We analyze the finite-strain Poynting–Thomson viscoelastic model. In its linearized small-deformation limit, this corresponds to the serial connection of an elastic spring and a Kelvin–Voigt viscoelastic element. In the finite-strain case, the total deformation of the body results from the composition of two maps, describing the deformation of the viscoelastic element and the elastic one, respectively. We prove the existence of suitably weak solutions by a time-discretization approach based on incremental minimization. Moreover, we prove a rigorous linx earization result, showing that the corresponding small-strain model is indeed recovered in the small-loading limit.
Viscoelastic solids appear ubiquitously in applications. Polymers, rubber, biomaterials, wood, clay, and soft solids, including metals at close-to-melting temperatures, behave viscoelastically. The mechanical response of viscoelastic solids is governed by the interplay between elastic and viscous dynamics: by applying stresses, both strains and strain rates ensue [1]. This is on the basis of different effects, from viscoelastic creep, to viscous relaxation, to rate dependence in material response, and to dissipation of mechanical energy [2].
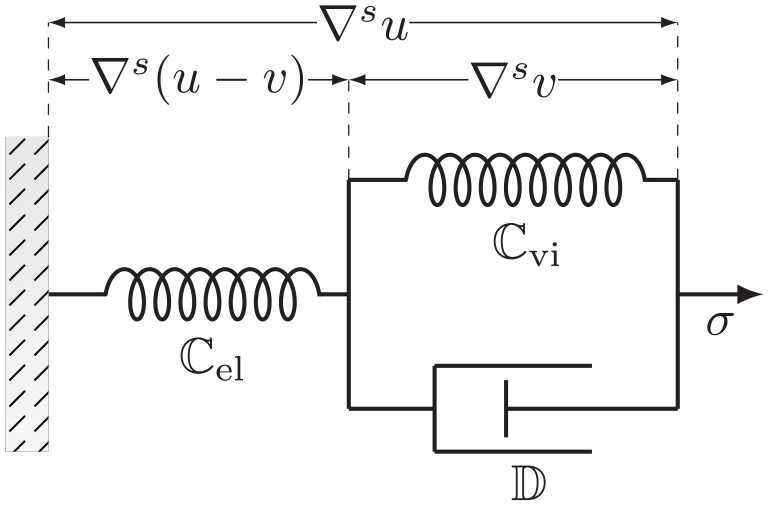
The modelization of viscoelastic solid response dates back to the early days of Continuum Mechanics. In the linearized, infinitesimal-strain setting of the standard-solid rheology, two basic models are the Maxwell and the Kelvin-Voigt, where an elastic spring is connected to a viscous dashpot in series or in parallel, respectively. These models offer only a simplified description of actual viscoelastic behavior. More accurate descriptions necessarily call for more complex models. The first option in this direction is the Poynting–Thomson model, resulting from the combination in series of an elastic and a Kelvin–Voigt component (see Figure 1). The second option would be the Zener model, which consists of an elastic and a Maxwell element in parallel. Note, however, that Poynting–Thomson and Zener can be proved to be equivalent in the linearized setting (see Kruzík, M and Roubíček [3, Remark 6.5.4]).
The Poynting–Thomson rheological model (linearized setting).
The aim of this paper is to investigate the Poynting–Thomson model in the finite-strain setting. From the modeling viewpoint, extending the model beyond the small-strain case is crucial, for viscoelastic materials commonly experience large deformations. In fact, finite-strain versions of the Poynting–Thomson model have already been considered. The reader is referred to Lectez and Verron [4], where a comparison between Poynting–Thomson and Zener models at finite strains is discussed and to Meo et al. [5], focusing on the anisothermal version the Poynting–Thomson model.
To the best of our knowledge, mathematical results on the finite-strain Poynting–Thomson model are still not available. The focus of this paper is to fill this gap by presenting:
an existence theory for solutions of the finite-strain Poynting–Thomson model, as well as a convergence result for time-discretizations (Theorem 4.1);
a rigorous linearization result, proving that finite-strain solutions converge (up to subsequences) to solutions of the linearized system in the limit of small loadings and, correspondingly, small strains (Theorem 4.2).
Our analysis is variational in nature. The convergence result provides a rigorous counterpart to the classical heuristic arguments based on the Taylor expansions [4].
We postpone to section 2 both the detailed discussion of the model and a first presentation of our main results. We anticipate, however, here that the theory requires no second-gradient terms but rather relies on a decomposition of the total deformation in terms of an elastic and a viscous deformation (see equation (3)). Correspondingly, the variational formulation of the problem features both Lagrangian and Eulerian terms. Note, moreover, that the viscous dissipation is here assumed to be -homogeneous, with superlinear homogeneity .
Our notion of solution (see Definition 4.1) hinges on the validity of an energy inequality, an elastic semistability inequality, and an approximability property via time-discrete problems. Albeit very weak, this notion replicates the important features of viscoelastic evolution, including elastic equilibrium, energy dissipation, and viscous relaxation.
Before moving on, let us put our results in context with respect to the available literature. In the purely partial differential equation (PDE) setting, existence results for viscoelastic dissipative systems are classical. The reader is referred to the recent monograph [3] for a comprehensive collection of references. As it is well known, the PDE setting is local in nature and, as such, does not allow considering global constraints such as injectivity of deformations, i.e., noninterpenetration of matter. Variational theories for viscoelastic evolution offer a remedy in this respect. Using the underlying gradient-flow structure of viscoelastic evolution, existence results for variational solutions have been obtained in the one-dimensional [6] and in the multi-dimensional case [7]. The latter paper also delivers a rigorous evolutive -convergence linearization result (see also Krömer and Roubíček [8] for the case of self-contact and Badal et al. [9] and Mielke and Roubíˇcek [10] for some extension to nonisothermal situations). With respect to these contributions, we deal here with an internal-variable formulation, where the elastic variable does not dissipate. From the technical viewpoint, the novelty of our approach resides in avoiding the second-gradient theory by virtue of the composition assumption (3). This impacts on the functional setting, as well as on the required mathematical techniques.
In the different but related frame of activated inelastic deformations, the closest contributions to ours are Mielke et al. [11] and Röger and Schweizer [12], both dealing with rate-dependent viscoplasticity under the multiplicative-decomposition setting. In both papers, the existence of solutions is discussed, by taking into account additional gradient-type terms for the viscous strain. In particular, the full gradient is considered in Mielke et al. [11], whereas in Röger and Schweizer [12] only its curl is penalized. The approach in Röger and Schweizer [12] analogous to ours in terms of solution notion, despite the differences in the model. In contrast with these papers, viscous evolution is here not activated. In addition, by not considering here additional gradient terms, we avoid introducing a second length scale in the model and thus tackle so-called simple materials. Moreover, we investigate here linearization, which was not discussed in Mielke et al. [11] and Röger and Schweizer [12].
