
Abstract
Following the high clinical failure rates of metal-on-metal total hip replacements much work has been undertaken to investigate their poor performance. So called adverse loading scenarios such as acetabular inclination and microseparation have been attributed to indicators for failure of the implants. The ISO hip simulation standards (ISO 14242:1) still rely on gravimetric and ex situ analysis, considering only the total wear during articulation. Live in situ sensing can provide valuable insight into the degradation mechanisms of metallic interfaces under such scenarios. Clinical 28 mm diameter metal-on-metal components were articulated in a full-ISO hip simulator. The bearings were subjected to increasing angles of acetabular inclination and retroversion over short-term periods of articulation. Corrosive degradation was monitored during sliding by means of an in situ three-electrode cell. Changing acetabular inclination from 30° to 50° resulted in greater cathodic shifts in OCP upon the initiation of sliding; from −50 mV to as much as −150 mV. Under anodic polarisation (0 mV vs. Ag/AgCl) the resultant currents at the initiation of sliding also increased significantly with inclination; from approximately 4–10 µA to over 120 µA. Increased retroversion of 20° also resulted in increased anodic currents of 55–60 µA. Changing the nature of articulation demonstrated increased corrosive material loss compared to a standard ISO 14242 profile. The sole use of gravimetric assessment to determine a wear rate for hip replacement bearings under simulation can therefore neglect important degradation mechanisms, such as tribocorrosive loss in devices with metal sliding interfaces.
Introduction
The reintroduction of modern metal-on-metal (MoM) total hip replacements (THR) in the early 2000's aimed to provide longer lasting bearings for younger and more active patients. 1 Knowledge at the time held that the existing gold-standard metal-on-polymer (MoP) bearings produced wear debris within a ‘bioactive‘ range (0.1–1.0 µm).2,3 This debris can go on to illicit an immune response and cause osteolysis and bone resorption; resulting in loosening and failure of the implant. During articulation MoM devices produced wear debris below this range (< 100 nm) and were thought to be safer. 3 In vitro hip simulator studies also demonstrated up to 100-fold reduction in gravimetric/volumetric wear when compared to MoP bearings.4,5 This impressive wear performance was attributed to the lubrication regime the bearing interface was designed to operate under. Lubricant entrainment during articulation resulted in elastohydrodynamic lubrication (EHL) with a degree of the load supported by fluid pressure in a thin film of lubricant. Evidence of complete bearing separation, and thus no sliding contact, was noted by Dowson et al. 6 under in vitro hip simulation. MoM devices were therefore seen as a promising solution to osteolysis and aseptic loosening; the leading causes of implant failure and main limiting factor on the lifespan of a THR device.
This separation was only observed over portions of the simulation cycle however, and in ideal laboratory conditions. Clinically and in vivo MoM hip bearings still engaged in sliding contact, resulting in wear and damage/removal of the passive oxide on the surface of the alloy.7,8 The biocompatibility of CoCrMo alloy principally due to the thin (∼ 5–10 nm) surface oxide layer (95% Cr2O3) which forms spontaneously in air. It‘s mechanical removal during articulation exposes the bulk of the metal to corrosion processes. 9 Comparisons of the wear volume from MoM bearings to MoP devices only considered the total ‘wear‘ volume from the bearing and did not investigate the effects of corrosive degradation mechanisms specific to sliding metallic interfaces in detail. Mechanical loss of the surface passive oxide film caused higher levels of metallic debris and ions found in patients.10,11 Registry data, such as the NJR for England, Wales and Northern Ireland, demonstrated that particular device designs had substantial early failure rates. 12 Evidence also emerged in the literature that resurfacing and MoM THR bearings could be sensitive to the angle of inclination of the acetabular cup.13–15 Higher inclination may result in edge loading during articulation, causing higher contact pressures and compromise the load supporting ability of the lubricant. 16 Other studies have also highlighted a phenomenon termed ‘microseparation‘ whereby the bearing separates during the swing phase of walking gait. 17 This could be as a result of a number of factors such as joint laxity or component migration and causes a much more severe contact on the heel-strike of the next step. 18 The resulting impact may also affect the lubrication regime by interrupting entrainment of synovial fluid.
Most MoM devices implanted were large diameter (46–54+mm) implants; both resurfacing and traditional TJRs. This size range accounted for approximately 80% of primary procedures in 2014. 19 However much of the literature of recent years investigating such ‘adverse loading’ scenarios has typically focused on <40 mm bearings. The most popular size in this low diameter, traditional THR range was 28 mm and accounted for 11% of MoM prostheses in 2014. 19
Several studies have investigated acetabular inclination and microseparation under hip simulation20–23 and found increased wear of the bearing surface. This was coupled with a change in the typical wear scar shape and location to a stripe across the bearing; termed ‘stipe-wear’ which has been observed clinically in edge-loading bearings. 24 These studies have also driven changes to the ISO pre-clinical testing standard. 25 ISO 14242-4:2018 (Part 4) 26 introduces steep cup inclination angles and dynamic separation to hip simulation methods in order to assess the severity of edge-loading contacts. O‘Dwyer Lancaster-Jones et al. 27 investigated 36 mm ceramic-on-ceramic (CoC) bearings and found increased gravimetric wear. The most significant increase was at 4 mm medial-lateral translational mismatch and 65° acetabular inclination. The standard itself also presents data for 36 mm diameter metal-on-polymer bearings again showing increased gravimetric wear at 3 and 4 mm translational mismatch and high inclination. 26 To date the authors know of no studies which have examined metal-on-metal bearings to the new ISO 14242 Part 4 standard. Indeed it is unclear if the additions would have resulted in a clearer understanding of MoM failure mechanisms during pre-clinical testing.
The additions amount to a much more severe level of microseparation than used previously (0.8 mm)20,28 and still rely on gravimetric or volumetric assessment of the material loss. Previous work has suggested adverse loading such as microseparation can increase the level of corrosive degradation from the bearing surface by as much as an order of magnitude. 28 This shifted the importance of corrosive loss to total degradation (17%) as total gravimetric mass loss was only found to increase by two to three times. They also only make use of the simplified twin-peak walking cycle set out in the standard; as opposed to complex physiological gait and loading. Little has been added to the pre-clinical analysis of metal-on-metal bearings that fully elucidates the degradation mechanisms or goes beyond simple wear comparisons to metal-on-polymer bearings.28,29 Doing so will be critical going forward not only to ensure the degradation of devices with metallic sliding interfaces are fully understood, but to inform treatment of patients with such devices already implanted. This study therefore aimed to investigate the corrosive degradation of the bearing surface of metal-on-metal devices under increased acetabular inclination; a common adverse loading scenario for hip simulation.
Materials and methods
Hip simulation
Clinical 28 mm diameter metal-on-metal components were placed in a full-ISO electromechanical hip simulator (ProSim, UK). The bearings comprised of a high-carbon (HC) cobalt chromium molybdenum alloy (CoCrMo) femoral head and acetabular liner. The liner was held in place by a titanium alloy (Ti-6Al-4vs.) acetabular shell that was cemented into the cup fixture using laboratory grade poly(methyl methacrylate) (PMMA) bone cement. The femoral head was held in place using a 316L stainless steel modular taper adapter. Care was taken to seal this modular taper connection between the head and the adapter with silicone sealant. This was done to isolate the taper interface from the lubricant and thus ensure any electrochemical measurements only concerned the bearing surface. Polyether ether ketone (PEEK) fixtures were used to electrochemically isolate the components from the simulator. The lubricant used was foetal bovine serum (FBS) diluted to 17 g/L total protein content with phosphate buffered saline (PBS), as per the qualification set previously by Hesketh et al..30,31 PBS was used in order to facilitate the electrochemical measurement. Sodium Azide (NaN3, 0.03% (w/v)) was also added the lubricant to retard bacterial growth.
