
Abstract
Key Points
Professional ballet dancers exhibit less posterior inclination than experienced amateur dancers, especially during the ending phase of pirouettes with pointe shoes.
Professional ballet dancers finish turns with pointe shoes without jumping while some amateur dancers did jump.
The characteristics found in professional dancers would allow them to finish the pirouette stably and connect it to other movements while wearing pointe shoes.
Introduction
En pointe, in which weight is placed on the tiptoes, is fundamental practice for female ballet dancers with pointe shoes. Dancers start their training for en pointe with flat shoes first by supporting their body on demi pointe with metatarsophalangeal extension. Dancers who have reached a certain level, they begin dancing with pointe shoes1,2 and they start training to support their body with the metatarsophalangeal joints flexed. Point work increases demands for muscle strength, plantar flexion ankle range of motion, and a high level of balance control compounded by a narrower base of support than flat shoes.3 -8 These physical demands make it difficult for dancers, especially those in training, to dance stably in the complex movements of ballet. Even though balance control in pointe shoes plays a crucial role in ballet, the specific challenges associated with dynamic motion in dancing en pointe have not been fully understood.
In classical ballet movements, the ability to maintain balance en pointe is crucial for executing complex and graceful movements, such as the turning movement called pirouette. A pirouette starts with both legs standing, followed by a turn with support on a single leg, and finishes turning with both legs in contact with the ground without traveling while maintaining a stable upper body. Conventionally, dancers are taught to initiate pirouettes near their balance point, without actively adjusting balance during the turn, and to maintain a rigid body alignment and shape. One of the critical aspects of maintaining balance is the ability to control the position of the center of mass (COM) over the base of support and relative position of COM to the center of pressure (COP). 9 Regarding the maintenance of balance during the pirouette, some studies have focused on a straight-line inclination from the COP to the COM as a rotation axis. These studies revealed that less experienced dancers have greater difficulty in keeping the line straight than experienced dancers.10,11 During multiple turns, as well as the importance of gaining torque to turn,12 -14 making slight adjustments in the position of the base of support to maintain balance by smaller friction with decreasing vertical ground reaction force (GRF) is also reported. 15
In addition, another study found that ballet dancers showed greater vertical maximum GRF compared with non-ballet dancers during initiation phase of single pirouette. 16 On the other hand, vertical maximum reaction forces throughout the single pirouette motion between novice and experienced dancers were compared and no significant differences were found. 11 Considering these studies, it is assumed that the vertical GRF during the initial phase of pirouette plays a role in enabling dancers to shift the COM upward efficiently and complete a rotation. Moreover, an increase in vertical GRF would potentially result from the contributions of the increased rigidity of the outsole and upward movements of the COM when dancers turn with pointe shoes. While the maximum GRF with pointe shoes during jump landing has been investigated,17,18 the influence of pointe shoes on vertical force remains inconclusive during pirouette, which is performed as frequently as the jumps.
It is worth noting that previous studies regarding the pirouette were conducted using flat shoes or bare feet among amateur ballet dancers whereas female ballet dancers mainly have to dance while wearing pointe shoes on the stage. It highlights the gap in research specifically addressing the effects of pointe shoes during pirouettes in highly trained dancers. In pointe shoes, it is presumed that controlling the COP and COM becomes challenging, which increases the difficulty of adjusting the tilt of this axis of rotation. Therefore, it is necessary to investigate the differences in balance control as well as GRF during the pirouette movement, particularly when wearing pointe shoes. Herein, this study aimed to determine the differences between professional and experienced amateur ballet dancers in their ability to perform the pirouette with pointe shoes focusing on rotational axis and vertical GRF. We hypothesized that professional ballet dancers have a smaller angle of inclination during the entire motion and greater GRF in the initiation. The results of our investigation could potentially enhance comprehension of the biomechanics involved in executing a pirouette and help in the development of training programs for ballet dancers to enhance balance control during the pirouette, especially wearing pointe shoes.
Methods
Subjects and Experimental Protocol
Eight professional female dancers who were part of ballet companies (age: 23.6 ± 2.2 years, stature: 160.6 ± 3.3 cm, body mass: 44.9 ± 3.3 kg, years of experience: 17.8 ± 3.8 years, age at which they started wearing pointe shoes: 9.6 ± 1.5 years, practice time: 16.8 ± 6.3 h/wk) and 9 experienced amateur ballet dancers (age: 21.9 ± 2.6 years, stature: 156.0 ± 5.8 cm, body mass: 46.2 ± 3.6 kg, years of experience: 17.4 ± 3.5 years, age at which they started wearing pointe shoes: 9.6 ± 1.5 years, practice time: 5.5 ± 3.3 h/wk) participated in this study. There were no differences in basic information between 2 groups except for practice time (P < .001).
