
Abstract
In recent years, the investigation of friction noise which using to predict the wear has gained increasing attention within the field of tribology. In a wide variety of industries, the wear of mechanical components is a matter of major concern, as it directly affects the working life of machinery and equipment such as brake systems and high-speed running machines. Numerous earlier studies, using mathematical, analytical, and finite element methods (FEM), have proposed various hypotheses concerning contact dynamics and friction surface characteristics with the goal of modeling the contact mechanisms. Modelling mechanical contact with rough surfaces poses significant challenges. This study emphasizes the need for advanced modelling techniques by revealing the limitations of existing models in accurately predicting wear, friction, and frictional noise. The analysis highlights the importance of linking friction, wear, and noise in both dry and lubricated conditions, and underscores the necessity of addressing current gaps to develop more precise wear prediction methods based on noise generation in industrial applications. This paper is to review prominent existing models, exploring their approaches to noise generation from friction and its subsequent effect on surface wear. The paper aims to identify key limitations and challenges in accurately modelling these interdependencies. While previous research has often focused on wear caused by friction between surfaces, there is a notable gap in understanding the relationships between frictional noise, friction coefficient, surface roughness, and wear under sliding contact. Current models still face limitations, such as the influence of lubricants.
Keywords
Introduction
The working life of machines and equipment is compromised by wear, requiring costly repairs and replacements. An important factor influencing the wear processes is the friction between working surfaces, which are always rough to an extent and may be damaged. The friction will be affected by mechanical features such as the forms/shapes of the contacting surfaces, the materials of the surfaces, their roughness and type and size of the applied load.1–7 Surface contact and unbalanced load can generate vibrations and noise with many harmonic components and, therefore, understanding harmonic components is essential for ensuring the reliability, efficiency, and safety of mechanical systems. In the past, these processes were closely checked using the noise emitted at the contact point as computed by the Boundary Element Method, which was, and is, computationally costly.8–10 These costs can be reduced by adopting partial calculations which focus on the dominant harmonic elements instead of the entire spectrum.11–13
Analyzing the noise emitted from mechanical systems can be a way to detect and/or diagnose the presence of faulty components.14–17 Wear failure is a common and unavoidable failure mode, influenced by factors such as tribo-system characteristics and operational circumstances,7,18 Acoustic emission (AE) techniques, which sample AE elastic waves using piezoelectric sensors and analyses them with digital processing methods, have been used extensively and successfully in machine condition monitoring and mechanical engineering.10,19 Such techniques can detect stress changes caused by asperity contact and potentially provide indicators that correlate with tribological states and wear rate.20,21 a technique that detects alterations in the condition of the point of contact mechanisms could be used to calculate the wear rate. When two materials come into contact, deterioration and the accompanying noise are unavoidable.22,23 AE techniques may be used to detect signals generated by rough contact between the asperities of the two surfaces and could, potentially, monitor the contact mechanism and predict the wear rate.7,20,21 Thus, examining the AE signal produced could result in a plausible method for detecting a faulty mechanical system.24–28
Early attempts to relate noise measurements, especially acoustic emission (AE), to wear relied predominantly on experimental results to produce an actual relationship. These relationships were for measurements made under actual operating conditions and were often valid only under the conditions of the experiments.29,30 For example, wear that occurs in an unlubricated environment is relatively easily understood and measured and can be readily applied in real-world industrial settings outside of the laboratory.31–33 It has been found that measurement methods that do not rely on AE and noise do not accurately reflect the real physics and interrelationships of friction, noise, and wear. 21 This is because these models do not account for the complex dynamics of these factors in real-world scenarios. When examining machinery with several corrupted parts or in more complex situations, as when lubrication is used, the generality of the empirically derived relationships is called into question.34,35 In the face of these challenges, the aim must be to combine the different wear mechanisms into a single wear and noise model under dry and lubrication condition.
Friction and wear relationship is crucial for understanding tribological performance and many mathematical models have been developed to simulate the impact of friction on wear rates. These involve consideration of changes in surface roughness, including microscopic interfacial changes.36–40 The same value of a friction coefficient for two surfaces does not necessarily imply identical interfacial behavior across surfaces, as wear rates also play a significant role.41–43 Specific conditions such as lack of lubrication (dry sliding), or extreme operational conditions need the combination of friction and wear rates to simplify performance analysis. Effective lubrication is a key indicator of the link between friction and wear and is typified by short sliding distances and light loads.44–46
Various models in the public domain that have addressed the topic of friction, wear, and the noise produced have been evaluated, their hypotheses and limitations scrutinized, and hypotheses used to figure out the research gaps in the published literature. Our goal in doing this was to help shed light on how to improve upon current models. Additionally, this work presents models of friction-induced noise as an effective approach for estimating the degradation of components in motion. While numerous studies have focused on empirical models, others have developed mathematical, numerical, and analytical frameworks. However, these efforts have primarily addressed contacts devoid of lubrication. The role of lubricants currently stands out as the most important aspect of frictional wear that needs addressing.
This review explores the relationship between surface wear and frictional noise generated by friction between two mechanical surfaces. It examines models linking friction, wear, and noise generation, highlighting the limitations of current models in accurately predicting wear, friction, and noise. The review also explores contact mechanisms, emphasizing the forces exerted during contact and their correlation with the properties of materials. The primary goal of this paper is to analyze prominent contemporary models that link wear to frictional noise under both dry and lubricated conditions. It examines these models’ approaches to understanding how friction generates noise, which subsequently leads to surface wear. The paper focuses on identifying the key limitations of these models, current challenges in modeling, and the research gaps in the existing literature.
Contact surfaces under dry conditions
There are different mathematical models that try to describe friction and its relation to wear. The integration of wear-friction models, mathematical and/or numerical, is essential as friction and the consequent heat generated have a significant impact on operation processes.47–51 Wear can have a substantial effect on friction and friction processes, and analyses should combine wear and friction models. However, such models invariably do not include vibration and airborne noise, which are key components produced during the friction processes.52–54 The classical wear model assumes a rigid surface and the wear proportional to the imposed load. These models aim to accurately capture the behavior of contact and friction between surfaces but most deformation is of the contact asperities and occurs in the elastic region. More recently analytical and mathematical methods have been developed to address this challenge and to analyses the frictional mechanisms, heat generation and wear on rough surfaces.55–59
In dry contact, two elements slide or roll against each other without any lubricating layer. This state leads to direct contact at the microscopic level. These friction mechanisms are grouped into adhesion, plowing, and deformation conditions, 60 as presented in Figure 1. Adhesion Theory has been adopted; as two opposite surfaces come into contact, microscopic asperities meet and adhere to one another due to atomic interactions, chiefly van der Waals forces.61,62 This “sticking” resists the motion between surfaces, causing friction. As the stress on these surfaces grows, the adhesion force also rises, which in turn increases friction. Plowing effect adopted If the harder surface has asperities, it might “plow” into the softer material. 63 Furthermore, deformation conditions exist when some frictional force also occurs from elastic and plastic deformation at the surface asperities. 64 Elastic deformation can temporarily store some energy, but plastic deformation causes a more permanent change in shape, squandering power and adding to friction.
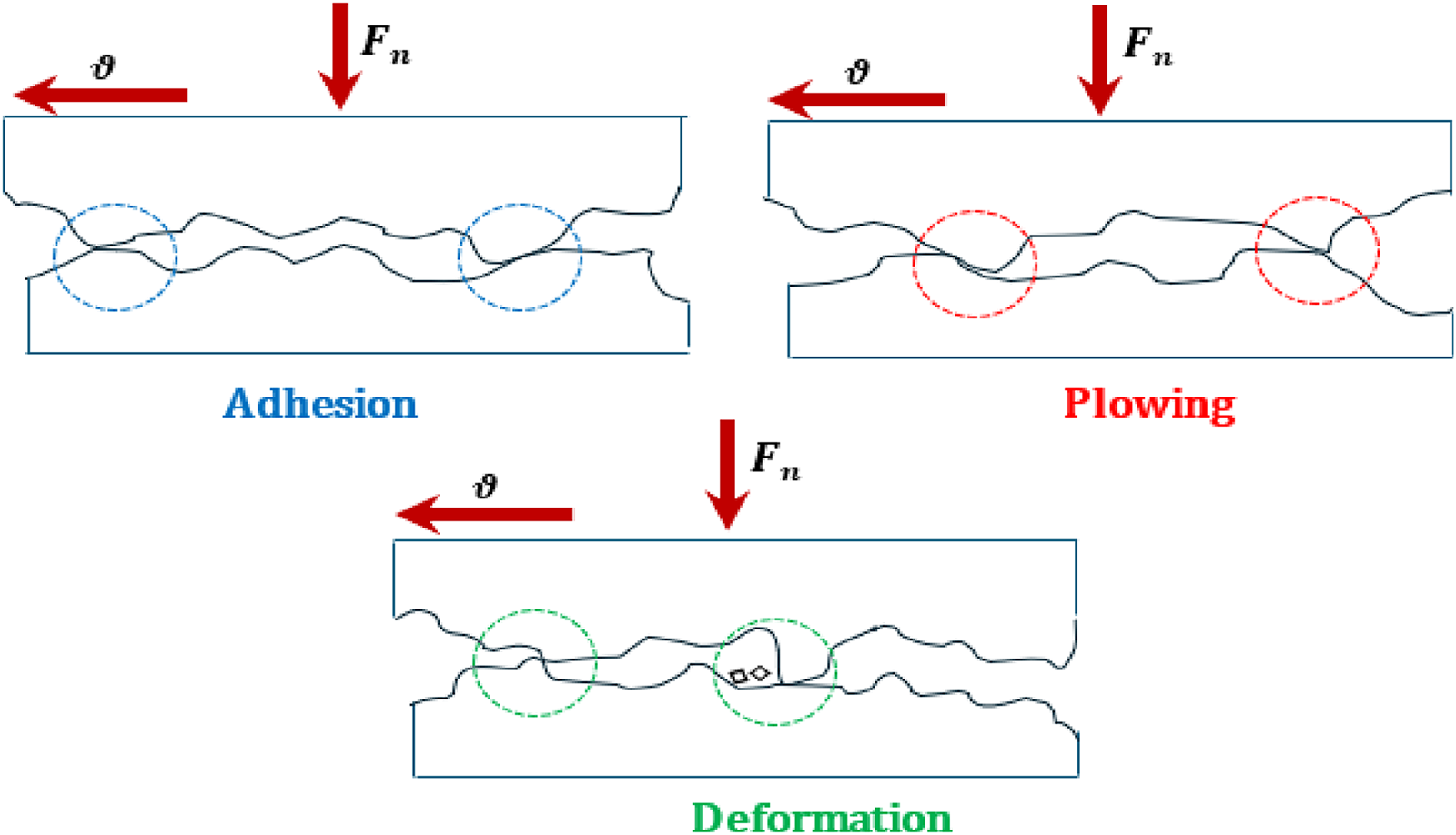
Friction contacts mechanisms in dry scenario.
