
Abstract
This paper presents a fuzzy adaptive cuckoo search algorithm to improve the cuckoo search algorithm, which may easily fall into a local optimum when handling multiobjective optimization problems. The Fuzzy–Proportional-Integral-Derivative (PID) controller design for an active micro-suspension system has been incorporated into the proposed fuzzy adaptive cuckoo search algorithm to improve both driving comfort and road handling. In the past research, a genetic algorithm was often applied in Fuzzy–PID controller design. However, when the dimension is high and there are numerous local optima, the traditional genetic algorithm will not only have a premature convergence, but may also be trapped in the local optima. In the proposed fuzzy adaptive cuckoo search, all parameters of the PID controller and fuzzy rules are real coded to 75 bits in the optimization problem. Moreover, a fuzzy adaptive strategy is proposed for dynamically adjusting the learning parameters in the fuzzy adaptive cuckoo search, and this indeed enables global convergence. Experimental results verify that the proposed fuzzy adaptive cuckoo search algorithm can shorten the computing time in the evolution process and increase accuracy in the multiobjective optimization problem.
Introduction
Engineering design problems often involve highly nonlinear constraints and are related to multiobjective optimization problems. In dealing with these real-world optimization problems, many engineers still set or adjust parameters through past knowledge or experience for single objective optimization. When operating in this manner, compromises and approximations are required, but true optimization is hard to achieve, as these objectives are usually in conflict with each other.
In academia, the area of optimization has received much attention in recent decades. Many various new algorithms have been developed and applied in the industry, which leads to savings on both time and cost. Moreover, many real-world problems are NP-hard, which can be effectively solved by using metaheuristic algorithms based on intelligent knowledge. Currently, evolutionary algorithms, inspired by events in nature, have gained enormous attention in the field of intelligent computing. The genetic algorithm (GA) and particle swarm algorithm (PSO) are traditional well-known algorithms, while the immune algorithm and cuckoo search (CS) are subsequent algorithms. These metaheuristic algorithms play a major role in multiobjective global optimization problems.
The PSO was proposed by Kennedy and Eberhart in 1995,1,2 which is an optimization technique based on swarm intelligence. Xin et al. 3 proposed several classification mechanisms and a versatile taxonomy to differentiate and analyze various hybridization strategies on differential evolution and PSO. Chih et al. 4 also proposed a new PSO algorithm for solving economic statistical designs of control charts, which belong to a mixed discrete-continuous nonlinear problem. A penalty objective function was defined to encourage the particles to explore both the feasible and infeasible regions near the border of the feasible area. To further solve the multidimensional knapsack problem (MKP), Chih et al.5,6 proposed two PSO algorithms based on a binary PSO with time-varying acceleration coefficients. These two PSO algorithms were used as the foundation to support the novel self-adaptive check and repair operator methods. Therefore, changing different types of pseudo-utility ratios produces solutions with better results when solving MKP. On the other hand, Ciornei and Kyriakides 7 presented a novel heuristic-hybrid optimization method, which combined API (a special class of ant colony optimization) and RCGA (real-coded genetic algorithm), to solve the nonconvex economic dispatch problem in power systems. The downhill behavior of API will avoid the GA search strategy being trapped in local optima. In 2016, Garg 8 proposed an efficient hybrid PSO–GA algorithm for constrained optimization problems with the help of the parameter-free penalty function. In this PSO–GA, PSO works toward improving the vector, while GA has been used for modifying the decision vectors using genetic operators.
Yang and Deb 9 extended the CS for single optimization to the multiobjective cuckoo search (MOCS) for solving multiobjective problems. The superiority of MOCS can be attributed to the fact that the CS uses a combination of vectorized mutation, crossover by permutation and Lévy flights, and selective elitism among the best solutions. Jin et al. 10 developed a CS-based PID controller with investigation on the parameters of the CS including nest number, discovered probability, and step length.
Basically, PSO has the fast convergence characteristic and the drawback of easily getting trapped in the local optimum, which is an especially important issue for multiobjective global optimization problems. In the proposed fuzzy adaptive cuckoo search (FACS) algorithm, the nest positions are real coded to evolve to an optimum. When the FACS is applied to Fuzzy–PID controller design for an active suspension system, all the parameters relating to fuzzy rules or PID controller are real coded to 75 bits. With the incorporation of roulette wheel selection and the proposed fuzzy adaptive strategy, the learning parameters, such as learning rate or step size, will be adaptively decided, and this causes the FACS to effectively increase the searching ability and directions to enable global convergence and optimization accuracy. The rest of the paper is organized as follows: “Fuzzy adaptive cuckoo search algorithm” section presents the proposed FACS algorithm, with the real coding and the fuzzy adaptive strategy included. In “The optimal control problem” section, the optimal control problem and structure of an active suspension system is described and configured. The simulation results are shown in “Simulation results” section. The final section offers brief concluding comments.
Fuzzy adaptive cuckoo search algorithm
After a study of the reproductive behavior of cuckoo birds and characteristics of Lévy flight, Yang and Deb 11 developed the CS algorithm at the University of Cambridge in 2009. Preliminary research shows that CS is very promising and outperforms some existing algorithms, such as GA and PSO.
Some species of cuckoos are brood parasites, and they neither build their own nests nor hatch their eggs, but specialize and lay eggs that closely resemble the eggs of their chosen host. Some host birds are able to distinguish cuckoo eggs from their own, and they will either throw those alien eggs away or simply abandon their nests and build a new nest elsewhere, which will influence the egg’s survival rate and the cuckoo population in the next generation.
