
Abstract
The main task of this paper is to put forward a vibration absorption method for attenuating nonlinear vibration of the flexible manipulator based on modal interaction. A vibration absorber is suggested to establish the 1:1 internal resonance state with the flexible manipulator, thereby transferring the vibration energy from the flexible manipulator to the vibration absorber. In the presence of damping, the vibration energy of the flexible manipulator can be effectively dissipated by the vibration absorber. Since this method puts an emphasis on constructing an internal energy transfer channel between the flexible manipulator and the vibration absorber rather than directly responding to external excitations, it is particularly convenient to reduce nonlinear vibration induced by unknown external excitations. Numerical simulations and virtual prototyping simulations have verified this method’s feasibility.
Introduction
In the past years, mainly because of space applications, robotic manipulators with flexible members have attracted great attention. Typically, these flexible manipulators possess low structural damping and small stiffness, and thus any disturbances may cause serious control issues or structural damage. Therefore, a great deal of research has been conducted on designing vibration control schemes to deal with these problems.
Generally, the vibration response can be reduced by enhancing the structural stiffness or increasing the fundamental frequencies. Another useful way is to tailor the frequency response of a vibrating structure by attaching additional masses or oscillators. Through optimizing the distributions of the dynamic properties in an array of additional masses, ribs or subordinate oscillators, the desired frequency response can be precisely obtained.1–3
In addition to passive control methods, a large number of active control methods have been developed to damp out transient vibration, including: PID control, computed torque control, adaptive control, robust control, neural network control, input shaping, sliding mode control, variable structure control, fuzzy control, and so on.4–9 Moreover, various actuators based on smart materials, like piezoelectric ceramic and shape memory alloy, have also been investigated.10–12 Nevertheless, they are probably faced with severe challenges when dealing with vibration problems with strong energy. Since these methods rely on external energy to suppress vibration, it is difficult for most of the smart material actuators to conquer strong vibration due to limited energy output. Besides, since strong energy always excites large amplitude, a number of nonlinear terms become significant and cannot be ignored any more. Therefore, any control methods based on linearized models will become invalid.
In addition to vibration suppression methods, vibration absorption methods are other useful ways to control vibration. Rather than suppressing vibration with the help of external energy, they absorb vibration of the primary system via vibration absorbers. Since these methods do not need much energy, and thus are suitable for reducing strong vibration with large amplitude. However, only after detailed information of external excitations has been obtained, can most of them effectively neutralize vibration responses of the primary system. As a result, if external excitations are unclear or unpredictable, such as in the outer space, these methods will deteriorate.
In fact, it is a valuable way to resort to appropriate nonlinear theory for nonlinear vibration control. For a multi-degree-of-freedom nonlinear vibrating system, it is found that vibration energy of one mode can be transferred via internal resonance to another mode which is commensurable with the former. 13 Golnaraghi 14 and Golnaraghi et al. 15 firstly attempt to use internal resonance to control structural vibration of a flexible cantilever beam. Afterwards, Tuer et al.16,17 and Oueini et al. 18 and Oueini and Golnaraghi 19 have conducted theoretical and experimental studies and regulated the motion of a similar beam. However, their flexible cantilever beam model was a rigid beam connected by a torsional spring. Obviously, this simplified model is not feasible to the flexible manipulator. Recently, the above studies have been extended to the distributed flexible beam.20,21 But their models belonged to the flexible structure without rigid motion and did not involve the flexible manipulator undergoing large scale joint motion. Furthermore, their flexible structure is assumed as a linear vibration model for the simplicity, while the flexible manipulator itself is a nonlinear dynamics system. Obviously, the latter is much more complicated than the former.
The main task of this paper is to put forward a vibration absorption method for attenuating nonlinear vibration of the flexible manipulator based on the internal resonance. The paper is composed of six sections. Following the introduction, the next section suggests a vibration absorber and creates a nonlinear dynamics model for the flexible manipulator based on Kane’s method. Then, the method of multiple scales is used to investigate vibration response of the nonlinear dynamics equations. In the subsequent section, a 1:1 internal resonance method is analyzed for two cases: undamped and damped. It is proven that the internal resonance can be successfully established between the flexible manipulator and the vibration absorber, and the vibration energy of the flexible manipulator can be transferred to the vibration absorber and then dissipated by the damping of the latter. Numerical simulations and virtual prototyping simulations are then conducted to verify theoretical analyses. Finally, the last section provides the conclusions.
Formulation of nonlinear dynamics model
In this paper, a three-link manipulator is researched, in which the first two links (Link 1 and Link 2) are rigid and the third link (Link 3) is flexible, but three joints (Joint 1, Joint 2 and Joint 3) are rigid, as shown in Figure 1. Link 3 is viewed as a uniform Bernoulli beam with the rectangle cross-section of height
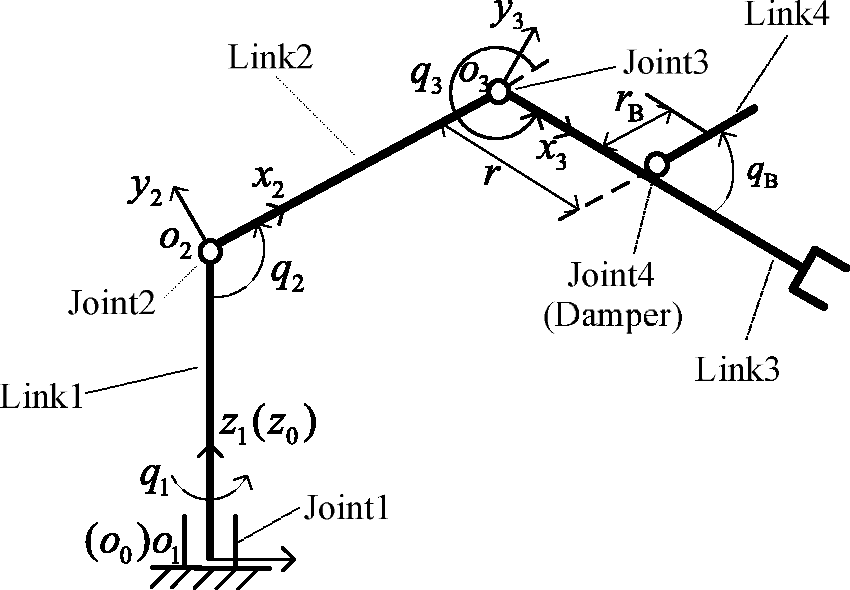
Model of a flexible manipulator with a vibration absorber.
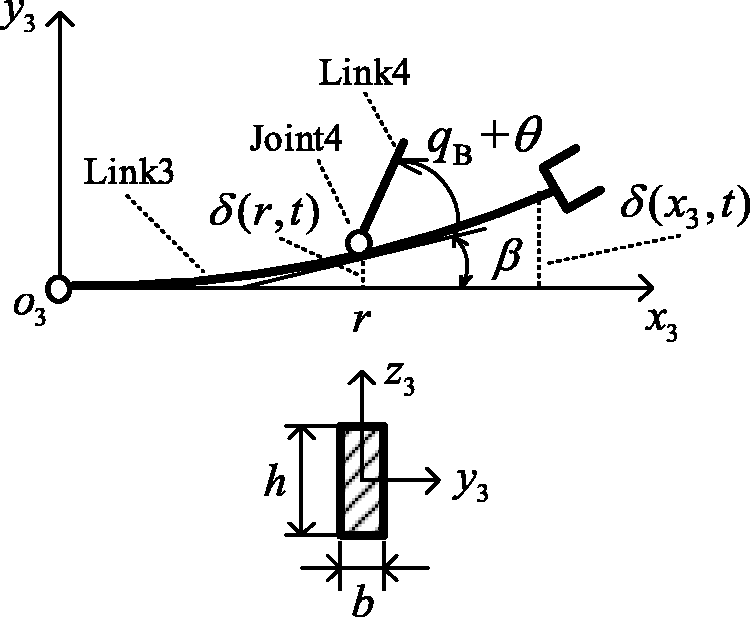
Description of deformation.
To reduce vibration of the flexible manipulator, another vibrating system, used as a vibration absorber, is attached to the flexible manipulator at


