
Abstract
In this paper, we propose a mechanical model for a game of tug of war (rope pulling). We focus on a game opposing two players, modelling each player’s body as a structure composed of straight rods that can be actuated in three different ways to generate a pulling force. We first examine the static problem of two opponents being in a deadlock configuration of mechanical equilibrium; here we show that this situation is essentially governed by the ratio of masses of the players, with the heavier player having a strong advantage. We then turn to the dynamic problem and model the response of the system to an abrupt change in activation by one of the players. In this case, the system exhibits a nontrivial response; in particular, we compare a sudden pulling and a sudden “letting up,” and demonstrate the existence of regimes in which the lighter player can momentarily take the advantage.
“The final lines are not mine: they come from an experiment on soft matter, after Boudin […]. An English translation might run like this:
Have fun on sea and land
Unhappy it is to become famous
Riches, honors, false glitters of this world
All is but soap bubbles”
1. Introduction
Tug of war (also known as tug o’ war, tug war, rope war, rope pulling, or tugging war) refers to “an athletic contest between two teams who haul at the opposite ends of a rope, each trying to drag the other over a line marked between them” [1]. Tug of war has a rich history and unclear origins and is arguably one of the oldest known games in humanity, played for ritual, political, military, commemorative, sportive, or recreational (1) purposes in various cultures [2–4]. Its most ancient representations can be traced back to as early as the Bronze Age 1 [5], and historical and mythological variants can be found galore, for example, in ancient Greece [6], Cambodia, 2 China [4], India, 3 Afghanistan, Japan, Korea, South America, Europe, and Togo; as well as in Inuit traditions [7] or Scandinavian legends [8]. Rope pulling is now a codified sport [9], played in all countries in the world by amateur and professional athletes.
The game’s iconic power has been exemplified in popular culture, with reference in shows such as Squid Game, a Korean dramatic series from 2021. In a graphic metaphor for social Darwinism [13, 14], hundreds of financially cornered players compete for money in various mortal games, including a tug of war in which the weakest team is liquidated by being dragged towards a precipice. Luckily, in reality, tug of war is generally played in more companionable conditions; nonetheless, it is a physically intense and technically challenging sport that may involve huge mechanical forces. It is thus not entirely surprising that several more or less serious tug-of-war accidents have been reported [15–17], such as the dramatic Taipei incident of 1997. In a mammoth rope-pulling contest commemorating Retrocession Day, and featuring a staggering 1,600 participants, the inadequate, 2-inch thick nylon cord snapped under overwhelming tension, unleashing a devastating amount of kinetic energy. The incident resulted in injuries to 42 individuals, with two having an arm torn off, 4 and plunged the municipality into serious political-mediatic turmoil. Two years earlier, one of the worst disasters in tug of war history occurred in Germany, when 650 Boy Scouts attempted to win a place in the Guinness Book of Records. The unsuited, thumb-thick rope chosen for the event inevitably snapped, killing two young boys, and causing injuries to 102 participants. 5 Several other cases have been reported where rope snapping and/or unsafe gripping resulted in various injuries such as limb severing. 6 Notwithstanding these rare but shocking incidents, mostly caused by amateurish negligence and irresponsible underestimation of the forces at play, tug of war is overall safe, as long as the players use the right equipment and follow the rules and safety guidelines [9].