In nature, the search for food by animals or insects is in a random or quasi-random manner. This is similar to the flight behavior of birds, where flight direction depends implicitly on a random probability. Lévy flight is a specialized behavioral theory that looks at random animal or insect flight and is applied in the mathematical model of the CS algorithm for simulating the reproductive behavior of cuckoo birds. In general, Lévy flights are a random walk and Lévy step is drawn from the Lévy distribution. During the flight, a larger step size will expand the scope of search and enable diversity of the population, which is suitable for the early stages of the search to avoid falling into a local optimum. In the later period of search, a smaller step size is appropriate for converging to the global optimal solution. The proposed FACS algorithm is outlined as follows:
A cuckoo only lays one egg at a time and randomly finds a nest to hatch it. The egg in the best nest will be kept in the next generation. For
Based on the above three idealized rules, the new search space Xi (t + 1) at the time


A simple scheme to obtain the Lévy step is from the Mantegna algorithm in 1992
16


The coding of FACS
In this paper, the real coding is applied for real-parameter processing in FACS, instead of binary coding. There are 75 real parameters, representing fuzzy memberships and fuzzy linguistic variables, in each target solution for the Fuzzy–PID controller design12–14
The coding bits from bit 1 to bit 75 are denoted as

As for fuzzy linguistic variables, such as NL, NM, NS, ZE, PS, PM, and PL, they are coded by an integer from 1 to 7. All fuzzy rules will be described by 49 bits, i.e. S22(N) ∼ S70(N). Moreover, the PID parameters (
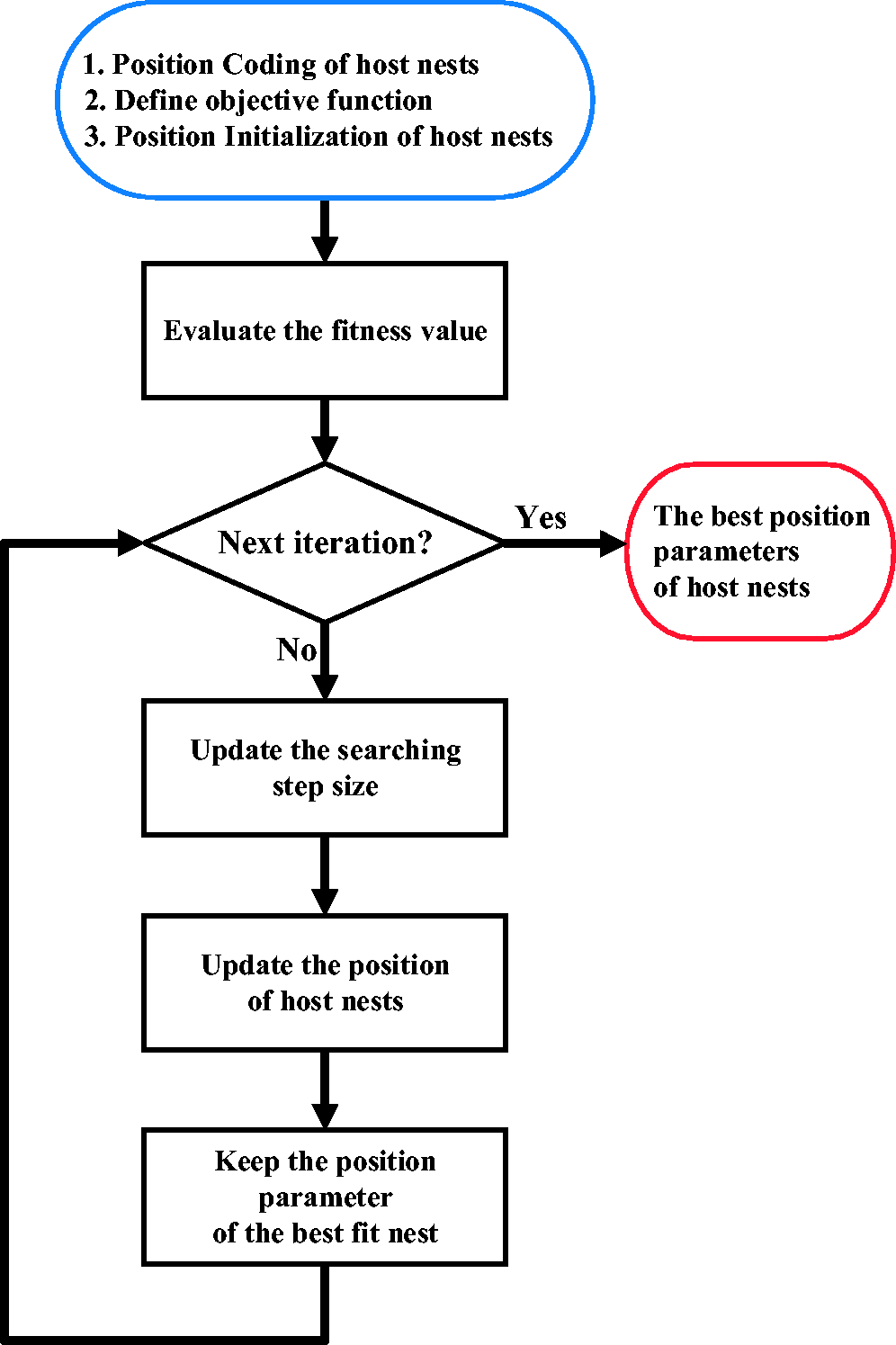
Flow chart of the proposed FACS.
