
Abstract
The proposed revisit to a classical problem in fluid–structure interaction is due to an interest in the analysis of the narrow resonances corresponding to a low-frequency fluid-borne wave, inspired by modeling and design of metamaterials. In this case, numerical implementations would greatly benefit from preliminary asymptotic predictions. The normal incidence of an acoustic wave is studied for a circular cylindrical shell governed by plane strain equations in elasticity. A novel high-order asymptotic procedure is established considering for the first time all the peculiarities of the low-frequency behavior of a thin fluid-loaded cylinder. The obtained results are exposed in the form suggested by the Resonance Scattering Theory. It is shown that the pressure scattered by rigid cylinder is the best choice for a background component. Simple explicit formulae for resonant frequencies, amplitudes, and widths are presented. They support various important observations, including comparison between widths and the error of the asymptotic expansion for frequencies.
1. Introduction
Acoustic wave scattering by a thin elastic cylindrical shell is a classical problem in the field of underwater acoustics (e.g., see [1–4]). It has an exact solution in Fourier series involving Bessel functions (e.g., see [5]), which, however, is not always ideally suited not only for analytical inspection but also for numerical implementation. The major challenge consists of the evaluation of very narrow low-frequency scattering resonances (see [6,7]), which can easily be missed in computations without a preliminary asymptotic insight.
At the same time, asymptotic treatment of the problem in question is mainly restricted to higher frequencies, when the effect of shell curvature is not that crucial and reduced plate-like models may be considered (see [2,8]) and references therein. Moreover, such models are not originally oriented to coupled problems in fluid–structure interaction formally adopting the results earlier obtained for plates under prescribed mechanical loads. The observations above strongly motivate a revisit to a well-known formulation.
It is worth noting that the general asymptotic procedure underlying the three-dimensional (3D) to two-dimensional (2D) dimension reduction for thin elastic shells [2,9] fails for low-frequency vibrations of a hollow cylinder, since its mid-surface virtually does not experience extension and shear (see also [10,11]). In this case, an appropriate framework has been established only not long ago (see [12,13]).
We also remark that the asymptotic developments in the cited papers [12,13] considering a shell with traction-free faces cannot be readily extended to a fluid-loaded shell. In addition to what has been already mentioned, we reiterate that the effect of fluid results in more sophisticated boundary conditions along a fluid–solid interface than Neumann ones corresponding to a shell not contacting with fluid. The former support the so-called fluid-borne wave [6], which has recently been studied in detail for low-frequency bending of a fluid-loaded plate in Kaplunov et al. [14]. In particular, it has been shown that at leading order this wave is supported by plate stiffness and fluid mass; in doing so, the plate mass appears only at higher order. Thus, it is a genuine fluid-borne phenomenon.
Last several years, there is a fresh interest in the low-frequency domain, inspired by metamaterial modeling, including the analysis of most useful band gaps for periodic arrays of thin cylinders immersed into acoustic media (see [15–17]). This seems to be another motivation for revisiting a famous problem in fluid–structure interaction.
In this paper, we consider resonance scattering at normal incidence. The shell is governed by plain strain equations in linear isotropic elasticity. Several low-frequency circumferential modes are studied. A high-order asymptotic scheme is developed. It is mostly in line with that for a free shell [13] but operates with a scaling specific for a fluid-borne wave, analogous to the above-mentioned problem for a fluid-loaded flat plate [14].
The obtained explicit formulae are interpreted using the Resonance Scattering Theory [1,3], including simple expressions for resonance frequencies, widths, and amplitudes. Both the transverse shell displacement and scattered fluid pressure are analyzed. Numerical examples are presented for a thin aluminum shell immersed in water. It is also remarkable that the error of the refined two-term expansion for frequencies is still greater than the widths of related resonances. Nevertheless, the derived approximations provide a better idea of low-frequency scattering by a cylindrical shell.
2. Statement of the problem
Consider a plane problem for a circular cylindrical shell of thickness
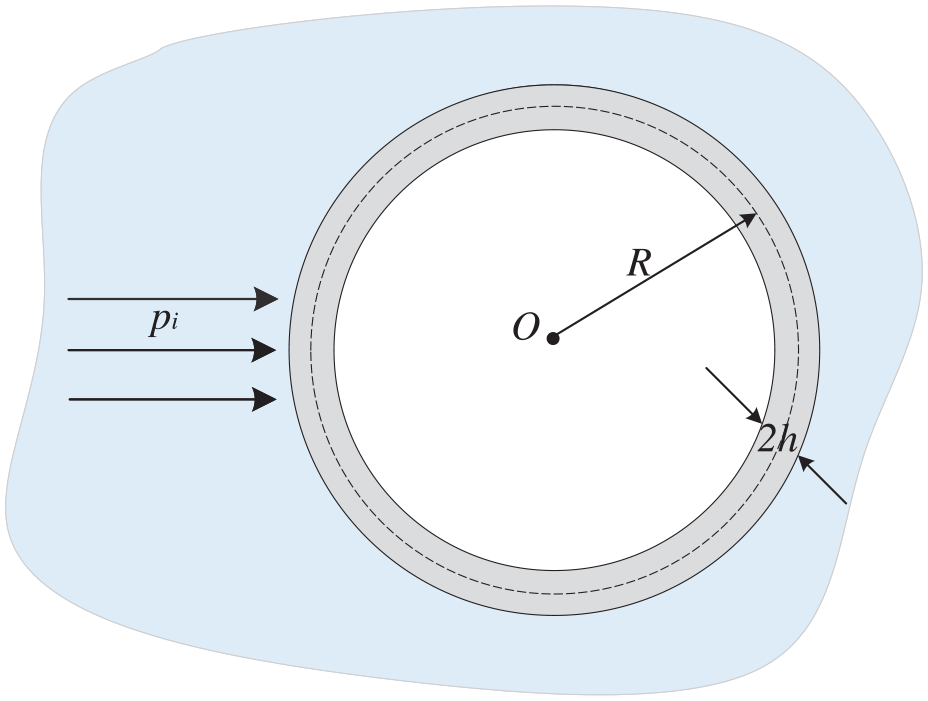
Thin elastic shell immersed in fluid.
The 2D equations in linear elasticity governing time-harmonic shell motion (below, the factor