Many friction models are derived from Coulomb's principle of surface contacts and are known as Coulomb's friction models.65,66 The widely used statistical friction contact model is the Greenwood–Williamson (GW) model, which was proposed in 1966, as Figure 2 describes the contact between rough sliding surfaces with the assumption of the random distribution of surface asperities. They discovered that many key properties of the contact are largely unaffected by the specific behavior or height distribution of individual asperities.67–69 The GW model is regarded as the basis to understanding the influence of the roughness value of a surface on wear and friction especially for spherical contacts. 70 The GW model has been successfully extended by Zhao and Feng to rough spheres contacts. 71 Statistical models mainly focus on the relationship between the statistical parameters. 72 However, both the GW model and the Greenwood-Tripp (GT) model assume Hertzian contact for surface asperities, enabling the calculation of the real contact area and contact pressure through the integration of the asperity height distribution. 73
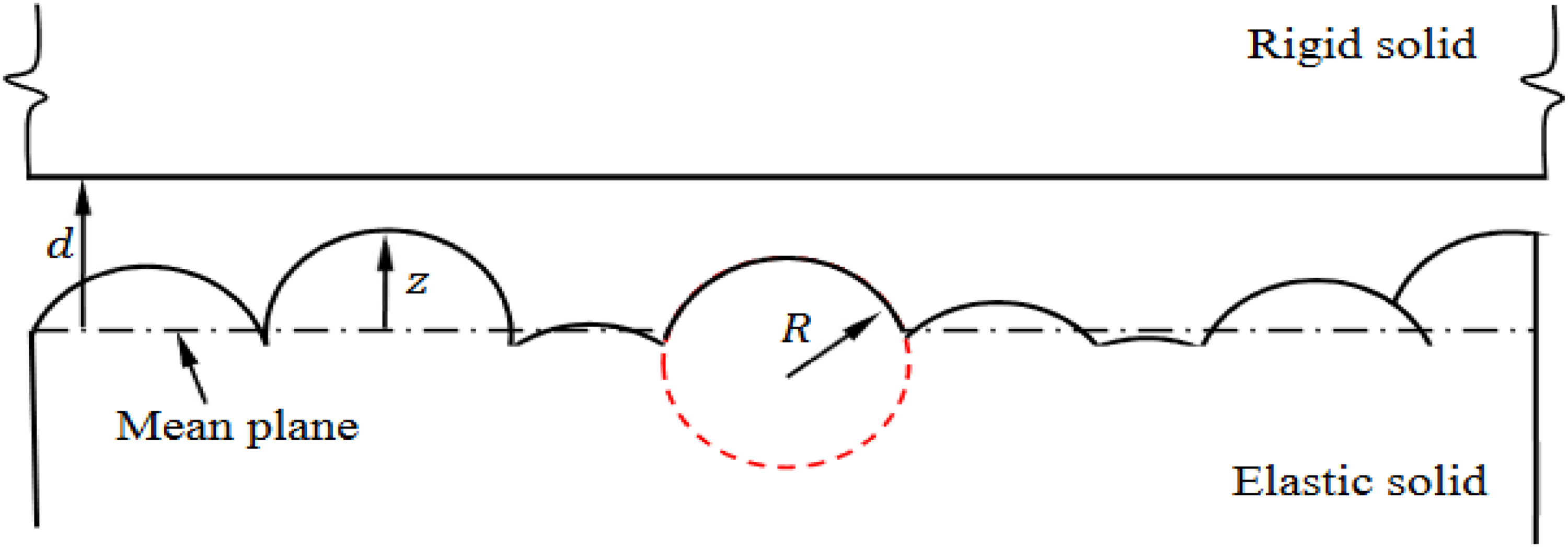
Contact mechanism between rough solids, GW model. 69
Elastic-plastic contact models
When the applied load is increased on bodies with rough surfaces, see Figure 3, there is increased elastic deformation of each contact surface, and the bodies are in the first phase of an extended elastic regime. 74 Experimental findings corroborate that a smoothing of the roughness peaks takes place in the first phase of contact, and that a polished surface exhibits predominantly elastic behavior. 75 However, Liu et al. 76 categorized material deformation into four stages: elastic deformation, initial elastoplastic deformation, secondary elastoplastic deformation, and full plastic deformation. Their results write down that, when accounting for variations in material hardness, the contact area of a single asperity increases during the initial elastoplastic deformation stage but decreases in the secondary elastoplastic deformation stage. Under the same deformation assumptions, the contact performance was examined using the elastic Hertz solution and the Abbott and Firestone curve. It was found that the elastic Hertz solution and the Abbott and Firestone curve did accurately model how rough surfaces deform under load. 77
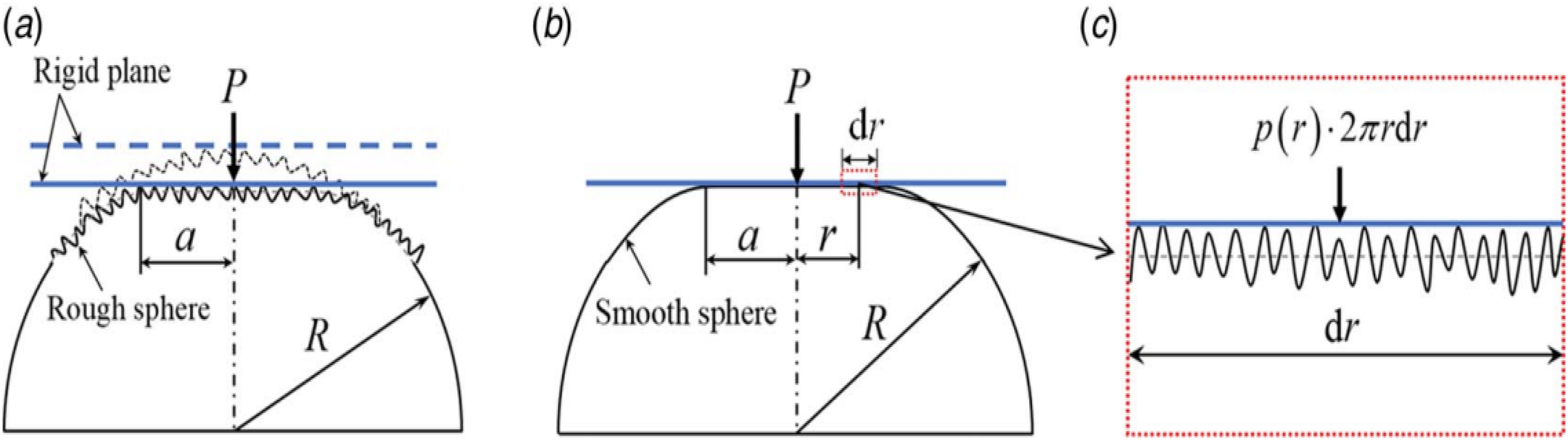
(a) contact between a rough sphere and a rigid plane, (b) Hertzian contact without surface roughness, and (c) contact on a nearly flat surface within a ring-shaped area. 78
Wang et al. 79 developed a rough contact model at the microscale the model accounts for the combined effects of both elastically and plastically deformed asperities on the rough surface, making it a more realistic representation of rough contact behavior. The model aligns closely with experimental results under low normal loads but shows discrepancies when the normal load is high. To evaluate the mechanical interaction states for rough surfaces, Tomita et al. 73 constructed a new asperity contact model that can be used to calculate the real contact area and contact force from the asperity distribution function, as well as the spectral moments of each rough surface. Meng et al. 80 applied a digital filter technique with a computer code to investigate the effects of inter-asperity cavitation and elastic deformation on non-Gaussian rough surfaces. Their numerical results show that, as the film thickness-to-roughness ratio decreases, the pressure flow factor increases, while the shear flow factor decreases. Chen et al. 78 introduce a theoretical model describing contact between a rough elastic sphere and a rigid plane. They found that the relationship between load and contact area is linear, but as the load increases, it approaches the behavior of a smooth sphere. Using finite element method (FEM) simulations, they successfully set up this load–area relationship, covering the entire range from partial to full contact.
Liang et al. 81 developed a contact model for elastic-perfectly plastic materials with rough surfaces. In this model, the rough surface contact is represented by multiple circular contact spots with different sizes. The model accurately predicts the relationship between load and contact area, which was confirmed by finite element simulations. Even for elastic-plastic contact, the contact area increases linearly with the load, and plastic deformation tends to further enlarge the contact area. Furthermore Zhao et al. 64 employ direct finite element (FE) methods to improve the accuracy of predicted loads in their elastic-plastic contact roughness model. This model, based on circular contacts of varying radii, proved effective performance, and yielded favorable results. Furthermore Waghmare et al. 82 developed a theoretical model employing finite element analysis (FEA) to study elastic-plastic contact based on n-point asperity, however due to complexity in contact load formulation the solution in n-model asperity become more difficult.
Recently Li et al. 83 develop model was established by characterizing the plastic roughness, assuming that the asperity is compressed to a critical depth under the effective surface roughness. The model's results say that it accurately estimates the actual contact area and applied contact force in comparison to earlier methods. Abdo et al. 84 created a mathematical model for elastic–plastic contact between two surfaces using critical interference. One surface is the real, elastic surface, and the other is a fictional one based on this interference. They compared their model with earlier models, like the one by Kucharski et al. model 85 and shown that the proposed model provides significant improvement. Xia et al. 86 developed a new method to model contact stiffness, considering how asperities interact and deform elastically and plastically. However, the study focused only on asperity interactions and did not account for the distribution of contact areas or the effects of friction. Recently Yang et al. 87 presents a line contact model for describing the normal contact between rough surfaces with self-affine fractal roughness based on the statistical approach. An iterative algorithm combining the Levenberg-Marquardt (LM) method with penalty function is proposed to overcome the limitation of the distribution of contact areas.
Two rough surfaces are shown in contact with a normal force as shown in Figure 4. Localized pressure and deformation at asperity contacts are showed by flux lines. Sliding motion is represented by the linear velocity, which shows how pressure and surface roughness affect contact areas. The wear rate assumes the velocity and roughness coefficient to be constant throughout the wear process.88,89 Asperity microcontact models were conducted to analyses the deformation of rough line contacts, which occur when two surfaces with roughness in only one direction come into contact and were generally successful.90,91 These models, based on the stages of deformation in the contact zone, have shed light on the wear process and the resulting surface patterns. Consequently, this approach is considered suitable for forecasting the deterioration rate, assuming various geometries of the asperities in contact in conditions of dry friction.
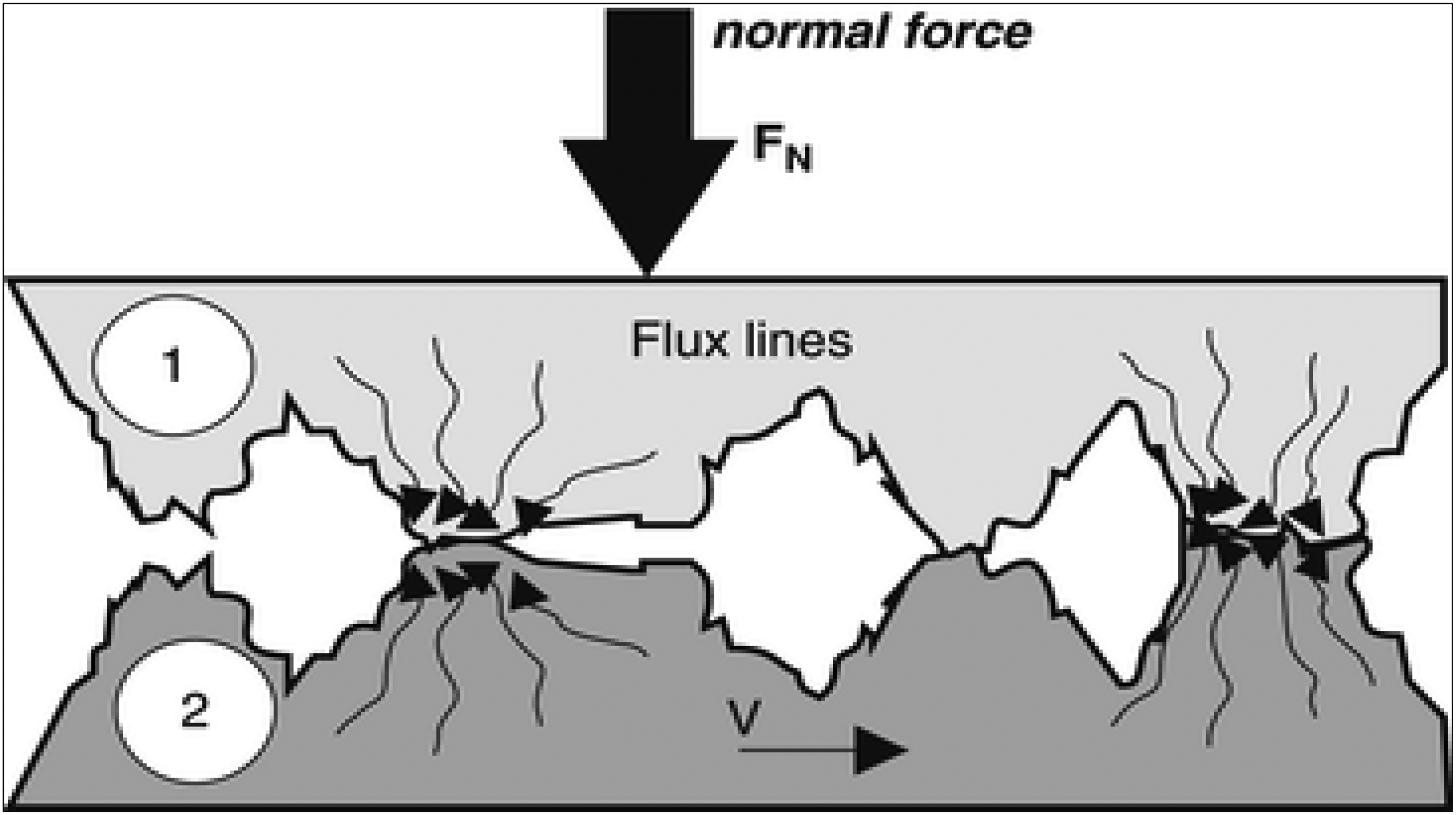
Contact interference between mating surfaces and shrinkage of thermal flux lines. 89
Numerical models
The Finite Element Method (FEM) can facilitate diverse applications across various contact scenarios, and such numerical models have enhanced the observation of frictional behaviors. This technique has been instrumental in extending the contact region under consideration, enabling a more detailed understanding of the friction process. As such, the digital approach has been employed to examine different contact geometries, whether flat-to-flat or flat-to-spherical, using both 2-D and 3-D models. The method has also explored various asperities contact, considering theories of deformation behavior or Hertzian contact. Thus, it is reasonable to assert that these models can accurately stand for the interaction between different forms and entities, possess the capability to forecast wear behavior, and are a validated approach for investigating wear mechanisms.
The simulation of mechanical interacting often meets challenges due to wear and deformation of the interacting surfaces. Predicting the wear rate is particularly difficult due to the complex distribution of contact pressure. To address these issues, the FEM (Finite Element Method) is often employed. This powerful tool uses sophisticated numerical techniques to handle such problems.92–94 The Finite Difference Method used to resolve the microscopic contact between the rough surfaces, while numerical models play a crucial role in predicting changes in surface shape. However, these models typically lack information about wear at the molecular scale.95,96 Kogut et al.
97
presents a precise solution using the finite element method to study the elastic-plastic contact between a soft sphere and a hard flat surface. It extends the classical Hertzian theory to fully plastic contact cases with simple analytical formulas. The method accurately models the elastic-plastic deformation of sliding bodies, treating one as a deformable sphere and the other as a rigid flat, following the basic principles outlined in equation (1).


The updated Archard wear model serves to measure the wear on a disc. Archard's original model, widely recognized for predicting wear using asperity contact theory, is enhanced in the modified version to include macro-scale factors,
53
leading to equation (3),

In the context of Hertzian contact, which relates to the stress over the contact area between two surfaces the contact radius α and effective radius R which can figured out by Hertzian contact, see equation (4).
