
Abstract
Vibration isolation systems based on hybrid electromagnets, consisting of electromagnet and permanent magnet, have a potential usage in many industrial areas, such as clean room design, transportation, semiconductor manufacturing, suspension systems, and robotic surgery due to providing mechanical contact free vibration isolation. Using permanent magnets in the electromagnet structure has some crucial advantages, such as a minimized volume and a more compact structure. Furthermore, the essential force for levitation of vibration isolation stage can be generated by only the permanent magnet(s), which means, by using hybrid electromagnets, magnetic levitation can be achieved with considerably low energy consumption against possible vibrations. This property is called zero-power behavior. However, the main problems of magnetic levitation process are as follows: it has highly nonlinear nature even if it can be linearized; it has unstable pole(s), which makes the system vulnerable in terms of stability. In recent years, linear matrix inequality-based design of controllers has received considerable attention and become very popular due to their ability to satisfy multiobjective design requirements. However, an observer-based H2 controller design for a vibration isolation system having hybrid electromagnets has not been considered yet. Therefore, the linear matrix inequality-based controller is employed to minimize the effect of disturbances on the following objectives, such as vibration isolation, zero-power property, and protection of the levitation gap. The effectiveness of the proposed method is shown with the numerical simulation studies and compared with classical Linear Quadratic Regulator (LQR) approach.
Keywords
Introduction
In the vibration isolation perspective, there are two types of disturbances that have to be considered to design a vibration isolation system.1–3 First type is direct disturbance—it occurs by the force that is directly applied on the vibration isolator stage, and the second type is ground-induced disturbance—it occurs by the vibrations that come from the ground. These disturbances can somehow be handled using passive suspension systems. 4 However, at this point, many performance and sustainability problems arise. The main reason is the existence of an inevitable trade-off, since both the disturbances cannot be rejected at the same time by a simple passive suspension system. If a suspension design is stiff enough to handle direct disturbances, ground disturbance isolation performance of the system decreases. If a suspension design is soft enough to suppress ground disturbances, it is not able to cope with direct disturbances. In the light of above discussions, an active suspension system is needed to achieve satisfactory disturbance attenuation performance.5–7
Most of active suspension systems are required to use high cost actuators and transducers.8,9 Moreover, they are not capable with low energy consumption requirements.4,10 At this point, vibration isolation systems based on hybrid electromagnets have become a good alternative,11–16 because in hybrid electromagnet structure, permanent magnets behave as if they were additional current-source equivalents. Yet, electromagnet and permanent magnet both are highly nonlinear in nature, 17 which means that the whole system may show undesired performance under varying disturbances. The main reason is that disturbances enforce the levitation gap which moves away from its linearization or operating point. Unless the levitation gap is ensured, the system tends to fall down or stick up. Consequently, the performance requirements, such as vibration isolation and zero-power property, cannot be satisfied as well. Therefore, in this study, an observer-based H2 controller is used to deal with multiobjective performance requirements in the presence of disturbances varying at different frequencies.
In the last few decades, linear matrix inequalities (LMIs) have been intensively used as a strong tool in the field of control theory. Many problems, such as H2 and
LMIs have recently been used to address few problems in magnetic levitation, such as disturbance rejection for position control of a simple levitated mass27,28 and gain-scheduling control for a magnetically levitated rotor.
29
However, a detailed study for a vibration isolation system that can both suppress direct and ground disturbances in LMI framework has not been considered so far. In this study, for the controller design, it is aimed to meet multiobjective requirements which can be summarized as follows:
The levitation gap has to be protected. Position of the vibration isolation stage must be least affected by disturbances. The zero-power property has to be provided.
The rest of the study is organized as follows: first, the vibration isolator mechanism dynamics, consisting of hybrid electromagnet dynamics, isolator dynamics, and state-space representation, are introduced. Then, an observer-based H2 controller design with LMIs is given. Finally, the numerical simulation studies are given with the discussions.
Mathematical modeling of vibration isolator mechanism
In this section, state-space representation of the overall system is derived to enable controller design with LMIs. First, dynamics of the hybrid electromagnets are presented. Then, mechanical dynamics of the overall isolator stage are written down by Newton laws. Finally, control-oriented state-space representation which is tailored to design an observer-based H2 controller is given.
Hybrid electromagnet dynamics
In the analysis of a single coil, magnetic resistance, hysteresis of the iron core, eddy currents, flux leakage, and fringing effects are assumed to be negligible. So that, the electromagnetic force for vertical direction is obtained as follows

In Figure 1, highly nonlinear behavior of equation (1) is shown for the system parameters
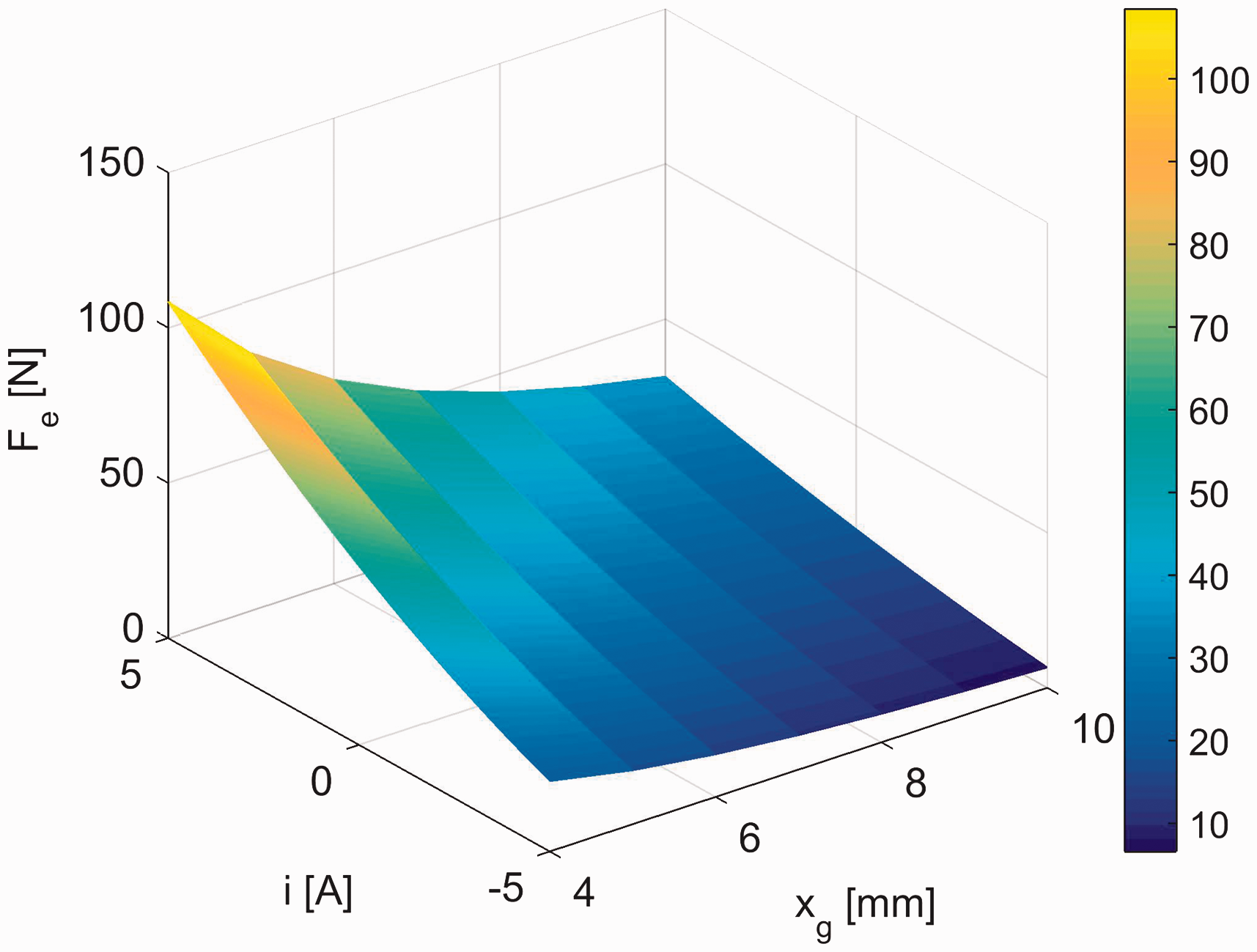
Nonlinear behavior of electromagnetic attraction force on vertical motion.
The levitation gap used in this study is 5 mm, and the zero-power property occurs around 0 A. Therefore, the linearization approach is applied to equation (1) around




