
Abstract
We reconsider the question of the representation of an isotropic symmetric second-order tensor-valued function of two symmetric second-order tensors. This question goes back roughly 70 years and represents the attempt to duplicate the stunning result possible when the function depends only on one tensor input. Over the years, there have been numerous attempts to derive a general representation theorem for such functions, and the literature is replete with conflicting statements as to the appropriate form. By focusing on the Cayley–Hamilton theorem for three-by-three matrices, we are able to arrive at a general result applicable to isotropic functions using nine tensor-valued basis functions. With the addition of an argument exploiting the Cayley–Hamilton theorem for two-by-two matrices, we are able to show that the complete function basis reduces to only involve eight tensor-valued basis functions. Our result clarifies which historically advocated representations are complete and non-redundant without need for complex qualifying cases based on the eigen-structure of the input tensors. The arguments are straightforward and only involve basic algebraic considerations with an intentional focus on Cayley–Hamilton-based reductions.
1. Revisiting isotropic representations
In this contribution, we reconsider the representation formulas for isotropic symmetric second-order tensor-valued functions of two symmetric second-order tensors. The topic has been studied for over 70 years, beginning with works by Rivlin and Ericksen [1] and Smith [2], followed by Wang [3], further refinements by Smith [4], and the works of Zheng [5], among quite a few others. In the case of symmetric tensor-valued functions of one symmetric tensor, the derivation of isotropic representations can be “cleanly” achieved through usage of the Cayley–Hamilton theorem, which guarantees a tensor

where
For functions of two or more tensors, however, the representations obtained since the 1950s have not relied (solely) on implications of the Cayley–Hamilton theorem. Rather, they have been surmised using algebraic considerations that are sometimes daunting to follow and have resulted in proposed forms that have required amendment over time. While it is certainly true that the necessity of a term within a representation can be shown by example (see Pennisi and Trovato [9]), it is difficult to deduce the span; that is, whether the proposed representation can be proven to generate all isotropic functions or at least some broad subset.
In this brief note, we take up this foundational issue and first look at how general of a result one can arrive at on the basis of applications of the 3D Cayley-Hamilton theorem alone. We will see that the best one can do is the reduction to the form:

where

There can be no fewer than the number of terms in equation (3) as can be shown by direct example [9]; thus, no more reduction is possible and the correct dimension of the tensor function basis is eight. This result only relies on the assumed existence of a tensorial expansion of
2. Brief historical recap
The literature contains a number of conflicting and difficult to follow developments by some of the seminal figures in continuum mechanics. Without in any way attempting to be comprehensive in citation of all works, we provide a brief road map to some of the most cited developments that took place with respect to the special representation question addressed in this note, viz. representations for isotropic symmetric second-order-tensor-valued functions of two symmetric second-order tensors. The developments are shown in Table 1 in a chronological order. Some useful definitions and facts for understanding the papers are as follows:
The 10 basic invariants are
The methods of proof usually differ in their approach. If a paper utilizes an approach invoking Cayley–Hamilton arguments, we denote it by CH. If a paper utilizes solvability conditions based on non-zero determinants of linear equations, we denote it as S. If a paper utilizes a co-set invariance argument, we denote it as Co. If the method of analysis is unclear to us, we denote it as unc.
It can be seen in the table that the
Brief historical summary of the fourth-order term and the chronological developments.
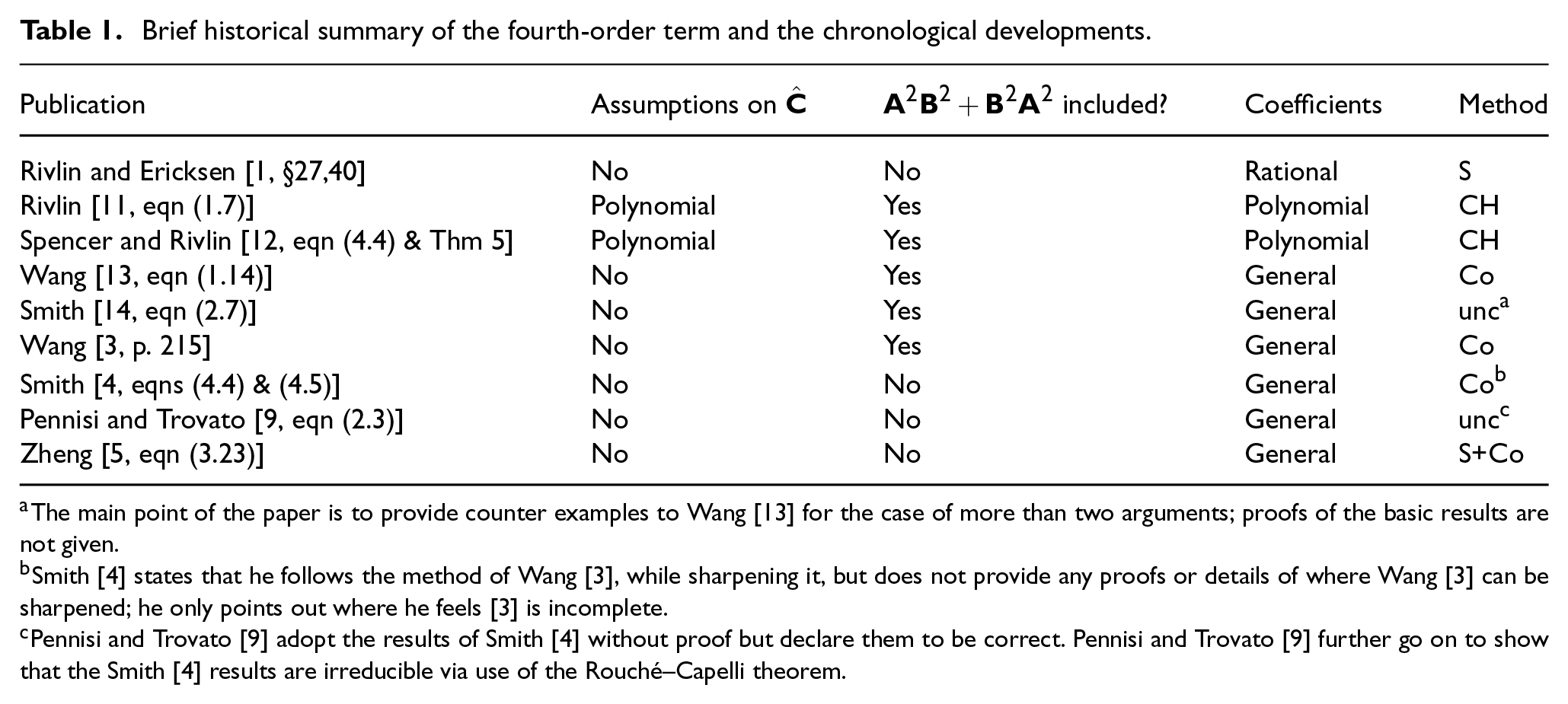
The main point of the paper is to provide counter examples to Wang [13] for the case of more than two arguments; proofs of the basic results are not given.
3. The two tensor argument case
We take a moment to attempt a derivation which appears different from what we see in the existing literature, focused on the case of symmetric tensor-valued functions of two symmetric tensors.
1
The representation derived below relies on reductions from the Cayley–Hamilton considerations and is (i) guaranteed to span a particular isotropic function space and (ii) never encounters “corner cases” where certain choices of