The bearing was articulated to 333,333 cycles at 1 Hz using the ISO 14242-1:2014 walking gait cycle, 25 shown in Figure 1. This is typically the first serum change point under an ISO simulation test and was done to begin the bedding-in process of the bearing. The serum lubricant was then refreshed and short-term articulation tests were commenced. The angle of inclination of the acetabular cup was varied from 30° to 50° in five degree increments. All angles were set against the horizontal plane of the simulator, as set out by ISO 14242-1. 25 The axial load to applied vertically down onto the acetabular cup; perpendicular to the horizontal plane. The bearing was then allowed to stabilize for an hour before the inclination was adjusted for the next test The maximum achievable inclination angle was limited to 50° for the 28 mm bearings used in this study by the design of the simulator. As the head was held in place by means of a vertical adapter (shown in Figure 2) a higher angle would have resulted in impingement at the bottom of the cup during articulation.
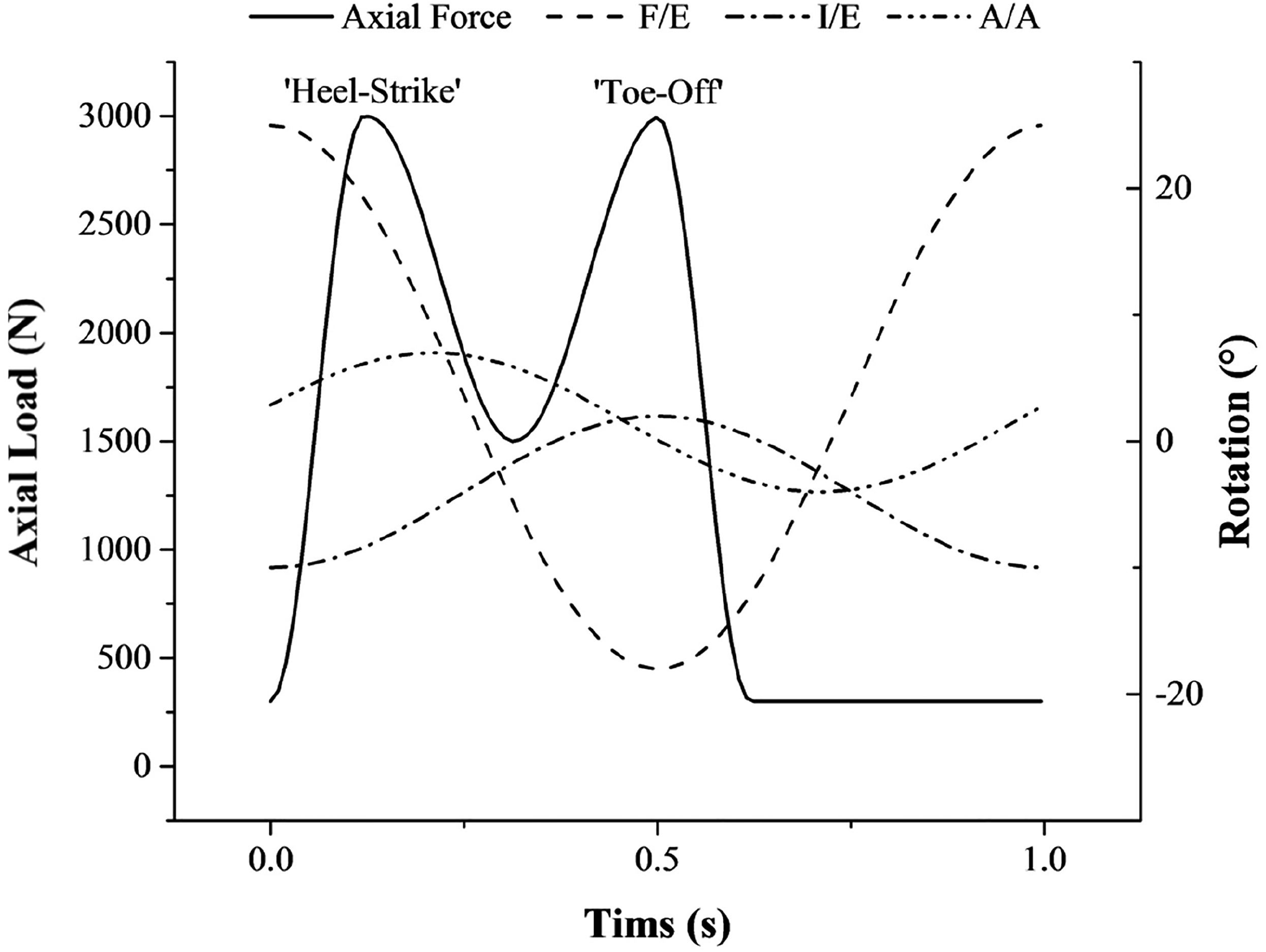
ISO 14242-1:2014 loading cycle showing axial force, flexion/extension, internal/external rotation and abduction/adduction.
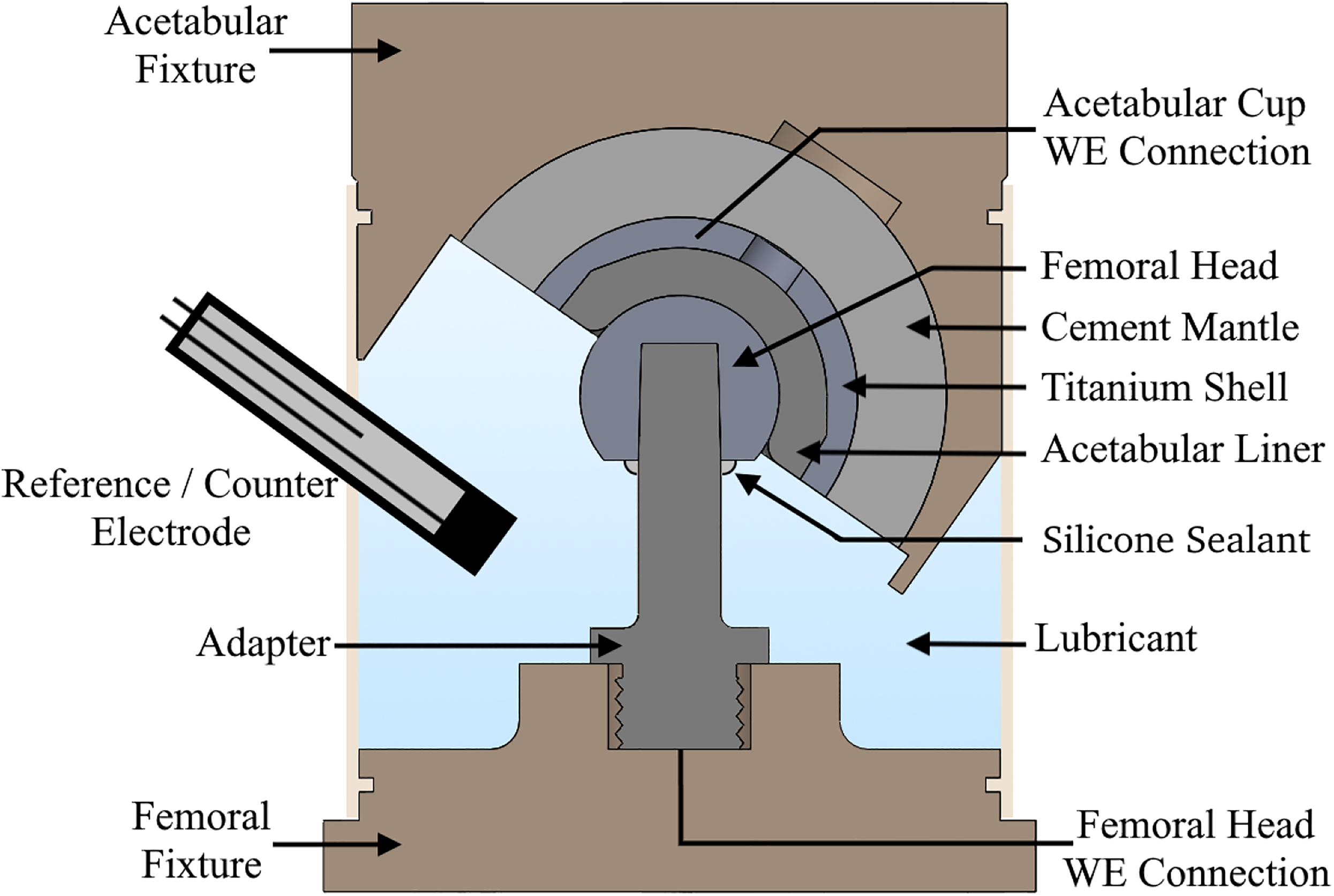
Schematic illustration of the Hip simulator test cell.