Instrumentation
Retroreflective markers were applied to 35 body sites based on a Plug-In Gait full-body model. An 8-camera motion-capture system (Vicon Nexus, Vicon Motion Systems Ltd, Oxford, UK) at 250 Hz and 2 force plates (Kistler Instruments, Hampshire, UK) at 1000 Hz, which were covered with linoleum, were used for data collection. Vicon Nexus software (version 1.8.5, Vicon Motion Systems) was used to collect and process the data. Two static standing trials were captured before the dynamic trials to calculate the joint centers.
Procedure
The participants wore their own pointe shoes and performed the preferred side single pirouette en dehors until they completed 3 successful trials. All participants started from the fourth position and finished in the fifth position in classical ballet (Figure 1). In the beginning of the fourth position, the dancers stood on the 2 force plates with the left leg forward and finished on one force plate with the left leg forward. Marker trajectories and GRF data were recorded continuously throughout the turn.
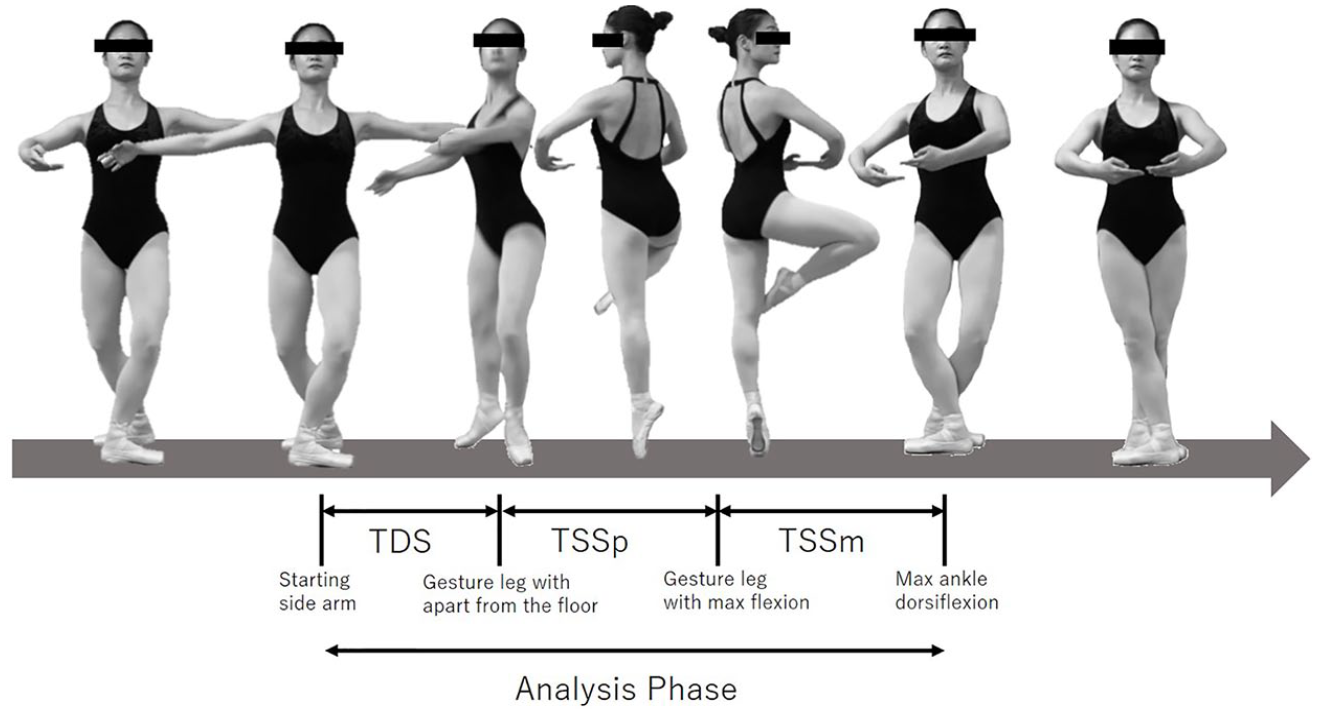
pirouette en dehors and the phase division.
Coordinate data were captured using Vicon Nexus software (Workstation, Oxford Metrics Ltd., Oxford, UK) and filtered using a second-order, zero-lag Butterworth-type digital filter with a cutoff frequency of 6 Hz. The GRF data were filtered using a second-order, zero-lag Butterworth-type digital filter with a cutoff frequency of 300 Hz. These filter settings were the same as those in previous studies.13,19 The biomechanical analysis focused on the inclination angle between the vertical and the COP-COM line during the turning phase. The whole-body estimated COM was calculated from the center of mass of all modeled segments.
