
Abstract
Development of micro and ultra-precision machining, precision instruments and equipment, precision assembly and testing has put forward more and more high requirements to vibration isolation on environmental elements, especially the pedestrian excitation generated by workers' normal walking. Therefore, it is very important to study the pedestrian excitation's influence on vibration characteristics of precision instruments and equipment. In this study, dynamic model including mathematical model of pedestrian excitation, interaction model between pedestrian and rectangular plate structure, the human–plate coupled dynamic equation in vertical direction of pedestrian–plate structure was established. And then we use the Newmark-β method to solve the time-domain step-by-step integration of the first four order modes' dynamic equations and study the influence of the linear notion trajectory along the central axis direction on the dynamic characteristics of the rectangular plate. By simulation, we discussed plate structure response under different conditions, including plate structure displacement and acceleration response under the single person excitation with different velocities, under normal walking velocity with different number of pedestrians and under this case of different distance between two pedestrians. The results show that the structural vibration induced by pedestrian excitation has great influence on dynamic characteristics of plate.
Keywords
Introduction
Development of micro and ultra-precision machining, precision instruments and equipment, precision assembly and testing has put forward more and more high requirements to vibration isolation on environmental elements. At present, grating manufacturing is one of the most sophisticated technology and the grating ruling machine is known as the king of precision machinery. Grating ruling accuracy of large grating machine is not only affected by manufacturing accuracy of the machine itself and the control system precision of mechanical processing system, but also influenced by the vibration of machine itself and external environment. The experimental analysis shows that even if the pedestrian excitation generated by workers' normal walking also will affect the grating fabrication precision. As shown in Figure 1, positioning error of the grating ruling machine presents a certain periodic change as time goes on. After time estimation, we got that the time of the relatively large positioning error also is just the time for staff to go on and off work, that is to say the pedestrian excitation generated by workers' normal walking has influence on the positioning of the grating ruling machine. Therefore, it is very important to study the pedestrian excitation's influence on vibration characteristics of precision instruments and equipment.
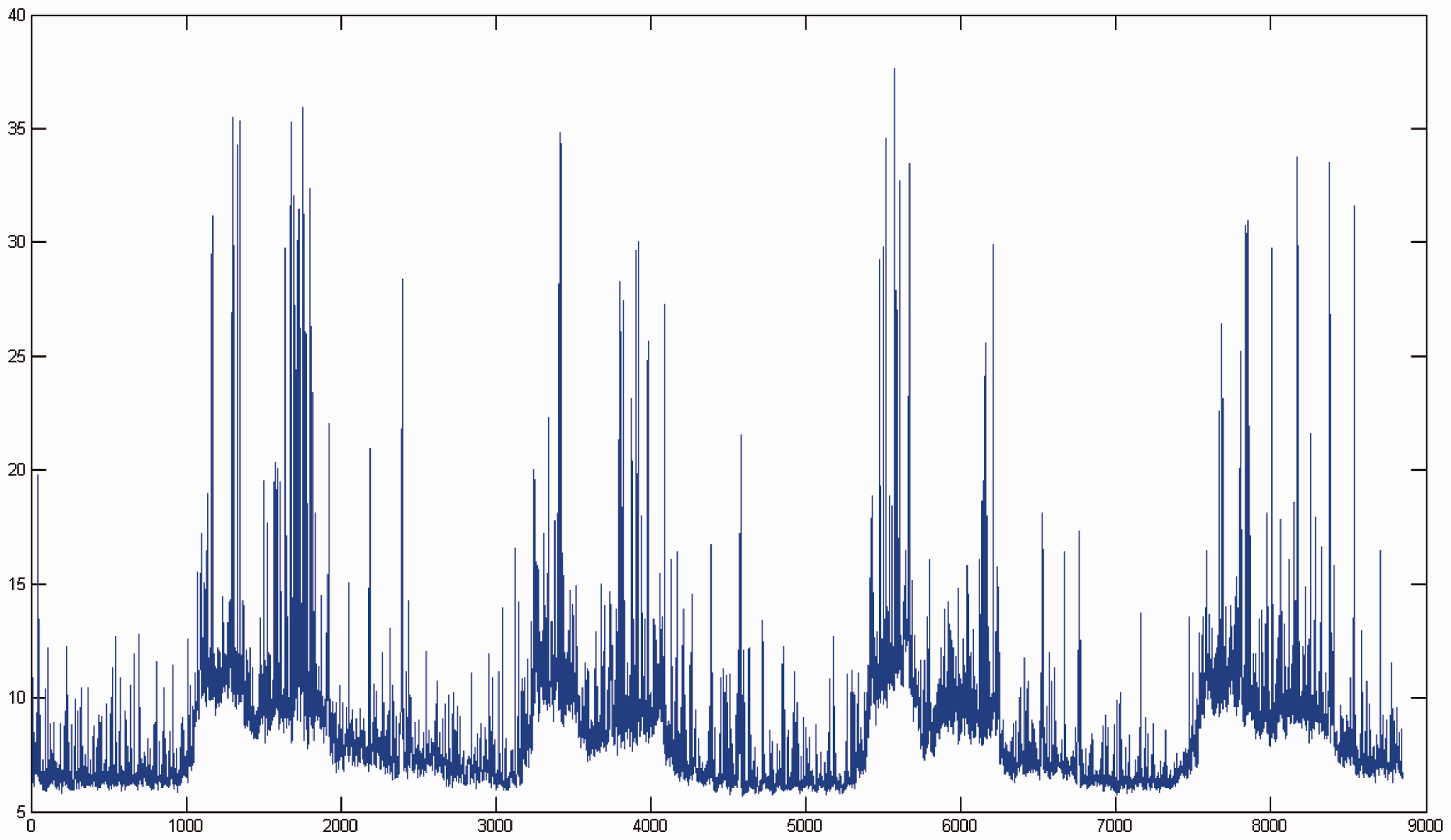
Change of grating machine positioning error with the grating line number.
Precision instruments and equipment in the work need to be placed on a vibration isolation platform which can effectively suppress the vibration of machine itself and external environment. The vibration isolation platform is placed on a metal plate structure that is the same size of the laboratory, as shown in Figure 2. In our study, in order to simplify the model and facilitate calculation, we consider the device itself and vibration isolation platform as part of the metal structure and focus on the dynamic characteristics of plate structure under pedestrian excitation.
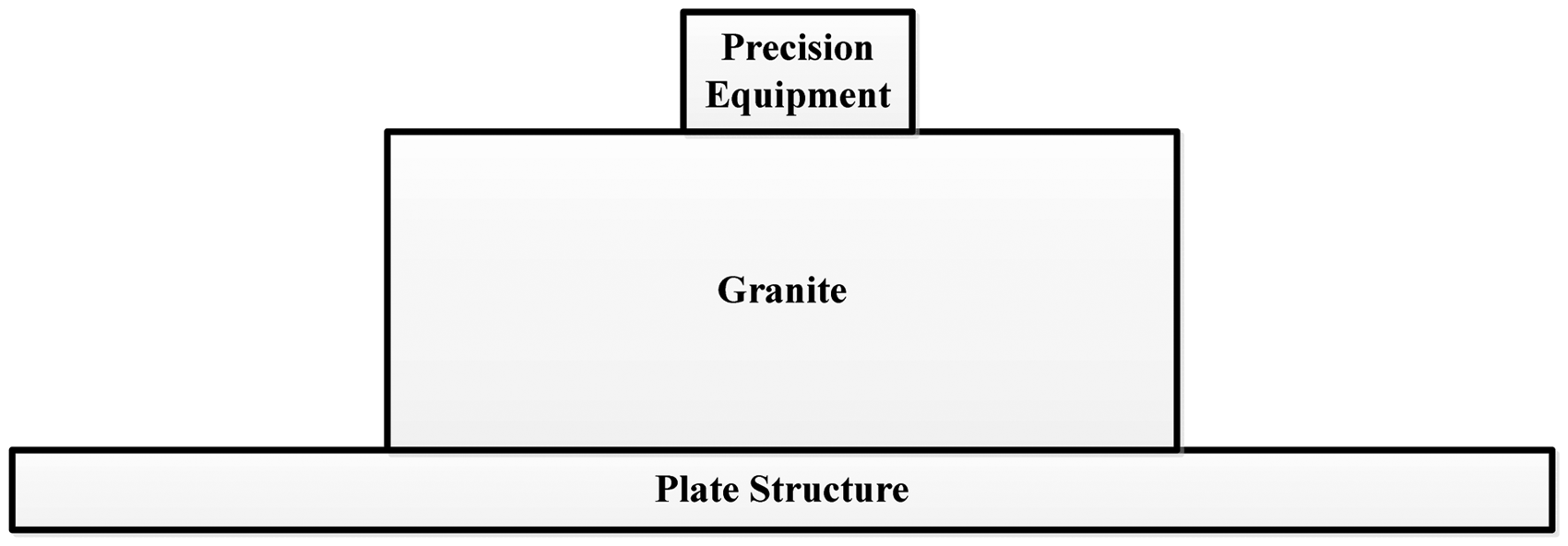
Structure layout schematic diagram.