In the fully rate-independent setting of activated elastoplasticity, the papers Kruzík et al. [13], Stefanelli [14] and Mielke and Stefanelli [15], contribute an existence and linearization theory which is parallel the current viscoelastic one. More precisely, Kruzík et al. [13] and Stefanelli [14] deal with a decomposition of deformations in the same spirit of equation (3), avoiding the use of second gradients, whereas Mielke and Stefanelli [15] features no gradients, but it is a pure convergence result, in a setting where existence is not known. With respect to these contributions, the superlinear, nonactivated nature of the dissipation of the viscous setting calls for using a different set of analytical tools from gradient-flow theory [16]. Note that, also in the rate-independent setting, by including a gradient term of the plastic strain, hence resorting to so-called strain-gradient finite plasticity, one obtains stronger results. In particular, the existence of energetic solutions in strain-gradient finite plasticity is in Mainik and Mielke [17] and the linearization in some symmetrized case is in Grandi and Stefanelli [18]. Under the mere penalization of the curl of the gradient of the plastic strain, the existence of incremental solutions is proved in Mielke and Müller [19] and linearization is in Scala and Stefanelli [20].
This paper is organized as follows. In section 2, we provide an illustration of the finite-strain Poynting–Thomson model under consideration, as well as an introduction to our main results. Some preliminary material and comment on the functional setting is provided in section 3. In particular, we discuss the set of admissible deformations in section 3.2. In sections 4.1 and 4.3, we list and comment the assumptions, whereas the statements of our main results, Theorem 4.1 and Theorem 4.2 are presented in sections 4.2 and 4.4, respectively. The solvability of the time-discrete incremental problems is discussed in section 5, whereas the proofs of Theorems 4.1 and 4.2 are given in sections 6 and 7, respectively.
2. The finite-strain Poynting–Thomson model
In order to illustrate our results, we start by recalling the classical Poynting–Thomson in the linearized setting of infinitesimal strains. Indicating by the infinitesimal displacement from the reference configuration, the total strain (here denotes the symmetrized gradient ) is additively decomposed in its elastic and its viscous parts as . In its quasistatic approximation, the evolution of the body results from the combination of the equilibrium system and the constitutive relation, namely:
where stands for a given body force and denotes the time-derivative of . The reader is referred to the monographs [3, 21, 22] for a comprehensive collection of analytical results. Let us remark that in this paper, we will specifically consider the case of incompressible viscosity, i.e., in the linearized setting . Hence, the evolution of the system considered is actually determined by the following equations:
where denotes the deviatoric part of a tensor. Restricting to the incompressible case would call for accordingly specifying the rheological diagram from Figure 1 by distinguishing the volumetric and the deviatoric components.
In the finite-strain Poynting–Thomson model [4, 5], the state of the viscoelastic system is specified in terms of its deformation. As it is common in finite-strain theories [23], the deformation gradient is multiplicatively decomposed as where and are the elastic and viscous strain tensors, representing the elastic and viscous response of the medium, respectively.
A distinctive feature of our approach is that we assume the viscous strain to be compatible: we identify with the gradient of a viscous deformation, mapping the reference configuration to the intermediate one . Correspondingly, the elastic strain is compatible as well and there exists an elastic deformation , with mapping the intermediate configuration to the actual one. As such, the multiplicative decomposition ensues from an application of the classical chain rule to the composition:
Moving from this position, the state of the medium is described by the pair , effectively distinguishing viscous and elastic responses.
Before moving on, let us stress that the compatibility assumption on , whence the composition assumption (3), realistically describes a variety of viscoelastic evolution settings and refer to Kruzík et al. [13] and Stefanelli [14] for some parallel theory in the frame of finite-strain plasticity. In particular, position (3) is flexible enough to cover both limiting cases of a purely elastic and of a plain Kelvin–Voigt materials. In the linearized setting, these would formally correspond to the cases and , respectively. Let us note that by choosing , the linearized systems (1) and (2) reduces to the Maxwell fluidic rheological model. By assuming equation (3), we exclude the onset of defects, such as dislocations and disclinations. Albeit this could limit the application of the theory in some specific cases, it is to remark that viscous materials are often amorphous, so that the relevance of strictly crystallographic descriptions may be questionable. From the more analytical viewpoint, assumption (3) allows us to present a comprehensive mathematical theory within the setting of so-called simple materials, i.e., without resorting to second-gradient theories. The alternative path of including second-order deformation gradients, is also viable and, as far as existence is concerned, has been considered in Mielke et al. [11] in the activated case of viscoplasticity.
A first consequence of the composition (3) is that the elastic deformation is defined on the a priori unknown intermediate configuration , making the analysis delicate. In particular, the variational description of the viscoelastic behavior results in a mixed Lagrangian–Eulerian variational problem. This mixed nature of the problem will be tamed by means of change-of-variables techniques, which in turn ask for some specification on the class of admissible intermediate configurations. Let us anticipate that will be required to be an incompressible homeomorphism throughout. We refer to Haupt and Lion [24] and Wijaya et al. [25] for models of incompressible viscoelastic solids. As it is mentioned in Devedran and Peskin [26], incompressibility is a somewhat standard assumption in the setting of biological applications (see also Berjamin and Chockalingam [27] for modeling of brain tissues). Our interest in the incompressible case is also motivated by the prospects of devising a sound existence theory. Assuming incompressibility has the net effect of simplifying change-of-variable formulas, ultimately allowing the mathematical treatment.
The stored energy of the medium is assumed to be of the form:
Here and in the following, we indicate by the variable in the reference configuration and by the variable in the intermediate configuration . The first integral above corresponds to the stored elastic energy and the given function is the stored elastic energy density. Its argument can be equivalently rewritten in Lagrangian variables as the usual product . By comparing these two expressions, the advantage of working in Eulerian variables is apparent, for is linear in . The function is the stored viscous energy density instead and the corresponding integral is Lagrangian.
The instantaneous dissipation of the system is given by:
where models the instantaneous dissipation density and is assumed to be -positively homogeneous for .
By formally taking variations of the above introduced functionals, we obtain the quasistatic equilibrium system [28]:
The highly nonlinear character of this system, combined with the absence of higher-order gradients in the viscous variable, forces us to consider a suitable weak-solution notion.
Inspired by Maso and Lazzaroni [29, Definition 2.12] and Röger and Schweizer [12, Definition 2.2], in our first main result, Theorem 4.1, we prove the existence of approximable solutions (see Definition 4.1). These are everywhere defined trajectories starting from some given initial datum and satisfying for all :
where is the set of admissible deformations, introduced in section 3.2. The first line of inequality (6) corresponds to the total energy of the medium at time and state . In particular, the term is the work of the (external) force (later, a boundary traction will be considered, as well). Solutions are, moreover, required to be approximable, namely, to ensue as limit of time discretizations. In this respect, we consider the incremental minimization problems, for ,
on a given uniform time-partition , where the set of admissible states is defined in section 3.2.
