An approximate procedure for predicting the stationary response of a stochastically excited nonlinear Markovian jump system under wide-band random excitation is proposed. Firstly, a weighted-average system in probability can be established to approximate the original one. Then by using the stochastic averaging method, the weighted-average system was reduced to the one described by a one-dimensional averaged Itô equations. The approximate stationary probability densities of the original system are obtained for different jump rules by solving the associated Fokker–Plank–Kolmogorov equation. Finally, an example of Markovian jump Duffing system excited by wide-band random excitation to illustrate the proposed method in detail and the effectiveness of the proposed method is verified via comparing the analytical results with those from Monte Carlo simulation.
Markovian jump systems (MJSs) are a class of systems with the Markovian transitions between the 'forms' determined by random abrupt variations in their structures, and they can be used to model a large class of practical systems, such as target tracking systems, manufacturing systems, chemical process, power systems and economic systems. Since Krasosvkii et al. first introduced MJSs in 1960s,1,2 considerable attention has been devoted to the analysis and synthesis of MJSs.3–6 Necessary and sufficient conditions for moment stability were obtained by means of an explicit formula for the corresponding Lyapunov exponent for piecewise deterministic jump linear system.7 Kushner8 applied an almost sure stability concept to the jump linear systems. Krasosvkii studied the LQR control of the Markovian jump linear systems. Sworder9 solved the optimal control problem for finite time horizon using maximum principle. The ergodic control problem of MJSs is studied based on the dynamic programming principle.10 However, the previous study on MJSs mainly focused on the stability and optimal control.11–14 Little effort has been made to the research of the response of the MJSs, especially for stochastically excited nonlinear MJSs. Stationary response of nonlinear MJSs excited by Gaussian white noise has been studied by Huan et al.15 Development of methodology for analysis of nonlinear MJS is thus much deserving.
In the past two decades, substantial advances have been made in the field of nonlinear vibration. The notable numerical contributions on this subject are the use of harmonic balance method,16 multimode approach,17, 18 variational iteration method,19 homotopy perturbation method.20, 21 On the other hand, the nonlinear structures are often subjected to severe random loadings due to wind, wave, earthquake, etc. In many cases, it is much appropriate to treat random loadings as a wide-band noise with rational spectral density. Considering that the response of the nonlinear system is not a diffusive Markov process, it is difficult to directly apply the theory of diffusive Markov process to solve the response problem. Recently, a stochastic averaging method22–27 for quasi-Hamiltonian systems has been developed by Zhu and his co-workers. Due to the advantage of approximating the original system by diffusive Markov process, stochastic averaging method has been proved as a powerful technique to deal with the aforementioned difficult situations.
The objective of the present paper is to predict the stationary response of the SDOF nonlinear MJSs excited by external and parametric excitations of wide-band random processes. First a weighted-average system in probability without Markovian jump can be established to approximate the original one. By using stochastic averaging, the averaged Itô equations governing the amplitude envelope for each form are then obtained. And the associated Fokker–Planck–Kolmogorov (FPK) equation is resolved, from which the approximate stationary probabilities for assessing the long-term behavior of the original system for different jump rules are finally obtained.
Formulation of problem
Consider a single degree-of-freedom (SDOF) stochastically excited nonlinear system with Markovian jump
where is the nonlinear stiffness; is a small parameter; denotes light Markovian jump damping; () represent the Markovian jump coefficients of weakly external and (or) parametric random excitations; are wide-band stationary and ergodic random processes with zero mean and correlation functions or spectral densities . is a continuous-time Markovian jump process representing the model or form in which the system operates. takes discrete values in a given finite set with the transition probability
where represents the probability that the system takes the form at time given that it has the form at time . for is the transition rate from th form to th form and
Equation (1) can be used for instance, to model a class of linear or nonlinear systems whose random changes in their structures may be a consequence of abrupt phenomena such as component and/or interconnection failure. Our primary concern here is the stationary response of the system (1).
Stationary probability of
For a continuous-time Markov process, the transition probability of system’s form s(t) satisfies4,28
where is the transition probability defined by equation (2). Substituting equation (3) into equation (4) and letting yields the following Markovian forward equation
Multiplying both sides of equation (5) by and summing from 1 to l yields
The stationary probability of Markovian jump process can be obtained by letting as
Note that
Then, the stationary probability of the Markovian jump process s(t) can be obtained by solving equations (10) and (11).
Averaged equation
In this section, a two-step averaged method is used for original system. First a weighted-average system in probability can be established to approximate the original one. Then a stochastic averaging method is applied to the weighted-average system to transition the system state from rapidly varying of velocity and displacement into the slowly varying form of amplitude.
The first step
Substituting the solved stationary probability into equation (1), a weighted-average system in probability can be obtained as follows
According to the limited averaging principle,29 as , the solution of the system (12) converges in probability to the solution of system (1). After the weighted averaging, the original system can be approximated by the one without Markovian jump.
