
Abstract
Discussions of beyond-human worlds have primarily considered post-anthropocentric models in response to climatic breakdown. However, we must also account for an increasingly techno-mediated experience in the landscape of everyday life through emerging pervasive and ubiquitous robotics in the built environment, particularly drones and their wider social impact. This paper presents two methods of understanding: speculative ontography for more-than-human understanding and design fiction as an alternate and heterogeneous world-building task that moves beyond corporate technological visions and “captured” futures. These methods are set in context with two specific diegetic prototypes: “Game of Drones,” a drone-gamified civic enforcement tool, and “Drone Logi*,” a drone logistics game for more-than-human alternative visions. The design fiction approaches develop an understanding of emerging robotic sentience within broader constellations and services.
Introduction
This paper explores what it means to be human in a world in which our relationship with the environment and technology is becoming increasingly entangled, and in particular, it unpacks what this will mean in relation to the future environments we will occupy. The discussion in this paper is situated in relation to beyond-human discourses that primarily consider post-anthropocentric thinking concerning climatic breakdown. 1 We build on such positions to account for an increasingly techno-mediated experience in the landscape of everyday life. In this beyond-human sphere (Whatmore, 2002), the term “Imaginary” is also often used to describe a set of cultural beliefs or expectations people share. Imaginaries are constructed through our understanding of the past, present, and future via real and fictional representations (Gonzatto et al., 2013). Drone imaginaries represent our potential future socio-technical relationships with drones based on perceptions influenced by their use throughout military history, current civil applications (Graae & Maurer, 2021), and representations in fiction. The paper will use critical discussions of drone imaginaries to highlight the relevance of beyond-human discourses to how we envision future environments.
The rise of consumer quadcopters since the early 2000s has drawn attention to vertical airspace as a volume and the atmosphere as a subject (Adey, 2010; Graham, 2016; Kaplan, 2020). Ole B. Jensen observes that urban planning typically operates in a 2D space despite fundamentally working with volumes. Drones can reveal these volumes, promoting “volumetric thinking”—a spatially sensitive perspective on social life (Jensen, 2020, p. 2). Cureton (2020) describes this volume as a “Hover Space” for drones generally operating between 0 and 400 feet (p. 8). Bradley Garrett and Karen Anderson have also advocated for the exploration of the drone’s agency in geographical and environmental imagination (Garrett & Anderson, 2018).
Critiques and research related to drones have also focused on neoliberal surveillance, drone ethics, and military applications (Bélanger & Arroyo, 2016). While drones offer numerous innovative and beneficial services, they have also been employed for malicious activities, such as delivering drugs into prisons and encroaching on restricted airports (Harriss & Mir, 2020). This discrepancy reveals that the human-centric drone usage depicted in commercial visions does not align with our world’s complex reality.
Drone technologies, users, regulators, and other “actants” interact to “mediate” what drones signify in the world over the long term (Verbeek, 2015). These ecologies encompass various non-human elements exhibiting agency, including business models, artificial intelligence, policy, regulation, and standards, aiming to enable commercial services and minimize undesirable drone uses. Design patents used by commercial organizations are also used to predict the future, as this paper discusses. Alongside these ecosystems, building on the work of Adam Greenfield (2017, p. 273), who discusses our increasingly networked lives, Greenfield suggests two points, a history of technological stacking and a fusion of various technologies. Applied by Cureton (2020, p. 76) for drones, discussed the various technologies that enable today’s capabilities and the fusion of these elements for drone avionics that allows the drone as a sensor to map and monitor space.
Regarding drone futures, our expectations are shaped by increasing visibility, spanning actual applications in everyday use (e.g., policing, news reporting, entertainment) and speculative future visions (e.g., Amazon delivery drones and drone taxis in Dubai). These commercial visions are often beguiling as they present drones in mundane near-future contexts in which drones have been readily adopted to provide seemingly human-centered perspectives of hassle-free services, which are often far from reality (Jackman & Jablonowski, 2021). It is obviously in companies’ commercial interests to seed an expectation that drones are an integral part of our future and will be integral in delivering this future, and this structure can be termed vapor worlds (Coulton & Lindley, 2017). As the speculative architect Liam Young (2019) states, as we turn our gaze toward the machine landscapes, we need to radically embrace our uncomfortable place in a world where we are no longer at its center (p. 13).