From a mechanical perspective, tug of war presents an intriguing system, seemingly simple in its complexion—forces are applied to opposing ends of a rope—but with significant complexity in its execution: the configuration of each player, many different muscle groups potentially generating forces in different ways, timing, footing, stabilisation after slipping, and so on, all play a role in the outcome of a game. In practice, teams use strategies such as the drop-step, heel-toe, sitting, bracing, quick pull, and counterbalance techniques to establish a robust foundation, emphasise footwork, maximise strength, create sudden bursts of power, and strategically position team members. These techniques contribute to the dynamic nature of tug-of-war, enabling teams to employ diverse tactics based on their strengths and objectives. In this paper, we mathematically address a simple question: How to win a game of tug of war?
Biomechanical [18–22] and mathematical [4, 23–25] analyses of tug of war have been proposed, often focusing on the biomechanics of one player pulling on a fixed rope. Here, the focus is rather on the mechanics and dynamics of the game itself, that is, the competition between several opponents. In particular, we attempt to determine the mechanical determinants of a victory (e.g. posture, body characteristics, and strength). Therefore, we propose a mathematical model for a tug of war between two players, simple enough to enable mathematical analysis but with enough complexity and degrees of activation freedom to mimic potential strategies within a real game. We first study the static case, namely a deadlocked situation of mechanical equilibrium, and we compare each player’s propensity to slip as a function of three distinct modes of pulling activation. In that case, we show that the outcome of the game is almost fully dictated by player weight, more than any other physical characteristic. We then turn to the dynamic case, in which inertial effects induced by a sudden change in activation create a rich dynamic structure, and where a lighter player may be momentarily able to make the heavier one slip or stumble.
2. Model
The setup for our model is shown schematically in Figure 2. We consider a two-player game, with the players situated in the
(a) A group of children playing tug of war. Prior to the 20th century, the game was commonly known in the anglophone world as the game of French and English [10, 11], likely owing to the tense historical ties between France and Britain. Drawing reproduced from Williams [10] (public domain). (b) Four little mice in a fierce tug of war. Image adapted from McMillen and Goriely [12] with presumed courtesy from Alain Goriely.
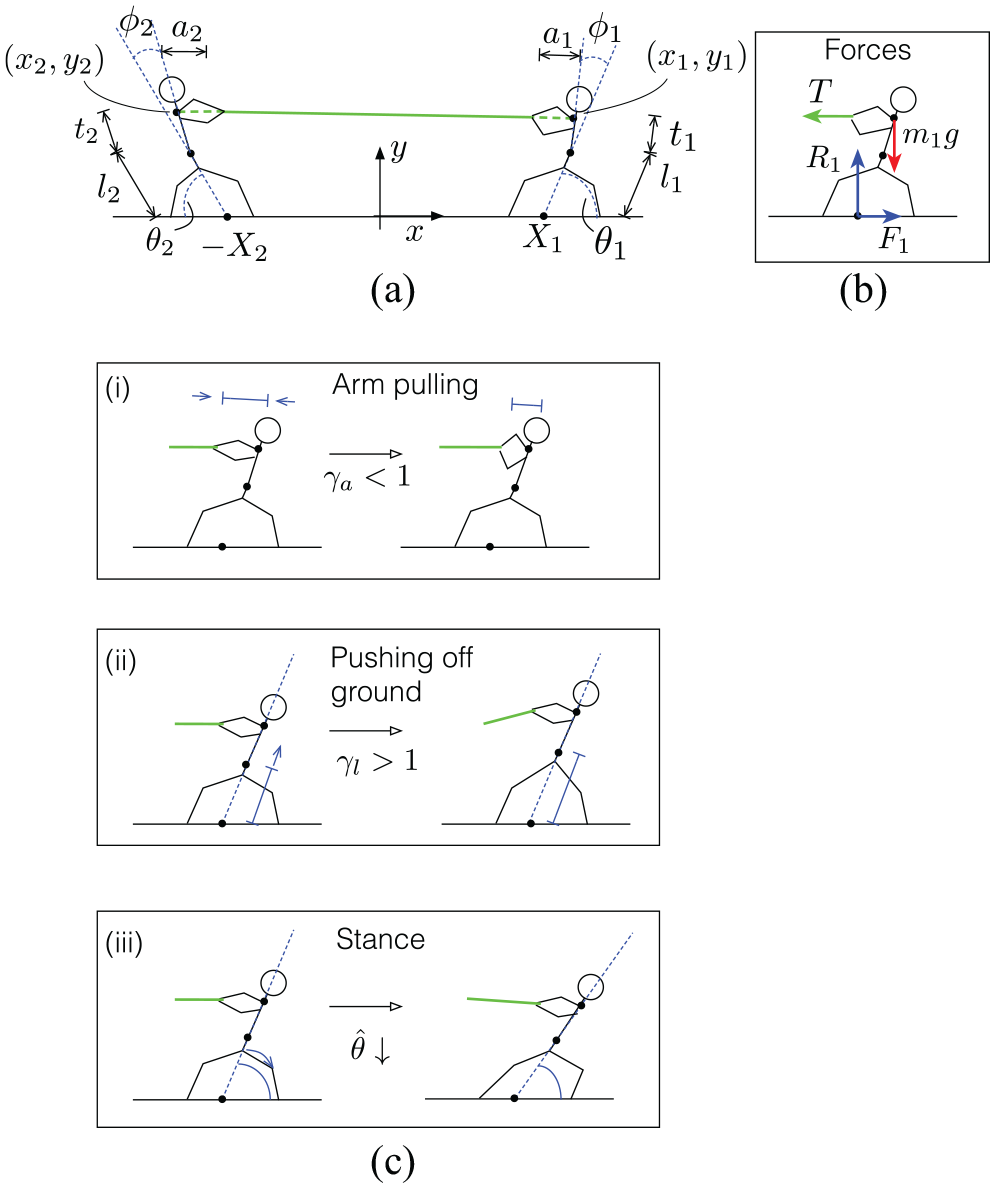
Schematic of our modelling framework. In (a), the variables defining the current configuration of each player are shown. The forces acting on each player (b) consist of a gravitational force due to self-weight, a force acting along the direction of the rope and equal in magnitude to the tension in the rope, and friction and reaction forces. In reality, there would be a set of friction and reaction forces at each foot, but we idealise these to a single set. In (c), the three mechanisms of activation for each player are shown: (i) arm pulling, in which the player shortens the arms, (ii) pushing off the ground, in which the lower body is extended, and (iii) a change in stance, defined by body orientation with respect to the horizontal.
In order to incorporate independent activation of the leg and arm muscles, we idealise each player’s lower body as an actuatable rod situated along the leg axis and with the arms described as a separate rod connecting the concentrated mass to the holding point of the rope via a line that is aligned with the rope. We employ the theory of morphoelastic rods [26, 27], which gives a mathematical framework for growing elastic rods, in order to describe the independent active pulling mechanisms shown in Figure 2(c) (i) and (ii): arm pulling is described by a contraction of the reference length (“negative growth”) of the arms, while pushing off the ground is described by an increase in reference length (“growth”) of the legs. Note that, while morphoelasticity is a theory of growth and remodelling [27], extensions of the theory have also been used to model muscle activation [28] or liquid crystal elastomer actuation [29]. In our case, the rods are taken to be rigid in flexion (no bending), but extensible. The lower body has reference length
The third pulling mechanism we consider is a change in the stance of the players. To characterise this mechanism, we first need to outline a description of the external forces on each player, as depicted in Figure 2(b). Player 2 applies to Player 1 a force

