
Abstract
A two-degree-of-freedom nonlinear vibration system of a quarter vehicle suspension system is studied by using the feedback control method considered the fractional-order derivative damping. The nonlinear dynamic model of two-degree-of-freedom vehicle suspension system is built and linear velocity and displacement controllers are used to control the nonlinear vibration of the vehicle suspension system. A case of the 1:1 internal resonance is considered. The amplitude–frequency response is obtained with the multiscale method. The asymptotic stability conditions of the nonlinear system can be gotten by using the Routh–Hurwitz criterion and the ranges of control parameters are gained in the condition of stable solutions to the system. The simulation results show that the feedback control can effectively reduce the amplitude of primary resonance, weaken or even eliminate the nonlinear vibration characteristics of the suspension system. Fractional orders have an impact on control performance, which should be considered in the control problem. The study will provide a theoretical basis and reference for the optimal design of the vehicle suspension system.
Introduction
Fractional calculus deals with integration and differentiation of arbitrary real order. It has been used to solve problems in different areas of physics and engineering, such as the problems on viscoelasticity, heat conduction in materials with memory, electrodynamics with memory, and nonlinear conservation laws. It is very suitable for the fractional calculus to describe the constitutive relationship of materials with frequency-dependent damping behaviors. The nonlinear suspension system containing fractional characteristics is complicated in the practical work. The control method based on the linear system has been difficult to achieve the ideal control effect.
The dynamical behaviors of nonlinear vibration system involving fractional derivatives have been widely studied by using analytical methods. The finite Fourier cosine and Laplace transforms were used to study the unsteady flow of viscoelastic fluid with the fractional-order derivative Maxwell model. 1 The nonlinear vibration of autonomous, nonautonomous, or delay systems with fractional derivative damping was analyzed by using a residue harmonic balance method.2–4 Kovacic and Zukovic 5 and Shen et al. 6 studied the nonlinear vibration system with fractional derivative damping by using the averaging method. The multiple scale method was used to discuss vibrations of nonlinear oscillators with fractional derivative damping.7,8
Fractional-order systems have been widely used in active control systems. Some researchers have paid their attention to the application of fractional-order controllers.9–12 Aghababa 13 has investigated the existence of chaos in a fractional-order micro-electro-mechanical resonator and has proposed a fractional controller for the chaos suppression problem. Several alternative new methods were used to control power electronic converters based on the use of fractional order.14,15 Fractional-order disturbance observers have been introduced for the vibration suppression problem.16,17 Fractional-order filters were shown to considerably improve the results for both the artificially generated ground motions and previously recorded earthquake data. 18 Wang and Zheng 19 have investigated the performance of fractional-order difference feedback to improve the stability of a single-degree-of-freedom vibration system. They have found that some fractional-order difference integrators/differentiators can enhance the stability of the system and bring better results than classical ones. The fractional-order controller is more flexible and achieves better control effect and performance than the integer-order controller. 20
In recent years, active control of vibration has become a hot subject of research. A fuzzy logic controller has been designed for active vibration control of a graphite/epoxy composite cantilever beam using nonlinear piezoelectric actuators. 21 An AVC system with distributed disturbances was developed using genetic algorithms. 22 Xu et al. 23 studied the possibility of using active piezoelectric moment controllers to reduce seismic response of a machinery building on the top of ship lift towers. Yazici et al. 24 studied the design of a state-feedback delay-dependent H∞ controller for vibration attenuation problem of a seismic-excited container crane. An optimal control method was provided to mitigate the strong cubic nonlinear vibration of vehicle suspension with velocity and displacement feedback controllers.25,26 An optimal delayed feedback control methodology was developed to mitigate the primary and superharmonic resonances of a flexible simply-simply supported beam with a piezoelectric sensor and actuator. 27 Moon et al. 28 have designed a sliding mode controller for active control of cable-stayed bridges subjected to seismic excitation. The response of an off-shore structure under random ocean waves has been controlled using a modified probabilistic neural network. 29 The research mentioned above is concerned with the selection of feedback gain, which can enhance the control performance of nonlinear systems or change the position of the bifurcation point. However, all these papers failed to discuss how to choose control parameters for TDOF vibration system.
There are two purposes to present this work. First, the nonlinear dynamic model of TDOF vehicle suspension system is built and linear velocity and displacement controllers are used to control the nonlinear vibration of the vehicle suspension system. The primary resonance response of the two-degree-of-freedom vehicle suspension system with fractional-order difference is studied with the averaging method. Second, the sufficient condition of guaranteeing the system stability is studied and the ranges of the stable feedback control parameters are obtained. It is found that the value of the fractional order has an obvious effect on the control performance.
Dynamic model of the TDOF nonlinear suspension system with fractional order.
A TDOF quarter-car model with fractional order is studied as shown in Figure 1. m1 and m2 are the quality of the vehicle body and the wheels, respectively. c is the damping coefficient of the suspension system. k1 and k2 are the stiffness coefficients of the suspension system and the wheels, respectively. The formula Model of a two-degree-of-freedom quarter-car vehicle with fractional-order derivative damping.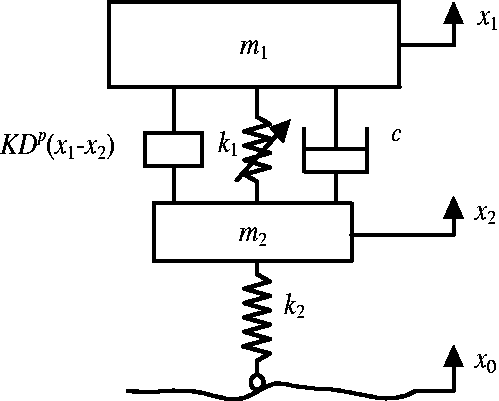
The equation of motion of the system is given by