The fuzzy adaptive strategy
For the discovered probability
On the contrary, in the late period of the FACS, larger

Fuzzy rule table for tuning
The optimal control problem
Automotive electronics have attracted tremendous attention and investment in the last few years, especially the active suspension system. At present, some traditional and passive suspension systems, with springs and dampers, have been installed or totally replaced by a force actuator with advanced control methodologies. The active suspension system possesses the ability to improve handling stability and driving comfort.
However, there usually exists nonlinear and uncertain dynamic characteristics in the suspension system. With an increase in the damping force of the shock absorber, automobile stability will improve and reduce road shock and vibration. But when we desire to offer comfort for passengers on the straight and smooth pavement, the damping force of the shock absorber should be smaller. So the trade-off between comfort and handling is an important issue to the suspension system. To verify the performance and feasibility of the proposed FACS, a Fuzzy–PID controller was designed to solve the multiobjective optimization problem. Figure 2 shows the active micro-suspension system model, which has been widely used in micro-suspension system design of the quarter-car model12–14
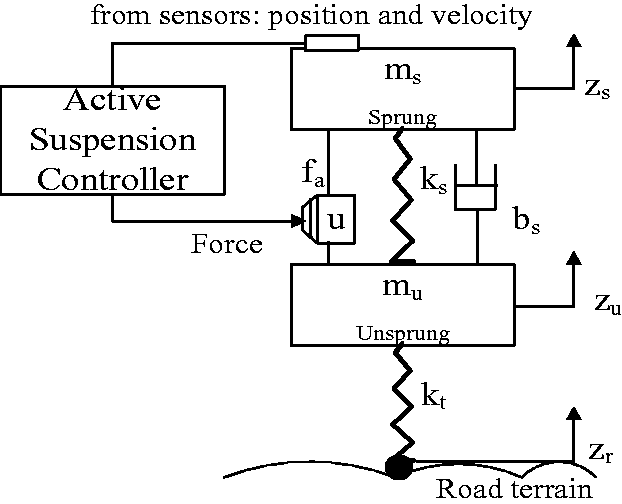
Active micro-suspension system for quarter-car model.
The dynamic equation of the active suspension system is


Parameter setting for quarter car model.
To simulate a realistic road surface, pseudorandom road profiles are simulated using stochastic processes (PSD, power spectral density function), as shown in equation (9)

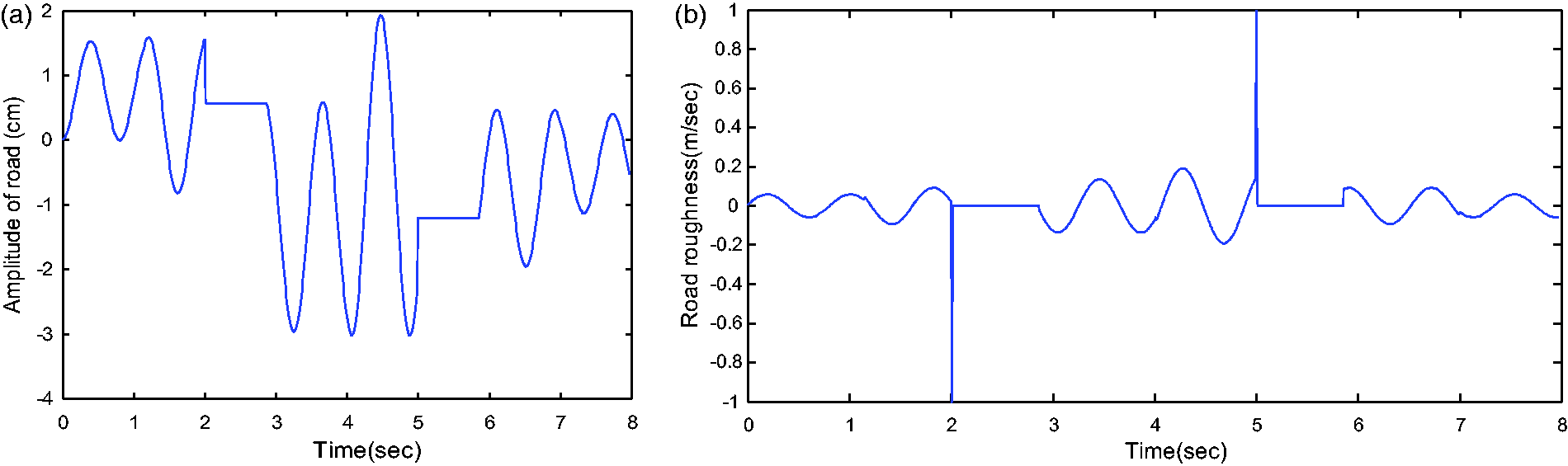
The road profile for real-time simulation (
During t = 0.01–1.15 s, V is 25 (m/s). Then the car begins to accelerate, and V becomes 30 (m/s) during t = 1.16–2.01 s.
During t = 2.02–2.87 s, the extremely bad roads are simulated by PSD.
During t = 2.88–4.02 s, V is 35 (m/s). During t = 4.03–5.00 s, V is 40 (m/s).
During t = 5.01–5.86 s, the extremely bad roads are simulated by PSD.
