
Abstract
Aiming to identify the bearing faults level effectively, a new method based on kernel principal component analysis and particle swarm optimization optimized k-nearest neighbour model is proposed. First, the gathered vibration signals are decomposed by time–frequency domain method, i.e., local mean decomposition; as a result, the product functions decomposed from the original signal are derived. Then, the entropy values of the product functions are calculated by Shannon method, which will work as the input features for k-nearest neighbour model. The kernel principal component analysis model is used to reduce the dimension of the features, and then the k-nearest neighbour model which was optimized by the particle swarm optimization method is used to identify the bearing fault levels. Case of test and actually collected signal are analysed. The results validate the effectiveness of the proposed algorithm.
Introduction
A bearing widely used in the rotating machinery can be easily damaged. Identifying the bearing fault level by vibration signal analysis is important for rotating machine, as it can avoid the downtime and ensure high productivity of the machine.1–3
However, identifying a bearing fault level before it reaches catastrophic failure is a challenge; moreover, analysing bearing vibration signals is a common technique for monitoring bearing, thanks to the information present in bearing vibration signals.4,5 To identify the bearing fault level, advanced signal processing methods are generally used. 6 The time–frequency domain wavelet method and empirical mode decomposition (EMD) 7 are important for non-linear signals and hence are chosen for analysis of the bearing vibration signals. However, the EMD has the limitation of endpoint leak and model aliasing problem. The wavelet method has difficulty in choosing the mother wavelet coefficient for different signals. However, the bearing fault signal is usually very complex and may contain more modulated signals. The local mean decomposition (LMD) 8 is a method that can demodulate the frequency-modulated (FM) and amplitude-modulated (AM) signals effectively. The LMD can decompose such signals into a set of product functions (PFs) and the time-varying instantaneous frequency can be derived. Once the PFs are derived, the Shannon entropy is used to calculate the entropy values of the PFs. However, the values derived by Shannon entropy may still have higher dimensions. The principal component analysis (PCA) has usually been used for dimensionality reduction; however, the PCA only allows for linear dimensionality reduction. As the bearing fault features have more complicated dimensional, these cannot be well processed by the PCA method. The kernel principal component analysis (KPCA) method can deal with the non-linear features with complex dimensions, so it is used to reduce the dimension of the features.
Then, in order to identify the fault types, the k-nearest neighbour (KNN) model is used to achieve different features of classification. The KNN 9 model is a non-parameter model, and it needs k closest features as the input. With the target feature being distributed to sort the most unanimous among its k classes, the target is classified by a majority of other neighbours. KNN model is an instance-based learning model. In the KNN model, the trained features are stored in an n-dimensional space. When a bearing fault features chosen from the test data set are input into the KNN, it searches the k-stored features and selects the ones that are closest to the unknown input feature. There are many methods to achieve the optimization process10–13 such as particle swarm optimization (PSO) and genetic algorithms (GA). The system is initialized with a population of random solutions and searches for optima by updating generations. Compared to GA, the advantages of PSO are that it is easy to implement and there are only a few parameters to adjust. PSO has been successfully applied in many areas such as function optimization, artificial neural network training, fuzzy system control and other areas where GA can also be applied. In this research, the PSO method is used to quickly find the KNN in the training features.
In this research, the LMD is introduced to deal with the bearing FM and AM signals, the KPCA is used to deal with the original features so that the non-linear fault features can be extracted, and the POS method is used to speed up the convergence of the KNN algorithm and to achieve the bearing running state. Based on the proposed method, the collected vibration signal can be processed through advanced processing method to reduce the noise, and the typical features can be extracted directly to make the state identifying process reasonable and more accurate, especially the early fault can be classified precisely. The research is organized as follows: The next section introduces the features extraction method; ‘The optimized KNN model by PSO for features classification’ section introduces the procedure for the PSO optimized KNN model; ‘Validation’ section describes the test done to validate the proposed method; and in the final section, the conclusions are given. The proposed algorithm is shown in Figure 1.
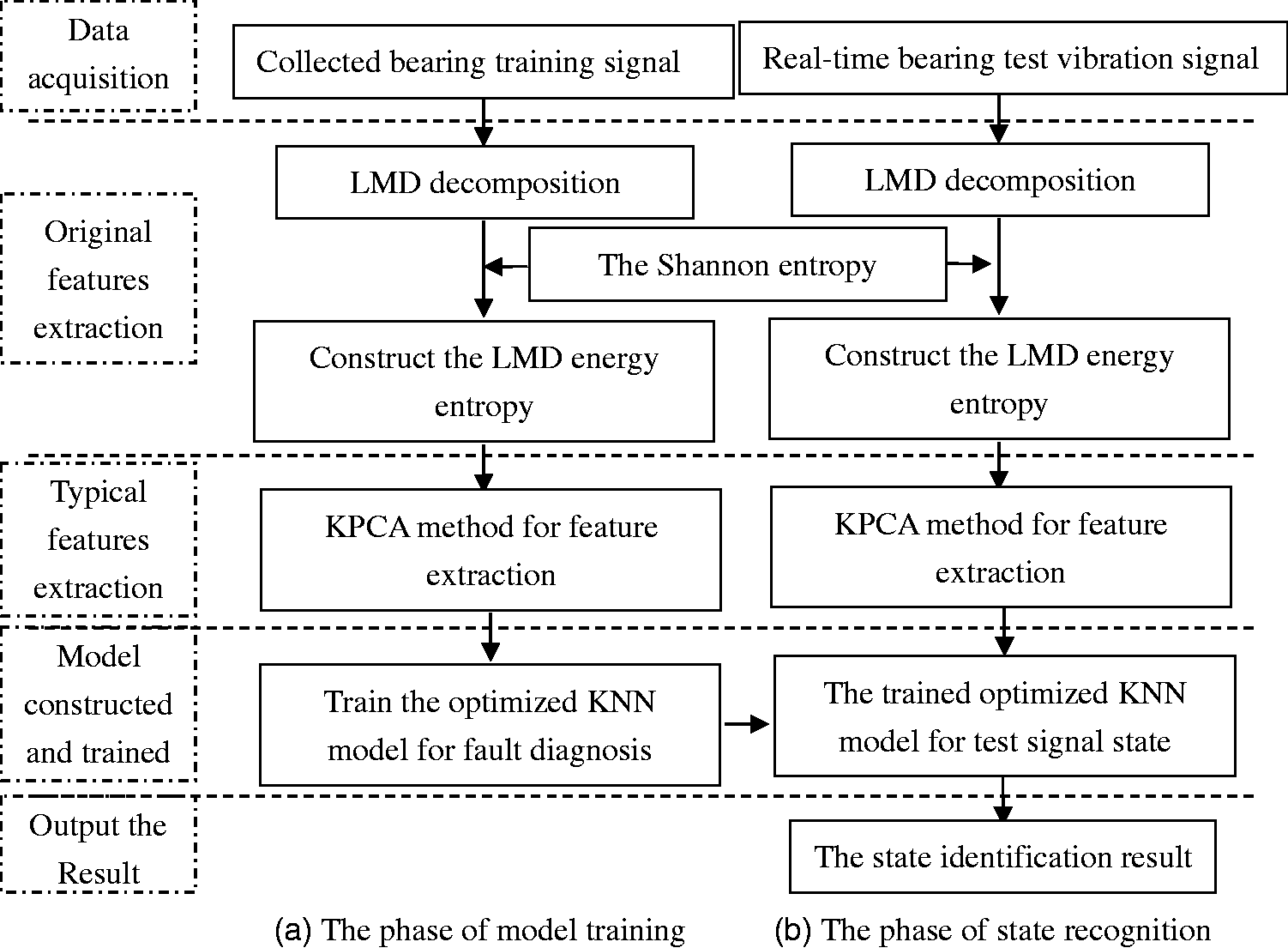
The flowchart of the proposed method.