Setting


Introducing the linear controllers with the displacement and velocity feedback gains gu and gv, equations (3) and (4) can be transformed into


Analysis using method of multiple scales
For the case of the 1:1 internal resonance, the approximate solutions to equations (5) and (6) can be expressed as


By differentiating equations (7) and (8) to t, one could obtain


Substituting equations (7) to (10) into equations (5) and (6), we can get




From equations (11) and (12), and by solving the system of equations with


Moreover, one could apply the standard averaging method to equations (13) and (14) in time interval


Based on the averaging method, one could select the upper limit of the integral T as T = 2π if




Stability analysis of the motion and its optimal control
In the mechanical engineering, it is of great importance to guarantee the motion stability in the equilibrium point for the vibration control system. The amplitude
Take the vehicle suspension system shown in Figure 1 as the simulation model, where m1 = 240 kg, m2 = 36 kg, k1 = 16,000 N/m, k2 = 160,000 N/m, c = 250 N s/m, A = 0.05 m, ɛ = 0.4, K = 500, and p = 0.5.
The motion of the vibration system is indicated by its equations of motion, of which one solution determines a motion state of the system and one periodic solution corresponds to a periodic motion. In the periodic motion, the equilibrium point is an exceptional case. Hence, the study of stability problem comes down to the stability of the periodic solution.28–30 To determine the solution stability, a perturbation is given to the system as

Substituting equation (21) into equations (17) to (20), and linearizing equations (17) to (20), we can have the differential equations with respect to the disturbance quantity