Here, m2 is mass of the levitated object, g is the gravitational acceleration constant, and Fd is the disturbance.
Electrical dynamics of the system is given below

Here,
Isolator dynamics
The two mass vibration isolation system combined with a hybrid electromagnet in Figure 2 was first proposed by Mizuno et al.13 Here, x0 is the ground disturbance displacement, x1 is the position of middle mass and x2 is the position of the isolation stage, and xg is the levitation gap

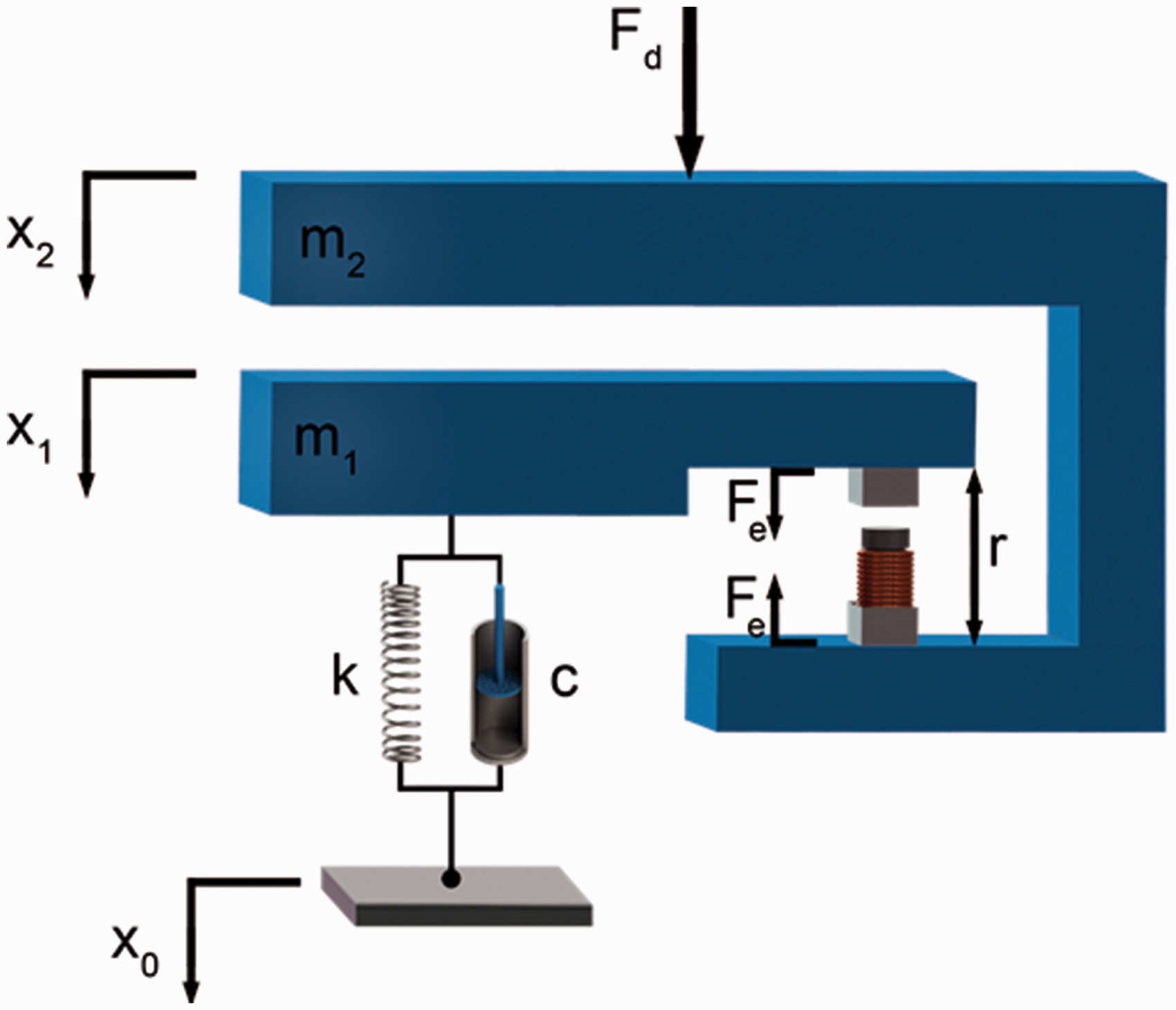
Two mass vibration isolation system.
Here,

Here, m2 is mass of the levitated object, g is the gravitational acceleration constant, and Fd is the disturbance;
Electrical dynamics of the system is given below

Control-oriented state-space model
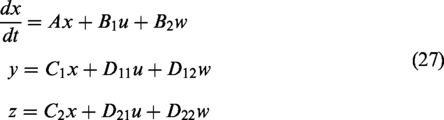
Any linear time invariant system can be represented by a state-space framework as given below

Here,



In order to rewrite the vibration isolator dynamics in state-space representation, state vector

Here, r is the reference trajectory which is desired to be tracked by

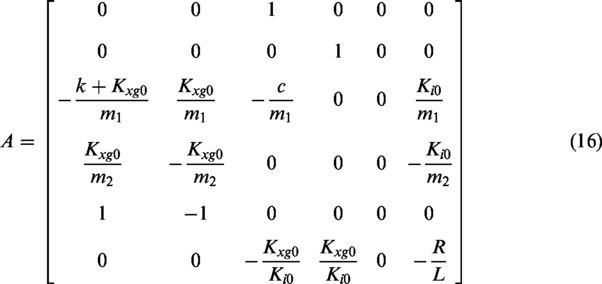
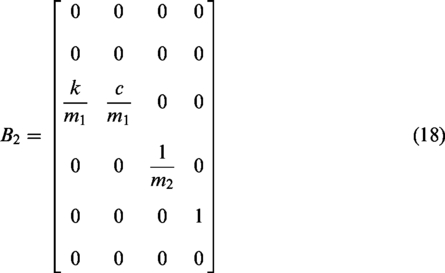
By the use of equations (10) to (15), the state-space matrices are in the form of

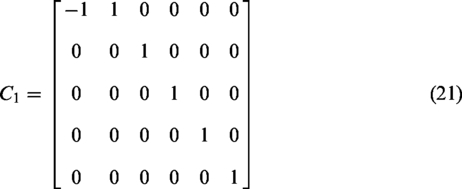
In order to design an observer-based controller, measured outputs vector has to be defined according to practically available sensors and transducers. Measured output vector is the linear function of state and input variables as follows

Here,

Then to construct a measured output (20), the following matrices are needed to be selected as

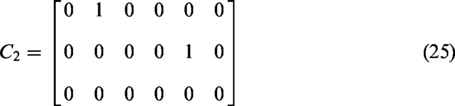
In the controller design, effect of the exogenous inputs on some certain output variables is required to be minimized. The certain output variables are named as controlled outputs and shown as

Here,

Then to construct a controlled outputs vector in the form of equation (24), the controlled output matrices are needed to be selected as