Features extraction
In this section, the collected vibration signals are processed by the LMD method first. In this method, a complicated signal can be disintegrated into a set of PFs, each of which is the product of an envelope signal and a pure FM signal. Any signal
The nature of LMD is to demodulate the AM–FM signals. By using the LMD method, a complicated signal can be decomposed into a set of PFs, each of which is the product of an envelope signal and a pure FM signal. Furthermore, the complete time–frequency distribution of the original signal can be derived. Any signal Determine all the local extreme points


Use straight lines to connect the two points adjacent to each mean 2. Separate the local mean function

To demodulate 3. Ideally,


where

where the
The single component of the AM–FM signal is given by

The use of equation (7) ensures that, following LMD, data from the original signal are better retained and less data are lost.
Once the

where
Then the KPCA method is used to extract the typical features so as to reduce the recognition error of the KNN model.
In KPCA method, a set of multidimensional signals

where

where
The procedure for the feature extraction method can be described as follows:
Obtain the Shannon energy of the PF components so as to get the typical features of bearing at different running state; Use the KPCA to reduce the dimension of the obtained Shannon entropy features, and the processed features will work as the input of the KNN model.
The optimized KNN model by PSO for features classification
It needs to find the k most adjacent samples for the KNN algorithm, whereas training feature space, to define which features belongs to which category, needs define the adjacent k-nearest features and select for the test features belong to. The KNN method is based on a very small number of adjacent samples in the category decision. Since the KNN method mainly depends on the surrounding neighbouring samples rather than the method for discriminating the class domain, the KNN method is more suitable to achieve the features classification.
The KNN classification process can be defined as follows:
Given the test object, calculate the distance weight from each object Define the nearest k training objects as the subject of the test feature object. The nearest k training objects in the training features is obtained as follows:

where 3. Calculate the weight of the k-nearest objects found in equation (2) and also obtain the weight factor of the test features belonging to the object that has the largest weight factor.
In order to get the KNNs, the PSO is used to quickly find the nearest neighbour of the KNN as follows:


where the subscript ‘
The PSO method is used to speed up the convergence of the KNN algorithm. So as to the k-nearest features of the whole training features. The optimization process of the KNN based on the PSO is as follows:
Generate the whole feature with the dimension is N, generate the number of the particles of Q, for each particle randomly select the k-nearest features within the n-dimensional feature space for the initial KNN of each particle, the iterations number. Calculate the Update the velocity and position of the particle using equations (12) and (13) and obtain some new KNNs of each particle from the n-dimensional feature space. Compare the new If the value of the current particle is better than the value of the overall situation optimum of the particles gbest, then determine gbest as the current particle. Repeat steps 2 to 4 until the stopping criteria or maximum iteration reached; then, the KNN can be obtained, and based on this result, the category of the test features can be judged.
The optimization process of the PSO algorithm is shown in Figure 2.
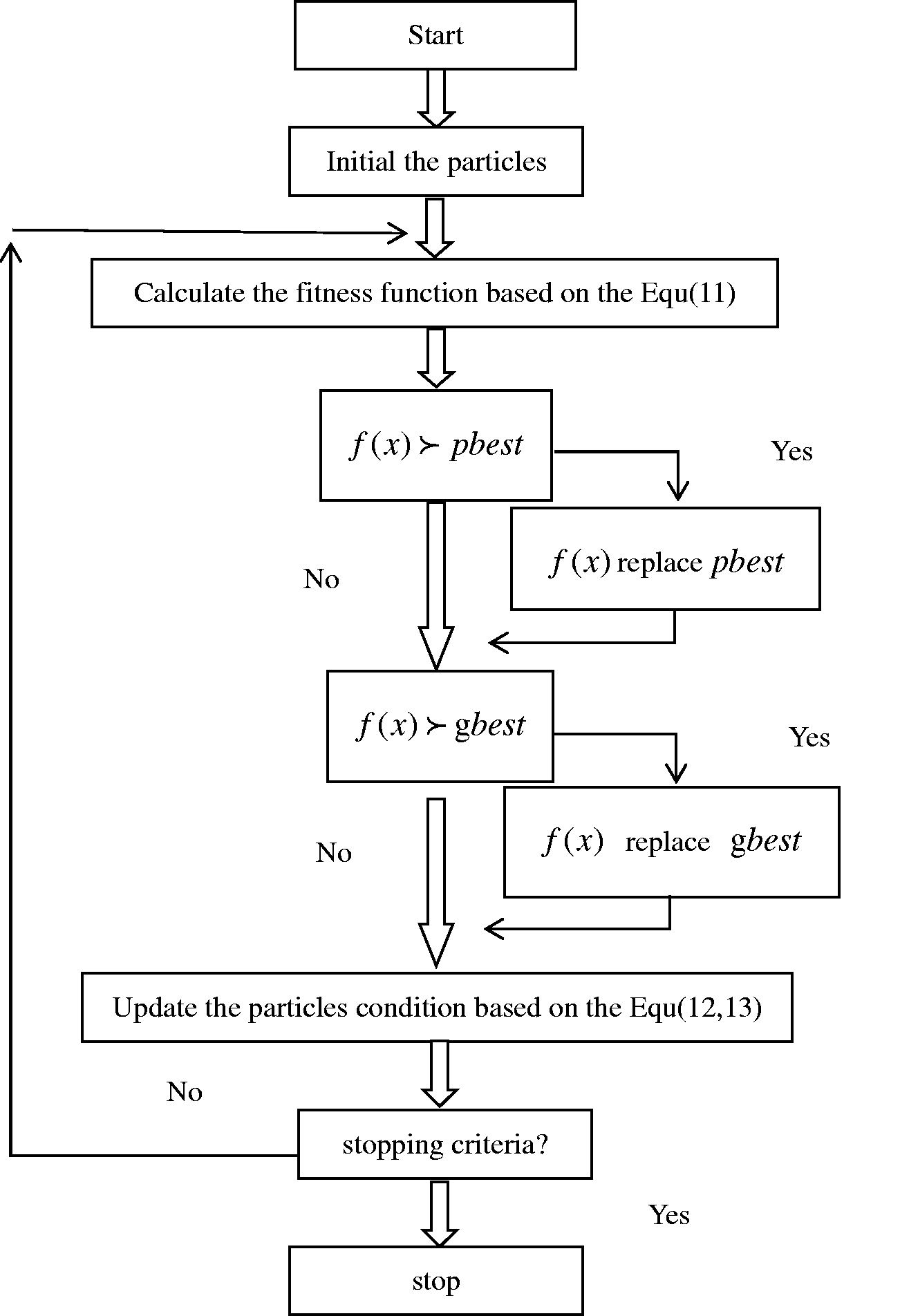
Schematic diagram of the optimization process by PSO.
Validation
Case 1
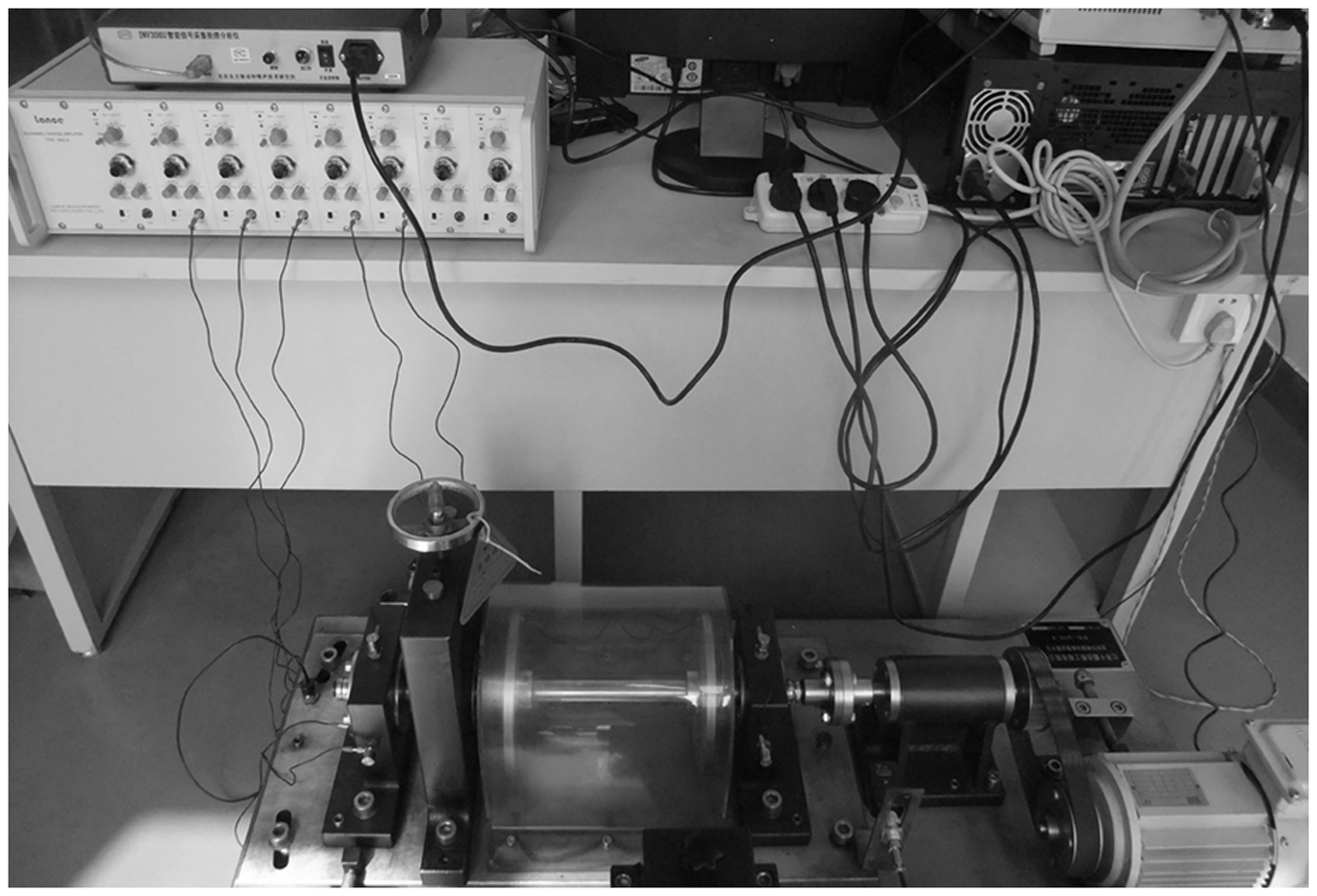
In order to validate the proposed method, a test is done. The proposed method is applied to bearing fault signals obtained from the Case Western Reserve University. 17 The test rig is shown in Figure 3. The bearing type used in the experiments is SKF 6205–2RS JEM. Experiments were conducted by using a 2 HP reliance electric motor. Bearings were seeded with faults by using electro-discharge machining. Fault depth of 0.18 mm, 0.36 mm, 0.53 mm and 0.71 mm were introduced at the inner raceway, rolling element (i.e., ball) and outer raceway. Data were collected for 48,000 samples/s with a motor speed of 1797 r/min. A total of 50 groups of test data of each fault states were selected, with 20 groups for training and the remaining 30 groups for testing. The selected normal bearing and different inner fault type signals are shown in Figure 4.