Based on Kane’s method, the dynamics equation of the flexible manipulator and vibration absorber is derived and can be written as
22

Equation (3) can be separated into two equations describing the dynamics of


Equation (5) exhibits flexible dynamic behavior of both the flexible manipulator and vibration absorber, playing an important role in vibration control. By exploring nonlinear coupling between the flexible manipulator and vibration absorber in this equation, the internal resonance is expected to be established and used to reduce vibration.
According to the vibration theory, the transverse displacement of Link 3 can be expressed in terms of the mode shapes

In this study, only the fundamental mode of the Link 3 is considered due to its dominant contribution to the vibration response in common cases. By considering equations (1), (2) and (6), the flexible dynamics equations about the fundamental mode coordinates


And the detailed descriptions of above parameters are listed in Appendix 1.
In equations (7) and (8), it is seen that these two modal coordinates
In the following sections, modal interaction effects between the fundamental mode of the flexible manipulator and the vibration mode of the vibration absorber will be investigated.
Nonlinear analysis
Perturbation equation
Since there are no closed-form solutions to equations (7) and (8), an approximate analytical solution is generated using perturbation analysis. A small non-dimensional bookkeeping parameter


The method of multiple scales is used to determine a first-order approximation to the solutions of equations (9) and (10) in the form



In terms of


Substituting equations (11), (12), (14), (15) into equations (9) and (10) and equating coefficients of the same order of
Order (


Order (


Equations (16) to (19) are time-varying, because
Perturbation solution
The linear problem is governed by equations (16) and (17). As mentioned above, these two equations are solved within the k-th time subinterval


The nonlinear problem is governed by equations (18) and (19). Similarly, these two equations are solved within the k-th time subinterval


Substituting equations (22) and (23) into equations (18) and (19), the following equations in


To obtain the solutions of equations (24) and (25), it is necessary to determine the solvability conditions by eliminating the secular terms.
Analysis in internal resonance
In this section, we will study the responses of the system at the 1:1 internal resonance condition, i.e.
Resonant case, without damping
In the case of the 1:1 internal resonance, a detuning parameter

In the absence of damping (i.e.


Separating real and imaginary parts, one obtains





Multiplying equation (29) by

Adding the resulting equations and integrating, one obtains

Since the effect of damping is not taken into account, the system is conservative and the energy level remains constant. Because
Resonant case, with damping
In the presence of the damping (i.e.


Separating real and imaginary parts, one obtains


By numerical integrations of equations (31) to (33) and (38) and (39), it is shown that, in the presence of damping, the vibration energy is continually exchanged between the flexible manipulator and the vibration absorber, and dissipated by the damping of the vibration absorber.
Discussions about the proposed internal resonant absorber
Internal resonance is an important nonlinear principle, by which two coupled vibration modes can exchange the vibration energy with each other. Therefore, an internal resonant absorber is proposed in this paper to provide a vibration mode used to establish the internal resonance with the controlled mode of the flexible manipulator. Once the internal resonance has been established, the vibration energy can be transferred from the controlled mode to the vibration mode provided by the vibration absorber, then dissipated by the damping of the vibration absorber.
To this end, two conditions should be satisfied. The first condition is the frequency relationship between the vibration absorber and the flexible manipulator. To establish the internal resonance between two vibration modes, their frequency relationship must be commensurable or nearly commensurable. Therefore, the frequency of the vibration absorber in this study should be equal to the controlled mode frequency of the flexible manipulator. The second condition is
In addition, appropriate damping of the vibration absorber is an important parameter for energy absorption. If the damping is excessive small, the vibration energy cannot be sufficiently absorbed by the vibration absorber. However, if the damping is excessive large, it will block the transfer of the vibration energy from the flexible manipulator to the vibration absorber. Therefore, appropriate damping of the vibration absorber should be obtained with the help of the relevant experiments. Besides, the position of the vibration absorber is an important parameter for enhancing energy absorption. Since the internal resonance relies on the nonlinear coupling, the vibration absorber should be mounted on the appropriate position where nonlinear coupling terms are strong. This can be implemented by optimizing the position of the vibration absorber.
Simulation and analysis
To verify the above theoretical study, a three-link manipulator with last link flexible is researched in numerical simulations, as shown in Figures 1 and 2. The parameters of the links are given as follows: each of the first two links is made of steel, which length is 0.4 m, the square cross-section of side length is 0.05 m. The third link is made of aluminum with elastic modulus 71 GPa and mass density 2710 kg/m3. Its length is 0.8 m, the rectangle cross-section of height
Suppose the desired joint motion of the manipulator is

