
Abstract
Autonomous Vehicles (AVs) are widely considered to be the future of surface transportation in the United States, but little is understood about how people will interact with these vehicles, what they will use them for, and how they will impact our roads. However, farmers have been interacting with some degree of AV technology, primarily auto-guidance, in the Midwestern U.S. for at least the last 10 years. We use in-depth qualitative interviews to understand farmers’ experiences with using highly automated technology in order to inform adoption and diffusion patterns of AVs. The findings include implications for on-road AVs for technology adoption, infrastructure, AV users, and public policy which each hold relevance for engineers, planners, and policy-makers seeking to be proactive in preparing for AVs.
Introduction
There is a great deal of speculation around the impacts and implications of autonomous vehicles on our roads. Proponents of the technology suggest that Autonomous Vehicles (AVs) will improve safety and efficiency on our roads, reduce transport-sector emissions, and improve delivery services (assuming the technology advances to the point at which it can be safely used in a broad range of circumstances). But any potential benefits of AVs depend on individual’s willingness to use the new technology. Diffusion of innovations theory is often applied to explain how technological innovations will spread across time; however, much existing diffusion of innovations research in the literature on autonomous vehicles is limited to examining the perceptions of those with little to no direct experience with the technology. We aim to shed new light on actual uptake of AV technology by learning from the experiences of those who have extensive experience with similar technology: farmers with years of experience using automated (and some partially-autonomous) technology.
Automated technologies have played an important part of American agriculture for the last 20 years by improving the precision and efficiency of farming equipment while also reducing operator strain and fatigue. This research aims to learn from the experiences of those in the agriculture industry with experience using automated and partially-autonomous farming equipment to better understand adoption decisions of autonomous vehicles. By focusing on a population with extensive knowledge and experience of automated and partially autonomous agriculture technology, this research offers new perspectives to better understanding potential AV adoption and diffusion. The insight gleaned from farmers with extensive use of automated and autonomous agricultural technology offers unique insight around AV technology and infrastructure development as well as highlights potential vulnerabilities of AV usage on rural roadways.
This is a qualitative study, using thick descriptions, derived from a series of in-depth qualitative interviews with farmers and others in the Midwestern agriculture community to answer two guiding research questions: (1) How have those in the Midwestern agriculture community experienced automated farm equipment? and (2) How does usage with automated farm equipment impact views of fully autonomous technologies? Our findings span four themes: technology adoption, misaligned expectations, challenges with the technology, and perceptions of the technology. From these themes, we offer relevant implications for autonomous vehicle technology development, user experience, infrastructure requirements or expectations, and public policy considerations.
Literature Review
Significant advancements in autonomous transportation technology in recent years increase the prospect of a driverless future, forcing planners and policy-makers to grapple with an as-yet hypothetical future. Autonomous transportation technology has gained wide interest, for a host of reasons, including the potential to improve roadway safety and efficiency, mitigate roadway congestion, improve fuel economy, reduce long-term roadway infrastructure maintenance and management costs, and enhance service delivery (Chen et al., 2019; Ilgin Guler et al., 2014; Stanek et al., 2018). In the United States, there are more than 35,000 fatalities and 2 million injuries as a result of traffic collisions annually (National Highway Traffic Safety Administration, 2019). Autonomous vehicles (AVs) are widely presented in the literature as a means to potentially address traffic collisions caused by human errors and improve traffic safety (Ye & Yamamoto, 2019). Additionally, AVs have been touted for their ability to expand transportation access and mobility for people with disabilities and those unable to drive, such as children and aging adults (Bennett et al., 2019; Lee & Mirman, 2018; Pettigrew et al., 2019).
The potential benefits of AVs depend on the extent to which people are willing to adopt the new technology. Diffusion of innovations theory is applied widely to predict and explain AV adoption trends. The theory is used to explain how a particular technological innovation might spread across a population over time (Rogers, 2003). Rogers (2003) categorizes the population into five adoption categories: a few very early adopters (innovators) followed by a gradual increase (early adopters, then early majority). According to the model, the rate of adoption will slow during the late majority phase and then finally plateau during the laggards stage. Collectively, when displayed graphically, diffusion of innovations theory forms an “s-curve” and is useful to predict adoption patterns. Rogers emphasizes the importance of reaching critical mass of an innovation adoption in order to ensure its success.
According to diffusion of innovations theory, each individual actor follows a sequential decision-making process consisting of five stages: knowledge, persuasion, decision, implementation, and confirmation. The process recognizes that as a person becomes more knowledgeable about the innovation being considered, they will make a decision whether to adopt based on a set of perceived advantages or disadvantages. If the innovation is adopted, then it goes through the implementation phase, and if determined useful, then the confirmation stage. A limitation of existing diffusion of innovations theory research is that many existing studies base their conclusions on scenarios with decision-makers in the early stages of the model rather than with decision-makers who have experience using the technology.