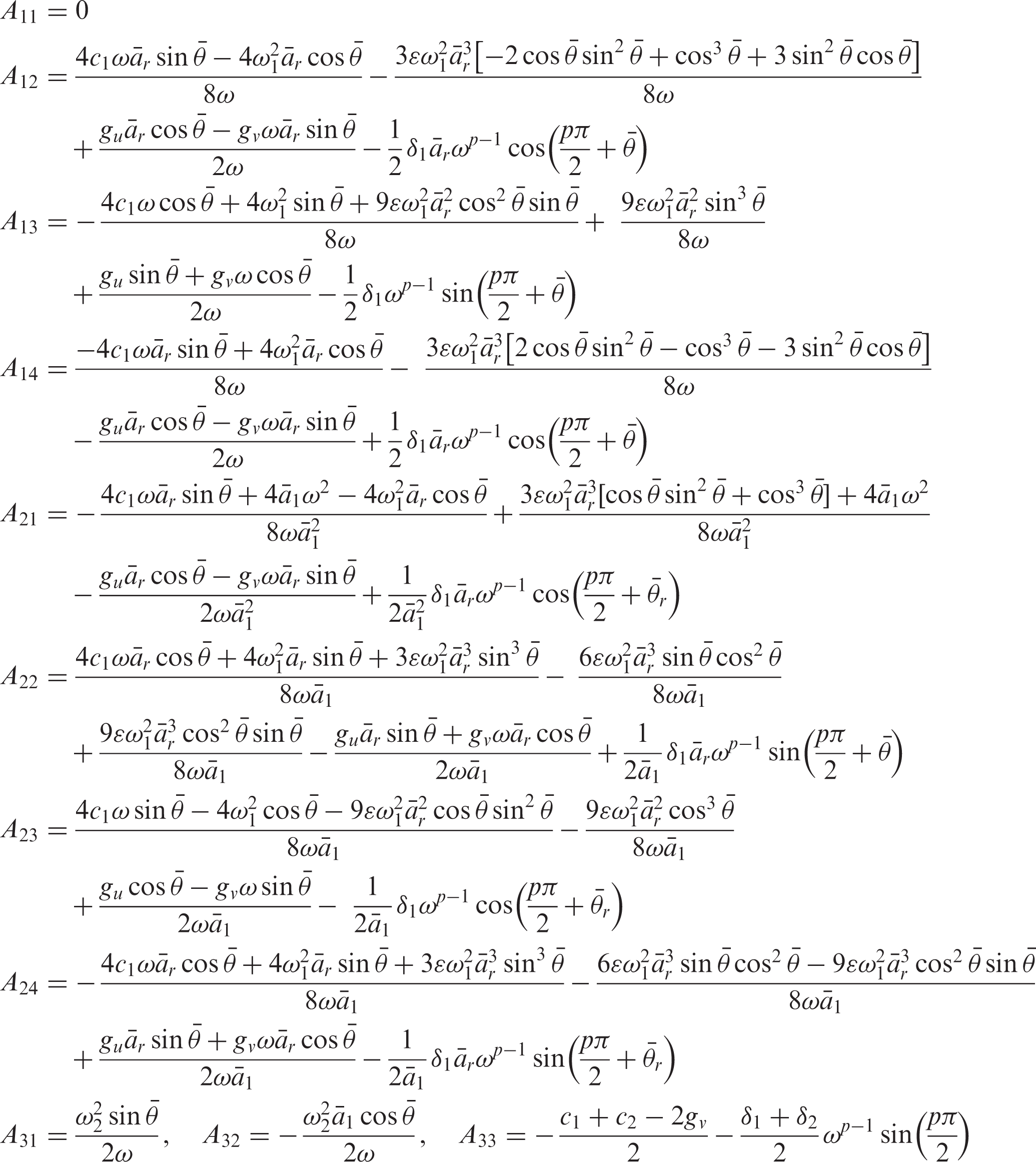

Introducing the aforementioned Jacobian matrix

We can have the asymptotic stability conditions guaranteeing the motion of the system based on Routh–Hurwitz criterion, that is