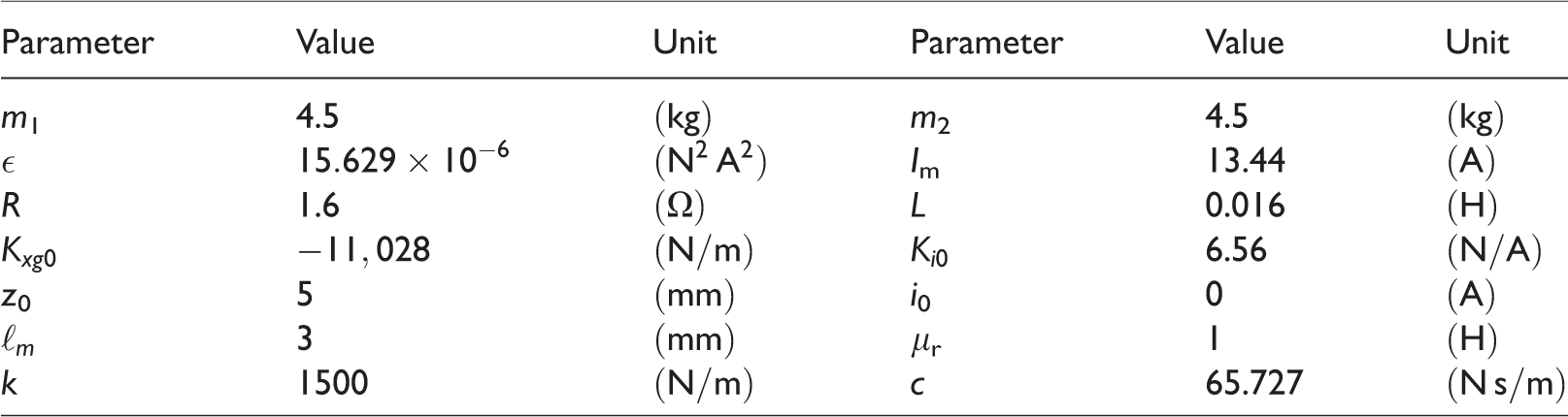
Finally, the physical parameters used throughout the study are given in Table 1.
Physical parameter values.
Observer-based H2 controller design
In this paper, to provide an active vibration isolation, an observer-based H2 controller design via LMIs framework has been employed. Based on the overall system model, an H2 full-state feedback controller could be designed alone. However, all the state variables belonging to the vibration isolator are not available for feedback. Despite the fact that noncontact electromagnetic and/or laser-based transducers can be used to sense relative position in the presence of fixed reference frame, absolute positions are not accessible due to absence of fixed reference frame. Therefore, an observer-based control strategy which uses estimated states rather than actual ones has been used to achieve optimal vibration isolation in terms of H2 norm performance index.
Problem formulation
Consider an open-loop state-space system given by equation (27)
An observer-based control law can be written as equation (28)
Here, 
Here, 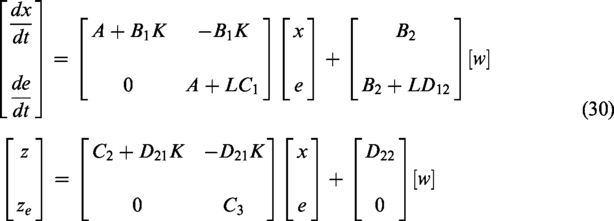
The main objective is designing an observer-based control law, such that following conditions hold:
The closed-loop system (30) is stable which ensures the stability of the open-loop system (27) and the error dynamics equation (29) simultaneously. In order to ensure a finite value of H2 norm, D22 is
H2 state feedback controller design
In this section, first it is assumed that all the state variables are available for feedback. Thus, the state feedback control law is given by equation (31)

Then, by substituting the state feedback control law (31) into the open-loop system (27) under the assumption of full-state feedback, the resulted closed-loop system
The closed-loop system (32) is asymptotically stable which indicates that all eigenvalues of Vibration isolation performance is maximized by minimizing the H2 norm between exogenous input w and the controlled outputs z. Closed-loop poles are located to the left side of Closed-loop poles are located to the right side of 
Then, the following theorem presents a full-state feedback H2 controller design.
minγ; s.t.equations (33) to (37)





Then, the control law
H2 observer design
In this section, LMI-based design of a full-order observer is presented. For an H2 observer design problem, the main requirements can be stated as follows:
Making the observation error dynamics (29) asymptotically stable which means that all eigenvalues of Keeping the H2 norm between ze and w as small as possible. Closed-loop poles are located to the left side of Closed-loop poles are located to the right side of
The following theorem formulates the H2 observer design problem.
minγ; s.t.equations (38) to (42)





Then,
Construction of the observer-based controller
In this section, the state feedback controller and the full-order observer are designed. To compute the state feedback controller positive scalars αc is chosen to be 5 and βc is chosen to be 200. Then by using the YALMIP parser
24
and SeDuMi solver,
25
the H2 full-state feedback controller gain can be computed with Theorem 1 as follows

Then, the resulting closed-loop pole placements are given by the following equation

It is apparently seen that closed-loop poles are successfully located at the desired strip region in complex plane. Thereafter, to compute the full-order observer positive scalars, α0 is chosen to be 250 and β0 is chosen to be 1500. In addition, all the observation error variables are equally weighted by taking. Then, by using the YALMIP parser
24
and SeDuMi solver,
25
the H2 observer gain can be computed with Theorem 2 as follows
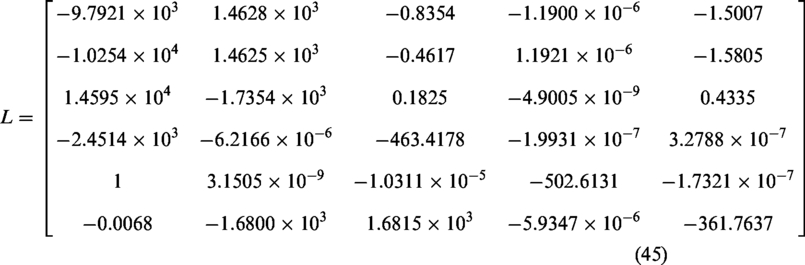
Then, the resulting closed-loop pole placements are given by the following equation