is the unit vector pointing from
In this mechanical description, the objective of each player is to make the other player either slip or stumble. Under dry friction, slipping will occur if
3. Static analysis
We begin by considering a completely static game, in which both players are in mechanical equilibrium, and activation parameters
A force balance on Player 1 reads

Balance of angular momentum for the lower body, about the point

Here, we have used the fact that forces applied to the upper body are directly transmitted through the torso to the lower body. For the upper body, the balance of angular momentum about the hips reads

Similar equations hold for Player 2, though noting sign changes due to the directionality of the rope, orientation angles being defined from the negative



Since the “arms” and lower body are not a fixed length, we also require a force balance plus constitutive description to determine the values of


The axial component of


Since the axis of the arms is assumed to lie along the line of the rope, the resultant force

and we assume again a linear constitutive relation between force and extension,


The rope also satisfies Hooke’s law:

where
Note also the geometric relations




From the above, we obtain a closed system as follows. Considering Player 1, we insert the force balance (7) into the body constitutive law (9), and the arms force balance (11) into the constitutive law (12). These two equations are combined with the moment balances (2) and (3) for the lower and upper body, respectively. Doing the same for Player 2 leads to a set of eight equations. Noting that the rope tension

and activation parameters
3.1. Mass is (almost) everything
Before considering specific solutions to the static system, we demonstrate the challenge of beating a heavier opponent in a static game. This comes as a simple consequence of the form of the friction and reaction components. Namely, equation (1) gives