Besides, the condition of static bifurcation is obtained

And conditions of Hopf bifurcation are given by

The stability conditions of the solutions to equation (23) is that the characteristic roots of the eigenvalue equation all have a negative real part, and the solution stability of equation (23) can be affected if only one of the characteristic root has a positive real part. The change in plus-minus in the real part of characteristic roots may bring with it the phenomenon of saddle-node bifurcation as well as multiple solutions. The change in plus-minus in the real part of a pair of complex roots may lead to the Hopf bifurcation phenomena, further the periodic motion of the system and potentiality for other more complex motions.
Moreover, we can obtain the ranges of linear control parameters gu and gv under the conditions guaranteeing the system stability. The range of the stable feedback gains can be calculated by the constrained conditions.
Simulation analysis
In the aforementioned analysis, the single-frequency harmonic excitation of road surface is taken for example, the amplitude–frequency response is obtained with averaging technique, and stability of the vehicle body vertical displacement is analyzed. To depict the vibration control performances with different control parameters and to verify the impact of fractional-order coefficients on the vibration amplitude, different sets of control parameters, fractional-order coefficients are employed to study the varying of vibration amplitude of the suspension system. With the procedure complexity considered, MATLAB is utilized in the following part to numerically simulate the single-frequency harmonic excitation of road surface.
A set of state variables is selected
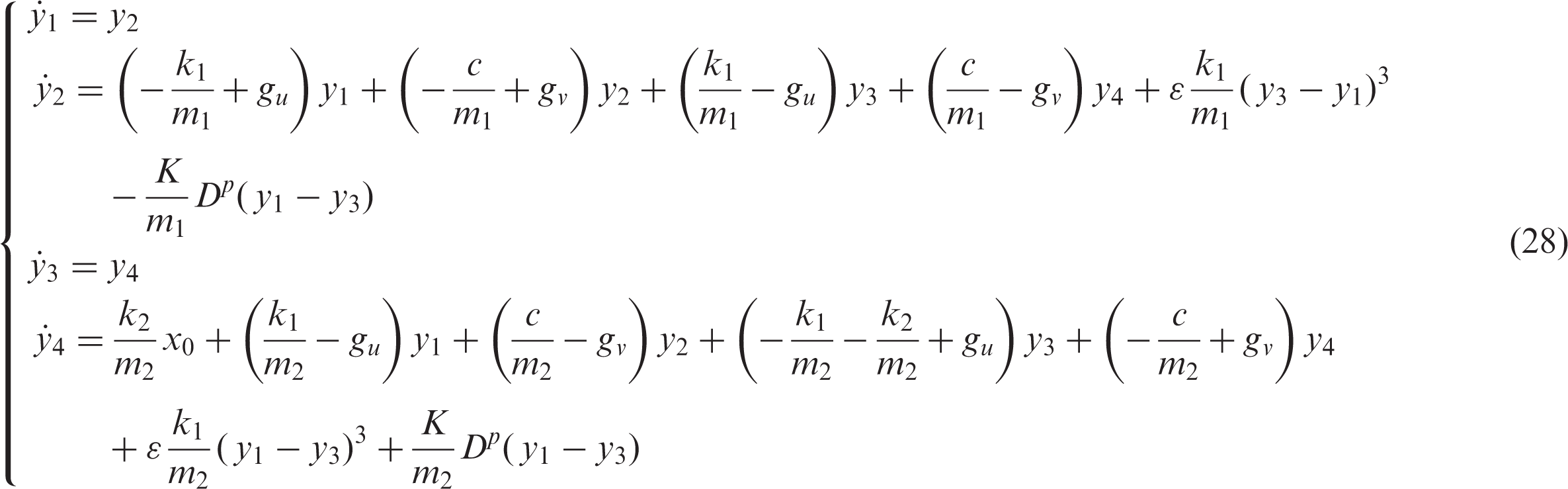
Equation (27) can be expressed as
Solution of the fractional-order differential equation
We can regard the numerical solution to the fractional-order differential equation as the integral-order differential fitting. The approximation to the method of fractional-order differential filter proposed is utilized.
31
Assuming the frequency range from ωb to ωh, we can have the corresponding filter equation given by