Electrochemistry
The simulator was instrumented with a three-electrode electrochemical cell to facilitate in situ measurements of corrosive degradation. A working electrode (WE) connection was taken from both the acetabular shell and 316L stainless steel adaptor. An illustration of the test cell can be seen in Figure 2. The working electrode therefore comprised of all component surfaces present in the cell which were exposed to the lubricant. A combination silver/silver chloride (Ag/AgCl) reference electrode (RE) and platinum (Pt) counter electrode (CE) probe completed the cell. All electrochemical measurements were performed using a PGSTAT101 Potentiostat (Metrohm Autolab, Netherlands).
Short-term profile
The bearing was then subjected to a short-term testing profile as detailed in Figure 3. The short-term tests consisted of a one hour static period of no sliding, during which the bearing was allowed to reach an electrochemical equilibrium. This was followed by 4000 cycles of ISO 14242 walking gait articulation and a final rest period. Open Circuit Potential (OCP) was monitored at 1 Hz continuously during the course of all tests. OCP gives a qualitative illustration of the electrochemical reactions taking place on the exposed surface of the working electrode.

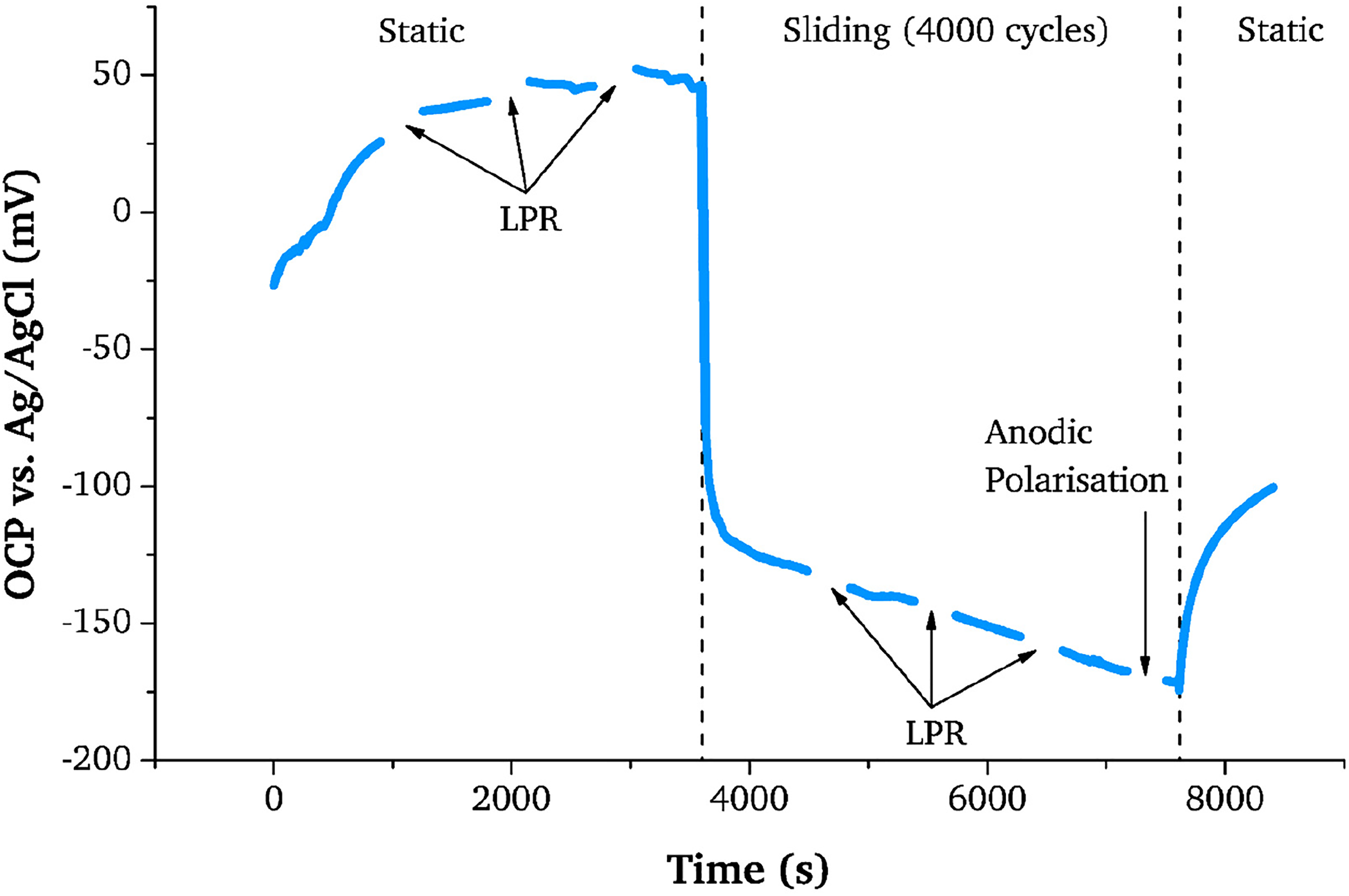
Short-term test profile consisting of a one hour static period, followed by 4000 cycles of articulation and a final static settle period.
During the static and sliding periods three linear polarisation resistance (LPR) sweeps were performed (±25 mV, 1 mV/s) to determine the polarisation resistance (Rp). This was then converted to a corrosion current (Icorr) for the bearing using the Stern-Geary equation equation (1) and standard Tafel constants (βa = βc = 120 mV/decade) as set out previously.28–30 The corrosion current is a direct measure of the loss of metallic ions from the working electrode as a result of corrosion.
