
Abstract
In continuum mechanics, one regularly encounters higher-order tensors that require tensorial bases for theoretical or numerical calculations. By using results from
1. Introduction
Continuum mechanics deals with tensorial quantities in all subareas, i.e., kinematics, balance equations, and constitutive theory. The tensorial quanties necessitate a higher-order tensor algebra; however, matrix–vector formulations are more accessible both numerically and didactically.
Depicting higher-order tensors as vectors is as simple as picking a set of higher-order basis tensors, but the choice is not obvious. The oldest and most common approach dates back to Voigt [1]. The Voigt notation renders symmetric second-order tensors as six-dimensional component vectors by defining six orthogonal second-order basis tensors, not all of which are normalized. Therefore, co- and contravariant tensors need to be distinguished, leading to different notations for stress and strain tensors. Although this non-normalized basis requires special care [2], it is commonly used in commercial computer codes such as Abaqus, Ansys, and LS-DYNA.
The Voigt basis can be normalized, resulting in a factor of
While Voigt’s original decomposition into normal and shear tensors derives naturally from the standard
Separately from stress and strain bases, texture description has undergone a number of evolutions. Roe [8] and Bunge [9] are generally credited with texture coefficient descriptions of the orientation distribution function based on spherical harmonics series. These scalar coefficients motivated a coordinate-independent tensorial depiction, introduced by Adams et al. [10]. In actual calculation, these tensorial descriptions still necessitate a choice of basis tensors [11]. Man and Du [12] recently proposed an orthonormal basis of harmonic tensor spaces which uses results from complexified tensor algebra.
In this work, we define a harmonic basis convention for the space of real three-dimensional vectors and related tensor spaces of various symmetries. Section 2 recapitulates relevant parts of the representation theory of
2. Constructing harmonic bases
2.1. The rotation group
We recapitulate a few concepts from the representation theory of groups with a particular focus on the rotation group

In other words, the action of

After algebraic manipulation, we find the

where we call

The eigentensors

If an invariant subspace cannot be decomposed further into smaller invariant subspaces, we call it a harmonic subspace. Correspondingly, the decomposition into harmonic subspaces is known in continuum mechanics as the harmonic decomposition of
Using these concepts, we say that a basis of an
2.2. Harmonic bases for deviatoric tensor spaces
By the eigenvalue problem in equation (4), a basis of a deviatoric subspace can be found using deviatoric eigentensors of an arbitrarily chosen rotation
While it is possible to calculate these eigentensors directly, for high-order tensors, it is cumbersome. Instead, one may use the fact that

Just as the action of

Analogously to the Rayleigh power of equation (3), the infinitesimal Rayleigh power is defined as

The following eigentensor calculation scheme is based on the angular momentum operator approach known from quantum mechanics [15]. Using the Levi-Civita or permutation tensor

These momentum operators form a basis of the tensor representation of the action of
As

To calculate other eigentensors based on

This operator maps a given eigentensor

In quantum mechanics, this complexified orthonormal eigentensor basis



These tensors are real]-valued because the eigentensors form complex conjugate pairs

Furthermore, they are orthonormal because the
As the above definition is linear, there exists a transformation matrix

With this particular convention for

Because these deviatoric bases are fully real and orthonormalized, it is not necessary to distinguish between primal and dual bases or co- and contravariant indices.
2.3. Harmonic bases for arbitrary tensor spaces
To compose arbitrary tensor spaces from deviatoric subspaces, we use the harmonic decomposition. Unlike the usual depictions of that decomposition in continuum mechanics, e.g., Boehler et al. [16] or Forte and Vianello [14], we construct the decomposition of higher-order tensor spaces directly from that of lower-order ones. For brevity of notation, we introduce various operations on tensor spaces which can be defined by applying tensorial operations to their respective basis tensors but are nonetheless basis-independent. The dyadic product of tensor spaces contains all linear combinations of pairwise dyadic products of the respective basis tensors, reading

It can be shown that the space being spanned is independent of the precise choice of bases
An analogous definition of products between tensors and tensor spaces leads to element-wise application of the product, e.g.