53

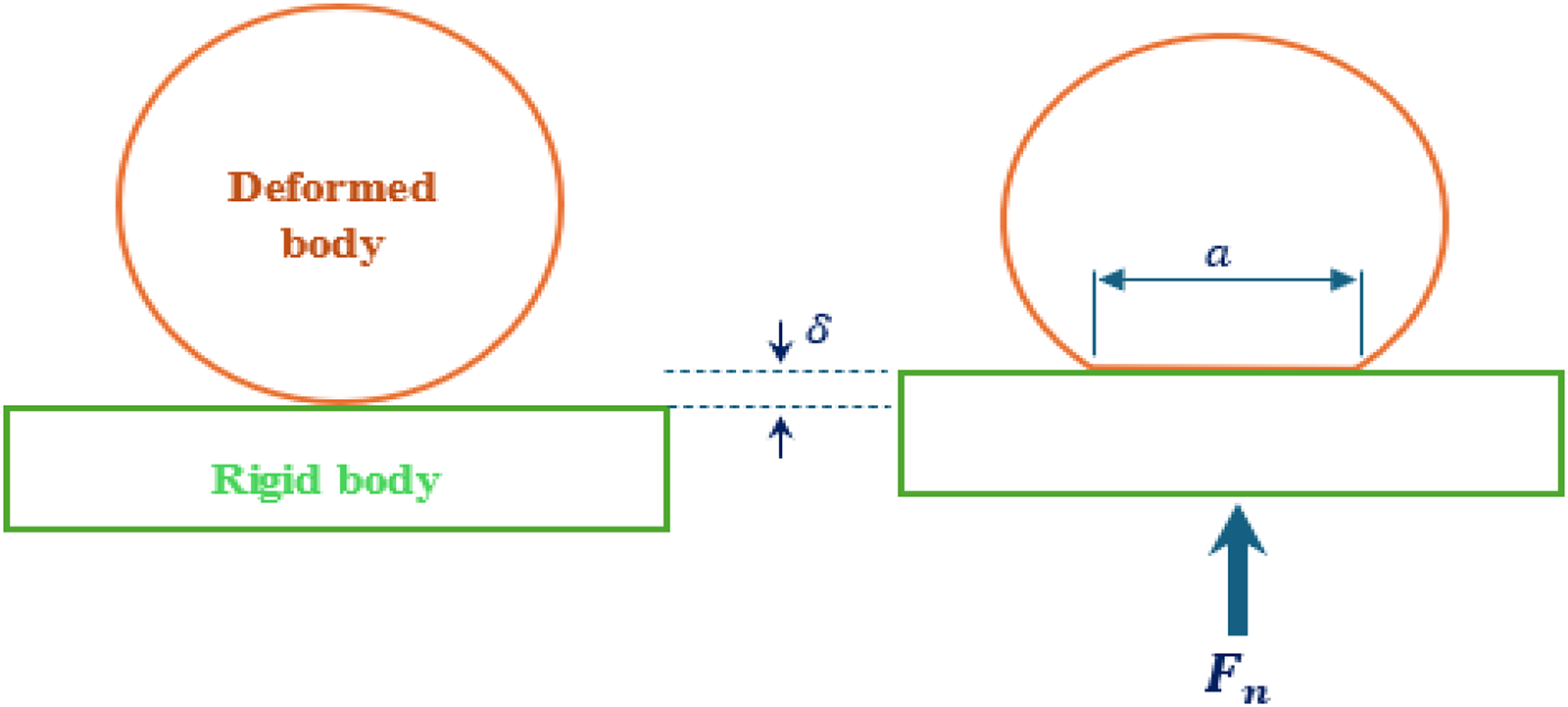
A deformable sphere in contact with a rigid flat body. 10
The Semi-Analytical Model (SAM) was adjusted to examine the pressure distribution and to scrutinize the actual point of contact. This aided in discovering a digital solution for contacts involving rough surfaces. 101 However, the surface inputs must be adequately resolved to for the model to be effective. 102 A semi-analytical method was developed based on an elastic-plastic code, while the convergence technique and the Fast Fourier Transform were adopted to improve computation methods. 103 A full three-dimensional numerical model was adopted under the dry frictionless elastic rough contact. The results showed how surface roughness interaction significantly effects the calculated results, particularly the asperities deformation. 104
The global wear model has aided in producing a better understanding for forecasting alterations in surface shapes. 105 The findings of the simulation aligned remarkably well with those obtained from experiments. A FE model was developed, featuring an axisymmetric sphere and a rigid flat surface, both represented in 2-D, as depicted in Figure 6. The stress distribution is displayed by a color gradient in the finite element model of a circular object in contact with a flat surface. The contact point, denoted by red, has the maximum concentration of tension, while stress diminishes outward, turning from yellow to blue. The investigation of contact mechanics is aided by the color scale on the left, which quantifies the stress concentrations. 106
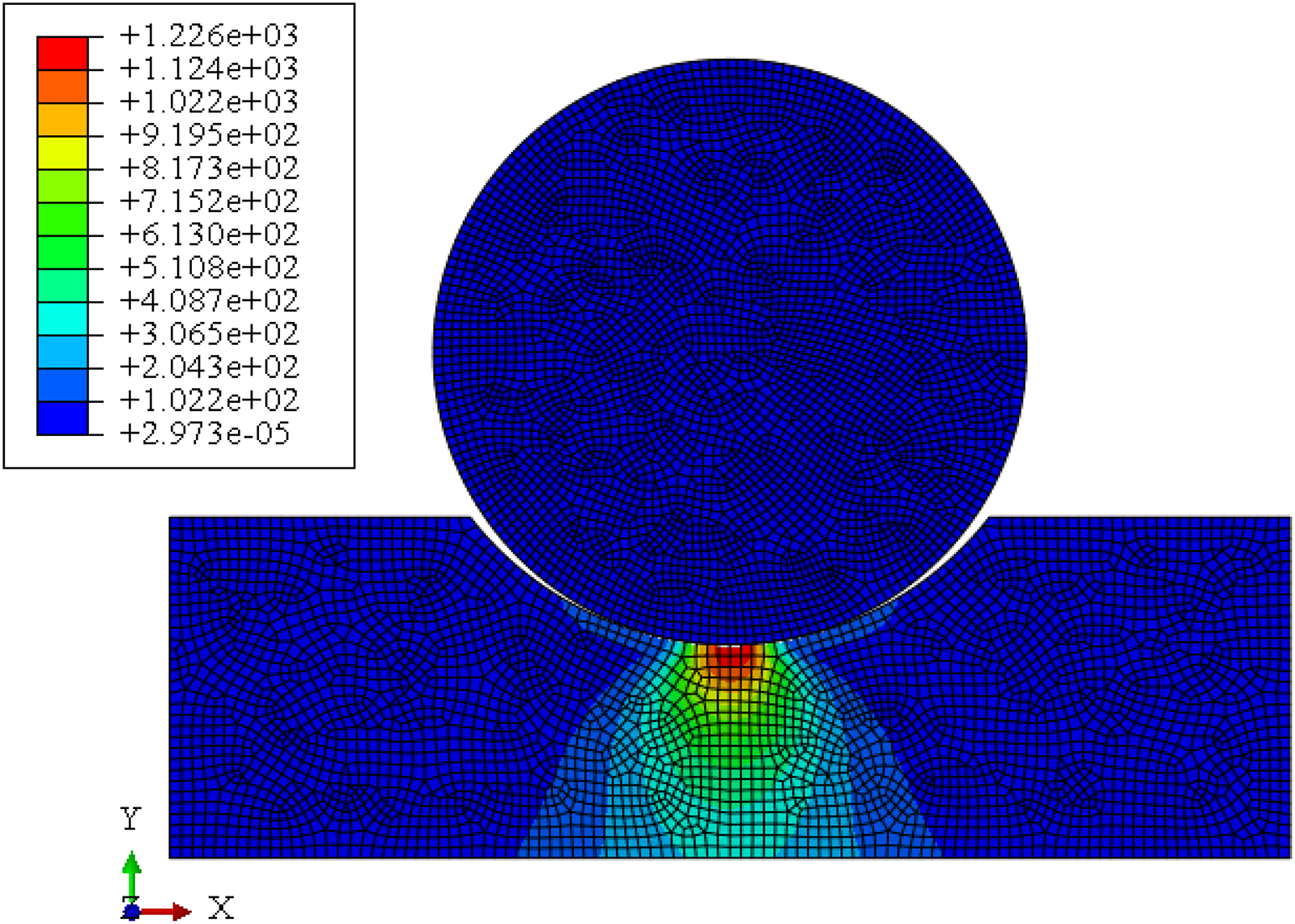
Fe model of a deformable flat and sphere surface. 105
A 2-D Finite Element (FE) method was used to model a rigid sphere, and a flat surface coated with a range of deformable materials from soft to hard. For comparison, a rigid flat body was used as the sliding surface for a deformable sphere. Using FE analysis to examine the elastic-plastic contact dynamics of a coated sphere under compression by a solid flat surface the existence of a dimensionless thickness of the coating. The result illustrated how a hard sphere interacts with a flat surface coated in materials of different hardness levels. 107 A new technique developed to assess the wear resistance of surfaces used a FEM method to explore a representative unit of the GW model, which was subject to symmetrical boundary conditions, as illustrated in Figure 7. This model proved to be an effectively approach for estimating the collective contact reaction of rough surfaces. 108
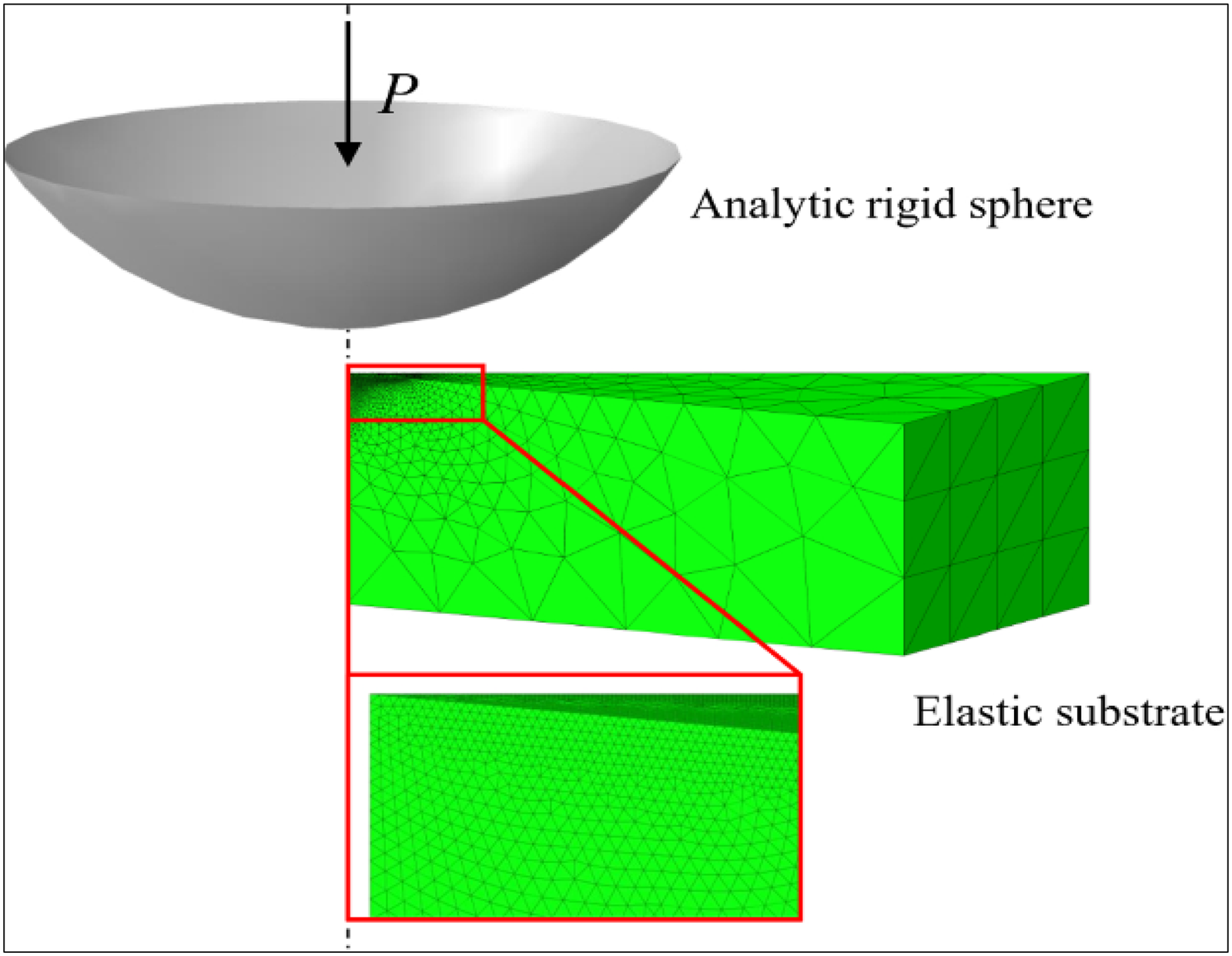
Schematic of finite element modelling of a modified GW model. 108
The GW model was constructed according to the contact pattern of the 3-D sinusoidal asperities. The interaction between asperities is considered discretely, ignoring the merging of asperities, using a modified Bossiness solution. It was claimed that FE results comprehensively demonstrated that sinusoidal asperities provide a more correct representation of the real situation than spherical ones. 109 A refined edition of the GW model has been suggested for elastic-plastic rough surfaces. To seamlessly integrate asperity interactions, the model adopted a hexagonal distribution for the random arrangement of contact points, which preserved the surface's overall isotropic nature. 110 By directly simulating representative rough surfaces, the accuracy of the improved load-area correlation was validated for a range of contact frictions. This outcome laid the groundwork for more investigations into wear and friction.
It is never easy to quantify surface wear in mechanical contacts during operation processes. In contrast, the deterministic interdependence between frictional noise and surface wear may be used to predict changes in the surfaces. 111 The behavior proved by the interacting surfaces is significantly influenced in the presence of friction and wear. 22 Contact between roughness peaks generates frictional forces in both surfaces, meaning that the perceived and effective contact areas can be significantly different. Although The process of wear is among of the least understood aspects of mechanics, even though it is known that wear and friction are controlled by contact between rough surfaces, as shown in Figure 8. 16 The contact surfaces show the way plastic deforms and the generation of debris resulting from cracks on the elimination of asperities. This approach was performed to import materials under stress and aid in understanding the wear of mechanisms.