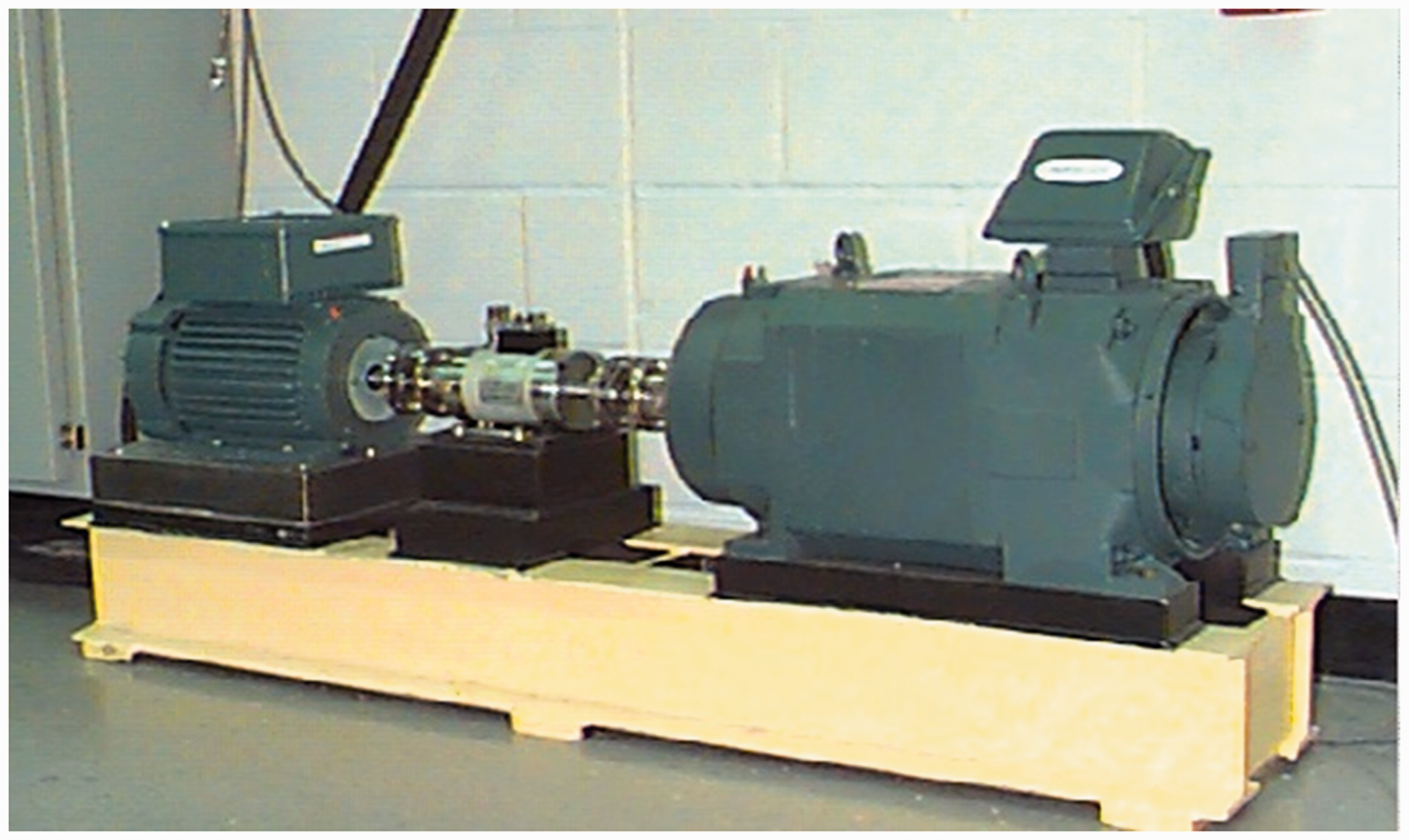
The test rig.
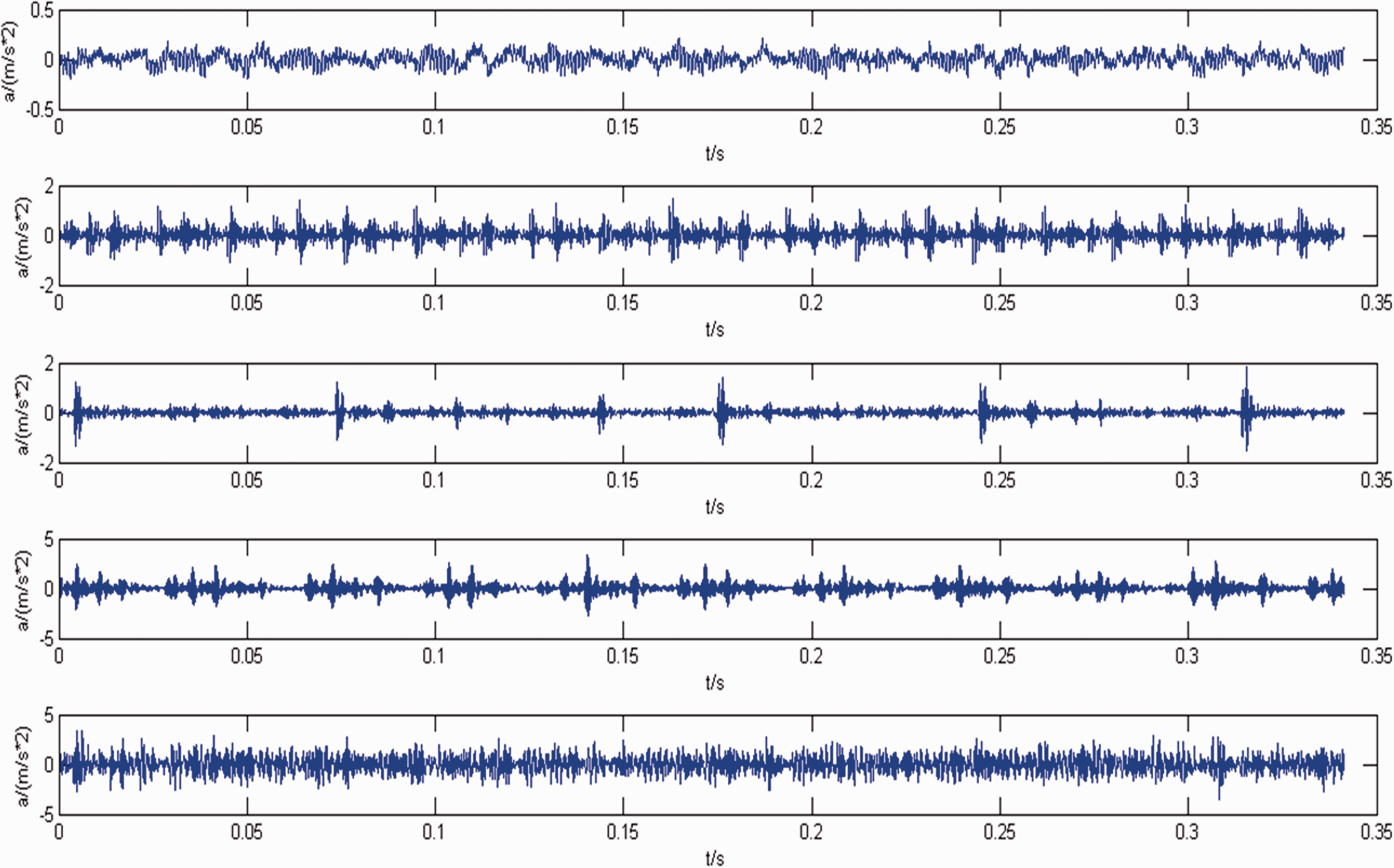
The collected vibration signals.