is an isotropic symmetric-tensor-valued function.
3
The scalars
Our goal is to collapse this space of tensor-valued functions into a representation with the fewest terms allowable using repeated application of Cayley–Hamilton-based reduction.
The intentionally broad form of equation (4) is chosen to be able to represent general isotropic tensor functions, noting that it contains infinitely more terms than any of the previously suggested representations. However, we cannot rule out at this stage the possibility that there may exist an isotropic function that is inexpressible via equation (4). But we further recognize that equation (4) is sufficiently general for most applications. As such, we restrict our attention to relations of this form.
3.1. Cayley–Hamilton reducers
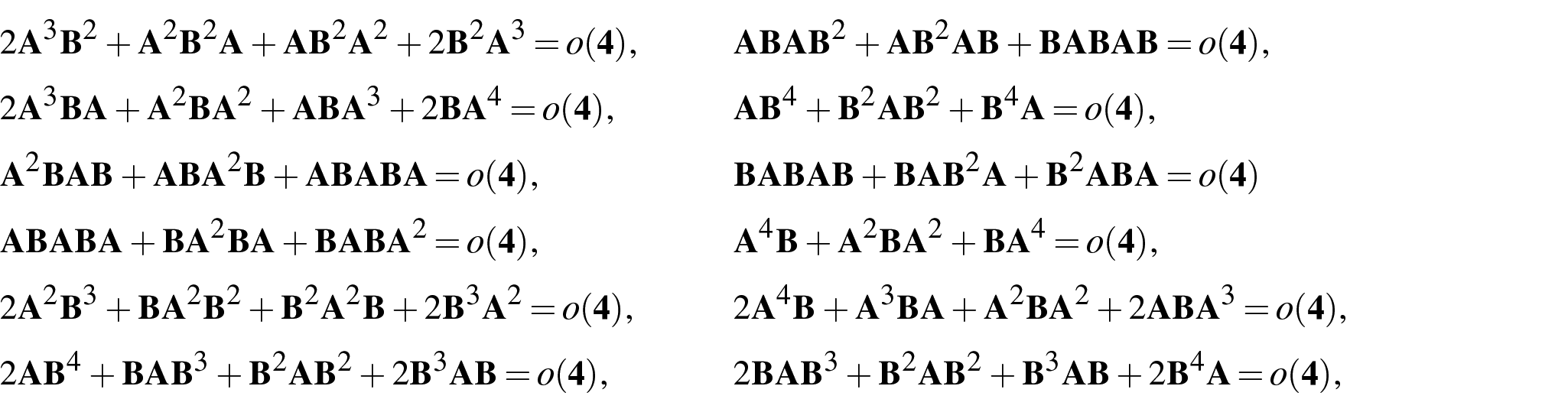
First, we determine which joint powers of

Let us apply this rule to progressively higher-order polynomials in

We introduce the shorthand

Since right-hand side of equation (6) is

The above is a polynomial in

The first and last reductions in the above are well known from the one-input case; e.g., that
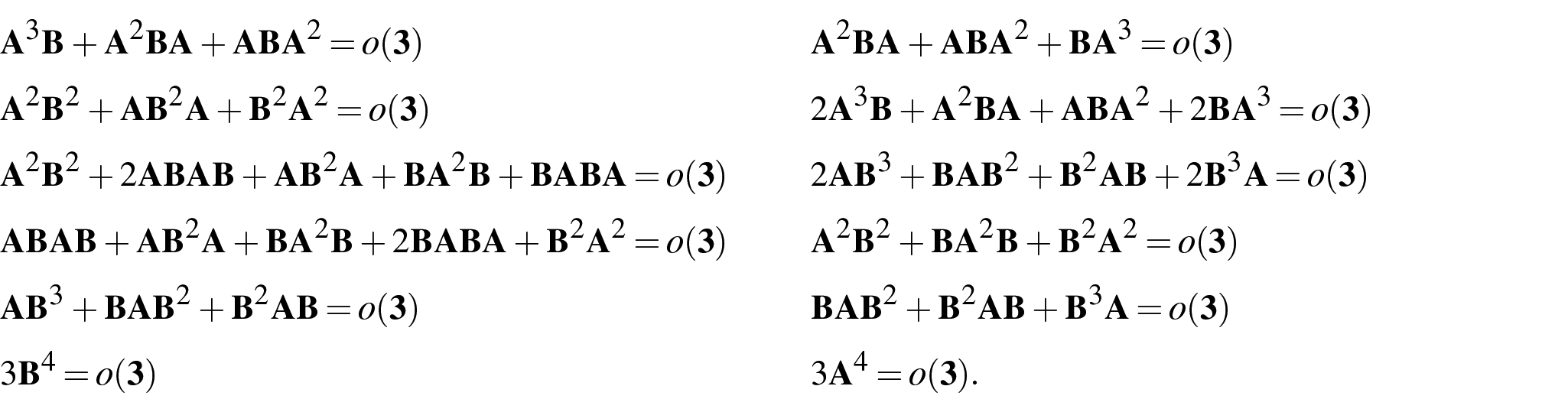
The same technique can be applied to determine reductions at higher orders. For example, if we use a second-order tensor polynomial on the left-hand side of equation (5), we get:

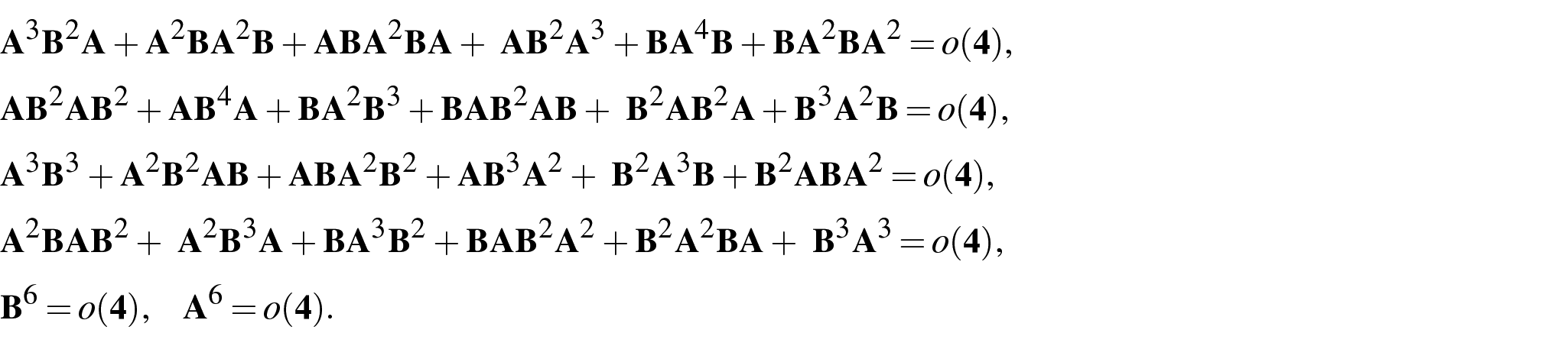
Expanding both sides of the above gives very long expressions. However, all terms of order five or higher in
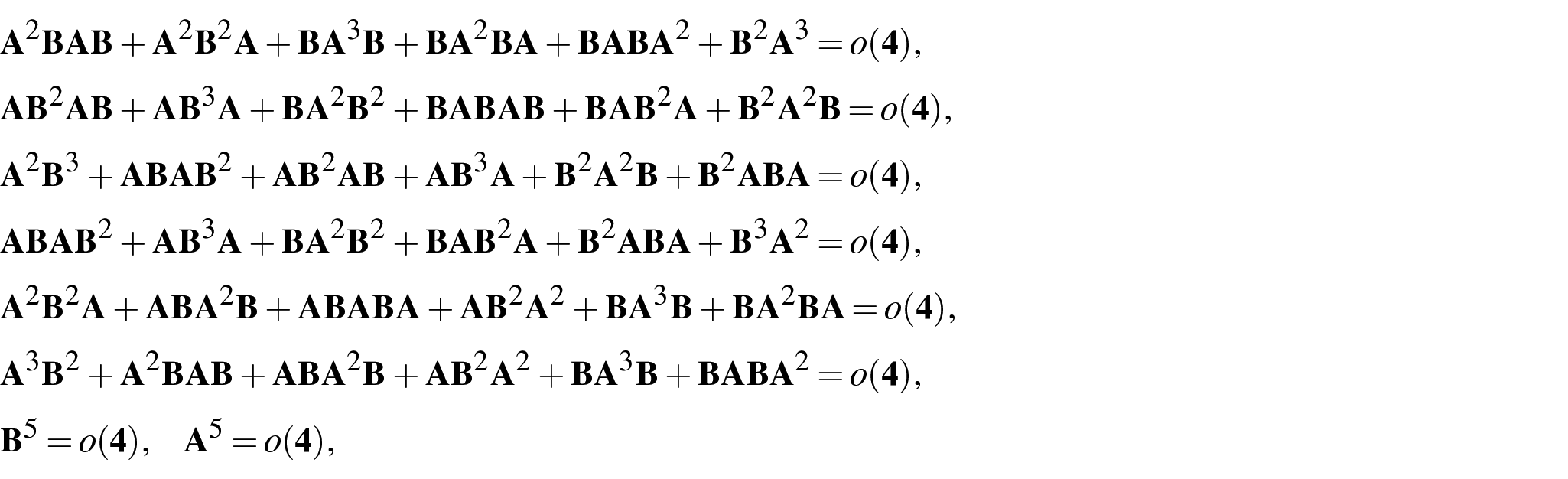
and a set of twenty 6-reducers also equal to
It is clear that some of these reductions could have been inferred from the 3-reducers in equation (8). For example,
With a careful eye, it can be seen that equation (9) also discloses a set of 4-reducers. The left and right sides of equation (9) each produce tensorially fourth-order terms. While many of these cancel each other, some do not. For example, fourth-order terms multiplying