In the past period of time, many academics have carried out both the theoretical and experimental study on plate structure. Hasheminejad and Keshavarzpour 1 adopted a multi-objective mixed H-2/H robust output feedback control synthesis for active low-frequency sound radiation control of a piezo-laminated composite circular plate. The adopted control system concurrently captures the benefits of both H-2 transient control performance and H robust stability in the face of external disturbances and system uncertainties. By using a new finite element method, Esen 2 studied the transverse vibration of a rectangular plate under the moving mass. Combined with the traditional method, the new method can be used to solve the plate structure problem with different geometry, load and boundary conditions. Boz et al. 3 presented a numerical and an experimental study on an active vibration control system which includes a fully clamped plate and two surface bonded piezoelectric actuators and a collocated velocity sensor at one of the actuator locations. Results show that the developed control methodology effectively suppresses the vibration amplitudes at multiple modes of the structure and also vibration attenuation levels can be predicted accurately with the simulations for various controller design parameters. Agu and Kasperski 4 researched the effects of random dynamic parameters on the structure-population coupling system's dynamic characteristics and established the stochastic dynamic characteristic probability model. Overall, the fewer people on the plate structure, the more dispersed the dynamic characteristics of the coupling system was. Nakamura 5 established dynamic model of the pedestrian bridge under lateral excitation and, by parametric study, they found that the smaller the pedestrian bridge's damping and mass was, the greater the dynamic response was. At the same time, response of pedestrian bridge is to be enhanced with the increasing population density. Khanna and Singhal 6 presented a mathematical model to analyse the vibration of a tapered isotropic rectangular plate under thermal condition and calculated the first two modes of frequency of rectangular plate for five boundary conditions such as C-C-C-C, SS-SS-SS-SS, C-SS-SS-SS, C-SS-C-SS and C-C-C-SS, where C and SS stand for clamped boundary and simply supported boundary, respectively. By experimental analysis, Toso et al. 7 built the biomechanical model between the human and structure, while the human were in walking state and the biomechanical model shows that human can enhance the system damping but reduce the system frequency. That is to say, the human can significantly affect the dynamic characteristics of structure. Based on the evaluation of the human vertical inertia, Mazzoleni and Zappa 8 studied the influence of vertical dynamic load caused by human jumping and swinging on civil buildings and verified the obtained results by experiments. Racic and Pavic 9 established the quasi-periodic human jumping force signal mathematical model which can be used for evaluating the vibration comfort of civil engineering assembly structure. Racic and Morin 10 structured the data-driven model of vertical dynamic excitation of bridges induced by people running and the model is an essential prerequisite for future quality models of dynamic loading induced by individuals, groups and crowds running under a wide range of conditions. Han et al. 11 took the standing human body as an elastic non-uniform column with distributed mass, damping and stiffness and studied the dynamic characteristics of a standing crowd-plate system by adopting the energy method. Also in their study, the influence of the crowd to plate's mass ration and crowd's position on the dynamic characteristics of the crowd-plate system was discussed in detail. Liu and Xie 12 studied the influence of uniform crowd on the dynamic characteristics of simply supported Euler beam by facilitating the crowd as an elastic mass model with uniform distribution. With SDF human body model, He et al. 13 developed the dynamic model of a coupled system consisting uniformly distributed crowd and damped plate. In their study, they constructed the crowd as a uniformly distributed mass-spring-damper system and studied the effects of both the mass ratio and frequency ratio of the crowd to the plate on the coupled system dynamic characteristics. Wang and Xing 14 studied the adaptive Newmark method of variable mass beam and proved that the adaptive Newmark algorithm is not only suitable for time-varying systems, but also has high precision. Based on Newmark algorithm, Xiao and Shen 15 researched the dynamic response of simply supported beam with moving load speed.
Above all, the study on the influence of the crowd number, walking speed and the interval between the pedestrians on dynamic characteristics of the plate structure under pedestrian excitation is very limited. Therefore, in our study, we research the dynamic characteristics of plate under pedestrian excitation based on Newmark-β method and this paper is organized as follows: The next section presents the dynamic modeling in vertical direction of pedestrian–plate structure. Mathematical model of pedestrian excitation, interaction model between pedestrian and rectangular plate structure and the human–plate coupled dynamic equation in vertical direction of pedestrian–plate structure are then established. In the subsequent section, the Newmark-β method is used to solve the time-domain step-by-step integration of the first four order modes' dynamic equations and study the influence of the linear notion trajectory along the central axis direction on the dynamic characteristics of the rectangular plate. Finally, concluding remarks are given in the last section.
Dynamic model in vertical direction of pedestrian–plate structure
Mathematical modeling of pedestrian excitation
In Sahnaci and Kasperski,
16
walking requiring at least one foot contact with the ground is generally characterized as a horizontal movement of a general human body and its frequency range is generally 1.4–2.2 Hz. In this paper, the average frequency and walking speed of pedestrians are estimated to be 2 Hz and 1.11 m/s, respectively. In the course of walking, it is assumed that the vertical force caused by each foot has the same size and the whole force is periodic. The above assumptions are used by some researchers, such as Caprani et al., Bachmann and Ammann, Kala et al., Ohlsson and Allen et al.17–21 In the existing research, the individual excitation can be expressed by Fourier series as follows:

Different values of DLF and
The pedestrian excitation is divided into static and dynamic components. The static and the dynamic components are, respectively, correspond to pedestrian weight and the sum of harmonic functions, of which the frequency is the integer multiple of walking frequency. In numerical simulation, the force model together with the biological dynamics model is used to illustrate the dynamic effect of body vibration when pedestrian is walking on the structure. The relevant parameters of equation (1) are drawn from Butz et al. 22 and the walking force changes over time as shown in Figure 3.