If the flexible manipulator is not equipped with the vibration absorber, its end-effector response is obtained when moving according to equation (40), as shown in Figure 3. Given the initial disturbance of 20 mm, its vibration response attenuates very slowly due to small structural damping.
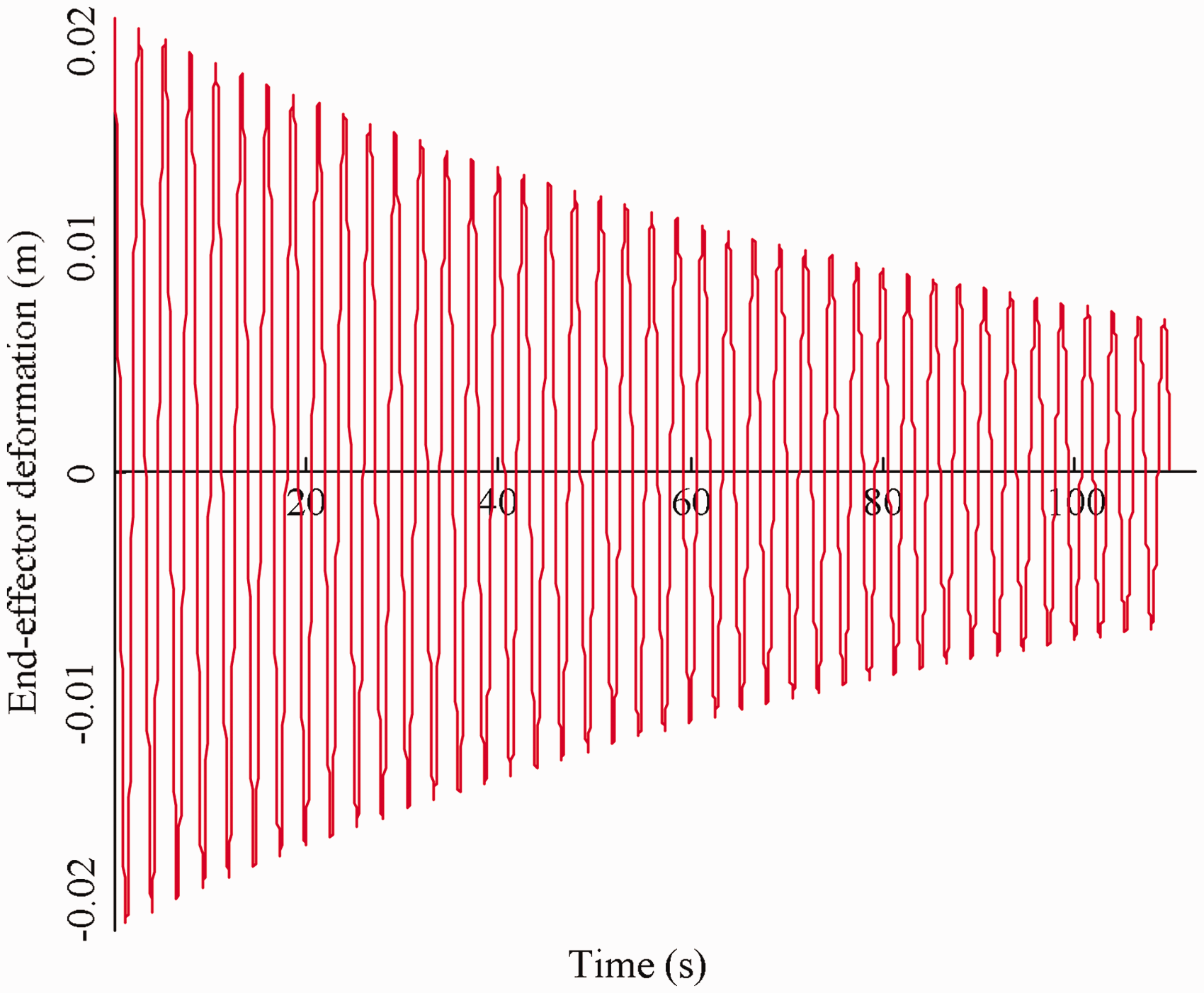
Vibration response of the uncontrolled manipulator.
In order to reduce vibration of the flexible manipulator via the internal resonance, a vibration absorber is attached to the manipulator, as shown in Figure 1. The distance r measured from the Joint 4 to the Joint 3 is 0.4 m. The distance
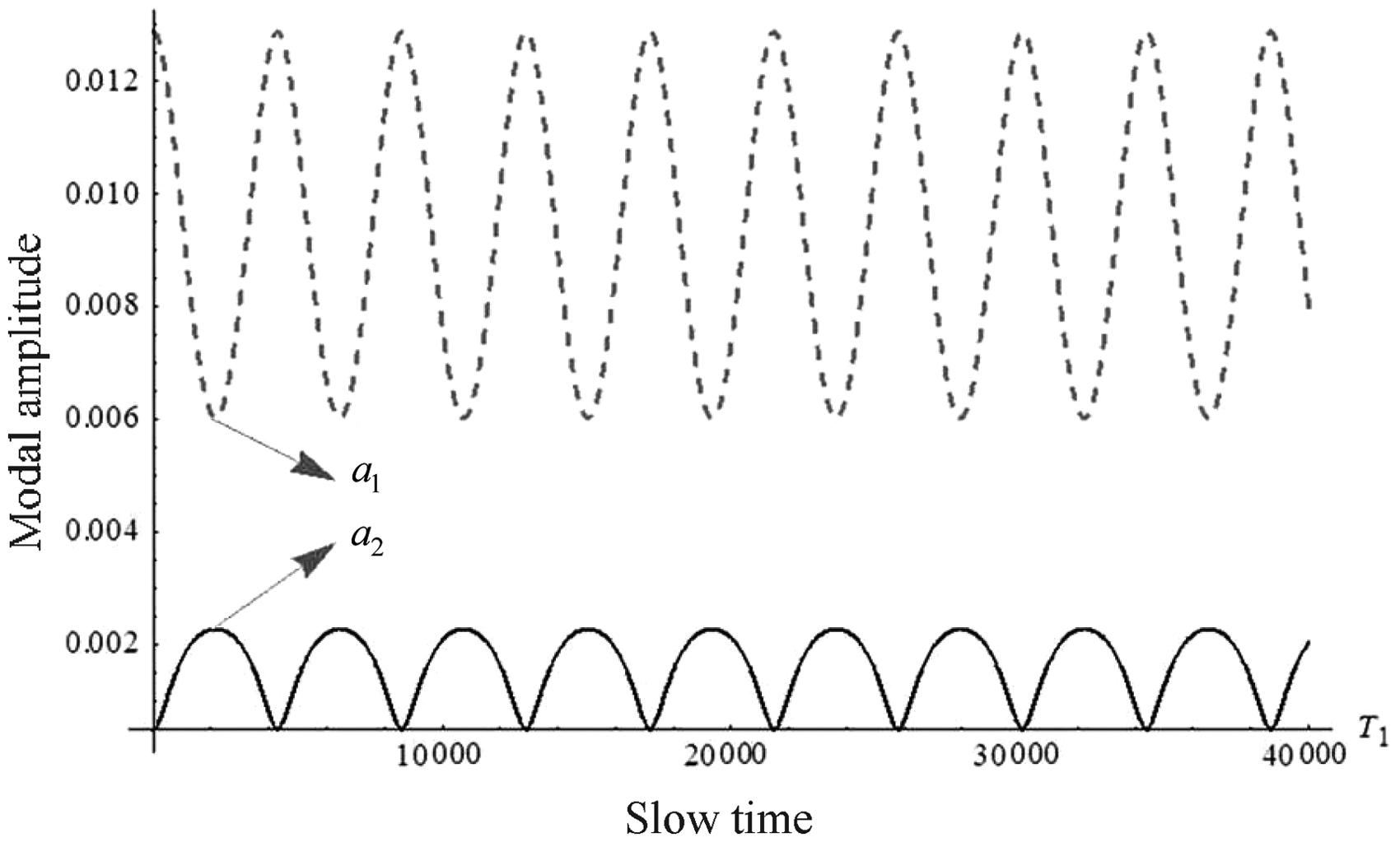
Undamped modal amplitudes.
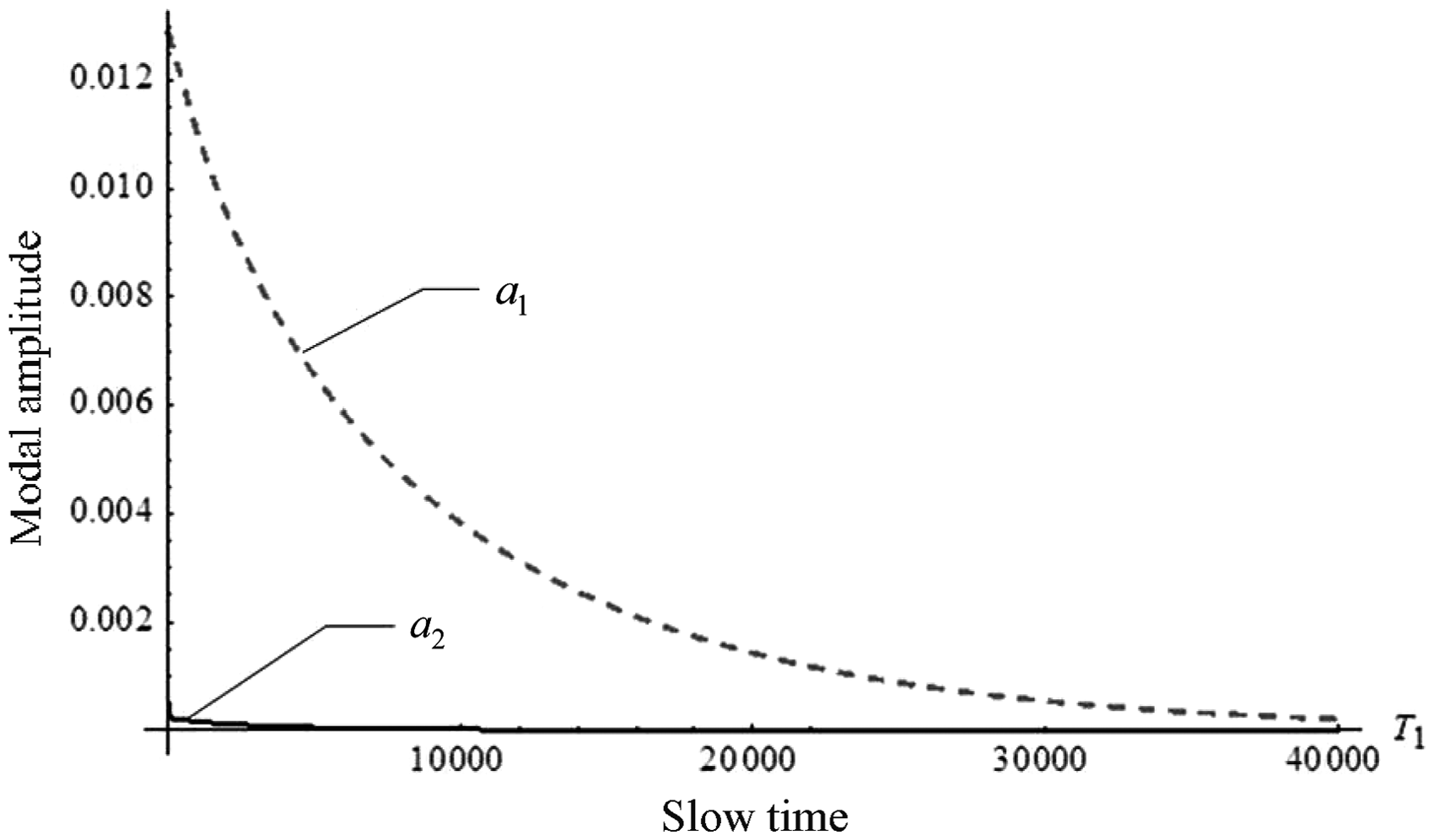
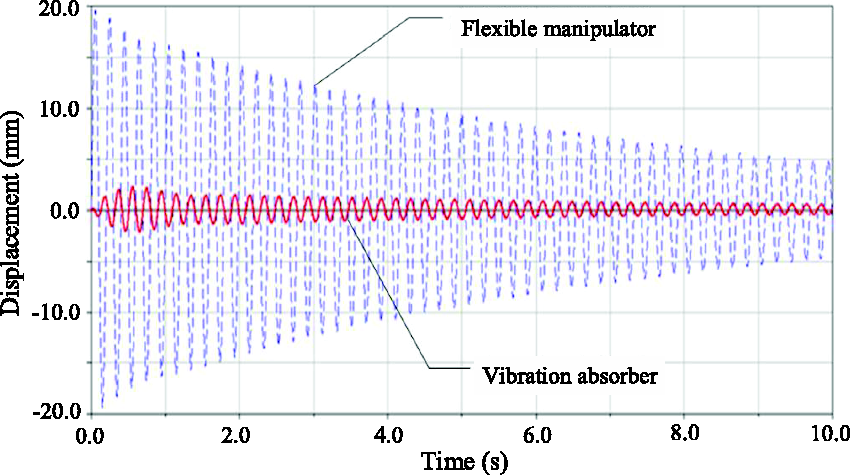
When the damping of the vibration absorber is considered, e.g.
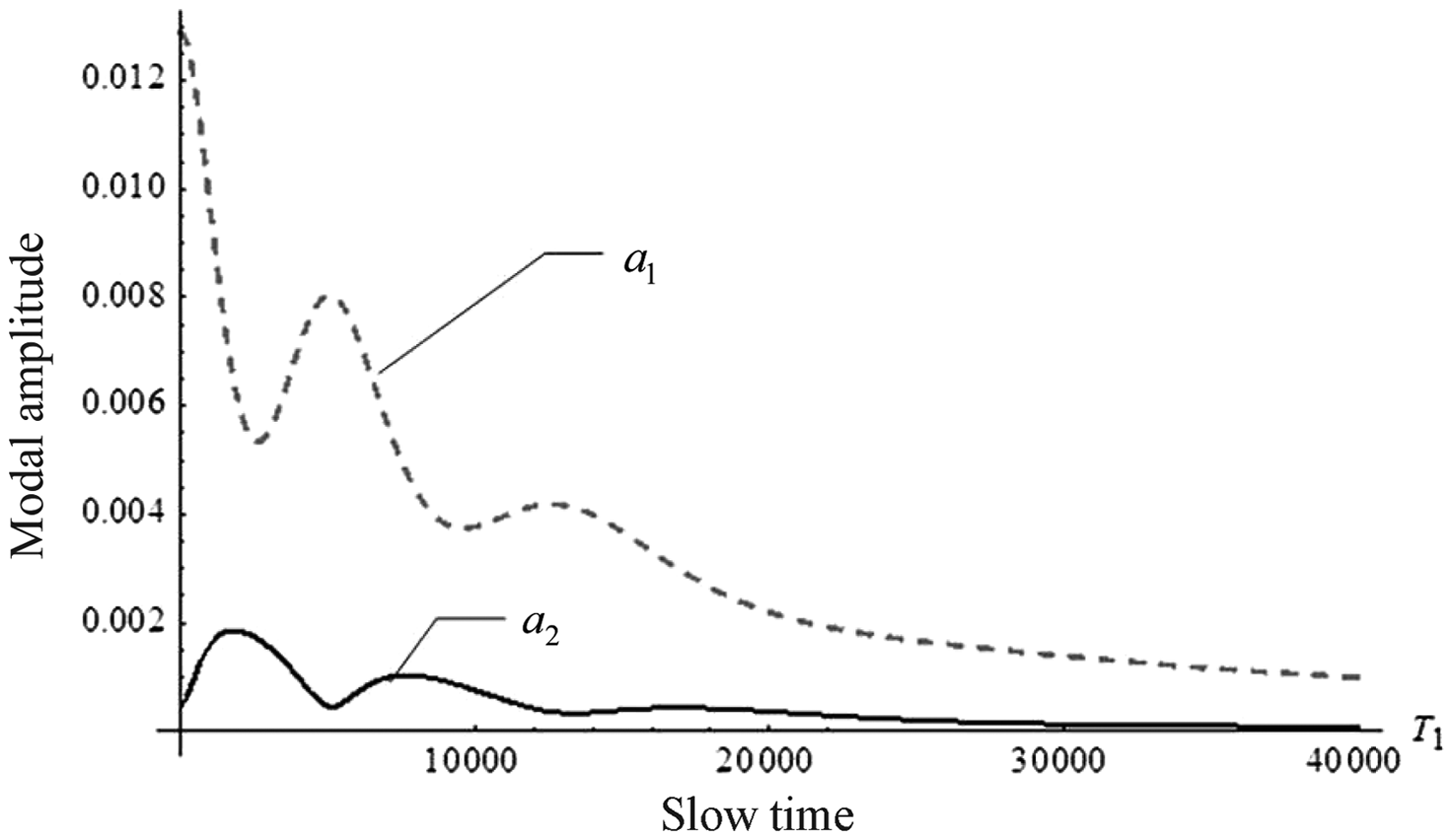