During t = 5.87–7.00 s, V is 30 (m/s). Then the car begins to decelerate, and V becomes 25 (m/s) during t = 7.01–8.00 s.
For an active suspension system, the road profile is the input and the outputs are 
The simulation time for the well-known step-like and pseudorandom road profile in equation (9) is set as 8 s, thus we have “800” samples in equation (10) with 


Finally, another important issue is to make sure that there is enough space between the spring mass and the tires, so it can prevent the tires from hitting the car body. A penalty strategy is set up in the system, limiting
Simulation results
In this paper, the Fuzzy–PID controller design for an active micro-suspension system has been incorporated into the proposed FACS algorithm. Figure 4 shows the proposed Fuzzy–PID control structure, where the optimal real parameters
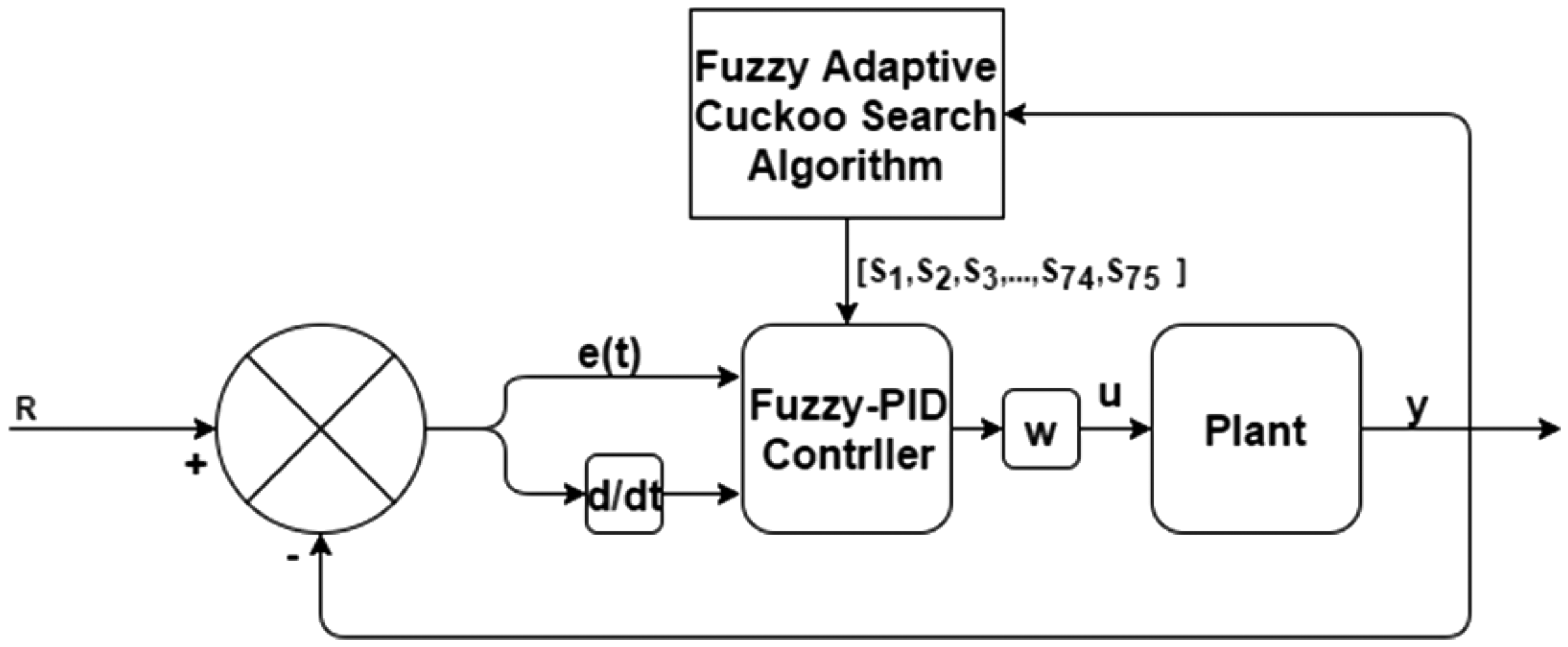
The improved Fuzzy–PID control structure by the proposed FACS.