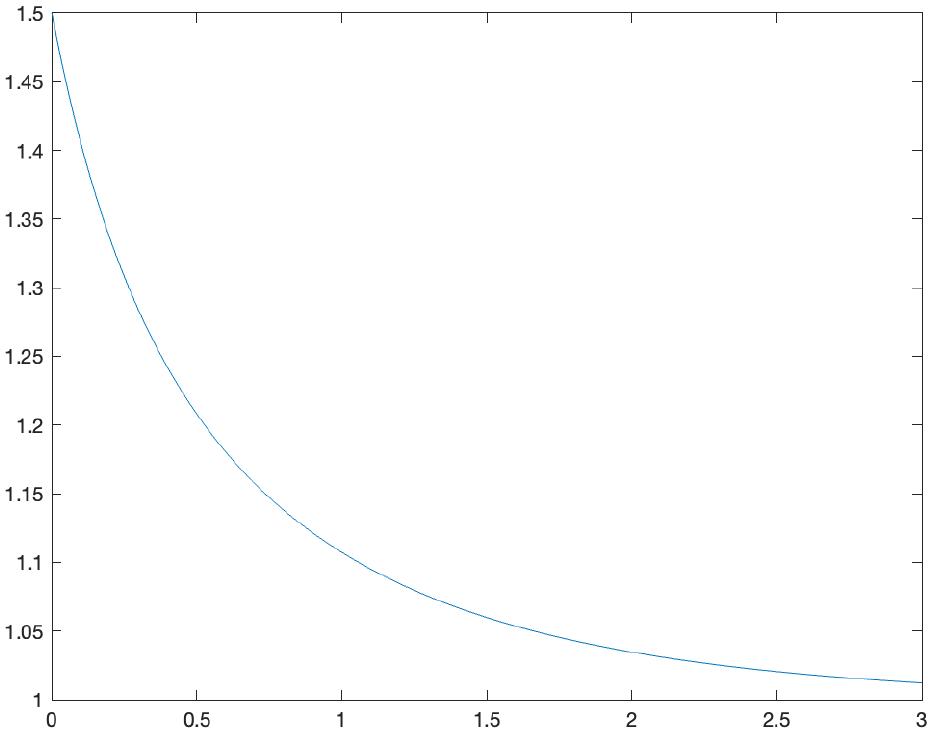
The notion of approximable solution is capable of reproducing the main features of viscoelastic evolution. First, the semistability condition (7) implies that solves the elastic equilibrium at all times, given the viscous-state evolution. Correspondingly, the description of the purely elastic response of the material is complete. Second, the energy inequality (6) is sharp, in the sense that it may indeed hold as equality in specific smooth situations. In other words, all dissipative contributions are correctly taken into account in equation (6). Note in this respect the presence of the factor multiplies the dissipation term in equation (6). Eventually, the approximation property ensures that viscous evolution actually occurs, even in the absence of applied loads. We give an illustration of this fact in section 4.2 (see Figure 2).
Evolution of the viscous strain in the limit from problem (25), starting from .
Under suitable assumptions, the incremental minimization problems (8) are proved to admit solutions in Proposition 4.1. These time-discrete solutions fulfill a discrete energy inequality and a discrete semistability inequality. The existence of approximable solutions (Theorem 4.1) follows by passing to the limit in the time-discrete problems. In order to pass from the time-discrete to the time-continuous energy inequality (6), lower semicontinuity of the energy and dissipation functionals is necessary, which translates in our setting in asking for the polyconvexity of the respective densities. In order to obtain the specific form (6), we need to resort to the notion of De Giorgi variational interpolant [30, Definition 3.2.1, p. 66] and adapt this tool from its original metric-space application to the current one.
For establishing the elastic semistability (7), a suitable recovery-sequence construction is required. This calls for the extension of the elastic deformations from the intermediate configurations to the whole . The possibility of performing this extension requires some regularity of the boundary of the intermediate configurations, which we ask to be Jones domains (see Definition 3.1).
The second main focus of this paper is on the rigorous linearization of the system through evolutionary -convergence [31] in the case of quadratic dissipations, namely, for . Moving from the seminal paper [32] in the stationary, hyperelastic case, the application of -convergence to inelastic evolutive problems has been started in Mielke and Stefanelli [15] and has been applied to different settings. In particular, linearization in the incompressible case has been discussed in Jesenko and Schmidt [33], Mainini and Percivale [34, 35]. The goal is to provide a rigorous formalization of heuristic Taylor expansion arguments which, for the finite-strain Poynting–Thomson model, were already presented in Lectez and Verron [4]. At first, let us review this heuristic by assuming sufficient regularity of all ingredients.
Consider the functions defined as:
so that actually correspond to the -rescaled displacements of , respectively. To compute the linearization, it will be more convenient to work with the pair corresponding to the total and viscous deformations . In particular, we replace and in the stored energy and in the dissipation. By formally Taylor expanding the (rescaled) energy terms and taking , we find:
Here, we have assumed , , and have defined , , and . Moreover, we assume that the force is small, i.e., . Hence, by neglecting the term , which is independent of the displacement, the rescaled loading term reads:
The above pointwise convergences are the classical heuristic linearization procedure. Still, one is left with actually checking that the finite-strain trajectories indeed converge to a solution of the linearized system. This is the aim of our second main result, Theorem 4.2, where we prove that, given a sequence of approximable solutions and upon defining and the corresponding rescaled displacements and , the sequence converges pointwise in time (up to subsequences) to with and satisfying, for all :
The linearized energy inequality and the linearized semistability deliver a weak notion of solution for the linearized problems (1) and (2). Albeit equations (9) and (10) are too weak to fully characterize the unique solution of linearized Poynting–Thomson systems (1) and (2), the equilibrium system (1) is fully recovered. In particular, is uniquely determined at all times, given . Moreover, the linearized energy equality (9) is sharp and turns out to be an equality in specific cases.
To conclude, let us note that one could alternatively perform the linearization at the time-discrete level and then pass to the time-continuous limit. This way one recovers the unique strong solution of the linearized Poynting–Thomson systems (1) and (2). This fact provides some additional justification of the finite-strain model. Still, we do not follow here this alternative path, which could be easily treated along the lines of the analysis in sections 6 and 7.
3. Preliminaries
We devote this section to setting notation and presenting some preliminary results.
3.1. Notation
In what follows, we denote by the Euclidean space of real matrices, . Given , we define its (Frobenius) norm as , where the contraction product between two-tensors is defined as . Moreover, given a symmetric positive definite four-tensor , the corresponding induced matrix norm is defined as . We denote by the symmetric part of a matrix . We will use the following matrix sets:
The symbol denotes the open ball of radius and center . We make use of the function spaces:
where is a nonempty, open, and measurable subset of .
Moreover, we denote by the -dimensional Hausdorff measure and by the -dimensional Lebesgue measure of the measurable set in .
3.2. Deformations and admissible states
Let us fix the reference configuration of the body to be a nonempty, open, bounded, and connected Lipschitz subset of . We assume without loss of generality that is such that . We let be open subsets of (in the relative topology of ) such that , , and .
The viscous deformation is required to fulfill:
and to be locally volume-preserving, i.e., almost everywhere in . In the following, is tacitly identified with its Hölder-continuous representative. More precisely, and is almost everywhere differentiable (see Fonseca and Gangbo [36]). In addition, since we will use the change-of-variables formula to pass from Lagrangian to Eulerian variables, we require to be injective almost everywhere. Equivalently, we ask for the Ciarlet–Nečas condition [37]:
to hold. As a consequence, we have the change-of-variables formula:
for every measurable set and every measurable function . Note that has distortion, since it is locally volume preserving. As , this bound on the distortion implies that is either constant or open [38, Theorem 3.4]. By the Ciarlet–Nečas condition (11), cannot be constant, and hence, is open. In particular, is an open set. Moreover, we also have that is (globally) injective [39, Lemma 3.3] and that is actually a homeomorphism with inverse (see Fonseca and Gangbo [36]).
In order to make the statement of the model precise, we need to require some regularity of the intermediate configuration . We recall the following definition.
Definition 3.1. (-Jones domain Jones [40]) Let . A bounded open set is said to be a -Jones domain, if for every with there exists a Lipschitz curve with and satisfying the following two conditions:
and
The set of -Jones domains will be denoted by .