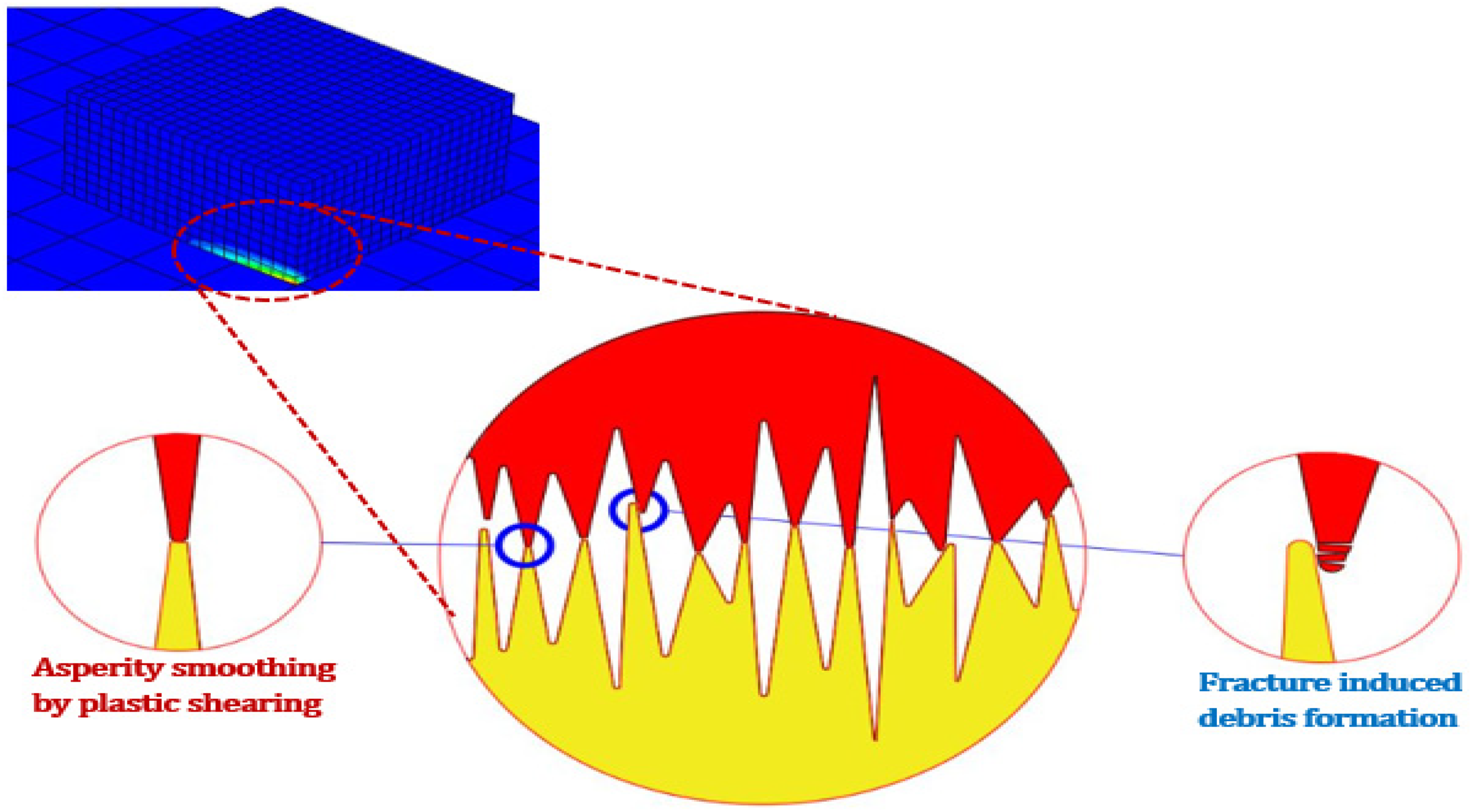
Nanoscale dynamics simulations of wear of asperities contact.
Combinations of friction, wear, and surface roughness models
The limitations of predicting wear or friction are based mainly on the model's ability to perform in practical conditions. In the case of analytical models especially, limitations are also evaluated based on the assumptions made for surface contacts.112,113 De Mooerlooze et al. proposed an analytical model which was validated experimentally for a wide range of coefficients of static friction, but only for low wear and dry conditions, 114 Jackson et al. 115 produced statistical models for elastic-plastic contact of rough surfaces that are reliable only when the contact assumptions are robust. Generally, roughness contact models presuppose that deformations are minor and localized to the asperity peaks. Silva et al. 116 developed a theoretical model in which the Archard model was presented as a first value problem but with ambiguity about the wear coefficient. This model fits the characteristics of surface phenomena but does not account for the roughness coefficient. The results demonstrated that the sound pressure level increased as the surface roughness increased suggesting its application in a study of surface roughness would be useful.117,118
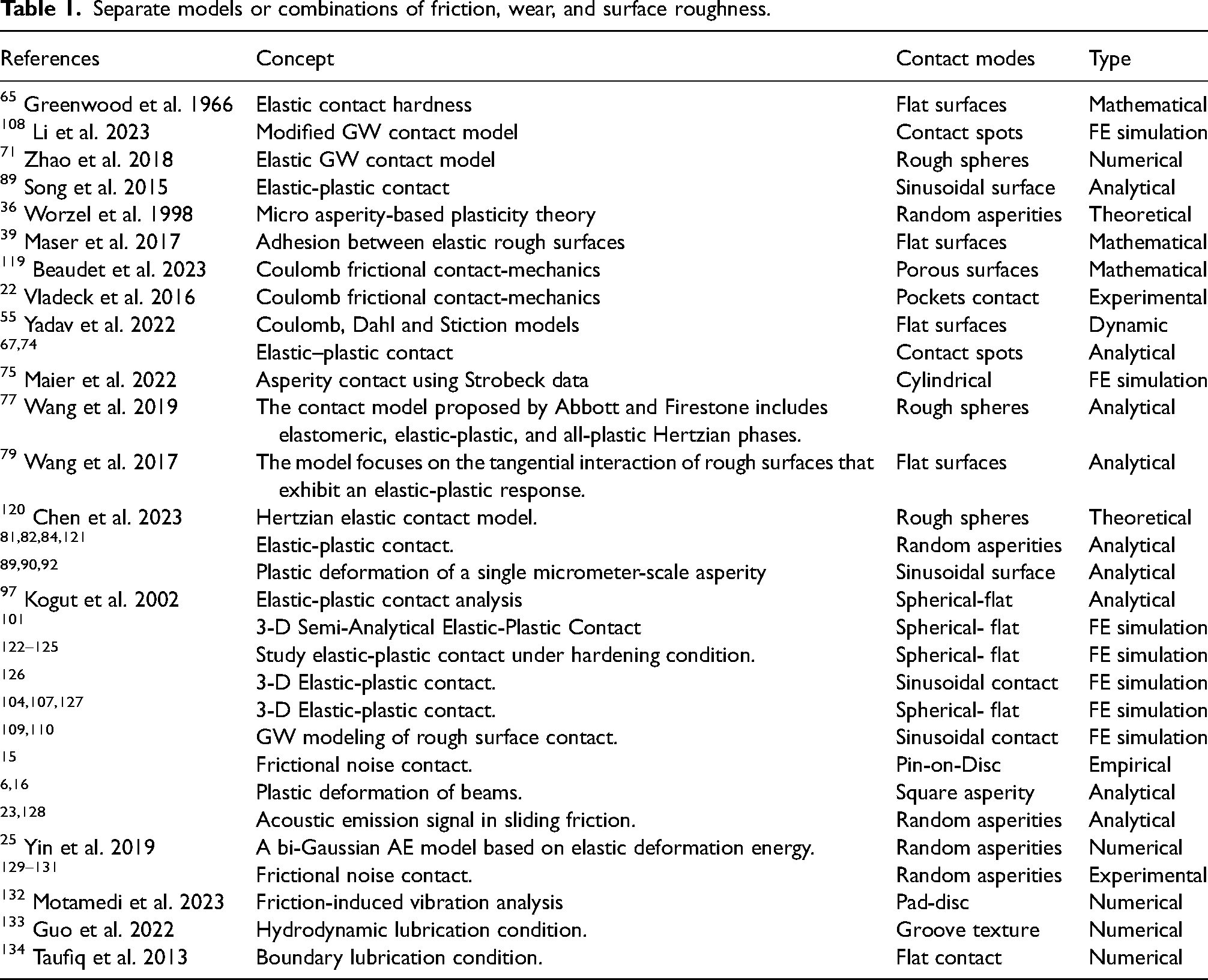
As shown by the dry friction models, an array of mathematical, analytical and simulation models have been used. These models have been shown to be capable of forecasting friction and noise levels under specific conditions. The study offers an in-depth summary of the principal applications in contact mechanisms. Table 1 presents an orderly collection of major works on models related to friction, wear, and surface roughness. The table categorizes these studies based on their research focus specifically, the types of contact mechanics models applied, the contact modes under examination, and the method used to approach these models.
Separate models or combinations of friction, wear, and surface roughness.
Lubricant condition of contact mechanism
By reducing wear and friction between surfaces in contact, a contact mechanism's lubrication state has a significant impact on the longevity, performance, and efficiency of mechanical systems. Lubrication allows for smoother operation and longer component life by reducing direct metal-to-metal contact in mechanisms like sliding surfaces, gears, and bearings. Depending on the thickness of the lubricant film, there are three different lubrication regimes, see Figure 9, Hydrodynamic lubrication, in which the film of lubricant carries the load, elasto-hydrodynamic or mixed lubrication where both the fluid film and the asperities carry the load, and boundary lubrication where the load is carried mainly by surface asperities.135–141
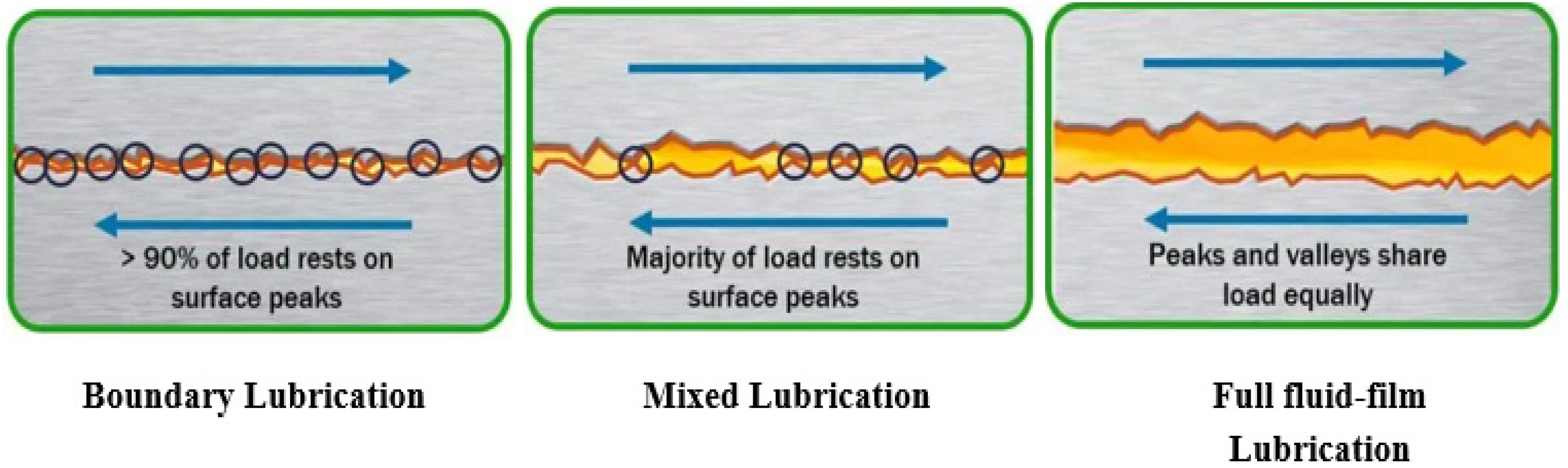
The interactions of asperities within the three distinct contact conditions. 139
Lubrication contacts models
The lubrication process is based on the balance between fluid movement and hydrodynamic pressure. 133 Zhang et al. 142 A model, combining both numerical and analytical approaches, was specifically developed to explore tribological characteristics of a textured surface under different lubrication conditions. An elastic-plastic contact model and the Reynolds average flow equation were used to calculate the contact pressure across the contact area. Through comparing the predictions of the current model with the pin-on-disk experimental results, the validity of such mixed lubrication model is confirmed. Costa et al. 143 Studied how different surface patterns (circle, groove, and chevron) affect lubricant film thickness in hydrodynamic lubrication. The results showed that the shape of the patterns influences film thickness and pressure. Ramesh et al. 144 developed a numerical models used the Navier-Stokes equations to estimate the lift generated by textures. The results verified that under hydrodynamic lubrication a textured surfaces of cross-shaped continuous grooves gave up to 80% lower friction than a smooth surface. According to the results, the lowest friction occurred at low texture densities.
A 2-D numerical elastic-hydrodynamic model was developed by Su et al. 145 to examine the friction and wear of sliding bearings with textured surfaces comprised of relatively soft material. It was found that load support and pressure distribution were greatly affected by small elastic deformations, and the load support drops sharply with thin film hydrodynamic lubrication. There are various methods for modeling the interaction of two uneven surfaces when a lubricant is present. Figures 10 and 11 showed the spherical on flat contact and the flat-on-flat surfaces, respectively. The hydrodynamic contact was evaluated by using the lubricant layer as a spring. As the two surfaces draw closer together, more asperities come into contact, and the stiffness of the asperity contact increases. However, when the separation increases, the asperity contact becomes negligible, and the overall stiffness is solely determined by the liquid film stiffness. Xiao et al. 146 adopted the Greenwood and Williamson (GW) and Kogut and Etsion (KE) statistical contact models were adopted to evaluate and assess the ordinary contact stiffness expressions for dry rough area sliding, however as surface roughness increases, so does solid stiffness, and the lubricant film gets thinner.