As the inner structure shown in Figure 2, approximation solution module package with fractional order is constructed by Simulink module encapsulation. The module Transfer Fcn1 presents a low-pass filter with its wideband defined as ωh, which can avoid the emergence of algebraic loop in the simulation process. The parameters with fractional-order differential can be set in the simulation module.
The fractional-order filter.
Simulation of single-frequency harmonic excitation of road surface
The time–domain response curves of vehicle displacement are obtained from the suspension system with single-frequency harmonic excitation written as x0 = 0.05cos(10 t) m. The initial values of displacement and velocity are both set to 0.
Figure 3 depicts the time–domain response curves of the vertical displacement of the vehicle body controlled by different sets of displacement feedback gains, when the fractional order Time–domain response curves of the vehicle body by displacement control.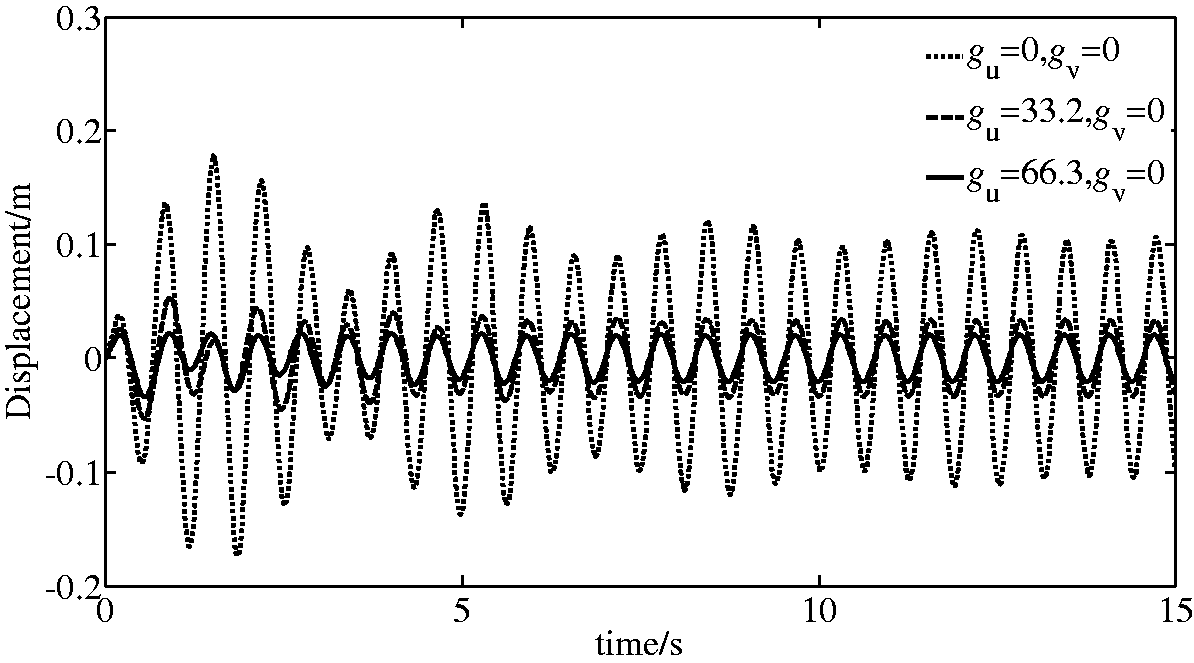