The pavement responses with passive control, the proposed FACS control, and the conventional optimal linear feedback control are shown in Figure 5, including suspension deflection, sprung mass acceleration, and tire-ground beating distance. After evolution of 24 generations, we obtained the final optimal parameters
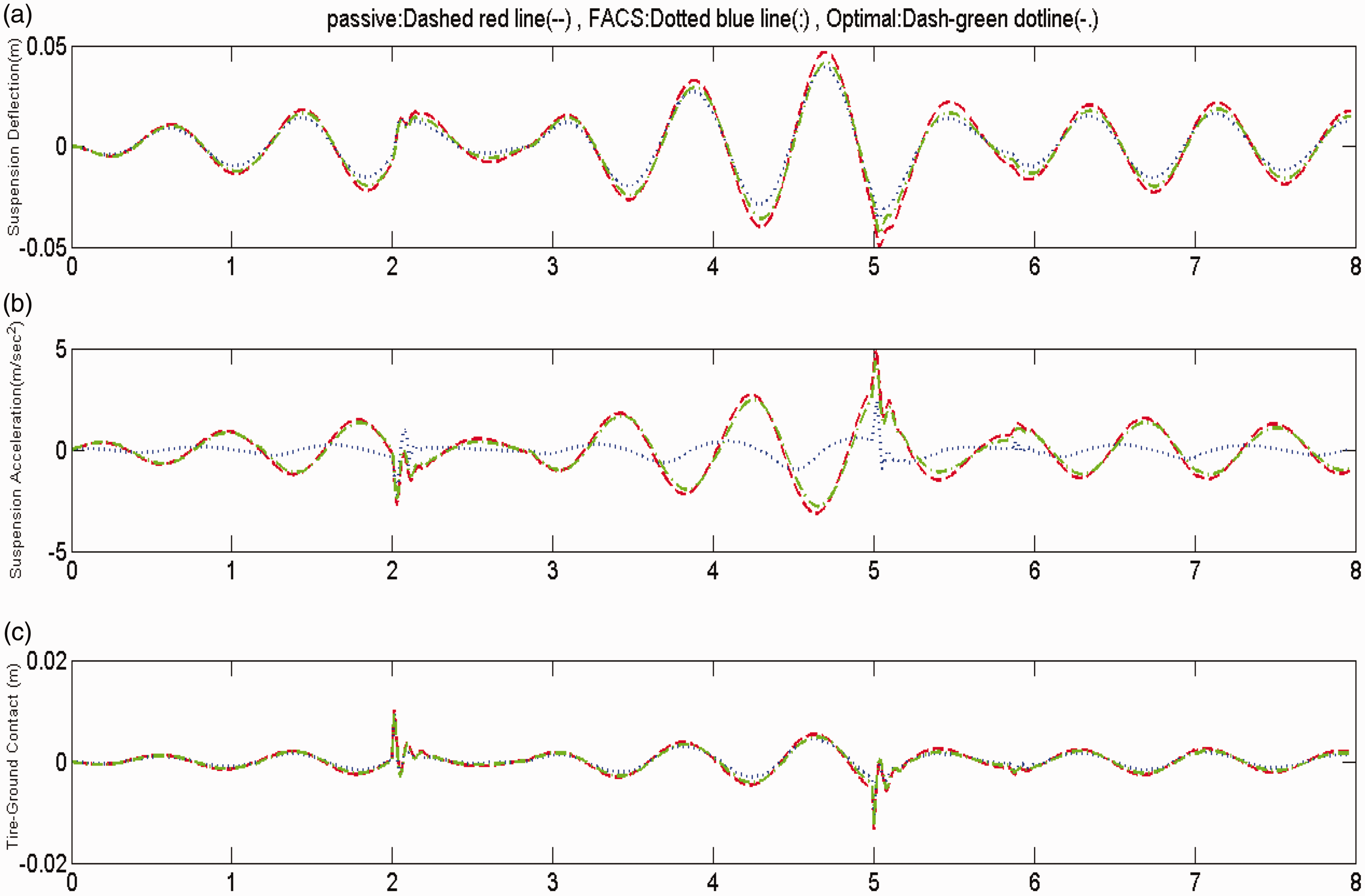
Pavement responses with passive (dashed red line), the proposed FACS (dotted blue line) and conventional optimal