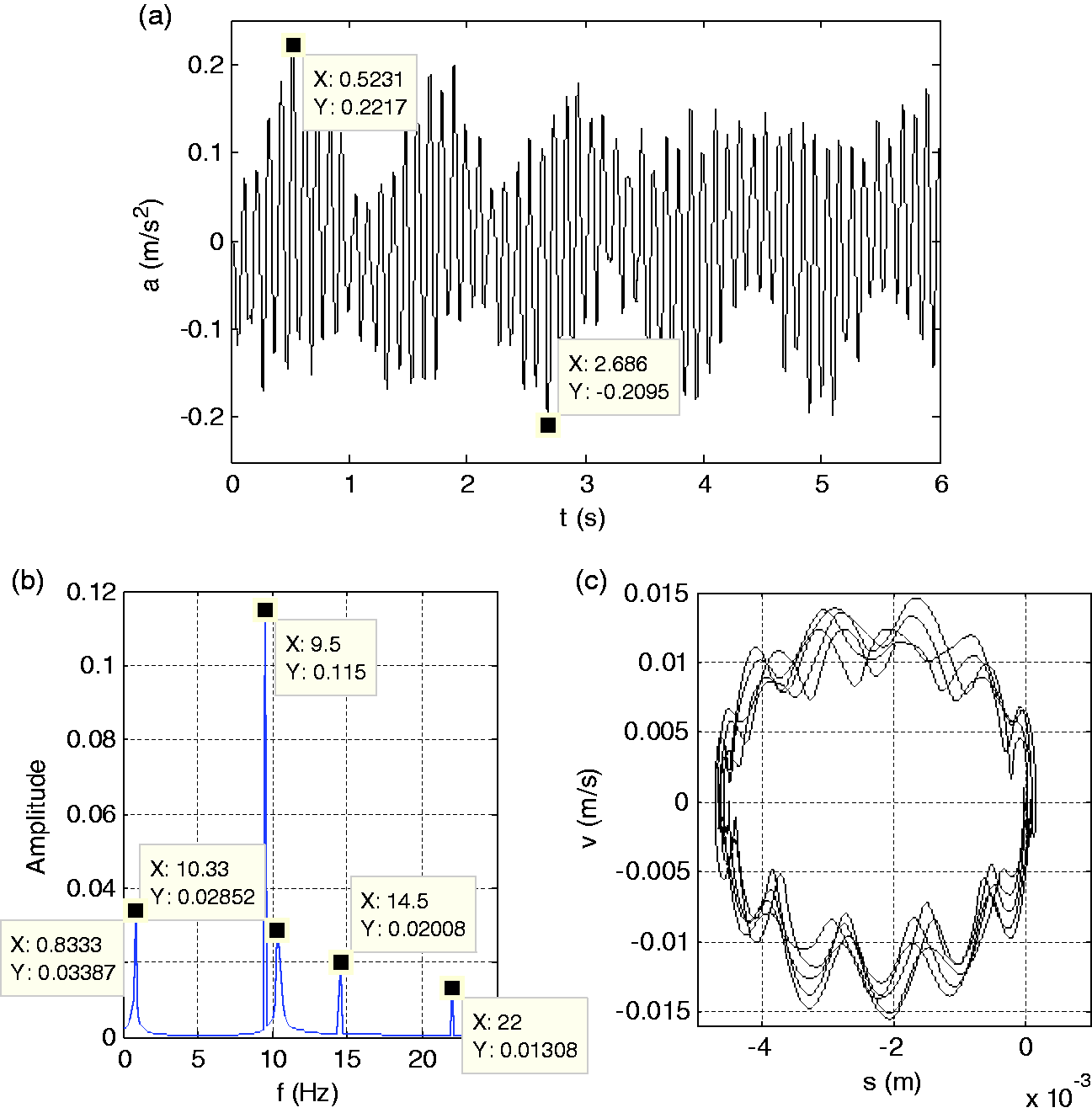
Vertical vibration simulation response of car body. (a) Vertical vibration acceleration curve. (b) Vertical vibration spectrum. (c) Vibration phase diagram.
From Figure 4, it is noted that the car body vertical peak acceleration is 0.18 m·s−2, the advantage frequencies are 0.83 Hz, 4 Hz, 5.5 Hz, 8.83 Hz, 10.33 Hz, and 22 Hz, and system is stable from the phase diagram. It can be observed from the figure that there are two advantage frequencies, 0.83 Hz and 10.33 Hz, in the vertical vibration acceleration spectrum, which correspond to the first two system natural frequencies.
The vibration characteristics of car body obtained by test are presented in Figure 5.
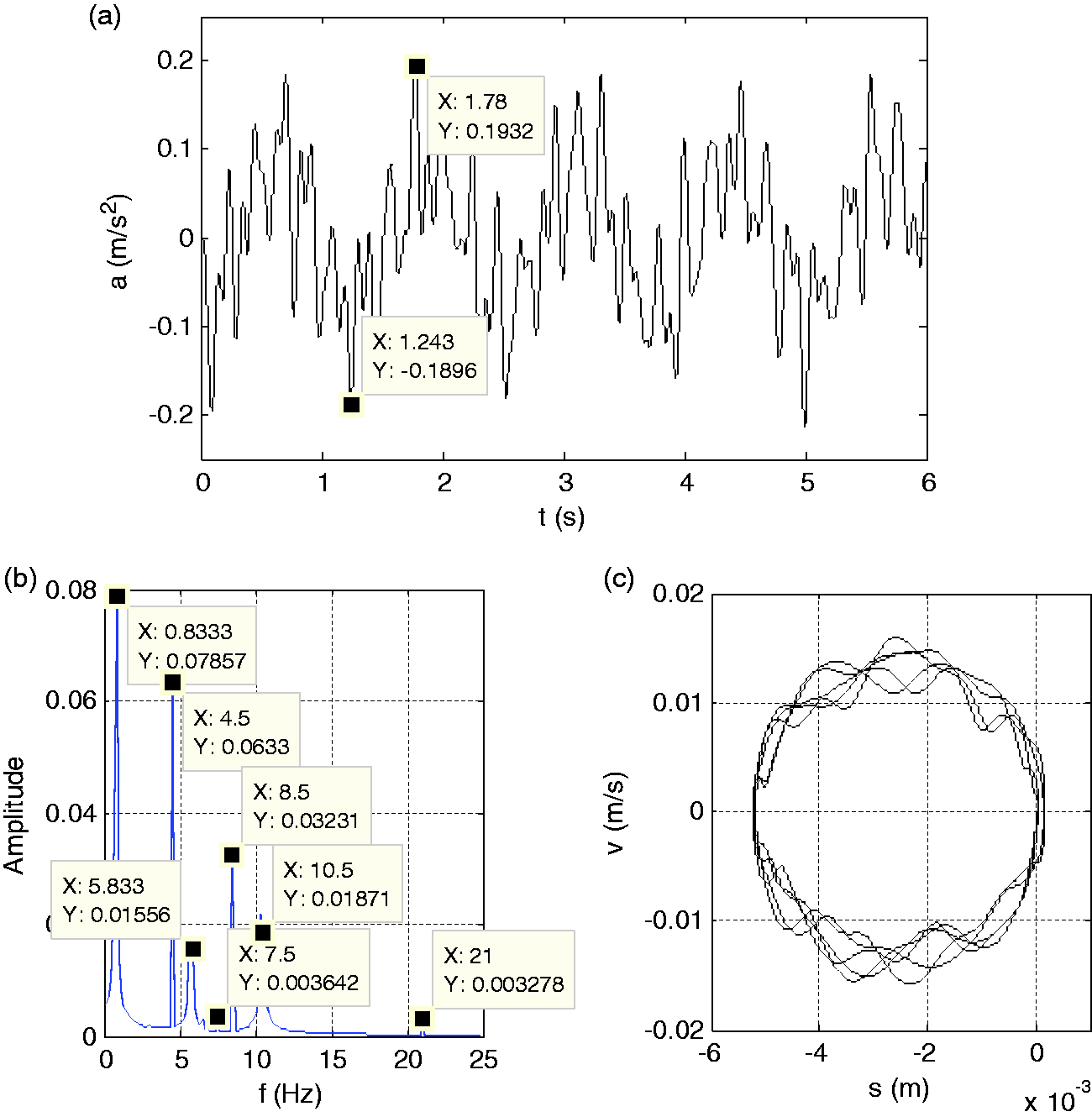
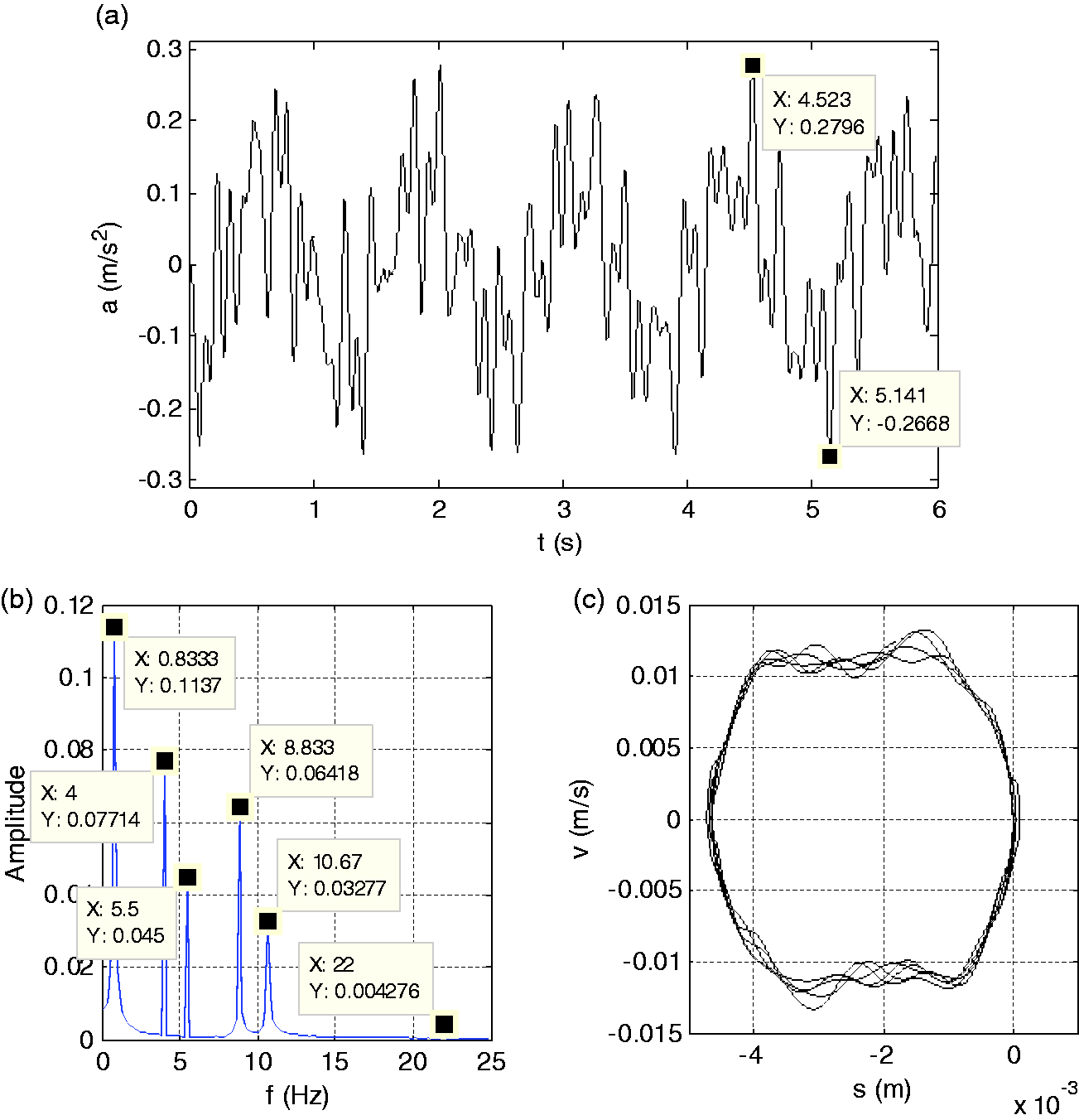
Vertical vibration test response of car body. (a) Vertical vibration acceleration curve. (b) Vertical vibration spectrum. (c) Vibration phase diagram.
From Figure 5, it is noted that the car body vertical peak acceleration is 0.19 m·s−2, the advantage frequencies are 0.83 Hz, 4.5 Hz, 5.83 Hz, 8.5 Hz, 10.5 Hz, and 21 Hz, and system is basically stable from the phase diagram. It can be observed from the figure that there are two advantage frequencies, 0.83 Hz and 10.33 Hz, in the vertical vibration acceleration spectrum, which correspond to the first two system natural frequencies. The difference of peak vibration acceleration between measured results and simulation results is about 8.3%, and the spectrum characteristics are basically the same.
However, when vertical medium wave track irregularity appeared, the change of ballast bed mechanical properties will directly affect the vehicle-track system. In the vehicle-track dynamics system, the variation is mainly reflected on the ballast bed vibration mass, the ballast-subgrade linear and nonlinear stiffness.
When the thickness of ballast bed decreases, the vibration mass becomes smaller and the stiffness becomes larger; on the contrary, the vibration mass becomes larger and the stiffness becomes smaller. Da Cheng railway ballast design thickness is 0.25 m, and the influence of ballast bed thickness on stiffness is not linear. After the experiment testing by China Academy of Railway Sciences, it is presented that ballast-subgrade stiffness decreased significantly when the ballast bed thickness is between 0 and 0.4 m, and the stiffness reduction rate slowed down obviously after 0.5 m. The ballast bed density and ballast fouling degree have great influence on the elastic modulus and then affect the ballast-subgrade stiffness. When the density is insufficient, the ballast-subgrade stiffness decreases and the nonlinear stiffness increases.