Potentiostatic anodic polarisation (+50 mV vs. OCP) was also performed during sliding and the resultant anodic current transient was sampled at 100 Hz. This current was synced with the point in the cycle by also sampling a live voltage signal from the axial load cell on the hip simulator. This transient is a measure of the depassivation and repassivation kinetics of the protective oxide taking place at the sample surface. Previously this method has been used to investigate the links between lubrication (hmin) over the course of a cycle, and the depassivation of the metal sliding surface during articulation, with a direct measure of current. 29
Initiation of sliding
A second series of tests was performed to examine the behaviour of the bearing at the start of the sliding period. A new bearing was articulated for 333,333 cycles and the serum was refreshed (as described in Section ‘Hip simulation’). The samples were allowed to stabilize for 3600 s then polarised to +0 mV versus the Ag/AgCl reference electrode, as opposed to the working electrode OCP. Sliding was then initiated for 600 cycles and the resultant anodic current was sampled at 5 Hz. The experiment was repeated three times in ‘parallel‘ and ‘series’ configurations. Under the parallel configuration three repeats were performed at a given inclination before the angle was increased in 5° increments. Under series the angle was increased after each test then reverted back to 30°.
Finally, under this scenario increased retroversion of the acetabular cup was also investigated. Retroversion has been shown to also effect the lubrication and performance of a device.32,33 The acetabular cup was reset to 30° inclination and the retroversion was increased from 0° (coincident with the coronal plane) to 20°, again in 5° increments.
Results
Short-term profile
Figure 4 shows the evolution of OCP over the course of articulation for increasing angles of acetabular inclination. A static OCP of between 0 and +50 mV was established after 3600 s of stabilization for all angles of inclination. Upon the initiation of sliding cathodic shifts in OCP were observed. At 30° and 35° shifts of approximately −50 and −75 mV were noted respectively. The OCP also gradually trended more noble during sliding remaining at approximately −50 mV. When articulation was halted at 7600 s OCP immediately began shifting noble again towards pre-sliding static values. Greater initial cathodic shifts were observed at higher angles of inclination than at the low angles; both 45° and 50° shifted cathodically by approximately −150 mV. These initial lower OCP values quickly ennobled over the first 1000 cycles of sliding however, reaching values similar to those observed at 30° for the remainder of the test
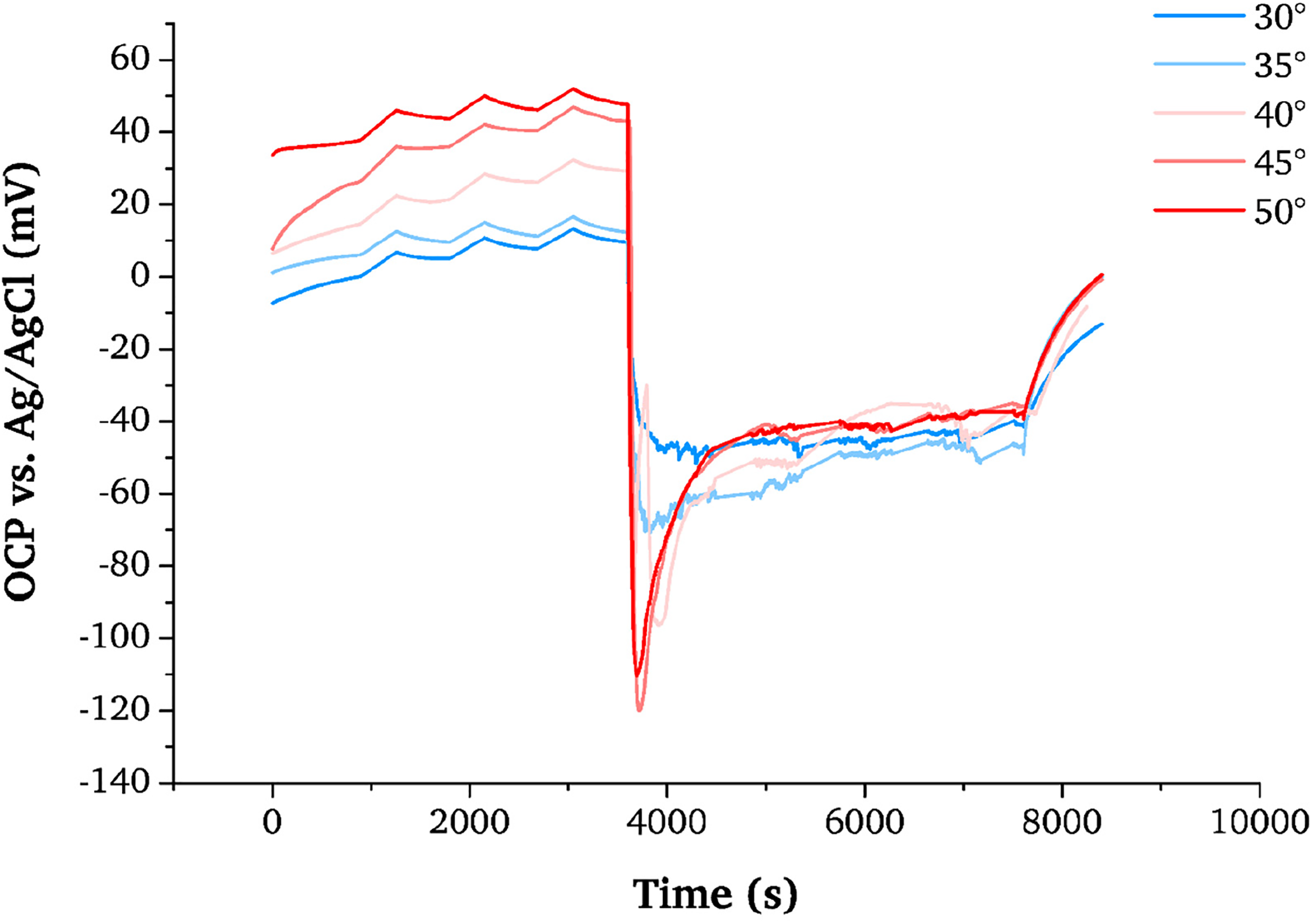
Open circuit potential for a 28 mm MoM bearing ar under an ISO 14242-1 profile for 4000 cycles at varying angles of cup inclination.
The corrosion currents (Icorr) during static and sliding conditions, determined from the polarisation resistance (Rp), can be seen in Figure 5. During static periods the passive corrosion current of the sample was calculated as approximately 2.0–2.25 µA across all angles of inclination. During sliding this increased to approximately 3.0–3.5 µA. There was no observed significant change in corrosion current as a result of increased angle of inclination (ANOVA, p < 0.05). The lack of any significant effect of inclination was also mirrored in the anodic polarisation current transients, shown in Figure 6.