Then the LMD method is used to decompose the collected signals, the PFs is established based on equation (6), the stop threshold is set as 0.2 and the Shannon entropy is used to calculate the features of the decomposed PFs. A group of 0.71 mm fault signal PFs (decomposed into six PFs) decomposed by LMD is shown in Figure 5.
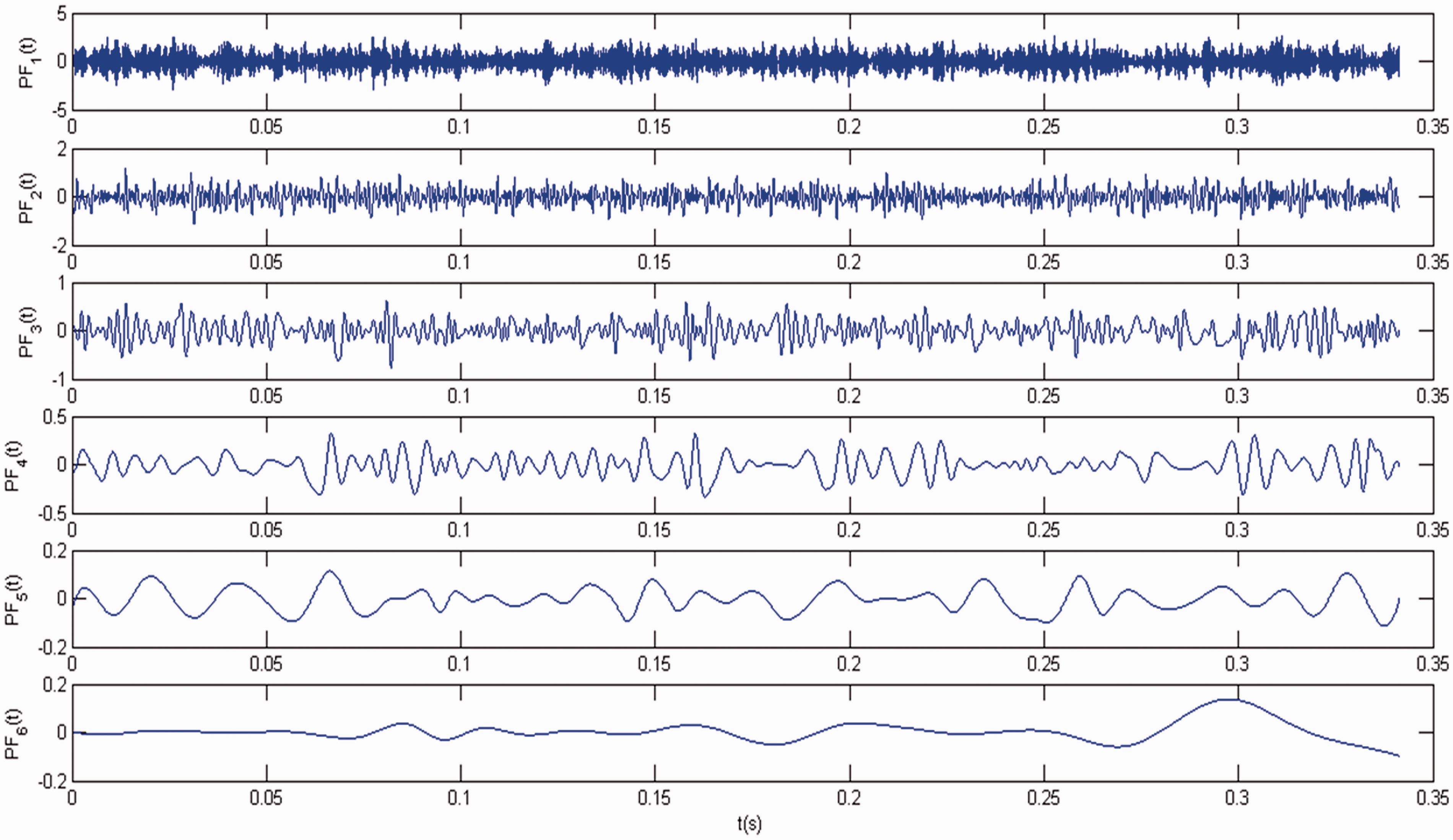
A group of 0.71 mm fault signal PFs (decomposed in 6 PFs) decomposed by LMD.
After the LMD is used to decompose the collected signal, the Shannon entropy is used to extract the features. A group of Shannon entropy obtained as shown in Table 1 (not normalized before).
A group of LMD energy entropy of different running states of the actual signal.