Data Analysis
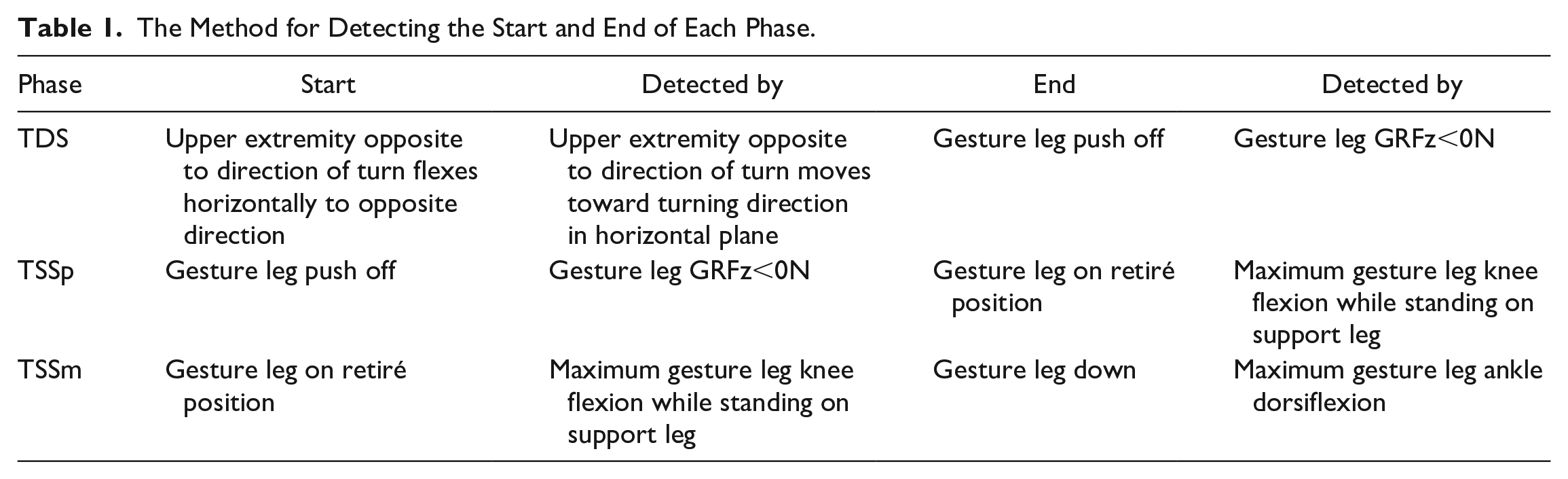
The measurement data were analyzed using Python (ver. 3.10.4). The pirouette movement was divided into 3 phases: preparatory, turning, and ending (Figure 1), with a focus on the turning phase. The turning phase was further divided into 3 sub-phases, namely turning with double-leg support (TDS), turning with single-leg support in pre-swing (TSSp), and turning with single-leg support in mid-swing (TSSm), in line with previous research.10,20 Table 1 shows the determination of each phase.
The Method for Detecting the Start and End of Each Phase.
The COP during the trial was calculated using the equation from a previous study10,20 as:
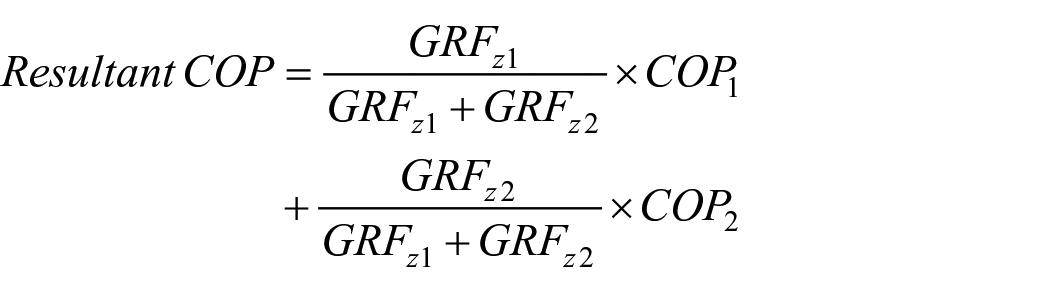
where GRFz is the vertical GRF and the lower-case suffixes denote the first (front force plate) and second force plates (backward force plate), respectively. The resultant COP positions were defined by the global coordinate system.
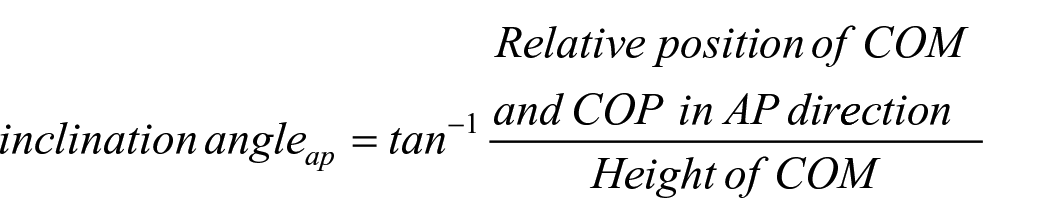
We calculated the relative positions of COM and COP as well as the vertical height of the COM to determine the COP-COM inclination angles in both the anteroposterior and medio-lateral (support-gesture directions) with respect to the pelvic direction as follows:
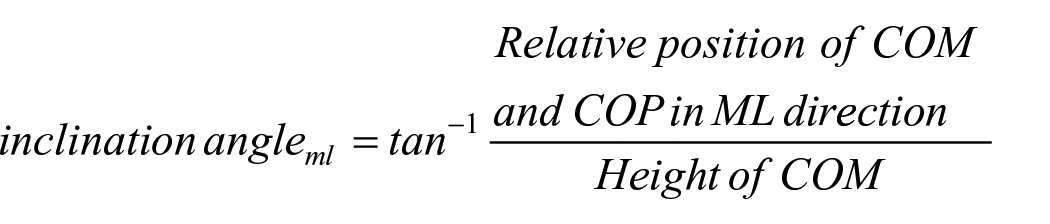
To ensure consistency across all phases, the inclination angle data for both COM and COP were normalized to 100% using 101 time points for each phase. However, some participants were seen to use a jump-up strategy during the TDS and TSSm phases of the pirouette. To address this, linear interpolation was used to fill the gaps in the resultant COP, and the time spent during jump-up was calculated for both phases as a percentage of the total time. The analysis focused on the maximum anterior-posterior (+: incline to anterior, -: incline to posterior) and medio-lateral (+: incline to gesture leg side, -: incline to support leg side) inclination between the COP-COM line and the vertical axis during each phase. In addition, maximum vertical GRF was observed by normalizing to body weight during each phase. Figure 2 shows an example for each participant of 3D mapping for the one-trial COP-COM displacement and COP-COM inclination line.