It is apparently seen that closed-loop poles are successfully located at the desired strip region in complex plane. The eigenvalues of the state feedback controller and observer can be seen in Figure 3.
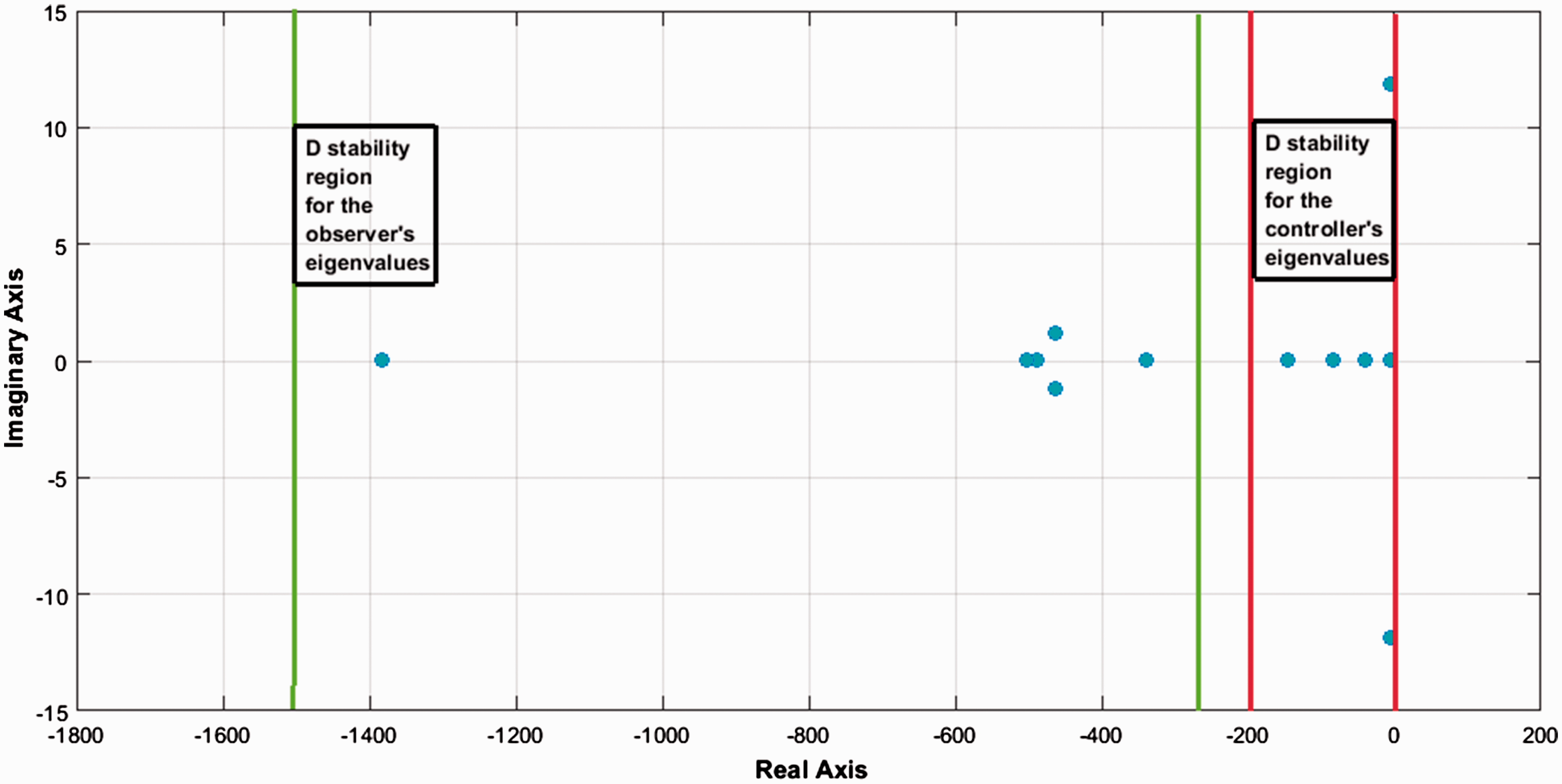
The observer eigenvalues and the controller eigenvalues on different D stability regions.
Note that stability of the closed-loop system is guaranteed since the diagonal entries of the Acl in equation (30) are composed of
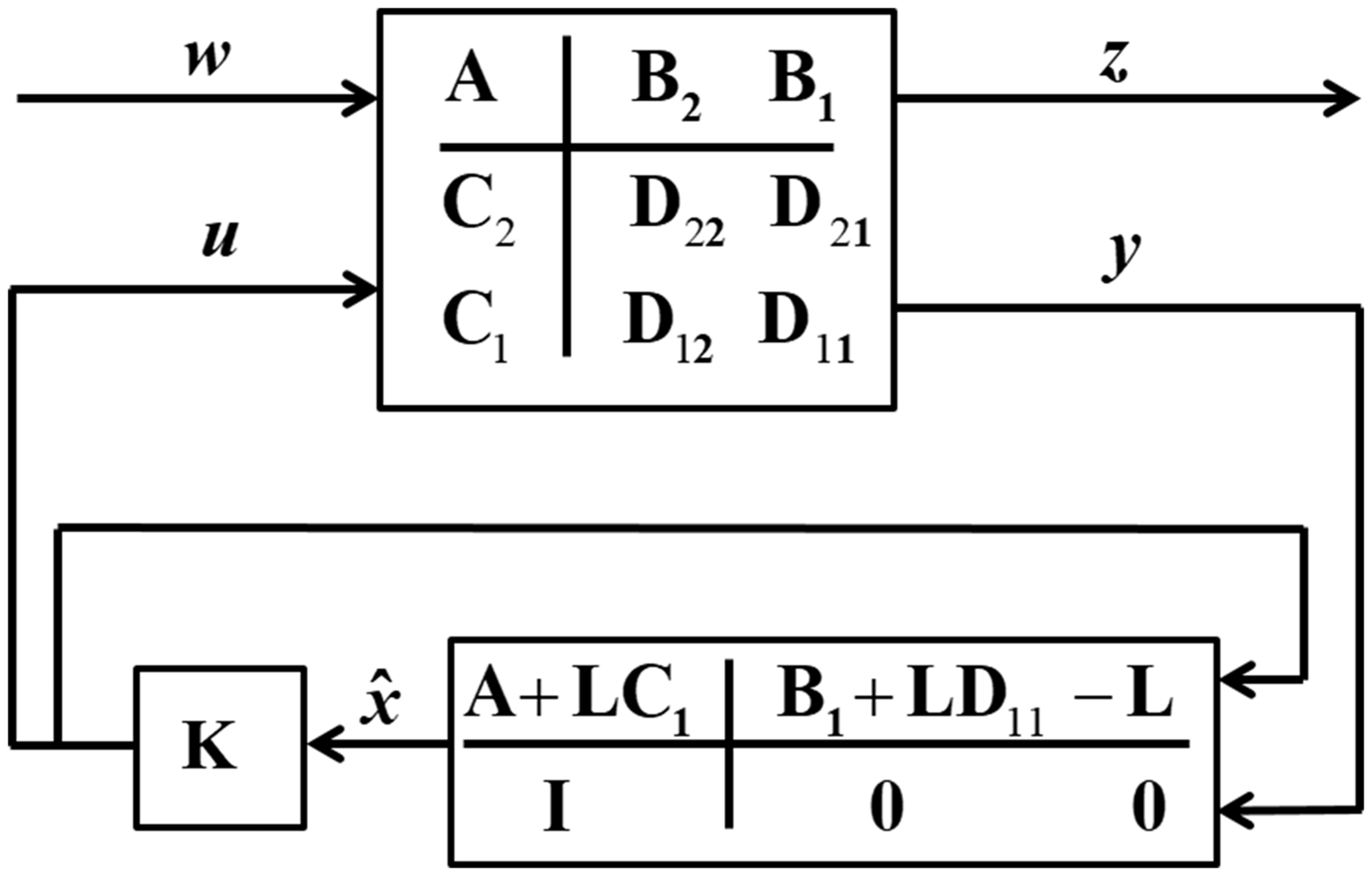
Observer-based control scheme.
To validate and compare the performance of proposed observer-based controller with classical LQR controller, the design equations for a LQR controller can be obtained as in Theorem 3.



The performance weighting matrices of the LQR controller are selected as

Then, the resulting LQR controller gain is given by equation (51)

