
Abstract
A hierarchy of asymptotic models governing long-wave low-frequency in-plane motion of a fluid-loaded elastic layer is established. In contrast to a layer with traction-free faces, modelled by Neumann boundary conditions, a fluid-loaded one assumes more involved conditions along the interfaces, dictating a special asymptotic scaling. The latter corresponds to a fluid-borne bending wave, controlled by elastic stiffness of the layer and fluid inertia. In this case, the transverse inertia of the layer and fluid compressibility do not appear at zero-order approximation. The first-order approximation is associated with a Kirchhoff plate, immersed into incompressible fluid. In the studied free vibration setup, the fluid compressibility has to be taken into account only at third order, along with elastic rotary inertia. Transverse shear deformation enters the second-order approximation along with a few other corrections. The conventional impenetrability condition has to be also refined at second order. Dispersion relations corresponding to the developed asymptotic models are compared with the polynomial expansions of the full dispersion relation, obtained from the plane-strain problem of linear elasticity.
Keywords
1. Introduction
Numerous problems involving fluid loading of vibrating structures have been extensively studied in the literature since long ago. Particular interest in this area was manifested by Lord Rayleigh, who in his “Theory of Sound” [1] analysed the “reaction of the air on a vibrating circular plate.” The majority of the theoretical considerations on the subject start from the classical two-dimensional (2D) structural theories, such as the Kirchhoff theory for thin elastic plates (e.g., see books [2, 3] and the Rayleigh lecture [4]). We also cite insightful papers [5–9] reporting on explicit analytical results spanning over eight decades.
At the same time, not much has yet been done for the mathematical justification of the models in fluid–structure interaction using heuristic plate and shell theories. Among a very few publications attempting to address this key issue, we mention Johansson et al. [10] using polynomial expansions along the thickness of a fluid-loaded flat elastic layer. However, the derivation in this paper lacks of asymptotic consistency and hardly can be useful for further implementation. Interesting observations in Sorokin and Chubinskij [11] concerned with the validity of the Kirchhoff theory, along with some other ad hoc setups, mostly promote an engineering approach.
There were also efforts, see Belov et al. [12] and Kaplunov et al. [13, 14], to adapt asymptotic results earlier established for elastic structures not interacting with fluid; in doing so, fluid loading was considered as the prescribed forcing terms in the equations governing plates or shells. In the latter case, all approximate theories for thin structures naturally follow from asymptotic analysis of Neumann boundary value problems for the three-dimensional (3D) equations in elasticity (e.g., see books [14–18]). To this end, the results in Belov et al. [12] and Kaplunov et al. [13, 14] need more verification and development. The point is that fluid loading of an elastic structure is governed by more involved boundary conditions, rather than Neumann ones, modelling given mechanical loads on its faces. This motivated full asymptotic analysis of the coupled fluid–structure interaction problems.
A similar problem arises in analysis of a plate resting on a Winkler foundation (e.g., see Frýba [19]). The conventional approximate statement was recently compared with the outcomes of asymptotic analysis, starting from the associated problems in plane and 3D elasticity (see Erbaş et al. [20, 21]). In this case, the contact of an elastic layer with a Winkler foundation was modelled by mixed boundary conditions instead of a Neumann one. In addition, the assumption of a relatively soft foundation was made. It was demonstrated that the popular engineering setup of a Kirchhoff plate on a Winkler foundation fails near the lowest cut-off frequency (see also Erbaş [22]).
In this paper, we consider the simplest geometric configuration of an immersed elastic layer. Free in-plane vibrations are studied over the long-wave low-frequency domain. The focus is on the fluid-borne bending wave primarily influenced by plate stiffness and fluid inertia (e.g., see Talmant et al. [23]), which certainly is not a feature of a layer not interacting with fluid. The associated scaling is inspired by a preliminary dispersion analysis in Kaplunov et al. [24]. The proposed asymptotic procedure naturally extends that for a plate with traction free faces (e.g., see Kaplunov et al. [14], Goldenveizer et al. [25], and references therein). The leading order approximation is derived, along with three higher-order ones. Comparisons of the obtained shortened equations with the asymptotic behaviours of the exact dispersion relation illustrate the consistency of the presented results. The latter are used for the critical assessment of the well-known formulations using the classical and refined plate equations. It is demonstrated that plate transverse inertia and fluid compressibility can be neglected at leading order. The former comes to play at next order, whereas compressibility has to be taken into account only at third order. The effects of shear deformation, rotary inertia, and other mechanical phenomena are evaluated. The asymptotic correction to the traditional kinematic impenetrability condition along the fluid–solid interface is also established.
This paper is organised as follows. The statement of the problem is given in section 2. Section 3 is concerned with the derivation of the various asymptotic approximations, with asymptotic models of all four orders being presented in section 4. Section 5 presents dispersion relations for all four approximations and the numerical results are given therein, with concluding remarks in section 6.
2. Statement of problem
Consider free vibrations of an isotropic elastic layer of thickness
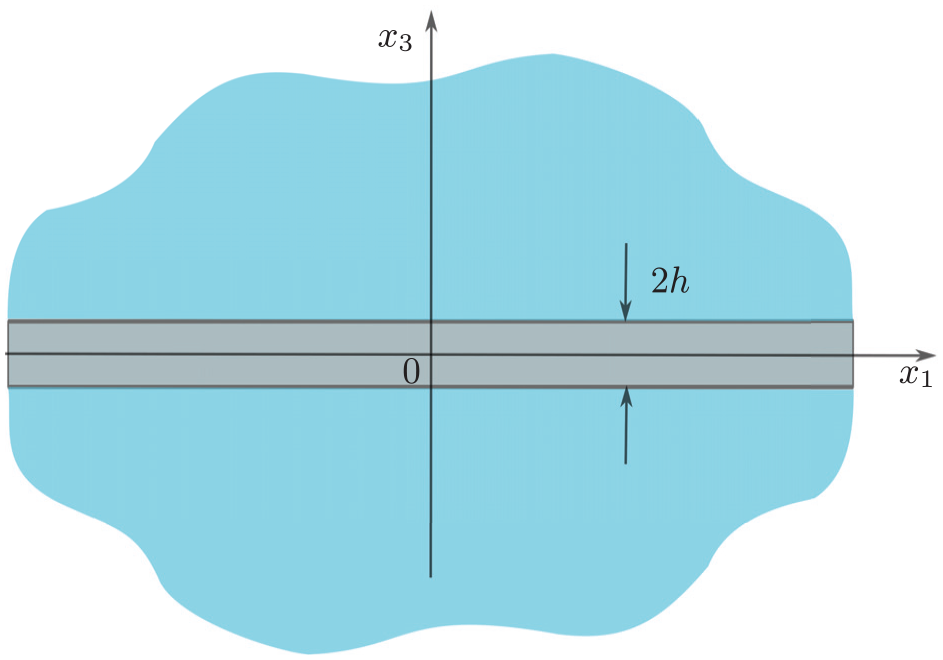
Fluid-loaded elastic layer.
We restrict ourselves to a plane strain problem in the coordinates

