
Abstract
We formulate an optimization of a bicycle ascent time under the constraints of the average, maximum, and minimum powers. In contrast to the first part of this study, we do not restrict the departure to flying starts with an initial speed determined by the model and its optimization. We allow for various initial speeds, from a standstill to a launched start. We accomplish this by generalizing the discontinuous piecewise constant speed model to a continuous piecewise linear speed model. Regardless of the initial speed, steepness, or profile of the ascent, the optimal strategy tends to a constant ground speed, in agreement with the conclusion of the previous, more restricted, formulation. This new formulation allows us to compare various initial-speed strategies and, hence, has a direct application to competitive cycling. Notably, in timetrials composed of flat and steep sections, it helps one decide whether or not to change the bicycle, which requires stopping and restarting, from one that is more appropriate for flats to one that is more appropriate for uphills.
Keywords
1. Introduction
In this paper, we elaborate on a strategy proposed by Bos et al. [1–3], which could be viewed as Part I of the present work, to minimize the ascent time on a bicycle, which is the goal of timetrials that include hill climbs. In a manner similar to Bos et al. [3], we assume that the ascent, including distance and steepness, is known, and so is the weight of the bicycle-cyclist system, as well as fitness level, quantified by the power output, which—for the last quarter of the century—has been the key metric in training and race preparation. Other known information consists of the air, rolling, and drivetrain resistances.
In contrast to Bos et al. [1–3], we do not restrict our study to flying starts with an initial speed determined by the model and its optimization but allow different initial speeds, including a standstill departure and a launched start, which are the two cases exemplified in this paper. We accomplish this by generalizing the discontinuous piecewise constant speed model of the previous paper to a continuous piecewise linear speed model. This modification, which renders the model more flexible and empirically adequate, entails challenges in its formulation and subsequent computations.
Several other authors used similar mathematical models to conduct studies on uphill timetrialing. Atkinson et al. [4] analyze variable versus constant power strategies with consideration of the cyclist power output, gradient of an ascent, and wind velocity for three race courses of varying lengths. Boswell [5] considers a differential equation model under the constraint of a constant-average power and considers various pacing strategies to find that substantial time savings can be realized by cyclists increasing their power on uphill sections and suitably reducing their work rates elsewhere. Also, Boswell [5] includes a derivation of an optimal pacing strategy, subject to a constant average power, to be a constant speed, which is similar to the findings of Bos et al. [1–3] but does not consider a maximum power. Roa and Muñoz [6] develop a methodology to analyze the bicycle change strategy for hilly timetrial races, which involves solving an optimization problem to minimize the race time of a predetermined route as a function of the bicycle-change location along the route. Feng et al. [7] incorporate empirical fatigue power profiles of professional cyclists and, based on the principles of mechanics and biological fatigue, solve optimization problems for the shortest competition finishing time implemented on the men 2021 UCI and women 2021 Olympic individual timetrial courses.
We begin this paper by invoking a phenomenological model to estimate the power required for a given speed. This model and its notation are similar to the ones used and discussed in several previous studies by Bos et al. [1–3,8,9]. Subsequently, we examine a numerical solution of the ascent-time minimization, and exemplify this solution for both standstill departures and launched starts. We conclude the paper by commenting on advancements with respect to the formulation of Bos et al. [1–3] and on the application of this work to competitive cycling.
2. Phenomenological power model
2.1. Physical considerations
We consider a phenomenological model for a bicycle-cyclist system of mass m moving with ground speed V.
1
The effort expended by the cyclist is quantified by power

where λ is the drivetrain-resistance coefficient.

where g is the acceleration due to gravity, θ is the slope angle, and ρ is the air density. Thus, the three model parameters are the aforementioned λ, together with the rolling-resistance coefficient,
2.2. Power-model discretization
In previous studies, Bos et al. [1–3] sought to determine the optimal strategy for minimizing the ascent time subject to the constraint of a given average power. The hill was assumed to have no flat or descent sections and was modeled by N straight-line segments. Each segment was traversed at a constant speed with discontinuous speed between segments. Herein, the hill exhibits the same characteristics, but the speed is represented by a piecewise linear interpolation of values at the endpoints of each segment. This assumption corresponds to assuming a constant acceleration on each segment.
Bos et al. [3] neglected the first term in the numerator of expression (2), which is the power,
In accordance with expression (2), the power model for the cyclist can be written as