When writing the sum of two tensor spaces

As the fundamental units of the harmonic decomposition are the deviatoric tensor spaces, we first calculate how the dyadic product of two deviatoric tensor spaces decomposes harmonically. Fundamentally, the space decomposes harmonically into

with one harmonic subspace

while
To calculate

into equation (22), we retrieve

which is an explicit harmonic decomposition of the dyadic product of two deviatoric tensor spaces. The superscripts

Maps between harmonic and deviator subspaces.
To calculate the tensor

which are called Clebsch–Gordan coefficients, see e.g. Griffiths [17]. Here, the indices

The Bra–Ket notation emphasizes the Clebsch–Gordan coefficients being linear maps from component vectors of dimension

The indices without primes are defined as

Because the coefficients and basis tensors in this expression are fully real,
Using the Clebsch–Gordan tensors, the harmonic basis for

with an appropriate enumeration convention

In the general case, we are interested in the harmonic decomposition of an arbitrary tensor space which is constructed as the dyadic product of two other tensor spaces

and

Brevity here causes an imprecision of notation. Even if
The space

We define a

Using the Clebsch–Gordan tensors, we find

The sums can be rearranged with the deviatoric order

With the

Here
Relative to a harmonic basis, an

with the harmonic basis components

it is more clear that the harmonic components
The construction of inclusions from Clebsch–Gordan tensors defined above allows the calculation of a harmonic decomposition from the ground up by repeatedly applying dyadic products. By using the
3. Second-order harmonic bases
3.1. Definition
To calculate the harmonic basis equivalent of the Voigt basis, we harmonically decompose the space of second-order tensors