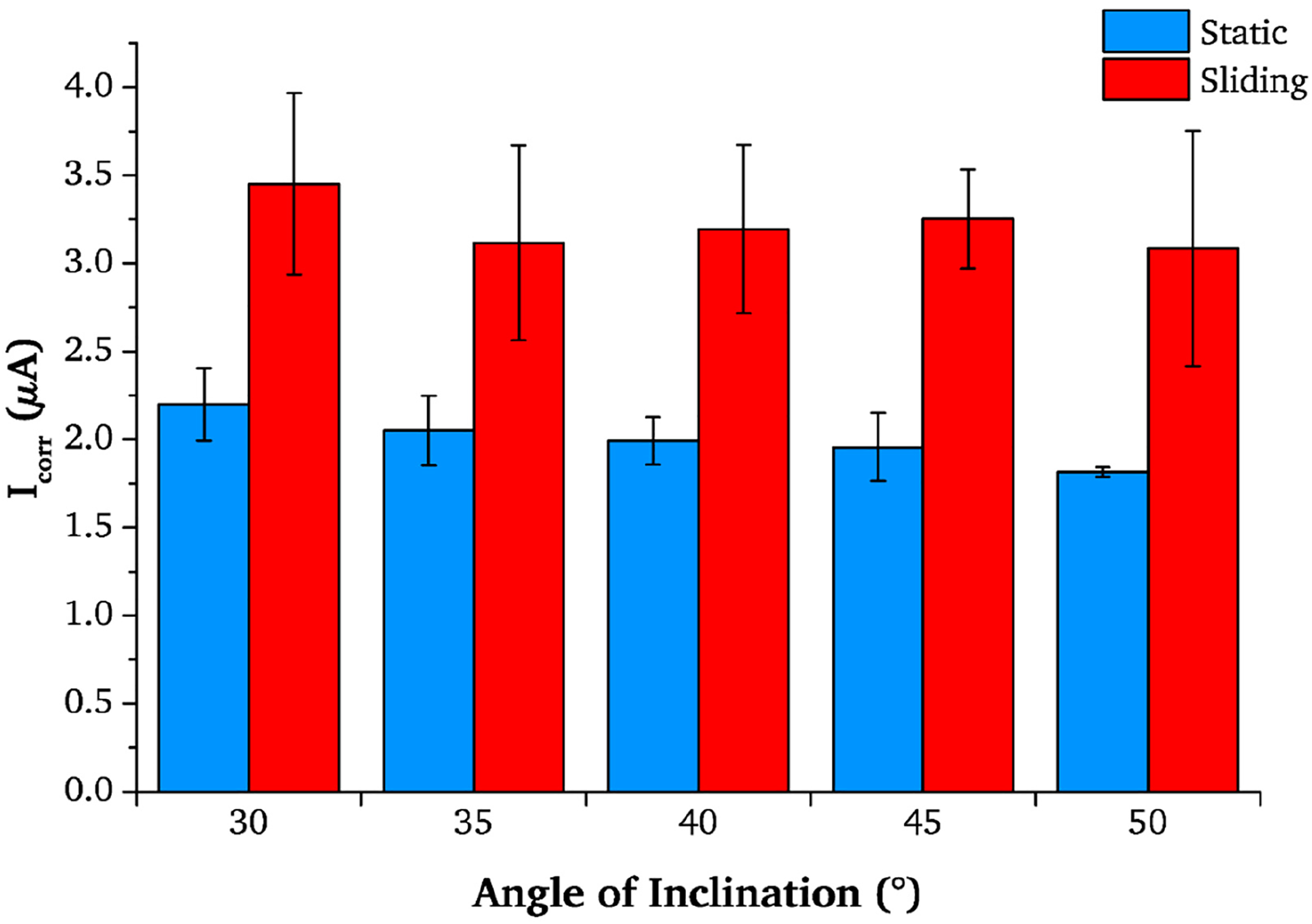
Corrosion current (Icorr) for a 28 mm MoM bearing under static and sliding conditions at varying angles of cup inclination.
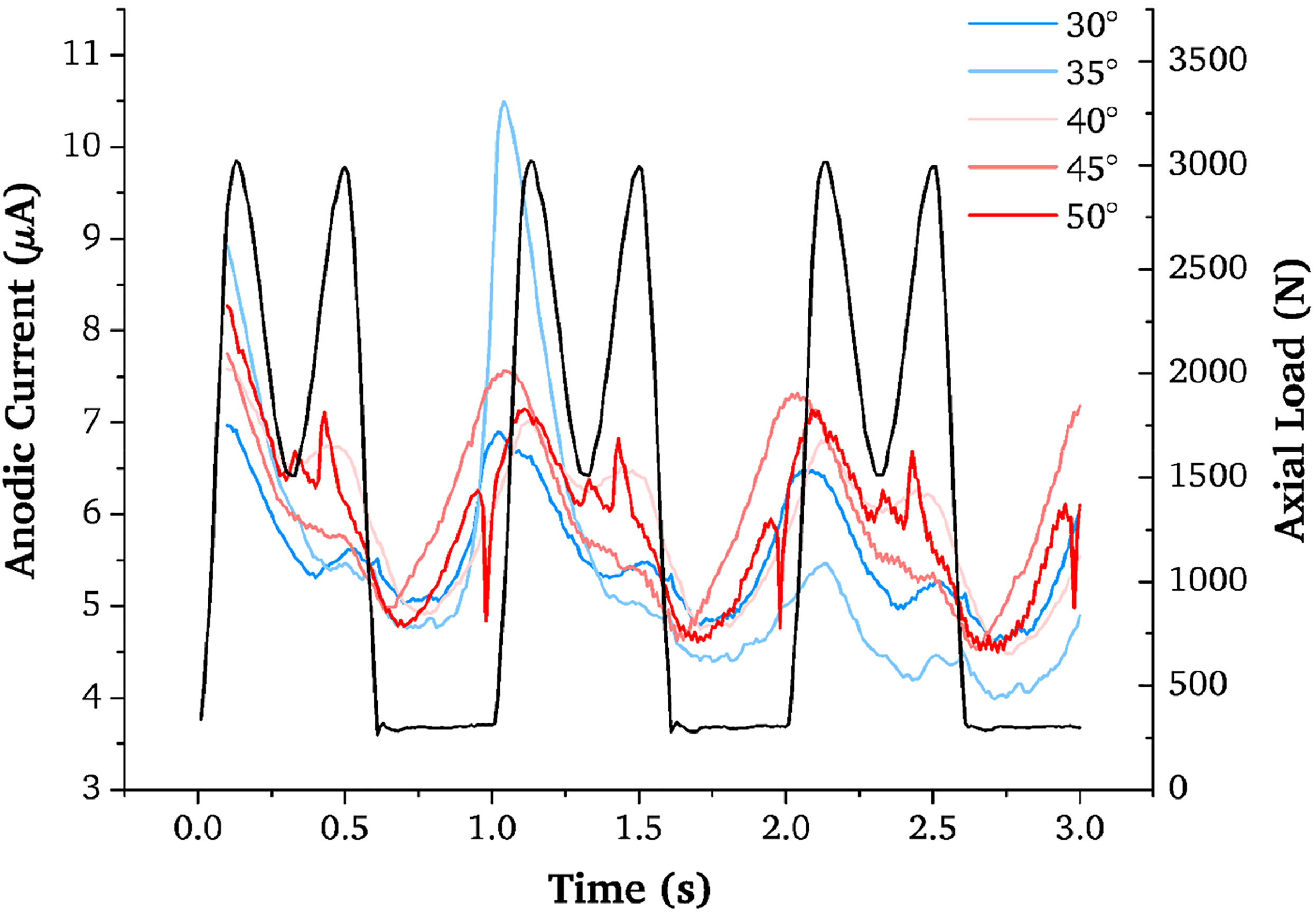
Anodic current transients (+50 mV vs. OCP) for a 28 mm MoM bearing articulating under an ISO 14242-1 profile at varying angles of cup inclination.