The effect of ballast bed vibration mass
The standard vibration mass is 682.5 kg. Vibration mass 300 kg, 600 kg, 900 kg, 1200 kg, and 1500 kg are taken for analysis.
From Figures 6 and 7, it is noted that when the ballast bed vibration mass increased, the vertical vibration acceleration value changed slightly, the amplitude of variation is not more than 10%, and the stability of system is less affected.
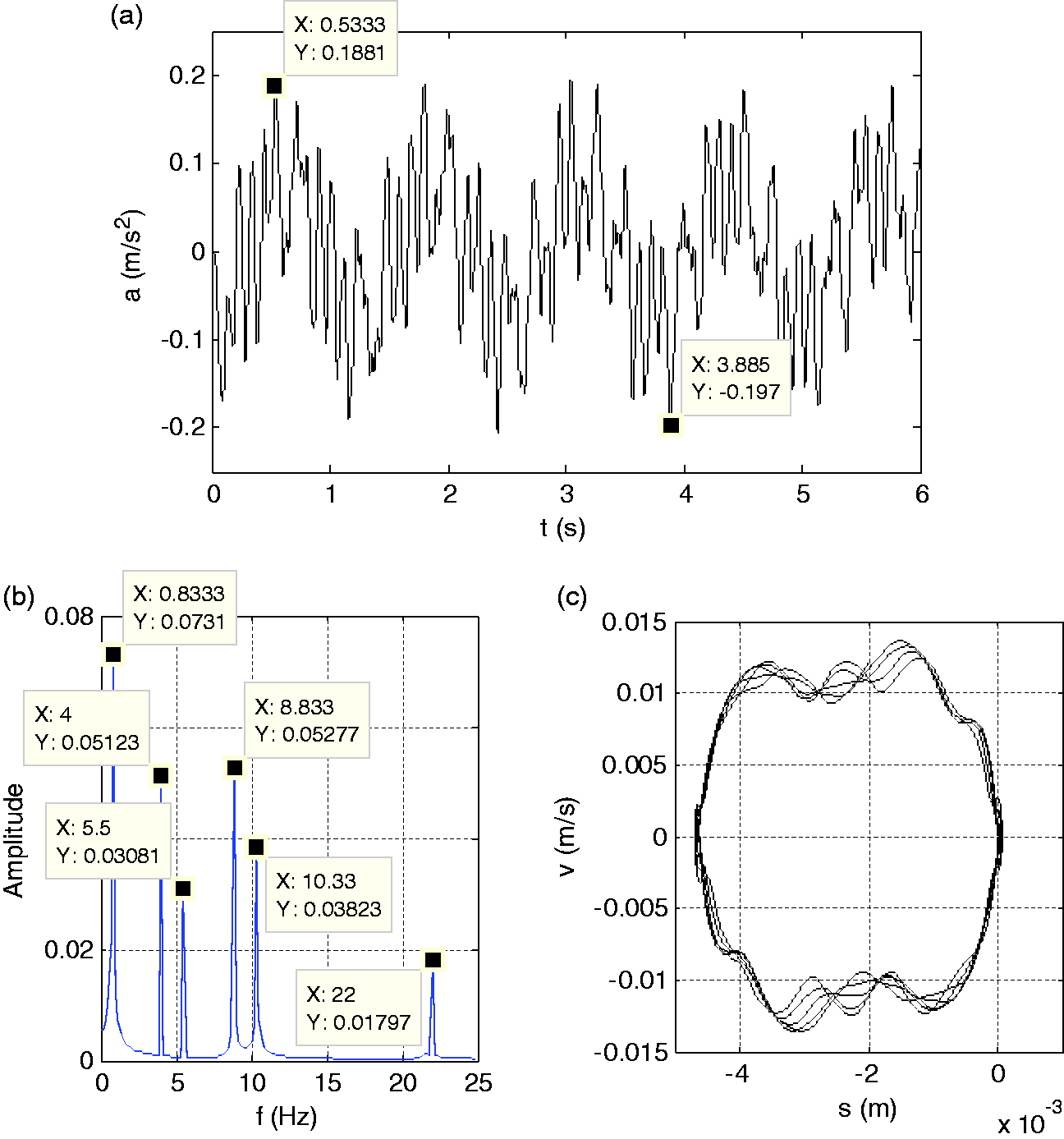
Simulation response of car body with ballast bed vibration mass 1500 kg. (a) Vertical vibration acceleration curve. (b) Vertical vibration spectrum. (c) Vibration phase diagram.
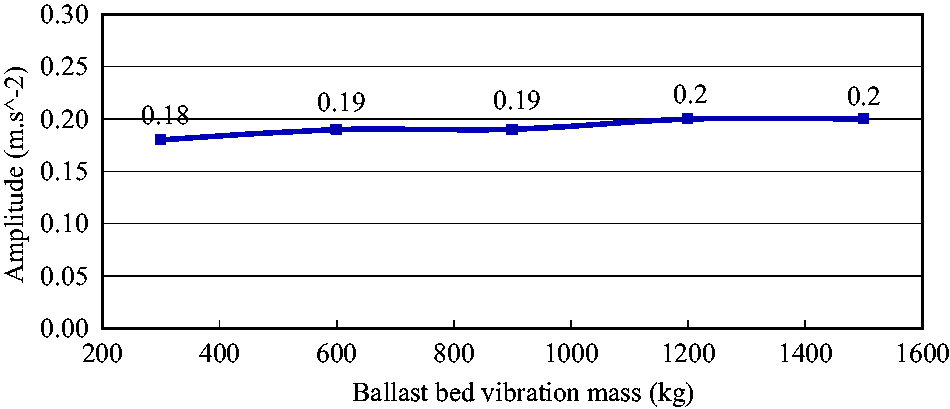
Vibration peak acceleration simulation distribution trend of car body with different ballast bed vibration mass.
The effect of ballast-subgrade linear stiffness
The ballast-subgrade stiffness is 5.1 × 107 N·m−1, when the ballast bed thickness is about 0.25 m in Da Cheng railway. The thickness of 0.1 m to 1 m is analyzed, and the corresponding stiffness is 8.5 × 107 N·m−1 to 2.0 × 107 N·m−1 after testing. Linear stiffness 2.0 × 107, 2.3 × 107, 2.6 × 107, 2.9 × 107, 3.2 × 107, 3.5 × 107, 3.8 × 107, 4.1 × 107, 4.4 × 107, 4.7 × 107, 5.0 × 107, 5.3 × 107, 5.6 × 107, 6.0 × 107, 7.0 × 107, and 8.0 × 107 N·m−1 are taken for analysis.