The harmonic basis of

is harmonic. The traceless part of


We thus arrive at the harmonic decomposition of

and use equation (25) to calculate the harmonic decomposition in the form

The relevant Clebsch–Gordan tensors can be calculated via equation (29) as



Using equation (39), a second-order tensor can therefore be depicted as

Because

To find the basis of





from which









3.2. Application 1: small-strain elasticity
Small-strain elasticity is described by Hooke’s Law,

a linear constitutive material law which links the second-order Cauchy stress
where we denote this symmetrized harmonic basis
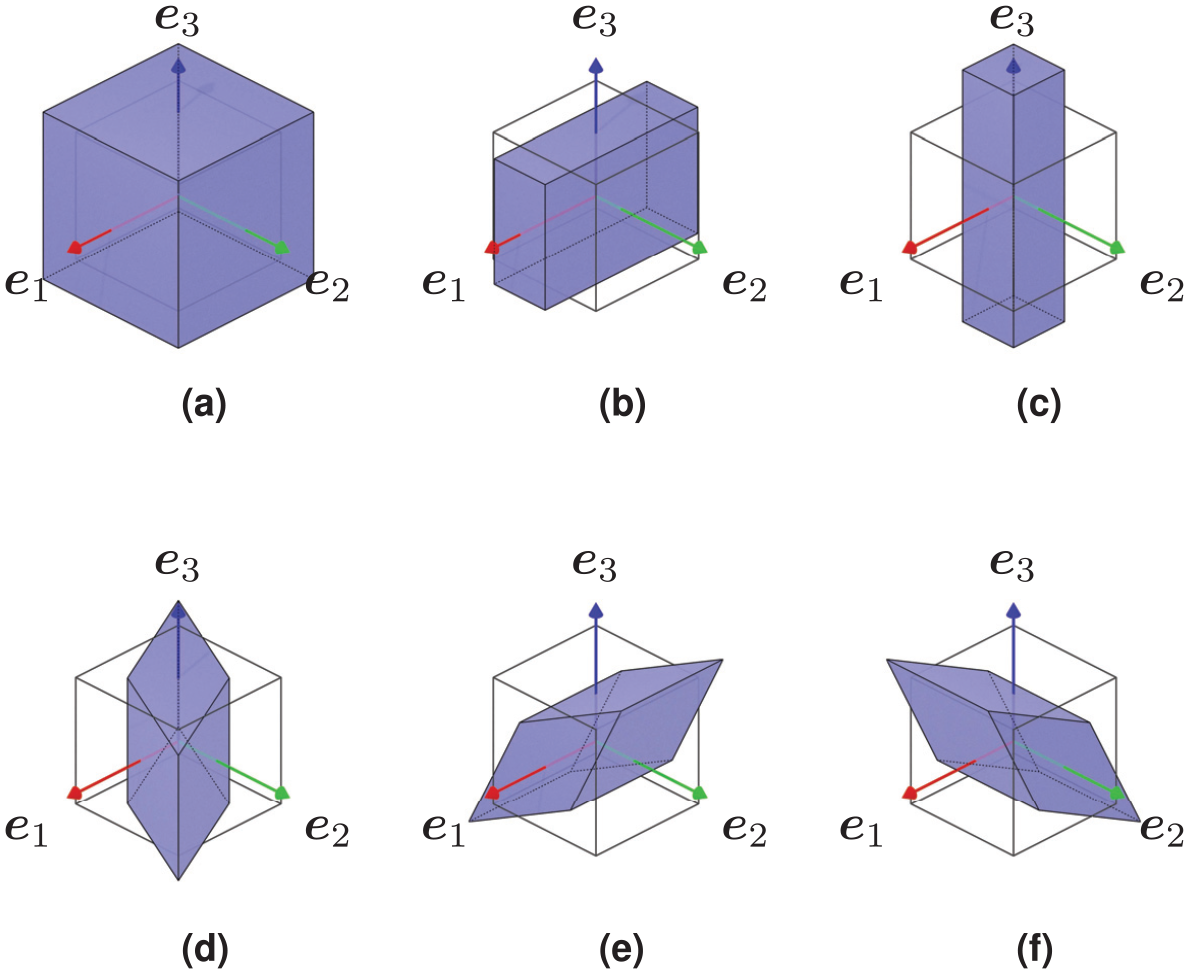
Harmonic second-order basis tensors visualized as elementary strain modes. (a)
When purely deviatoric tensors are considered, the resulting five-dimensional
and [6]
A full discussion of those bases can be found in Manik’s study [18].
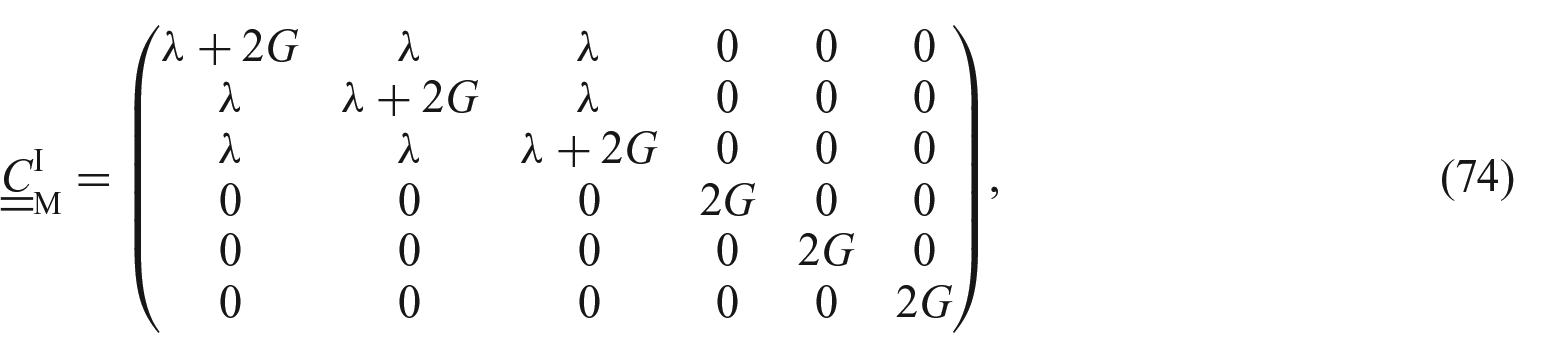
The basis most commonly used in commercial software is the non-normalized basis of Voigt [1]. Also common is its normalized equivalent, the Mandel basis described by e.g. Mandel [3]. Conversions between the harmonic basis and the Mandel basis can be written as