The second step
When ε is small, system (12) has periodic random solutions around the trivial solution. The sample solution can be assumed to be in the following form30
where denotes the amplitude of the oscillator, and
denotes the instantaneous frequency. is the potential energy. are all random processes. and are called generalized harmonic functions. can be expanded into Fourier series
Integrating equation (15) with respect to from 0 to yields average period
Treating equation (13) as a generalized van der Pol transformation from to , the following differential equations for and can be obtained
where
Since is a small parameter, the above relation indicates that is a slowly varying process, while is a usually rapidly varying process with respect to time. According to the Khasminskii’s theorem,31 in equation (17) converges weakly to a diffusive Markov process in a time interval of order as . Using the formula in the Khasminskii’s theorem and averaging the drift and diffusion coefficients with respect to yield the following partially averaged Itô stochastic differential equations.
where are standard Wiener processes
and denotes the averaging operation with respect to from 0 to , i.e.
To obtain the explicit expressions for and in equation (20), the following steps were taken: first expanding , into Fourier series with respect to Φ, integrating with respect to τ and then averaging with respect to Φ.
The reduced FPK equations associated with the averaged Itô equations are in the following forms
where is the stationary probability density of the amplitude. is obtained readily by solving equation (22) using the finite difference method. The stationary probability density of the generalized displacement is then obtained as
where is the stationary joint probability density of the generalized displacement and generalized momenta. It is defined as
is the stationary joint probability density of the generalized displacement and generalized momenta.
Note that rigorous analysis of the errors committed by stochastic averaging has not been reported in the open literature. So, analytical quantification of the errors of the method proposed can only be examined by comparison with direct simulations.
Numerical example
To demonstrate the validity and accuracy of the proposed method, considering a stochastically excited nonlinear oscillator that is capable of independent Markovian jump and governed by
where is Markovian jump coefficient of linear damping; is Markovian jump coefficient of external and/or parametric random excitation; is a continuous-time Markov process representing the system's form with the transition probability defined in equation (2). takes discrete values in a given finite set . are independent stationary and ergodic wide-band noises with zero mean and rational spectral densities