What we might call the machinic turn manifests in various forms, from data scapes and bitcoin mines to data centers and mega-industrial logistics hubs. These infrastructures permeate nations and facilitate the facets of day-to-day life. Alongside these morphogenic changes in the physical fabric, new mobilities from computer vision-based autonomous vehicles are emerging, requiring new standards and operation protocols. While the effects of the machinic turn are cross-cutting, one quantifiable measure is to consider the potential economic impact. For example, unlocking drone adoption could contribute 45 billion to the U.K. economy, with over 920,000 drones operating across sectors by 2030 (PWC, 2022).
Drone technology has advanced rapidly, often outpacing policy and infrastructure, and there is a lack of comprehensive consideration of societal implications. This progress has raised various multidisciplinary research questions relating to this machinic turn. This paper uses fictional representations of potential futures shaped by drones to open discussions about their consequences on the built and natural environment.
To explore this, the authors employ Design Fiction (DF), a design research methodology that combines rhetoric, diegetic prototypes, and world-building and draws upon the use of speculative ontography. This technique involves creating constellation diagrams to map the independent and interdependent relationships in potential more-than-human ecologies (Lindley et al., 2020). By applying these methods, the paper seeks to enable a deeper understanding of the complexities surrounding the integration of drones into everyday life and future urban environments.
Design Fiction and Methodology
With reference to Figure 1 (Attributes:
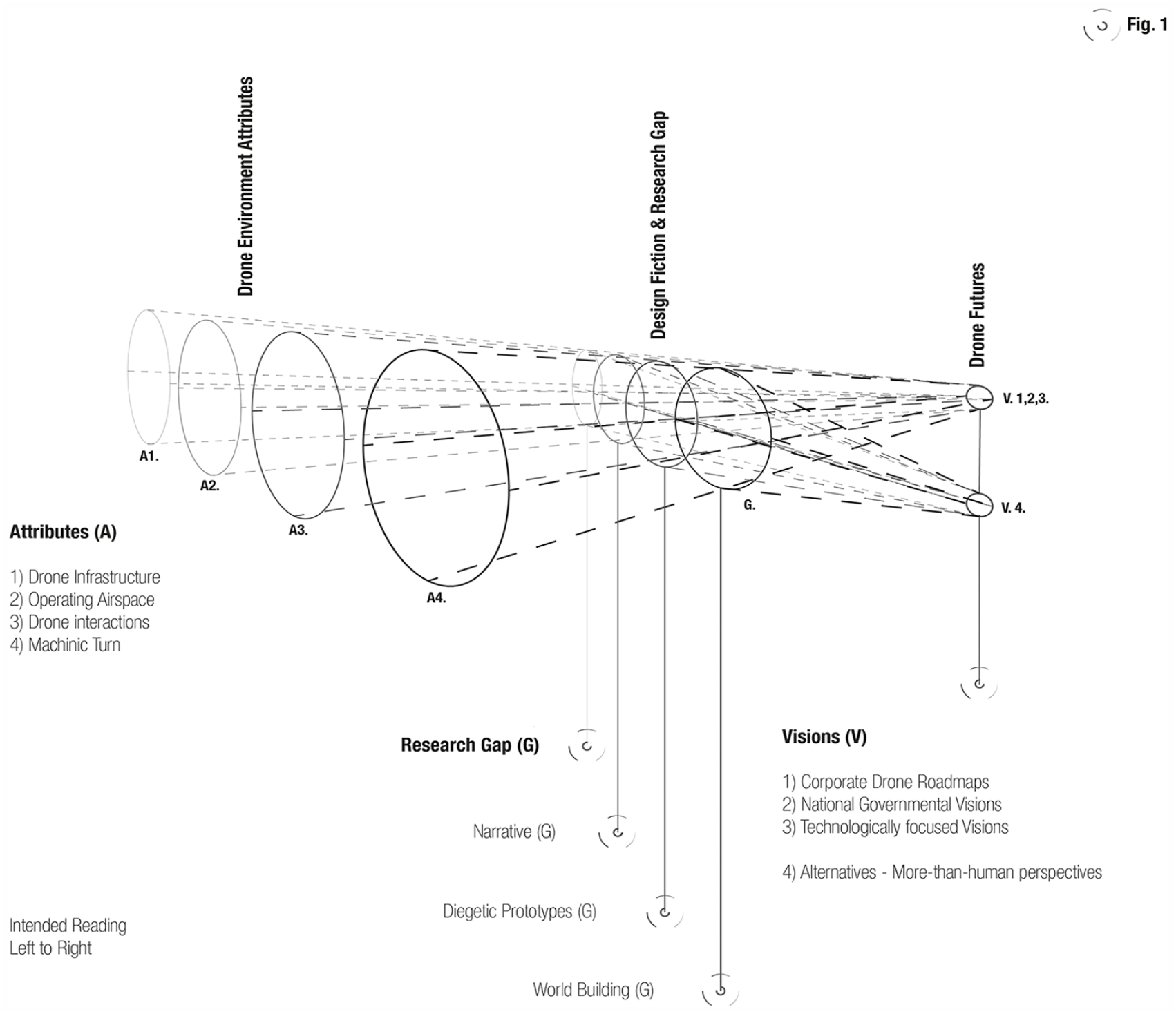
Unlocking Drone Visions Using Design Fiction.