with
For conversions from the non-normalized Voigt basis, rows 3–5 acquire a factor of
We now compare the harmonic and the Mandel basis for depicting the stiffness
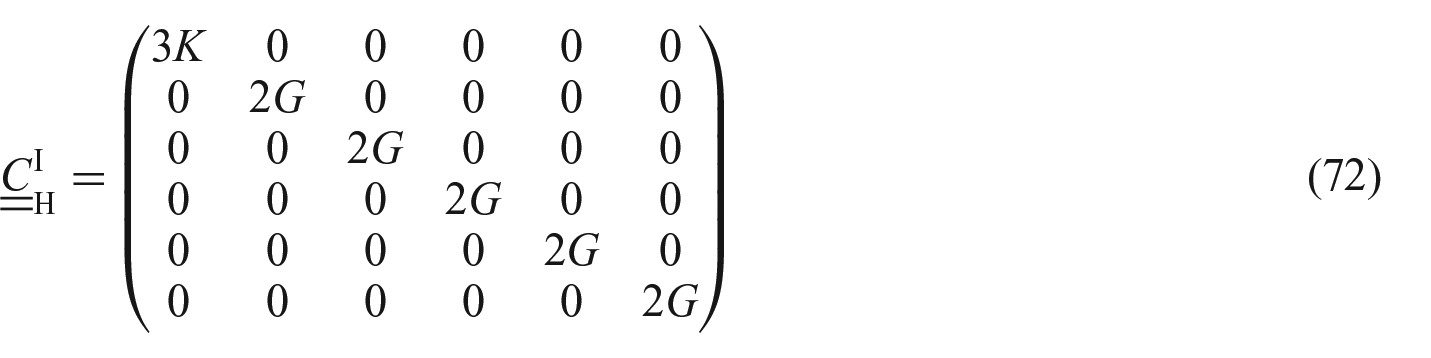

with the compression modulus
with


Diagonal matrices have many numerical advantages to non-diagonal matrices, in particular when inverting

or applying non-linear functions

or in matrix-vector multiplications, which are of complexity order
For crystals aligned with the axes

with



Similarly to the isotropic case, the diagonality of



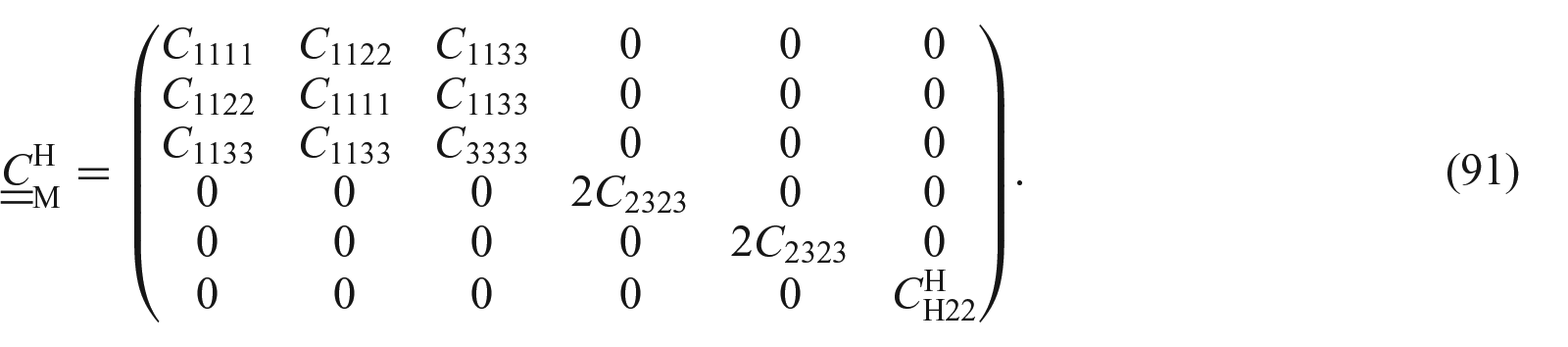
For transversal-isotropic or hexagonal stiffness tensors whose symmetry axis is aligned with
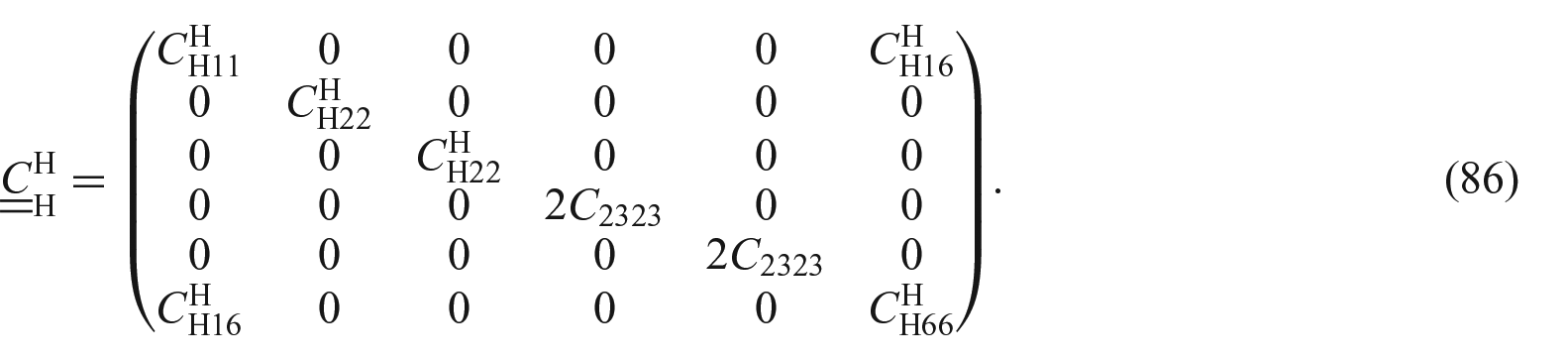
with