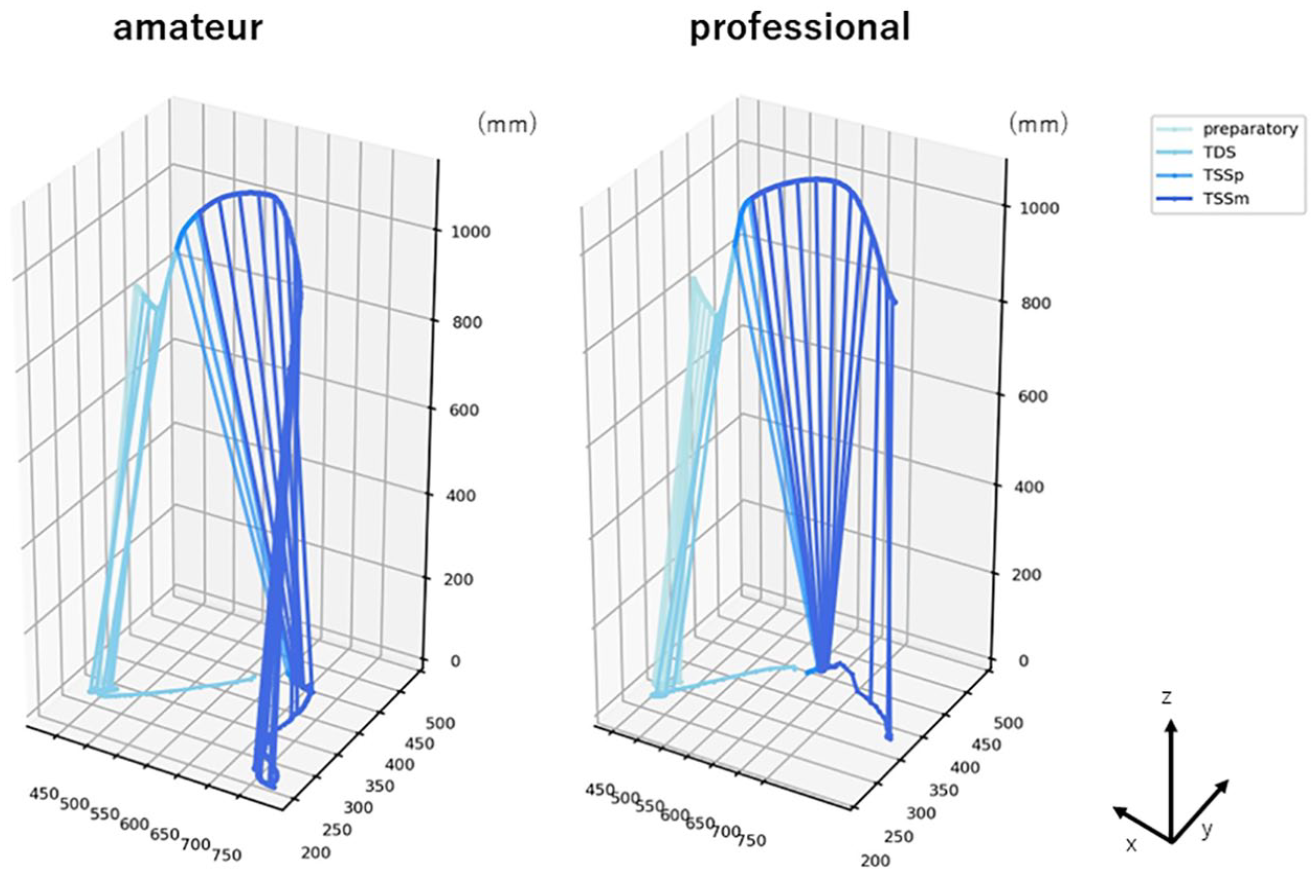
An example for 3D mapping of the COP-COM inclination angle during the pirouette en dehors analysis phase.