Our research addresses this gap in diffusion theory by seeking to learn from a unique population that has direct experience with all stages of the decision-making process. In the literature on AVs, existing studies primarily focus on the earlier stages of the decision-making process by exploring user perceptions. These studies largely require study participants to speculate what actions they would take in hypothetical scenarios with technology they have no experience using (see, for example, Hulse et al., 2018 and Sheela & Mannering, 2020). Studies focused on user perceptions of AVs that make inferences about early adopters further tend to be limited by their focus on urban populations, who tend to be less reliant on the automobile, and more familiar with related transportation innovations, such as bikesharing, carsharing, and e-scooters (for example, Acheampong et al., 2019; Bansal, Kockelman, & Singh, 2016 and Lavieri et al., 2017). In contrast, our study seeks to learn from the experiences of a population living in auto-dependent areas, with extensive experience with automated and partially-autonomous farm equipment, offering new insights into planning for the future of AV adoption and diffusion.
While drivers are becoming increasingly accustomed to driver-assist technologies (e.g., lane-assistance, back-up cameras, and blind-spot detectors), their impacts have been modest. In contrast, over the last 20 years automated farm equipment has revolutionized the American agriculture industry. Early methods of automated agriculture, often called precision agriculture, use GPS based systems to distribute agriculture products in the field more efficiently than conventional methods. Precision agriculture has evolved to encompass a wide range of activities, including, variable rate applications, precision soil sampling, guidance based and auto-steer, and yield monitoring. Auto-steering technology enables farmers to travel in a pre-determined path, allowing the equipment operator to focus on functions other than driving. Additionally, autonomous tractors are now available which can perform most agricultural functions of a traditional tractor (such as plowing, planning, fertilizing, and harvesting) with no human operator present. More widely used than fully-autonomous tractors, partially-autonomous tractors can perform the functions autonomously, but require a human to be nearby and ready to intervene if needed. Because autonomous tractors and the auto-steering technology used in agriculture equipment is similar to the technology being developed for autonomous vehicles, farmers with extensive experience with the technology are an important yet often overlooked study population. By understanding the first-hand experience of automated and autonomous agriculture technology users, we can better understand the implications of AVs for planning and policy.
Methodology
We explore user experiences with automated farm equipment using a qualitative methodology designed to understand autonomous transportation technology adoption. In so doing, this study offers a novel addition to the literature on AVs. Much of the existing literature on adoption of AVs is strictly quantitative in nature (see, for example, El Zarwi et al., 2017 and Nieuwenhuijsen et al., 2018). Much of the existing AV literature relies on surveys or travel demand modeling to forecast adoption. A previous study examining farmer perceptions of automated agriculture technology is limited to quantitative methods (best-worst scaling choice experiment) (Thompson et al., 2019). Rich qualitative data is well-positioned to add new insight into understanding how experiences with automated equipment might inform perceptions of AVs and adoption patterns. Unlike quantitative research, qualitative research is descriptive; it seeks to explain social phenomena and the contexts in which they occur by using thick descriptions (Chambliss & Schutt, 2018; Neuman, 2013; Snape & Spencer, 2003). Since this study seeks to learn from the experiences of those who have used automated agriculture technology, such questions necessitate a systematic and analytic approach offered by qualitative inquiry. This research first answers the primary research question: How have those in the Midwestern agriculture community experienced automated farm equipment?
Additionally, this research answers the following secondary research question: How does usage with automated farm equipment impact views of fully autonomous technologies?