Simulation results and discussions
In this section, the proposed vibration isolation system is numerically tested for static and dynamic disturbances. First, vibrations of the isolation stage, air gap, and current variations under static and dynamic disturbances are analyzed in time domain. Thereafter, bode plots are given to investigate system responses under more generalized disturbance scenarios.
In the static disturbance case, direct disturbance Fd is chosen as 5 N stepwise input app. Reference value
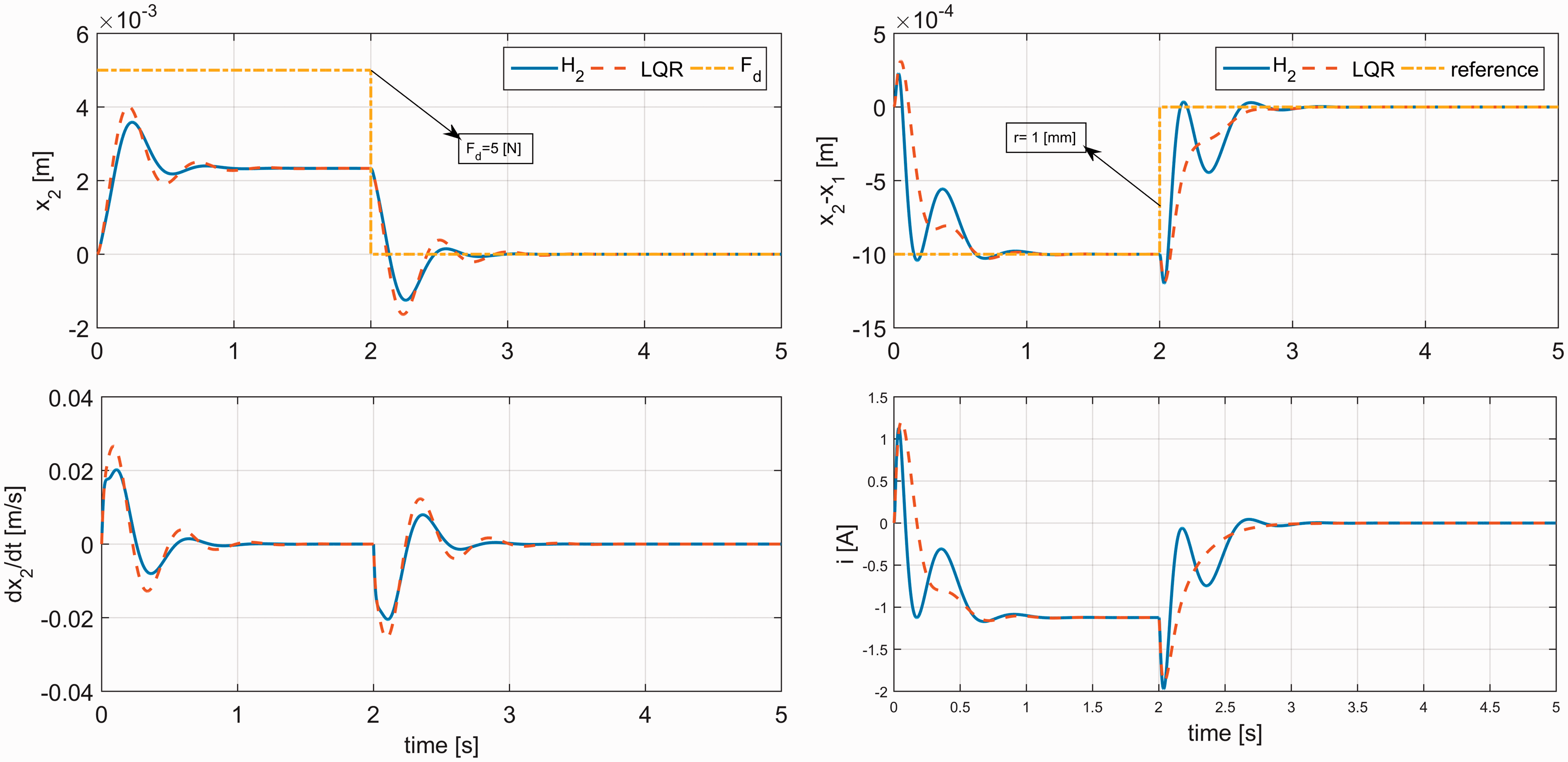
Isolator responses under stepwise direct disturbance and levitation gap reference tracking requirements at the same time.
As can be seen from Figure 5, both controllers provide zero-power property after the disturbances disappeared. However, proposed H2 controller has better vibration isolation performance, since less overshoot is obtained in both
In order to investigate vibration isolation performance under dynamic loading case, ground displacement x0 is taken as
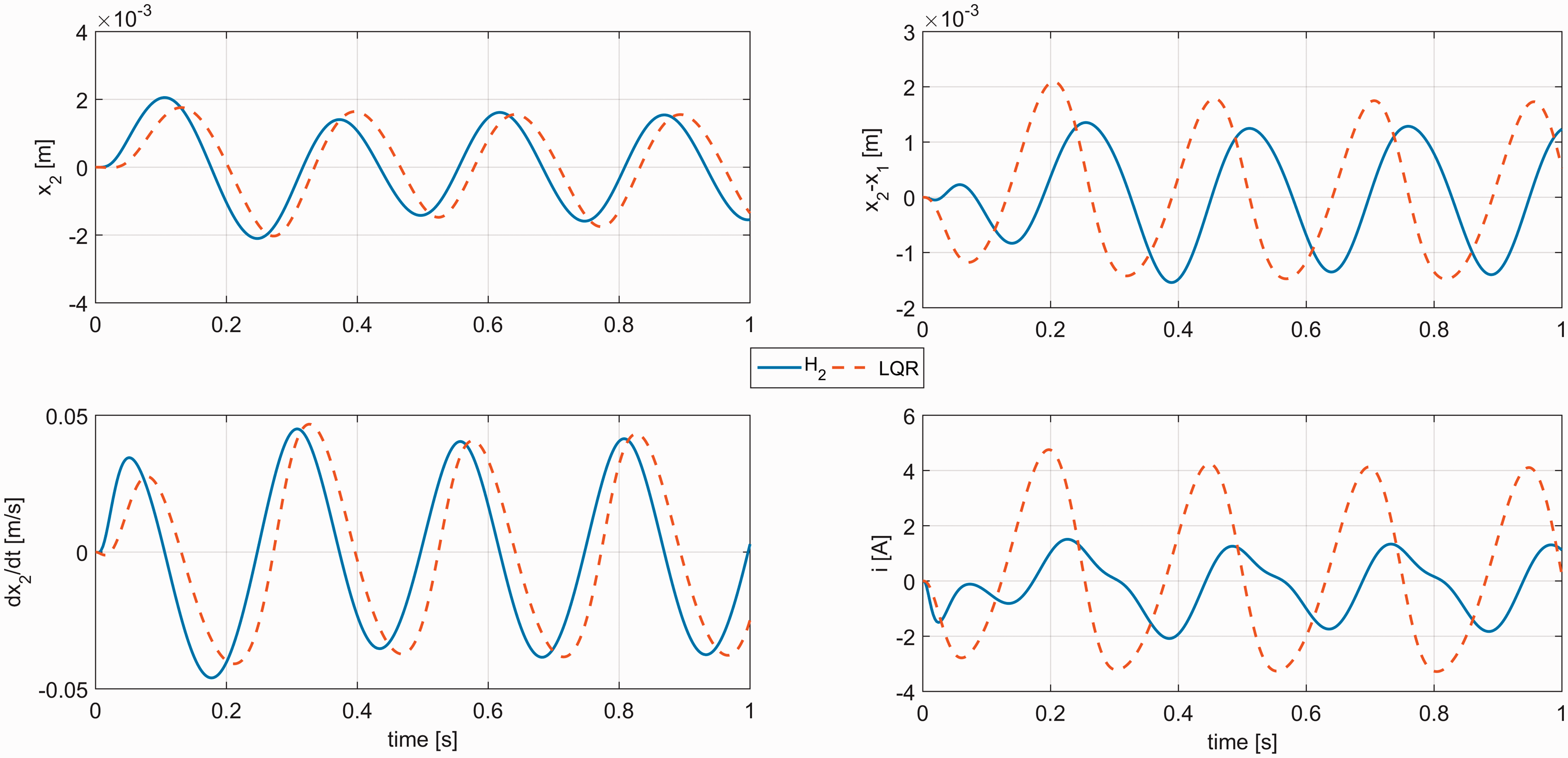
Isolator responses under ground disturbance of
Figure 6 indicates that both controllers have more than 50% suppression rate on ground displacement disturbances even in the simultaneous excitation of direct disturbances. Despite the fact that both controllers provide nearly identical isolation performance, H2 controller has significantly superior responses on levitation gap and coil current. To investigate the performance under the direct disturbances of 1–5 N interval with the