control (dash-green dotted line): (a) suspension deflection, (b) sprung mass acceleration and (c) tire-ground contact distance.
From Figure 5, it can be first observed that the maximum suspension deflection 
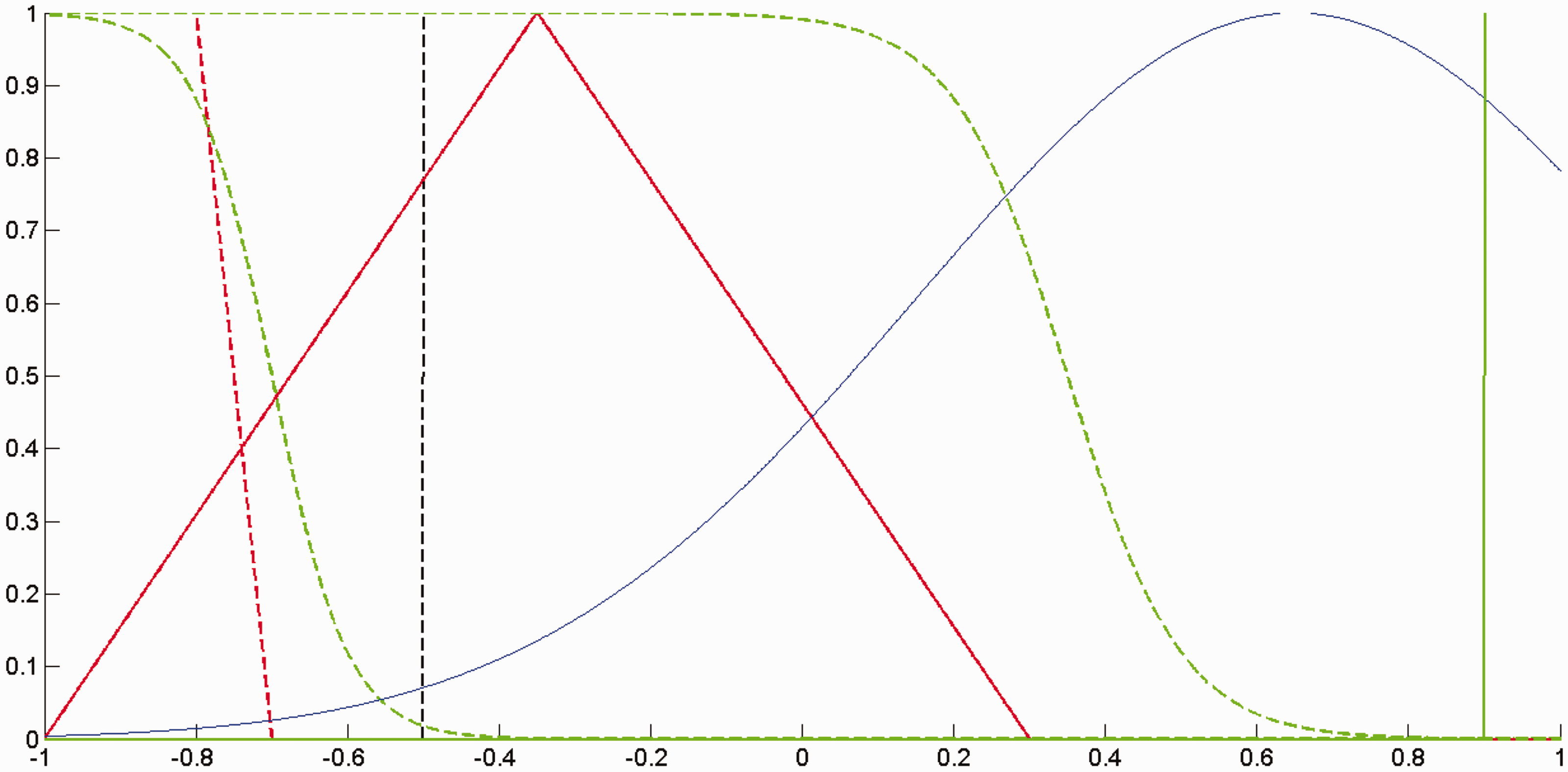
Membership functions after 24 generations of evolution.
The success of the proposed fuzzy adaptive strategy is exhibited in Figure 7. With the initial settings
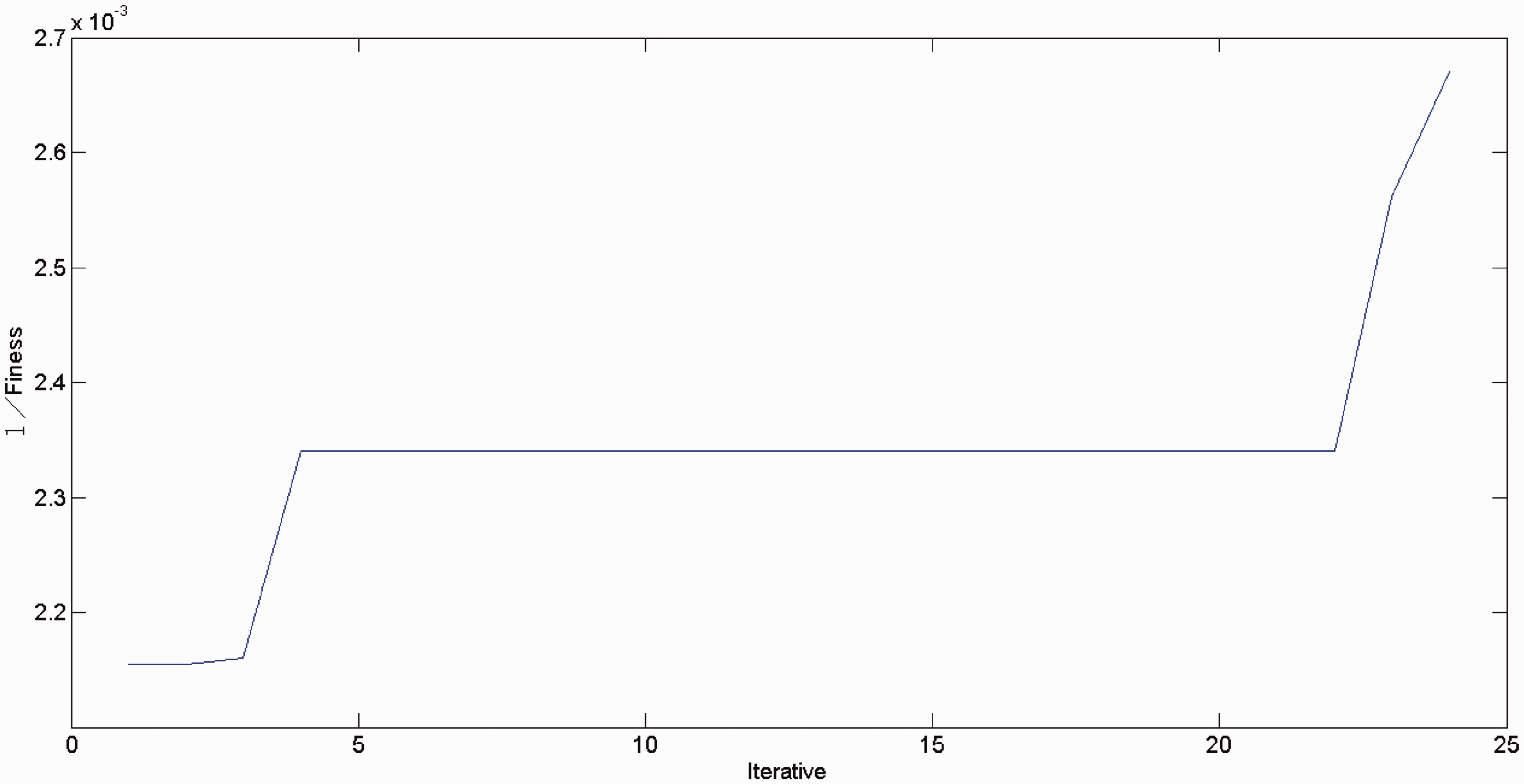
Evolution process.