Since this research is designed to gain a thorough understanding of experience, perceptions, and views, we utilize a series of semi-structured, in-depth interviews with farmers and others working for companies who are developing and implementing new technology in the Midwest agricultural community. The robust qualitative procedures for data collection and analysis used in this study are depicted in Figure 1 and described in greater detail below. The Qualitative Interview Research Process.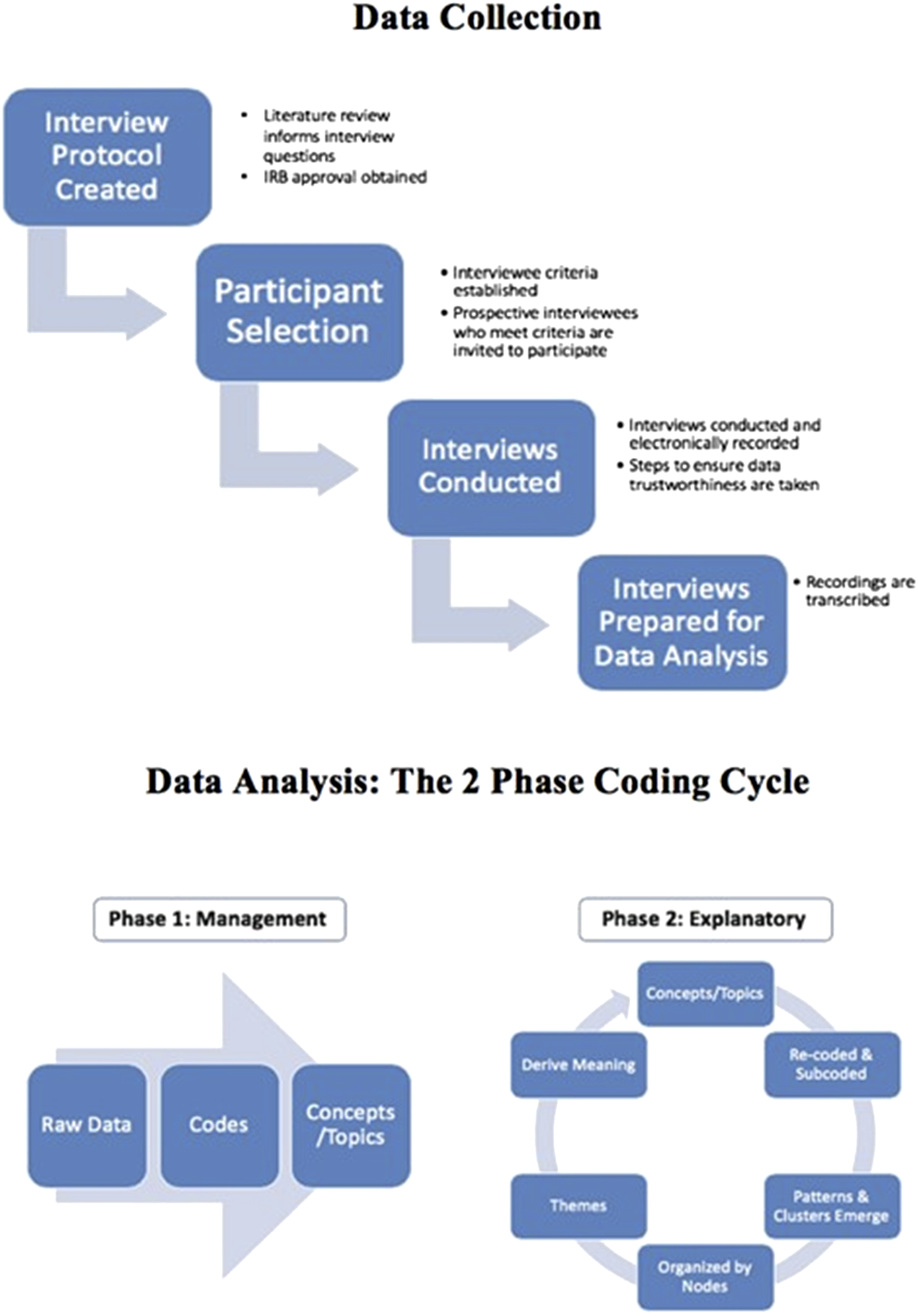
Data Collection
The Midwest United States has long played an important part in American agriculture, growing crops such as corn, soybeans, wheat, hay, beans, and potatoes. Midwest farmers have extensive experience with automated farm equipment, making them ideal population of study for this research. Farmers are also an important population to study with regard to AVs as they live in automobile-dependent, primarily rural areas, which are populations often overlooked in AV research. Farmers also offer a unique perspective as they are increasingly aging and facing increased healthcare challenges in accessing healthcare which may also have implications on their ability to safely drive themselves in the near future.
This study utilized a purposeful sampling method for selecting participants (Maxwell, 2013). Prospective interviewees were identified based on their prior experience using automated farm equipment and/or particular knowledge of automated agricultural technologies. Of the 11 interviewees, the primary job of eight participants was grower/farmer. In selecting participants, an attempt was made to select growers working in a diversity of geographic areas; two of the growers operate fields within close proximity to urbanized areas and the remaining six operate in fields located in rural areas. The other three participants work for different companies in the Midwest developing and/or selling automated and autonomous farm equipment. These participants held the following titles: Systems Engineer; Technology Developer; and Product Training Specialist.
Prospective interviewees were initially contacted by email where they were introduced to the study, made aware of participant rights, and invited to participate in an interview at their convenience. Once interviewees agreed to participate in the study, a telephone interview was scheduled. All participating interviewees were guaranteed confidentiality.
The interviews used in this study were semi-structured in nature. Semi-structured interviews or “conversations with a purpose” (Berg, 2004; Kahn & Cannell, 1957) reveal new insight on a topic by forming a partnership between interviewee and interviewer (Luton, 2010). The semi-structured interviews rely on a series of predeveloped questions and topics while allowing flexibility to probe further around topics that arise during the interview (Berg, 2004).
To improve validity of the findings, the telephone interviews were recorded, transcribed, and hermeneutically analyzed (Burr, 2006; Maxwell, 2013) using MAXQDA software. The interviews ranged in length from 17 to 45 minutes with an average of 29 minutes per interview. The interview questions were intentionally designed to be open-ended and gain a better understanding of experiences with automated agriculture equipment. The questions centered around adopting automated technologies, challenges in using automated equipment, perceptions of automated technology, attitudes toward fully autonomous technologies, using automated and autonomous equipment on public roads, and opportunities for autonomous vehicles impacting the agriculture industry.
Data Analysis
Interview transcripts were thoroughly analyzed using the qualitative coding software MAXQDA. The coding occurred in two stages. The first stage sought to organize the data around concepts pertaining to the research questions and the second stage sought to establish trends and themes across the data so that meaning could be understood (Saldana, 2015). The following primary codes were derived from the data: adoption, impact of automated farm equipment, impact of fully autonomous farm equipment, perceptions of automated equipment, perceptions of autonomous vehicles, experience informs autonomous vehicle perception, trust in autonomous vehicles, public roads, farm equipment-vehicle interaction on roads, user interface, and challenges with automated technology. Using a systematic cyclical coding process enables meaning of the data to be generated and understood (Saldana, 2015). Data triangulation was achieved by both researchers checking the data for consistency and drawing on multiple sources of data during the data analysis phase. The researchers used techniques described by Maxwell (2013) to check for “validity threats” during the data analysis process that could lead to alternate explanations of the findings.