More-Than-Human Design Speculative Ontography (Constellations)
The particular more-than-human approach presented is based on considerations drawn from contemporary object-oriented philosophies, discussed by Graham Harman (2005), Timothy Morton (20137), and Ian Bogost (2012). The main premise which binds these considerations is a rejection of correlationism, which relates to the proposition that perspectives derived by human minds and bodies are not the only ones worth considering. This view represents a flat ontology where “humans are no longer monarchs of being, but are instead among beings, entangled in beings, and implicated in other being” (Bryant, 2011). While this could be viewed as also flattening power structures, it is important to note that although “all things equally exist, yet they do not exist equally” (Bogost, 2012). Each of these human and non-human actants brings with it independent but interdependent motivations and perspectives (Coulton & Lindley, 2017).
Beyond the dismissal of correlationism, the particular interpretation of object-oriented philosophies (OOO) has been heavily influenced by Ian Bogost (2012) and his expositions in Alien Phenomenology. While Bogost’s construction of OOO builds on the work of others, his presentation is particularly accessible and relevant for design-led inquiry (perhaps due to his background as a game designer). Bogost coins a series of OOO-related neologisms—for example, Unit Operations, Tiny Ontologies, Carpentry—and one of these, the idea of ontography, is particularly useful when considering human and non-human assemblages.
Bogost’s adoption of ontography is an inscriptive strategy that exposes the abundance of units, their individual operations, and their inter-object relations—it is a catalog of being: “Ontography is a practice that exposes the couplings and chasms between units, where revelation invites speculation” (Coulton & Lindley, 2017). This resonates with Karen Barad’s (2007) consideration of agency not as a property but as something that emerges from how entangled agencies relate to each other.
We use the term speculative ontography when we are scaffolding potential DF artifacts. For example, consider Figure 2, which represents a fictitious CGI drone delivery service that also incorporates Blimps as floating distribution centers, when released via social media, fooled many people into believing that Amazon’s design patents for airborne fulfillment centers had been realized. The CGI is also reminiscent of previous futures, such as Archigram’s Giant Skyhook dirigible in the temporality of Instant City (1970).

ZOZI, Amazon Blimp, CGI Artist, Hiroshima, Japan, April 2019. Twitter Handle zozi009.
In Figure 3, we illustrate the typical human-centered consideration for the service in which the customers’ primary relationships are with the web service supporting purchasing and the drone delivering the purchased items. Typically, the rest of the system would be rendered opaque to the customer as they would not be considered primary to the activity. The center perspective allows us to consider an algorithmic perspective on how the drone and blimp sense and interact with their environment. Amazon blimp and drone services, for example, appear in 64 patents registered to date (Holland, 2017). Patents are often used to “capture” the future through near-future vapourware in which fluid worlds are presented, which have little substance and avoid complexity (Coulton et al., 2017). The final perspective of the OOO allows us to consider an alternate environmental impact of such a drone delivery service. A study by Joshuah K. Stolaroff et al. showed that in most cases modeled for drone delivery, “the life cycle GHG [Greenhouse Gas] emissions and energy use of package delivery by small drone are lower than ground-based delivery” (Stolaroff et al., 2018, p. 2). However, the service area covered through each standard drone range at 3.5 km will vary dramatically in how many units are required, as the study showed. Density and geography (environment) thus become critical in the feasibility of the drone constellation as a working service. Thus, such an ontography allows a range of perspectives to be considered in the design process beyond focusing on the user and the system implementation. This is by no means meant to be a definitive diagram of all perspectives and relationships; others could be included, such as nefarious actants, to consider the dark patterns such a system might enable.