Statistical Analysis
Statistical analysis was performed using the average of 3 trials. All variables were analyzed using Python (ver. 3.10.4). To evaluate differences in the maximum anterior-posterior and medio-lateral inclination between the COP-COM line and the vertical axis, vertical GRF, and jump-up time during each phase between the 2 groups, unpaired t-tests or Mann–Whitney U tests were employed after assessing the normal distribution of the data through the Shapiro–Wilk test. The effect size was calculated using Cohen’s d by dividing the mean difference by the pooled standard deviation. Statistical significance was defined as P < .05.
Results
Table 2 summarizes the results for the maximum COP-COM inclination. There were no significant differences across phases TDS and TSSp. However, professional ballet dancers exhibited significantly lower maximum posterior inclinations (−2.05° ± 0.90°) than amateur dancers (−3.88° ± 1.67°) during TSSm (P < .05, d = 1.26). Figures 3 to 5 show the trend in the mean and SD of the COP-COM inclination angle for each 101 points in TDS, TSSp, and TSSm. In TDS and TSSp, each group showed the same trend in inclination angle. In TSSm, the professional dancers tended to show a smaller range of inclination angles, but standard deviations in both groups appeared to be large and varied.
Mean of Maximum and Minimum COP-COM Inclination in Each Phase, Mean ± SD (Degree).
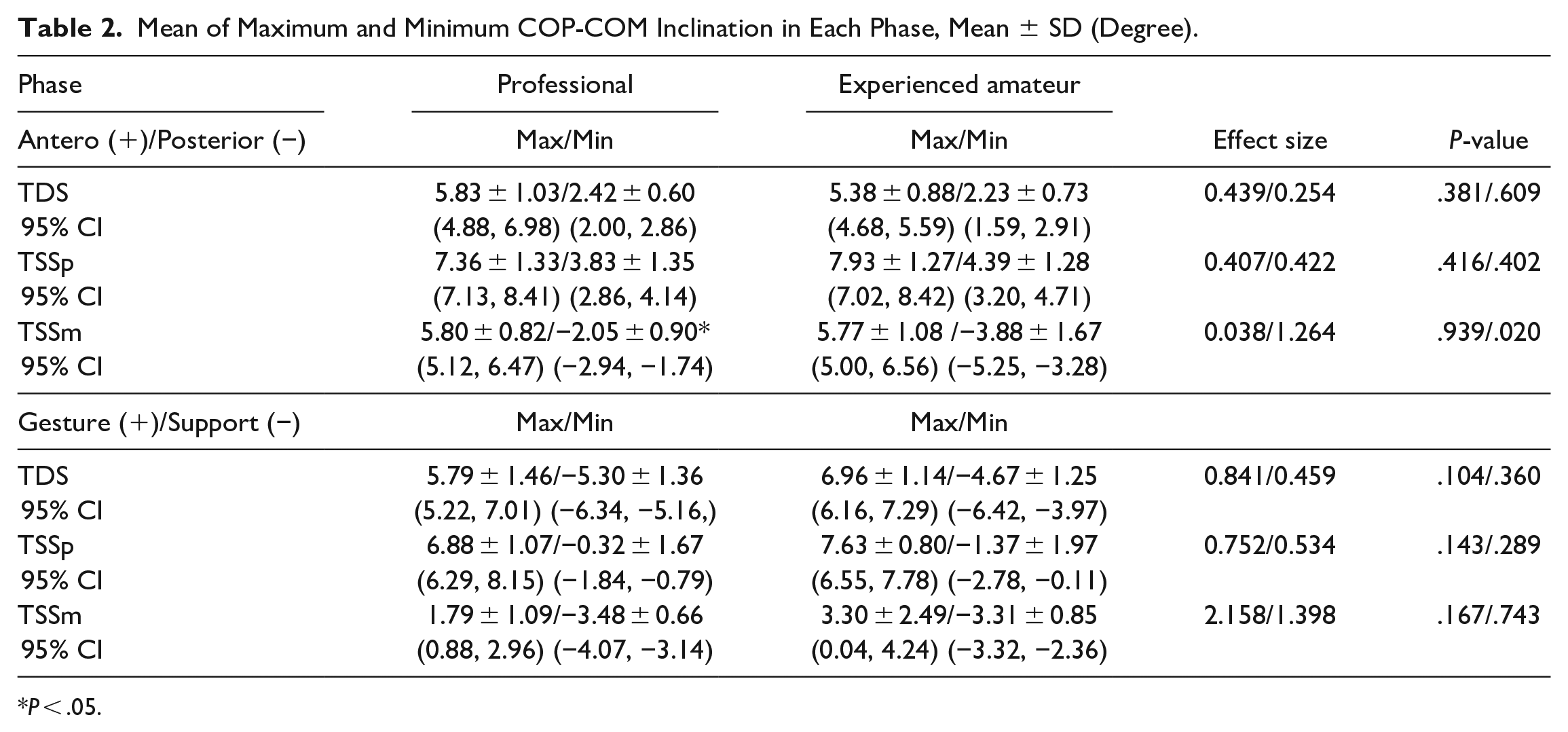
P < .05.