From Table 5 and Figures 8 and 9, it is noted that
Simulation response of car body with linear stiffness 3.2 × 107 N·m−1. (a) Vertical vibration acceleration curve. (b) Vertical vibration spectrum. (c) Vibration phase diagram.
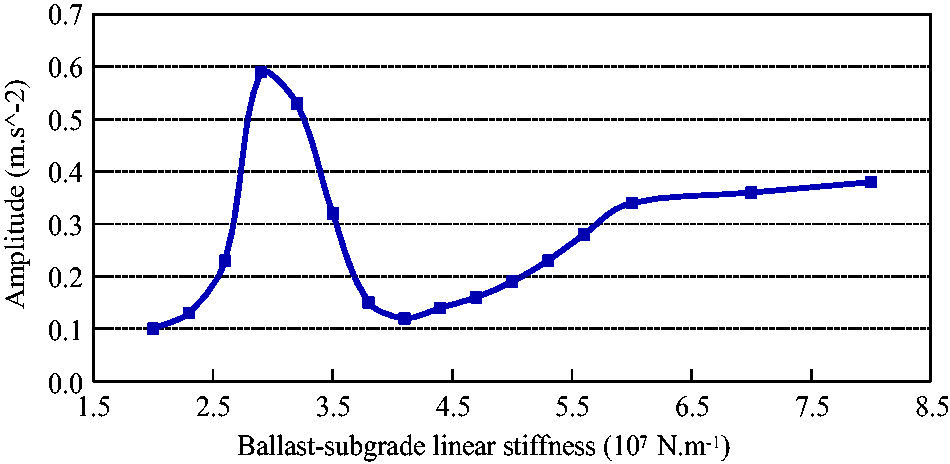
Vibration peak acceleration simulation distribution trend of car body with different ballast-subgrade linear stiffness.
Simulation response of car body with nonlinear stiffness 1 × 1011 N·m−3. (a) Vertical vibration acceleration curve. (b) Vertical vibration spectrum. (c) Vibration phase diagram.
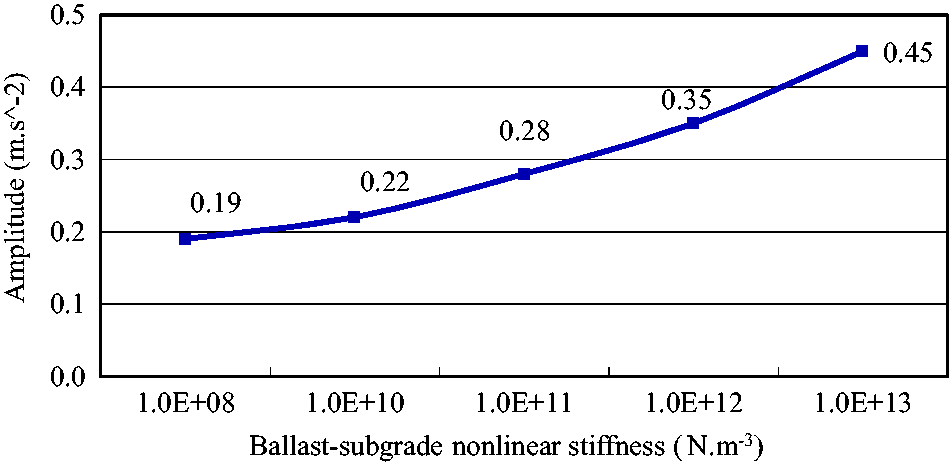
Vibration peak acceleration simulation distribution trend of car body with different ballast-subgrade nonlinear stiffness.
Vibration peak acceleration simulation results of car body with different ballast-subgrade linear stiffness.

Starting from the standard stiffness of 5.1 × 107 N·m−1, when the stiffness is decreased, the second-order natural frequency of car body vertical vibration 10.33 Hz shifts left as the response frequency and the car body vertical vibration acceleration decreases. However, when the stiffness reaches to 3.8 × 107 N·m−1, the vertical acceleration begins to increase, the response frequency converge to the irregularity wave 8.8 Hz frequency, prompted the corresponding amplitude of response frequency 8.8 Hz to increase evidently, and the stability of system is decreased.
When the stiffness is 3.0 × 107 N·m−1, the maximum acceleration value is reached at 0.6 m·s−2 in the analysis stiffness range. When the stiffness continues to decline, the vertical vibration acceleration of the car body is significantly decreased until the stiffness close to 2.6 × 107 N·m−1, then the acceleration decreases slowly, gradually becomes stable. The stable value is 0.1 m·s−2.
When the stiffness increases, the vertical acceleration increases, and the acceleration growth slows down when the stiffness is greater than 6.0 × 107 N·m−1, gradually becomes stable. The stable value is 0.38 m·s−2.
The maximum acceleration is six times the minimum acceleration.
The effect of ballast-subgrade nonlinear stiffness
Nonlinear stiffness K′ 1 × 108, 1 × 1010, 1 × 1011, 1 × 1012 and 1 × 1013 N·m−3 is taken for analysis.
It can be obtained:
From Figures 10 and 11, the vertical acceleration of car body increases obviously with the increase of nonlinear stiffness. From the spectrum, the second advantage frequency 10.33 Hz offsets positively with the increase of nonlinear stiffness. From the phase diagram, the stability of the vehicle system phase diagram is basically unaffected. In the analysis area, the maximum acceleration is 2.37 times the minimum.
The railway line test and numerical analysis
Through the analysis, it is obtained the relationship between car body vertical vibration acceleration under medium-wave vertical track irregularity and ballast bed mechanical characteristics. At present, the mainstream detection method is ground penetrating radar (GPR) detection by launching electromagnetic wave that can detect the ballast bed density and thickness; and track geometric detection can be used to detect the track irregularity and car body vibration acceleration. To verify the correlation, the wheel-track system test and ballast GPR detection were carried out on Da Cheng (up line) railway in China. According to the data analysis obtained from line test, the accuracy of calculation results is verified.
In this section, the measured track irregularity is used as the excitation of dynamics simulation system. In the simulation calculation, the ballast bed parameters are all standard values.
Da Cheng railway (up line) K131 + 880—K131 + 620
Detection speed is 157 km·h−1. The car body vertical vibration characteristics of simulation calculation are presented in Figure 12, the vibration test results are presented in Figure 13, and the GPR detection result is presented in Figure 14.