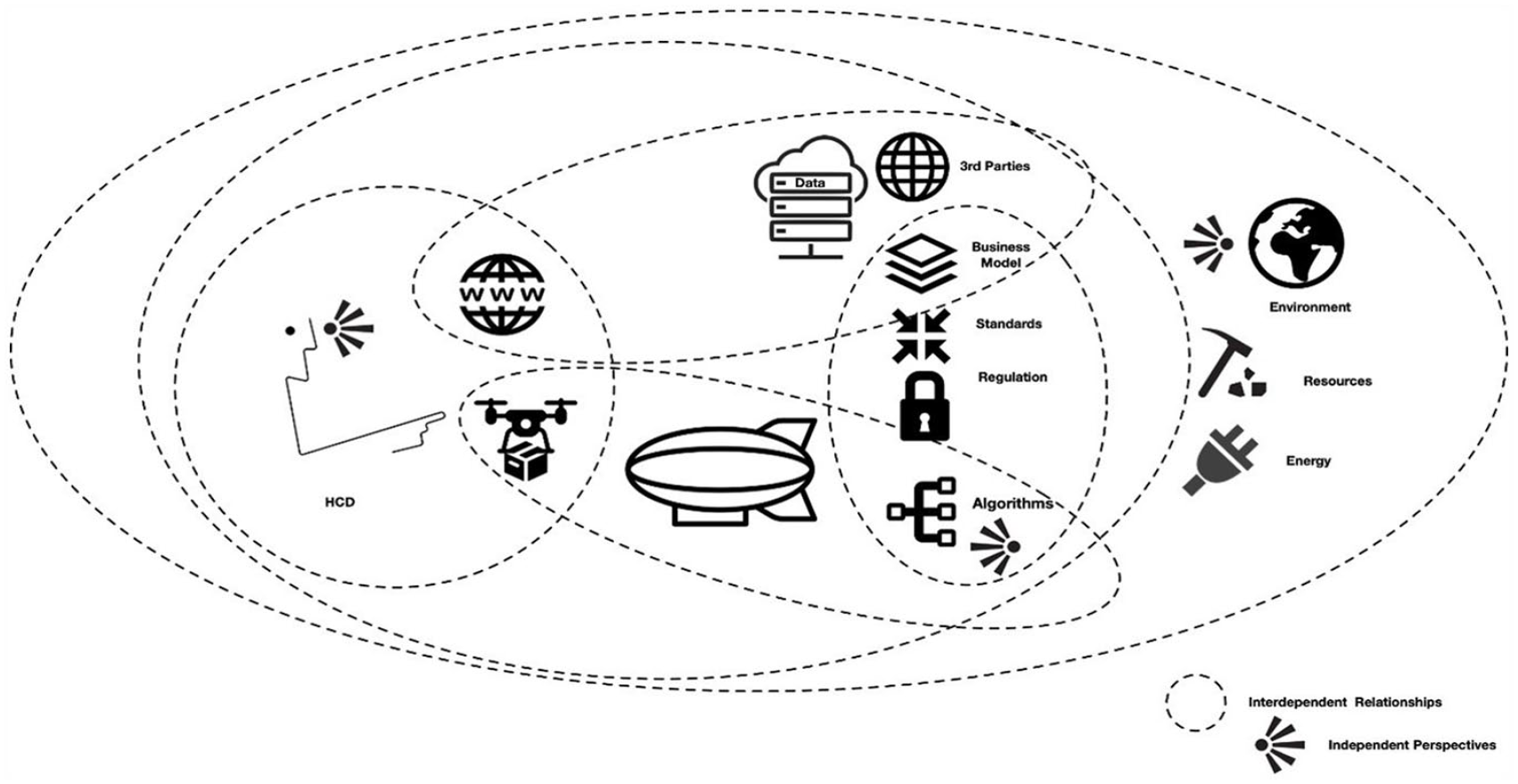
Constellation for Drone Delivery. 2020. Digital Diagram.