In order to be transparent and promote authenticity, the presentation of the findings relies on thick descriptions and direct quotations from interviewees (Brower et al., 2000).
Findings
Overview of the Findings.
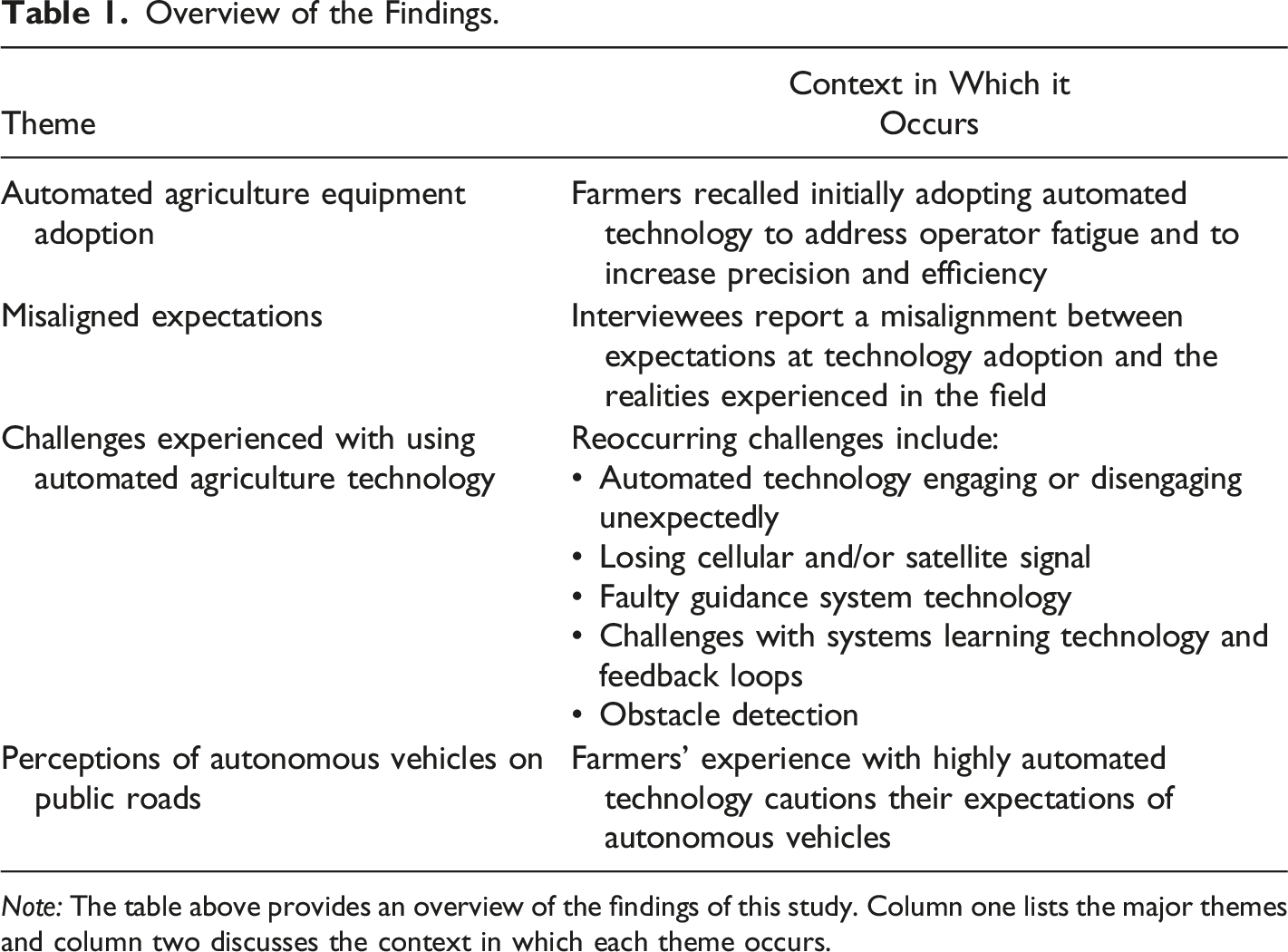
Note: The table above provides an overview of the findings of this study. Column one lists the major themes and column two discusses the context in which each theme occurs.
Farmers’ Experience With Automated Technology
Reasons for Adoption
Interviewees who work as agriculture producers were asked to recall why they initially started using automated agriculture equipment. Each of the growers in this study mentioned mitigating driver fatigue as a primary motivation for adopting automated technologies. As one interviewee recalled, “It was a time saver and it was a stress reliever. It made things a little easier through the day.” Another interviewee mentioned that they sought to minimize operator fatigue to increase precision and efficiency: You can run longer hours with less fatigue. Operator fatigue used to be a bigger issue than it is now. I think you can pay more attention to the field operation that you are actually doing. Like if you are planting—you used to concentrate on driving straight…and concentrating on the front of your tractor and keeping it straight down the row, and now you can monitor what is going on behind you better; make sure the planter is doing what it is supposed to do.
Participants repeatedly mentioned that prior to early automated agriculture equipment, farmers had to estimate many variables such as amount of product to dispense based on factors including speed and width of the agriculture equipment. Adopting automated systems increased the precision of this process: “it took some of the guess work out of it and made it more precise.”