can be regarded as the output of Gaussian white noises to the following first-order linear filters
where are Gaussian white noises with intensities .
For the system (25), the instantaneous frequencies are of the following form
can be approximated by the following finite sum with a relative error less than 0.03%
where
Following the averaging steps in equations (12) to (20), the averaged Itô equation of system (25) with Markovian jump process is obtained
where and are given in Appendix 1.
The associated averaged FPK equation of the Itô equation (31) is
The stationary probability density can be obtained by solving the associated FPK equation (32) numerically. The stationary probability densities and are then determined by equations (23) and (24).
Two-form system
In this case, and . Some numerical results are obtained as shown in Figures 1to 3 for system parameters: Characterize the transition rate between the form and the form by a transition matrix . Three special cases are considered, with
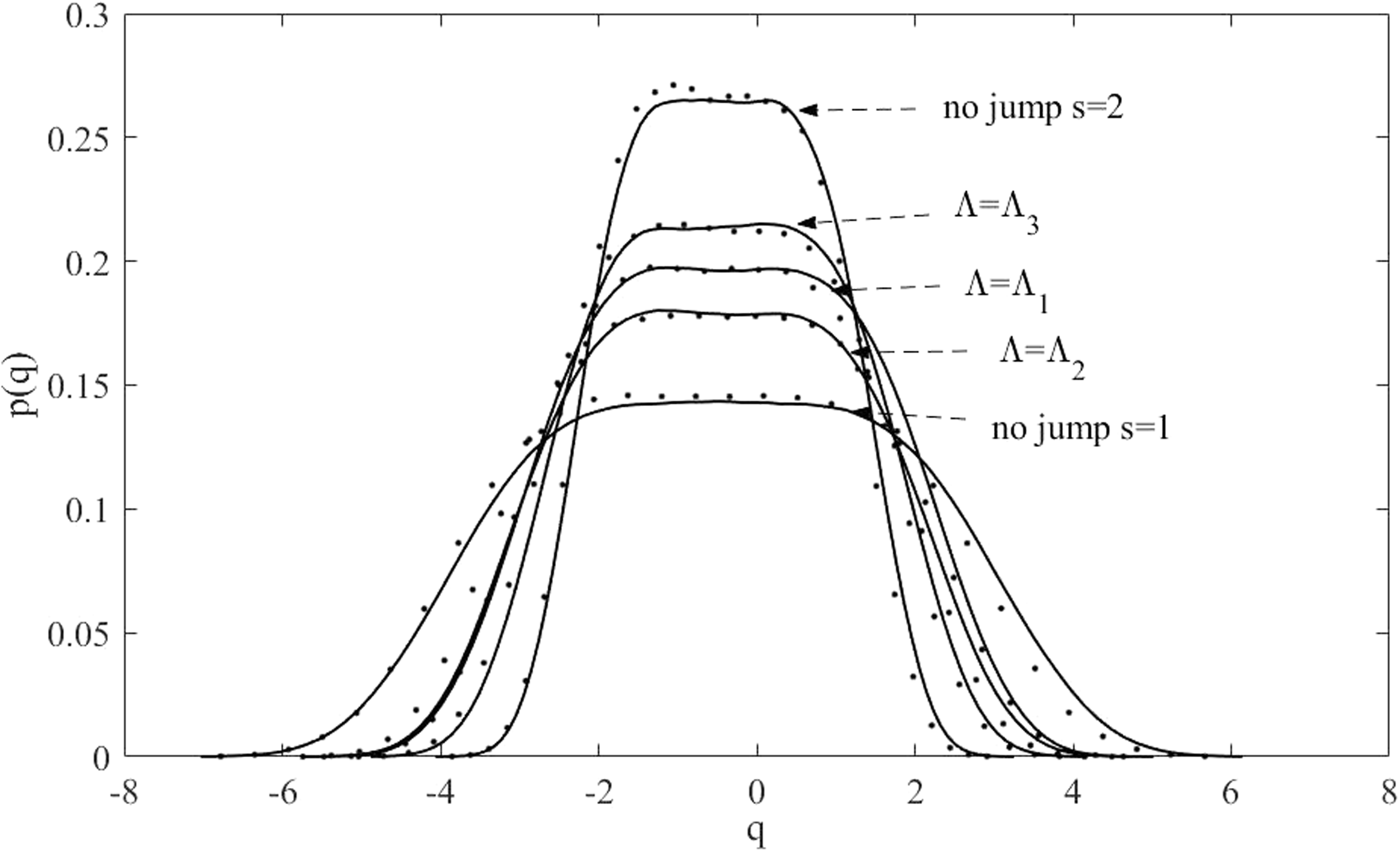
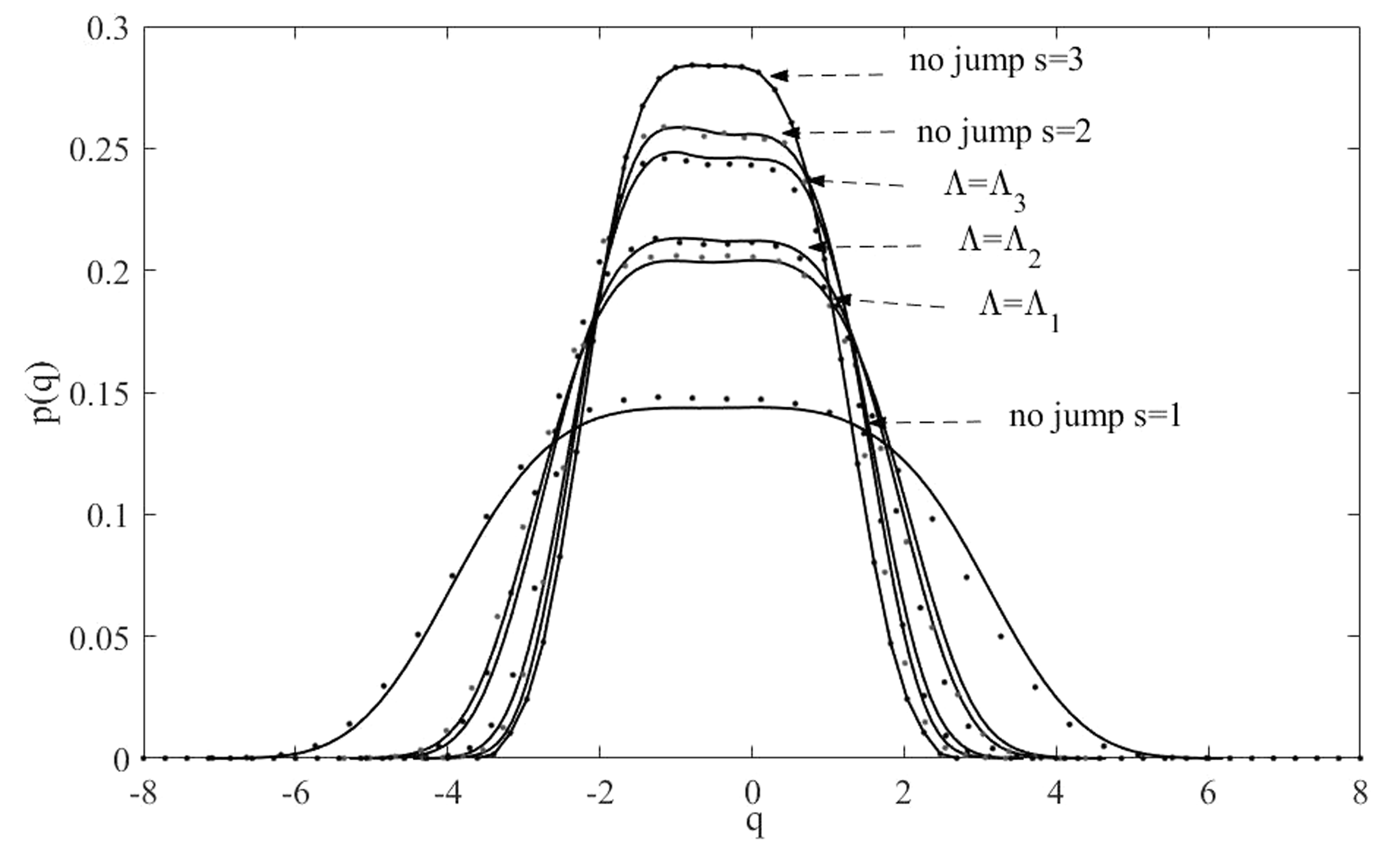