Then the extract Shannon entropy is input into the KPCA (the kernel is radial basis function kernel, and the parameter
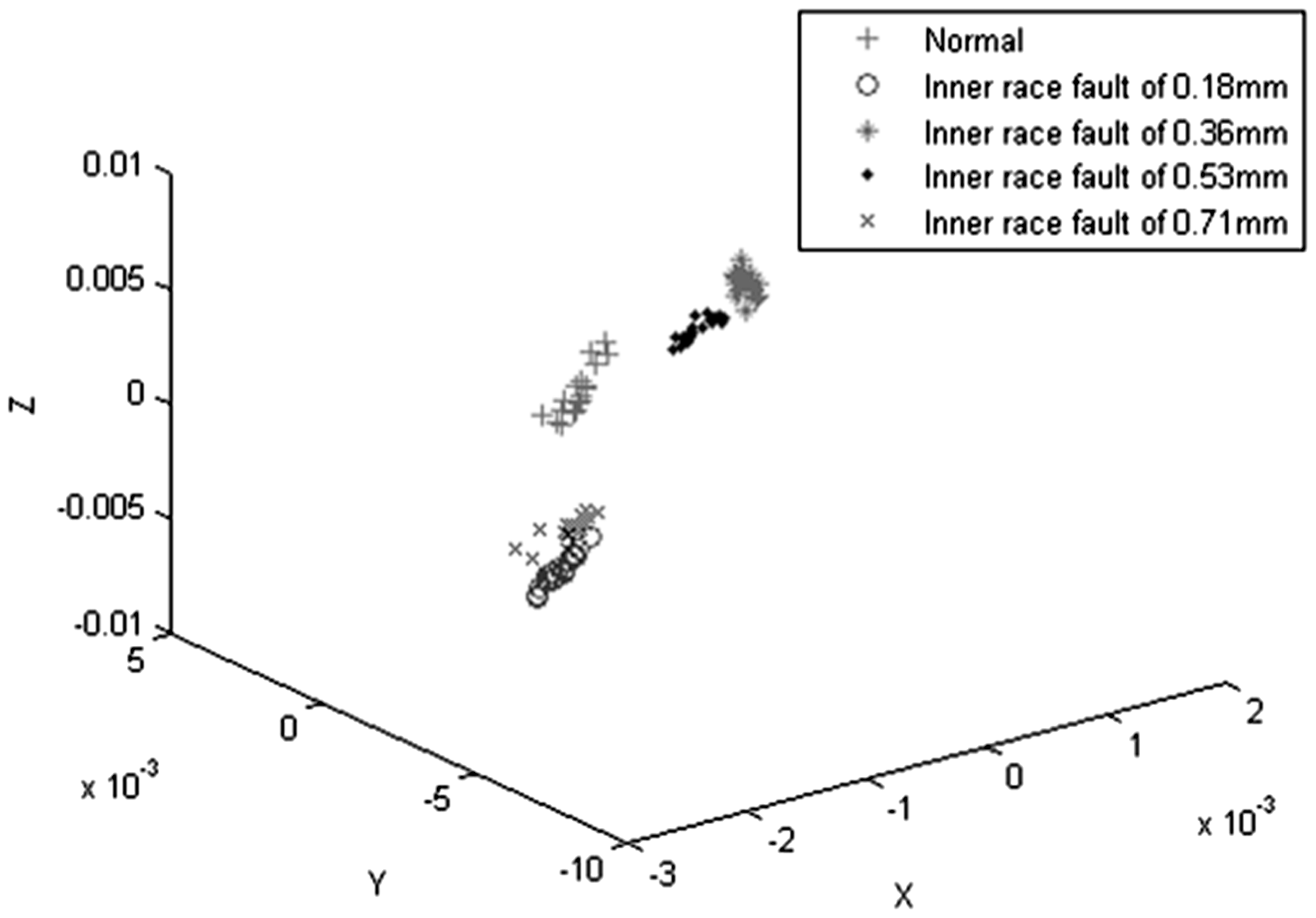
The extract features.
From Figure 6, it can be seen that the features are gathered together, and the fault types can be recognized preliminary; however, the features are still mixed together. For example, the inner race faults of 0.33 mm and 0.53 mm will cause the fault diagnosis for different types.
The PSO is used to optimize the KNN model. The PSO parameters are set as follows: the number of particles is set to 100, the velocity of the particles is set to between 0 and 1, the terminal interaction time
The comparison result of using the PSO for KNN convergence.

KNN: k-nearest neighbour model; GA: genetic algorithms; PSO: particle swarm optimization.
In order to test the fault identify effort of the proposed method, some comparisons are done, as given below:
The fault diagnosis method is based on the LMD method, the multi-scale fuzzy entropy is used to extract the features, and the features are input into the improved SVM model.
8
The LMD-SVD model is used to extract the features, and the ELM model is used to achieve the fault diagnosis.
18
The LMD method is used to decompose the signal and the permutation entropy to extract the features; the Laplacian score algorithm is used to reduce the dimension of the features and then the features are input into the improved SVM.
19
The EEMD method is used to decompose the signal, and the AR parameters worked as the features; the KPCA is used to reduce the dimension of the features and the PSO-optimized SVM model is used to work as the fault identify model.
20
The proposed method in this research.
The comparison results are shown in Table 3.
The recognition rate of different methods.