In the following, we will exploit the fact that -Jones domains are Sobolev extension domains: for all , , and all there exists a positive constant and a linear operator such that on and:
Note that the class of -Jones domains is closed under Hausdorff convergence [13]. In the following, we will need to consider extensions and we then ask for the regularity:
Finally, since the problem will be formulated only in terms of the gradient of , we impose the normalization condition:
Given a viscous deformation , we assume the elastic deformation to fulfill:
and we tacitly identify with its Hölder-continuous representative.
For all given viscous deformation and elastic deformation , we define the total deformation as the composition of the two, i.e.,
We assume that satisfies a Dirichlet boundary condition on , namely:
Since is invertible and both and are almost everywhere differentiable, the following chain rule:
holds for almost every . Hence, satisfies:
as can be readily checked by a change of variables and by the Hölder inequality. In particular, the boundary condition (13) should be understood in the classical trace sense.
To sum up, the set of admissible states is defined as:
Viscoelastic states are naturally depending on time. From now on, we are hence interested in trajectories in the set of admissible states.
4. Main results
We devote this section to the statements of our assumptions and our main results.
4.1. Assumptions for the existence theory
In this section, we specify the assumptions needed for the existence results, namely, Proposition 4.1 and Theorem 4.1.
The total energy of the system at time and state is given by:
where is the stored energy and the pairing represents the work of external mechanical actions.
More precisely, the stored energy is defined as:
where and are the stored elastic and the stored viscous energy densities, respectively. On the energy densities, we assume that:
(E1) there exist positive constants such that:
for and .
(E2) are polyconvex, i.e., there exist two convex functions such that:
where the minors of are given by :
here, denotes the matrix of all minors of the matrix , for and .
Notice that, since , the mapping is -weakly sequentially continuous. Hence, given in with almost everywhere in , we have that:
As a.e. in , we have that:
by polyconvexity of . In particular, is weakly lower semicontinuous in .
The growth condition (15) ensures that all viscous deformations of finite energy are incompressible. Local elastic incompressibility or even the weaker cannot be required, however. This is due to the fact that we later need to consider the Sobolev extension of from the moving domain to in order to compute the limit of an infimizing sequence. As it is well-known, such extensions may not preserve the positivity of .
On the contrary, our assumptions on the elastic energy density are compatible with frame indifference. In particular, we could ask for every rotation and every . Note nonetheless that this property, although fundamental from the mechanical standpoint, is actually not needed for the analysis. The above assumptions would be compatible with requiring that is invariant by left multiplication with special rotations, as well. Still, such an invariance would be little relevant from the modeling viewpoint, for the viscous energy density is defined on viscous deformations, which take values in the intermediate configuration.
Eventually, the work of external mechanical actions is assumed to result from a given time-dependent body force and a given time-dependent boundary traction as follows:
We assume:
(E3) and where and are the Sobolev and trace exponent related to , respectively (see Roubíček [41]) and the prime denotes conjugation.
Consequently, we have:
where is the dual space of .
Given a time-dependent viscous trajectory , we define the total instantaneous dissipation of the system [11] as:
Here and in the following, the dot represents a partial derivative with respect to time. Above, the dissipation density is assumed to be:
(E4) convex and differentiable at with ;
(E5) fulfilling:
for some positive constant ;
(E6) positively -homogeneous, namely:
The form of the instantaneous dissipation is parallel to the analogous definition in elastoplasticity, where nonetheless is assumed to be positively -homogeneous, namely, [42, 43]. In particular, let us explicitly point out that it does not fall within the frame-indifferent setting from Antman [44]. Indeed, in this case, viscous deformations take values in the intermediate configuration only and frame-indifference should not necessarily be imposed there.
In the following, we ask:
where we have used . In particular, we have that and, by defining by , one has that . Again by Hölder’s inequality, this entails that:
In particular, belongs to with whenever energy and dissipation are finite.
Here and in the following, the symbol denotes a generic positive constant, possibly depending on data and changing from line to line.
4.2. Existence results
Before presenting the statements of our main results, we make the notion of solution to the problem precise. To this aim, let denote the uniform partition of the time interval with time step for every . From now on, let be a compatible initial condition, i.e.,
Given , for all , we define the incremental minimization problems:
We call a sequence of minimizers of equation (22) an incremental solution of the problem corresponding to time step .
Note that incremental solutions exist. In particular, we have the following.
Proposition 4.1. (Existence of incremental solutions) Under assumptions (E1)– (E5) of section 4.1 and equation (21), the incremental minimization problem (22) admits an incremental solution .
The proof of Proposition 4.1 is given in section 5.
In the following, we make use of the following notation for interpolations. Given a vector , we define its backward-constant interpolant , its forward-constant interpolant , and its piecewise-affine interpolant on the partition as:
We are now in the position of introducing our notion of solution to the large-strain Poynting–Thomson model.
Definition 4.1. (Approximable solution) We call an approximable solution if there exists a sequence of uniform partitions of the interval with mesh size , corresponding incremental solutions , and a nondecreasing function such that, for every ,
Our first main result concerns the existence of approximable solutions.
Theorem 4.1. (Existence of approximable solutions) Under the assumptions (E1)–(E6) of section 4.1 andequation (21), there exists an approximable solution .
The proof of Theorem 4.1 is detailed in section 6.
As already mentioned in the introduction, the fact that solutions are approximable ensures that viscous evolution actually occurs, even in the absence of applied loads. We show this fact by resorting to the simplest, scalar model at a single material point. We consider the energy densities, the dissipation to be quadratic, and that no loading is present. More precisely, we let and represent the total and viscous (scalar) strains, respectively, we define , , , and we let for every . In this setting, the discrete incremental problem (22) is specified as:
Take now initial values with , so that some nonvanishing viscous stress present at time . In this case, it is easy to check that the constant in time solution satisfies the energy inequality and semistability, but it is not approximable. This implies that the viscous strain corresponding to an approximable solution must evolve with time (see Figure 2). In this simple setting, asking the solution of the continuous problem to be approximable indeed implies uniqueness, as all discrete trajectories converge to the unique solution of the limiting differential problem.
4.3. Assumptions for the linearization theory
In addition to the assumptions stated in section 4.1, we will require the following conditions in order to prove the linearization result.
On the stored elastic energy density , we assume that:
(L1) is locally Lipschitz;
(L2) satisfies the growth condition:
for some ;
(L3) there exists a positive definite tensor such that, for every , there exists satisfying:
In particular, these conditions imply that is symmetric and:
We can also equivalently state inequality (27) as follows:
Concerning the viscous stored energy density , we ask that:
(L4)
where contains a neighborhood of the identity;
(L5) is locally Lipschitz continuous in a neighborhood of the identity and:
for some ;
(L6) there exists a positive definite tensor such that, for every , there exists satisfying:
or, equivalently,
As above, we have that:
Moreover, there exists a constant (depending only on the compact set ) such that:
and
These last two inequalities will provide -bounds on the terms and later on. Note, however, that the effect of the constraint will disappear as . In particular, the limiting linearized problem is independent of .
On the forcing term , we assume that:
(L7) .
Finally, on the dissipation density , we assume that:
(L8) satisfies the growth condition:
for some ;
(L9) there exists a positive definite tensor such that, for every , there exists satisfying:
(L10) is positively two-homogeneous, i.e.,
The specification of assumption (L10) (compare with the more general from (E6)) is just needed in the linearization setting to recover the linearized energy inequality (37).