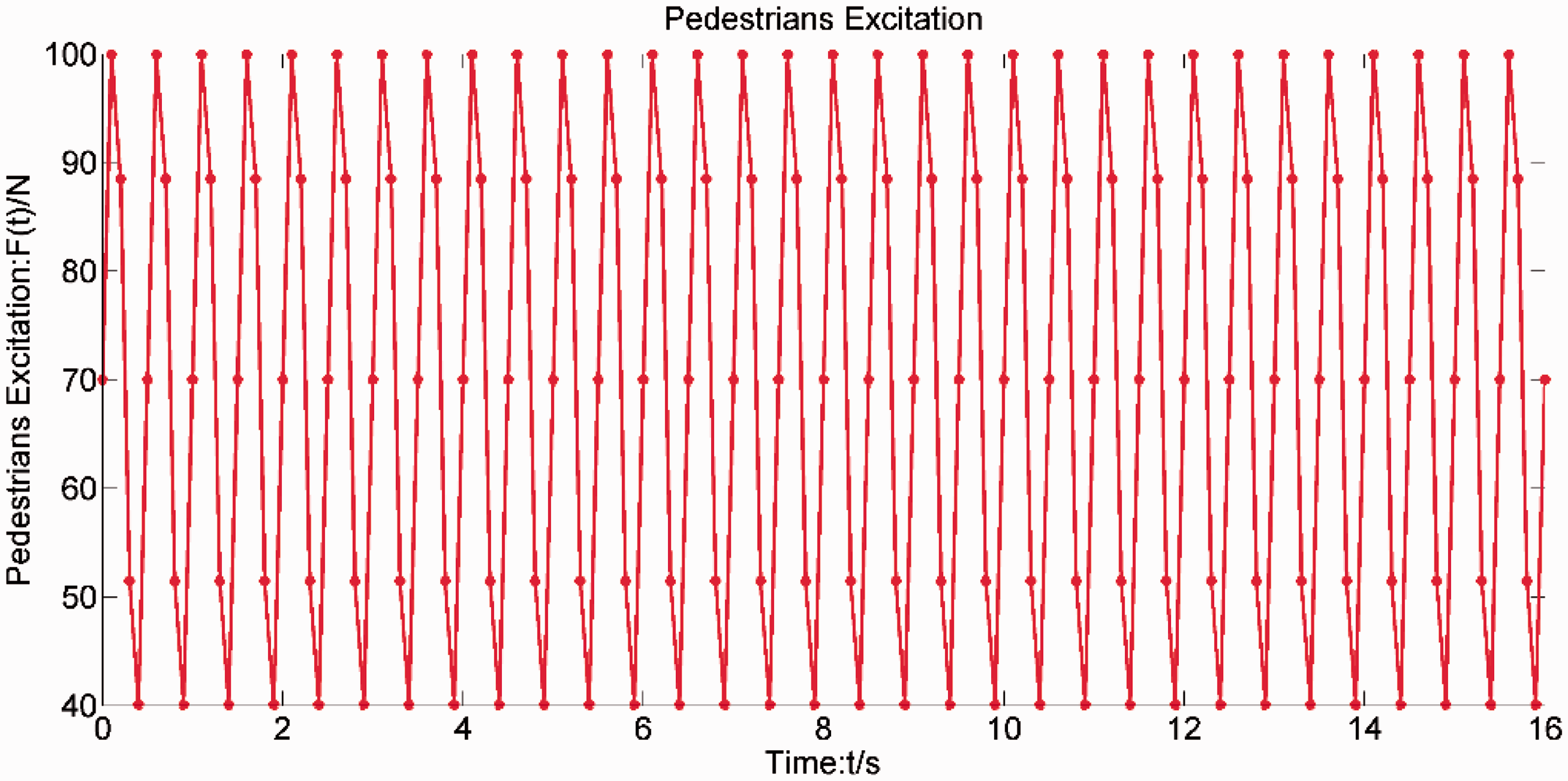
Response curve of walking force with time.
Interaction model between pedestrian and rectangular plate structure
The interaction between human and plate structure is a complex, cross disciplinary research problem, including human body dynamic and structure dynamics. In the field of civil engineering dynamics, the vibration caused by human activities is increasingly becoming the focus of attention and there has been an increasing number of engineering problems related to human activities, such as vibration of floor, bridges and stairs. The interaction characteristics between the human and the structure are very important when designing a flexible structure under the condition of people walking on it. Figure 4 is the structure diagram of human–plate, where the a (in length direction), b (in width direction) and h (in thickness direction) are the structure size, and l is the average interval between pedestrians waking on the plate.
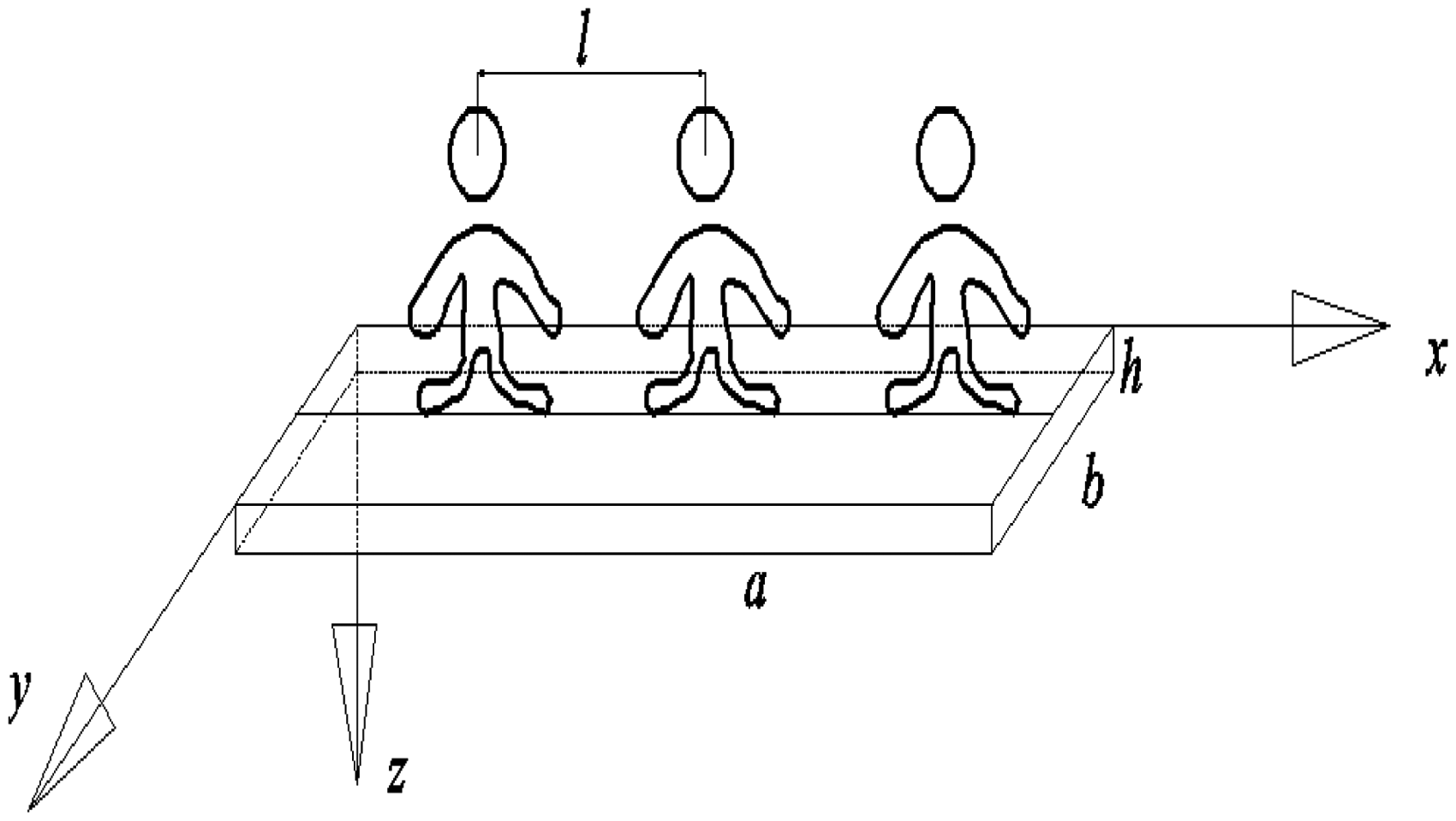
Structure diagram of human–plate.
Human body biomechanical model
With experimental methods, the dynamic characteristics of the whole human body have been obtained by biomechanical researchers. At present, in the field of biological dynamics, the more nature human dynamics model are single-degree-of-freedom spring-mass-damper model, two-degree-of-freedom spring-mass-damper model and the overall model. 23 In the vertical vibration problem of human–plate structure, human body model is usually equivalent to the mass-spring-damping system. In this paper, the biomechanical model is drawn from Jiménez-Alonso et al. 24 , as shown in Figure 5. The force acting on the plate is caused by the human body walking. From Figure 5, we know that the human body is a system composed of the principal structure mass ms,a, principal structure stiffness kp, principal structure damping cp, the coupling mass ms and the values of the parameters mentioned above are drawn from He et al. 25 as shown in Table 2.