Note that
In the harmonic basis, trigonal, tetragonal, and monoclinic stiffnesses are also simplified, as shown in Appendix 2. Orthotropic and fully triclinic stiffnesses are of a similar degree of complexity as in the Mandel notation. We conclude that choosing the harmonic basis instead of the Mandel basis, which is purely a matter of convention, simplifies calculations and representations for a large class of material symmetries.
Anisotropic quantities are not always aligned to the coordinate axes as in the cases above. A non-aligned stiffness tensor

Respective to the harmonic basis,

with

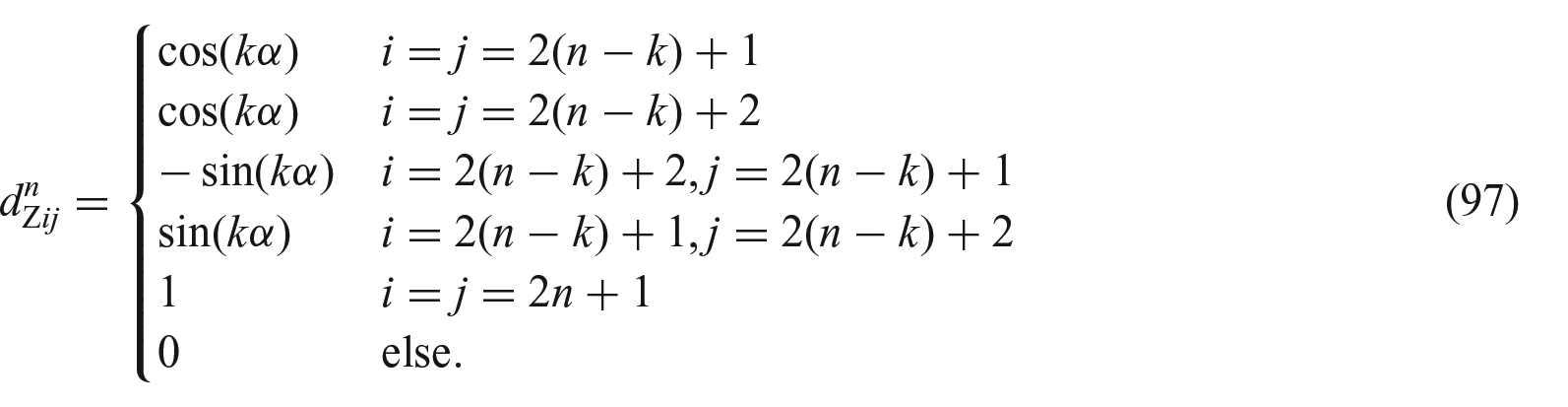
To calculate these harmonic rotation matrices, we begin with deviatoric rotation matrices. The nth order eigentensor basis

After transforming into the deviatoric basis via equation (17),

with
For
For rotations around other axes, the

and

with

and


The Wigner-
The full rotation

Even for the full three-angle rotation, the block matrix structure of
The above discussion is limited to elastic small-strain materials, which are a particularly simple material class. Similar issues of symmetry and anisotropy also arise in kinematically sophisticated approaches such as gradient materials or generalized continua (for general references on these topics, see Gurtin et al. [20] and Neff et al. [21], respectively). These continuum theories involve higher-order tensors which can result in lengthy expressions in the anisotropic case (see, e.g., Lazar et al. [22] and the references therein) for which the harmonic basis offers a concise representation. As the inclusion of gradient materials would go beyond the scope of the manuscript, we will not go into detail here.
3.3. Application 2: computational elastoviscoplasticity
The natural basis as defined by Kocks arose from a context of computational crystal plasticity. In this context, the natural basis is advantageous because it diagonalizes cubic stiffnesses and explicitly splits second-order tensors into spherical and deviatoric parts, as discussed by Kocks et al. [7] and, more recently, Mánik et al. [23]. When implementing crystal plasticity material laws, this spherical-deviatoric split reduces the size of equations systems that need to be solved numerically. As discussed in Section 3.2, the harmonic basis has the same properties. Mánik [18] showed that basis representations with these properties also reduce the numerical effort for calculations involving more general elastoplastic models that are not cubic, particularly if plastic strains conserve volume. This result can be extended beyond associated elastoplasticity by using the generalized standard material (GSM) framework defined by Halphen and Nguyen [24] and Germain et al. [25] in a small- deformation context. A GSM is specified by a free energy density