Such constellations are critical given that professional machinic integration of aerial vehicles sometimes misses the everyday implications for collective life. The latest iteration of ubiquitous drone technology has advanced quicker than the policy arena, nor has its impact on the built environment been fully accounted for (Cureton, 2020, p. 24). Fundamentally, there are grand challenges for drones, drone vision, machine learning (ML) as a way of learning as experience, and socio-technical drone integration.
Diegetic Prototypes
As a way of anticipating these challenges, we highlight the potential of DF which can effectively concretize the ecologies developed during speculative ontography. Here we draw upon the example of “Game of Drones” which was published as a “Work in Progress” paper at the ACM’s 2015 Annual Symposium on Computer-Human Interaction and Play (CHI Play) and explored a potential future trajectory of drone uses as part of a “gamified civic enforcement system.” The paper describes a change in European legislation that would allow the use of drones in the United Kingdom for commercial or civic tasks. The drones must only be piloted by individuals who are in possession of a “Drone Pilot Proficiency Certificate.” The “Drone Enforcement System” detailed in the paper is “gamified” by combining the enforcement tasks with a simple game mechanic that is controlled via a consumer console controller. Players earn points for completing the enforcement tasks via a game-like interface. The civic enforcement tasks in question relate to issuing penalty fines to dog owners who allow their pets to defecate in public without cleaning up their feces, and also parking enforcement (patrolling and issuing tickets to car owners where they are due). The paper details various aspects of the system and the user trial including (Lindley & Coulton, 2015):
Changes in legislation necessary to make the operation of drones in this way legal and regulated;
The statutory and safety requirements that must be met under the new legislation;
Technical specifications of the hardware used in the trial;
Elements of system infrastructure such as designs for the “Drone Docking Station” (for charging and storage of the drones) and signage used to inform the public of “Drone Enforcement Zones”;
The control system (Xbox controller to facilitate piloting of the drones by citizen users from their homes);
Details of the users involved in the trial (ex-military and ex-police personnel);
Description of the type of data gathered as part of the trial;
Preliminary notes on the findings of the trial;
A YouTube video that depicts the live system “in the wild” [https://youtu.be/6b_30d7yW2s].
The paper was never intended as a predictor of the drone future, rather it was highlighting real issues of the time, such as the lack of regulation and control over drone use. Moreover, it did prove remarkably prescient regarding future regulations and the use of drones. For example, at one point in the film, the drone can be seen interacting with someone illegally parking, images which mirror scenes of drones being used to enforce lockdowns during the COVID-19 pandemic in both China and the United Kingdom (2020). Fears are exacerbated through the reception of new technology, which is why speculative ontography and DF methods are relevant in reducing anxieties and providing a range of alternative environmental futures (Cureton, 2021). In one such example, various fears emerged regarding the purpose of drone missions in multiple drone swarm night sightings from December 2019, sighted flying in Colorado, Nebraska, and Wyoming in the United States. Sightings of a drone swarm at night executing grid maneuvers perpetuated further false reports and intense speculation of the culprits by the public. In the various investigations, correspondence between The Federal Aviation Administration (FAA) official Steve Dickson to FAA Chief of Staff Angela Stubblefield stated, “not too long ago we would have called these ‘UFOs.’” Stubblefield responded, “Yep! Now everything is a drone!” (FAA, 2019). These anxieties around drones and flight reflect in various public surveys indicating a high volume of concern regarding privacy and safety (NESTA, 2018). In another constellation, as previously mentioned, a “near future” projected by Superflux in the Drone Aviary project (2015) created five “frictionless” built environment drone scenarios, including a facial recognition surveillance drone and an advertising drone for personalized display. And finally, Alex Cornell’s speculative short, Our Drone Future (2013) presents a near future, in which cities use semi-autonomous drones for urban security. Human officers monitor drone feeds remotely, and data reports are displayed with a detailed heads-up-display (HUD) and communicated via a simulated human voice (designed to mitigate discomfort with sentient drone technology). Each of these examples of constellations is mapped through film and videography, presenting near futures and cuts to the “drone’s eye” showing its sentience while also playing on the tropes of current concern of Unmanned aerial systems (UAS). These artifacts remove themselves from contemporary debates on the social function of airspace, defense, and security.