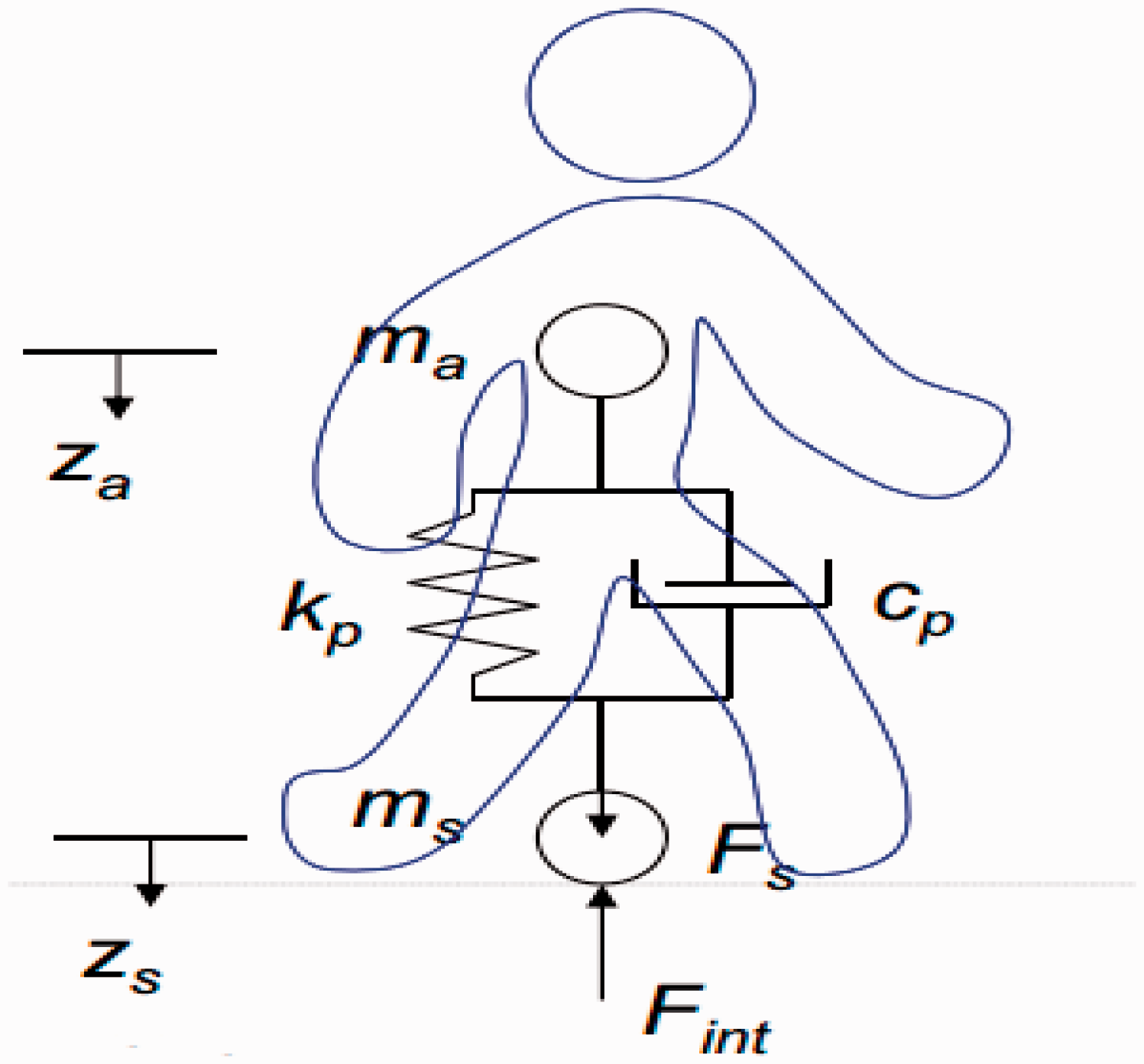
Dynamic model of human body.
Related parameters of the human body dynamics model.

By implementing dynamic analysis, the dynamic equation of human body is established as follows


Plate structure dynamics model
In this paper, it assumes that all of the whole plate edge boundary conditions are the simply supported and also the damping is ignored. According to the plate structure vibration theory, the vibration differential equation of the plate under external force can be established as follows


Related parameters of the plate structure.

The mathematical description of those simply supported boundary conditions and the pedestrian excitation are given as equations (6) and (7), respectively.


In equation (7), (


According to the plate structure vibration theory, the free vibration equation of rectangular plate can be described as follows


Coupling equation and solving method
Establishment of the human–plate coupled dynamic equation
With all the equations in ‘Dynamic model in vertical direction of pedestrian–plate structure’ section, equation (4) can be simplified as follows

The orthogonality of modal function can be described as

By multiplying equation (13) on both sides by
Equation (15) can be expressed in the matrix form as follows




The natural frequency and modal shape of plate structure under simply supported boundary condition can be expressed as follows


Newmark-β method
As the mode shape in human–plate coupled dynamic equation established in ‘Establishment of the human–plate coupled dynamic equation’ section , all of the stiffness, damping, mass and force are time varying and the system motion equations also are changed to time varying second-order differential equations. The computation quantity solving the dynamic equation and the generalized characteristic equation directly is huge and so a kind of high precision and high efficiency algorithm should be found out to solve the dynamic response of the time-varying system. Newmark method is a direct integration method that widely used in structural dynamics and the property of this method is influenced by the parameter setting, especially parameter γ and β. According to the algorithm stability analysis, we know that Newmark method is unconditionally stable when γ ≥ 0.5 and β ≥ (1/2 + γ) 2/4 and the only parameter needed to be considered is time step Δt.
The mathematical expression26,27 of Newmark method is as follows:


Numerical simulation of experimental research
In this study, we use the Newmark-β method to solve the time-domain step-by-step integration of the first four order modes' dynamic equations and study the influence of the linear notion trajectory along the central axis direction on the dynamic characteristics of the rectangular plate. In this section, the response point is located at the center of the plate structure.
The position coordinate of the person s is as follows

The plate structure displacement response under the single person excitation with different velocities is shown in Figure 6 and those different velocities, respectively, are normal walking velocity(v = 1.11 m/s), fast walking velocity (v = 1.8 m/s) and normal running velocity (v = 2.5 m/s). From Figure 6, we can find that the displacement response under normal running velocity is more significant than under the other two velocities and at the same time the time required to reach the peak is also the shortest. Also we can know that the decay time of the plate displacement response under normal walking velocity is relatively late than under the other two velocities. Therefore, in order to avoid generating larger vibration and then influencing the machine operation placed on the plate structure, we should control the pedestrian walking velocity properly when implementing the vibration control for plate structure.