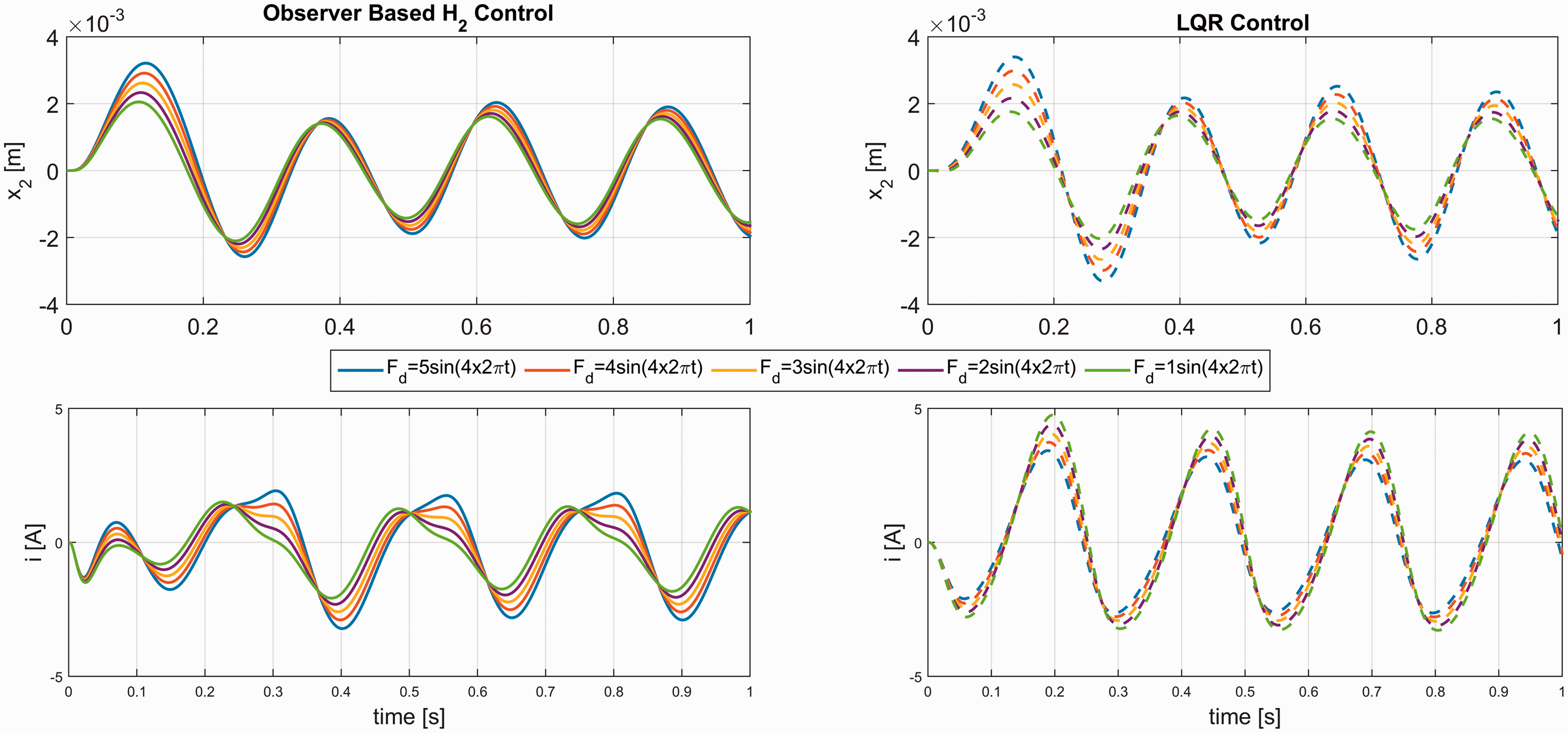
Isolator responses under ground disturbance of
As can be seen in Figure 7, LQR controller requires much higher control effort in terms of current coil response. In Figure 8, effect of the disturbances on the isolation stage vibrations and current can be seen for the entire frequency domain. Effect of the ground disturbances and direct disturbances is considerably attenuated above 2 Hz. It is well known that realistic disturbances are usually composed of sine wave components much faster than 2 Hz. Therefore, the proposed system has quite satisfactory isolation performance with very low power consumption and safely operated levitation gap, on the frequency range of interest due to the practical considerations.
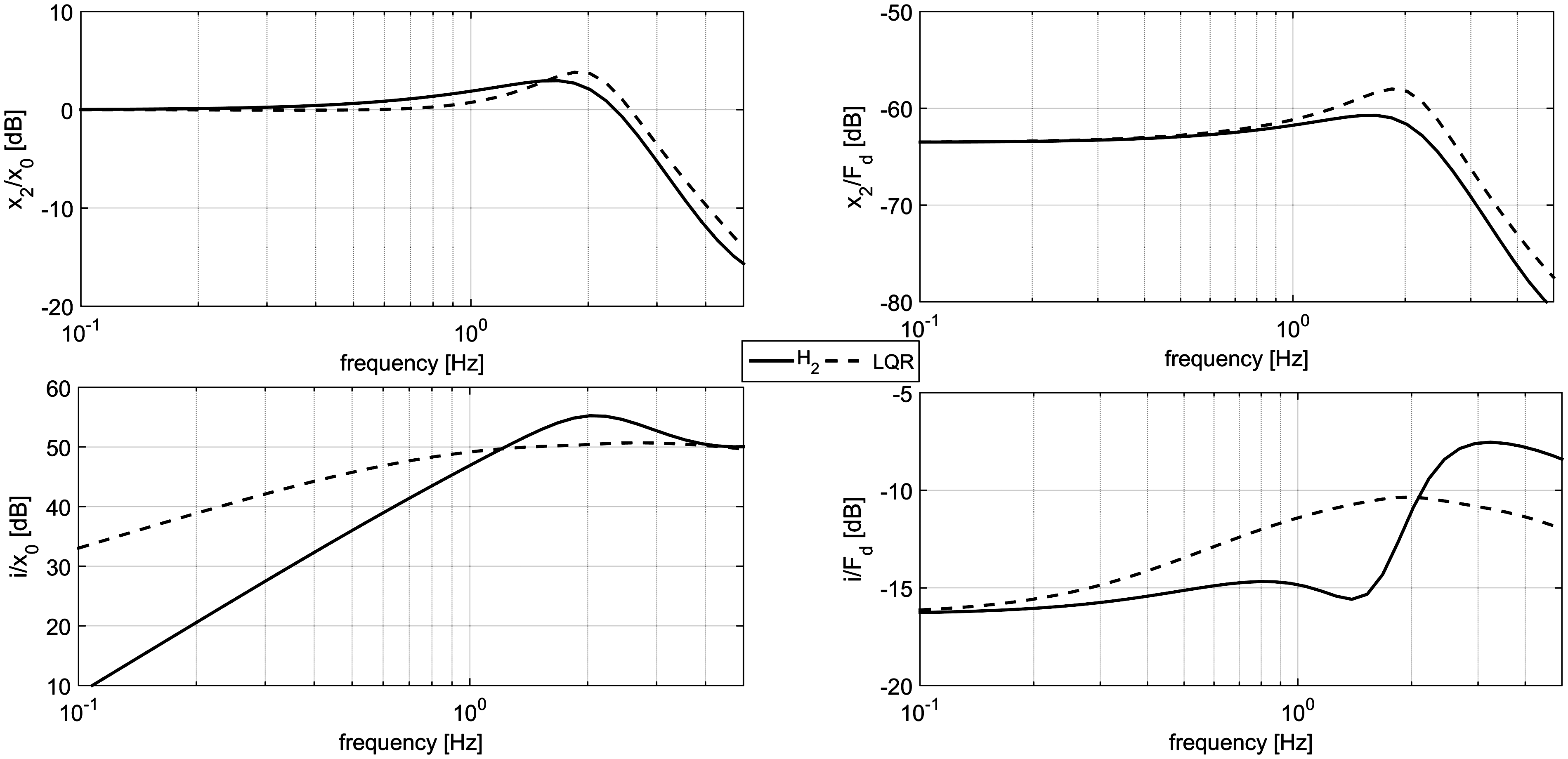
Bode plots for mass-2 vibrations and levitation gap.
Robust stability analysis
In this subsection, robust stability of the proposed observer-based H2 controller and classical LQR controller is analyzed.
For magnetic levitation applications, levitated object’s mass is the most important parameter due to its variable value in different scenarios. Therefore, robust stability analysis is conducted for m2 values in the range of 1.5–7.5 kg.
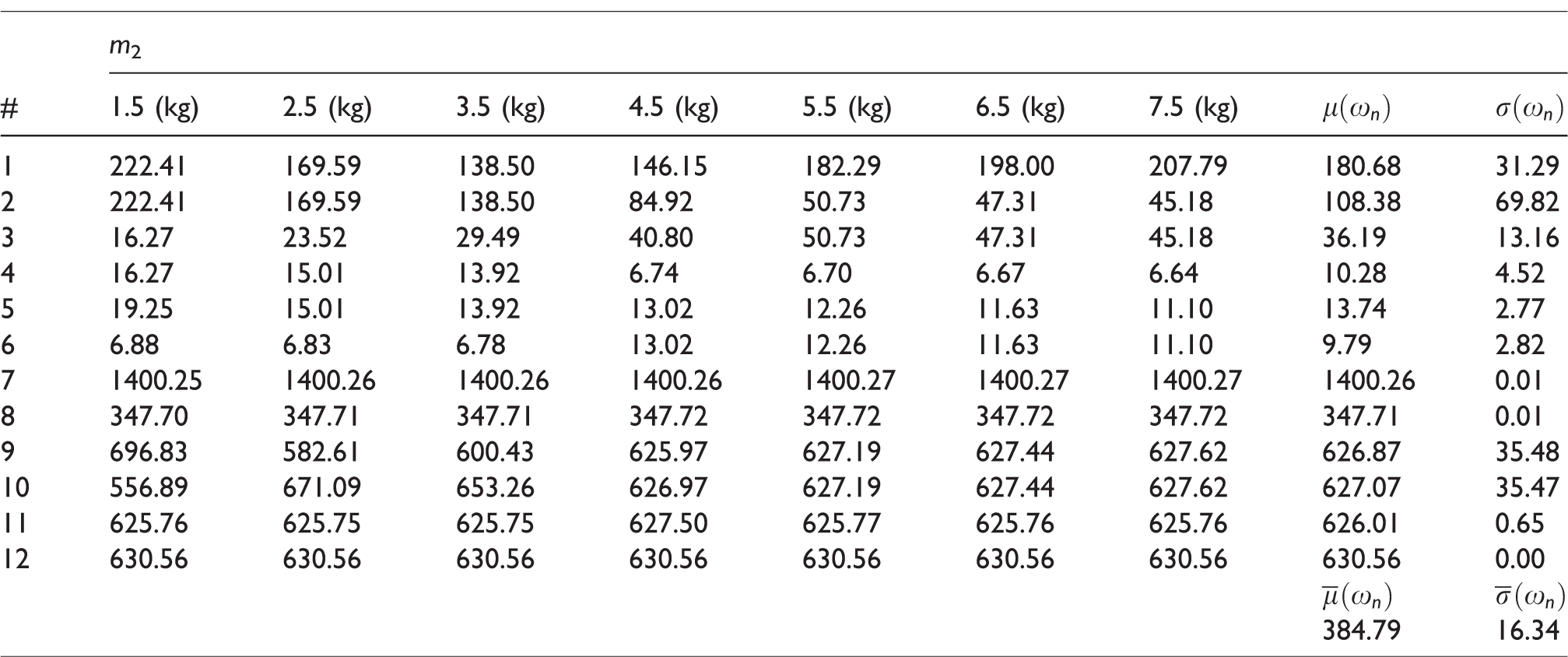
In Tables 2 and 3, natural frequencies, ωn, are given for the closed-loop systems with observer-based controller and classical LQR controller. Moreover, arithmetic means and standard deviations are listed to quantitatively describe ωn variations against different m2 values. Here, μ denotes arithmetic mean and σ denotes standard deviation.