World-building—Machinic Age
Technology roadmaps such as the European Union Aviation Safety Agency (EASA, 2020) have visions of drones and vertical take-off and landing craft (VTOL) concentrated on applications in global cities with beyond visual line of sight drone corridors for 2020 (testing was granted in the United Kingdom in 2021), manned urban aerial mobility around 2022, unmanned UAM around 2027, and cargo drones by 2030. Juxtaposing this roadmap, in the United Kingdom, a public perception study of drones took place, which raised a large number of concerns:
Potential impacts on wildlife and the environment, and if these can be mitigated to an acceptable extent;
How much noise pollution will it create, and how can this be mitigated?
How sustainable can the production and powering of vehicles be (taking batteries into consideration)?
How can these best work in unison with our existing infrastructure and transport?
Safety assessment for the likelihood and impact of collisions in the sky;
Level of cyber security threat, and how to protect against it;
How will future flight vehicles be affected by different weather conditions, particularly high wind?
A cost-effectiveness analysis compared to investing in existing alternatives (public transport, electric/hydrogen road vehicles)?
Assessment of likely impact on jobs and how skillsets can be re-purposed or retrained to mitigate this (IPSOS, 2022, pp. 43–44).
There are many corporate drone futures for cities, with two of the biggest areas being drone logistics and the use of drones in construction. However, many of these visions fail to acknowledge the social and technological challenges, such as those identified in the IPSOS survey. For example, Wing, a subsidiary of Alphabet, is establishing a Wing Delivery Network, a network service of delivery drones and charging pads with “autoloaders,” autonomous winches that auto-hook packages loaded at landing pads pulled up to the drone airframe. Wing’s Promotional Video 2 mixes existing prototypes and expands the delivery network showing seamless scaling and automation as a constellation. In addition, its animated diagram illustrates (2.33 m) optimized routing and efficient delivery. This is not a direct critique of Wing per se, but an example of how companies vision emerging technologies in a future world. In this case, existing prototypes, film media, and diagrammatic material set out its constellation system for the future of last-mile logistics. However, as part of many drone-based commercial solutions, the vision assumes possession of the lower airspace and often, through a need to establish a frictionless future, fails to account for the social implications of this new mobility and the potential of further inequalities. Such futures must account not only for these complexities but operations within the airspace, which is a form of infrastructure, but these operations require mobilities in three-dimensional segmented and volumetric airspace (Jensen, 2016). There are also environmental perspectives in these visions unaccounted for, such as habitat disturbance, small mammals, and birds to take into consideration (Hodgson & Koh, 2016, Mulero-Pázmány et al., 2017).
For aerial-based autonomous vehicles, not only do drones have to navigate, map, and hazard detect, but they also have to do so within an urban traffic management system (network of other drones and craft) and integrate with existing aerospace (UTM) (Majdik et al., 2017; Yuncheng et al., 2018). Thus, algorithms are required for navigation with self-learning capability for route improvement and (often) mounted sensors for hazard detection as part of the drone (UAS) (Hodge et al., 2021). How the drone senses and navigates the messy world needs to be revealed alongside the socio-technical-environmental aspect raises fundamental challenges and critical research questions.