4.4. Linearization result
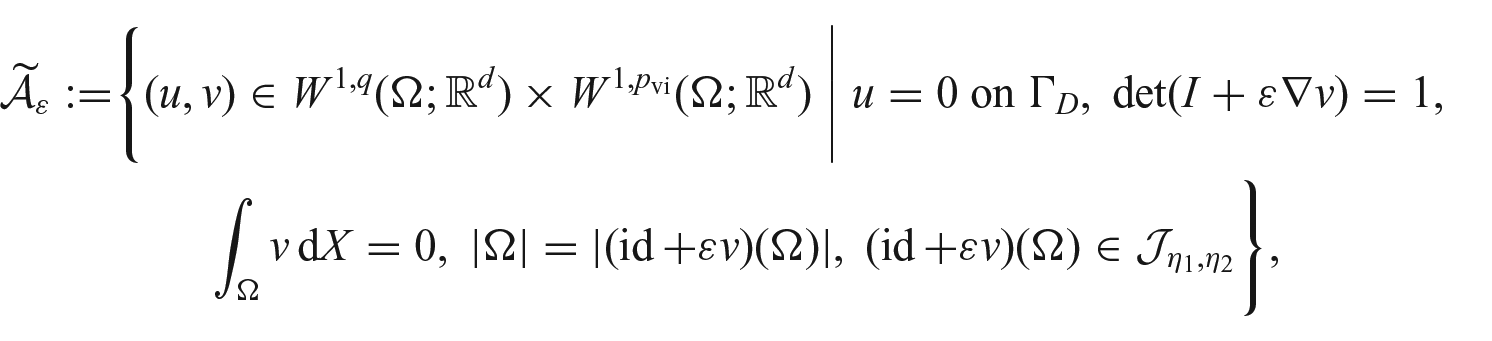
Before moving on, let us reformulate the setting and the existence results of Proposition 4.1 and Theorem 4.1 in terms of the linearization variables and . For all fixed, the admissible set is equivalently rewritten as:
where we recall that is chosen to be such that: so that:
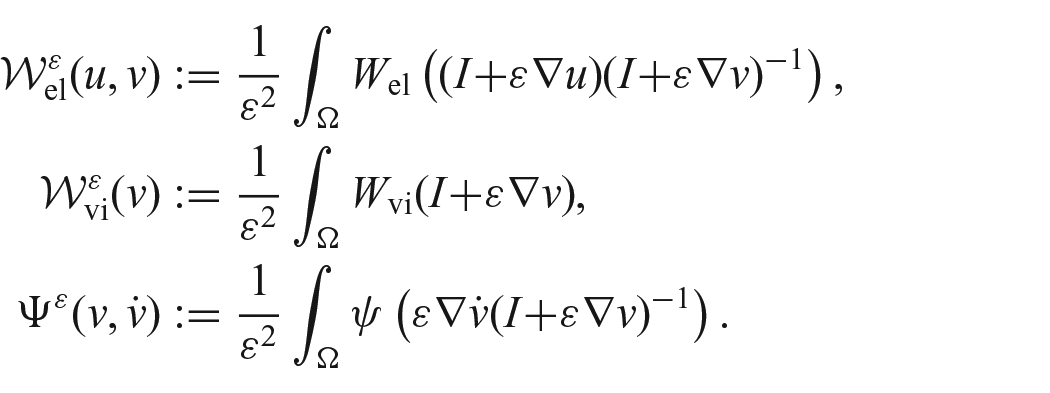
We use the following notation for the rescaled energies and dissipation:
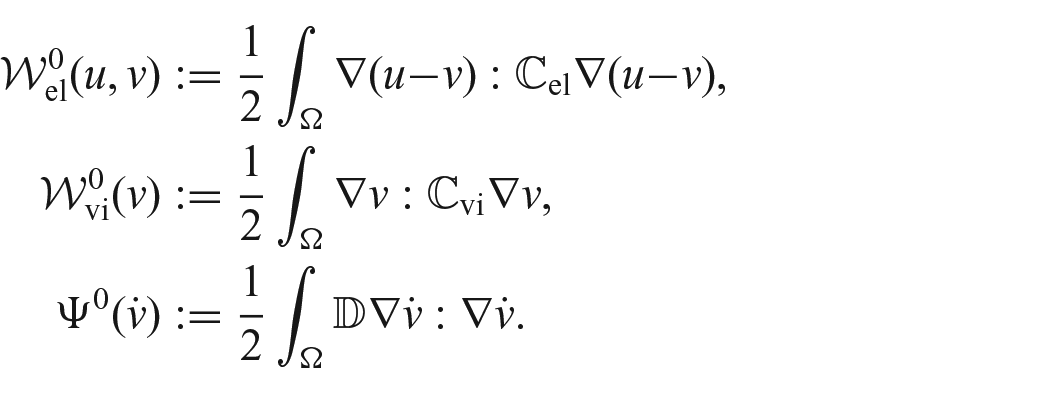
Their corresponding linearized counterparts read:
We also define for brevity:
Finally, let be a well-prepared sequence of initial data, namely:
Proposition 4.1 and Theorem 4.1 can therefore be rewritten in terms of the new variables and in the presence of the rescaling prefactor as follows.
Corollary 4.1. (Existence in terms of ) Under the assumptions (E1)–(E5) and (L10) of section 4.1 andequation (34)for every , there exists a sequence of partitions of the interval with mesh size and functions such that for every :
In the following result, we show that a sequence of approximable solutions at level converges weakly to satisfying the linearized energy and the linearized semistability inequalities.
Theorem 4.2. (Linearization) For every ,let be an approximable solutions given as in Corollary 4.1. Then, under the assumptions (L1)–(L10) of section 4.3 and equation (34), there exist functions such that, for every , up to a not relabeled subsequence:
Moreover, for every, we have:
The proof of Theorem 4.2 is to be found in section 7.
Before moving on, let us remark that the linearized energy inequality (37) and the linearized semistability (38) cannot be expected to uniquely determine solutions of the linearized problem (1) and (2). On the contrary, inequalities (37) and (38) would uniquely characterize solutions to equations (1) and (2) if in addition one assumes that are approximable, namely, they are limits of time discretizations of equations (1) and (2). Although the trajectories are limits of approximable solutions , we are not able to prove that are approximable themselves, for the property of being approximable seems not guaranteed to pass to the linearization limit.
5. Time-discretization scheme: Proof of Proposition 4.1
To start with, notice that the infimum in the incremental problems (22) is finite for every . Indeed, since the initial condition satisfies , by arguing by induction and choosing , we get that:
Fix now and let be an infimizing sequence for problem (22) at time step .
5.1. Coercivity
Let us first show that is bounded in ×. This requires some care since is defined on the moving domain . Since the infimum is finite, we have by equations (14) and (15):
where we have posed . The loading term can be controlled as follows:
This entails that:
which in turn guarantees that:
Now, using the growth condition (15) and the Poincaré–Wirtinger inequality, recalling that has zero mean, we have that:
Recalling that satisfies the Dirichlet boundary condition (13), by the Poincaré inequality, we obtain:
A change of variables ensures that:
so that , as well. Again the Poincaré inequality guarantees that:
Up to a not relabeled subsequence, we hence have that:
We now want to extract a converging subsequence from the elastic deformations , which are, however, defined on the moving domains . Consider the trivial extensions and on the whole by setting and to be zero on , respectively. Recalling the bound (39), we have (up to a subsequence):
We want to show that on the limiting set . By Sobolev embedding, possibly by extracting a further subsequence, we have that uniformly. Letting , for large enough, we eventually have that . By uniqueness of the limit, we have and . Hence, in every . An exhaustion argument ensures that in .