Therefore, the total work done is

where the first term in parentheses represents the change in kinetic energy. Note that the remaining integral contains
Assuming the cyclist starts from rest,

Computationally, discretizing the case of
Within the integrand of expression (5), the increment of the work done against forces opposing the motion is

Since
The only non-integrable contribution to work comes from opposing air resistance.
To calculate this contribution, we discretize the path into N straight-line segments with lengths

where

where σ and τ are the integration variables in place of arc length and time, respectively. Substituting speed (8) and evaluating the integrals, we solve for the distance traveled and define

Evaluating expression (10) at the end of the jth segment, we obtain

where

Also, with expression (11), the acceleration on the jth segment can be expressed with respect to change in t as well as change in s by

Now, returning to the expression (7), we evaluate the remaining integral as a summation along the jth segments of the path using speed (8). Considering only the integrable factors of the term, as

Proceeding with u-substitution for the summand, we let

However, in view of slope (13), expressed in terms of the jth segment distance, we simplify the result of integral (15) as

where

Therefore, the work done against air resistance may be written as

Then, in accordance with expression (4), the total work done—in its discretized form—is

where

In a similar manner, using expression (11), the total ascent time can be discretized as

Along with these considerations, using work (19) and time (21), the average power along the ascent is

Returning to model (2), its discretized form can be written as

where

3. Minimum ascent time
3.1. Preliminary comments
According to Bos et al. [1–3], if the only constraint is a given average power, the optimal strategy for minimizing the ascent time of a cyclist is by a constant speed. To obtain this result, the authors neglected changes in kinetic energy and assumed that each discretized segment of the ascent is traversed at a constant speed with discontinuous speed between segments, since in the limit—as the number of segments tends to infinity—any speed can be approximated with arbitrary accuracy. The authors also considered the case of an average-power constraint subject to a maximum power,
In this section, we revisit the minimum-ascent-time problem but include the power associated with changes in kinetic energy. We assume the speed to be piecewise linear and continuous between segments and the average power to be constrained to a specified average power,