The anodic current transients performed near the end of the sliding period demonstrated repeating, cyclic patterns. This was consistent with patterns observed previously during walking gait hip simulation.29,31 A twin-peak transient, mimicking the Paul loading profile, was noted with a primary peak around the heel-strike load followed by a secondary lower peak. These peaks have been noted previously to coincide with the lubrication regime over the course of a cycle. 29 As shown in Figure 6 a general trend of increased anodic current with higher inclination was observed. This varied cycle to cycle however, and the peaks were often of a similar magnitude of between approximately 5 to 8 µA.
Initiation of sliding
The larger cathodic shifts in OCP for higher inclination angles, shown in Figure 4, indicated different conditions at the initiation of articulation which normalised before the first sliding LPR sweep was taken. Therefore in order to investigate the corrosive degradation during this period a second series of tests was performed. The anodic current transients for both parallel and series configurations can be seen Figure 7.
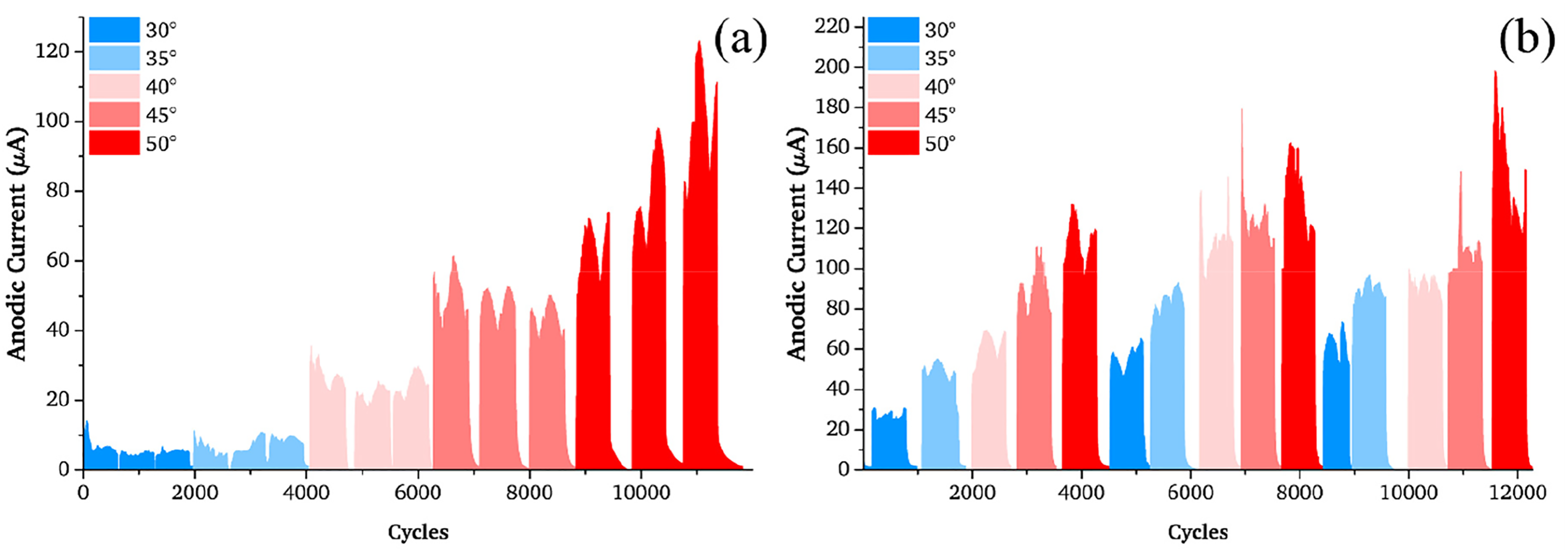
Anodic current transients (+0 mV vs. Ref.) over the first 600 cycles for a 28 mm MoM bearing articulating under an ISO 14242-1 profile at varying angles of cup inclination increased in (a) parallel and (b) series.
Under both approaches a clear trend of increased anodic current over the initial cycles as a result of inclination was observed. In ‘parallel‘ at 30° and 35° inclination anodic currents of approximately 4–10 µA were noted. This agreed with the steady-state values demonstrated both in Figure 6 and as reported previously.28,29 Upon increasing the inclination to 40° the anodic currents immediately increased to 20–40 µA and again to 40–60 µA at 45°. At the final 50° inclination the anodic current increased to 60–70 µA for the first repeat and continued to climb to over 120 µA by the third repeat. This represented over an order of magnitude increase in the observed anodic current as a result of a 20° increase in the inclination of the bearing.
Under the ‘series’ configuration a trend was observed of increased anodic current at lower inclination immediately following a high inclination test The series tests were started immediately after the parallel tests and at 30° (following the ‘parallel‘ 50°) a higher anodic current of approximately 25 µA was observed. As the inclination was increased the anodic current transient also increased to approximate averages of 50, 60, 90 and 110 µA. Upon reverting back to 30° even higher transients of approximately 50 µA were recorded and this pattern occurred again for the second and third repeats.
Retroversion
The anodic current transients for increased levels of retroversion can be seen in Figure 8 and a similar trend of raised anodic current was observed. At 0° version an average current of approximately 18 µA was observed, similar to the 30° inclination scenario run in series. Upon increasing the retroversion to 5° the current immediately increased to an average of approximately 24 µA. This trend continued with average currents of approximately 28, 45 and 55 µA for 10°, 15° and 20° retroversion respectively.