Figure 4 depicts the time–domain response curves of the vertical displacement of the vehicle body controlled by different sets of velocity feedback gains, in which the fractional order p =0.5 and fractional-order coefficient K = 500. The velocity feedback gains satisfy the conditions of stability of the vibration system. The amplitude of the vehicle body is reduced along with the velocity feedback gains, which mainly reflects that a larger gv leads to a smaller vibration amplitude. In other words, when gu = 0, the amplitude will be reduced and the vibration will tend to stability with the value of gv increased.
Time–domain response curves of vehicle body of the vehicle body by velocity control.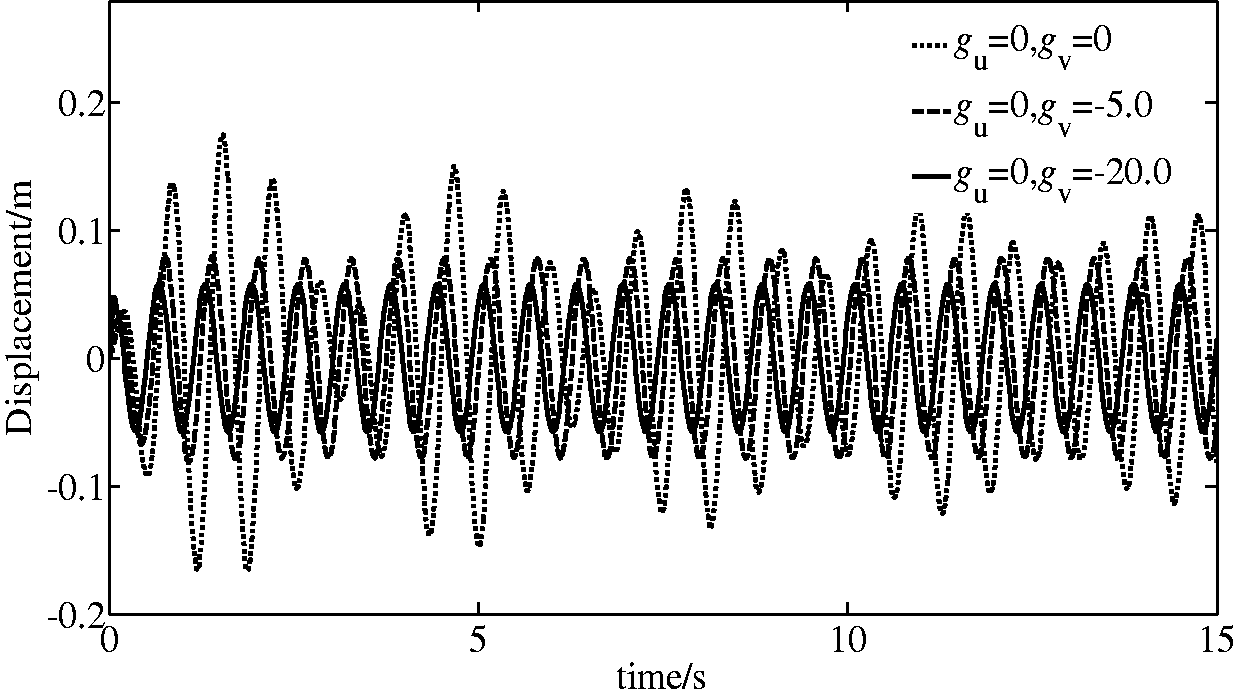
Figure 5 presents the influence of the fractional differential order on the vertical displacement of vehicle body with and without control parameters. As depicted in Figure 5, an increase in the fractional order p leads to a decrease in the amplitude. Hence, the resonance response of the nonlinear oscillator can be reduced by choosing the suitable fractional order p of the controllers.
Time–domain response curves of vehicle displacement for three sets of fractional orders without control.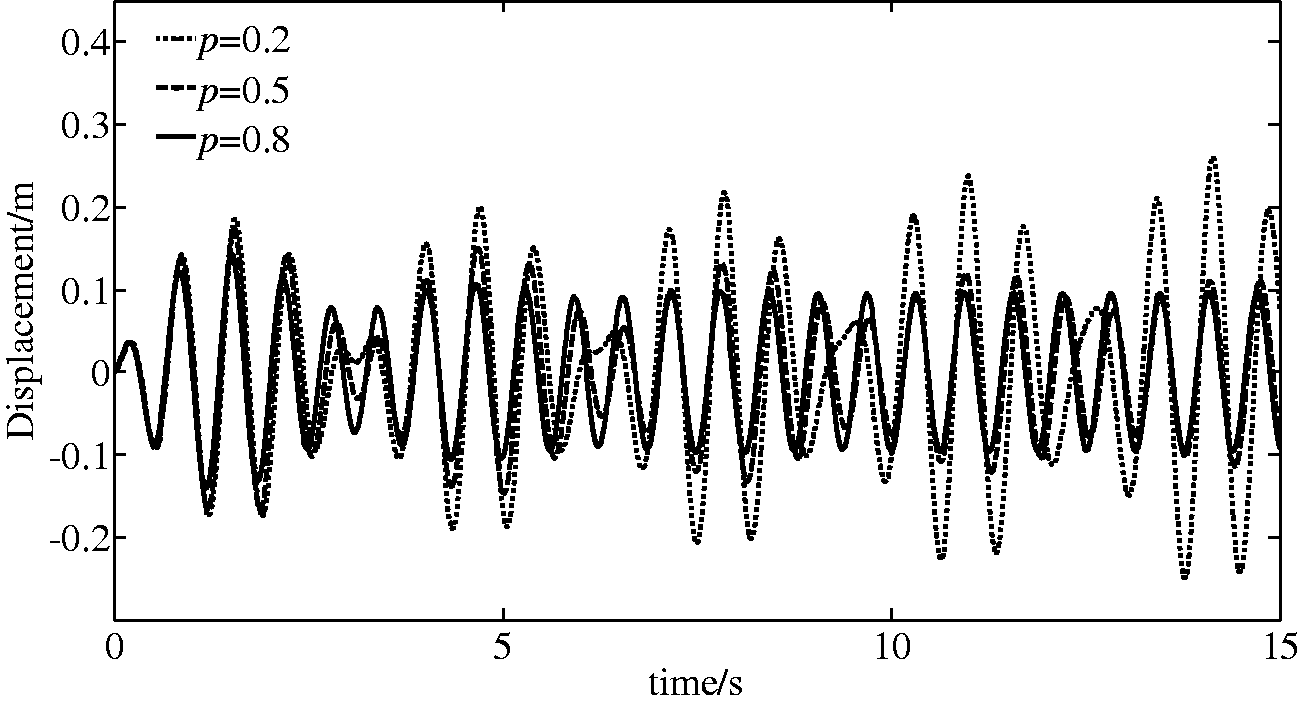