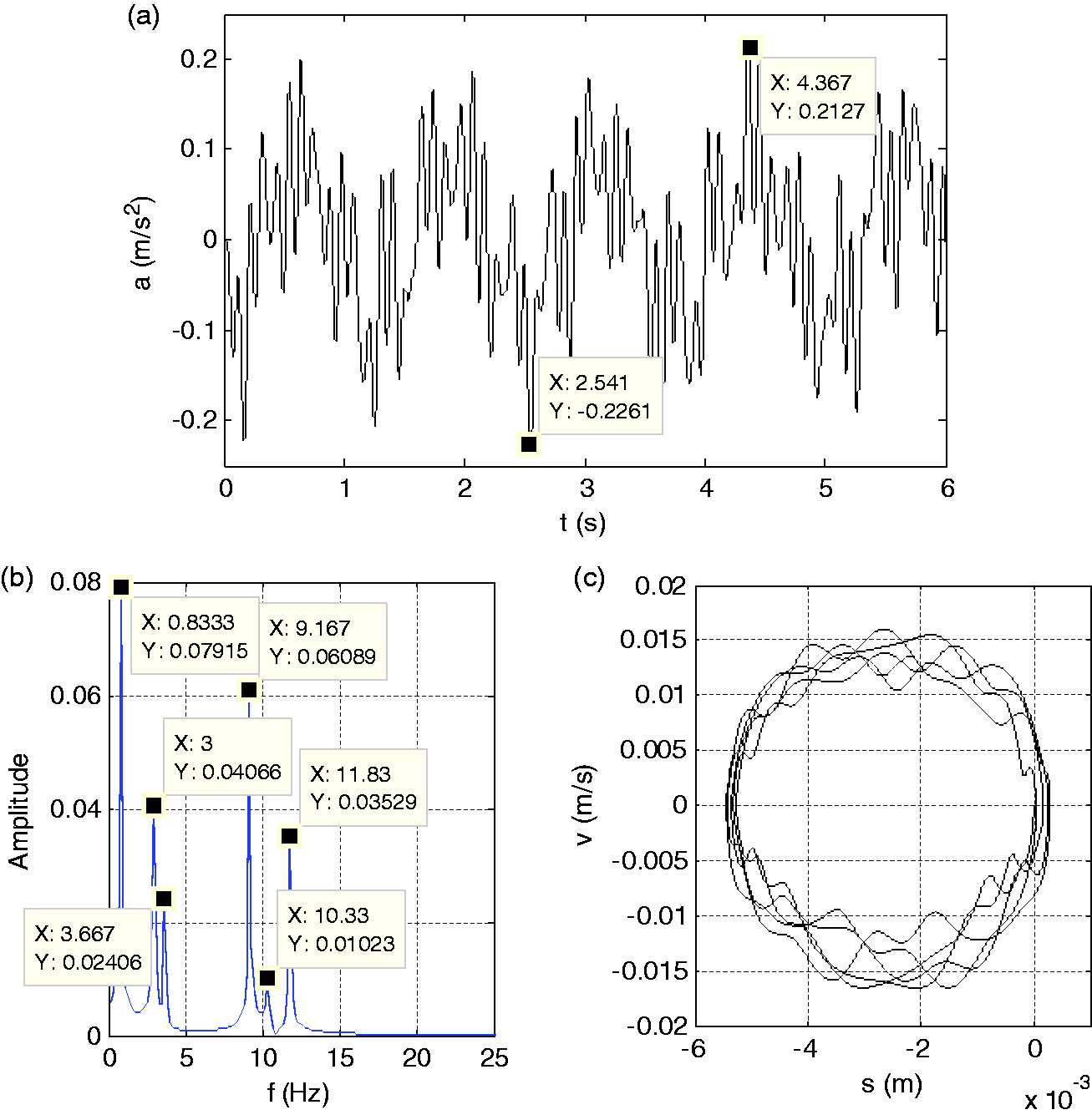
Vertical vibration simulation response of car body. (a) Vertical vibration acceleration curve. (b) Vertical vibration spectrum. (c) Vibration phase diagram.
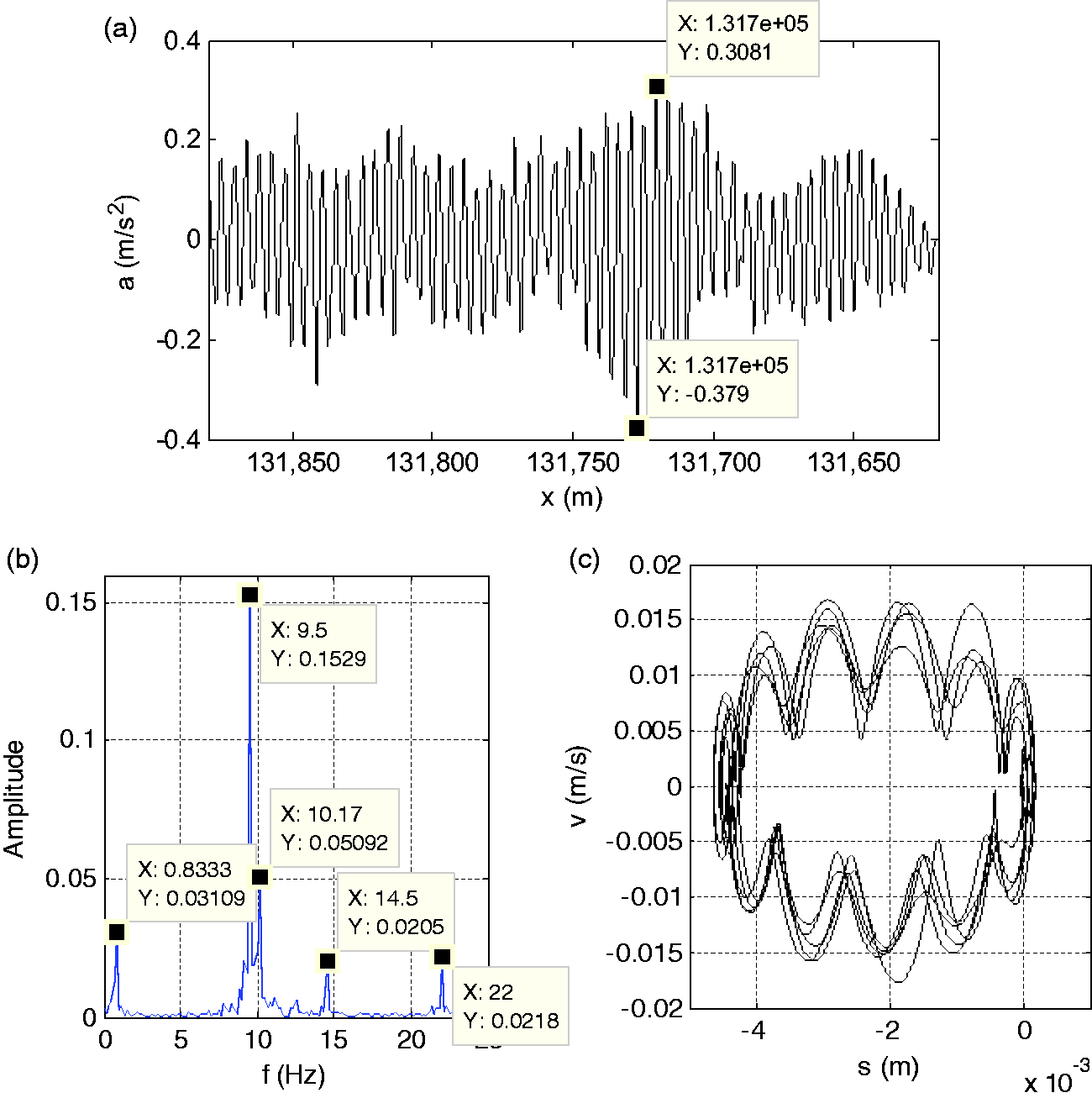
Analysis results of car body in wheel-track system inspection data. (a) Vertical vibration acceleration curve. (b) Vertical vibration spectrum. (c) Vibration phase diagram.