5.2. Closure of the set of admissible deformations
Let us now check that the weak limit belongs to the admissible set . First, since , we have that:
and hence almost everywhere. On the contrary, Lemmas in Kruzík et al. [13] imply that . By the linearity of the mean and trace operators and by the weak convergence of , we find and on . Moreover, by Grandi et al. [39, Lemma 5.2(i)], we have that:
where the symbol denotes the symmetric difference, and, for every , that almost everywhere in . This implies that satisfies the Ciarlet–Nečas condition, since:
It remains to show that . Let us take any measurable and consider, by changing variables,
where, in the last limit, we used the weak convergence of and the strong convergence of . Since is arbitrary, we conclude that . In particular, we have that .
5.3. Weak lower semicontinuity
We aim to show that the functional in equation (22) is weakly lower semicontinuous with respect to the above convergences.
By polyconvexity of the viscous energy density and equation (40), we have:
For what concerns the dissipation, from the weak convergence of in , we also have:
Hence, by the weak lower semicontinuity of , it follows that:
As the loading term is linear, we have:
by weak convergence of .
Finally, for any , we can treat the elastic energy as follows:
where we have used the polyconvexity of and convergence (41). Taking the supremum over , we conclude via an exhaustion argument that:
All in all, we have proved that and:
so that the assertion of Proposition 4.1 follows.
6. Existence of approximable solutions: Proof of Theorem 4.1
We split the proof in subsequent steps. The basic energy estimate and its consequences are presented in section 6.1. The energy estimate is then sharpened in section 6.2, leading to the discrete energy inequality. By taking limits as the time step goes to , the time-continuous energy inequality (23) and the time-continuous semistability (24) are proved in sections 6.3 and 6.4, respectively.
6.1. Energy estimate and its consequences
Let be a solution to equation (22). By minimality, we have, for every ,
Summing up over , we get:
Using the notation for the interpolants, we have, for all
On the contrary, by the growth assumptions (14), (15), and (18), we also have:
In particular, by combining the above two inequalities, we get:
We can apply the Discrete Gronwall Lemma [3, (C.2.6), p. 534] to find:
Thus, for every , we have:
Then, using the Poincaré inequality on the total deformation, we find and hence, as before, for every :
Moreover, thanks to equation (43), we also have for every :
By recalling that , this implies that:
6.2. Energy inequality, sharp version
In the previous section, we have found the energy estimate (42), which features the dissipation with a prefactor . In order to prove the sharp version of the energy inequality (23) with the prefactor , we need a finer argument, mutated from Ambrosio et al. [30].
First, we introduce some notation. Let:
and, for all , define the functionals as:
Recall that, by definition (17) of and by the -homogeneity (19), we have:
For all , we also define the minimal value of the latter functional as:
and denote the set of minimizers by , which is nonempty by Proposition 4.1. Finally, introduce:
We start by stating an auxiliary result, providing the continuity property of the map in and the monotonicity of .
Lemma 6.1.For every and every , we have:
where.
Moreover, if, then:
Proof. We start by proving the continuity property of . Let . By the growth condition (18), the -homogeneity (19), and coercivity, we have:
This proves that in as . Moreover, by equation (39), we have weakly in . Thus, by weak lower semicontinuity, we have:
On the contrary, from minimality, we get . This implies that:
The fact that follows from minimality since:
for every .
Let us now prove the monotonicity of . Let and , . From minimality, we have that:
This implies that:
which concludes the proof. □
In the following Lemma, we calculate the derivative with respect to of the minimal incremental energy and provide a crucial estimate.
Lemma 6.2.For every and , the map is locally Lipschitz on . Moreover, we have:
for almost everyIn particular, for almost every, we have:
for every, for some.
Proof. For every and , , by minimality we have:
where we used equation (45). We can perform an analogous calculation for:
so that, by combining the two above inequalities, for we find:
Taking the supremum over in the left-hand side and the infimum over in the right-hand side, we find:
which implies that is locally Lipschitz. Then, passing to the limit for and , we get equation (48).
We now state the definition of De Giorgi variational interpolation [30, Definition 3.2.1], which in our setting refers to the viscous deformation only.
Definition 6.1. (De Giorgi variational interpolation) Let be an incremental solution of the problem ofequation (22). We call De Giorgi variational interpolation of any interpolation of the discrete values with that satisfies:
for every.
The following proposition provides the sharp energy estimate on the discrete level, providing an equality instead of an inequality.
Proposition 6.1. (Discrete energy equality) Let be an incremental solution of the problem ofequation (22). Then, for every , we have:
where we used the definition of and of De Giorgi variational interpolation. Then, summing from to , we get equation (50). □
Before passing to the limit for in the energy equality (50), we need to characterize the limit of the De Giorgi variational interpolation. In the following lemma, we show that such limit coincides with that of the backward interpolants.
Lemma 6.3.If in , then in .
Proof. First, let us show that, for and fixed, . We have, by definition of and the Hölder inequality:
Since by equation (20), we have that . Hence, by the boundedness of in and the fact that is bounded, we have that uniformly in and . Thus, by growth condition (18), we have:
where in the last inequality, we used the definition of and the monotonicity property (47). Using the -homogeneity (19) and the boundedness of the dissipation, we get:
Then, follows since and have zero mean.
The assertion follows as is bounded, by assumption in , and is bounded in by coercivity, as shown in section 6.1 for . □
6.3. Proof of the energy inequality
In the following, we extract further subsequences without relabeling whenever necessary.
Assume to be given a sequence of partitions with and denote by the corresponding incremental solutions. The estimates in section 6.1 and Lemma 6.3 ensure that for every :
Moreover, by Sobolev embedding, we have that weakly in .
As regards the elastic deformation, given by extracting a subsequence possibly depending on , we get:
Note that here we have to implement an exhaustion argument for dealing with the moving domains , exactly as in section 5. Moreover, the total deformation can be proved to fulfill by arguing as in section 5.2.
We aim at passing to the limit in the energy equality (50), which can be rewritten, thanks to the definition of and of , in the weaker form:
Passing to the in the left-hand side of inequality (51), we find by lower semicontinuity:
Let us now study the first dissipation term in equation (51). The calculations for the second one are analogous by Lemma 6.3. Recalling that by definition and that , we have that:
Moreover, up to a subsequence, weakly in by equation (44). It hence remains to identify the limit . To this end, let us define:
By a pointwise-in-time change of variables, we have:
In order to obtain a bound on the gradient , let us consider:
For given , let us show that is not empty for small . Notice that, by Sobolev embedding, in . Hence, for every , there exists such that, for every , we have:
Moreover, since is absolutely continuous in time, for and small, we also have:
Combining these two inequalities, we get:
for and small enough. We can hence fix and trivially extend on .