Response of modal amplitudes.
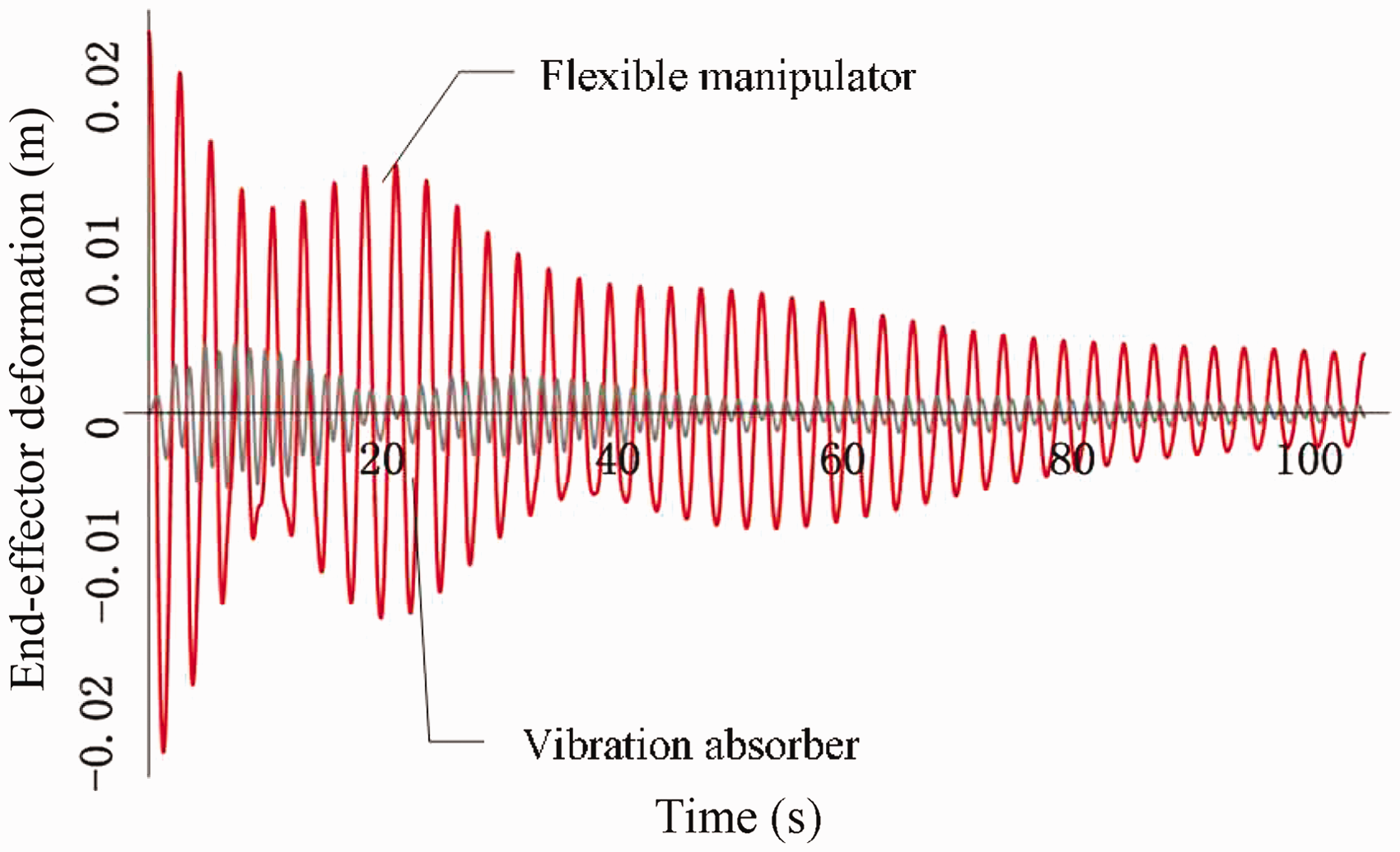
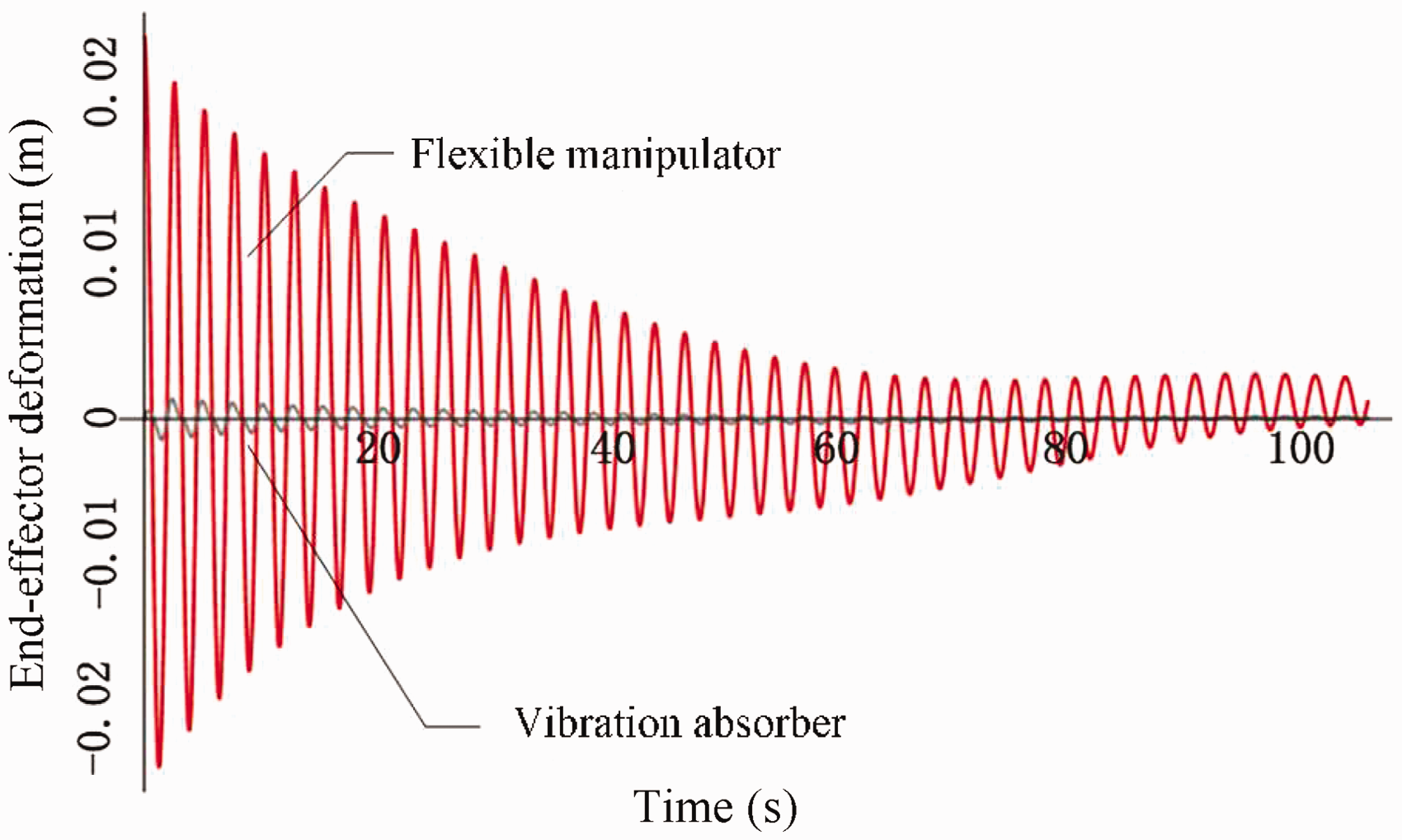
Response of flexible manipulator and vibration absorber.
If the damping of the vibration absorber is increased, e.g.
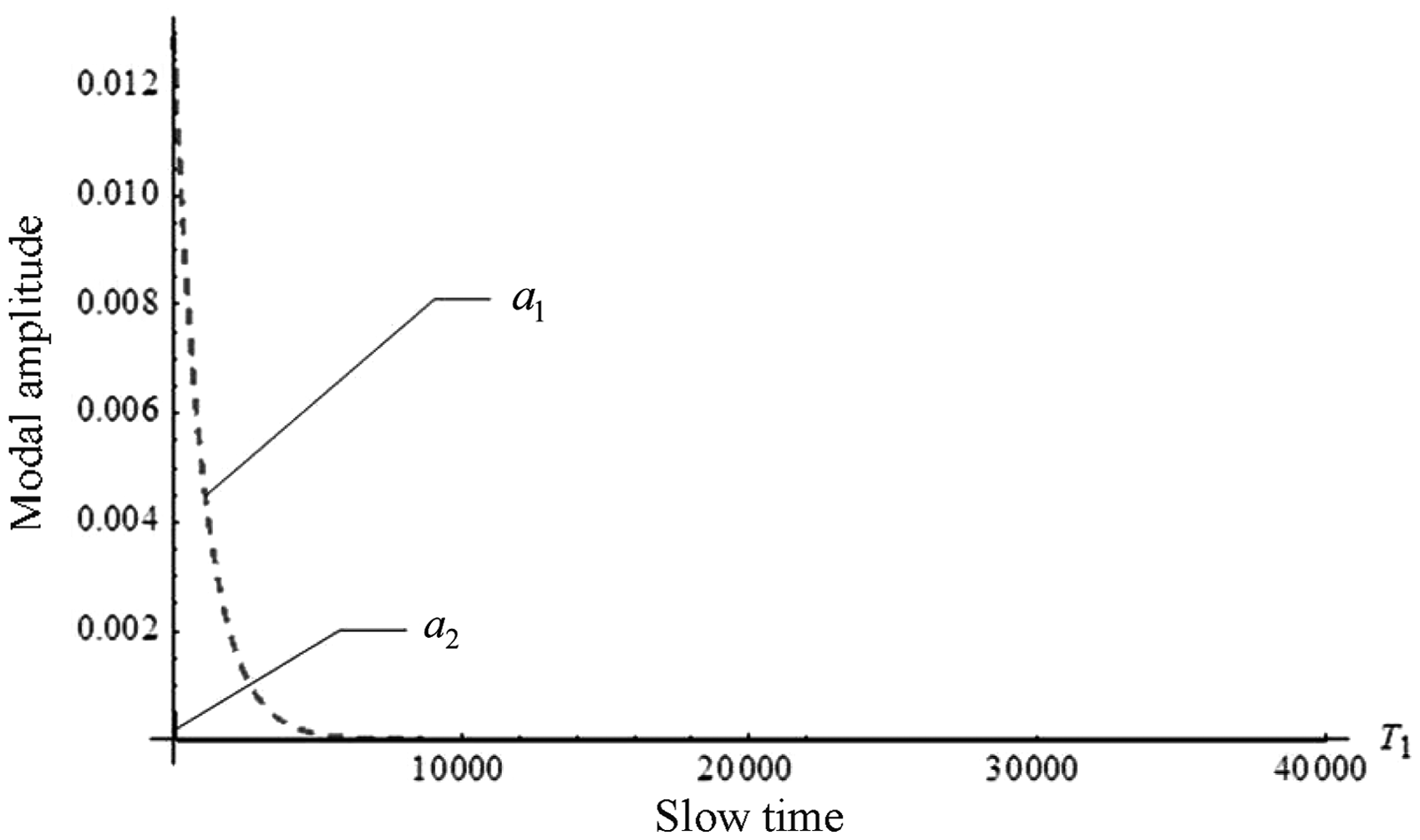
Response of modal amplitudes.
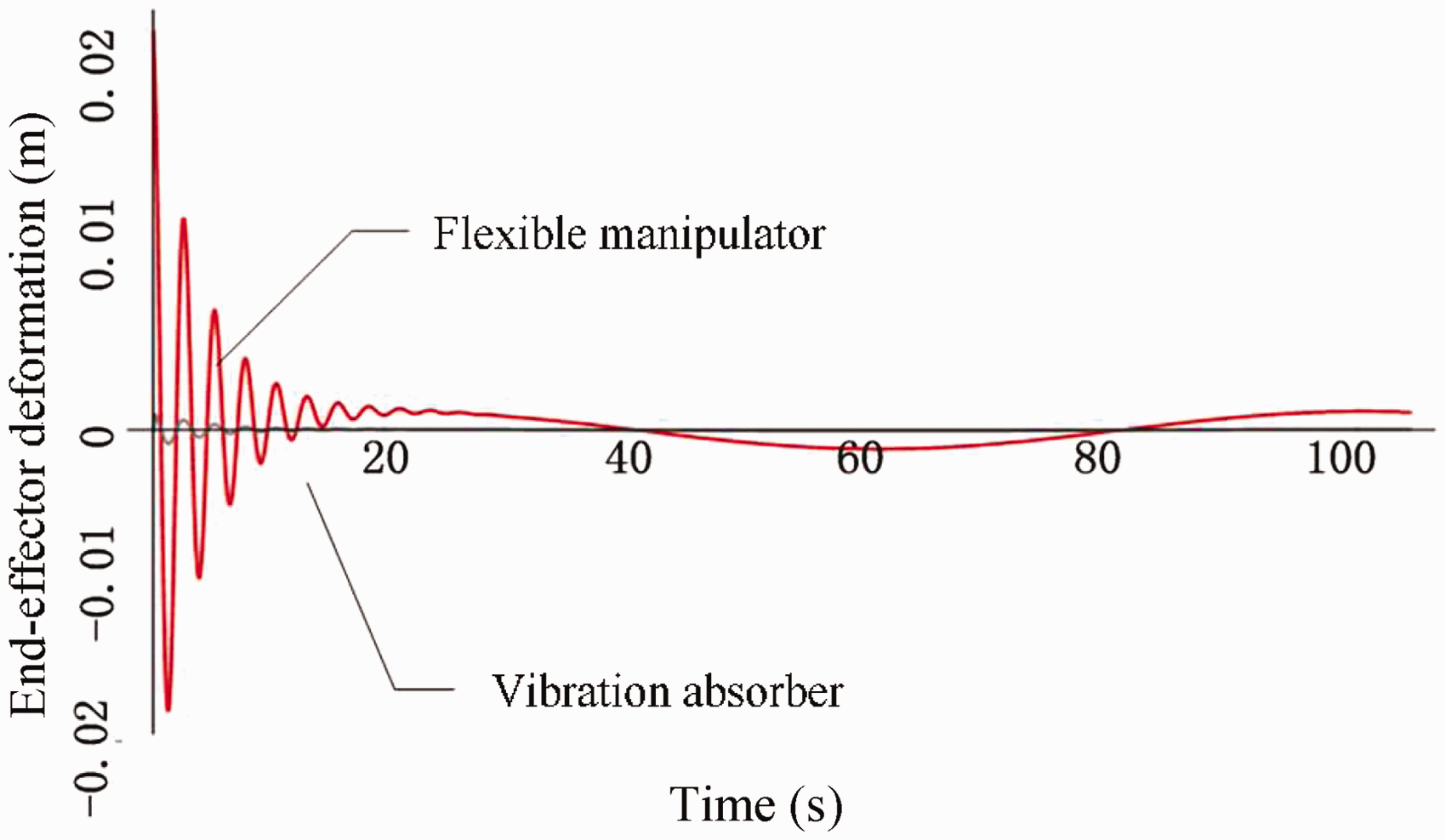
Response of flexible manipulator and vibration absorber.
However, if the damping of the vibration absorber is excessive, e.g.
Response of modal amplitudes.
Response of flexible manipulator and vibration absorber.
To further verify above theoretical study, several virtual prototyping simulations are conducted using well-known ADAMS software (Automatic Dynamic Analysis of Mechanical System, MSC Software Corp.). Since dynamics analysis and vibration solution for the flexible link and the vibration absorber are all implemented by ADAMS software rather than by our own numerical simulation program, more convincing results can be obtained.