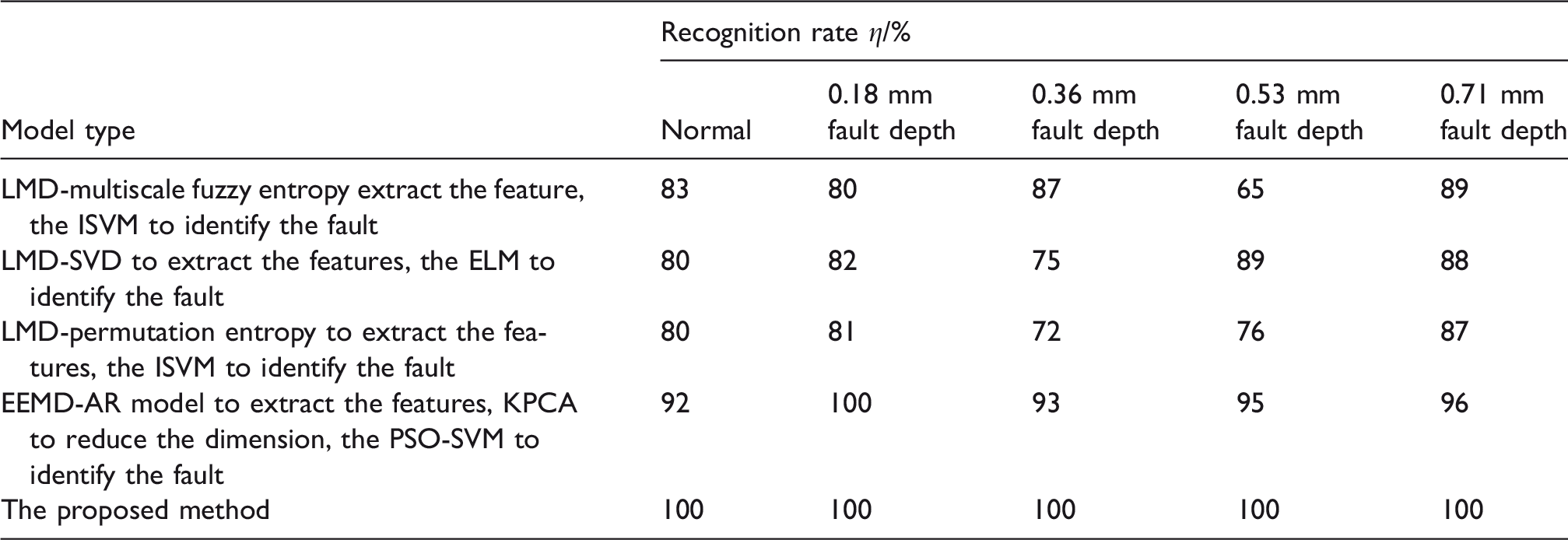
LMD: local mean decomposition; SVD: singular value decomposition; ELM: extreme learning machine; ISVM: improved support vector machine; EEMD-AR: ensemble empirical mode decomposition- autoregressive model; KPCA: kernel principal component analysis; PSO: particle swarm optimization; SVM: support vector machine.
From Table 3, we note that the methods proposed in this research have some inadequacy in identifying the bearing fault types: error exists even in the method of EEMD-AR model to extract the features, KPCA to reduce the dimension, the PSO-SVM to identify the fault and also to get a better result of fault identify rate. This is because the features extraction and dimension reduction are important to the fault identify model, and in the proposed method of this research, the typical features are extract and the fault identify model are optimized by the PSO method, so the errors are eliminated, and this proved the effectiveness of this method.
Case 2
The actual test is done to validate the proposed method: the shaft driven by AC motor. The rotation speed is kept at 1000 r/min; a radial load of 3 kg is added to the bearing. The data sampling rate is 25,600 Hz and the data length is 102,400 collected points; the test rig is shown in Figure 7. The bearings are hosted on the shaft. Every 2 h, the vibration data are collected once. The bearing is run for one year. Then a set of data from the start, half year and one year are selected. The selected vibration signals of a different running state are shown in Figure 8. The data sets are used to test whether the proposed method can identify the bearing running state; 4096 data points are selected to analyse, and 20 groups of collected data of different faults are obtained, with 10 groups for training and the remaining 10 groups for testing.
The test rig.
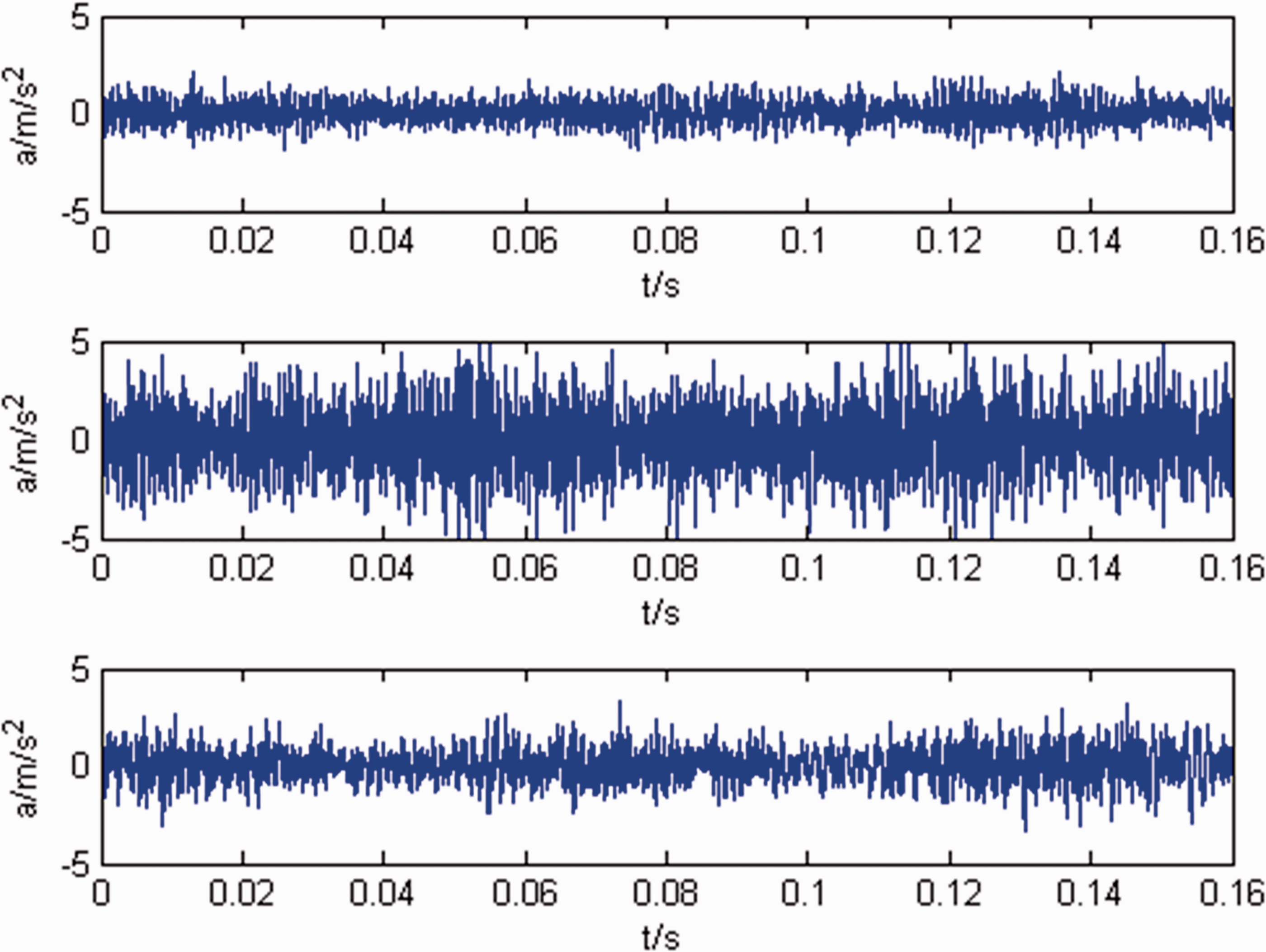
The collected vibration signals of a different running station.