Interviewees also mentioned that automated technologies initially appealed to them when they sought to make use of new farming techniques. As one interviewee recalled, “I was just looking to do some variable rate things in the field.”
Several farmers mentioned that widespread labor shortages in the agriculture industry led them to seek out new technologies that would improve the efficiency of their operations. This sentiment was shared by the three interviewees working in agriculture technology development who all mentioned that their respective companies’ efforts in developing new technologies is directly in response to the agriculture industry’s labor shortage and farmers’ demands for being able to—as one interviewee stated--“do more with less”.
Misaligned Expectations
One important theme that emerged in the findings of this research is that farmers report a misalignment between expected performance at adoption and realities in the field post-adoption. One interviewee mentioned the autosteering technology is not without unforeseen limitations: I had high expectations of it being ultra precise…it does well but it’s probably not quite how like I imagined. And I guess disappointment might be once in a while it will lose signal or sometimes it struggles to find its way. If I have two lines in the field, sometimes it doesn’t know which line to lock onto. And it can be a bit of a thrill ride if you’re sitting there and suddenly it decides to go a different direction.
Similarly, another interviewee reported expecting certain results when adopting the technology that were not actualized once using the new systems: You need to learn the limits of the equipment in order to be able to use it. Because a lot of times you’ll go ‘oh yeah we just dropped 25 grand on this thing, it ought to fix me pancakes and coffee at the same time. But it’s like ‘no’… My first perceptions were ‘oh this is going to be great; we’ll be able to turn it on and let it go’ and they are becoming more matched to the capabilities.
Many interviewees described a misalignment between expectation and reality, that is, the technology did not live up to promised benefits. According to the interviewees, the misalignment is often a result of the challenges they experience in using the technology as elaborated upon in the following section. However, not all misaligned expectations reported by interviewees were negative. Several interviewees also reported that after adopting and using new agriculture technologies, they experienced positive unforeseen benefits.
As one farmer stated, “I think there are more benefits to it that I didn’t see when I first was thinking about getting and investing in this technology. I wasn’t sure if it would ever be worth the cost. But I think once you have it, it’s more beneficial than you realize it would be.” Interviewees who reported unexpected benefits mentioned that there were nuances in the technology that enabled them to be more precise and efficient with farming in ways they did not expect.
Challenges Experienced With Automated Technology
One of the primary themes in the data is that interviewees report common challenges with using the automated technology. The challenges they experience lead them to concerns with fully trusting more advanced technologies. The five primary challenges reoccurring in the data are discussed below.
Automated Technology Engaging or Disengaging Unexpectedly
Interviewees report automated systems unexpectedly engaging or disengaging while in operation. Recalling their experience with automated steering technology, one grower said, “I have had the automation shut off unexpectedly…and the tractor veers off course.” Another interviewee described similar occurrences: I have had it (Autosteer) where it switched off rather suddenly. My reaction after a few words that should not be said in public are usually an emergency stop; you slam on the clutch and hit the brakes and then you try to figure out what happened. You know we’re never going very quick; 4–5 miles per hour and suddenly it disengages and all of a sudden you’re kind of just drifting off to one side or the other.
Losing Cellular and/or Satellite Signal
A majority of interviewees reported losing cellular and/or satellite signal, often in rural areas, operating near hills, or in times of inclimate weather. According to interviewees, when this occurs, operations cease until resolved. In some cases, losing signal has caused extended delays. As this interviewee described it, “Cellular works for the most part unless you get into some low areas or behind hills. Satellite works for the most part except if the satellite goes down, which we have had happen before…And nothing runs if satellite goes down.”
Because automated technology has shifted how farmers conduct field operations and is fully dependent on the automation working, losing signal can result in significant challenges: There’s always those frustrations—the days where you lose your satellite signal and you just have to stop because we’ve removed the planting markers that we used to use to make the mark on the ground to follow. Now, we’re completely dependent on the autosteer so when some things go down, it’s frustrating.
Another interviewee further described this challenge and the potentially detrimental effects it can have on their farming operations: We operate in a pretty remote area and losing satellite is a somewhat frequent occurrence. And when it happens, everything has to come to a halt, because we can’t keep going on without it. And that setback can be costly to us, because in farming everything is about timing and even if the setback is just one day, that can make a big difference in our world.
Faulty Guidance System Technology
A common challenge reported by interviewees were errors in the automated guidance system that lead operators in an undesired direction when operating machinery. In describing their experience using automated equipment, one interviewee stated that guidance systems which rely on a “GPS system alone to determine forward or reverse…can sometimes get confused as to which direction you are going. So you can turn around at the end of the field, think you’re going in reverse and then you have hit the button to acquire the line and then it turns the exact opposite direction that it should be because it thinks it is going backwards when it is actually going forwards.” Another grower described a similar situation, “It will maybe overshoot the line that you are trying to acquire or it might acquire a line that you weren’t expecting it to. You thought it was going to steer in one position but all of a sudden it steers the other way. The machine itself can also get confused as to which direction it’s traveling.”
Issues With Systems Learning Technology and Feedback Loops
According to interviewees, an inability to receive feedback limits the sophistication and accuracy of the technology. For example, one grower stated, “The automated technology is getting better but they don’t yet have the ability to learn and they are not a whole lot different than a high school kid in some cases…there often isn’t a feedback loop for some of the things that need to be done.” In other words, the existing technology lacks ability to make changes or adjustments in performance based on prior experience with the field. Farmers often describe this as a time consuming and a frustrating limitation of the technology as they are forced to repeatedly adjust or correct the same issues.