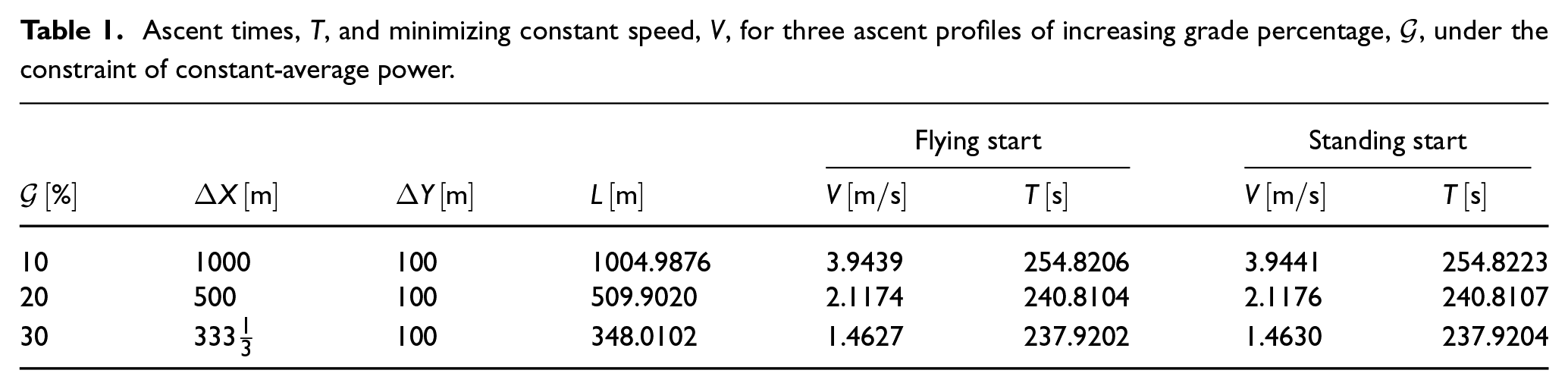
For the numerical considerations, we use three constant-grade ascents of
3.2. Average-power constraint
Using MATLAB [10]’s
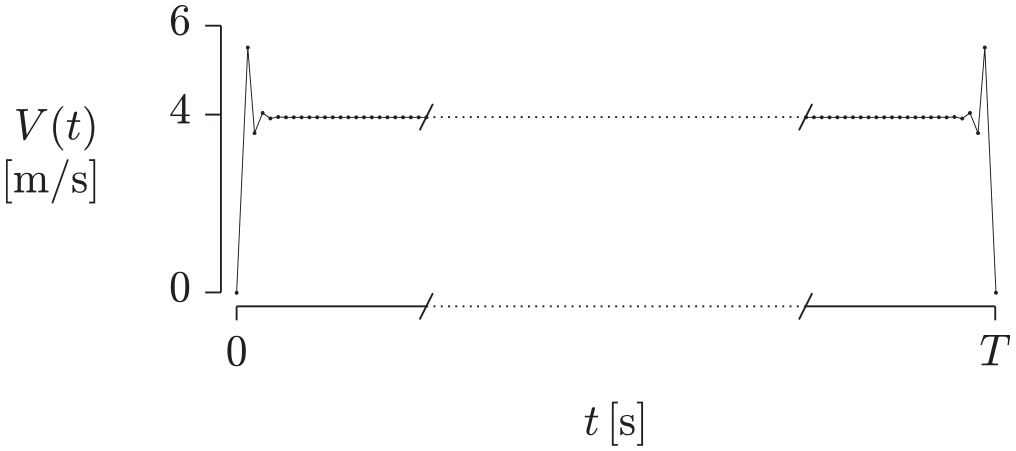
Segment speeds that minimize the ascent time along the 10%-grade ascent. The Heaviside step exhibits the Gibbs phenomenon due to a discretized formulation. The speed in the omitted region, marked by slashes on either side of the dotted line, is constant at
The Gibbs phenomenon is well known in Fourier analysis. It arises if one approximates, for example, a square wave by a finite Fourier series. The Fourier series is smooth—indeed infinitely so—and hence, there is a conflict between the approximated square wave and the smooth approximating series. This results in over- and under-shoots