and

where


and

here,
The fluid is governed by the 2D Helmholtz equation:

where

The fluid pressure is the sum of a prescribed incident component

In this paper, we concentrate on the analysis of the

where
The fluid–structure interaction along the interface

and

where

In what follows, we focus on the first few shell resonances
3. Scaling
First, we define the dimensionless frequency in accordance with the assumption made in the previous section as:

It is worth mentioning that for a free shell, i.e., one not in contact with a fluid, we have
Then, we present the displacement and stress components,


and

where

and

with
Substituting expression (8) into the impenetrability condition (10), taking into account the second of the contact conditions (9) and using formulae (13)–(15), the remaining two contact conditions may be combined into a single one at

where

with:

In the formulae above,
Let us, now, introduce the dimensionless quantities similar to those for a free shell, e.g., see Ege et al. [13], as:

and

together with:

and also:

In addition, we set:

where

and

where
The boundary conditions given by equations (9) and (11), now, become:

and

The impenetrability condition (18) takes the form:

Inserting scalings (21) and (22) in the equations of motion (1) and (2) and the constitutive relations (3)–(5), we have:


and



In what follows, all quantities marked with an asterisk are expanded in asymptotic series as:

taking into account
4. Asymptotic derivation
First, integrating equations (34) and (35) with respect to the thickness coordinate

where
Next, integrating equations (31) and (32), we have:

Using the homogeneous boundary conditions (28) and (30), taking the form

It is clear that the frequency parameter does not appear in the relations above; therefore, we need to proceed with the next-order approximation. Then, we consider equations (34) and (35) at the first order inserting into the latter the derived expressions (33). Next, integrating along the thickness, we obtain:

where we also employ the relation (39).
Now, revisiting of equation (33), using relations (40)2, (40)3, and also equation (37), results in:

As a result, expressions (38) may be rewritten as:

In a similar manner, we deduce from equation (31), integrating in the thickness variable and adopting equations (41) and (42), together with the appropriate boundary condition at

and

Finally, integrating equation (32) in

Here, we adapt the impenetrability condition (30) which, at first order, takes the form:

where

and

Equation (45), at

On comparing equations (44) and (49), we finally obtain the leading order vertical displacement given by:

where the coefficients

Similarly, at the second order, we start by integrating equations (34) and (35) in

Next, integration of equation (33), taking into account equations (37), (40), (42)2, and (52) leads to:

Substituting the last formula back into equation (33), we get:

This expression allows us to rewrite formulae (43) and (45) as:

and

Then, we derive from equations (31) and (32), respectively:

and

Here, we apply the boundary conditions (28) together with equation (30) which, at the second order, becomes:

with:

As a result, equation (59), using equations (46) and (60), may be rewritten as:

Finally, comparing equations (57) and (58), we obtain:

where the coefficients

5. Resonant scattering analysis
Let us define

where

with
In the vicinity of

where

with

Let us also determine the unknown coefficient

Employing equations (22)3–(25), (29), (46), and using the fact that

Substituting equations (19), (20), (24), (25), and (46) into the last formula, we arrive at:

with:

and

where we make use of equation (50) in the last relation. Here,
We may easily derive the leading order terms in equations (72) and (73) (see Abramowitz and Stegun [18]), which are evaluated as:

and

Again, in the vicinity

with the amplitude

Figure 2 demonstrates the resonant behavior of an aluminum cylinder submerged in water for the displacement
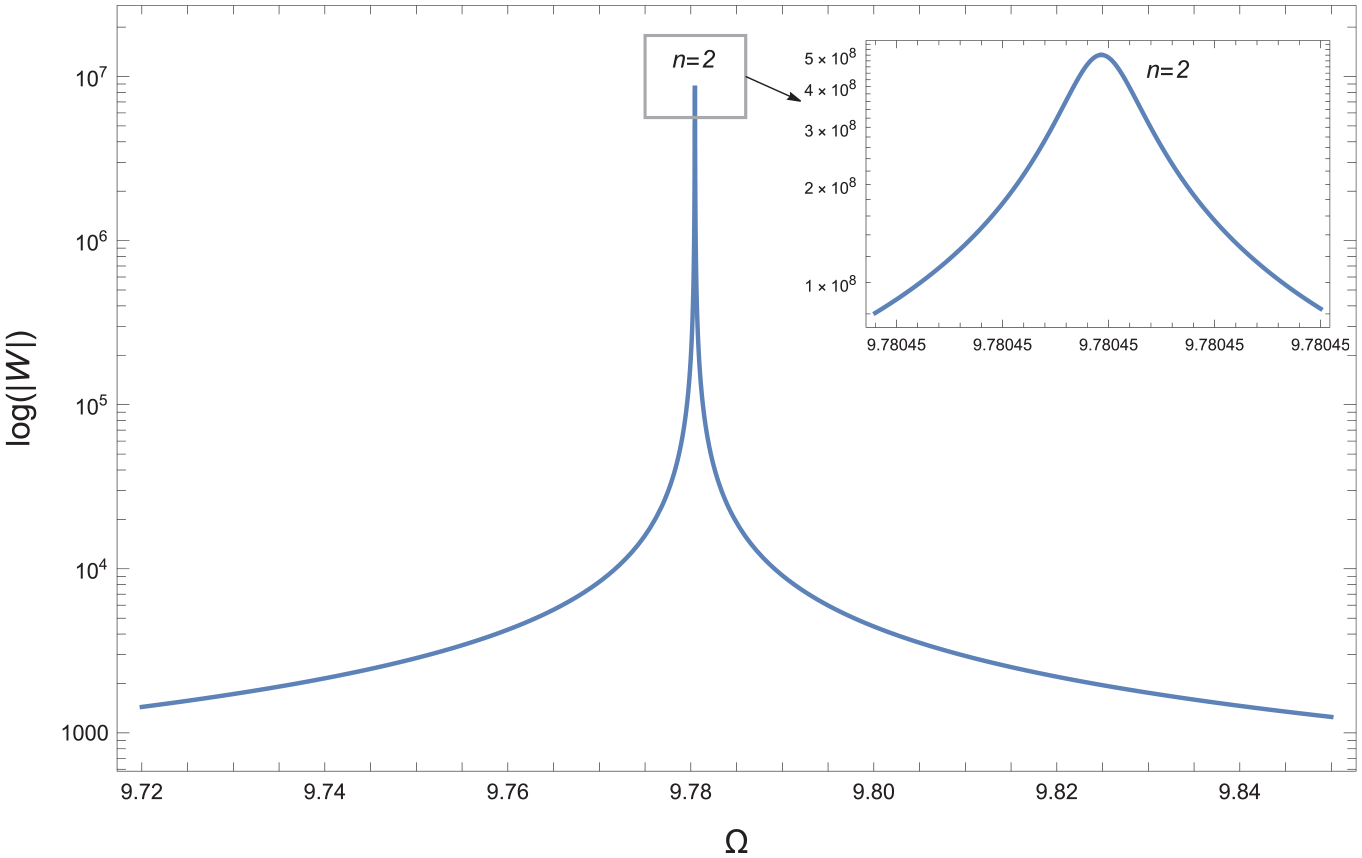
Displacement (66) for
Numerical values of resonance scattering characteristics for