This becomes more complicated when common actions of farmers are excluded from the technology’s system programing. Referring to their experience working with farmers in Nebraska, the Product Training Specialist stated: Here in Nebraska, you have long enough rows in your fields that the combine can’t make it all of the way through and the grain cart has to move over…and pull up next to the combine anyway…It’s not reasonable for it to back up out of the field and unload and go forward again. So the grain cart just has to move over and drive over this corn that hasn’t been harvested. Well, the SmartAg system was smart enough to know it wasn’t supposed to drive over unharvested corn and so it wouldn’t do it. There are a lot of things that farmers do that are not necessarily standard operating procedures. I’m not saying that it is unsafe, but something like that isn’t something that you would program into a system but it is something that every farmer with long rows does at some point or another.”
As the interviewee above described, farmers often experience limitations of using the technology as it fails to account for how the technology is used in real-world situations. The inability for the technology to adapt to the variety of situations that arise in practice is a concerning limitation and the implications of such limitations will be discussed further in the discussion section below.
Obstacle Detection
The inability for existing automated technologies to detect and respond to certain obstacles is a primary concern for many interviewees. For example, recalling their own experience in the field, one grower mentioned, “There’s always issues in the field—you could come across a washout or a hole that you need to avoid. It may not show up on a map, or it wasn’t there last year so the vehicle doesn’t know it’s there.” The software engineer working for an automated agriculture equipment company described obstacle detection as one of the greatest limitations of automated and autonomous agriculture technology: “Where the system breaks down is the perception and identification of obstacles.”
As each of the five areas described above encapsulates, the challenges interviewees experience in using automated technology result in serious, and sometimes consequential, implications for farming. The systems engineer for an agriculture technology company discussed the challenges with designing technology that accurately reflects the intricacies of farmers’ actions: There’s a lot of things that you don’t really think about that the operator or someone in the cab just monitors and occasionally adapts to. If something was controlling the machine it would have no idea that something was going wrong even through all of the sensors and everything reads okay.
For farmers, the challenges they experience in the field using automated technology often leads to trust issues with the prospect of using more fully advanced agriculture technologies. For example, one interviewee mentioned that their previous instances of the autosteer technology disengaging unexpectedly has “led to part of [their] lack of trust”. When asked whether they would trust new technologies in agriculture, one interviewee replied “I would still be hesitant. Maybe I’m just kind of a control freak, but I like to still be in control of the vehicle if I need to be and I like to see what’s going on in the field.” For this interviewee, their experience with occasionally malfunctioning technology cautions their trust of fully autonomous agriculture equipment. Interviewees experiences with automated agriculture equipment and the challenges they have endured also greatly informs their perceptions of autonomous technology and their concerns about the ability for autonomous vehicles to safely operate on the diversity of conditions on public roads.
Farmers’ Perceptions of Autonomous Technology
Interviewees were asked a series of questions surrounding their attitudes toward adopting new technologies in agriculture. Interviewees expressed interest, but also cautioned that based on their experience with existing technology, premature adoption of new technologies could be detrimental. As one grower posited: We understand that it is a great technology and takes a lot of stress off us as operators, but by the same token, it’s not quite ready for prime time. There are limitations and if you don’t understand those limitations, you’re going to get in a lot of trouble really quickly.
Public Roads
Farmers are particularly attuned to navigating varying road conditions, and a majority of interviewees expressed concern with the ability for fully autonomous vehicles to perform on them. Based on their experience with agriculture technology malfunctioning, one interviewee imagined the challenges of an autonomous vehicle enduring similar challenges: What I have found out with technology is that it is not fail safe and it does have its limitations. And when it does break, it’s usually something that the lay person can’t fix. It takes a technician. And that’s where I would have some concerns [with AVs] if someone gets stranded on the side of the road because their autonomous vehicle won’t drive or if their autonomous vehicle errs and drives off the road, how would they correct it?
Rural roads in particular are prone to variable conditions and less maintained roads. One farmer who operates fields in rural areas questioned, Especially in rural areas, how will autonomous cars be able to detect the edge of the road? How would they be able to pass farm equipment? What would an autonomous vehicle do around manually driven farm machinery? I guess if I think of myself and an manually driven tractor, it might be less predictable what an autonomous car would do around me than what a car would do.
Another interviewee expressed similar concerns: I wouldn’t be confident that whatever software that is in the autonomous car would [safely navigate rural areas]…The main thing I think about when I think about autonomous cars are: ‘How will it handle gravel roads?’ because you don’t use the whole gravel road because a lot of times the shoulder is really soft and you could get sucked into the ditch. So it might look like the whole road is available for you to drive on but you can’t do that. And on really muddy roads, how does the autonomous vehicle know what speed it’s supposed to drive at? Because there are a lot of times where the posted speed is not the speed that you should be driving at because it’s not safe. And that goes for icy roads and muddy roads. And then obstacle avoidance. There are a lot of times where things end up in the middle of the road.