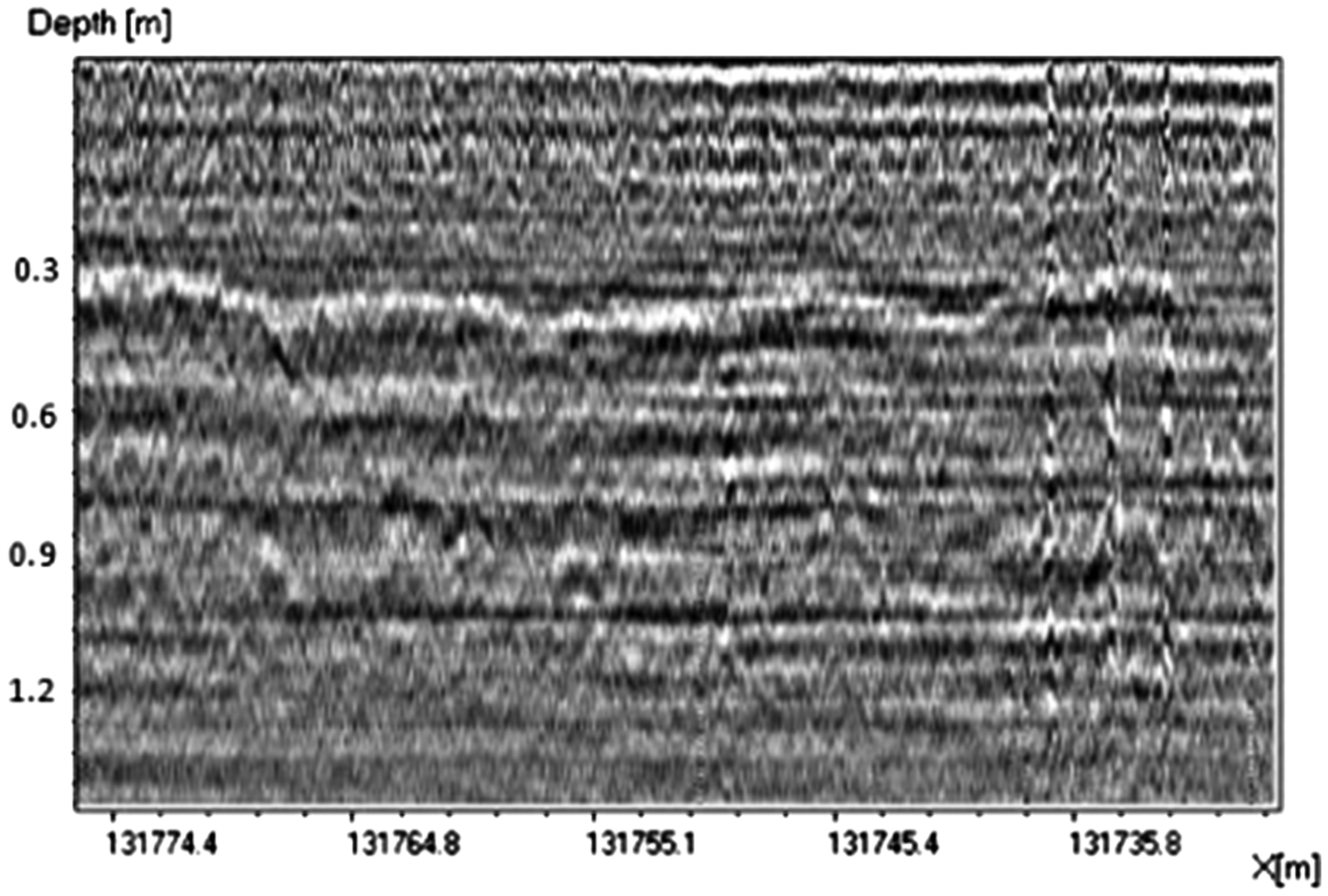
GPR ballast test result.
From Figure 14, it is obviously noted that the measured vertical acceleration of car body is about 1.73 times the simulation value. The response frequency 10.33 Hz shifts left in the simulation results, be 10.17 Hz in inspection analysis result, prompted the corresponding amplitude of response frequency 9.5 Hz to be increased, and the stability of system is decreased. Through GPR detection, the thickness of ballast bed is about 0.30 m to 0.35 m, and a certain thickness change and decrease of density is shown.
Da Cheng railway (up line) K178 + 240—K178 + 060
Detection speed is 106 km·h−1. The car body vertical vibration characteristics of simulation calculation are presented in Figure 15, the vibration test results are presented in Figure 16, and the GPR detection result is presented in Figure 17.
Vertical vibration simulation response of car body. (a) Vertical vibration acceleration curve. (b) Vertical vibration spectrum. (c) Vibration phase diagram.