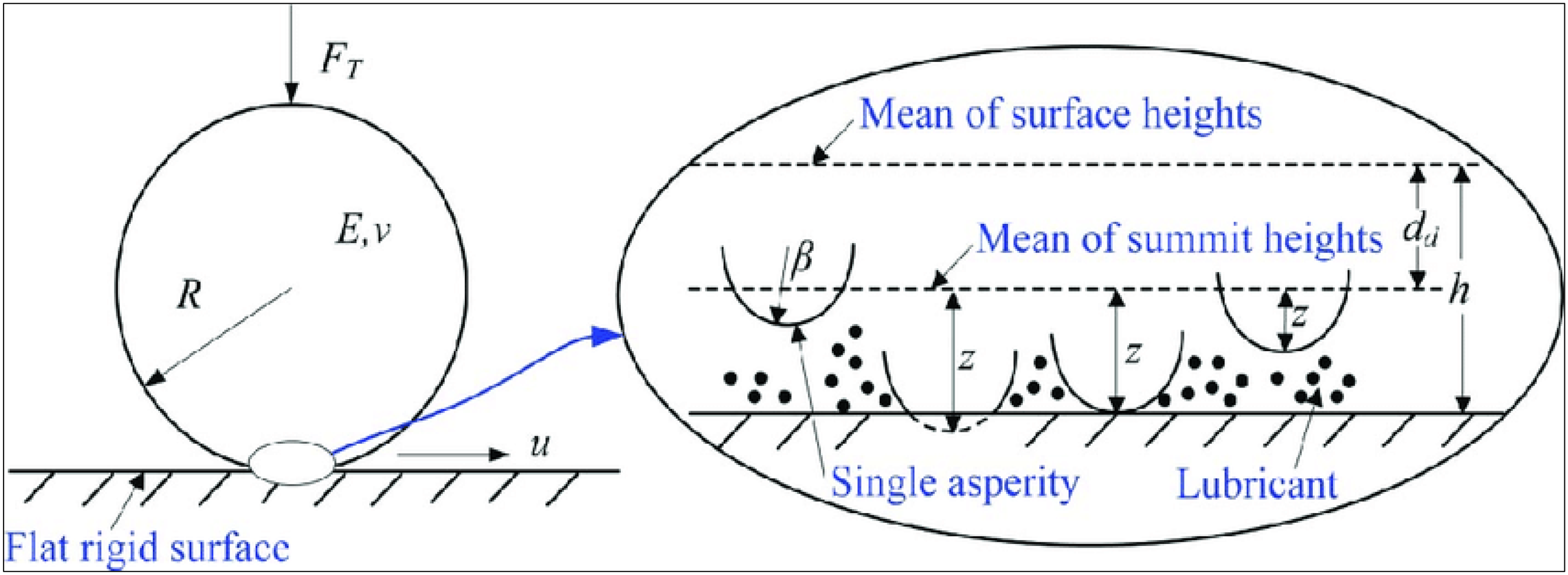
Contact stiffness and lubrication. 146
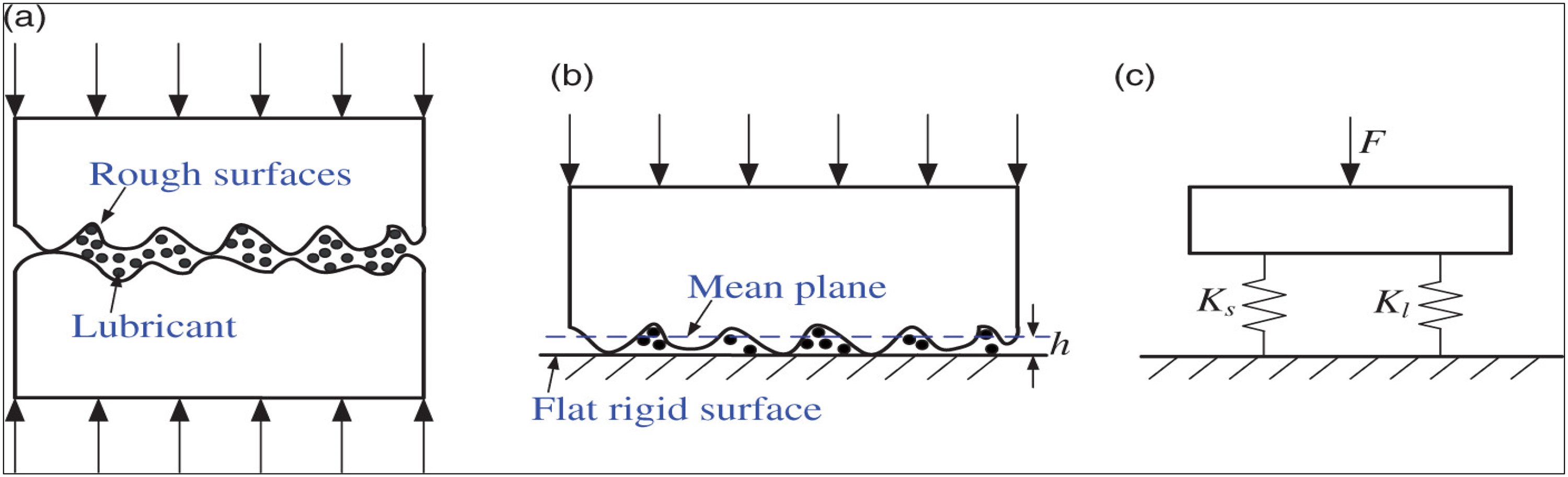
Equivalent contact of a sphere on a flat surface lubricated at contact area. 146
Alsamieh 147 developed a numerical model of the expected behavior of surfaces of differing roughness for different operational parameters, including speed and load, under different conditions of lubrication, beginning with entirely elastic contact, transitioning to elastic-plastic contact, and ultimately reaching fully plastic contact. The experimental results showed that the KE model demonstrated superior accuracy compared to the GW model. Sun et al. 148 investigated the surface contact stiffness for mixed lubrication using an elastic interface model. The contact stiffness was found to depend on solid and lubricant contacts, which are not known in advance. The contact stiffness was deemed to consist of the solid contact stiffness and lubricant contact stiffness. These two elements are interconnected through the equivalent lubricant thickness. The analysis showed that the mixed lubrication surface has higher contact stiffness than a dry rough surface because of the presence of the lubricant. 149 The simulation predicted that, initially, the wear rate decreases significantly in the early stages due to reduced contact area and increased lubrication film thickness. 150 As wear progresses, the wear coefficient stabilizes, reflecting a balance between material removal and lubrication efficiency. 151
Chong et al.,
152
developed a semi-empirical model to better forecast the friction performance of lubrication systems. By linking the model with experimental data, they provided a solid foundation for more accurate forecasts. While Lin et al.
153
developed a semi-empirical model for determining the shear features of fully formulated engine lubricants. A model coupling 3-D of freedom was suggested for investigating the mechanisms of vibration and noise induced by friction in marine stern tube bearings, as illustrated in Figure 12, The spectra power density of rough contact can be calculated according to equation (5):
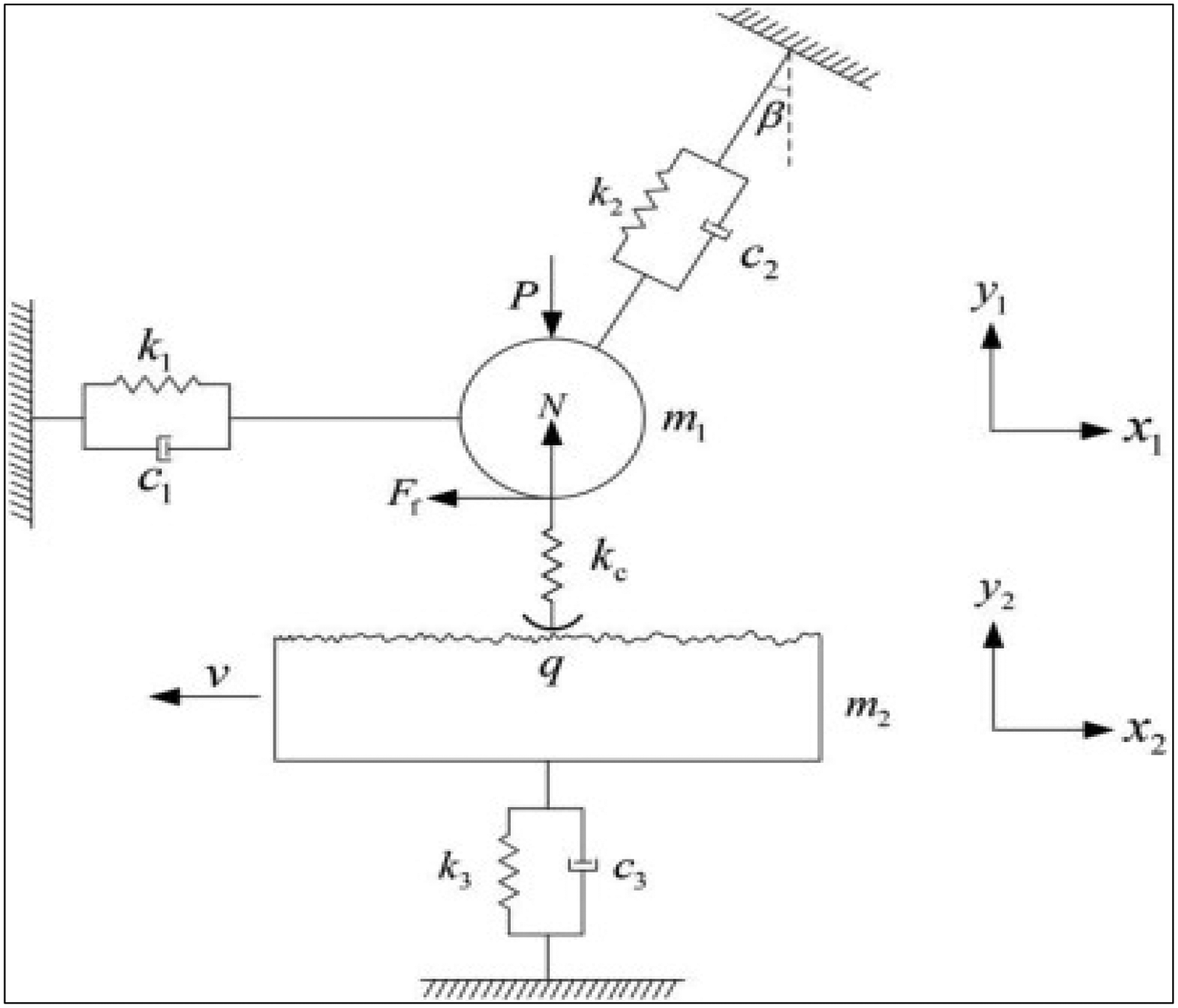
Three-degree of freedom model for marine stern tube bearings. 153
Wang, et al. 154 used the mixed-EHL model (Elastohydrodynamic Lubrication) with formal counter interaction, and compared the results obtained with those from the full-scale model. A contact-embedment method was used that included details of the asperity contact pressure in the overall pressure distribution to show the intensity of surface interaction. The study performed numerical experiments and compared the results with those from full-scale mixed-EHL, the results suggest that employing the macro-micro technique can provide an accurate estimates of film thickness. Nuraliza et al. 155 investigated the lubricated sliding movement of a pin on disc for a range of surface textures with load changing the pin from point contact to surface contact. The inclusion of lubrication adds complexity to model development. Therefore, analyzing friction in lubricated contact scenarios is more complex, leading much research to sidestep this area of study. In response to the complexities introduced by the lubricant layer.
Noise due to friction in lubricated interactions
Friction-induced noise in lubricated interactions is affected by factors such as surface conditions, lubrication properties, and mechanical behavior. Understanding these factors is crucial for controlling noise in applications such as automotive systems, gears, and brakes. Nam et al.152,153 demonstrated the use of lubricant to reduce the friction coefficient between two solid surfaces, protect the surfaces in contact and reduce friction noise. The generation of noise due to friction under lubrication was explored. The findings confirmed that a decrease in lubricant caused friction coefficient and noise to increase. Zhang et al.
156
demonstrated that an increase in either or both the friction coefficient and specific pressure resulted in increased vibration levels and frictional noise. Both analytical and numerical outcomes indicated that the nonlinear coupling substantially influences the vibration and emitted sound in the system's dynamic behavior. Here, the normal force was represented as a multiple of speed up to the third order, as indicated in Figure 13. The tangential vibration speed of the bearing is calculable using equation (6):
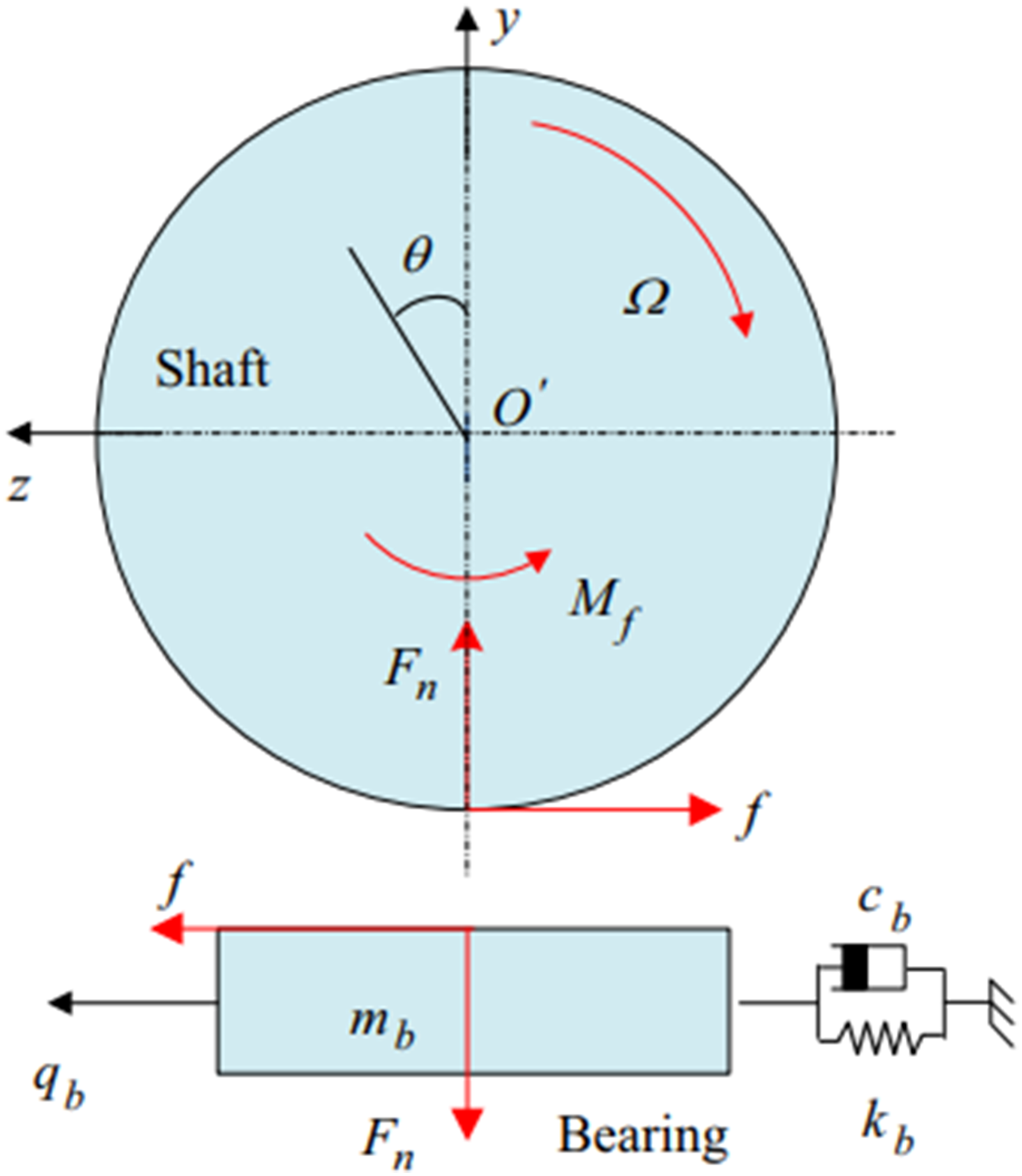
A spring-damper model for shaft and bearing. 156
Qiao et al.