The proposed FACS exhibits its efficiency in escaping from the local optimum and achieving F = 373.0060 (1/F = 2.67 × 10–3) in the 24th generation. In the Matlab environment, it takes 2736 s for the FACS to finish the optimization evolution of 24 generations, with each generation about 114 s. In comparison with the proposed FACS, our previous GA-based Fuzzy–PID control in 2009 12 had a similar performance but was inefficient because it needed 100 generations, 48 h of computing time, and was easily trapped in the local optimum.
Like other bio-inspired algorithms, GA or PSO, the CS must take many generations of evolutionary computing to ensure that the algorithm evolves to an optimum. For the proposed FACS, the roulette wheel selection, popular in GA, is employed to make better results inherited to the next generation, which is crucial in multiobjective optimization problems. This will improve the adaptability of the CS and enable the CS to have the ability to solve complex problems.
For the proposed FACS, the search space of nests is further divided into an inner-boundary and outer-boundary, where the border will be determined by fitness value F0 = 6000. When there is a nest solution with fitness value greater than F0, it will be defined as an outer-boundary nest. At this moment, the PID parameters will be reset to the initial values and the system will find the new target solution. This strategy is also to avoid creating too large of a search space and difficulty in convergence. Figure 8 shows the trajectory of PID parameter changes in 24 generations. The final distribution of
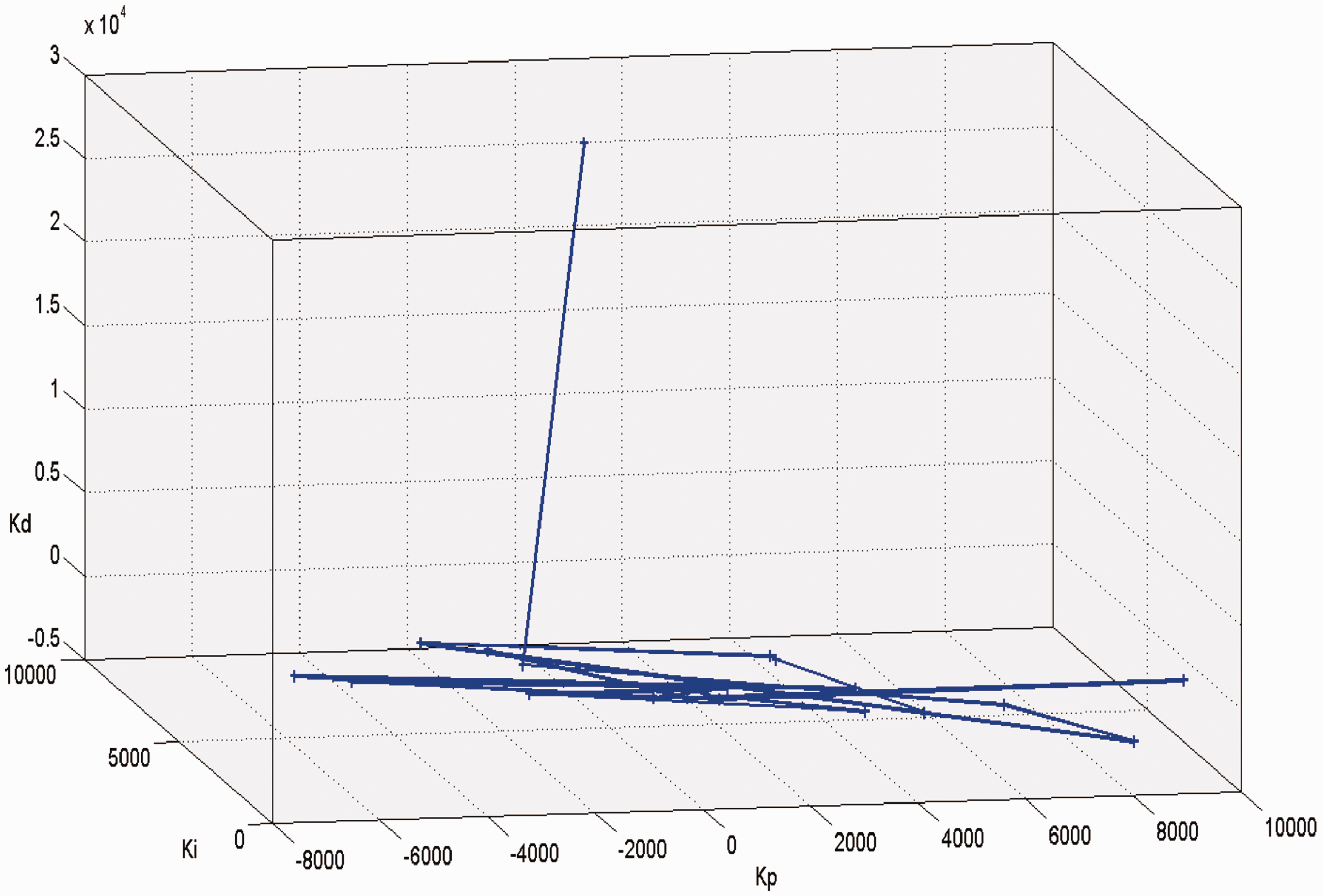
Trajectory of PID parameters changes.