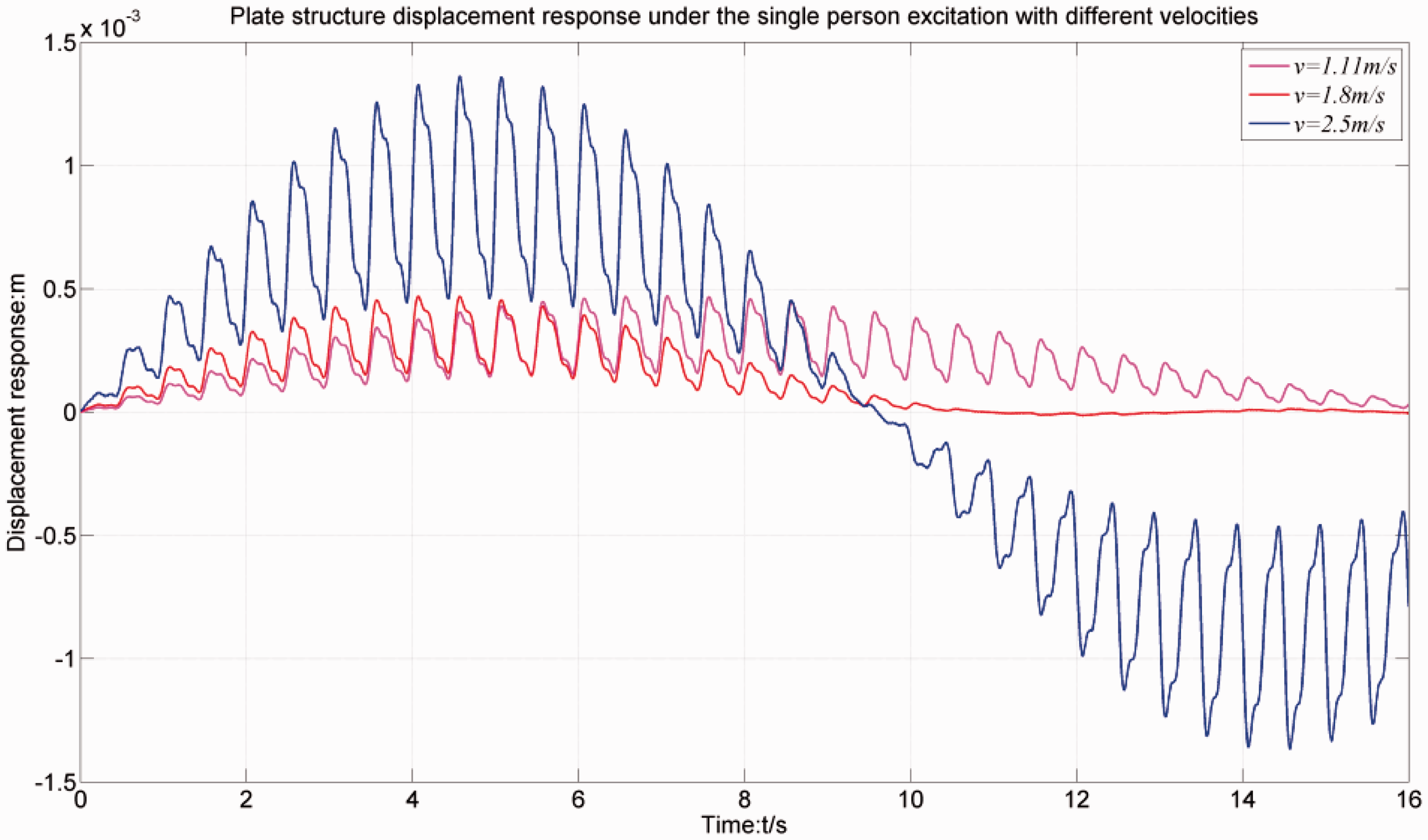
Plate structure displacement response under the single person excitation with different velocities.
The plate structure acceleration response under the single person excitation with different velocities is shown in Figure 7. From Figure 7, we can find that the acceleration response spectrum is different, but the peak value of those acceleration is in the range of 0.1–0.15 m/s2. At the beginning of the simulation, when time is less than 1 s, the acceleration response under normal walking velocity is less than under the other two velocities and the change of acceleration response under the normal running velocity is the biggest. That is to say, the acceleration response at the initial stage is enhanced when the walking speed increases. Therefore, we should consider the influence of acceleration response on vibration comfort when implementing the vibration control for plate structure.
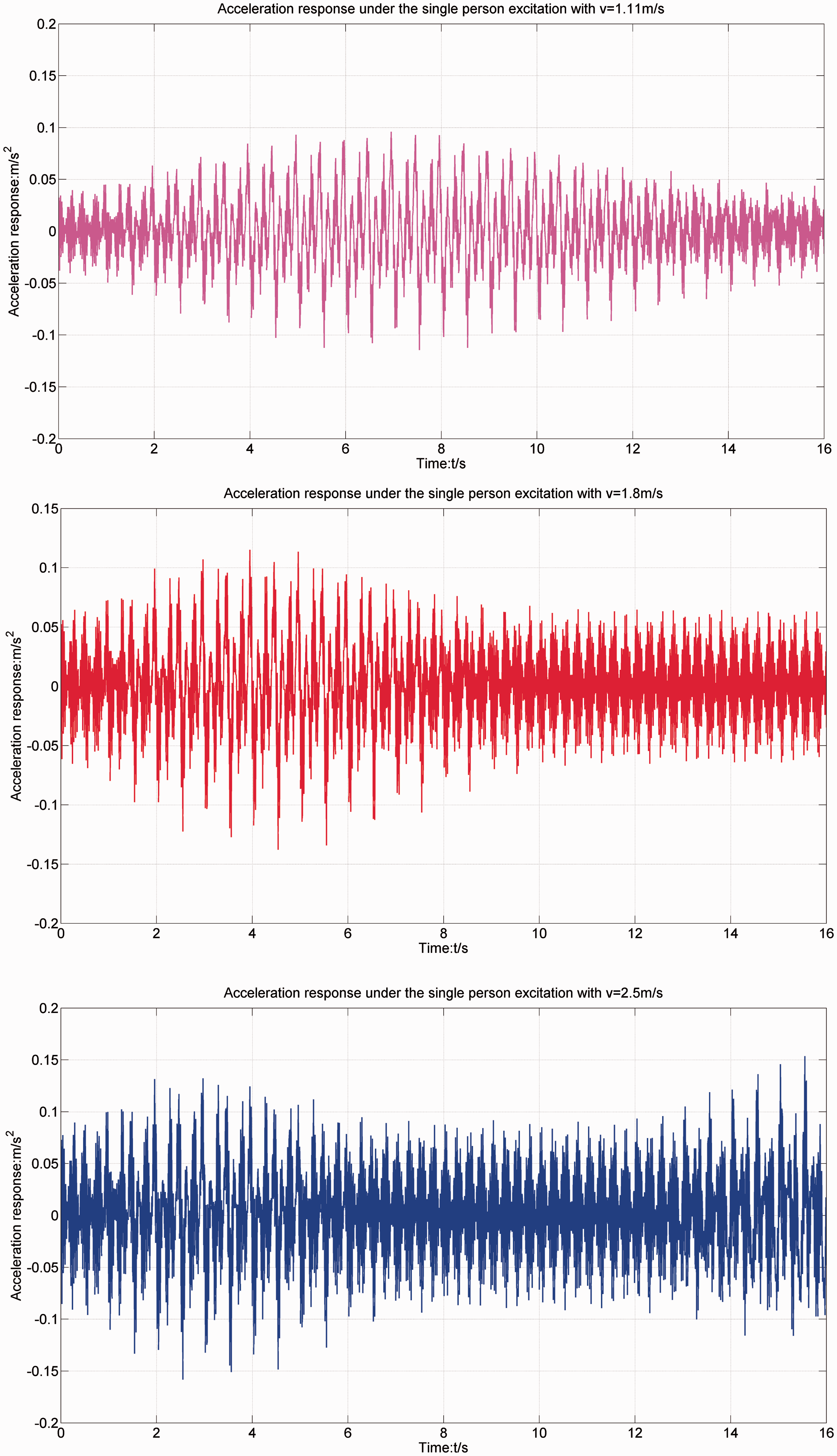
Plate structure acceleration response under the single person excitation with different velocities.
The first four-order acceleration response under the single person excitation with different velocities is shown in Figure 8. From Figure 8, we can find that the first-order acceleration response value changes significantly larger than the change of the other three orders, and the first-order and third-order acceleration peak values, respectively, are 0.07 m/s2 and 0.05 m/s2, while the other two order acceleration values are very small, reaching to 10−15 scale. Accordingly, we should focus on the influence of the first-order and third-order acceleration response on vibration characteristic.