Lastly, interviewees described the importance of symbolic interactions and gestures to communicate between the agriculture equipment operator and motorists to safely navigate encounters on public roads. As one example, farmers mentioned that when they are operating agriculture machinery on public roads, they often position themselves toward the left of the driving lane—rather than the center—to signal to motorists when it is unsafe to pass. Interviewees repeatedly expressed concern that autonomous vehicles will not be able to engage in such situations which could lead to uncertainty and/or potentially unsafe encounters.
Discussion
This research demonstrates that the agriculture industry’s extensive experience with automated equipment offers novel insights for better understanding AV adoption and diffusion in the United States. We find that farmers describe automated agriculture technologies as a primarily positive asset to their work despite the various challenges they experience in using the technology. However, farmers also recognize that the relatively controlled environment of an agriculture field differs from the complexity of a public roadway. This recognition and the challenges they have experienced in the controlled environment, leads them to think critically about the capabilities of AVs. As one interviewee remarked: I’ve seen the good and the bad of what advanced technologies can do. Automated equipment has made farming easier and better, but things definitely go wrong. So as for autonomous vehicles, we hear a lot about the good things autonomous vehicles can do, but we need to be talking more about what could go wrong.
Farmers in this study repeatedly expressed significant concerns over the capabilities of autonomous vehicles, particularly their performance on rural roads. This finding challenges existing literature on technology adoption and diffusion, which presumes that prior experience with technology leads to more favorable perceptions of future technologies. This important finding suggests that driver experience with partially autonomous vehicles cannot be assumed to lead to eager adoption of fully autonomous vehicles. In fact, it may be that even if the majority of experiences with AV technology is positive, a single negative experience may have an outsize impact on their willingness to adopt the technology. Farmers in this study were asked if they would adopt fully autonomous agriculture equipment, and a large majority of interviewees (9) were hesitant to say they would adopt fully autonomous agriculture equipment.
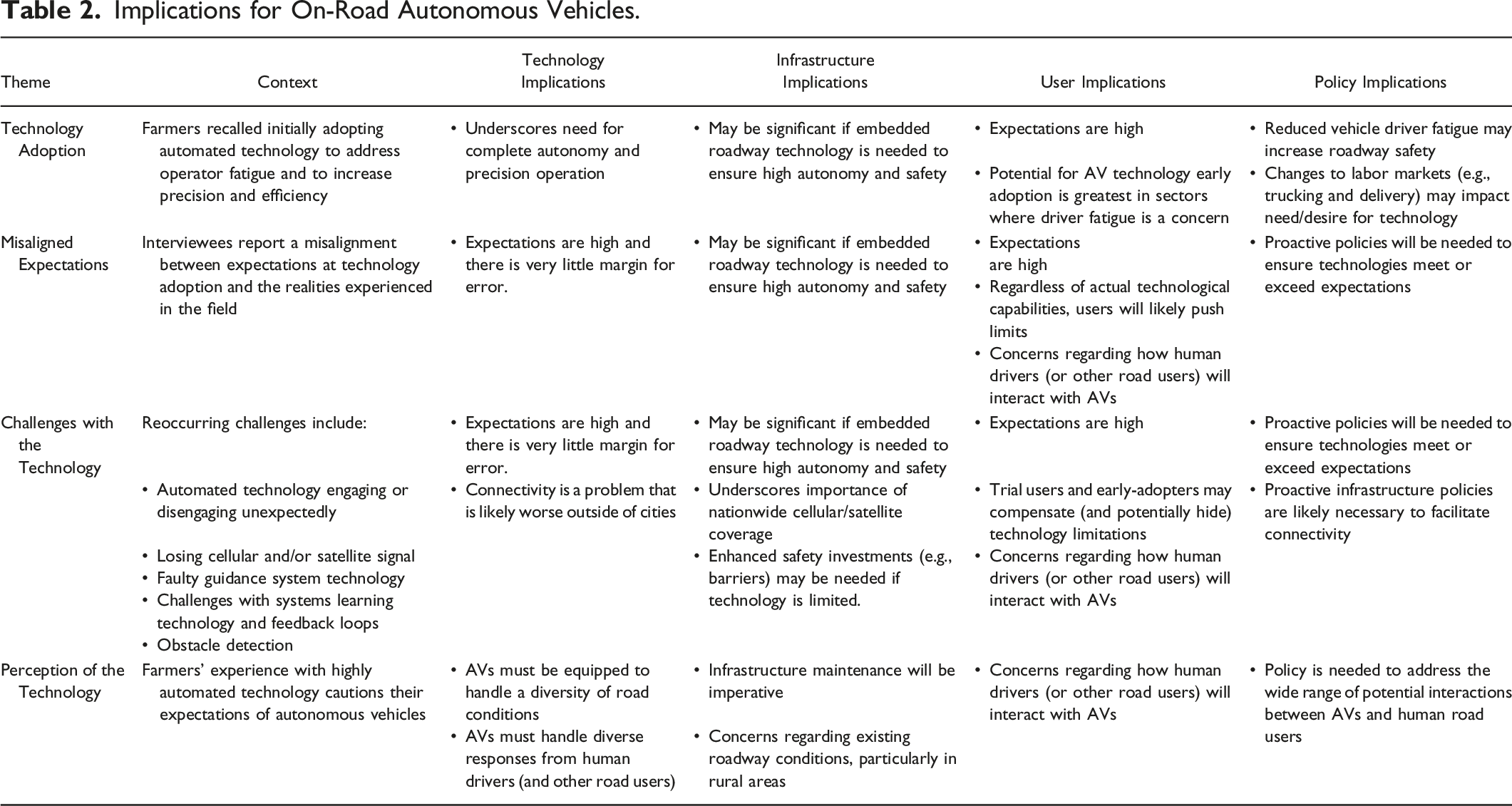
Implications for On-Road Autonomous Vehicles.