157
This analytical model examined the issue of noise-induced transmission in rod with disc velocity for both clockwise and counterclockwise rotation. Establishing a distinct correlation between the mechanisms that generate AE signals, and the phenomena of friction and wear is crucial for the quantitative calibration of wear rates and lubrication conditions. Towsyfyan et al.
158
claims to have developed and confirmed the accuracy of a comprehensive model to predict the AE signals produced by specific tribological conditions. Here AE was demonstrated as an accurate predictor of the frictional behavior of rotating machinery. In the presence of a lubricating film, AE energy is directly produced by viscous friction and the elastic deformation of roughness (asperities), as indicated in Figure 14. However, while a theoretical model that can uniquely predict the AE signal level under varying lubrication conditions has yet to be established the basic relationship between the AE signals, 
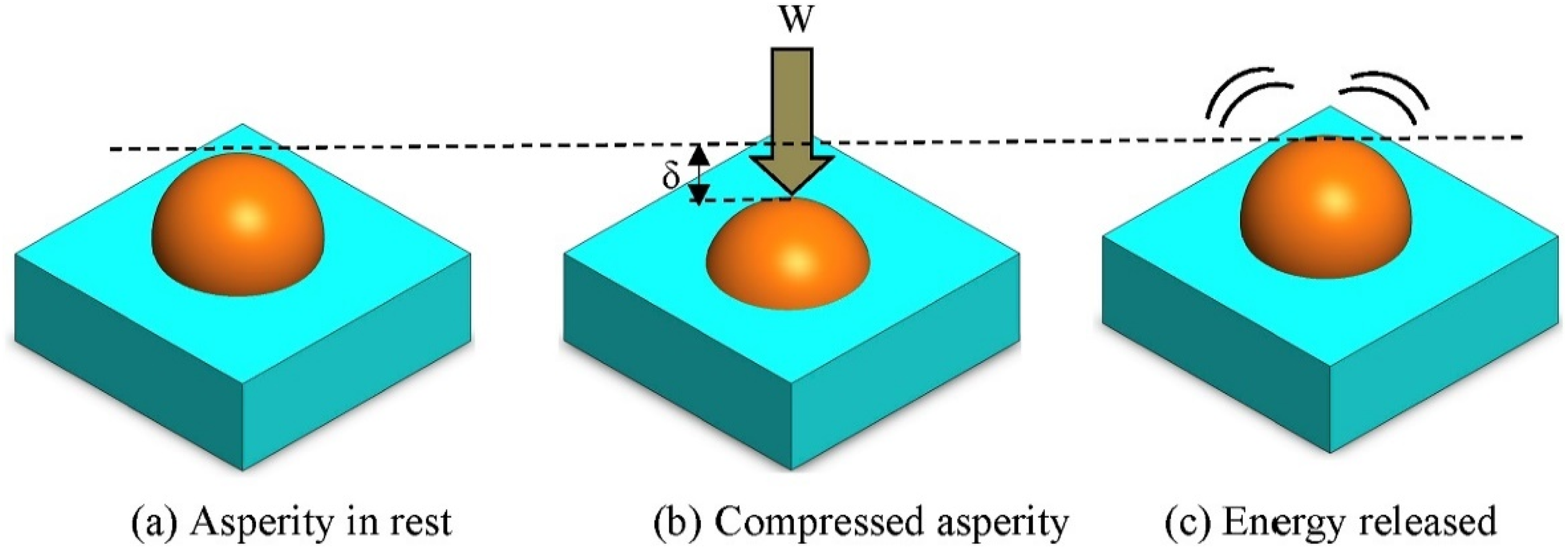
Release of strain energy through different contact states. 114
The AE signals, 
Mechanisms of noise generation
Analysis of the AE signal could pave the way for the adoption of a diagnostic method for fault detection, offering a novel approach to machine health monitoring. This could contribute to the better understanding of the intricate wear mechanisms present between loaded surfaces in relative motion.159,160 Noise due to friction can be categorized based on the noise level. It is referred to as friction noise when the applied frictional forces between two sliding surfaces are relatively small, and as squealing noise when these forces are high.161,162 Only a handful of studies have delved into the unique properties of friction noise produced at low contact pressure which is important in determining the pivotal role of roughness.
Thus, surface roughness can be investigated using the sound pressure level, and the results are reliable and consistent for the engineering materials under study. 163 Advanced surface and contact condition monitoring systems may use the observed results, which were found to be highly linked with sliding conditions and surface damage. 164 As seen in Figure 15, the load will affect the sound spectrum, with the roughness surface causing the most variations in the sound spectrum peak.
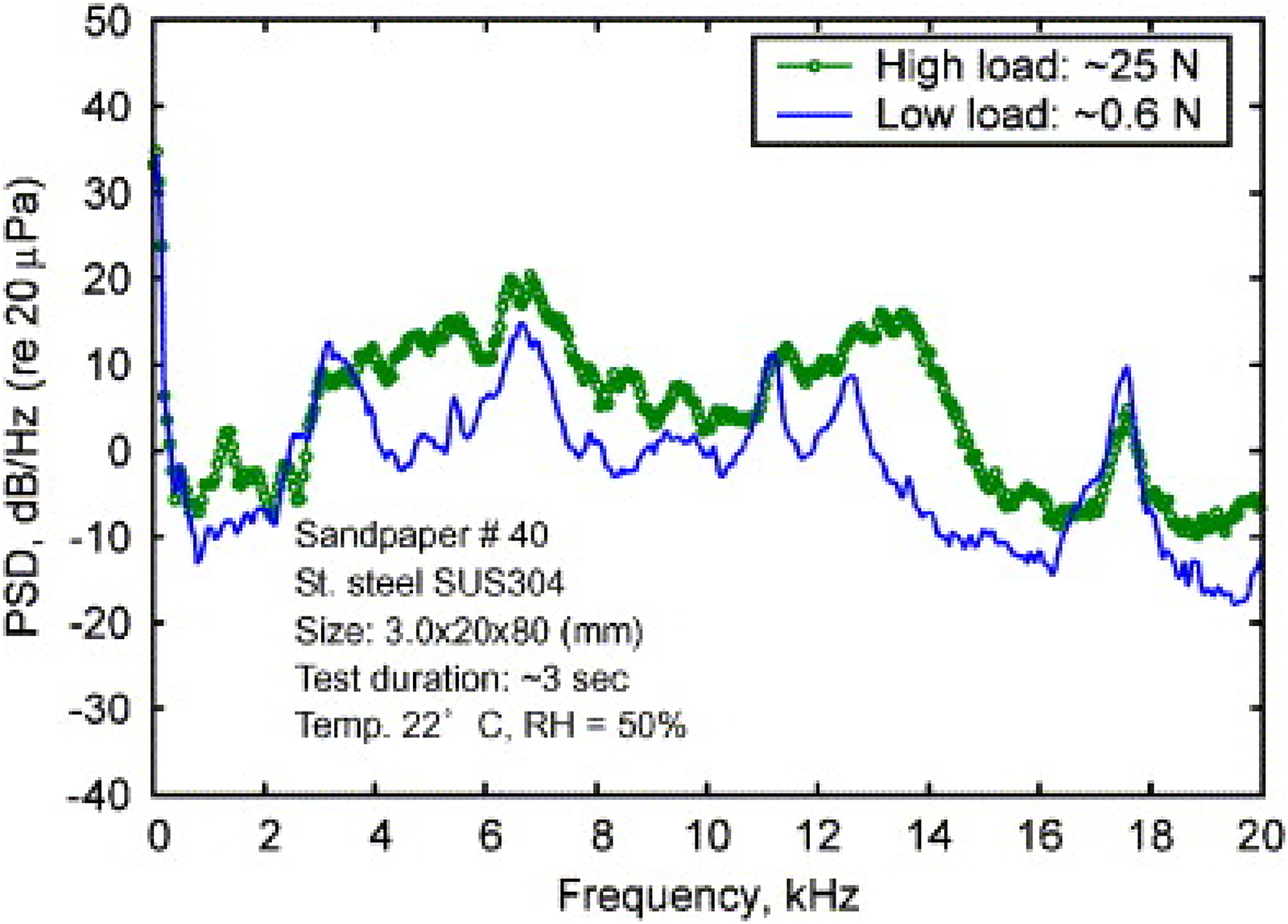
Comparison the sound pressure under different loads. 164
The sound level generated by surface friction escalates with the speed of sliding, and there is a fundamental relationship between the sound level and wear, particularly in dry conditions. 162 Further research found that for a given surface roughness the related noise increased with the product of sliding velocity and surface roughness, 165 Using the transient dynamic approach is an efficient way to forecast sliding contact of rough surfaces and the consequent frictional noise due to surface roughness. The model also facilitated description of the Gaussian topography of rough surfaces, determined through a 2-D lateral measurement and then input to a FE model. 166 A comprehensive method for monitoring surface damage after multiple sliding cycles, which involves comparison with the average sound pressure level measured over an extended period has been outlined in which also discussed the relevance of the presence or absence of squeal. 167
The correlation between AE characteristics and stick-slip behavior has been investigated, demonstrating the capability of AE as a means of identifying and tracking tribological activity.168,169 Contact problems of rough surfaces continue to intrigue tribologists due to their significance in the friction, wear, and noise mechanisms and unresolved nature.53,170 Noise signals generated at the contact point were measured and assessed to determine friction and wear action, and to monitor wear processes. 171 Energy is transferred between surfaces by friction which also acts to dissipate the energy resulting from relative motion. When a system provides excess energy, it can lead to the generation of noise.172,173 Experimental research has found and validated the presence of a correlation between the sound pressure levels and multiple friction variables, including surface roughness and the speed of sliding.130,132 The role of roughness is crucial when rough surfaces are rubbed together.174,175
The exploration of friction-noise models has opened a new perspective for examining the behavior of the dry contact of moving parts.176,177 Noise due to friction between rough surfaces aids in assessing the frictional dynamics. This method involved refining and advancing a mathematical model, incorporating both friction and noise generation, which enhanced the technique, and predicted wear rates accurately.178,179 Numerous studies have devised numerical and analytical models capable of relating the frictional characteristics of contact surfaces to the noise levels produced during sliding and it can be stated that the technique of combining friction and noise has proven to be effective and has yielded better outcomes compared to earlier models.
Friction, wear, and noise models
It is certain that during contact with rough surfaces, wear and airborne sound are unavoidable. Numerous experimental studies have established the correlation among friction coefficient and measured acoustic emission (AE) levels. 180 Wan et al. 181 used AE signals to monitor tool wear in precision micro-milling. They placed AE sensors on spindles and workpieces to monitor tool wear and found that the AE signals from the spindle housings were less sensitive compared to those from the workpieces. Twardowski et al. 182 employed machine learning techniques to assess tool wear according to the AE signals, achieving a prediction error of less than 6%. Rao 183 investigated which were the dominant features affecting tool wear using AE signals and developed a mathematical model to calculate tool wear.
Akay has confirmed that under conditions of high contact pressure, the occurrence of friction noise is due to mechanical instabilities such as stick-slip. 184 The release of energy-generating high frequency AE signals occurs due to deformation or wear of solid contacts. 185 Airborne noise analysis was used by Khan, et al. 171 to assess wear mechanisms of components in contact with different forms of asperity under dry conditions. The effectiveness of the measured sound level in estimating wear conditions was investigated, the authors claimed this was an effective method for evaluating wear damage. Maximum values of noise parameters were used to identify the maximum wear limit for numerous contacts under dry conditions. However, lubricated conditions were not investigated.
Yokoi and Nakai
161
investigated frictional noise, attributing the noise produced as the simultaneous presence of low friction coefficient and a rough sliding surface. However, change in friction coefficient directly influenced the sound pressure level. The experimental studies confirmed there were noticeable changes in the sound pressure level Lp (dB) due to changes in such parameters as surface roughness and sliding speed. Furthermore, an equation was established to represent the relationship between the sound pressure level, Lp (dB), the sliding velocity 
Devenport et al. 168 conducted investigations into the AE response of diverse materials, revealing that each material presented a unique response. This underscores the importance of considering the materials involved when using AE to monitor and/or investigate damage mechanisms, Qi et al. 186 introduced a new design for a piezoelectric AE sensor for the monitoring and inspection of high-speed train bearings. They simultaneously developed an enhanced model of the sensor based on the premise that there is a contact phase involving two planar surfaces, as depicted in Figure 16.