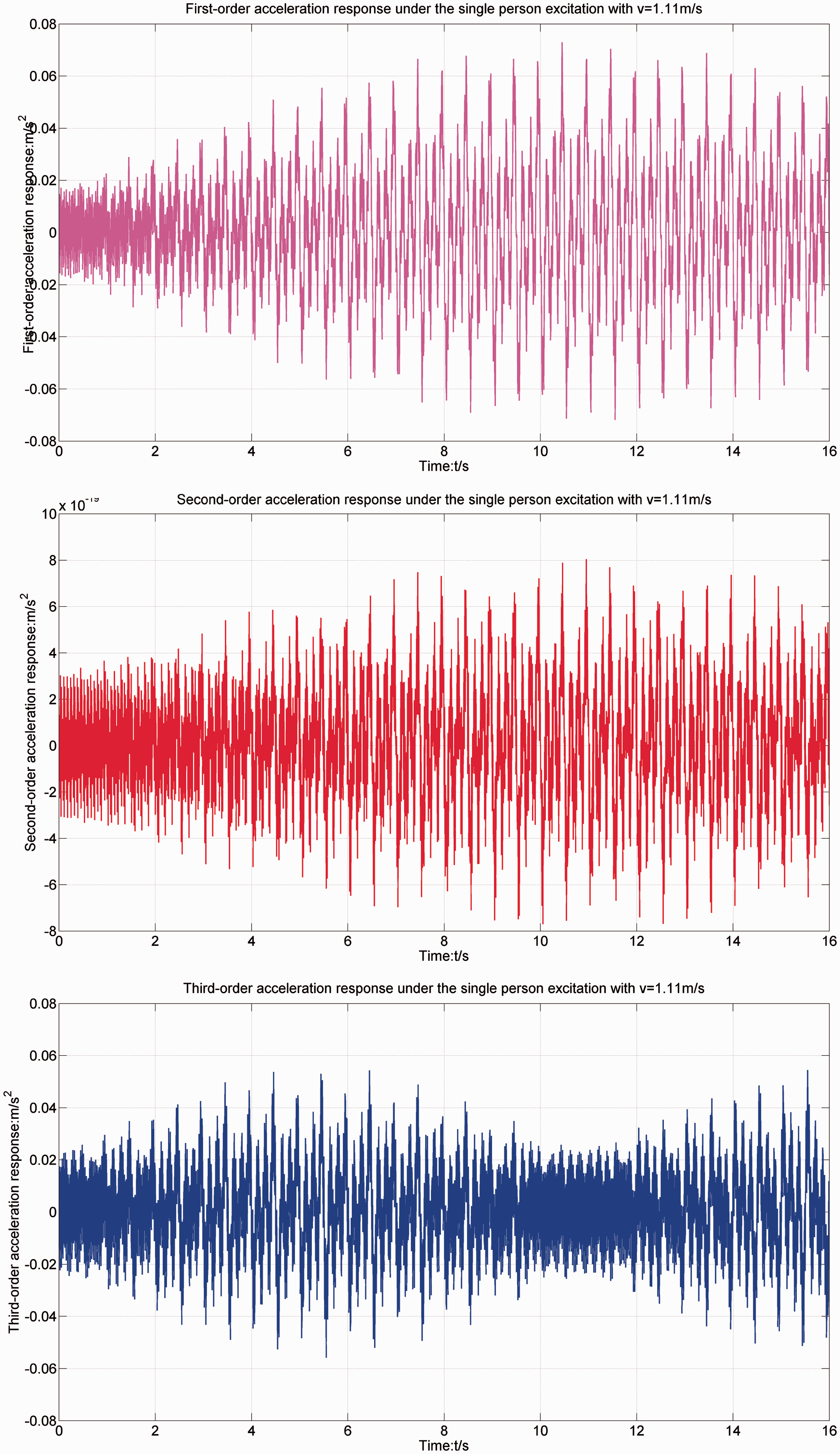
First four-order acceleration response under the single person excitation with different velocities.
Displacement response of plate with different number of pedestrians (pedestrian number N = 1,3,6) under normal walking velocity is shown in Figure 9 and the distance between two adjacent persons is 0.6 m, that is to say l = 0.6 m. With the increase of walking time, the displacement response of rectangular plate structure with different number of pedestrians is all firstly increased and then decreased. The peak time of the plate displacement response is the longest when six pedestrians walk simultaneously. From simulation we can find that the displacement response amplitude is not very significant when the pedestrian number is less than 3. Before reaching the displacement response peak, the displacement response amplitude under the single person excitation is greater than under six pedestrians walking simultaneously, but after reaching the displacement response peak, the opposite state is presented. When the pedestrian is more than 3, the change of displacement response amplitude is very significant and then it will aggravate the plate structure vibration.
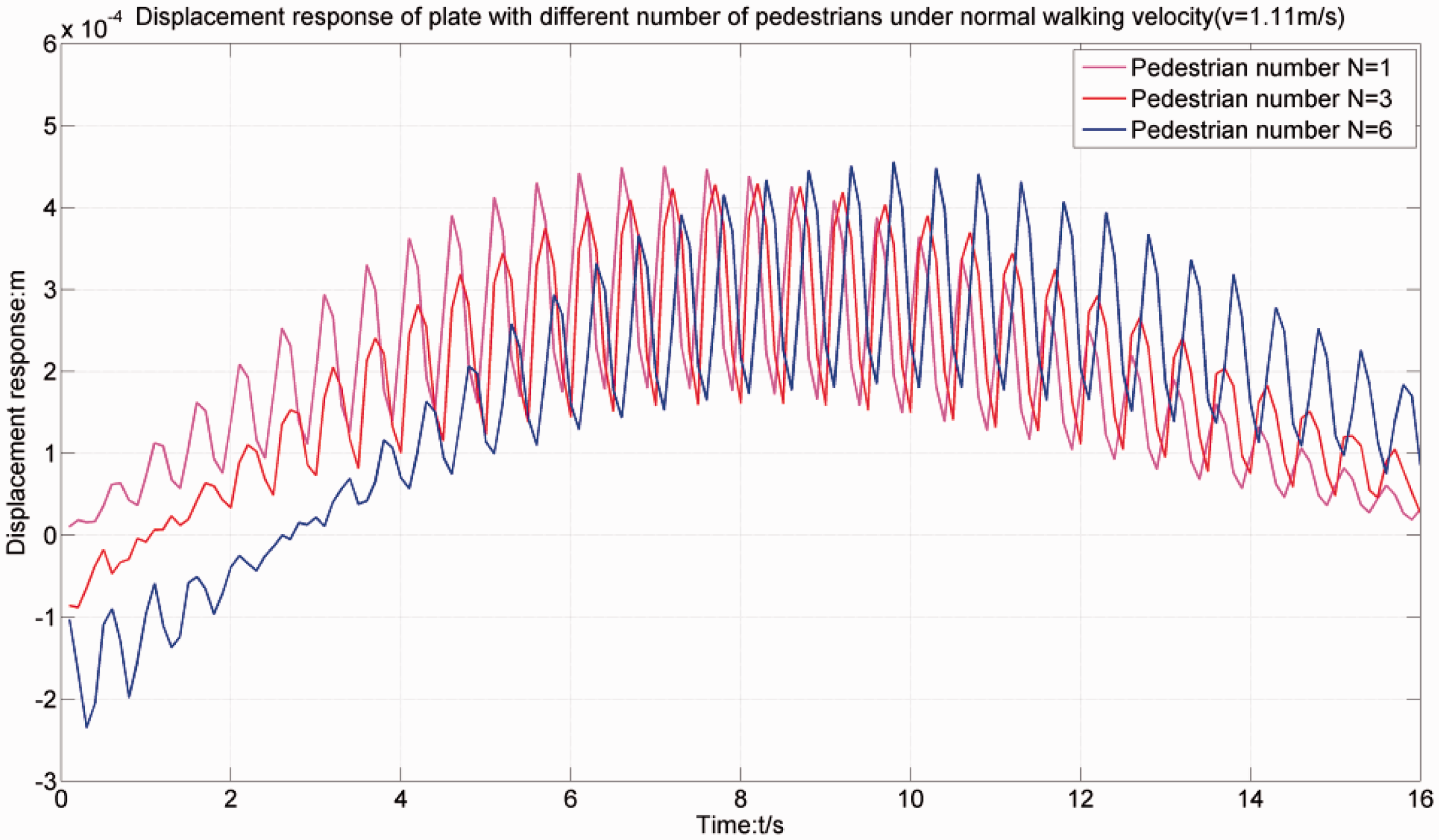
Displacement response of plate with different number of pedestrians under normal walking velocity.