In Figure 3, we present a similar curve for the resonance component of the scattered pressure starting from equation (76) with equations (77) and (67). In this case, the estimation (77) indicates the growth of the amplitude
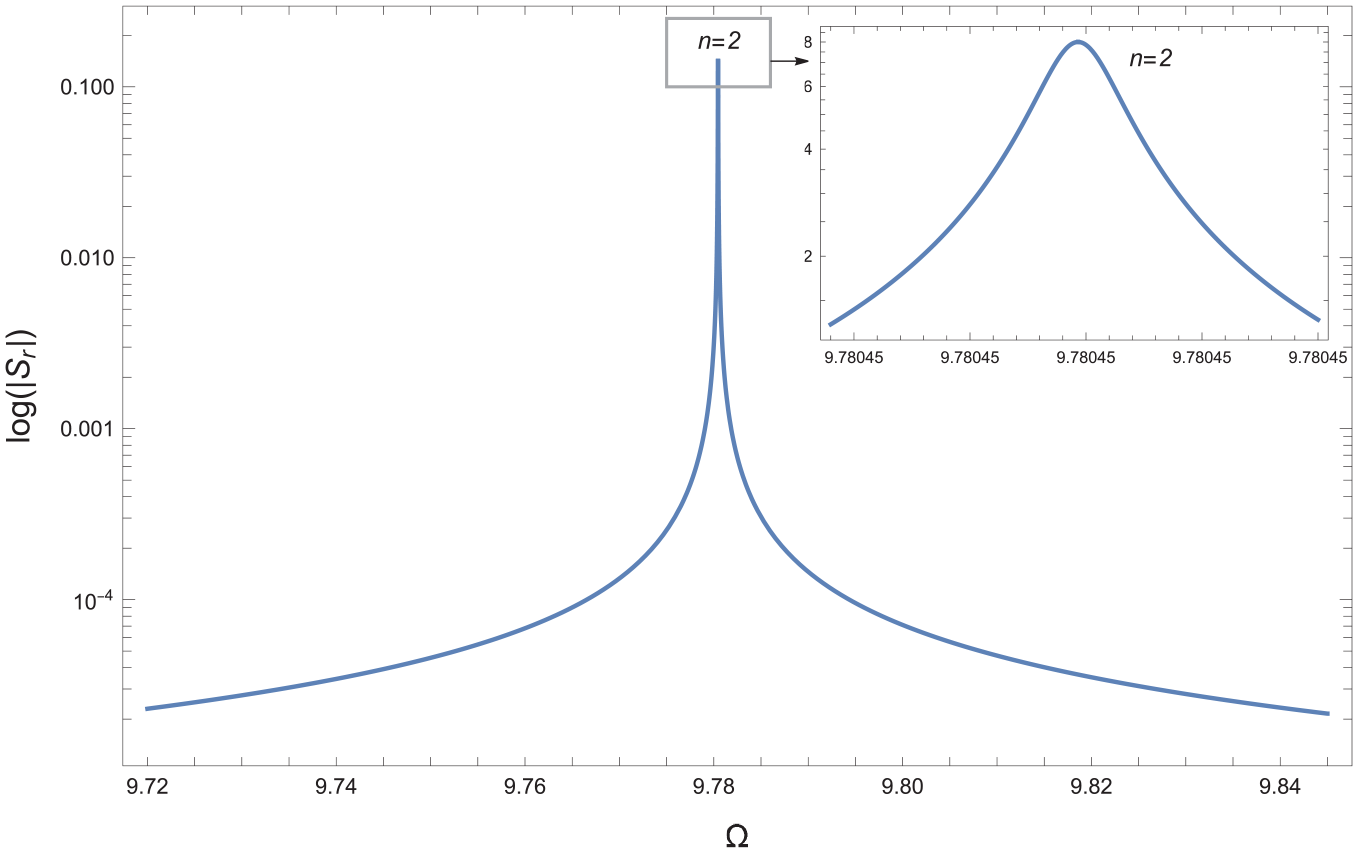
Resonance component (76) for
The formulae (67) and (48) as well as the relevant column in Table 1 show that the widths of the observed resonances are
6. Conclusion
The problem of acoustic scattering by a circular cylindrical shell at normal incidence is revisited assuming that the shell motion is governed by the “exact” plane strain equation in linear elasticity. A high-order asymptotic scheme, oriented to low-frequency motion of a thin fluid-loaded shell over the range (12), is developed. The resonances of a fluid-borne wave are investigated according to the Resonance Scattering Theory [1]. It is demonstrated that a background component has to be taken as the pressure scattered by a rigid cylinder (see equation (72)). Explicit formulae are obtained for resonant frequencies, amplitudes, and widths (see equations (65), (67), (68), and (77)).
These formulae allow evaluation of remarkably narrow resonant peaks (see Figures 2 and 3 along with the Table 1). Numerical analysis of such peaks without a preliminary asymptotic insight is highly problematic. Indeed, their width (equations (66) and (76)) is significantly less than the error of the asymptotic expansion (65) (see Veksler [19]). Certainly, the derivation of more accurate expansions would be very time-consuming.
Apparently, a more realistic prediction for the analyzed peaks might be established by taking into account structural damping. The latter also seems to be useful for numerical experiments, providing an initial approximation even for a purely elastic scenario. In this case, it would be natural to begin with inserting a damping coefficient into the exact elastic solution.