Then, thanks to the above bounds, we have that weakly in . We have to show that . In fact, we have:
where we have used that weakly in , strongly in , and the fact that is bounded. Since in equation (52) and are arbitrary, we have that and we have hence identified . By weak lower semicontinuity, we thus have that:
Thanks to the boundedness and to the weak lower semicontinuity of the energy and of the dissipation, we can apply Helly’s Selection Principle [28, Theorem B.5.13, p. 611] and find a nondecreasing function such that:
for every . Then, fixing , we have:
Setting , by the regularity of and the boundedness of for almost every in , we have that is equi-integrable. Hence, we can apply the Dunford–Pettis theorem (see, e.g., [28, Theorem B.3.8, p. 598]) to find a subsequence such that:
Furthermore, thanks to the boundedness of the energy and the dissipation, we are able to find further -dependent subsequences such that:
and, by regularity of , that:
In conclusion, passing to the in the left-hand side and to the limit in the right-hand side of equation (51), we retrieve energy inequality (23).
6.4. Proof of the semistability condition
Fix now and recall that in .
By minimality of the incremental solution, we have:
for every with . Let be given. We want to show that one can choose with in such a way that:
Since , we have that and is a Sobolev extension domain. Hence, there exists a linear and bounded extension operator →. We thus define as the restriction to of the extension , namely,
In the following, we just concentrate our attention on the stored elastic energy part, since the treatment of the loading term is immediate. We write:
By the growth condition (14) on and the fact that on the set we have , which is uniformly bounded in , we find:
Since the measure of the set vanishes as goes to by the uniform convergence of to , we have:
We can hence pass to the in inequality (55) as and obtain equation (54), which is nothing but the semistability (24).
7. Linearization: Proof of Theorem 4.2
We first prove in section 7.1 some coercivity results, uniform with respect to the linearization parameter , which in turn provide a priori estimates on the sequence of approximable solutions . Then, we check in section 7.2 some - inequalities for the energy and the dissipation. Eventually, in section 7.3, we show that the approximable solutions converge, up to subsequences, to solutions of the linearized problem in the sense of Theorem 4.2.
In the following, we use the notation:
for the rescaled energy and dissipation densities.
7.1. Coercivity
We devote this section to the proof of the following.
Lemma 7.1. (Coercivity) For every , it holds:
Notice the bound on the term , which follows from assumption (L4). This bound will play an important role in passing to the limit for .
Proof of Lemma 7.1. With no loss of generality, we can assume
By assumption (L4), we have that almost everywhere in . Using equation (31), we get that , hence:
Since has zero mean by assumption, by applying the Poincaré–Wirtinger inequality and by taking into account the growth condition (29), we get:
Using condition (32) and the fact that is bounded in , we get:
In order to obtain the -bound on , we start by fixing and define , where we recall that . We have:
Taking the infimum over , we get:
We now integrate over and, thanks to assumption (26) and the estimate on , we find:
The classical Rigidity Estimate [45, Theorem 3.1] implies that there exists a constant rotation such that:
We hence have that:
Recalling that on , by Maso et al. [32], (3.14), we also deduce:
In conclusion, we get that:
whence the assertion follows. □
7.2. - inequalities
In order to proceed with the linearization, we need to establish - inequalities. At first, we prove the following lemma on the convergence of the densities.
Lemma 7.2. (Convergence of the densities) Assume conditions (L3), (L6), and (L9). Then, we have:
locally uniformly. Moreover, we have:
Proof. Let be given. Fix and let be the corresponding constant from assumption (28). Then, for sufficiently small , we have that . Hence, by equation (28), we find:
Since is arbitrary, we get local uniform convergence for . For and , proof of convergence is analogous, using the corresponding conditions (30) and (33), respectively.
For the - inequalities (56)–(58), let be such that in . Assume without loss of generality that Then, the inequality follows from local uniform convergence. The same applies to and . □
We are now in the position of proving the - inequalities for the functionals.
Lemma 7.3. (- inequalities) For every , we have:
Proof. Let and assume without loss of generality that .
Thanks to inequality (57) and [15, Lemma 4.2], we immediately handle the stored viscous energy terms as:
The treatment of the stored elastic energy term requires some steps. First, notice that, since , we have that almost everywhere in . Hence, uniformly in and is bounded in by equation (31) as well.
Let us then define the auxiliary tensor as:
so that . Notice that since .
Furthermore,
Hence, is bounded in by interpolation, namely,
We therefore conclude that weakly in .
Define now and
We want to show that weakly in . Let us compute:
Since and weakly in , it remains to show that: weakly in . Notice that since is bounded in and and are bounded in . Moreover, since and are bounded in , then so that weakly in .
Let be such that weakly in , and . By coercivity, we have that (up to a nonrelabeled subsequence) weakly in . We want to identify the limit as . First, notice that:
Indeed, and . Then, the - inequality for the dissipation term follows from equation (58) and Mielke and Stefanelli [15, Lemma 4.2] applied on the domain . □
7.3. Convergence of approximable solutions
Thanks to Lemma 7.1 and the energy inequality (35), we have:
By the Gronwall Lemma [3, Lemma C.2.1, p. 534], this implies that for every .
Concerning , we similarly deduce from Lemma 7.1 that:
so that for every , as well.
Again, by Lemma 7.1, we have for every . This yields:
hence, . Therefore, up to a nonrelabeled subsequence, we find:
for almost every . Notice that, since for every , from assumption (L4) it follows for almost every and for every . In particular, are uniformly bounded. Since by developing the determinant as a third-order polynomial, we get:
Using and for a.e. , we hence conclude that:
for a.e. . By passing to the limit as , this ensures that a.e.
where, at this point, the subsequence above may in general depend on . However, we will see that this is not the case by uniqueness of the limit (see the end of Section 7.3).
The linearized energy inequality (37) follows immediately from the energy inequality (35) at level , thanks to the -inequalities in Lemma 7.3 and to the continuity of .
The linearized semistability condition (38), on the contrary, is more delicate, since it requires passing to the on the right-hand side of the semistability condition (36) by choosing a suitable recovery sequence . In the following, we will drop the indication of the time dependence (note that time is fixed in this statement) and simply denote , and , to simplify notation.
We start by showing that, for all fixed , one can choose a recovery sequence such that:
With no loss of generality, we can assume by density that has the form:
As inequality (36) holds for every such that , i.e., , we can choose:
Notice that we have:
To check inequality (61), we need to show that:
Let us first study the limiting behavior of the arguments of these energy densities. We define , namely,
where we have set . Similarly, we can write by letting:
Notice that by definition of and the fact that , we have:
This implies by interpolation that is also bounded in , hence weakly in . Then, we have:
since is bounded in and strongly in . Moreover, by recalling equation (62), we have that:
Fix now and let be as in assumption (28). Let us define the set:
containing all points where and are small. Notice that:
since and are bounded in . We split the integrals in the left-hand side of equation (63) in the sum of the integrals on the sets and on the complementary sets . Using assumption (28) on the sets , we have:
The first term in the right-hand side above can be treated as follows:
by means of the strong convergence of and the weak convergence of in . On the contrary, the second term in the right-hand side of equation (65) satisfies:
since and are bounded in .
Hence, it remains to show that the integrals in equation (63) on the complements converge to as . In order to do so, let us define:
Since by definition and is locally Lipschitz, we can write:
where we used that is uniformly bounded in . This concludes the proof of inequality (63). The check of linearized semistability (38) then follows as soon as one passes to the limit in the loading terms, which is straightforward.