Natural frequencies, ωn (rad/s), for the closed-loop system with observer-based controller.
Natural frequencies, ωn (rad/s), for the closed-loop system with classical LQR controller.
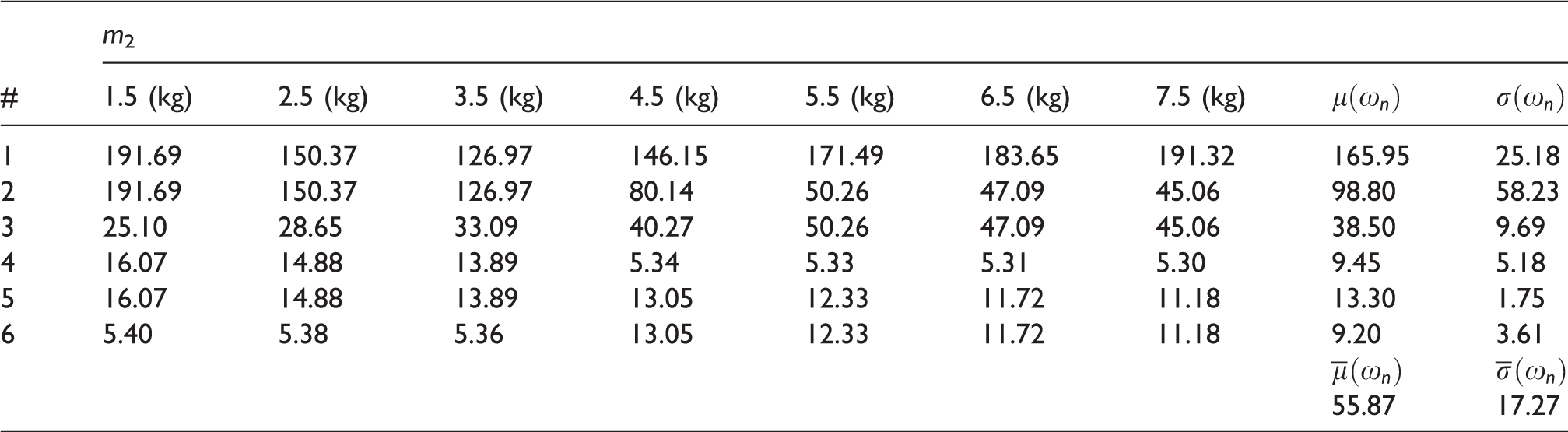
As expected, the closed-loop system with observer-based controller is 12th-order system, while the closed-loop system with classical LQR controller is sixth-order system. Therefore, the closed-loop system with observer-based controller has 12 natural frequencies and 12 damping ratios, while the closed-loop system with classical LQR controller has 6 natural frequencies and 6 damping ratios.
As can be observed from Tables 2 and 3, average standard deviation of natural frequencies,
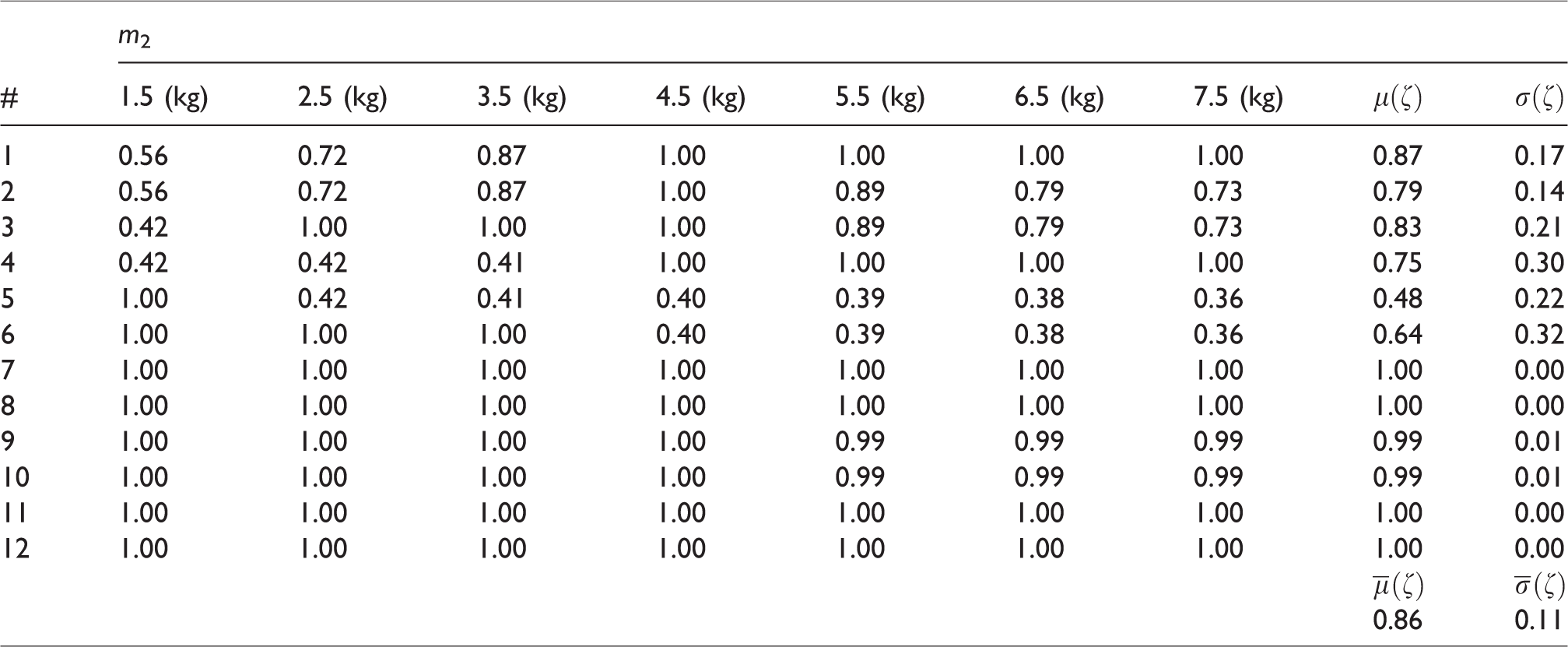
In Tables 4 and 5, damping ratios, ζ, are given for the closed-loop systems with observer-based controller and classical LQR controller. Moreover, arithmetic means and standard deviations are listed to quantitatively describe ζ variations against different m2 values.
Damping ratio, ζ, for the closed-loop system with observer-based controller.
Damping ratio, ζ, for the closed-loop system with classical LQR controller.
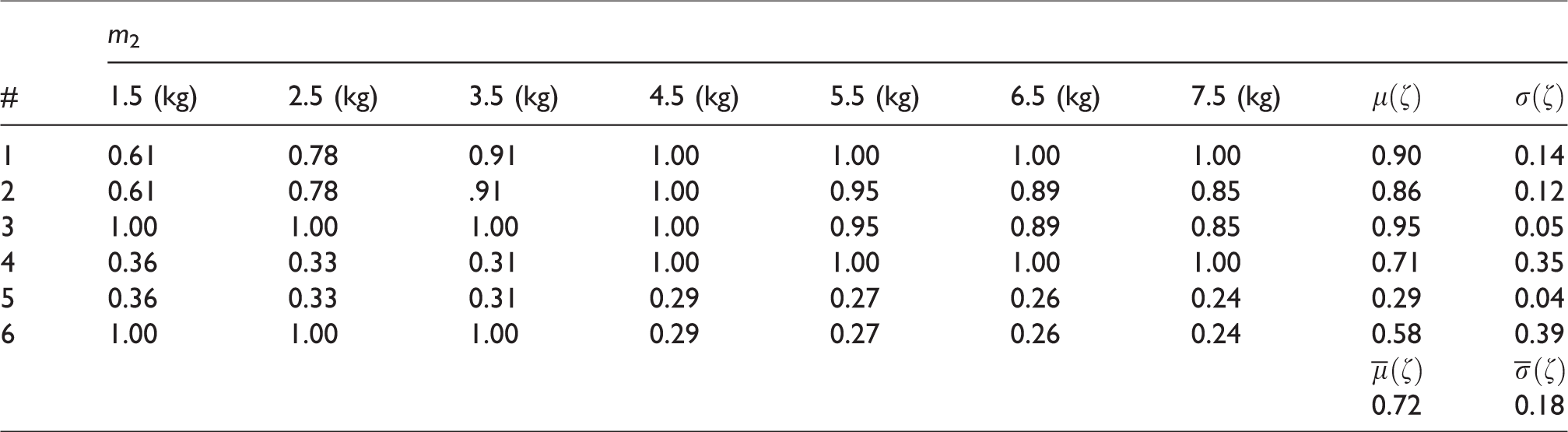
As can be observed from Tables 4 and 5, average standard deviation of damping ratios,