while equation (4) gives

Since the rope pulls equally on both players, and the friction forces point in opposite directions, the friction components are the same. Naturally, the reaction components each include a component balancing the weight, so that if the rope is horizontal, that is,
3.2. Parameters
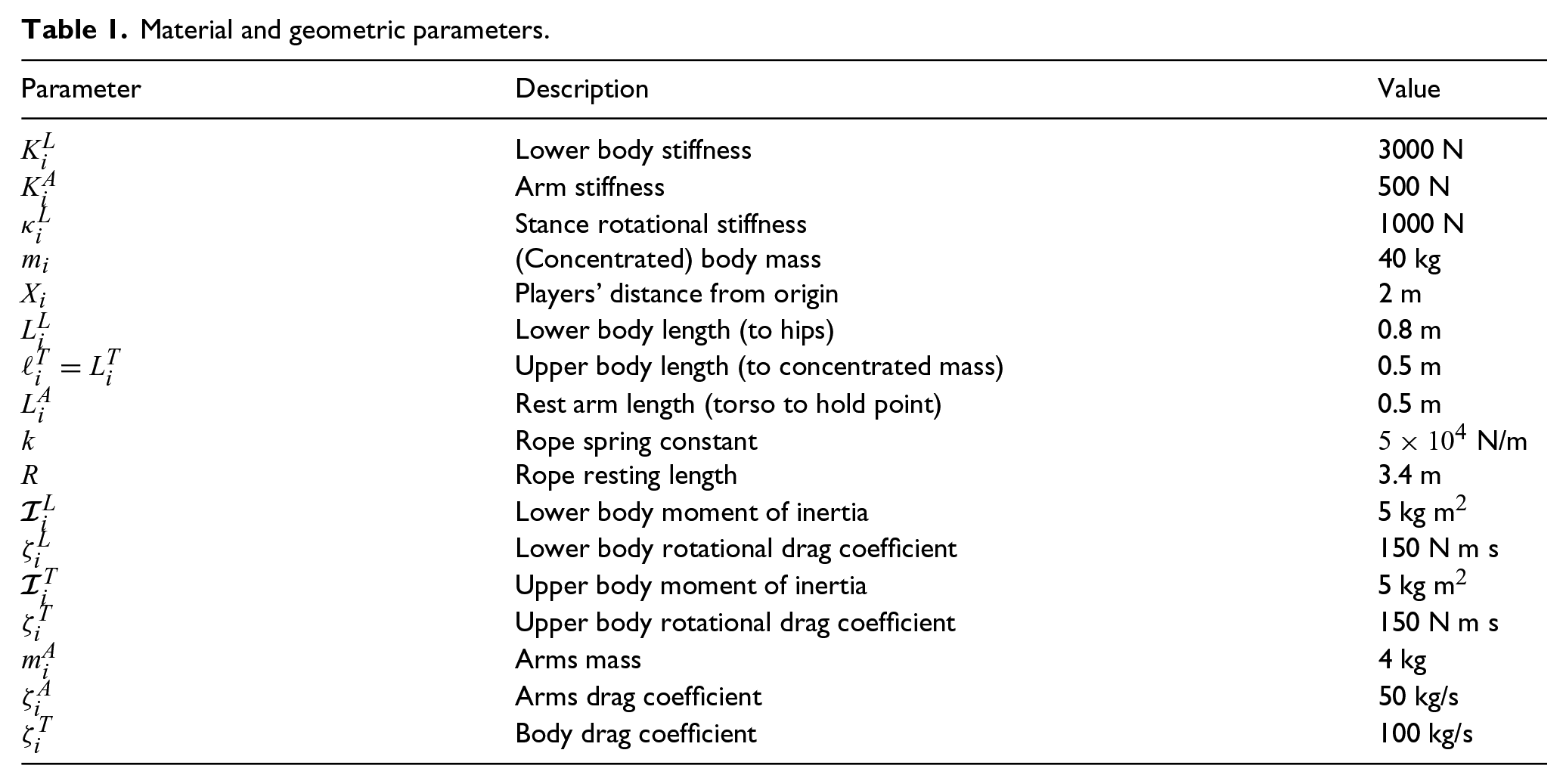
To analyse in detail the effect of the different types of activation, we first fix baseline material and geometric parameters, listed in Table 1. A discussion of these parameter choices is provided in Appendix 1.
Material and geometric parameters.
3.3. Static activation
Figure 3 shows the results of a simulated ‘static’ game in which Player 1 (blue) has a slight advantage in mass, with
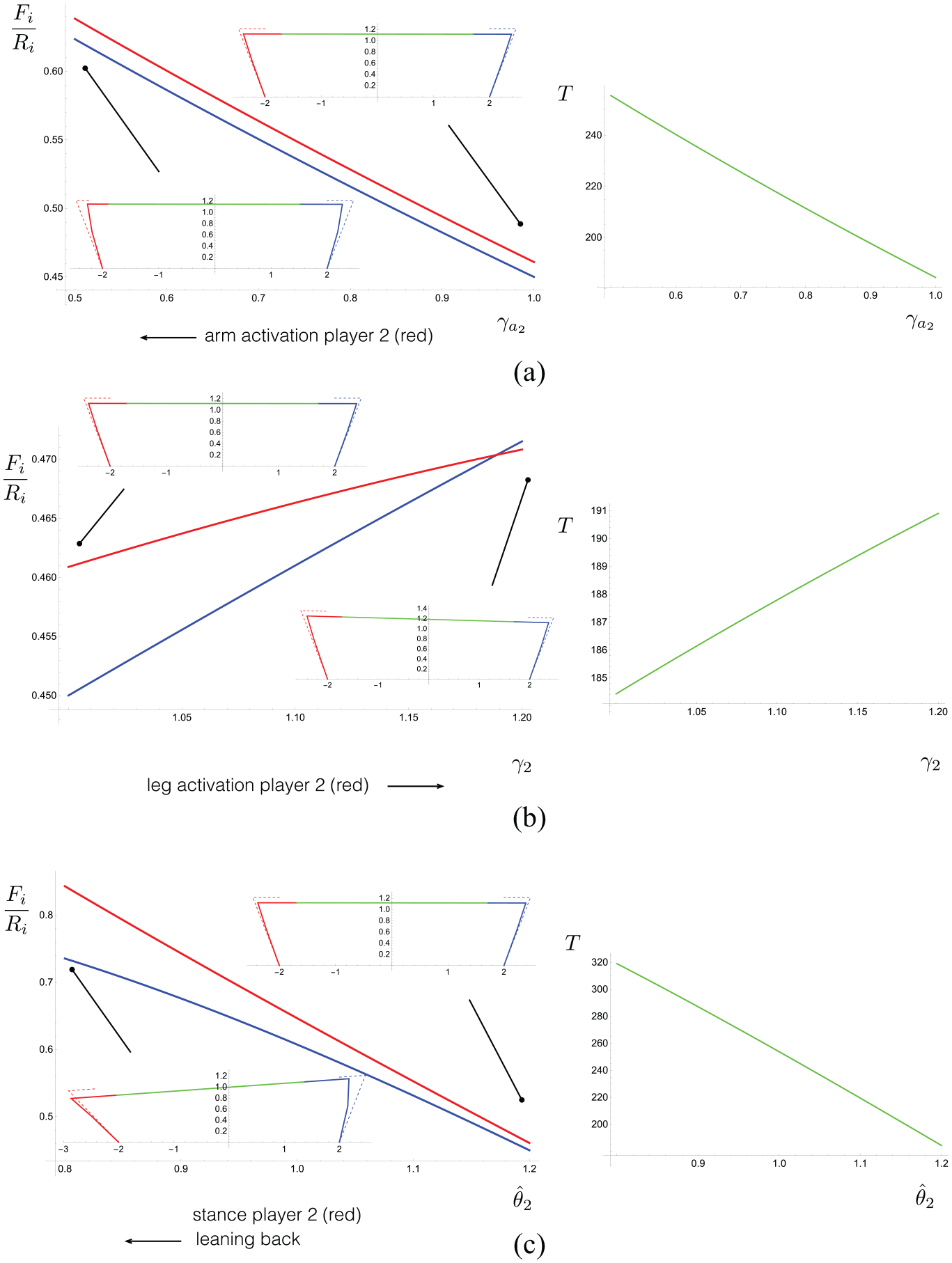
Simulation of a quasistatic game. Player 2 employs arm activation (a), leg activation (b), and a change in stance (c). The friction ratios
In Figure 3(a), we consider arm activation for Player 2,
Figure 3(b) shows the result of leg activation for Player 2, that is,
Figure 3(c) considers a change in the stance of Player 2, in particular a decrease in
4. Dynamics
Having established the severe disadvantage of a lighter player in a quasistatic equilibrium, in this section, we turn to dynamics. In particular, we focus on two types of dynamic motion: a sudden pulling of the rope, and a sudden change in stance. Mathematically, these correspond to taking
From these dynamic activations, we consider slipping in a dynamic sense, defined in the same way as the static case, as the ratio
For computational simplicity, in this section, we fix the lower body length, and include inertial terms in the balances of linear and angular momentum. The momentum balance for the lower body of Player 1 is