If plastic strains conserve volume, the plastic strain is fully deviatoric,

and the dual variable of the plastic strain is likewise the deviatoric stress, here written with the deviatoric projector

The dual dissipation potential

The viscoplastic strain rate given by this evolution equation directly depends on the stress and therefore describes rate-dependent, i.e. viscoplastic behaviour. Rate-independent behaviour can be described in the GSM framework as well, but requires a more complex mathematical apparatus involving non-differential dissipation potentials as described by Halphen and quoc Son [26]. For reasons of simplicity, we continue with the rate-dependent form specified above, which we discretize via an implicit Euler approach, yielding

where

by one dimension. Furthermore, the Jacobian

is reducible to a

can be solved via a direct method with computational expense of order
The example material considered here is both anisotropic and generally nonlinear, but simple in the sense of having a small number of internal variables. We expect similar results for materials with hardening, both isotropic and anisotropic. As evidenced by e.g. the existence of the various Kocks-type bases, the approach of modelling incompressible problems in an isochoric parameter space is not a new development. The harmonic basis is useful because transforming to an isochoric parameter space is as simple as dropping the first component. Even more generally, the harmonic basis can be of use whenever a continuum-mechanical problem can be separated into compressive and deviatoric parts.
4. Texture descriptions using the harmonic basis
4.1. Tensorial texture descriptions
The properties of locally anisotropic microstructures generally depend on local orientation, such as grain orientations in a polycrystal. One method of describing such microstructures is the orientation distribution function (ODF), a one-point probability distribution of orientation, which is defined as a probability density on the orientation space

with the normalization property

The ODF is directly linked to anisotropy in various material quantities, such as effective stiffnesses (e.g. Böhlke and Bertram [28]) and plasticity (e.g. Man and Huang [29]). The calculation of effective material quantities from the ODF generally requires additional micromechanical assumptions.
We assume the ODF to be square-integrable. By choosing a basis of the space of square-integrable functions, the ODF can be described with a series of coefficients relative to this basis, cf. Bunge [9]. A coordinate-independent series expansion is possible by using tensorial texture coefficients coefficients (Adams et al. [10]). Lobos Fernández and Böhlke [11] define these tensors as general deviatoric basis tensors

The series description of the ODF follows as

In micromechanics, a common expression is the expectation value of an orientation-dependent tensor

After rearranging the integral and using the isotropy of the inclusion tensors, equation (114) can be used to arrive at

We note that the harmonic basis components
4.2. Application 3: orientation averages of elasticity tensors
As an example, we calculate the orientation average of a major and minor symmetric fourth-order tensor

with appropriate tensors


such that

and

for all

in which case
Forte and Vianello [14] state that fourth-order harmonic decompositions are not unique, since tensorial constants of the same order, such as