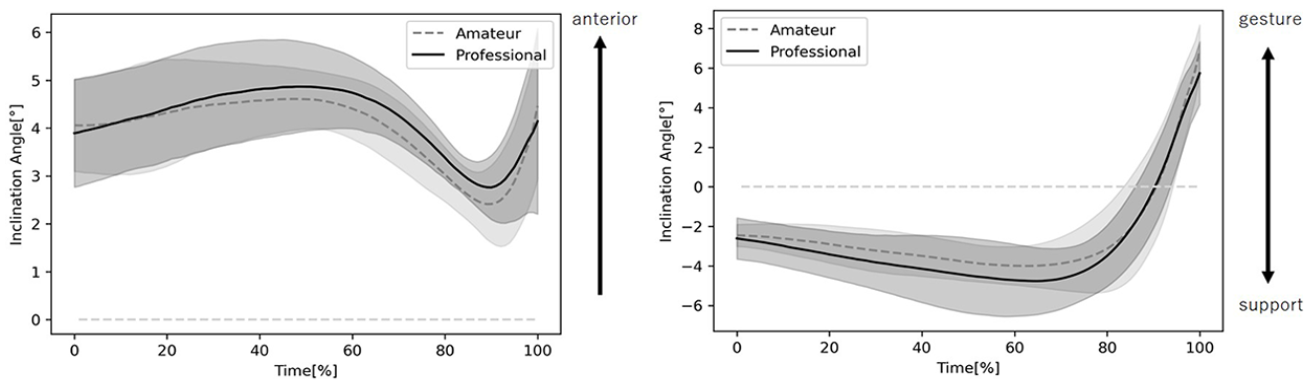
Changes with time of the mean COP-COM inclination angle during TDS.
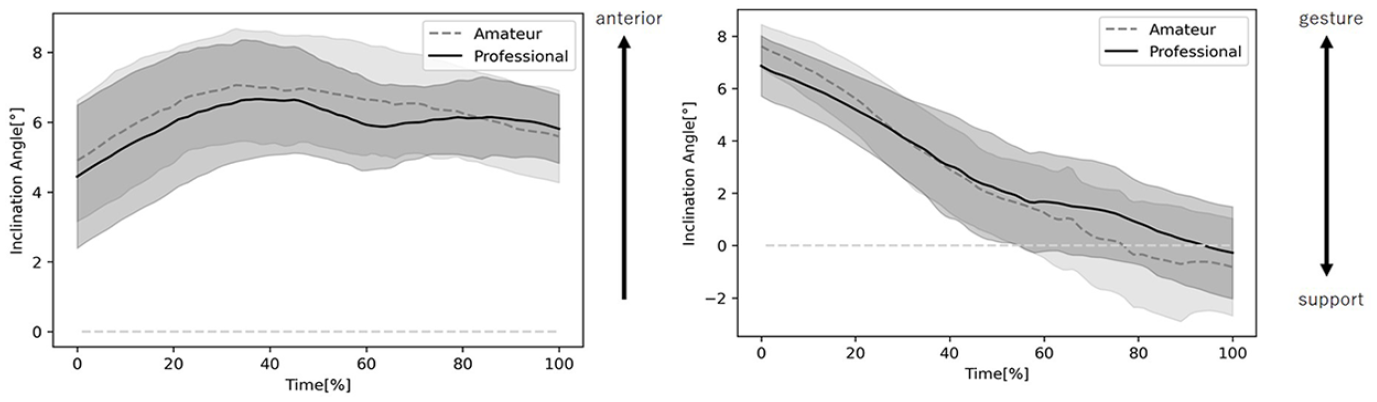
Changes with time of the mean COP-COM inclination angle during TSSp.
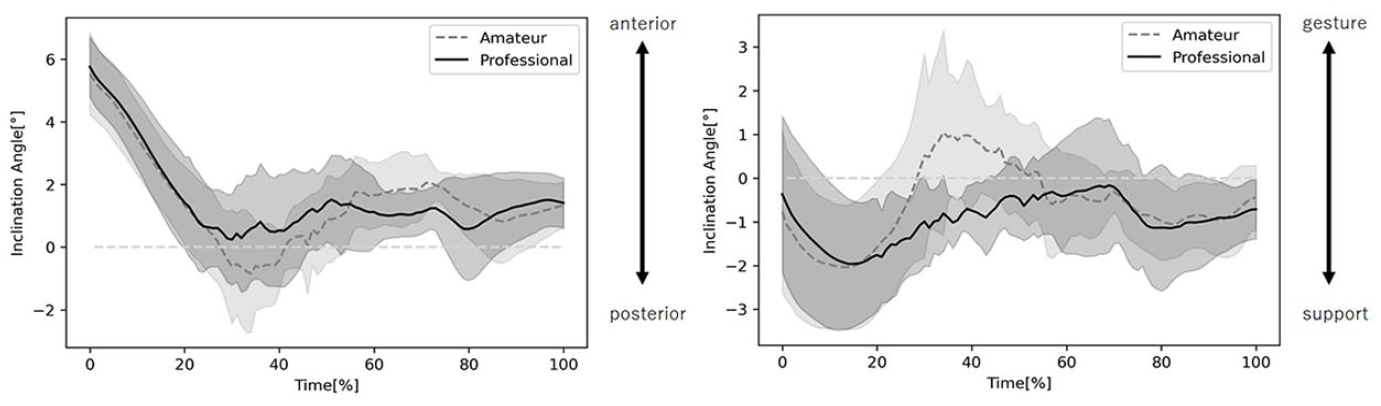
Changes with time of the mean COP-COM inclination angle during TSSm.