Technology Implications
This study found that farmers recalled initially adopting automated technology to increase precision and efficiency in agriculture operations. However, upon using the technology, farmers reported a wide range of technological challenges. For AV technology development, this reinforces the importance of thorough testing in a diversity of real-world scenarios that achieves complete precision before the technology becomes commercially available. The challenges discussed in this research unique to rural areas emphasizes the differing road conditions and that AV technology must be designed to ensure success across spatial and geographic differences. Lastly, AV technology must recognize and take into account that motorists and other road users often use symbolic interactions and gestures to safely navigate public roadways.
Infrastructure Implications
The challenges farmers reported in this research underscores the importance of nationwide cellular and satellite coverage. In this study, farmers repeatedly discussed the limitations of rural roadways, including lack of signage and road markings, narrow and/or gravel roads, and poor maintenance. If we assume that AVs will require consistent roadway conditions to operate safely then transportation agencies should be particularly aware of the potential increased costs. For example, even a simple requirement like consistent paving material or lane and shoulder markings to ensure AVs can sense the roadway could be extremely costly (and likely cost-prohibitive, particularly in rural areas). Furthermore, it is unlikely that all traffic accidents could be avoided, even assuming a fully-autonomous fleet, raising the question of whether existing highway safety measures will be adequate (particularly if AVs are likely to be traveling at higher speeds).
User Implications
One of the primary reasons participants in this study reported initially adopting automated agriculture technologies was to address operator fatigue. All participants in this study agreed that they saw improvements to operator fatigue upon adoption and that it continues as one of the primary benefits of automated agriculture technologies for their work. This suggests that early adopters of AV technology have great potential in sectors where driver fatigue is a concern.
This study also revealed that farmers often had misaligned expectations of the automated technologies; that is, their expectations for the technology at adoption differed from what they later experienced in the field. This suggests that one should not over-emphasize the speculative perceptions of those with no experience using the technology. Additionally, decision-makers should be aware that AV trial users and early-adopters may not fully experience technology limitations; there is also potential for such groups to compensate or camouflage limitations.
Public Policy Implications
The prospect of AVs reducing driver fatigue holds potential for increasing roadway safety. Findings from this study emphasize the importance for proactive policies that ensure technologies meet (or exceed) expectations. Other proactive policies facilitating infrastructure connectivity and addressing the wide range of potential interactions between AVs and human drivers will also be needed.
Conclusion
By focusing on the experiences of those who have participated in the decision-making calculus of new automated technologies--rather than focusing exclusively on early speculative perceptions with inexperienced populations--this study offers a more holistic scope to understanding AV adoption decisions. As Sheela and Mannering (2020) address, one limitation of AV research currently is the inability to examine how autonomous vehicle user preferences might change over time, and particularly post-adoption of the technology. This study found that farmers’ perspectives of automated and partially-autonomous technology did negatively change at times post-adoption. Further, because participants in this study had tangible experience with automated and partially-autonomous technology, participants voiced specific technology and infrastructure related concerns around autonomous vehicles that are not captured by studies focusing on speculative perceptions (which primarily focus on user implications). Transportation policymakers should be aware of the potential for user perspectives on autonomous transportation technology to change pre- and post-adoption based on users’ experiences interacting with and relying on the technology. Additional future research would benefit from more thoroughly examining differences in user perceptions around AVs pre- and post-adoption.
Automated agriculture technology has played an important part in American agriculture for the last two decades. Learning from the experiences of those in the agriculture industry also produced relevant findings with important technology, infrastructure, user, and policy implications for on-road autonomous vehicles. Although this study population was limited to the Midwestern United States, the findings of this research offer insight to better understand potential AV adoption. Additionally, this research made experience with automated farming technology a criterion for inclusion in the study, and therefore, does not include any potential farmers who have rejected all forms of automated machinery. However, this group is likely very small given the pervasiveness of automated technology use in American agriculture over the last two decades. Future research may benefit from further exploring the experiences of farmers who initially rejected automated technologies, but later chose to adopt. Findings from this research illuminate concerns over the ability for AVs to successfully perform on rural and/or gravel roads. Future research is warranted to examine the financial implications of increased roadway infrastructure and maintenance for transportation agencies.
Farmers’ experience with automated farm equipment offers a cautionary tale for the development of AVs. Unforeseen circumstances are likely to arise as AVs become more widespread and encounter a growing diversity of scenarios. The findings and implications of this study offer salient relevance for AV technology developers, users, and policy decision-makers as they work toward an autonomous future. This research reiterates that the stakes are high and there is little room for error; therefore, technology developers must ensure precision in AV performance. Users should recognize that expectations for AVs at adoption will likely differ from their experience in reality. For policymakers, this research echoes the need to create anticipatory and adaptable policies for advanced transportation technologies. By thinking carefully and critically about AVs, the prospect of a safe fully autonomous fleet inches closer to fruition.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Nebraska Department of Transportation.