In particular, we have proved that solves the linear minimization problem:
for given , thanks to equation (38). Hence, the limit is unique and measurable in time, since it is the image of through a linear operator. We also remark that this implies that subsequences in equation (60) can be chosen independently of .
Footnotes
Funding
A.C. and U.S. were supported by the Austrian Science Fund (FWF) through project F65. U.S. and M.K. were partially funded by the FWF-GAČR project I5149 (GAČR 21-06569K), the OeAD-WTZ project CZ09/2023, and the project MŠMT ČR 8J23AT008. U.S. was partially funded by projects I4354 and P32788.
ORCIDs iDs
Martin Kružìk
Ulisse Stefanelli
Statement on data availability
Data sharing is not applicable to this article as no data sets were generated or analyzed during this study.
References
1.
Phan-ThienN.Understanding viscoelasticity: basics of rheology. Advanced texts in Physics. Berlin, Heidelberg: Springer, 2002.
2.
ShawMTMacKnightWJ.Introduction to polymer viscoelasticity. 4th ed.Hoboken, NJ: John Wiley & Sons, 2018.
3.
KruzíkMRoubíčekT.Mathematical methods in continuum mechanics of solids. Interaction of mechanics and mathematics. Cham: Springer, 2019.
4.
LectezASVerronE.Influence of large strain preloads on the viscoelastic response of rubber-like materials under small oscillations. Internat J Non-Linear Mech2016; 81: 1–7.
5.
MeoSBoukamelADebordesO.Analysis of a thermoviscoelastic model in large strain. Comput Struct2002; 80: 2085–2098.
6.
MielkeAOrtnerCŞengülY.An approach to nonlinear viscoelasticity via metric gradient flows. SIAM J Math Anal2014; 46: 1317–1347.
7.
FriedrichMKruzíkM.On the passage from nonlinear to linearized viscoelasticity. SIAM J Math Anal2018; 50: 4426–4456.
8.
KrömerSRoubíčekT.Quasistatic viscoelasticity with self-contact at large strains. J Elast2020; 142: 433–445.
9.
BadalRFriedrichMKruzíkM. Nonlinear and linearized models in thermoviscoelasticity. arXiv:2203.02375.
10.
MielkeARoubíčekT.Thermoviscoelasticity in Kelvin–Voigt rheology at large strains. Arch Ration Mech Anal2020; 238: 1–45.
11.
MielkeARossiRSavaréG.Global existence results for viscoplasticity at finite strain. Arch Ration Mech Anal2018; 227: 423–475.
12.
RögerMSchweizerB.Strain gradient visco-plasticity with dislocation densities contributing to the energy. Math Models Methods Appl Sci2017; 27: 2595–2629.
13.
KruzíkMMelchingDStefanelliU.Quasistatic evolution for dislocation-free finite plasticity. ESAIM Control Optim Calc Var2020; 26: 123.
14.
StefanelliU.Existence for dislocation-free finite plasticity. ESAIM Control Optim Calc Var2019; 25: 21.
15.
MielkeAStefanelliU.Linearized plasticity is the evolutionary -limit of finite plasticity. J Eur Math Soc2013; 15: 923–948.
16.
MielkeARossiRSavaréG.A metric approach to a class of doubly nonlinear evolution equations and applications. Ann Sc Norm Super Pisa Cl Sci2008; 7: 97–169.
17.
MainikAMielkeA.Global existence for rate-independent gradient plasticity at finite strain. J Nonlinear Sci2009; 19: 221–248.
18.
GrandiDStefanelliU.Finite plasticity in . Part II: quasistatic evolution and linearization. SIAM J Math Anal2017; 49: 1356–1384.
19.
MielkeAMüllerS.Lower semicontinuity and existence of minimizers in incremental finite-strain elastoplasticity. Z Angew Math Mech2006; 86: 233–250.
20.
ScalaRStefanelliU.Linearization for finite plasticity under dislocation-density tensor regularization. Contin Mech Thermodyn2021; 33: 179–208.
21.
FabrizioMMorroA.Mathematical problems in linear viscoelasticity. SIAM studies in Applied Mathematics. Philadelphia, PA: Society for Industrial and Applied Mathematics (SIAM), 1992.
22.
VisintinA.Differential models of hysteresis. Applied mathematical sciences. Berlin: Springer, 1994.
23.
LeeE.Elastic-plastic deformation at finite strains. J Appl Mech1969; 36: 1–6.
24.
HauptPLionA.On finite linear viscoelasticity of incompressible isotropic materials. Acta Mech2002; 159: 87–124.
MielkeARoubíčekT.Rate-independent systems: theory and application. Applied Mathematical Sciences. New York: Springer, 2015.
29.
MasoGDLazzaroniG.Quasistatic crack growth in finite elasticity with non-interpenetration. Ann Inst H Poincaré C Anal Non Linéaire2010; 27: 257–290.
30.
AmbrosioLGigliNSavaréG.Gradient flows in metric spaces and in the space of probability measures. Lectures in Mathematics ETH Zürich. Basel: Birkhäuser, 2005.
31.
MielkeARoubíčekTStefanelliU.-limits and relaxations for rate-independent evolutionary problems. Calc Var Partial Differential Equations2008; 31: 387–416.
32.
MasoGDNegriMPercivaleD.Linearized elasticity as -limit of finite elasticity. Set Valued Anal2002; 10: 165–183.
33.
JesenkoMSchmidtB.Geometric linearization of theories for incompressible elastic materials and applications. Math Models Methods Appl Sci2021; 31(4): 829–860.
34.
MaininiMPercivaleD.Variational linearization of pure traction problems in incompressible elasticity. Z Angew Math Phys2020; 71(5): 146.
35.
MaininiMPercivaleD.Linearization of elasticity models for incompressible materials. Z Angew Math Phys2022; 73(4): 132.
36.
FonsecaIGangboW.Local invertibility of Sobolev functions. SIAM J Math Anal1995; 26: 280–304.
37.
CiarletPGNečasJ.Injectivity and self-contact in nonlinear elasticity. Arch Rational Mech Anal1987; 97: 171–188.
38.
HenclSKoskelaP.Lectures on mappings of finite distortion. Lecture notes in Mathematics. Cham: Springer, 2014.
39.
GrandiDKruzíkMMaininiE, et al. A phase-field approach to Eulerian interfacial energies. Arch Ration Mech Anal2019; 234: 351–373.
40.
JonesPW.Quasiconformal mappings and extendability of functions in Sobolev spaces. Acta Math1992; 88: 71–88.
41.
RoubíčekT.Nonlinear partial differential equations with applications. 2nd ed.Basel: Birkhäuser, 2013.
42.
MielkeA.Finite elastoplasticity, lie groups and geodesics on SL(d). In: NewtonPWeinsteinAHolmesPJ (eds) Geometry, dynamics, and mechanics. Springer-Verlag, 2002, pp. 61–90.
43.
MielkeA.Energetic formulation of multiplicative elasto-plasticity using dissipation distances. Cont Mech Thermodyn2003; 15: 351–382.
44.
AntmanS.Physically unacceptable viscous stresses. Z Angew Math Phys1998; 49: 980–988.
45.
FrieseckeGJamesRDMüllerS.A theorem on geometric rigidity and the derivation of nonlinear plate theory from three-dimensional elasticity. Comm Pure Appl Math2002; 55: 1461–1506.