Aside from the primary reductions listed so far, reductions of a secondary nature must also be considered. That is, any reduction shown on one of the above lists can be multiplied on the left or right by
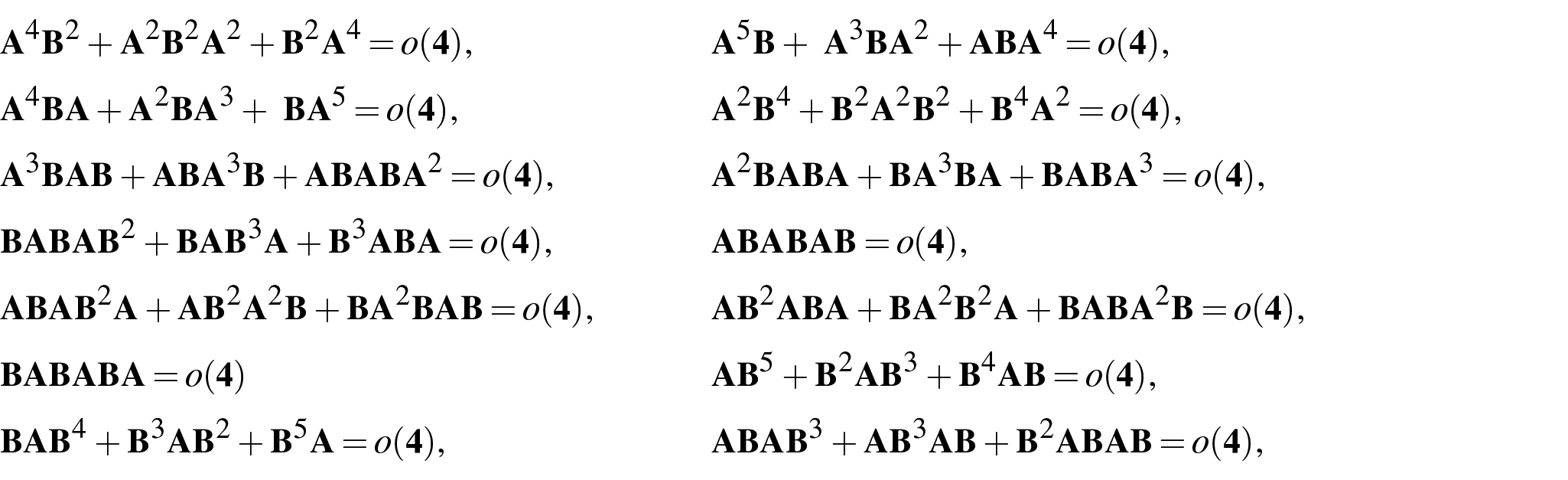
With
The same method for determining the number of irreducible terms can be used at progressively higher orders without affecting results from previous orders. We find the number of irreducible terms at fourth-, fifth-, and sixth-order are, respectively,
3.2. Greatest reduction via strictly 3D Cayley–Hamilton-based arguments
A particular representation can be found by identifying two third-order terms and one fourth-order term, which, when included within the sets