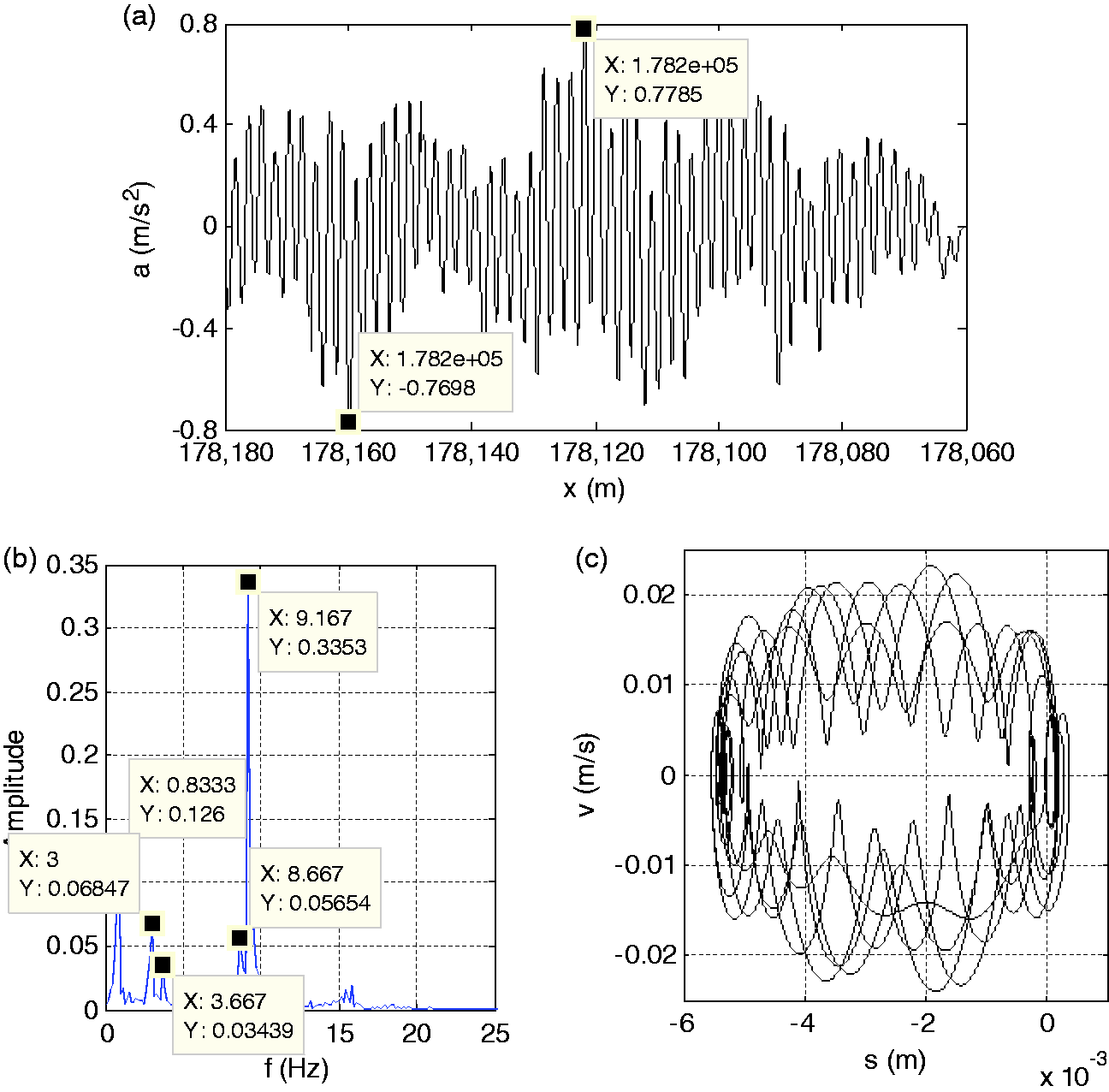
Analysis results of car body in wheel-track system inspection data. (a) Vertical vibration acceleration curve. (b) Vertical vibration spectrum. (c) Vibration phase diagram.
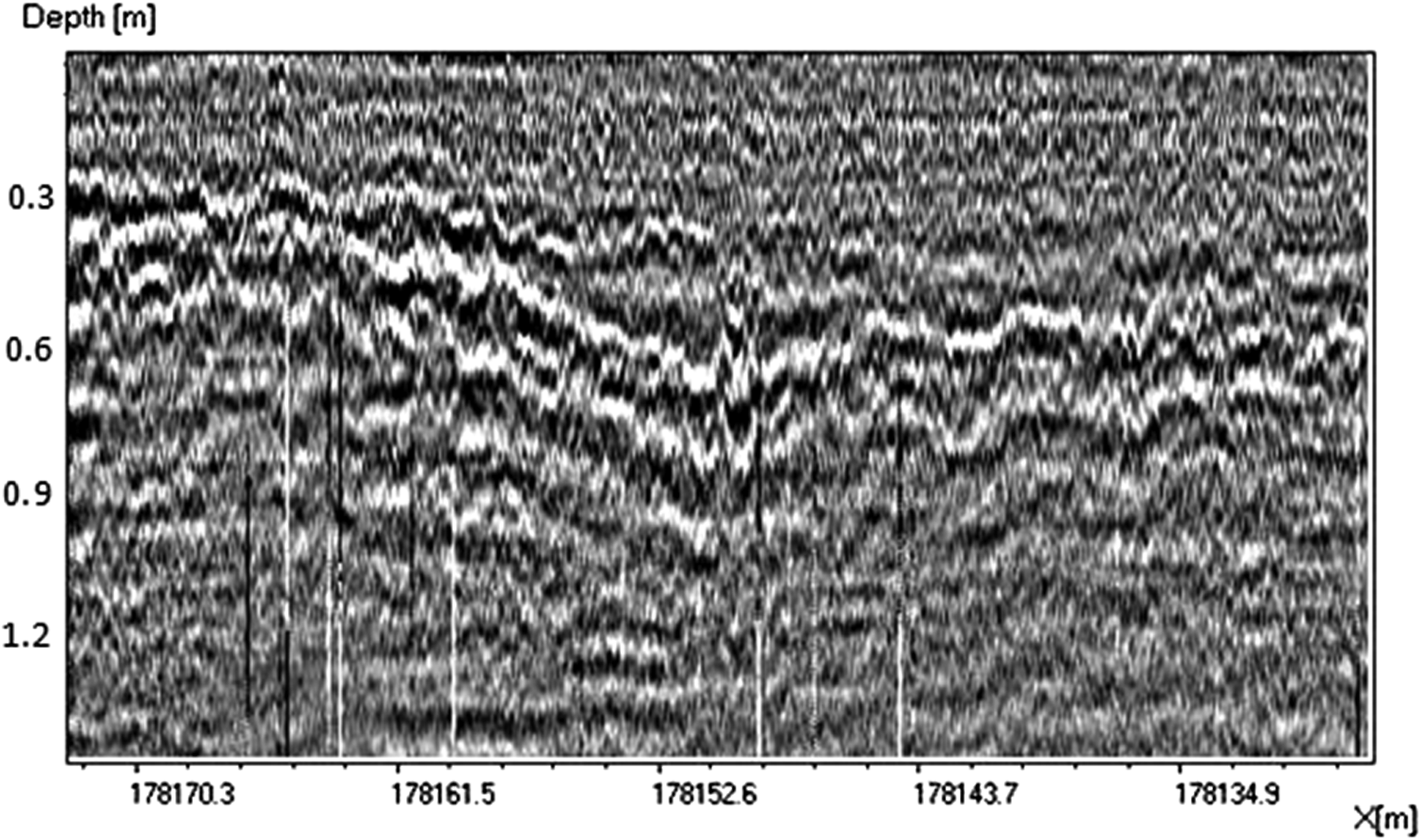
GPR ballast test result.
Compared to the data analysis of K131 + 880—K131 + 620, the measured vertical acceleration of car body is about four times the simulation value. The response frequency 10.33 Hz shifts left in the simulation results obviously, prompted the corresponding amplitude of response frequency 9.2 Hz to be increased quite significantly, and the stability of system is decreased evidently. Through GPR detection, the thickness of ballast bed is about 0.35 m to 0.65 m, and the thickness change rate and decrease of density is obviously greater than the one at K131 + 880—K131 + 620. The response frequency 10.33 Hz changes to 8.67 Hz, over the closest 9.17 Hz irregularity frequency.