Acceleration response of plate with different number of pedestrians (pedestrian number N = 1,3,6) under normal walking velocity is shown in Figure 10 and also the distance between two adjacent persons is 0.6 m. From simulation we can find that the acceleration response amplitude under the single person excitation is much smaller than under the other two cases and the amplitude range is −0.03–0.03 m/s2. The first-order acceleration response peaks of the pedestrian number 3 and 6, respectively, are 0.28 m/s2 and 0.24 m/s2 and the amplitude change is periodic. Therefore, the influence of the pedestrian number on vibration characteristic should be considered when implementing the vibration control of ultra-precision laboratory.
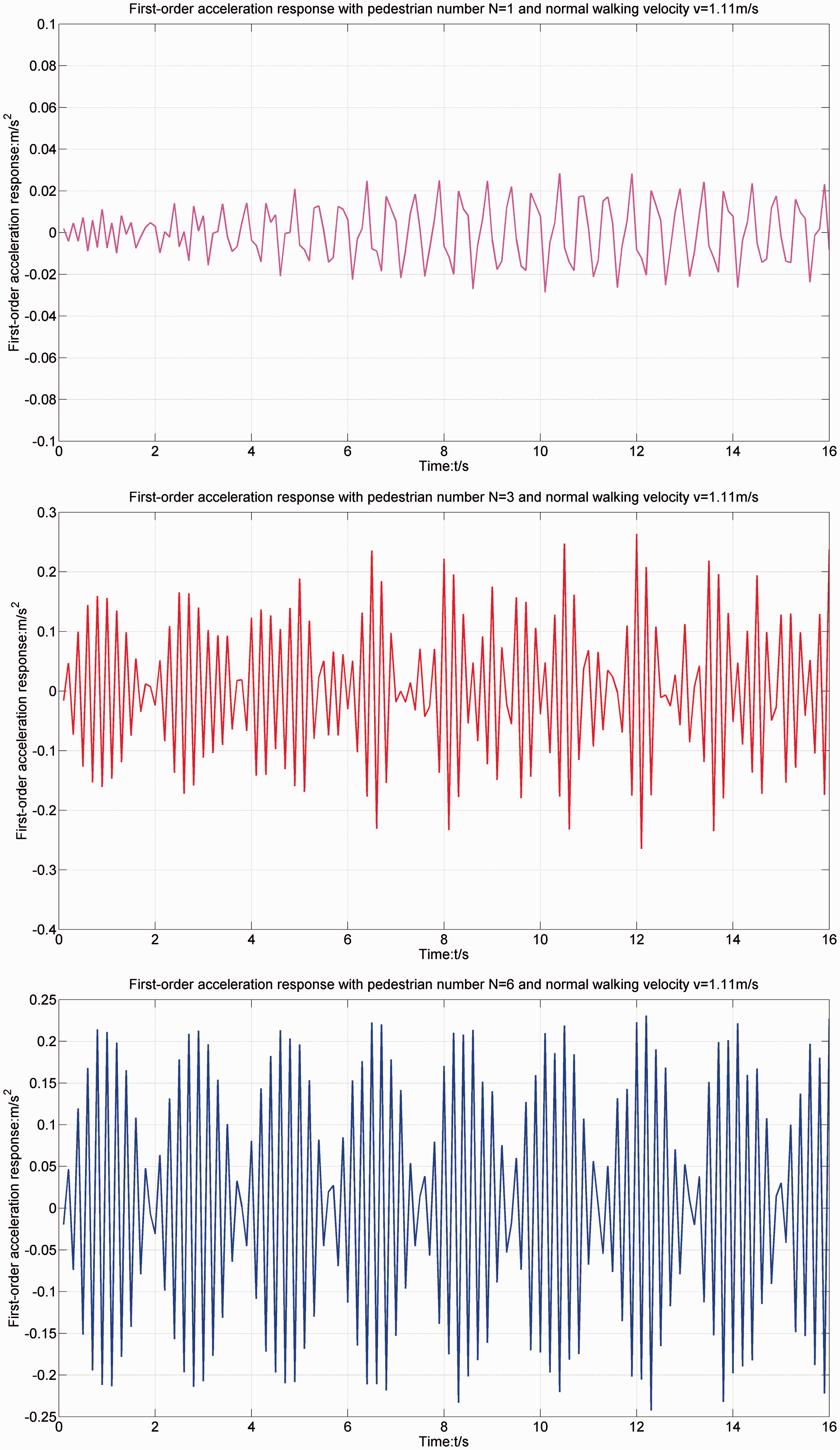
Acceleration response of plate with different number of pedestrians under normal walking velocity.
Figure 11 is the displacement response of plate under excitation of three pedestrians with different distance between two pedestrians. From the simulation result, we can find that the displacement response peak with different distance presents the trend of first increasing and then decreasing and while the distance is 0.6 m, the time of reaching to the peak is the shortest one. After reaching the peak, the displacement response amplitude of the distance is 0.6 m is smaller than the other two cases.
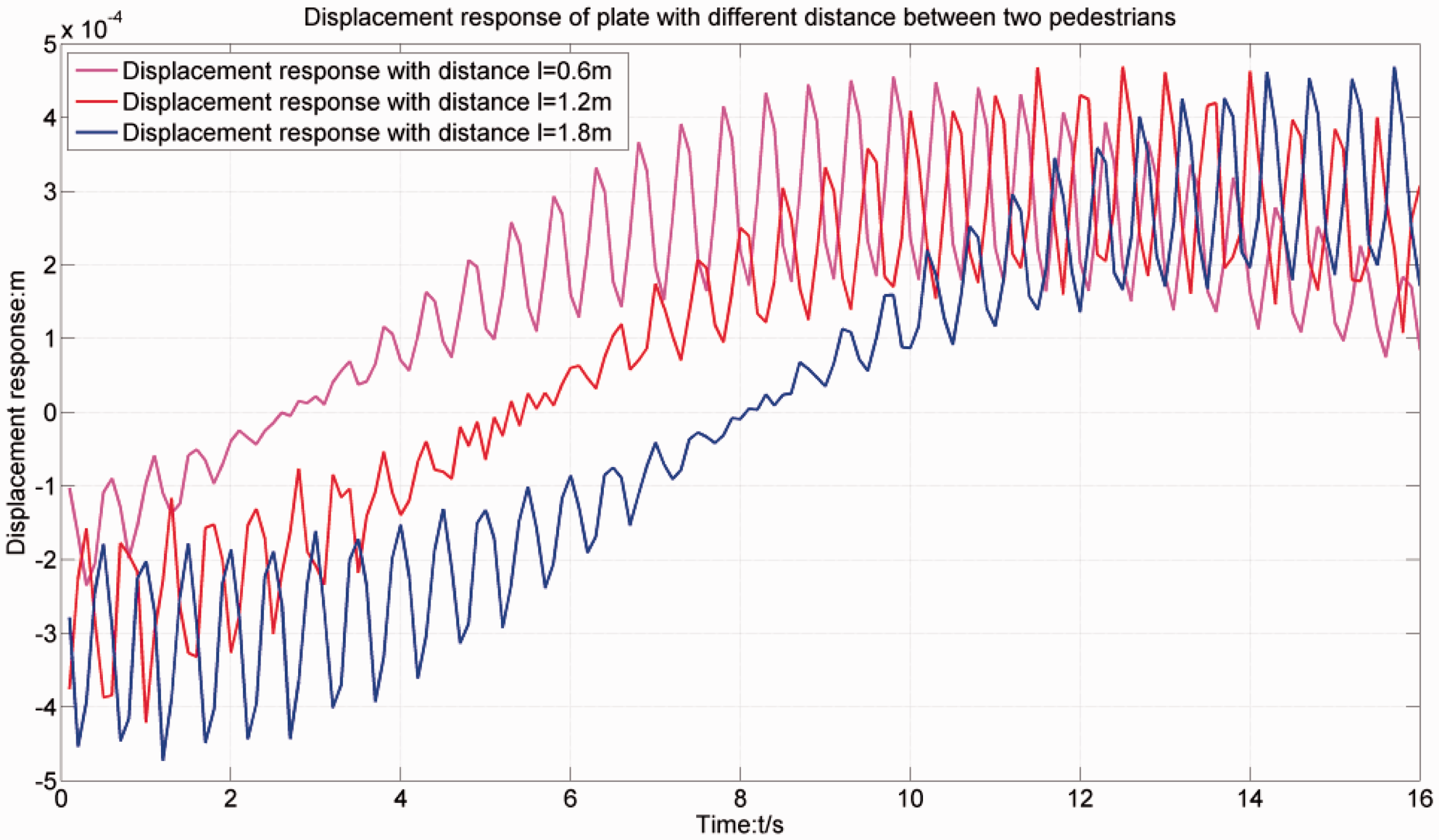
Displacement response of plate with different distance between two pedestrians.