known as “ringing.” The Gibbs analysis quantifies the percentage of overshoot. Our case, due to the finite-dimensional nature of the approximant, is analogous.
Both the constant speed and the ascent time are consistent with the results found by Bos et al. [1–3]—achieved with the same discretization and average-power constraint, but with a flying start—who found the constant speed of
For N =
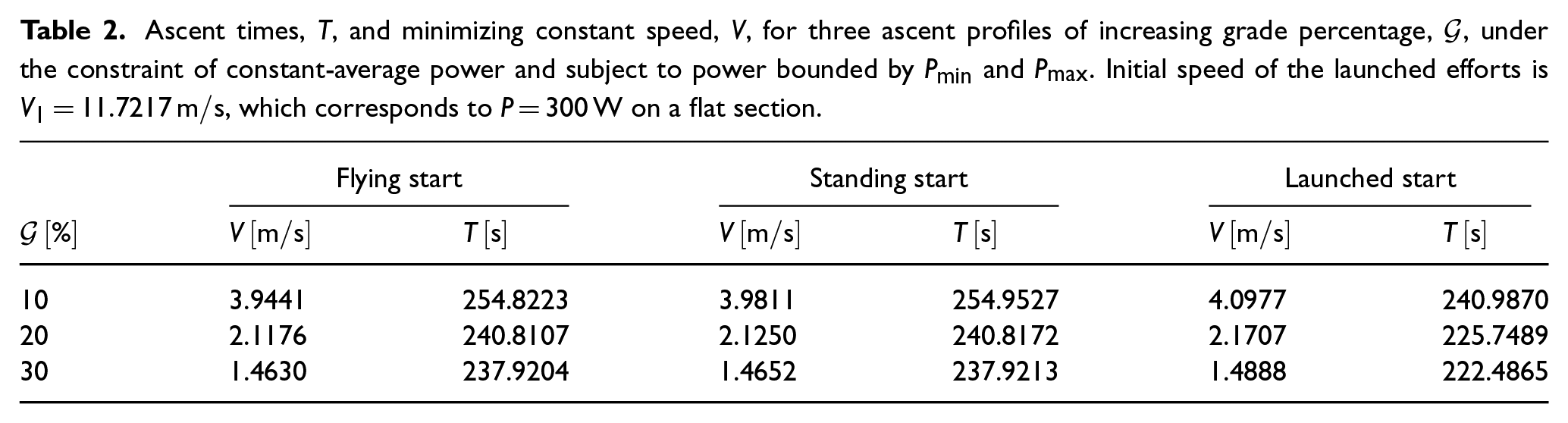
Ascent times, T, and minimizing constant speed, V, for three ascent profiles of increasing grade percentage,
3.3. Average-power constraint subject to bounded power
To render the solution physically reasonable, we constrain the power on each segment by its minimum and maximum value. To do so, we use expression (24), at the endpoints of jth segment, so that