In order to investigate effect of parameter variations in frequency domain, bode plots are given in Figure 9. In terms of vibration isolation performance, the proposed controller has smaller gains for entire values of m2. As previously mentioned by damping ratio comparisons, classical LQR controller has weaker damping property for whole m2 values.
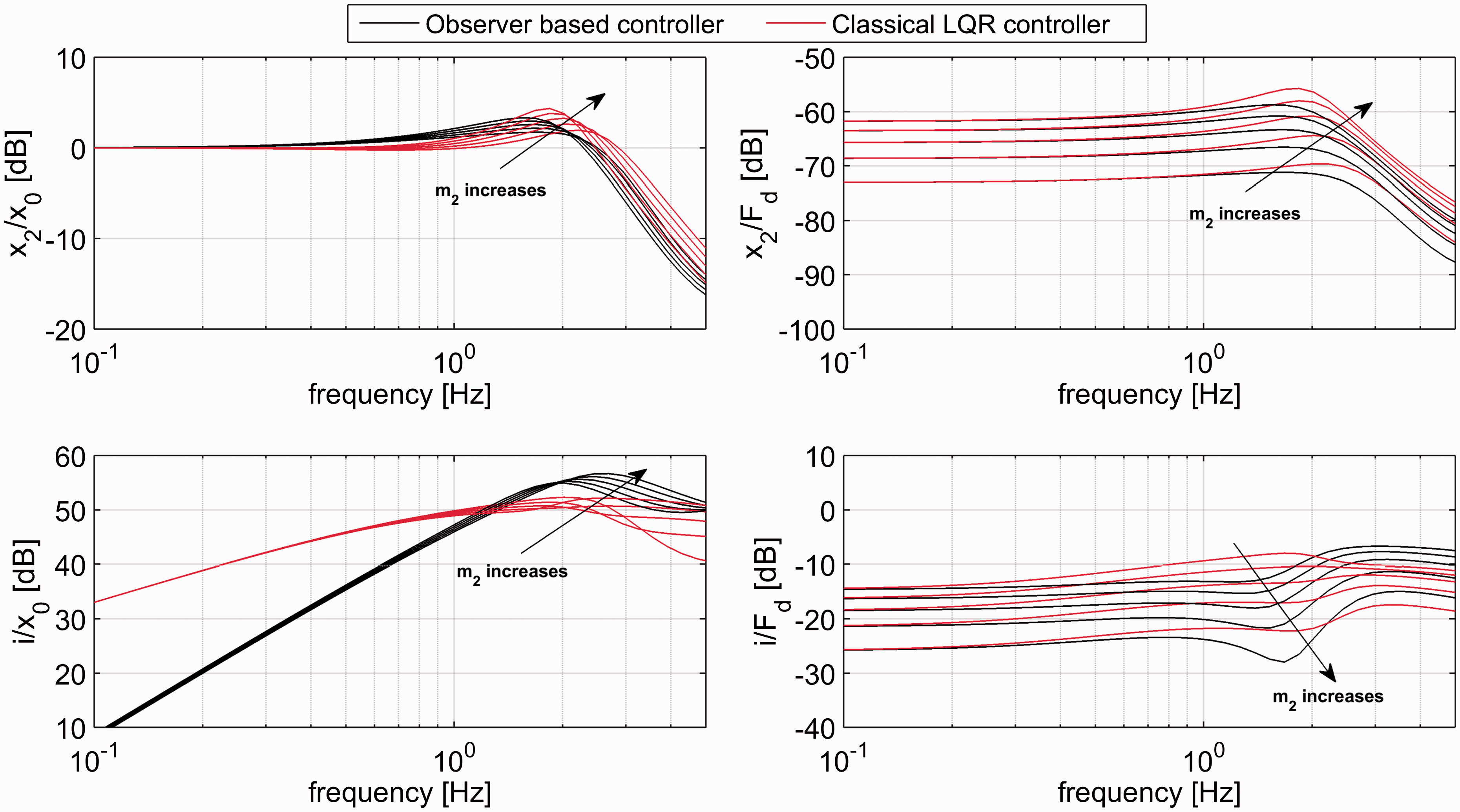
Frequency responses under variation of m2.
Conclusions
This paper has provided an application of a multiobjective observer-based H2 controller on vibration isolation system having hybrid electromagnets. By the use of an LMI-based design approach, vibration isolation, zero power, and levitation gap protection have been simultaneously achieved under both ground and direct disturbances for static and dynamic loading conditions. Robust performance and robust stability of the specified controller on the proposed isolator configuration has been investigated in both time and frequency domain against a classical LQR controller. It has been revealed that the isolator having H2 controller is capable of mitigating the vibrations caused by both ground displacement and direct disturbances on the frequency range of interest with smaller energy consumption level. Moreover, practical limitations on the levitation gap have not been violated for extensive class of disturbances.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by The Scientific and Technological Research Council of Turkey (TUBITAK) under the Grant Number 112M210 and by Research Fund of the Yildiz Technical University under the Project Number FDK-2018-3250.