The stationary probability density of displacement is shown in Figure 1, when the transition rates are specified by the three transition matrices in equation (33). The probability densities when Markov jump process is fixed at either or are also plotted. Obviously, when the system operates in the form , it has larger damping coefficients and smaller amplitudes of wide-band excitations than when it operates in the form . There is a higher probability that will be located near their equilibrium when the system spends more time in the form . Hence, as shown in Figure 1, has the largest mode around if , and the mode around will decrease as the system cycles through , , and .
The stationary probability density of displacement of 2-form system (25) for , , in equation (32), and when the system is fixed at and .
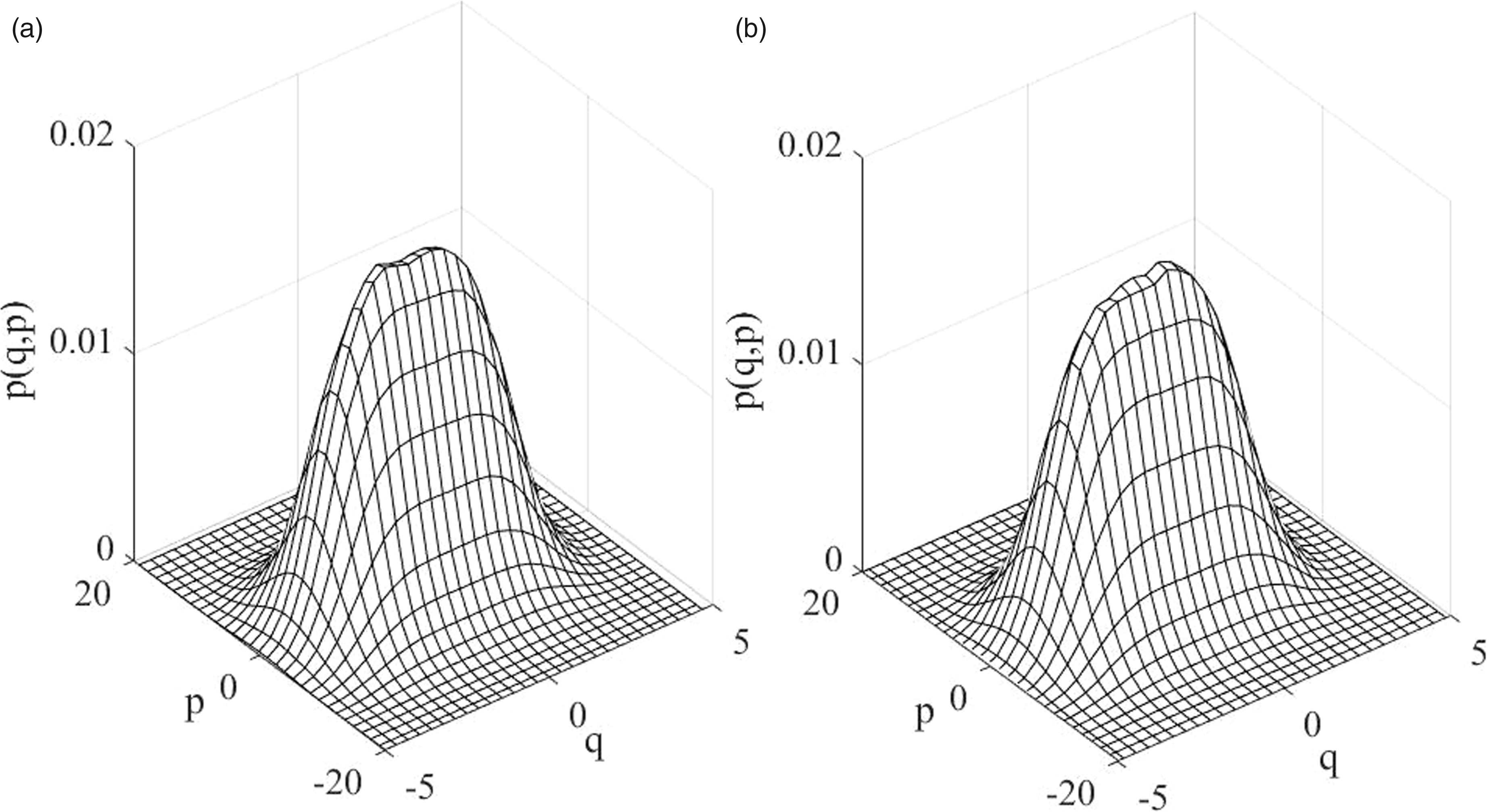
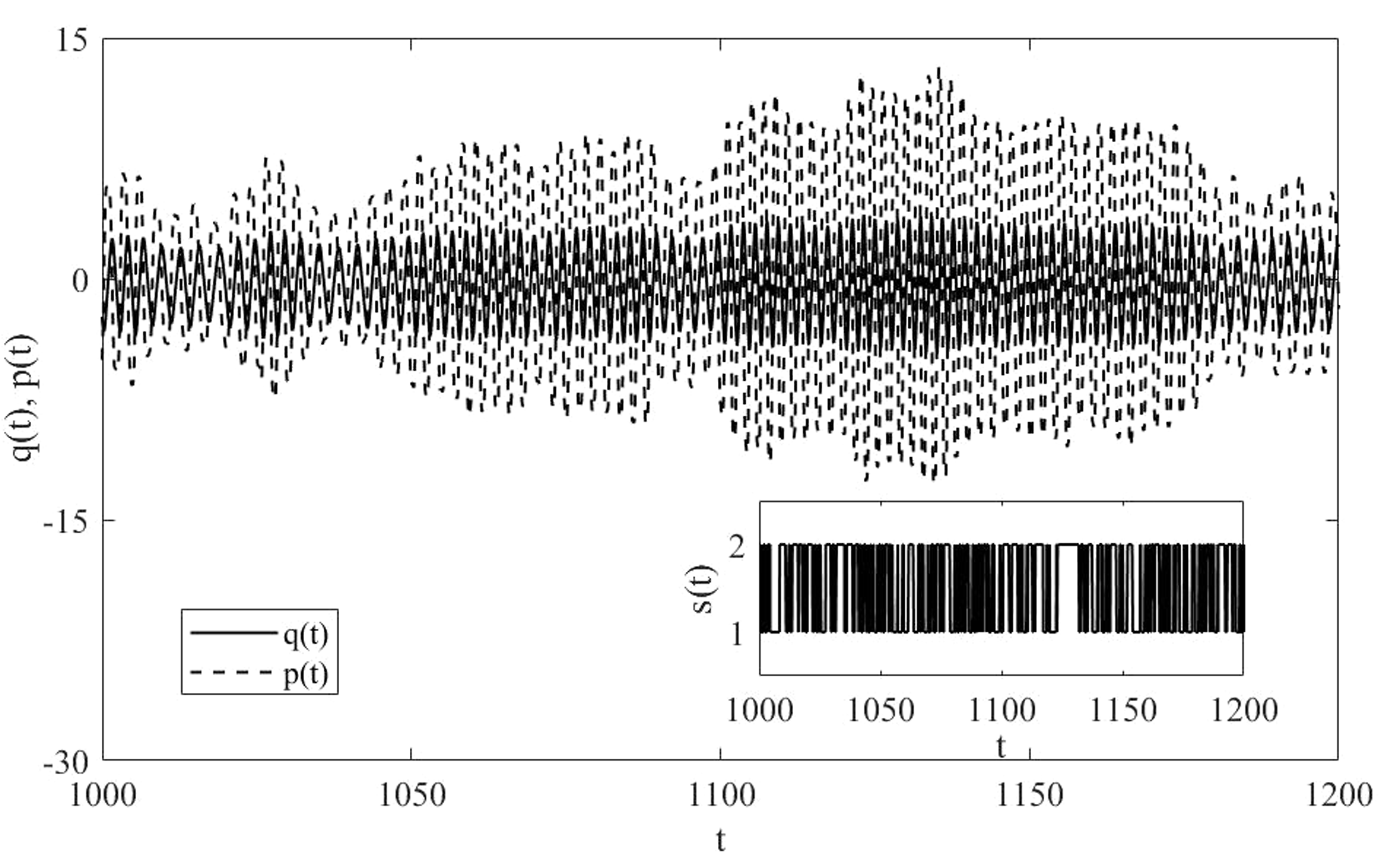
The lines are obtained from solving averaging FPK equation (32), while the dots are obtained by direct simulation of system (25). The joint probability densities of the displacement and momenta obtained from equations (32) and (25) are shown in Figure 2(a) and (b), respectively. Observe that the analytical results agree well with those from digital simulation of original system (25), which demonstrates the validity and accuracy of the proposed method. Finally, a sample time history of the displacement , momentum of the system (25), and the jump parameter for 3-form case are shown in Figure 3.