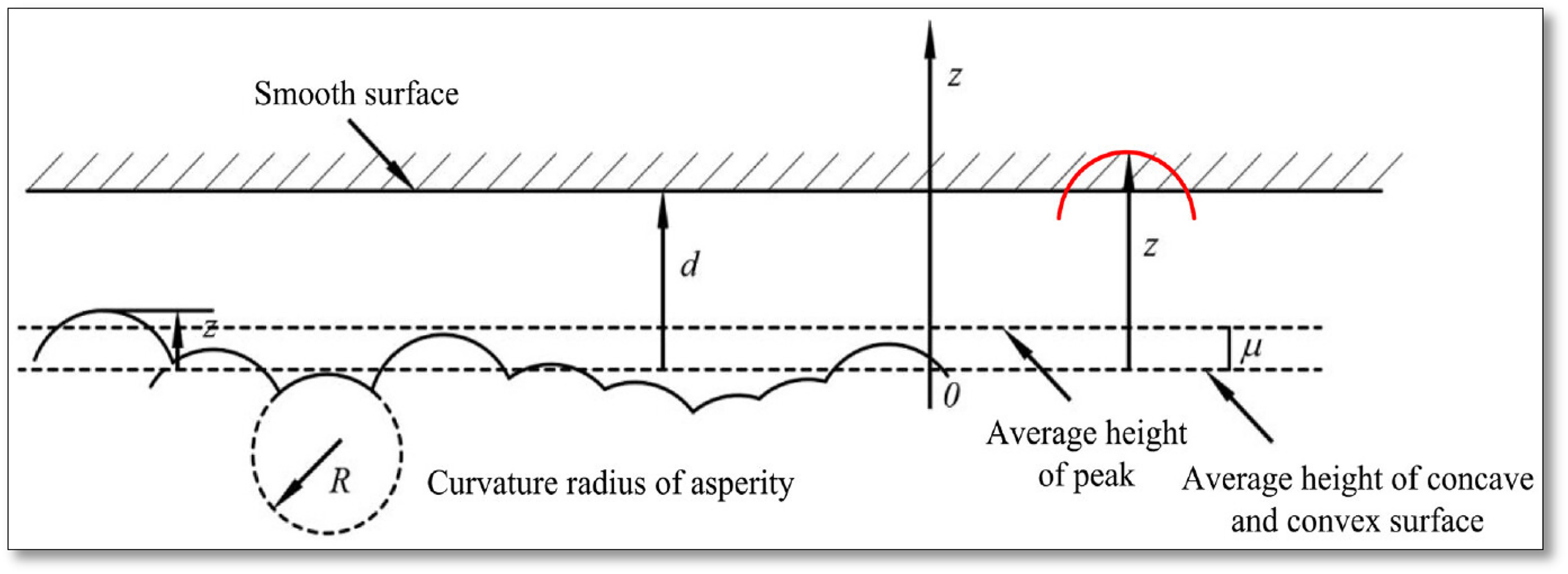
Contact mechanisms between a rigid smooth surface and a rough surface with circular asperities. 181
The height of the asperities is z, with σ the RMS of asperities height distribution.
186
Thus, the distribution function 

Wang et al. 162 examined the impact of surface roughness on frictional noise, noting a simultaneous increase in both friction and noise levels. However, Zhang et al. 187 have highlighted that the interplay between surface roughness, friction, and noise is complex and is impacted by many factors, for example the materials in contact, sliding speed, and applied load. As stated above Wang et al. 188 investigated both experimentally and numerically a pin-on-disk test rig and demonstrated that geometry modifications of sliding materials significantly affect sound generation. Hisakado et al. 189 Wear tests were conducted by sliding an iron pin against a hardened bearing steel (SUJ2) disk. Comparing the wear rate with acoustic emission (AE) signals showed that the average AE event count rate rose as the equivalent mean depth of microgrooves increased. The frictional noise produced by two flat rough surfaces rubbing against each other under normal loading was assessed. The area of contact when under small load is the primary source of noise and the rougher the surface the higher the sound pressure level, Lp(dB), all other factors constant.130,131
These results all confirm that the correlation between surface roughness, friction, and noise is complex and depends on a variety of factors including the materials in contact, the sliding velocity, surface toughness and applied load. However, most reviews consider friction, wear mechanics and acoustic noise separately. There is a demand for models that can correctly link wear and friction noise. 190 Motamedi et al. considered brake squeal AND developed an artificial intelligence algorithm to estimate the dynamic behavior and possible squeal frequencies from surface roughness data. 132 Mathematical and numerical models aid in understanding and predicting the correlation between wear and noise due to friction. Comprehending the influence of friction and wear on the generation of AE signals is crucial for the establishment of a dependable wear monitoring system. Nevertheless, most numerical, physical, and experimental models of friction and wear have been independently developed without considering the AE due to friction.21,180
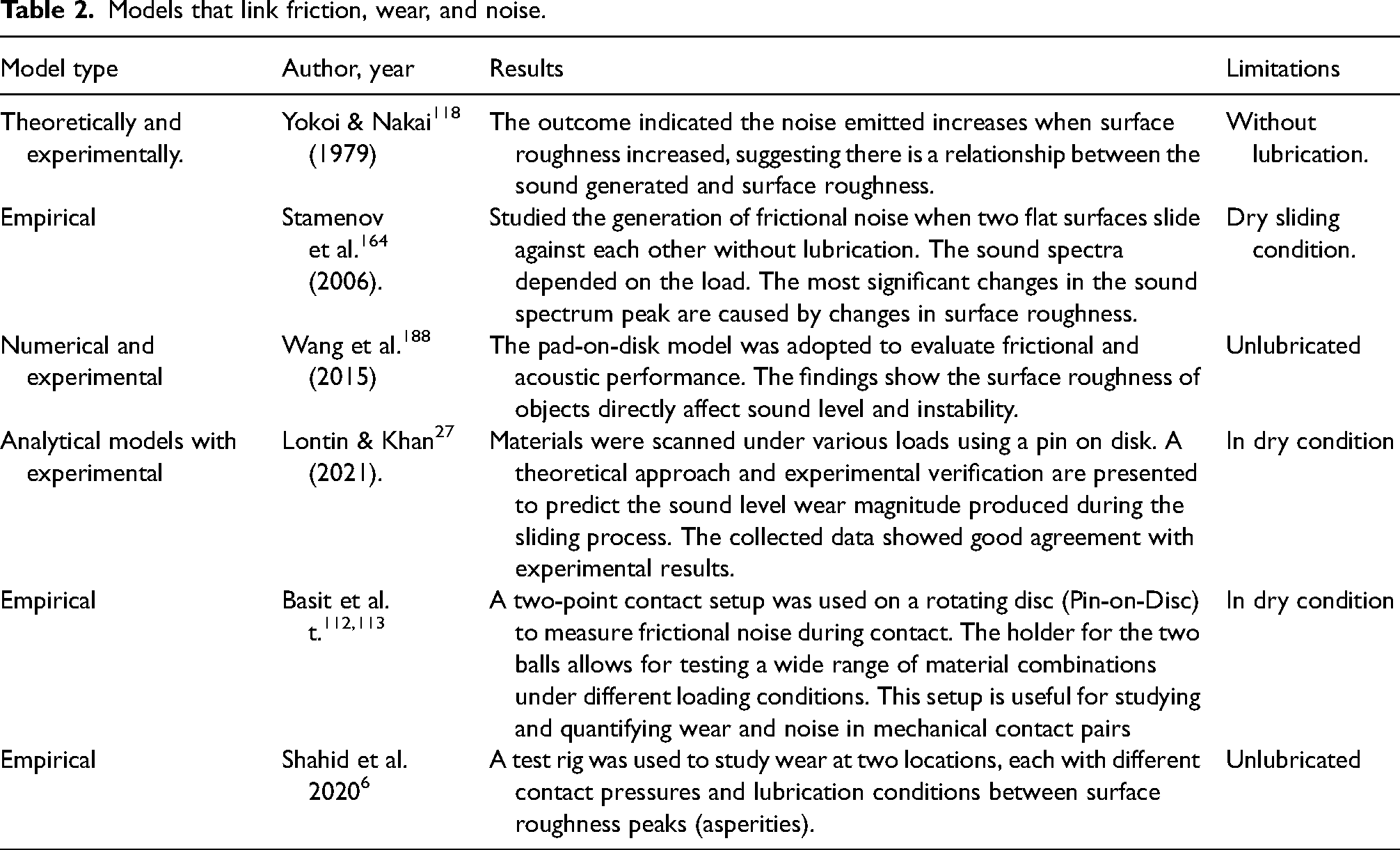
Table 2 provides an overview of some research that looks at the connections between wear, noise, and friction. The analysis was presented with special attention to studies that look at how contact conditions and surface roughness affect noise emissions. In addition to providing statistics on the model type, significant findings, and model limitations, each article highlights the context in which the research was conducted.
Models that link friction, wear, and noise.
Analytical models
The statistical model discussed by Lontin and Khan is derived from Hertzian contact theory and aims to describe interaction of surfaces with Gaussian distribution of characteristics.
27
This model sheds light on the behavior of AE by simulating integral equations from Hertzian contact theory using experimental data from actual surface topography.
129
Despite the limitations inherent in numerical methods, it adequately captures the primary behavior of the AE and provide a systematic basis for acoustic techniques in surveillance and diagnostics. An intriguing discovery is the linking between average surface roughness and the level of sound produced under various contact loads. Figure 17 demonstrates the link between surface roughness and sound pressure level for aluminum, bronze, and steel at certain frequencies, indicating that higher roughness correlates with increasing sound pressure. Notably, the correlation noticed between the mean roughness and the sound pressure can be represented as a linear relationship when using a logarithmic scale. This relationship can articulate referred to as equation (13):
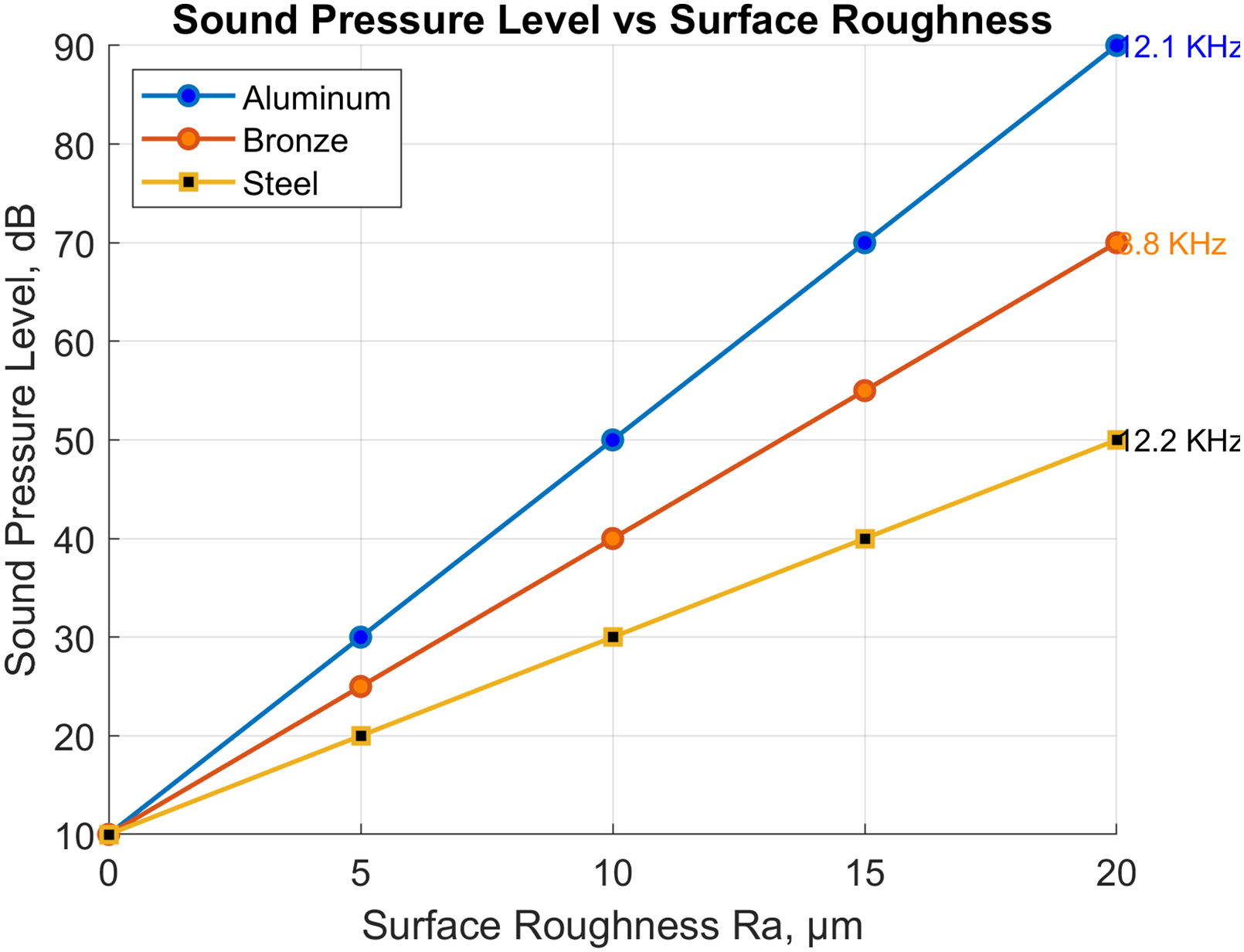
Relation between sound pressure level and surface roughness. 27
Lontin et al.
27
studied the advantage of using AE assuming asperity contact for the condition monitoring of mechanical systems, assessing the accuracy of model of their wear and airborne noise generation at higher temperatures.
16
A novel scale sliding friction model was introduced, derived using fractal theory. This model claimed to comprehensively encompass the entire sequence of elastic and plastic deformation events. From a theoretical perspective, most models for friction and wear have been updated to include friction generated noise.2,16 Generally, two primary wear mechanisms occur during friction processes: adhesive wear and abrasive wear. Wear can generate vibration of machine parts, radiated as airborne noise, ultrasonic vibrations in the material detected as AE, and heat detected as an increase in temperature,16,28 Lontin et al.