The first-order acceleration response of plate with different distance between two pedestrians is shown in Figure 12. From Figure 12, we can find that the first-order acceleration response of distance is 0.6 m is the smallest one and its change range is −0.23–0.23 m/s2. The first-order acceleration response of distance 1.2 m changes obviously and its change range is −1.25–1.25 m/s2. When the distance is 1.8 m, however, the first-order acceleration response peak on this case is lower than that of distance 1.2 m and its change range is −0.5–0.5 m/s2. All of those cases, the peak–peak value of the first-order acceleration response increases first and then decreases with the increases of the interval between two pedestrians.
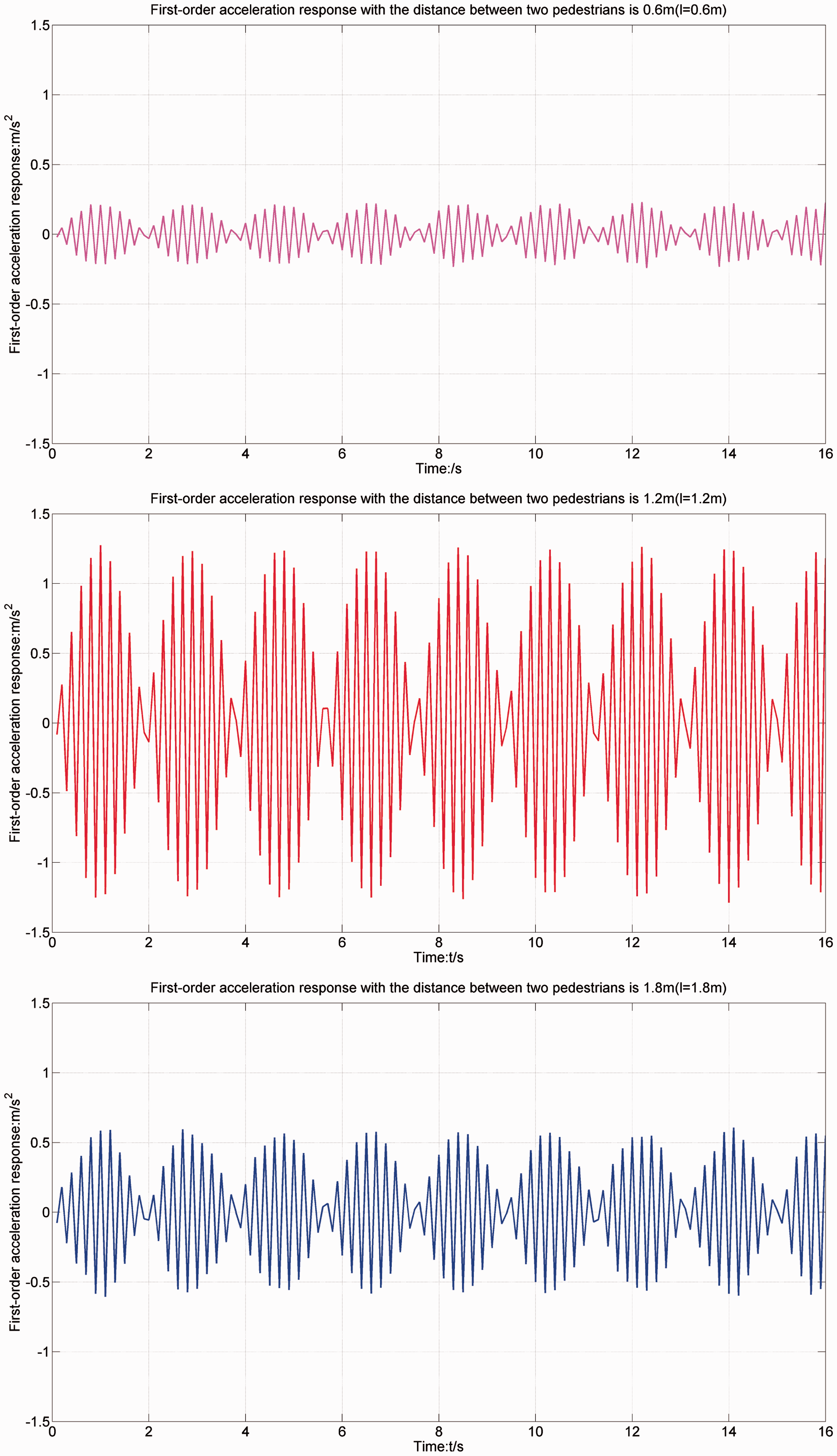
First-order acceleration response of plate with different distance between two pedestrians.
Conclusions
In this study, dynamic model including mathematical model of pedestrian excitation, interaction model between pedestrian and rectangular plate structure, the human–plate coupled dynamic equation in vertical direction of pedestrian–plate structure was established. And then we use the Newmark-β method to solve the time-domain step-by-step integration of the first four order modes' dynamic equations and study the influence of the linear notion trajectory along the central axis direction on the dynamic characteristics of the rectangular plate. By simulation, we discussed plate structure response under different conditions, including plate structure displacement and acceleration response under the single person excitation with different velocities, under normal walking velocity with different number of pedestrians and under this case of different distance between two pedestrians. Then we give some conclusions as followed:
The displacement response under normal running velocity is more significant than under the other two velocities and at the same time, the time required to reach the peak is also the shortest. Therefore, in order to avoid generating larger vibration and then influencing the machine operation placed on the plate structure, we should control the pedestrian walking velocity properly when implementing the vibration control for plate structure. Under this simulation condition as shown in ‘Dynamic model in vertical direction of pedestrian–plate structure’ section, the acceleration response of the initial stage under normal walking velocity is less than under the other two velocities and the change of acceleration response under the normal running velocity is the biggest. That is to say, the acceleration response is enhanced with the walking speed increases. The first-order acceleration response value changes significantly larger than the change of the other three orders, and the first-order and third-order acceleration peak values, respectively, are 0.07 m/s2 and 0.05 m/s2, while the other two order acceleration values are very small, reaching to 10−15 scale. Accordingly, we should focus on the influence of the first-order and third-order acceleration response on vibration characteristic. The displacement response amplitude is not very significant when the pedestrian number is less than 3 and when the pedestrian is more than 3, the change of displacement response amplitude is very significant and then it will aggravate the plate structure vibration. The first-order acceleration response peaks of the pedestrian number 3 and 6, respectively, are 0.28 m/s2 and 0.24 m/s2 and the amplitude change is periodic. Therefore, the influence of the pedestrian number on vibration characteristic should be considered when implementing the vibration control of ultra-precision laboratory. The peak–peak value of the first-order acceleration response is 0.46 m/s2, 2.5 m/s2, 1 m/s2, while the distance between two pedestrians is 0.6 m, 1.2 m, 1.8 m respectively. That is to say, under this simulation condition shown in this study, the acceleration response peak with different distance presents the trend of first increasing and then decreasing with the increases of the interval between the two pedestrians.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research work was supported by the National Natural Science Foundation of China (Grant No. 51705117), the National Program on Key Basic Research Project of China (973 Program, Grant No. 2014CB049500), the Fundamental Research Funds for the Central Universities (Grant No. JZ2016HGTA0695).