Given the constellation and range of actors, a DF artifact was produced for this article called “DroneLogi” (Figure 4), a first-of-its-kind drone logistics game that revolves around network delivery and management in the Lake District, North-West, UK, a protected Area of Outstanding Natural Beauty (AONB). The purpose of DroneLogi was to build a future world based in 2035 with reference to the EASA Drone and VTOL roadmap in which drone logistics and autonomous vehicles are ubiquitous. Satellite and light aircraft remote sensing imaging and terrain were used to simulate the game world for real-time simulation. The game has a range of characters for players to choose from as a flat ontology, providing different perspectives on the implications of the networked system and infrastructure, including more-than-human perspectives through a variety of birds of prey, playing as a buzzard, hen harrier, and Goshawk. Players can also unlock a golden eagle through game progression, a rare sight for the Lake District. 3 Other airspace actors feature in DroneLogi, including a Perlan 2 Glider, 4 and a Lockheed Martin LMH-1 hybrid airship (as seen in Figure 2). Each player actor has a variety of missions to execute, and the drone network logistics affect each of these actors in terms of parameters and missions. AI Metahumans from UnrealEngine are utilized to understand public perceptions of the new system and generate DroneLogi missions for each game character. Some Metahumans, refuse drone flight proximity to their land, and others refuse planning permission for landing pads and charging stations, to which players must design optimal configurations and respond to live dialogue to comply with the ethics and habitat game parameters (Hildmann et al., 2019). The game parameters include ethics scores and environmental impact through mission route choices, habitat disturbance to other actors, maintenance (hunting while playing as a bird of prey), and safety in volumetric airspace. Players that go over the limits and thresholds of the parameters fail the missions. DroneLogi builds upon speculative design projects (Coulton et al., 2016) utilizing games engines for the exploration of environmental philosophies and impacts, including Walden a Game (2019), 5 exploring the perspective of Henry David Thoreau at Walden Pond in 1845 and Field’s City of Drone Project, 2017 by John Cale and Laim Young, exploring the machinic vision of a drone. 6 Such game systems also feature in flight planning simulation and UTM management through commercial companies such as OneSky or Aerospace Simulation by Ansys. 7 Additional playtests in the “wild” will occur with the wider public, and evaluations will lead to further game development and recommendations for this drone future. Such a speculative design process revealed several issues around the lack of constellation systems and simulations of the impacts of drone technology and its deployment in complex environments through multidisciplinary and more-than-human perspectives. DroneLogi as DF revealed the fundamental challenges to habitats in sensitive environments and, through a world-building approach, juxtaposed with corporate-led visions of drone logistics, such as Wing, offers viable alternatives and considerations for future implementation with specific consideration to ethics and environmental quality.

DroneLogi, Drone Logistics Game, Lake District, UK 2023 UnrealEngine 5, UnReal Metahumans, Cesium, LOD2.5. Buildings, Figma, TwinMotion. Author.
Summary
Drones will be one of the most visible aspects of robotic autonomy through their operation in what Cureton terms the “hover space” between 0 and 400 feet of airspace volume regulated for drone flights. The potential for drone applications is multifaceted and mapped in Figure 3. However, the paper has shown through speculative media and constellations that the ecosystems required to realize various drone futures will require much more than merely aerospace technology and corporate visions. Game of Drones and DroneLogi DFs reveal powerful research methods for unlocking alternatives and considering alternative futures through diegetic prototypes and world-building. This is especially pertinent in considering more-than-human perspectives in terms of both machinic and animal-based visions.
Drones have been explored through various disciplines and are a vital space of investigation to understand emergent technology. Greenfield describes how the stacking of technologies and the fusion of these create a networked urbanized life. Drones are also part of an ecosystem to which various technologies “fuse” and the “stacking” of these technologies creates current capability (Cureton, 2020, pp. 71–76). For example, technological capability is fused, that is, GPS satellite establishment, which is key for UAS navigation, stacked in terms of stabilized gimbals to HD camera mounts, then used for ML post-processing of derived imagery. These elements of larger constellations and ecosystems will contain components such as regulations, policies, and business models. Speculative ontological methods of inquiry, such as those offered by DF, can interrogate these entangled concerns to produce more nuanced modes that can anticipate potential challenges rather than reacting post-implementation. Such steps are critical for climatic and urban challenges and provide a productive counterpoint to the often-narrow approaches to imaginaries and futures that populate industry-led representations such as Amazon Air. These representations consisting of various elements such as design patents, promotional videos, and frictionless diagrams, which collectively form vapourware, attempt to shape future directions but often do not address social relations and the urban fabric. The design patent as an artifact has a dual nature and is one that presents a seemingly fluid constellation and yet, at the same time, deliberately obscures the messy complexity of the environment to which the artifact will be deployed. Thus, the authors have outlined various areas for further enquiry concerning developing an understanding of emerging robotic sentience within broader constellations and services using DF research methods. Of these constellations of pervasive and ubiquitous drone deployment, arguably the most important constellation worth enquiry is drone applications for environmental monitoring and ecology, given climatic breakdown. Through machinic vision of the drone, we can truly account for creating deep reportage and responsive future modes for environmental sustainability. Other beyond-human understandings and the new machinic landscapes that have arrived already in various forms deserve detailed cross-examination, for if not, the promises of pervasive and ubiquitous drones for urban efficiency, new mobilities, urban development, and management will result in the next wave of e-waste and its virtual presence will be like vapor and evaporate in the histories of failed futures.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.