Here, the right-hand side contains the same torque terms as the static moment balance (2). The left-hand side includes the rate of change of angular momentum about the pivot point

Similarly, the moment balances for Player 2 are

and

Along with these, we require an inertial force balance for the arms. This takes the same form for both players:

Again the right-hand side includes the static force balance, while the left-hand side includes an acceleration term, with
Taking the torso and leg lengths

while for Player 2 this reads

Since the terms
4.1. Letting up
We first consider a strategy for causing Player 1 to slip. It is instructive to note from equation (27) that the dynamic friction force satisfies

If Player 2 were to cause Player 1 to rapidly accelerate to the left, for example, by a sudden pulling of the rope, the immediate reaction would be a negative acceleration, that is,

the corresponding motion of both players to the left would also imply
Figure 4 shows a simulation of Player 2 ‘letting up’ in two different ways. In Figure 4(a) Player 2 shifts their stance to be more vertical, by increasing
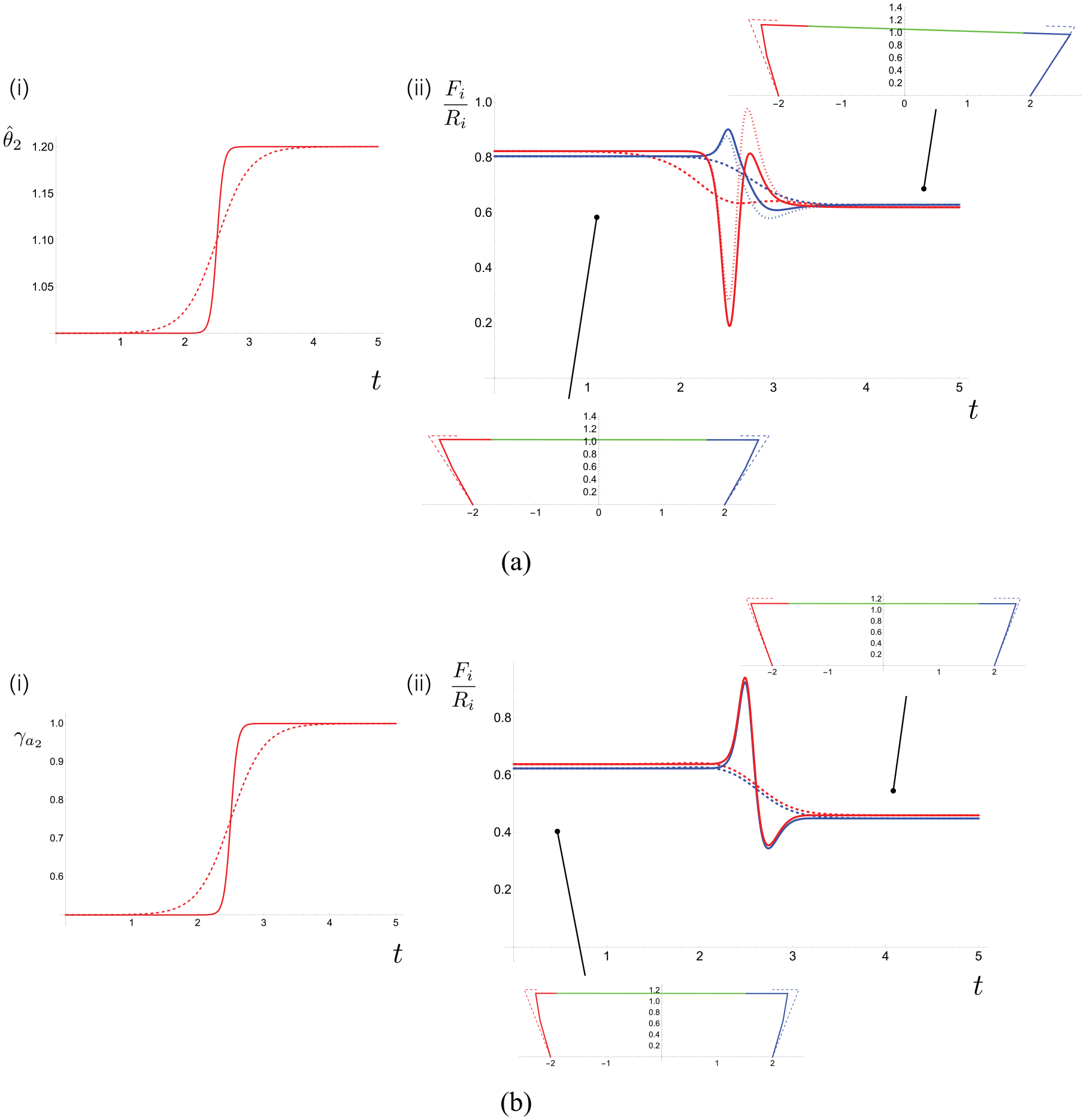
Dynamic simulations with Player 2 employing the “letting up” strategy. In (a), Player 2 makes their stance more vertical, by increasing
On the contrary, in the case of the rapid change in stance, not only do the curves cross over, but the rapid acceleration to the left causes Player 1 to experience a momentary spike in slip ratio, reaching a peak of
In Figure 4(b), we simulate the same strategy of Player 2 letting up, but in this case, with their arms through an increase in
4.2. Quick pull
In Figure 5, we analyse an alternative dynamic strategy of a rapid pulling of the rope in an attempt to make the opponent stumble. As in Figure 4(b), a quick pull with the arms has a symmetric effect, that is, both players move towards each other, and Player 2 cannot gain an advantage over Player 1. Therefore, with all other parameters equal, we restrict our analysis to rapid pulling via a change in stance by decreasing
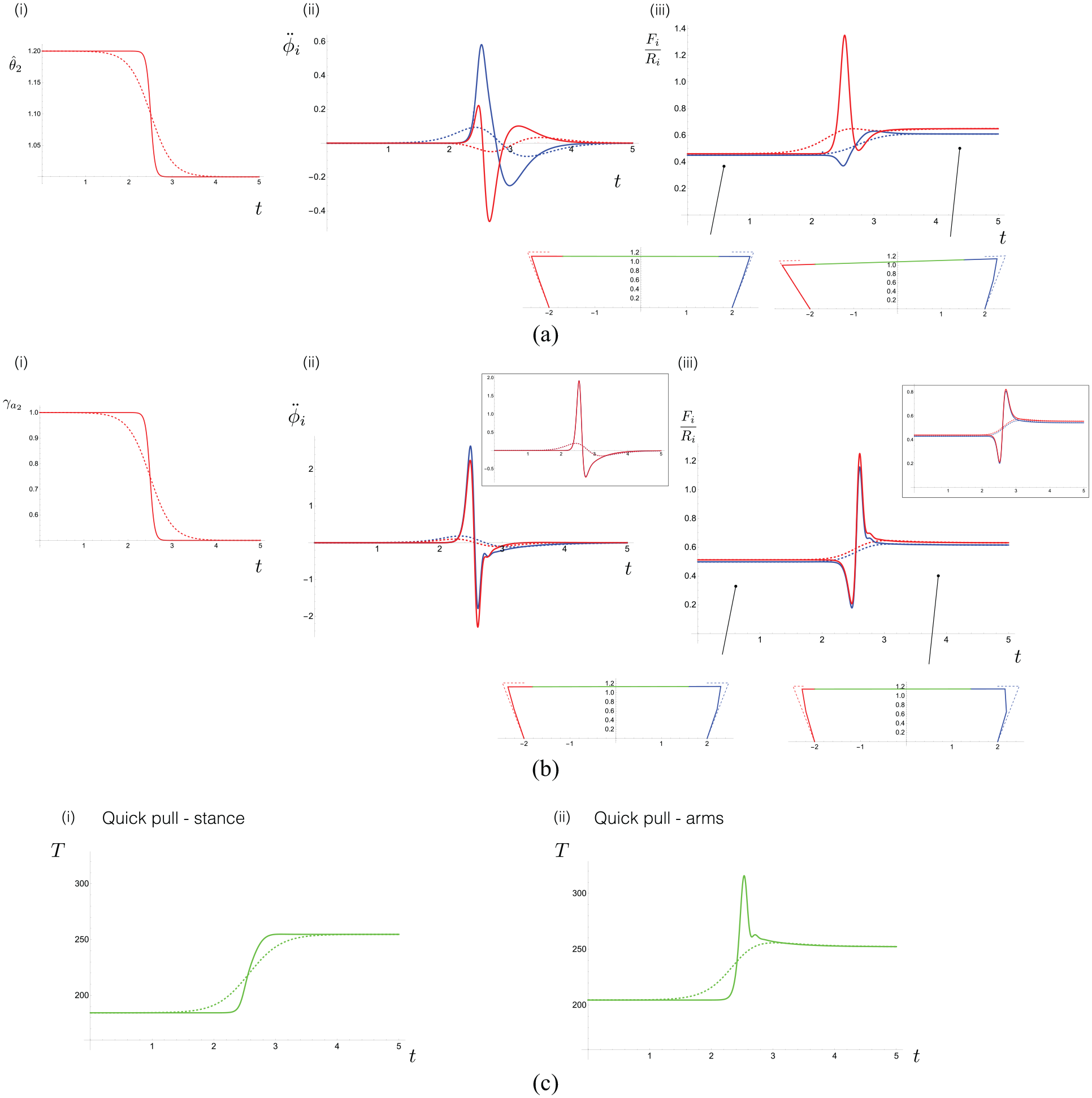
Dynamic simulations with Player 2 employing the “Quick pull” strategy. In (a), Player 2 makes their stance less vertical, in (b) they shorten the arms. Profiles of
Thus far, we have simulated players with identical properties aside from the slight mass advantage of Player 1. Of course, in reality, players will likely differ across a spectrum of characteristics, both in strength and size. As a final example, we simulate in Figure 5(b) a rapid arm pull by Player 2, still with the same mass disadvantage, but with a significantly stronger upper body, by taking
As mentioned in the introduction, one predominant cause of injuries/casualties is the extremely fast release of energy that occurs in the event of rope failure. This will happen if the tension in the rope exceeds a critical threshold. Here, it is important to note that the tension is also a dynamic variable, and a static analysis of the potential forces applied by players is insufficient. To demonstrate, in Figure 5(c) we plot the tension in the rope corresponding to the rapid pulls from Figure 5(a) and (b). In the case of the change in stance, Figure 5(c) (i), even with a rapid change in stance, the tension transitions between the static values smoothly and nearly monotonically. However, with the arm pull, and with the significant upper body strength of Player 2, Figure 5(c) (ii), there is a large spike in the tension during the dynamic motion, reaching a maximum value that is 25% higher than the final static value.
5. Discussion