Returning to MATLAB [10]’s
Choosing the
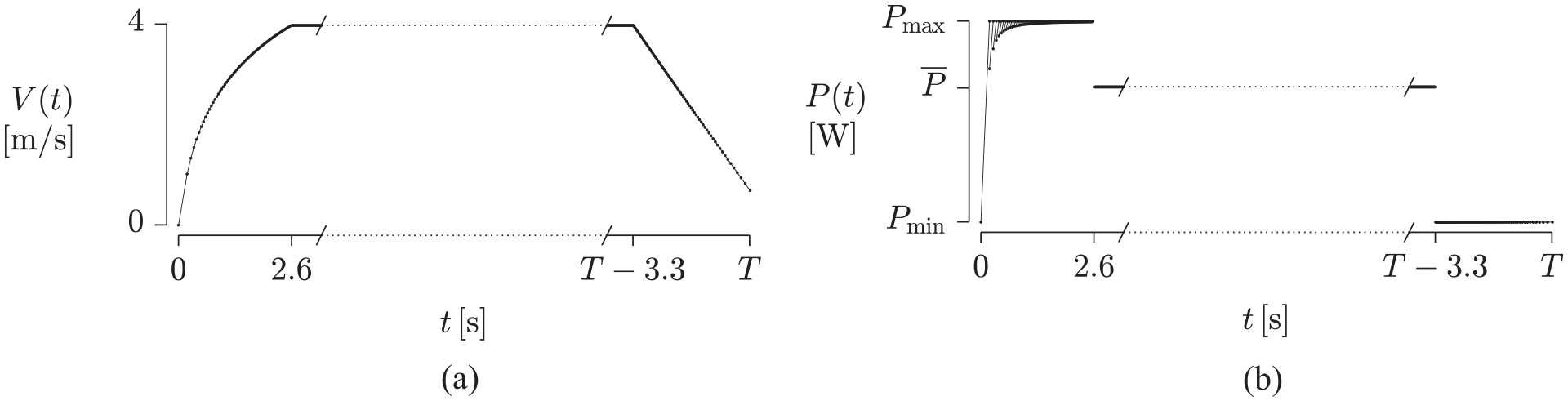
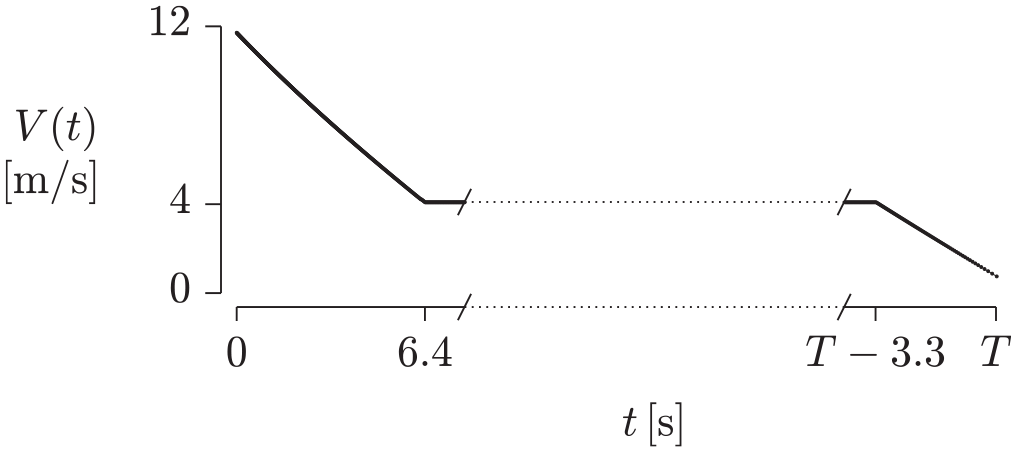
Segment speed and power that yield a minimum ascent time of
These results, along with those for the
Ascent times, T, and minimizing constant speed, V, for three ascent profiles of increasing grade percentage,
The deceleration at the end of the ascent found in the numerical solution and shown in Figure 1 may appear surprising, since it results in a longer ascent time than maintaining a constant speed would. However, it is intuitively understandable. Since the solution minimizes the ascent time T, the average-power constraint in equation (22) implies that the total work W is also minimized. The numerical solution accomplishes this objective by minimizing
3.4. Launched start
Let us consider a case for which the cyclist approaches the ascent along a horizontal road. Given the power along that road that is equal to the average-power constraint,
Letting P =