Figure 6 presents the impact of the fractional-order coefficient K on the time–domain response of vertical displacement with and without control parameters, which indicates a similar result to Figure 5, that is the amplitude and frequency of the vertical displacement are also impacted by the fractional-order differential coefficient. The larger the value of K is, the smaller the amplitude will be. Hence, the resonance response of the nonlinear oscillator can be reduced, when the suitable differential coefficient K is found.
Time–domain response curves of vehicle body for three sets of fractional-order coefficients without control.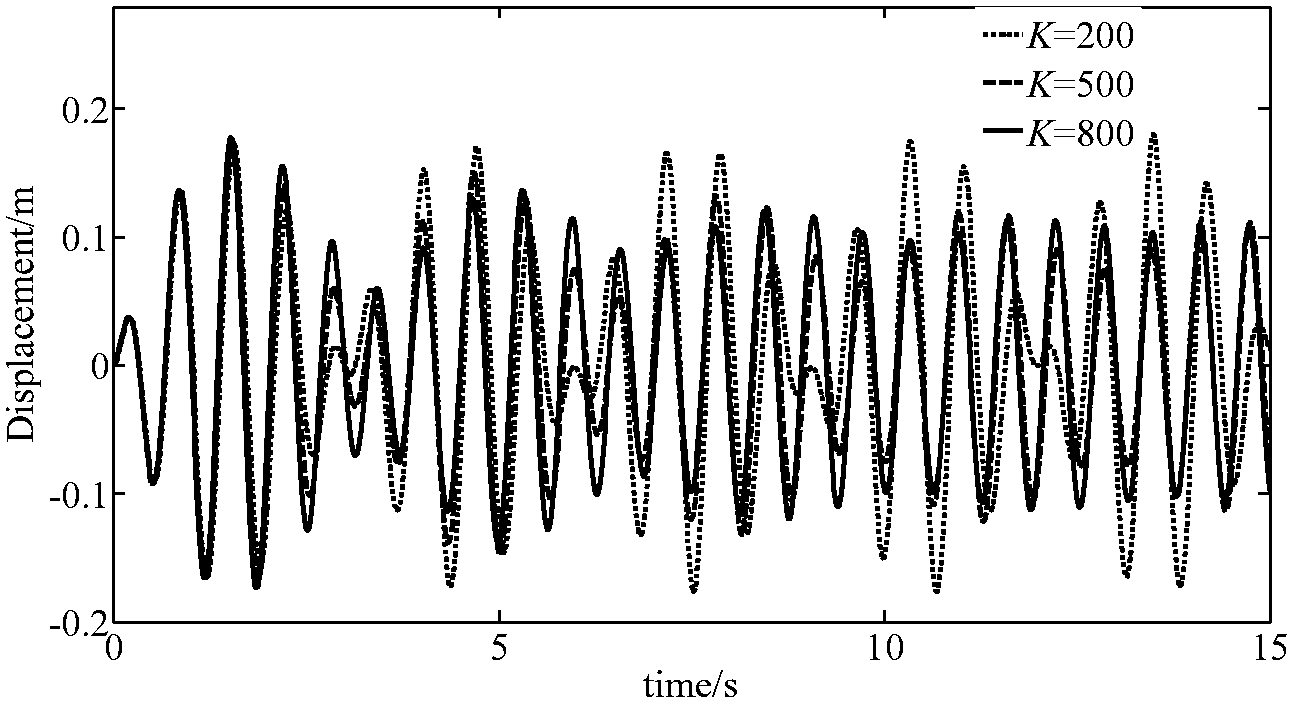
Figure 7 depicts the time–domain response curves of the vertical displacement of the vehicle body controlled by different sets of displacement and velocity control parameters, in which the fractional order Time–domain response curves of vehicle displacement with displacement and velocity control.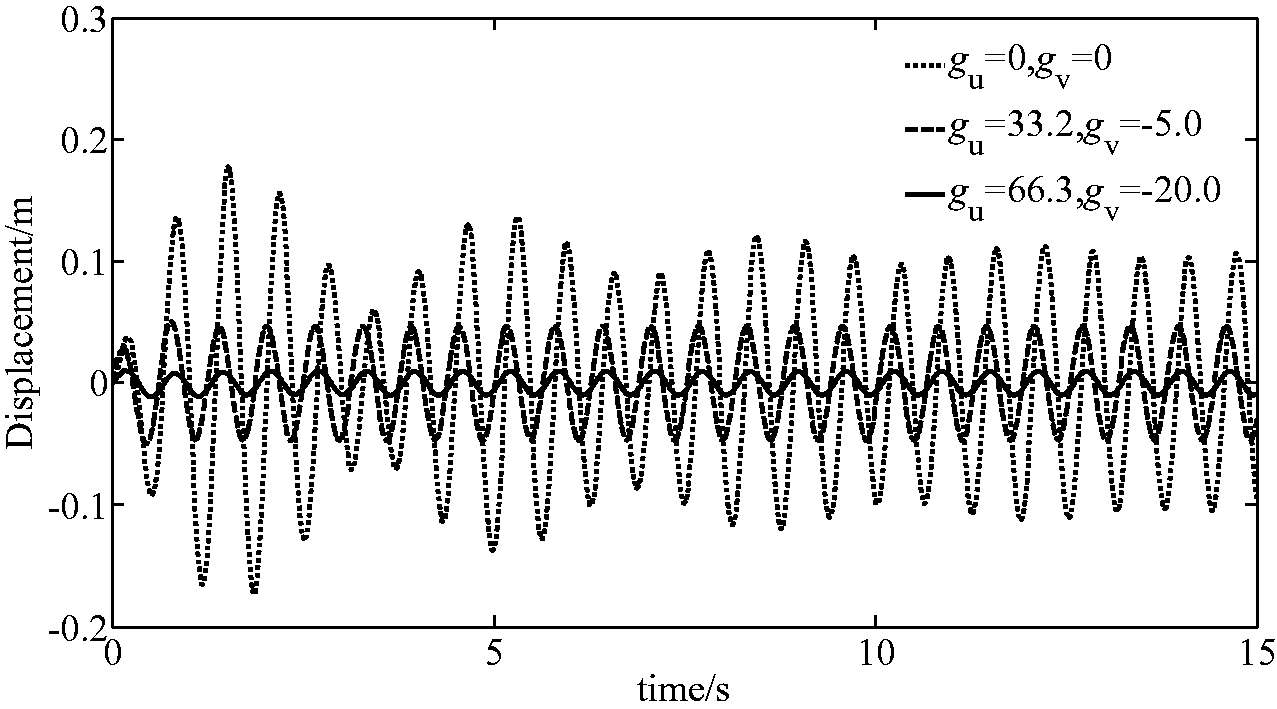
Conclusions
The model of the TDOF nonlinear suspension system is built by considering the fractional-order differentiation. The approximate solution is studied with the averaging method. The model stability is analyzed. Simulation analysis is carried out under single-frequency and stochastic excitation of the road surface by using a MATLAB simulation model of the nonlinear suspension system with linear control parameters.
Controlled by the displacement and velocity feedback gains, the amplitude of the vehicle body is decreased. The increase in the fractional order p leads to the decrease in the amplitude. A larger value of K leads to the decrease in the amplitude. In the case of single-frequency excitation of road surface, the vibration amplitude of the vehicle body can be effectively reduced with an integrated influence of control parameters, fractional order, and fractional-order coefficients.
The range of linear control parameters gu and gv can be obtained, which can guarantee the system stability. The range of the stable feedback gains can be calculated by the constrained conditions.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.