Mathematical modelling of sport is inherently challenging. Biomechanical and/or physiological descriptions of a specific motion of the body during sport are already complex and high-dimensional, potentially involving the activation of numerous muscle groups, tendon mechanics, joint reaction forces, heart rate, oxygen uptake, neuromechanical effects, energy expenditure, stamina, among other processes [31–34]. Naturally, the complexity only increases when including variable motion, multiple people physically interacting, detailed tactics, and intangible factors such as psychological momentum [35]. Of course, these complexities are part of what makes the outcome of a sporting event unpredictable and perhaps ultimately what makes sport entertaining. In terms of modelling, though, it is clear that a detailed mathematical description of any sport would likely be completely intractable. Sports predictions, for example, for betting purposes, are usually based on play-by-play simulation, for example, with Markov Chain decisions, or direct simulation [36, 37], both of which are data-driven approaches that rely on statistics from previous results and do not explicitly include any mechanics. Nevertheless, most sports are intrinsically mechanical, and training largely involves preparing the body to complete a mechanical task in a near-optimal way.
In this paper, we have developed and analysed a mathematical model of the mechanics of a game of tug of war between two players. In light of the complexities outlined above, tug of war provides perhaps an ideal case study for investigating mechanics in sport. At a glance, the game appears simple: two teams pull on opposite ends of a rope, and whichever team pulls harder will win. However, a closer look quickly reveals a number of complexities in the game, characterised by multiple degrees of freedom, non-trivial mechanics, and various strategic choices open to the players. Still, the game is largely played in approximate mechanical equilibrium, and physical motions are relatively simple; this combination means that an idealised mathematical description is possible in which governing equations remain solvable while still containing sufficient detail and degrees of freedom to explore the intricacies of the game. While previous papers have exploited this relative simplicity to derive mechanical descriptions of rope pulling, our analysis provides the first mechanical description capable of simulating an actual game, in which player strategy may be explicitly investigated.
Beginning with an analysis of a static game, we first showed that a lighter player is at a significant disadvantage. While this observation is not new [25], our analysis provides in simple equation form the challenge faced by the lighter player, and our quantitative analysis illustrated the possibility of gaining the advantage by becoming taller through leg activation as well as how some forms of pulling activation, in fact, make the situation worse. We then turned to a dynamic description of the game, and focused on the simple questions: Can the lighter player win?, and if so, what is their best strategy? In our modelling framework, a strategy consists of a time-dependent change in one or more of the reference properties of the player which would, in a more detailed biomechanical description, be mapped to contraction of the relevant muscle groups. It is important to highlight here the distinction between the reference lengths and the actual lengths. For instance, in an “arm pull” strategy, the player activates their arm muscles in an attempt to bring their hands closer to their torso. But this does not mean that they will necessarily shorten the arm length; it is only in solving the force and moment balances, that is, considering all the variables, that one can determine how much they actually change the state of the system.
In quantifying the success of a strategy, we have made the important distinction between stumbling, in which the player’s upper body is suddenly pulled forward causing a loss of balance, and slipping, in which the ratio of friction force to reaction force at the feet exceeds the slipping threshold. The former is induced by an acceleration of the upper body towards the other player, while the latter is, somewhat counter-intuitively, induced by the opposite, an acceleration away from the other player. By simulating sudden changes in activation by the lighter player, we demonstrated that inertial activations do exist for which the lighter player can cause the heavier player to slip or stumble but that the success is highly dependent on the activation rate. This analysis also highlighted the dual nature of any activation: in each case, the execution by the lighter player must be just right in order to avoid causing themselves to first slip or stumble.