27
introduced an asperity-based model that used wear factors to predict AE during wear, such that the energy from wear-induced roughness fractures is converted into sound. In a pin-on-disc experiment, a single square asperity (the pin) and a tri-square profiled disc were used. Sound can be emitted from the collision of the asperities in two ways: first, through the elastic vibrations of asperities under elastic deformation, and second, from the fracturing of asperities upon impact. Wear is modelled as a deformation function,
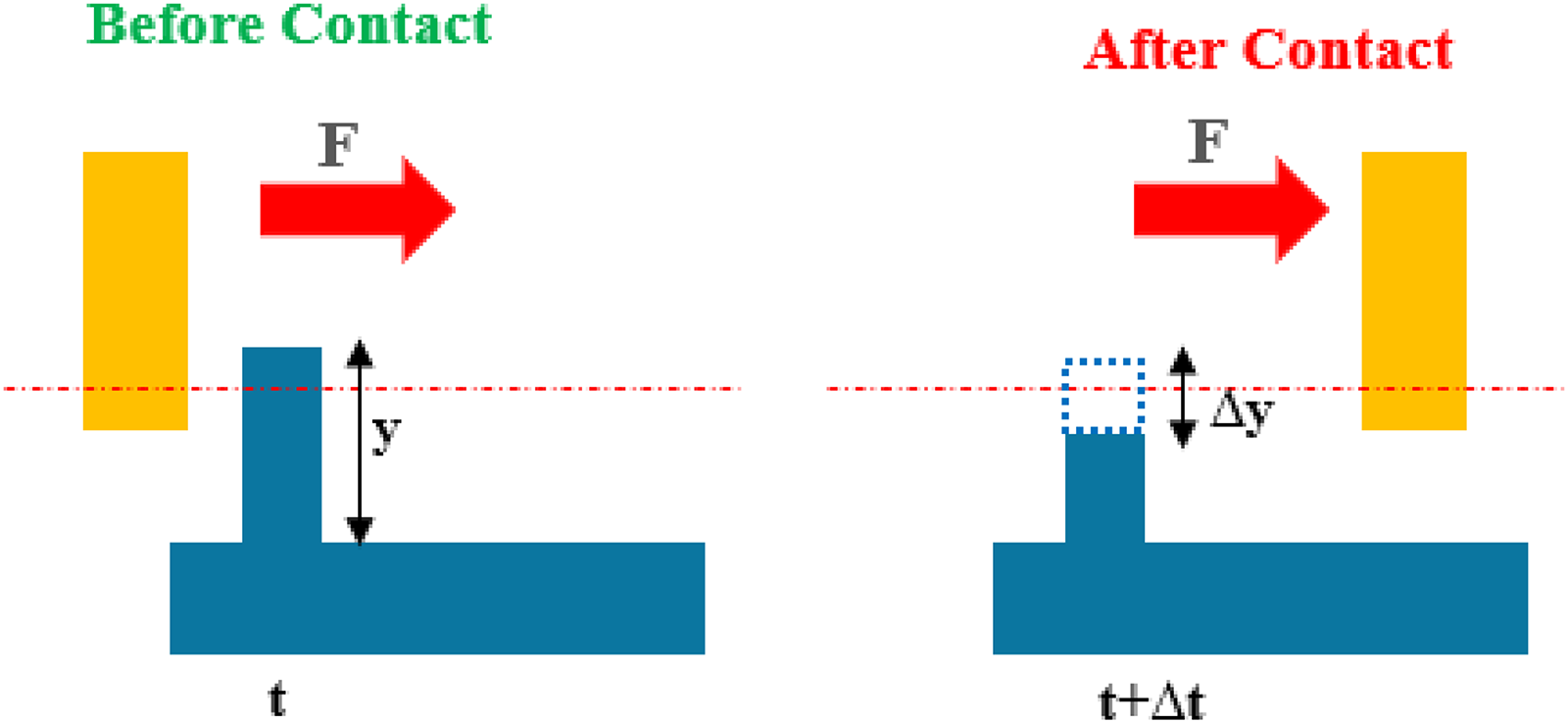
Variations in an asperity height under wear.
Basit et al.
15
investigate the correlation between wear and frictional noise for two-point contact on a rotating disc. They found a direct relationship between frictional noise and wear generation at contact. Airborne noise analysis was used by Khan et al. to assess wear in moving mechanical components with hard contact points.
53
Basit et al. used vibration analysis as Figure 19, the angular velocity of the disc was constant. The initial derivation was for displacement, 
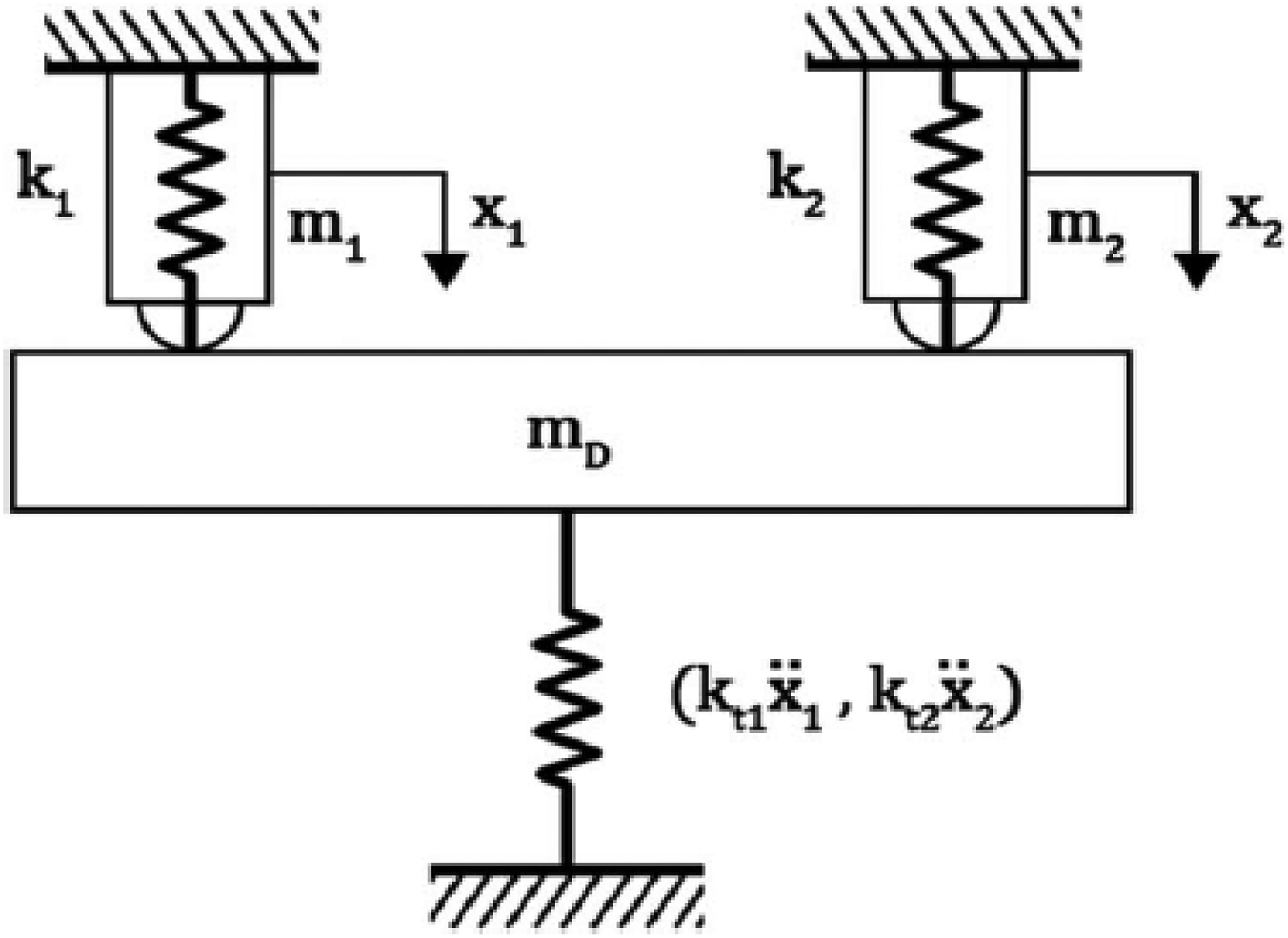
Analytical model of spring-mass system. 53
For determining frictional noise, the acoustic power equation (15) can be used:


The sound pressure level is:
Discussion
The study of friction wear in sliding contacts is important for gears, brakes, and a multitude of other mechanical components. However, there is a significant shortage of research into the relationship between friction, wear, noise produced and the role of lubrication. These gaps in current models need to be examined, it is essential that the study of contact friction establishes a relationship between friction, wear, and noise because it would be a valuable diagnostic tool. Existing models concerning the effects of surface roughness and friction on surface wear in mechanical systems have been presented and reviewed. These models have been broadly categorized into analytical, numerical, and experimental. The model developed by Lontin et al. 102 primarily depends on treating the roughness asperities in the contact area as square beams. It is supposed that no sound is emitted if the asperities undergo either elastic or plastic deformation, but this model becomes extremely complex when applied to frictional contact in the presence of a lubricant. Basit et al., 34 however, simplified the problem by using a pin-on-disc tribometer to which they applied the Hertz contact theory. It was assumed that the pin first contacted the disc, then slid across it with an elastic deformation, so that disc underwent wear. As a result, this model is more appropriate for applying lubricant and examining its behavior.
This paper has reviewed the simulation and modelling of contact mechanisms, emphasizing the forces exerted during contact and their correlation with the geometrical, material, and mechanical properties of the surfaces in contact. It has included the well-known GW model as well as others, many of which are adaptations of fundamental theory. The review initially addressed single-contact instances, detailing elementary Hertzian contact involving spheres, cylinders, and ellipsoids with multi-asperity contact models commonly employed for interactions of uneven surfaces. It has also considered broader factors such as the influence of friction, plasticity, adhesion, and nuanced surface features. Finally, it includes an examination of the contact-acoustics model, which investigates the dynamics and potential instabilities of sliding contacts and considers the usefulness of the generated acoustic signals. As evidenced by dry friction models, it has been confirmed that an array of mathematical, analytical and simulation models can usefully use to forecast friction and noise levels under diverse conditions. From which the noise signal can be taken as a measure of wear.
The primary wear mechanisms for moving surfaces in sliding contact are adhesive and abrasive wear. Frictional activities result in wear, producing both AE signals and airborne sound, and generate heat increasing the local temperature. However, numerous investigations have assessed the use of AE and airborne sound for tracking wear in sliding and rolling contacts and confirmed a correlation between the acoustic signals and both the extent and rate of material erosion.16,27,53,180 Nevertheless, quantitative assessment of surface wear in mechanical contacts during operation remains a complex task, but the intrinsic link between the AE signals and airborne sound radiated from the surface could facilitate the precise forecasting of wear.
All current models to predict wear and friction possess certain limitations with only a few investigating friction, wear, and noise under dry condition without taking the lubrication effect into account. There is a need for further advancements in modelling techniques and experimental methodologies, in particular consideration of the inter-connection between friction, wear, and noise generated by sliding surfaces needs to be further examined and contact friction models that establish inter-relationships should be developed. There is a gap in present understanding of the connection between wear-generated noise and emitted noise, which requires further investigation. Only two of the models currently in the public domain address the combined analysis of noise, wear, and friction, and they focus on scenarios without lubrication.
A wide range of mechanical system-dependent businesses, including manufacturing, heavy machinery, vehicles, and airplanes, greatly benefit from recent advancements in friction, wear, and noise modeling. Optimizing lubricants, surface textures, and components using precise wear and friction behavior predictions has the potential to significantly boost component longevity and efficacy. In industries like manufacturing and heavy machinery, where downtime can be costly, superior durability reduces maintenance costs and extends equipment lifespan by lowering the frequency of part replacements. All things considered; our findings emphasize how crucial it is to create thorough, accurate models that account for real-world variables. The integration of these advanced prediction models into design processes will stimulate innovation in the development of mechanical systems that are reliable and efficient under a variety of operating conditions.
Conclusions
The restrictions of current models in predicting wear, friction, and noise output are highlighted by this study. Regarding the limits of present models, which often do not account for the effects of lubricants, flash temperatures, and the influence of wear debris created by surface wear, it underlines the need for more breakthroughs in modeling tools and research techniques. Currently, a range of models that provide distinct perspectives are used to analyze friction, wear, and surface roughness in materials and mechanical systems. These models comprise analytical, computational, and experimental approaches. By developing an interaction between the features of the acoustic signals and the degree and rate of wear, various research has demonstrated the significance of acoustic emission and airborne sound for wear monitoring. The forces applied during contact and their relationship to the geometric, material, and mechanical properties of the objects in touch are the main topics of this study, which looks at the simulation of contact mechanisms. The bulk of models that attempt to forecast wear and friction have intrinsic restrictions; just a small number assess wear, friction, and noise while taking lubricating effects into account. With an emphasis on basic Hertzian contacts, frictional contact phenomena are first examined in the context of single contact scenarios. The impact of friction, plasticity, adhesion, and other surface characteristics are then discussed in further detail.
To generating more precise and comprehensive models, our analysis has underscored the need for further research to bridge the gaps observed, such as the impact of lubrication, flash temperature, and humidity. It also underlines how vital it is to explore contact mechanisms and how they relate to the mechanical, geometric, and material features of the surfaces that come into contact. The discussion establishes a powerful platform for further study in this area. This study illustrates the limits of current models in predicting wear, friction, and noise output. The research project examines the simulation of contact mechanisms and the relevance of understanding the forces applied during contact and their relationship to geometric, material, and mechanical aspects. It specifies two categories of friction models: boundary lubrication and mixed lubrication. The work also discusses the impact of adhesion, contact pressure, sliding velocity, surface texture, and tool material attributes on friction. The analysis underlines the necessity for future research to solve gaps in modeling tools and examine the relationship between contact mechanisms and mechanical, geometric, and material features of surfaces. The research underscores the need to include these impacts, expand dynamic modeling capabilities, and improve surface representations to produce more accurate and comprehensive contact predictions.
Footnotes
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Cranfield University.