Table 6 consisted of simulation results ignoring the change of ballast bed mechanical properties, measured results of the track inspection, and the results of GPR ballast bed.
Statistical table of simulation analysis and experimental results.
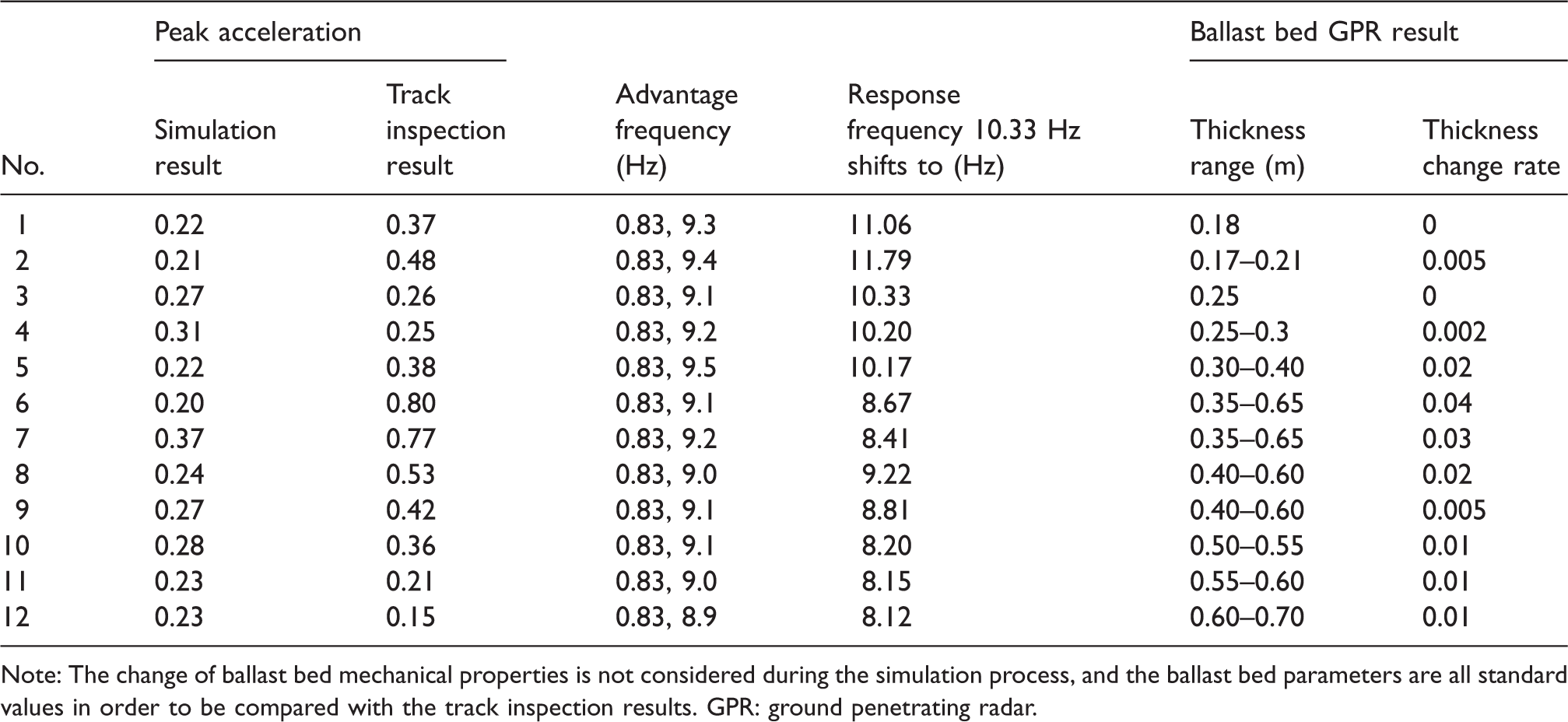
Note: The change of ballast bed mechanical properties is not considered during the simulation process, and the ballast bed parameters are all standard values in order to be compared with the track inspection results. GPR: ground penetrating radar.
Therefore, the amplitude of car body vertical vibration acceleration reaches maximum, when the ballast bed thickness is between 0.35 m and 0.65 m in Da Cheng railway. The stronger the bed thickness suddenly changes, the greater the acceleration of vibration increases. The bigger the difference between test results and simulation results is, the worse the stability of system is, and the more obvious the response frequency 10.33 Hz shifts left.
Conclusions
In this article, the vehicle-track system Simulink nonlinear dynamic model is established. The car body vertical vibration characteristics under vertical medium-wave track irregularity are solved and verified by field test, the following conclusions are obtained:
The first five vertical vibration natural frequencies of system are 0.8 Hz, 10.4 Hz, 23.9 Hz, 74.9 Hz, and 549.6 Hz. The second vertical vibration natural frequency 10.4 Hz is the sensitive frequency of car body. Under the same amplitude, when 10.4 Hz is the excited frequency, the car body vertical vibration acceleration reaches the maximum. In the case of irregularity wavelength obtained by track inspection, the corresponding resonance speed for a long time driving process should be avoided. When the ballast-subgrade stiffness is decreased, as the response frequency, the second-order natural frequency 10.3 Hz of car body vertical vibration shifts left. The general trend shows that the vertical vibration acceleration is decreased. However, when the stiffness is 3.0 × 107 N·m−1, the acceleration has a maximum, which is 0.6 m·s−2. The vertical acceleration of car body increases with the increase of nonlinear stiffness. According to the spectrum, the second advantage frequency 10.33 Hz offsets positively with the increase of nonlinear stiffness. When the ballast bed thickness is between 0.35 m and 0.65 m in Da Cheng railway, the amplitude of car body vertical vibration acceleration reaches maximum, and the stronger the bed thickness suddenly changes, the greater the acceleration of vibration increases. When the ballast bed thickness is not enough, the vertical vibration acceleration increases obviously.
In this article, the physical correlation between two tests is established for the first time through the correctness of car body vertical acceleration data in track inspection that is verified by GPR ballast detection. It has a great engineering significance for future infrastructure testing, vibration research, and data analysis.
Footnotes
Acknowledgment
The authors would like to express the heartfelt thanks to the Joint Fund for Basic Research of High-speed Railway (projects No. U1434211), the Project of Science & Technology Research and Development Plan of China Railway Corporation (projects No. 2017G003-H) and all the researchers who provided assistance during the study.
Declaration of conflicting interests
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: Yang Lei and Falin Qi are both the first authors and their contribution to this article is equal.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: It is an honor for authors that the article is supported by the, Project of Science & Technology Research and Development Plan of China Railway Corporation, under projects No. 2017G002-Q. The fund undertaken by China Academy of Railway Sciences focus on the basic theoretical research of the vehicle and railway engineering technology, which is designed to play the guiding and coordinating role of National Natural Science Foundation of China.