with







with the last term being the eighth-order identity on





According to equation (117), the orientation average of

with
In the general anisotropic case, the

where



As noted by Böhlke and Bertram [28],
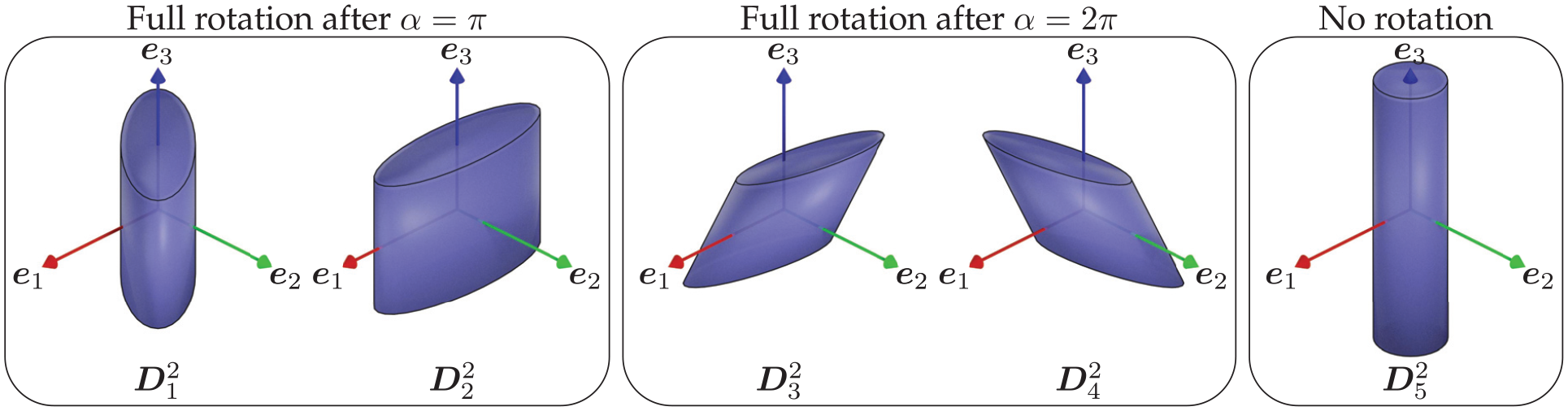
4.3. Application 4: fiber orientation distributions
The results found here are equivalently true for fiber orientation modeling. In the fiber orientation community, textures are modeled over the sphere

To use our results, we transform the integration domain to

Because

The basis tensors are given by

where the norm resolves to

The harmonic components

Applying a rotation integral weighted with the ODF


The constants

Due to the normalization condition equation (113), the zeroth-order third-kind orientation tensor is always
4.4. Computational effort of tensor rotations
In practice, texture analysis involves large numbers of rotations of high-order tensors. We therefore investigate the computational efficiency of rotations. Given a generally anisotropic

where

Therefore, an upper bound for the total number of floating-point multiplications is

Notably, these are fewer than
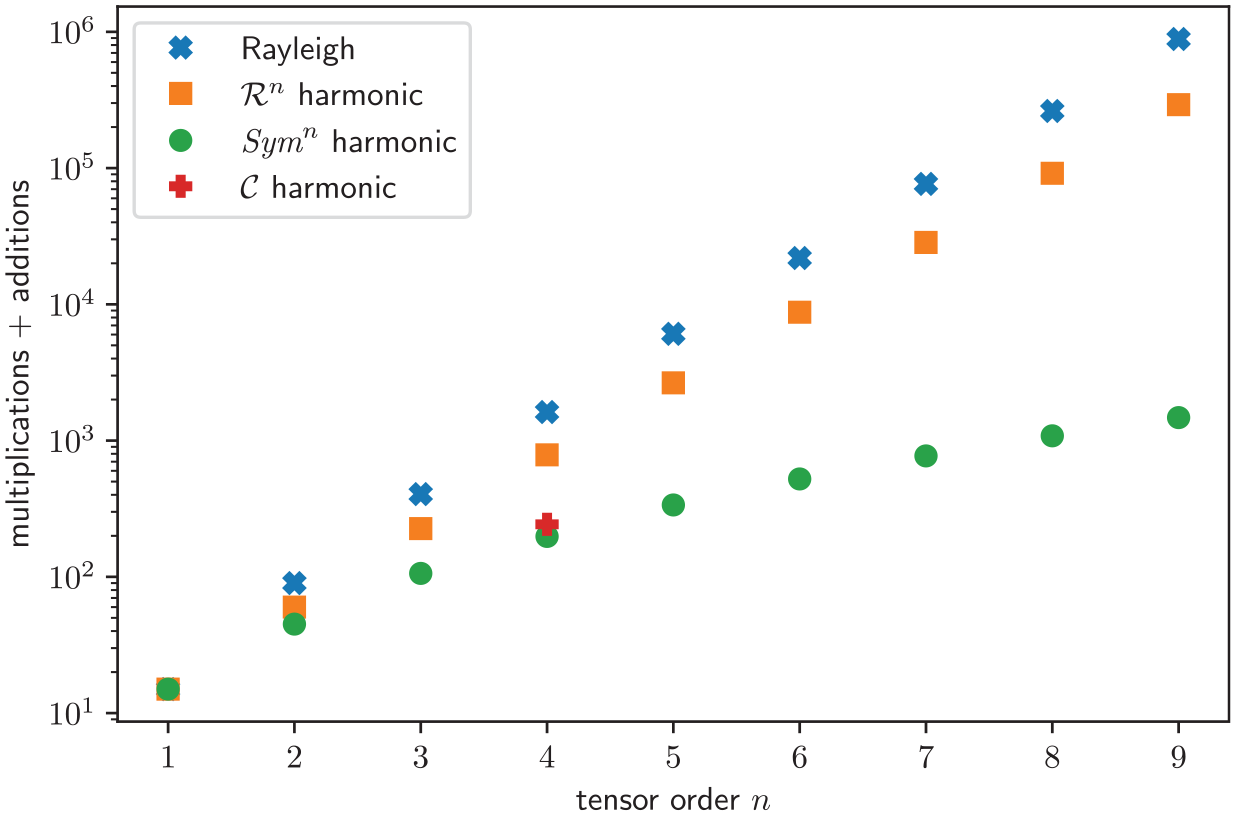
Number of additions and multiplications involved in rotations of
If the rotations in question are always applied to a given reference state, as is common for orientations of single crystals in a polycrystal, it is also possible to implement material symmetries to reduce the computational effort further. As is well known in the texture analysis community, material symmetries reduce the number of tensorial texture coefficients involved in a texture description [11]. Equivalently, one might say that material symmetries reduce the