herein, the solution is V=
Segment speeds that yield a minimum ascent time of
One of the main applications of a launched-start model is to gain an insight into timetrials composed of flat and steep sections by examining a strategy of stopping before the ascent to change a bicycle that optimizes a flat course, where the effort is dominated by overcoming air resistance, to a bicycle for an ascent, where the effort is dominated by overcoming gravity. Comparing the ascent times in Table 2 for the standing and launched starts, we notice a significant time loss due to stopping and restarting. One needs to decide whether or not such a loss is more than compensated by a choice of a more appropriate bicycle.
Let us consider a flat course ending with a
If there is no bicycle change, the cyclist starts the ascent with
If the cyclist changes for a lighter bicycle that results in m =
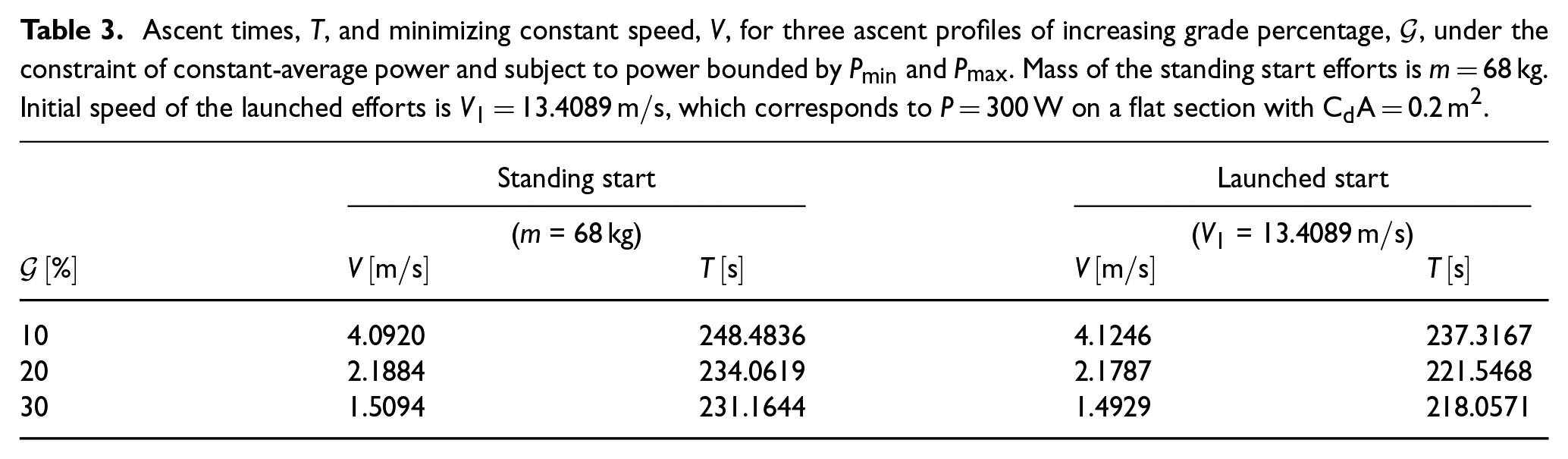
Comparing these ascent times, we see that, in this case as well as for the two other cases shown in Table 3, restarting with a lighter bicycle is not sufficiently beneficial; launched starts still result in shorter times. Nevertheless, comparing the ascent time for standing starts in Table 2 with corresponding times in Table 3, we notice a significant, albeit overall insufficient, improvement with a lighter bicycle.
Ascent times, T, and minimizing constant speed, V, for three ascent profiles of increasing grade percentage,
The formulation presented herein allows us to adjust input parameters for a problem at hand to help in choosing a race strategy by quantifying the wisdom of an adage that the longer and steeper the ascent the more likely one benefits from a bike change, as illustrated in a specific example by Bos et al. [11, Appendix A]. To arrive at a final decision, a competitor also needs to take into account time spent for such actions as slowing down at the end of a flat section and the bike change itself, which are not included in this formulation.
4. Conclusion
Generalizing the formulation of Bos et al. [1–3] by not restricting the initial speed to a value determined by the model and its optimization, we gain an insight into the optimization process and its results. Similarly to the result proven analytically by Bos et al. [3] in the aforementioned formulation, the minimization tends to a constant speed for the ascent regardless of the initial speed and the ascent profile. Notably, as stated in Tables 1 and 2, the ascent times are almost identical to those in Bos et al. [3].
In the present paper, for conciseness and ease of comparison, we use only constant-grade ascents. However, we have confirmed by numerical experimentation that the minimization tends to a constant speed for arbitrary ascent profiles, such as the ones discussed by Bos et al. [3], and shown in their Figures 4(b)–(e). This remains true for models subject to the average-power, minimum-power, and maximum-power constraints. If the two latter constraints are included, a resulting constant speed is different from the one under the average-power constraint alone to accommodate the parts of the ascent that are restricted by the power bounds.
This generalization also renders the model more flexible and empirically adequate. As discussed in Section 3, the model is ready to be used for uphill timetrials and for timetrials composed of flat and steep sections. Future work might focus on presenting strategies for specific races and examining their results.
Footnotes
Acknowledgements
We wish to acknowledge insightful editorial comments and proofreading of David Dalton. Also, since phenomenological models require an evaluation of their empirical adequacy, we would like to acknowledge the cycling team of Matteo Bertrand and Alberto Demicheli, guided by G. Andrea Oliveri. Finally, we would like to thank the anonymous reviewers for their insightful comments, which helped to clarify and strengthen the paper.
Authors’ note
This article is dedicated to Marcelo Epstein, a dear friend and colleague, on his eightieth birthday. One of the authors, M.A.S., who was his student, cherishes in particular Marcelo’s insights into abstractness of mathematics, which allows us to apply similar methods within a plethora of contexts. In this paper, we examine the least-time strategy for a racing cyclist, which bears some resemblance to Fermat’s principle of stationary time for ray theory in layered media within continuum mechanics.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The research is partially supported by the NSERC Discovery Grant RGPIN-2018-05158 of M.A.S.
Data availability statement
Interested readers might contact the corresponding author for computations with a variety of input parameters.