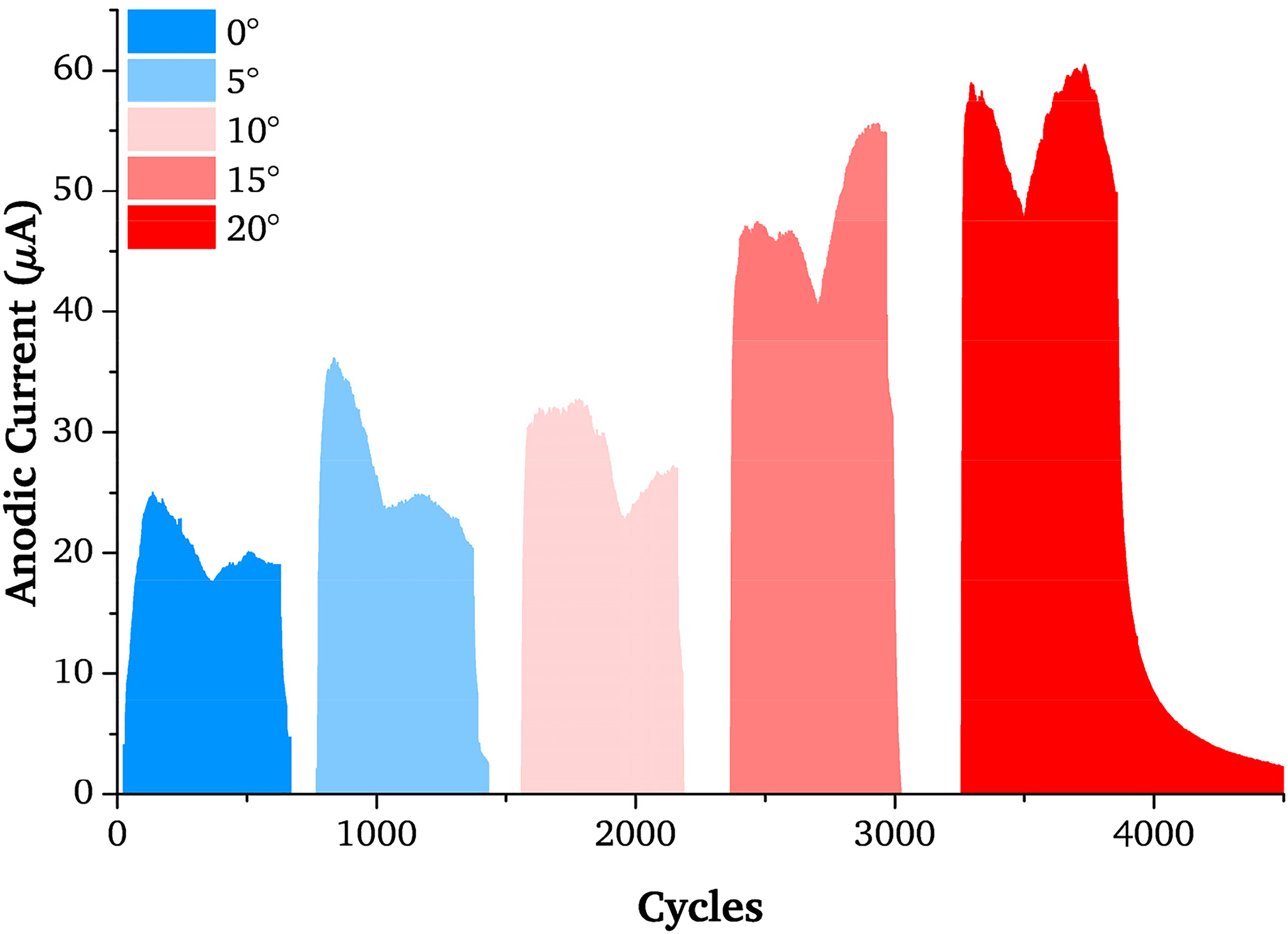
Anodic current transients (+0 mV vs. Ref.) over the first 600 cycles for a 28 mm MoM bearing articulating under an ISO 14242-1 profile at varying angles of cup retroversion.
Discussion
The study of malpositioning of the acetabular cup in THR has largely focused on hard-on-hard bearings. This is because such devices rely on the fluid pressure generated by elastohydrodynamic lubrication to support a degree of the load and reduce asperity contact during sliding. As mentioned Dowson et al. 6 showed complete separation of the bearing surfaces during gait cycles in a hip simulator. Myant et al.34,35 demonstrated the load supporting properties of the fluid pressure and also that it is relatively easy to interrupt the fluid film. Even single scratches on the bearing surface can reduce the film thickness substantially. 34 With high levels of acetabular inclination the contact area may be impaired, 32 and thus provide an avenue for this fluid pressure to escape the bearing entirely. For MoM devices, with sliding metallic bearing surfaces, loss of lubricant may be particularly devastating. Hadley et al.36,37 investigated stop-dwell-start testing and found the wear of MoM devices increased due to the loss of entrainment after dwell periods. Under these adverse loading scenarios, the contact and lubrication regime at the interface change drastically from normal articulation. It is therefore important to understand the degradation mechanisms during such events as well as their impact on total mass loss over long term testing.
In the case of the present study only the effect of 50° acetabular inclination on the corrosive degradation was examined. Under these parameters it was unlikely that the contact area of the 28 mm bearings was fully compromised by 50° inclination. It is possible to estimate the contact area or half-width (a) using Hertzian contact theory and an equivalent ball-on-plane model.
38
Equations (2) and (3) demonstrate this, where (W) is the axial load, (R′) is the equivalent radius and (E′) is the effective Young‘s modulus. It should be noted this estimation only holds where the contact half-width is significantly smaller than the bearing radius (<25%).
38


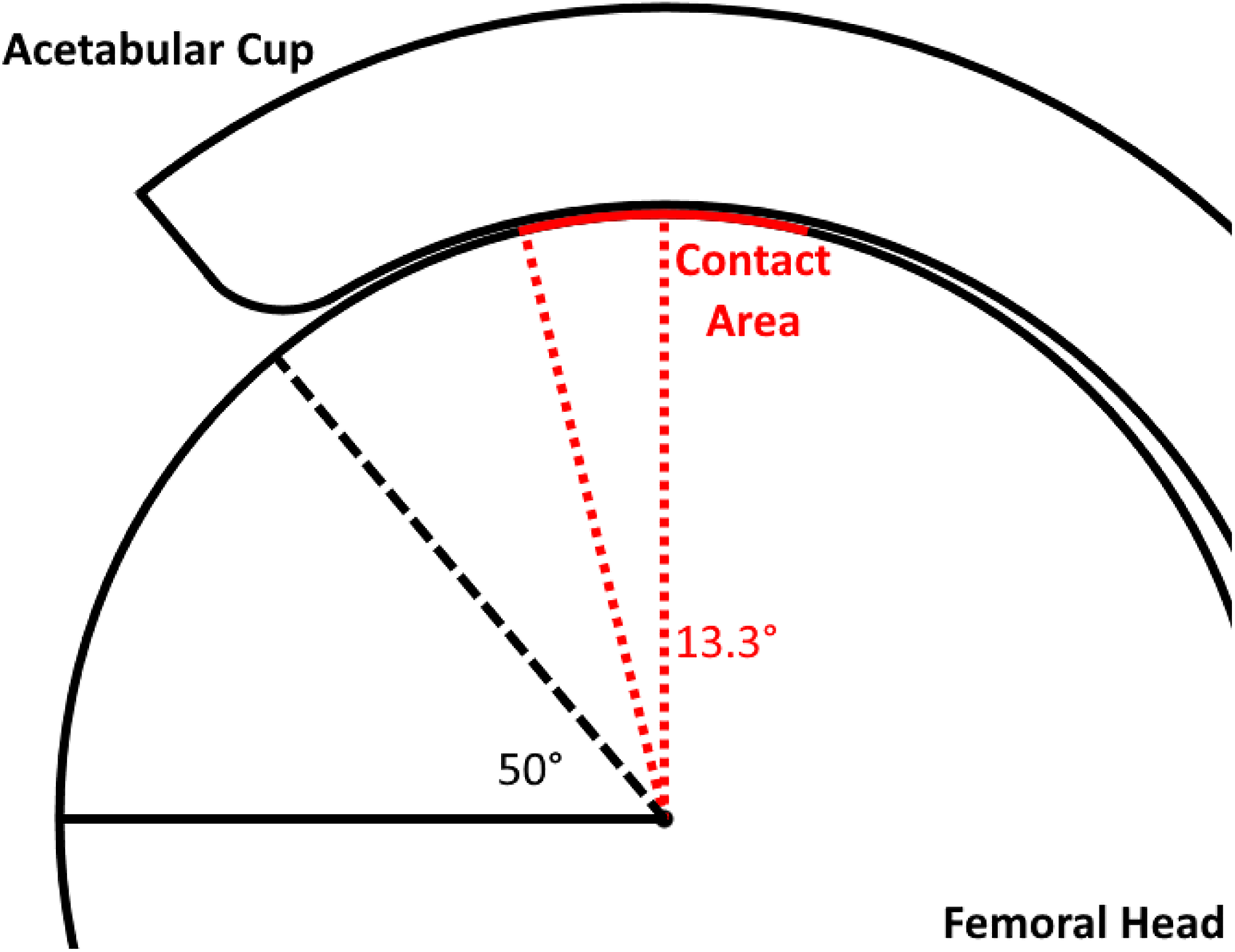
Illustration of the estimated Hertzian contact area during peak load (3000 N) for 28 mm metal-on-metal bearings.