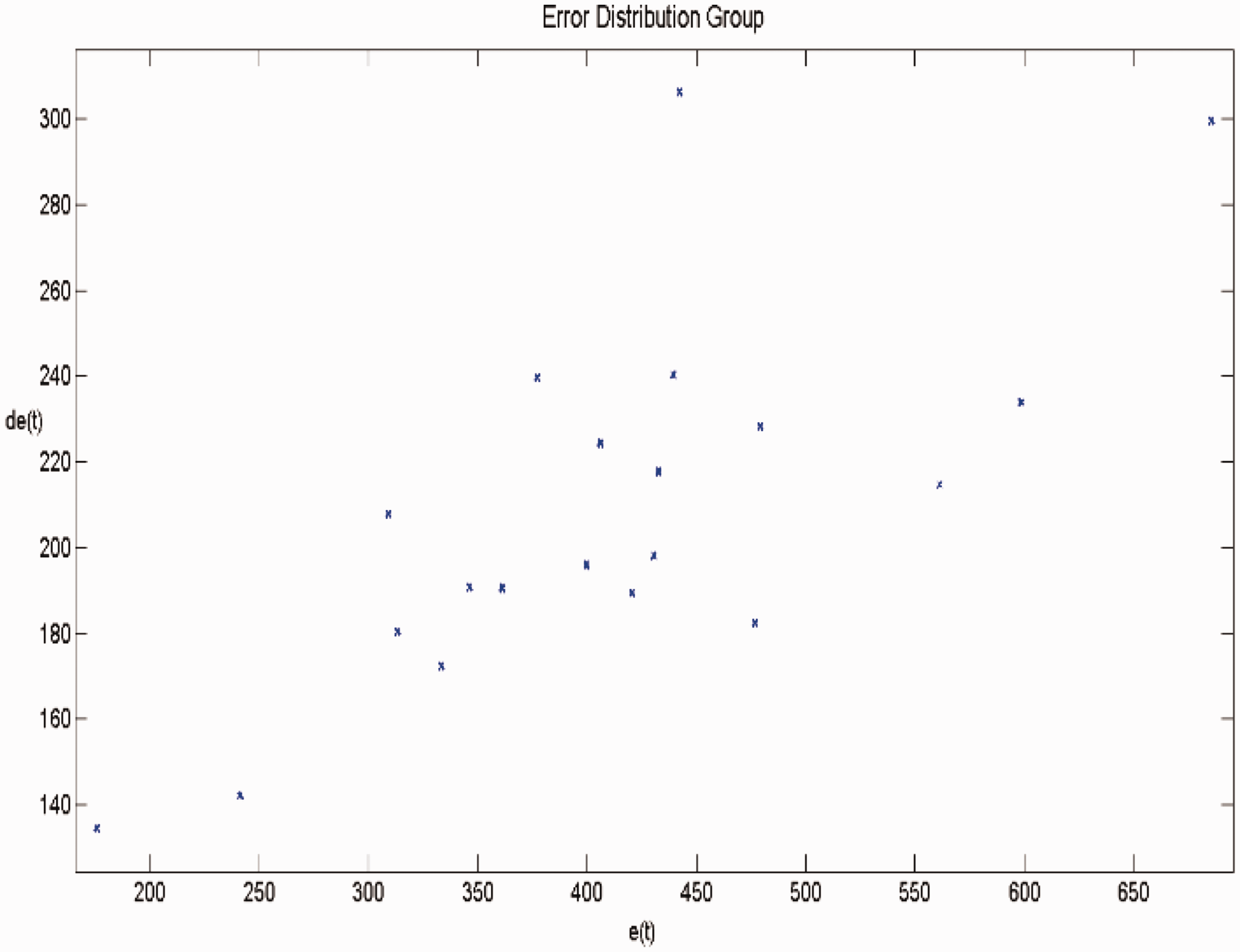
The final group distribution of
To address CS shortcomings of low accuracy and poor convergence, especially for multiobjective optimization problems, this paper proposes a novel FACS algorithm, which combines roulette wheel selection and dynamic parameter adjustment to effectively improve accuracy and convergence speed. A fuzzy adaptive strategy is presented for dynamically tuning
Conclusions
To solve the problem of nonlinear and uncertain dynamic characteristics in a suspension system, this paper might be the first one to propose a novel CS Algorithm to design a Fuzzy–PID controller for a quarter-car model with suspension system problems simplified to a multiobjective optimization problem. For a CS algorithm, the choice of the nest position is regarded as an important disturbance factor to increase accuracy in the optimization problem. The proposed FACS algorithm yields quicker convergence and enables global convergence for a practical multiobjective system. The active suspension system we designed has the ability to improve handling stability and driving comfort. The experimental results show that the proposed FACS algorithm has a good application prospect.
In recent years, deep learning approaches have gained significant interests and remarkable advances. The proposed FACS algorithm, a novel meta-heuristic algorithm, may further combine with deep learning networks to construct a more effective and predictive model for active suspension systems.
Footnotes
Author contributions
Ming-Tang Liu and Chun-Tang Chao developed the methodology and drafted the manuscript. Moreover, Chi-Jo Wang and Juing-Shian Chiou derived the formulas and completed the simulations. All the authors approved the final manuscript.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Ministry of Science and Technology, Taiwan, under grant nos 106-2221-E-218-001-MY2.