Then, the LMD method is used to decompose the signal and the Shannon entropy is used to calculate the features of the decomposed PFs by the LMD; the KPCA is used to extract the features.
The PSO-optimized KNN model is used to achieve the bearing running fault identify (the number of particles is set to 200, the velocity of the particles is set to between 0 and 1, the k is set to 3, the terminal interaction time
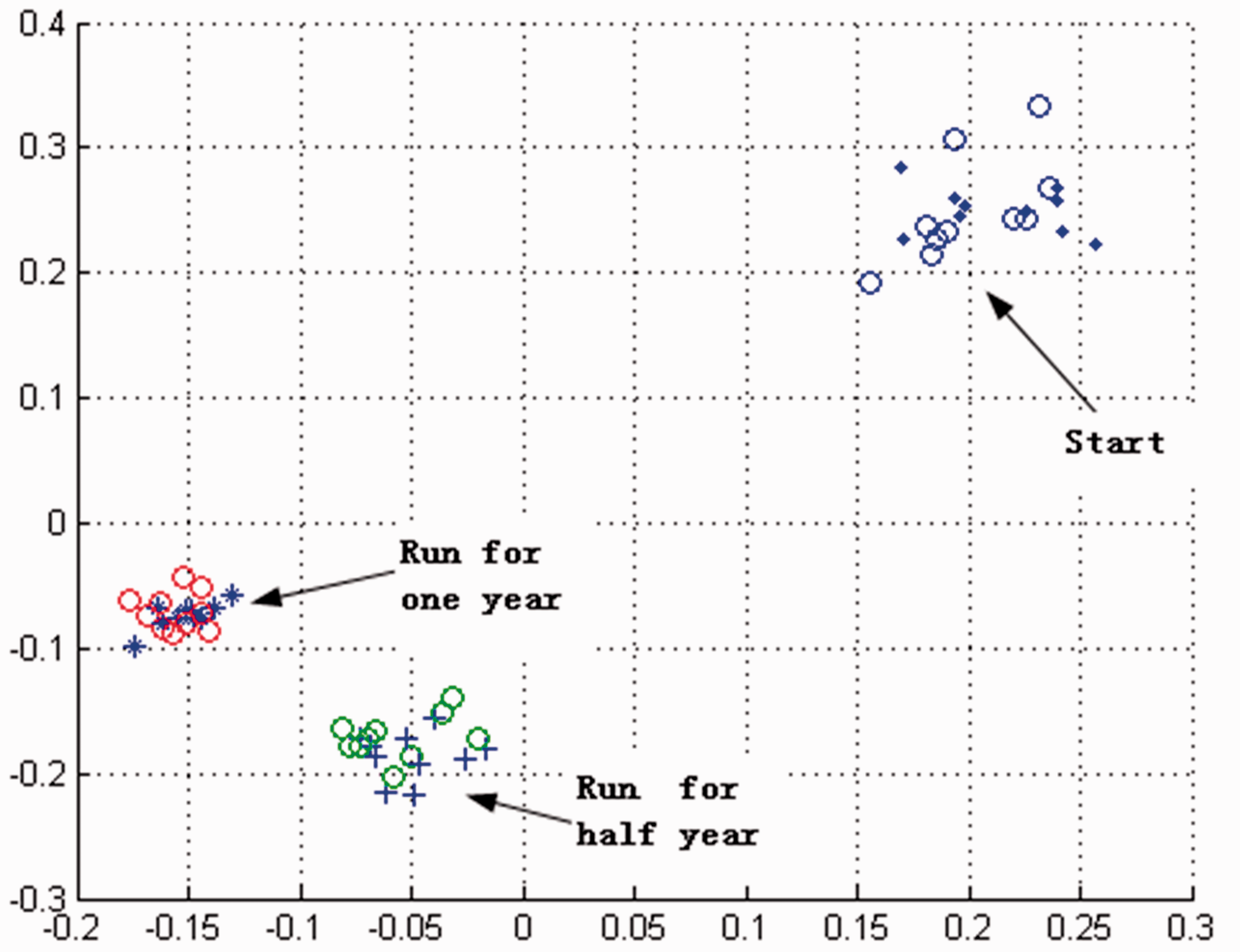
The recognition result of the proposed method for the actual test data.
From Figure 9, we see that the proposed method can recognize the bearing running state easily. And the bearing running conditions of start running, running for a half year, and running for one year are separate and have been recognized directly.
Conclusions
The time–frequency domain method LMD is used to decompose the signal especially for the modulated signal because of the different bearing running faults, and the Shannon entropy of the decomposed PFs are used to work as the original features extracted from the mass vibration data. In addition, the features fusion technique KPCA is used to fusion the original features and reduce the dimension so as to reduce the original features dimension. The PSO-optimized KNN model is used to achieve bearing fault diagnosis. The proposed approach is validated by real-world vibration signals. The results show the effectiveness of the proposed method. This research gives an example of combined approaches for the bearing fault diagnosis.
The LMD method is used for dealing with the modulated signal, and the Shannon entropy is used mainly for dealing with the uncertain features of early faults; and once the signal is processed, the KPCA is used to extract the typical features—all the methods together can identify higher accuracy.
Footnotes
Acknowledgments
The authors are grateful to the anonymous reviewers for their helpful comments and constructive suggestions.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research is supported by the National Natural Science Foundation of China (No.51775072, 51375519), Chongqing Research Key Program of Basic Research and Frontier Technology (cstc2015jcyjBX0140), the Scientific Research Fund of Chongqing Municipal Education Commission (No. KJ1500529, KJ1600519), Chongqing Research Program of Basic Research and Frontier Technology (cstc2017jcyjA1658, cstc2016jcyjA0526).Chongqing Postdoctoral Science Foundation Funded Project (No. xm2015011).