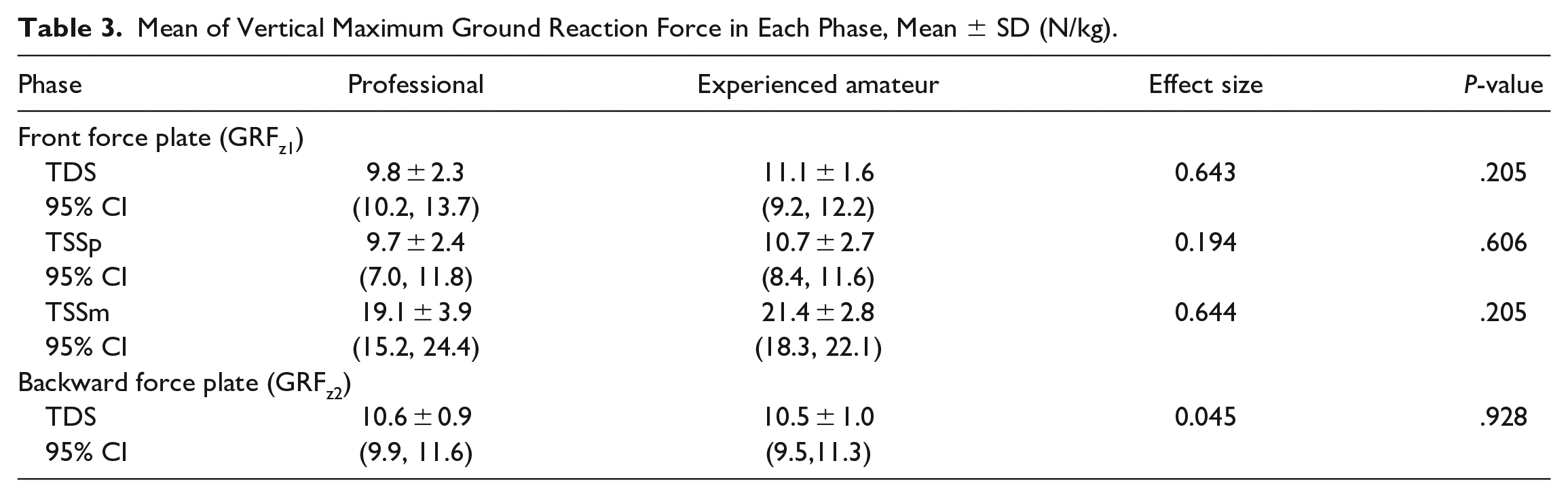
Table 3 indicates the result of maximum vertical GRF in TDS, TSSp, and TSSm. There were no significant differences across whole phases, and no difference in jump-up time (professional: 4.72 ± 5.51%, amateur: 9.17 ± 6.33%) during TSSp (P = .219, d = 1.41). While there was no jump-up time for any of the professional ballet dancers during TSSm, all except one dancer in the experienced amateur group performed with a jump and the jump-up time was 1.4 ± 1.3% on average. The jump-up time was significantly longer than that of professional dancers (P < .01, d=1.40).
Mean of Vertical Maximum Ground Reaction Force in Each Phase, Mean ± SD (N/kg).
Discussion
This study aimed to examine the balance strategies employed during pirouettes with pointe shoes by comparing trials of professional and experienced amateur ballet dancers. Our results showed that during the finishing phase of one turn (TSSm), professional ballet dancers maintained a lower maximum posterior COP-COM inclination without jumping, whereas amateur dancers exhibited a greater posterior inclination angle and returned from supporting one leg to supporting both legs with jumping. The result partially supported the hypothesis that professional dancers would have smaller COP-COM inclination only in TSSm, whereas there were no differences in maximum vertical GRF in whole phases.