The joint probability densities of the displacement and momenta of 2-form system (25) with the transition rates . (a) analytical result; (b) Monte Carlo simulation.
The sample time history of stationary response of 2-form system (25).
Three-form system
In this case, and . The numerical results shown in Figures 4 to 6 are for system with parameters: Three special cases are considered, with
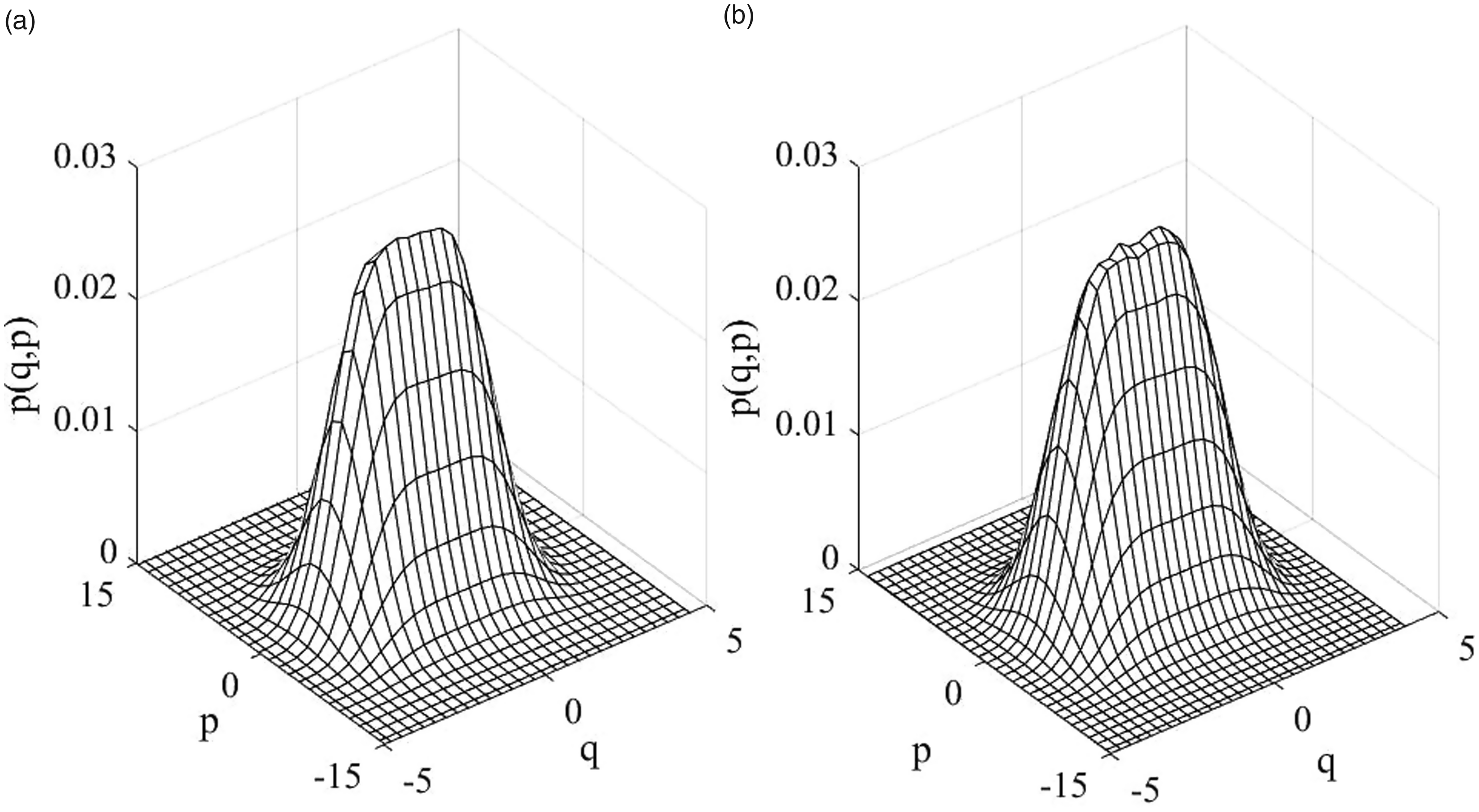
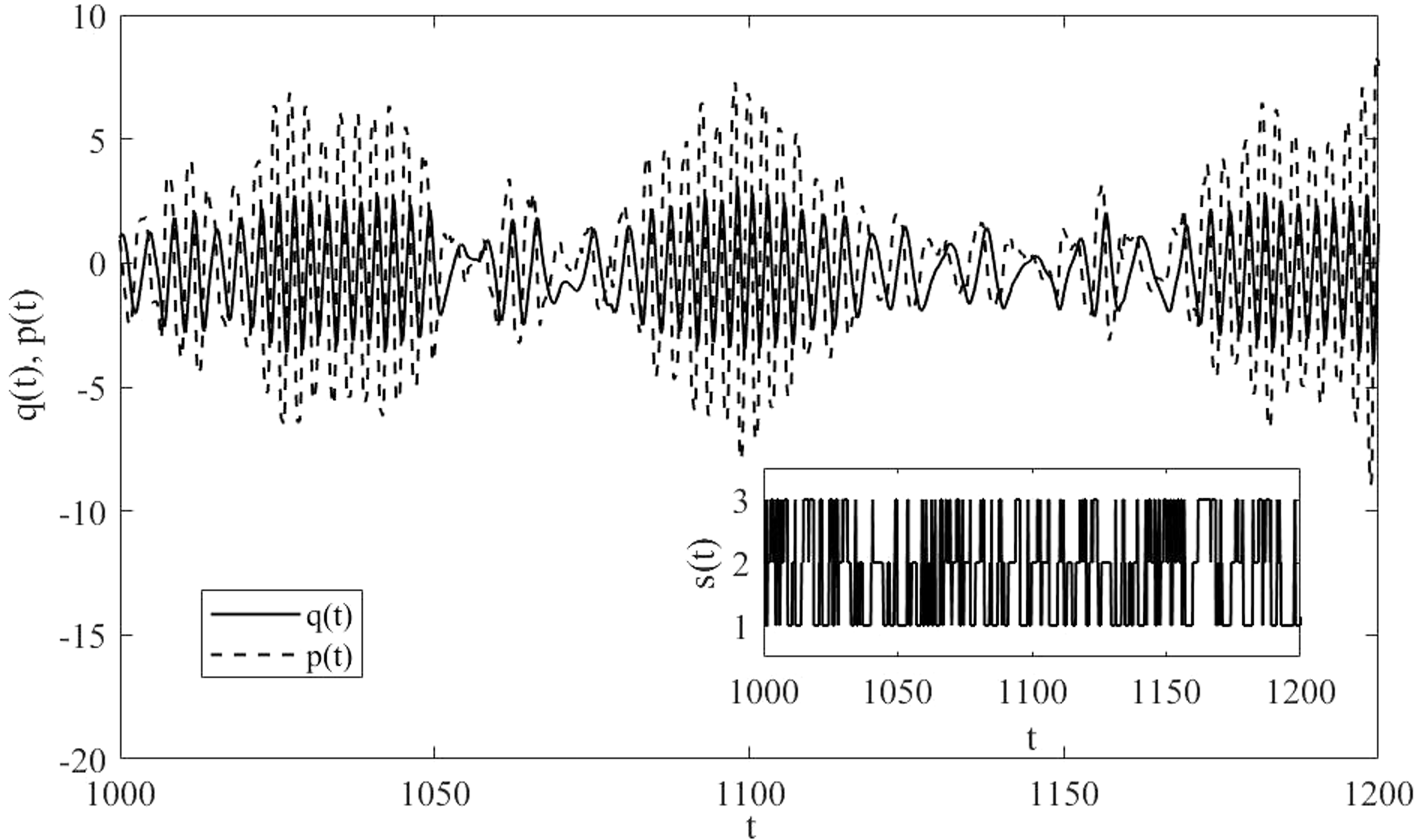
The stationary probability densities of displacement are evaluated and plotted in Figure 4 for different cases. The joint probability densities of the displacement and momenta are exhibited in Figure 5(a) and (b). The analytical results obtained by using equation (32) match closely with those from digital simulation of original system (25), which indicates that the proposed method is very effective for solving vibration problems of Markovian jump nonlinear system under random excitations. Finally, a sample time history of the displacement , momentum of the system (25), and the jump parameter for 3-form case are shown in Figure 6.
The stationary probability density of displacement of 3-form system (25) for , , in equation (32), and when the system is fixed at , and .
The joint probability densities of the displacement and momenta of 3-form system (25) with the transition rates . (a) analytical result; (b) Monte Carlo simulation.
The sample time history of stationary response of 3-form system (25).
Conclusions
In this paper, an approximate method for predicting the stationary response of SDOF nonlinear MJS under wide-band random excitation has been proposed. The original system can be reduced to a one-dimensional Itô equation with Markovian jumps based on the stochastic averaging method. So, the associated stationary FPK equation governing the probability densities of displacements and momenta is resolved. The comparison of the analytical results given by the proposed method with those from digital simulation indicates that the proposed method is a feasible procedure for solving random vibration problem of nonlinear MJS. It is noted that the proposed method has the potential to be extended to the Multi-DOF MJSs.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Natural Science Foundation of China through the grant Nos.11602216, 91648101 and the Basic Research Fund of Northwestern Polytechnical University under Grant No. G2018KY0301.