Applying
For example, fiber orientation tensors are both fully index symmetric and transversal isotropic. In the reference orientation aligned with

Correspondingly, rotating a transversally isotropic

multiplications. We summarize that rotating high-order tensors in the harmonic basis is computationally efficient compared to a naive Rayleigh product implementation in the general case, and increasingly specialized rotation implementations can be found for both index- and material symmetries, further increasing the efficiency.
5. Conclusion
This work proposes a novel convention and calculation scheme for harmonic bases which expands and unifies existing schemes in material modelling and texture quantification. The new convention
simplifies theoretical approaches in crystallography and micromechanics by being aligned to the eigendecompositions of common material symmetries
reduces computational effort in numerical approaches by allowing a problem-specific choice of basis which, compared to commonly used basis conventions, exploits material symmetry of tensorial quantities to reduce the dimension of equation systems and exploit sparsity of various matrices.
These improvements are accomplished by defining a basis scheme which decomposes tensor spaces into harmonic subspaces. Mathematically, the representation theory of
For small deformation material modeling, we derived a harmonic basis of symmetric second-order tensors, which is equivalent to orthonormalized Kocks-type bases. We showed that the basis tensors correspond to elementary strain modes. In linear elasticity theory, stiffness tensors of different material symmetry are efficiently represented in the harmonic basis (Application 1). In addition, we show that for a large set of phenomenological incompressible plasticity models, the time integration problem can also be efficiently formulated and solved in a harmonic basis (Application 2).
In the context of texture analysis, the harmonic basis derived here is a fully real version of the basis recently proposed by Man and Du [12], removing the need for complexified tensor algebra. The deviatoric bases parametrize tensorial texture coefficients in an efficient manner. In addition, the harmonic extension of arbitrary tensor spaces clarifies the relationship between texture coefficients and orientation averages (Application 3). For example, specifying stiffness tensors in a 21-dimensional harmonic basis considerably simplifies the computation of orientation averages if texture coefficients are known. For the description of fiber orientation distributions, e.g., in fiber-reinforced polymers, the harmonic basis tensors are closely related to established fabric or fiber tensors of third kind, and therefore help in describing the orientation distribution (Application 4). Finally, we show how the numerical effort of rotating tensors can be reduced by proper subspace-representations using the harmonic basis.
The harmonic basis formalism described in this paper can be applied to tensors of arbitrary order and symmetry. Correspondingly, harmonic bases can be used in every tensor-based theory to find tensorial bases which are tailored to specific theories and applications.
A Python implementation of the harmonic basis convention defined in this work is available at www.itm.kit.edu/harmonic-bases.
Footnotes
Appendix 1
Appendix 2
Appendix 3
Acknowledgements
The support by the German Research Foundation (DFG) is gratefully acknowledged. In addition, M. Krause wishes to thank A. Krause for his invaluable support in navigating group representation theory.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The research documented in this paper was funded (BO 1466/14-1) by the German Research Foundation (DFG) as part of project 512640977, ‘Evaluation of non-linear