This final result, which includes the fourth-order term, is identical to that of Wang [3], Rivlin [11], Spencer and Rivlin [12], Wang [13] and Smith [14] but differs from Rivlin and Ericksen [1], Smith [4], Zheng [5] and Pennisi and Trovato [9] whose representations are the same except without the fourth-order term. Any representation without the fourth-order term, as we have derived, would require reductive algebra beyond 3D Cayley–Hamilton considerations.
4. Showing the
term is unnecessary
The previous argument concluded that the representation for
First, Rivlin and Ericksen [1] (in §27) showed that the set of tensors:

is a basis for the space of all 3×3 symmetric tensors in the special case that (i)
To show that the
Condition (i) not met—Repeated eigenvalues. We will prove the stronger result that

and thus,

The repeated eigenvalue means that

where
Condition (ii) not met—common eigenvector. Suppose

Here, we obtain the result:

which shows, again,
Since we have now shown that

Since, as shown by counterexample in Pennisi and Trovato [9], the representation for
5. Summary
In this paper, we have revisited the topic of isotropic representations of tensor-valued functions of multiple tensors, a topic with a long and somewhat daunting literature of development over the last 70 years or so. Our emphasis here was twofold. Our first goal was to help resolve the question of how many terms the representation needs in the case of two symmetric inputs and one symmetric output. This case carries prime relevance in mechanics where one might want, for example, a function for stress in terms of a symmetric deformation variable (e.g., strain or strain-rate) and a symmetric tensorial variable representing the structural state of the material. The second goal of this paper was to carry out the derivation in a clear fashion relying primarily on consequences of the Cayley–Hamilton theorem in three dimensions and then in two dimensions.
The derivation described herein takes the following route to obtain the final result. First, we consider the broad class of functions in equation (4). We then apply the 3D Cayley–Hamilton theorem to first- and second-order combinations of monomials of
Supplemental Material
sj-m-2-mms-10.1177_10812865251340424 – Supplemental material for Clarifying the representation of isotropic symmetric tensor-valued functions of two symmetric tensors
Supplemental material, sj-m-2-mms-10.1177_10812865251340424 for Clarifying the representation of isotropic symmetric tensor-valued functions of two symmetric tensors by Ken Kamrin and Sanjay Govindjee in Mathematics and Mechanics of Solids
Supplemental Material
sj-py-1-mms-10.1177_10812865251340424 – Supplemental material for Clarifying the representation of isotropic symmetric tensor-valued functions of two symmetric tensors
Supplemental material, sj-py-1-mms-10.1177_10812865251340424 for Clarifying the representation of isotropic symmetric tensor-valued functions of two symmetric tensors by Ken Kamrin and Sanjay Govindjee in Mathematics and Mechanics of Solids
Footnotes
Appendix 1
Acknowledgements
This paper is dedicated to Rohan Abeyaratne on the occasion of his 70th birthday.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Supplemental material
Supplemental material for this article is available online.
Notes
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.