Hip simulation studies, as set out by the ISO standards, are often ran continuously at 1 Hz under a simplified loading and gait profile for over 5 million cycles. This is in part due to practicality as the length of time needed to run out to such a high number of cycles can take months of expensive and labour-intensive simulator time. This is of course not how THR are likely to operate in vivo as patients will not walk under the same profile continuously. Hadley et al.36,37 demonstrated that simply adding dwell periods to the ISO 14242 walking profile interrupts entrainment and results in the next cycle operating in a partially starved scenario. Clues of these differences compared to real world performance can be determined with in situ electrochemical measurements.
The increase in anodic current noted at the initiation of sliding was not observed in the LPR data taken during the short-term profile tests. As can be seen in Figure 5 there was no significant increase (ANOVA, p < 0.05) in the estimated corrosion current (Icorr) with higher acetabular inclination. Currents were higher under sliding, as expected, but not under the more severe contact conditions. This was not expected as an increase in inclination was thought to result in a more severe tribological contact and thus higher corrosive currents. As can be seen from the OCP data however, electrochemical differences in levels of inclination were observed and noted to be transient at start-up. The cathodic shifts observed are typically associated with depassivation of the protective oxide film and increased corrosion of the alloy as the bulk material is exposed to the electrolyte. They were much higher at the start of each test suggesting a more severe level of depassivation (Figure 4). As noted, the OCP at each level of inclination did ennoble during sliding and eventually reached similar levels relatively early. This behaviour is similar to trends observed previously under standard gait wherein OCP gradually shifted noble during sliding. 28 This often occurred before the first LPR scan was taken in the short-term profile. Conditions at the start of sliding therefore could be very different than after a period of articulation. Even at the different inclinations studied here, the bearing reached similar operating conditions such that there were no significant difference in Icorr (Figure 5) or anodic polarisation (Figure 6). At the initiation of sliding however we can see notable differences such as the higher anodic currents noted in Figure 7. This initiation period would be relatively small during hip simulation but occur frequently during real-world use of the devices; such as when a patient changes gait profile or pauses articulation.
Under normal articulation in vivo the contact area on the bearing surface will also constantly be changing. Different areas will undergo sliding and depassivation as the patient undergoes different activities. As such there are likely to be several stop-starts and changes in the gait profile as different activities such as stair-climb or seating are undertaken. This will include periods of rest or ‘dwell‘ where no lubricant will be entrained followed by continued articulation. As we can see from the ‘series’ set of tests in Figure 7 increasing inclination resulted in increased anodic current. Interestingly however, when reverting back to lower levels of inclination the anodic currents were higher than observed previously. Fresh areas of the bearing surface would have been exposed to sliding, as would have been the case during some other change to the articulation profile. This could have included different gait-patterns as well as isolated adverse events such as a stumble. This increase would not have been noted running tests continuously over the same contact area. Dynamic testing and ‘daily-living‘ scenarios, as have been suggested by other studies,40,41 will advance the hip simulation methods significantly by more realistically replicating how THR devices are used.
The present study does have several limitations including limited sample numbers. Following recall of MoM devices from the market it is difficult to obtain clinical samples for study. Indeed much of the recent literature investigating MoM devices has focused on lower diameter bearings (<40 mm)20–22,36,37 despite the majority of implanted devices being of large diameter (40–56+mm). 19 This may be due to the difficulty in acquiring test samples following market recall of such devices. The 28 mm diameter bearings investigated in this study would be expected to largely operate in a mixed-lubrication regime and not more into EHL lubrication, full fluid-film, and separation of the surfaces as measured in larger devices. 6 A greater degree of entrainment and separation of the surfaces may have had large effects on the measured corrosion currents due to reduced depassivation of the surface oxide. 29 Also, due to the simulator design and the size of the 28 mm diameter bearings the maximum inclination was limited to 50°. Although higher angles would have been interesting, and have been observed clinically, this comes close to the maximum of 55° inclination prescribed by the ISO standard. 26 Indeed, the higher angle of 65° examined in other studies are often adjusted to represent in vivo angles. This includes a 10° offset to account for the direction of load on the hip simulators used by those studies and so is equivalent to 55° to the horizontal.23,27
While care was taken to seal the femoral head taper, the taper between the acetabular liner and shell was not sealed. This interface has been of increasing interest in recent years as a possible source of debris and ions.42–44 While not part of the bearing surface degradation here is still relevant to device performance. With increased inclination the load vector will have shifted more to one side of the cup, closer to the vertical, possibly resulting in a more severe fretting interface.
Choice of lubricant is also critical, with more modern versions of the ISO standard calling for higher levels of protein concentration (30 g/L) 26 and several studies demonstrating the effect on long-term wear performance across joint replacements simulator studies with demonstrated build-up of tribolayers.45–48 The constituent makeup of the lubricant can also have an impact on the electrochemical performance. The choice of protein concentration in the present study was used previously by Hesketh et al.30,31 and enabled direct comparison to previous tests run on the same simulator. More recently studies have demonstrated the concentration of serum albumin, presence of hyaluronic acid (HA) and ‘diseased‘ synovial fluid modifiers such as hydrogen peroxide (H2O2) can all effect the electrochemical response.49,50 Moving to more representative conditions, as would be found in patients after primary surgery, is important to accurately determine performance of devices. Whilst such lubricants are being investigated, they are not currently validated for pre-clinical assessment. The use of FBS remains necessary in the relevant joint simulation standards. 26
Metallic sliding interfaces in THR, coupled with complex lubrication regimes and the biological environment result in nuanced degradation mechanisms. Currently pre-clinical testing in hip simulators relies on post-test and ex situ analysis to determine performance and material loss. Advancements to the ISO 14242 standard 26 include adverse loading scenarios after evidence presented in the literature. But these changes do not investigate performance in situ and as such can neglect important phenomena occurring during and after adverse events or changes in articulation. The data presented in this study suggests that how hip simulation is currently undertaken can underestimate degradation and neglect important information in pre-clinical testing relevant to the real-world performance in vivo.
Conclusion
Changing gait profiles and isolated adverse events should be considered in pre-clinical testing as part of a realistic daily-living articulation. This should include in situ analysis of the sliding interfaces, such as electrochemical degradation in the case of metallic surfaces. Long term, 1 Hz cyclic articulation followed by bulk gravimetric or volumetric mass loss measurements can neglect important degradation processes during adverse loading scenarios.
Acetabular malpositioning (inclination and retroversion) resulted in significantly higher anodic current transients over the first 600 cycles of articulation.
After the first 600 cycles of continuous articulation the bearing appeared to stabilise electrochemically with an ennobled OCP and corrosion currents similar to those observed at low angles.
Upon increasing inclination and then returning to a standard 30° higher currents were noted than previously; suggesting adverse events may increase degradation during subsequent normal articulation.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship and/or publication of this article.