Appendix 1
References
1.
KrasosvkiiNNLidskiiEA.Analytical design of controllers in systems with random attributes I–III. Automat Remote Control1961;
22: 1021–1025, 1141–1146, 1289–1294.
2.
KatsLKrasosvkiiNN.On the stability of systems with random parameters. J Appl Math Mech1960;
27: 809–823.
FangYWWuYLWangHQ.Optimal control theory of stochastic jump system.
Beijing:
National Defense Industry Press, 2012.
5.
SantillánMQianH.Stochastic thermodynamics across scales: Emergent inter-attractoral discrete Markov jump process and its underlying continuous diffusion. Phys A2013;
392: 123–135.
6.
WuST.The theory of stochastic jump system and its application.
Beijing:
Science Press, 2007.
7.
MaritonM.Almost sure and moment stability of jump linear systems. Syst Control Lett1988;
11: 393–397.
8.
KushnerH.Stochastic stability and control.
New York:
Academic, 1967.
9.
SworderD.Feedback control of a class linear systems with jump parameters. IEEE Trans Automat Contr1969;
14: 9–14.
10.
GhoshMKArapostathisAMarcusSL.Ergodic control of switching diffusions. SIAM J Control Optim1997;
35: 152–198.
11.
FragosoMDHemerlyEM.Optimal control for a class of noisy linear systems with Markovian jumping parameters and quadratic cost. Int J Syst Sci1991;
22: 2553–2561.
12.
JiYDChizeckHJ.Jump linear quadratic Gaussian control in continuous time. IEEE Trans Automat Contr1992;
37: 1884–1892.
13.
LuoJW.Comparison principle and stability of Ito stochastic differential delay equations with Poisson jump and Markovian switching. Nonlinear Anal2006;
64: 253–262.
14.
NatacheSDAVilmaAO.State feedback fuzzy-model-based control for Markovian jump nonlinear systems. Revis Control Autom2004;
15: 279–290.
15.
HuanRHZhuWQMaF, et al.
Stationary response of a class of nonlinear stochastic systems undergoing Markovian jumps. J Appl Mech2015;
82: 051008
16.
HanWPetytM.Geometrically nonlinear vibration analysis of thin, rectangular plates using the hierarchical finite element method—I: the fundamental mode of isotropic plates. Comput Struct1997;
63: 295–308.
17.
RibeiroP.Nonlinear vibrations of simply supported plates by the p-version finite element method. Finite Elem Anal Des2005;
41: 911–924.
18.
ShiYLeeRYYMeiC.Finite element method for nonlinear free vibration of composite plates. AIAA J1997;
35: 159–166.
19.
HeJH.Variational iteration method – a kind of non-linear analytical technique: some examples. Int J Non Linear Mech1999;
34: 699–708.
20.
HeJH.Variational iteration method for autonomous ordinary differential systems. Appl Math Comput2000;
114: 115–123.
21.
HeJH.The homotopy perturbation method for nonlinear oscillators with discontinuities. Appl Math Comput2004;
151: 287–292.
22.
ZhuWQ.Nonlinear stochastic dynamics and control in Hamiltonian formulation. Appl Mech Rev2006;
59: 230–248.
23.
ZhuWQLinYK.Stochastic averaging of energy envelope. ASCE J Eng Mech1991;
117: 1890–1905.
24.
HuRCZhuWQ.Stochastic optimal control of MDOF nonlinear systems under combined harmonic and wide-band noise excitations. Nonlinear Dyn2015;
79: 1115–1129.
25.
WuYJHuanRH.First-passage failure minimization of stochastic Duffing–Rayleigh–Mathieu system. Mech Res Commun2008;
35: 447–453.
26.
HuRCZhuWQ.Stochastic optimal bounded control for MDOF nonlinear systems under combined harmonic and wide-band noise excitations with actuator saturation. Probab Eng Mech2015;
39: 87–95.
27.
HuanRHZhuWQMaF, et al.
Vertical dynamics of a pantograph carbon-strip suspension under stochastic contact-force excitation. Nonlinear Dyn2014;
76: 765–776.
28.
NorrisJR.Markov chains.
Cambridge:
Cambridge University Press, 1998.
29.
TsarkovYFYasinskyVKMalykIV.Stability in impulsive systems with Markov perturbations in averaging scheme. 2. Averaging principle for impulsive Markov systems and stability analysis based on averaged equations. Cybern Syst Anal2011;
47: 44–54.
30.
XuZCheungYK.Averaging method using generalized harmonic functions for strongly nonlinear oscillators. J Sound Vib1994;
174: 563–576.
31.
KhasminskiiRZ.On the averaging principle for Ito stochastic differential equations. Kibernetka1968;
3: 260–279.