Dynamics models of the flexible link and the vibration absorber are established using ADAMS software, as shown in Figure 11. If the damping of the vibration absorber is not taken into account, given the initial disturbance 20 mm, the vibration responses of the flexible manipulator and the vibration absorber are obtained under the internal resonance condition and shown in Figure 12. The “beat” phenomenon can be observed, that is, when the amplitude of the flexible manipulator is decreasing to the minimum, the amplitude of the vibration absorber is increasing to the maximum, and vice versa. It means that the internal resonance has been successfully established and the vibration energy is exchanging between the flexible manipulator and the vibration absorber. If the damping of the vibration absorber is taken into account, e.g. 0.089 in ADAMS, the vibration responses are shown in Figure 13. It takes only 10 s to decrease about 80% of the initial vibration amplitude.
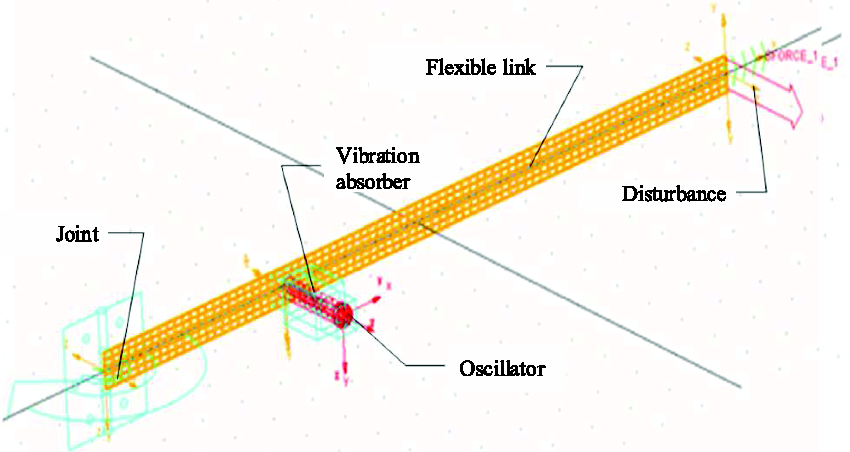
Models of flexible link and vibration absorber in ADAMS.
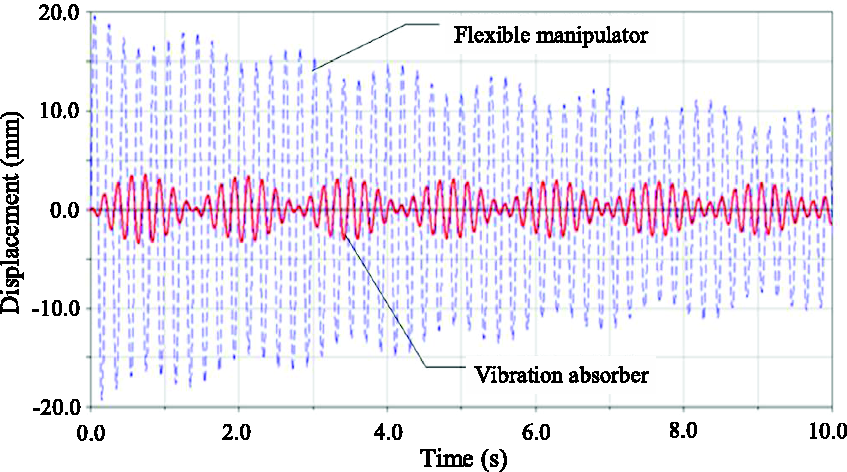
Vibration responses without the damping of vibration absorber (in ADAMS).
Vibration responses with the damping of vibration absorber (in ADAMS).
Through above simulation and analyses, it is verified that the internal resonance can be used as a feasible tool to reduce nonlinear vibration of the flexible manipulator.
Conclusion
In this paper, a vibration absorption method is suggested to damp out nonlinear vibration of the flexible manipulator based on modal interaction. It is implemented based on a nonlinear dynamics