Regarding TDS and TSSp, no significant differences were observed, despite our hypothesis that professional ballet dancers would demonstrate a smaller inclination angle. There are 2 possible reasons for this outcome. First, the previous study on novice dancers who exhibited a greater inclination angle during multiple pirouette revolutions was conducted with flat shoes,10,11 whereas our study was conducted with pointe shoes, which have a narrow base of support and require dancers to support their COM on a limited base of support. Considering this fact, there is a possibility that if dancers have a large COM-COP inclination, they cannot start the pirouette with pointe shoes. Second, the participants in our study were experienced amateur ballet dancers who had been wearing pointe shoes for over 10 years. As the task movement in this study was the basic movement of a single rotation, this suggested that the results would be similar if the dancers had a sufficient level of skill. Considering these facts, the differences in the rotational axes in TDS and TSSp of this study differ from those in previous studies. If we had selected amateur ballet dancers just beginning their pointe shoes training, the results might have been different. However, the difference between the 2 groups was reflected in the difference in practice time and the fact that professional ballet dancers had less posterior COP-COM inclination with less jump-up time in TSSm than amateur dancers due to having more experience dancing on stage.
For TSSm, professional dancers showed a smaller posterior inclination angle, which support previous study. In this study, dancers had to finish in the fifth position, which is a more challenging task than ending in the fourth position, as dancers have a narrower base of support in the fifth position. The process of maintaining balance is complex and relies on the integration of various sensory inputs, including vision, proprioception, and vestibular feedback. In this regard, the mechanisms involved in maintaining balance can be divided into three broad categories: reactive and predictive control, or a combination of both. 21 Reactive control is a feedback mechanism that responds to unexpected postural disturbances by adjusting the body’s position to restore balance; in contrast, predictive control anticipates and prepares for upcoming postural disturbances by adjusting the body’s position in advance. 9 Taking this into consideration, both groups demonstrated predictive adjustments during the initiation phase of turns. However, amateur dancers exhibited a lesser ability to maintain balance as far forward as professional ballet dancers during TSSm, and they needed to resort to a reactive response by jumping during the turn, which is one of the distinct mechanisms for standing balance. 22 In a static balance test, professional ballet dancers balanced significantly more in the anterolateral and less in the posteromedial part of their feet in comparison with amateur dancers and the controls. 23 While the previous study was a static balance test, the same tendency was observed in this study. From these facts, it can be inferred that the differences identified in the static balance may be reflected during pirouette with pointe shoes.
In the current study, no difference in maximum GRF was observed between the professional and experienced dancers. The lack of differences in the maximum GRF during rotational movements in our study can be attributed to several factors. First, it is possible that skill differences among high-level dancers may not be the determining factor for differences in vertical maximum GRF during a single pirouette with pointe shoes. It is possible that both groups were experienced enough and developed efficient movement patterns and body control, allowing them to optimize GRF production and transmission. Unlike a previous study, which reported different strategies to generate vertical GRF for turns, 16 these were not found in this study. Another possibility is that focusing on the vertical component of GRF alone may not fully capture the nuanced differences in the present study. Because the jump-up time during TSSm was different, it is highly possible that a combination of forces acting in different directions, including the anterior-posterior or medio-lateral directions, would reflect the differences. Considering these points, it is plausible that the distribution and coordination of forces in other directions are a more critical in distinguishing skill levels during rotational movements.
The reduced posterior COP-COM inclination angle in TSSm with no jumping was the only observed difference between professional and experienced amateur ballet dancers. Given that pirouette is frequently followed by other dance movements that demand postural stability, minimizing the tilt of the anteroposterior rotation axis and no-jumping during the ending phase would lead dancers elegantly to consecutive performance. This can be attributed to the technical skills of professional ballet dancers through extensive on-stage practice. The development of postural control strategies, similar to other motor skills, can be enhanced in efficiency and effectiveness through training and practice. 24 Therefore, the extensive training and dance practice required by professional ballet dancers likely contributes to their superior postural control skills compared with amateur dancers. This was supported by their reduced inclination angles and greater stability during complex movements, indicating a higher level of control over their COM.
Studying joint angles and multiple revolutions while wearing pointe shoes with larger number of dancers could help expand our understanding of the biomechanics of ballet movement and we would like to acknowledge that as a limitation of this study. In addition, it may have potential noise in the GRF and COP data because of the high low-pass filter cutoff frequency. By investigating joint angle change and which body position could have influenced the COM data during the pirouette, we can gain a more complete picture of the physical demands of ballet and how dancers can improve their turning technique. Further study is needed to investigate the joint angle during the turn to understand how professional ballet dancers maintain their COP-COM line straight during the ending phase. Such investigations could improve our understanding of the biomechanics of ballet movements and help dancers improve their techniques to turn more effectively.
The present findings suggest that, in contrast to amateur dancers, professional dancers exhibit superior control over their COM, maintaining a less posterior inclination, during the ending phase of pirouettes. The fact that the 2 groups were both highly trained and experienced in pointe shoes revealed that they may have performed single pirouette similarly, without as great a difference as in previous studies. These results offer new insights into the intricate movement patterns involved in executing pirouettes using pointe shoes.
Footnotes
Acknowledgements
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The grant is funded by Ministry of Science and Technology, Taiwan (MOST 106-2314-B-006 -013 -MY3).
Ethical Statements
Before participating in the study, each participant signed an informed consent form approved by Ochanomizu University (2019-9).