While our analysis has focused on the possibility of a lighter player beating a heavier player, there are many more directions of analysis within our modelling framework that could be interesting, for instance, if the players have equal mass but differing strength characteristics (modelled e.g. by unequal stiffness parameters), how does such asymmetry impact the dynamics of the game? The strategies that can be investigated with our model are in principle straightforward to implement in a real game. Whether these would result in outcomes in line with model predictions depends on a number of factors, and suggests some useful directions for future research. Qualitative features are likely to hold, as these are consequences of the basic physics underlying the game. A strong quantitative agreement is unlikely given the idealisations built into the model, though this may be possible if the mechanical stiffness parameters were tuned. We have made efforts to determine realistic parameters, which in the case of mechanical stiffness values has required its own separate modelling, with assumptions and idealisations therein. More realistic values may be attainable with more detailed modelling, and/or the values could be calibrated to a player and/or game. A particularly useful direction for future research would be to link biomechanical descriptions of muscle contractions with the idealised activation parameters
To the best of our knowledge, this paper provides the first attempt to analyse tug of war mechanically, from the angle of the competition between several players, in contrast to biomechanical approaches that focus on the pulling performances of one player. For the sake of simplicity, we restricted our attention to the case of two opponents, while evidently, actual tugging war contests involve more players; from eight players per team as per the Tug of War International Federation standards [9], up to several hundred on much rarer occasions. The team strategy and collective dynamics that emerge from a large number of players may be non-intuitive and include potentially interesting aspects of nonlinear complex systems and collective behaviours, such as synchronisation, waves, spontaneous oscillations, or resonance-like effects.
Overall, our relatively simple modelling strategy has captured essential features of the game and illustrated somewhat non-intuitive strategic consequences, emerging from basic Newtonian mechanics. To make progress, our approach should be combined with recent advances in computational human biomechanics to improve our analysis of the complex winning ways of the oldest game in humanity.
“The only thing that truly matters in what we do is having fun.”
Footnotes
Appendix 1
Acknowledgements
The authors extend their warmest congratulations to their colleague Alain Goriely for his election as Fellow of the Royal Society of London. His approach and contributions to science and mathematics are inspiring, and the authors are sincerely grateful for his unwavering, friendly support, invaluable trust, and significant intellectual influence. This work was performed in secrecy. It is thus with a subtle nod that HO attributes the covert triumph of this mischievous plot to Alain’s distinctive aversion to micro-management. The authors are also grateful to Chad G. Petri, whose enigmatic yet invaluable conversations about tug of war and almost algorithmic writing precision contributed to the finalisation of the introduction.
Declaration of conflicting interests
Mathematical notebooks with implementation of the model and output of model results are available upon request.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.