phenomenon known as the internal resonance. The method of multiple scales is used to investigate modal interaction behaviors between the flexible manipulator and vibration absorber. Through theoretical analyses, it is proven that the internal resonance can be successfully established via the modal interaction for dissipating the vibration energy of the flexible manipulator using the damping of the vibration absorber. Since the proposed method absorbs rather than suppresses the vibration energy of the flexible manipulator, it is more suitable for attenuating strong vibration than conventional active control methods based on smart material actuators with limited energy output. In addition, since this method puts an emphasis on constructing an internal energy transfer channel from the flexible manipulator to the vibration absorber rather than directly responding to external excitations, it is particularly convenient to reduce nonlinear vibration induced by unknown or unpredictable external excitations.
Supplemental Material
Supplemental material for Nonlinear vibration control for flexible manipulator using 1: 1 internal resonance absorber
Supplemental material for Nonlinear vibration control for flexible manipulator using 1: 1 internal resonance absorber by Yushu Bian and Zhihui Gao in Journal of Low Frequency Noise, Vibration and Active Control
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was supported by National Natural Science Foundation of China (grant no. 51675017) and Civil Astronautics Pre-Research Project during the “13th Five-Year Plan” (grant no. D020205). In addition, the authors want to thank Dr. Jie Li and Dr. Sicheng Yi for their support.
Appendix 1
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.