Here and below,
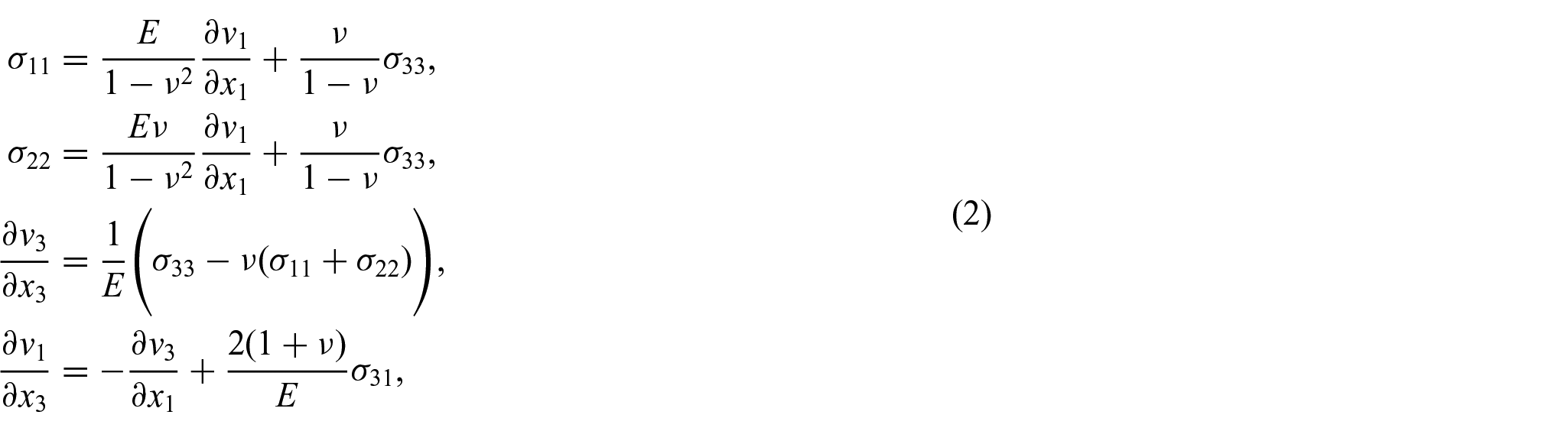
oriented to the forthcoming asymptotic analysis (e.g., see Kaplunov et al. [14]).
In addition, we have the wave equation for the fluid displacement potential

The interfacial conditions at

The aim of this paper is to derive asymptotic models of the formulated problem over long-wave low-frequency region, where
3. Asymptotic derivation
3.1. Scaling and dimensionless equations
Let us scale the independent variables specified in the previous section by:

where

which is motivated by the relation
Now, we introduce the dimensionless stresses, displacements, and fluid potential, setting:

Here, all the starred quantities are assumed to be the same asymptotic order, i.e., of order unity. The asymptotic orders of the displacements and stresses in equation (7) are the same as for a bending wave on an elastic plate not contacting fluid, elastic plate (e.g., see Kaplunov et al. [14]). At the same time, for the latter, a typical time scale is
Thus, equations (1) and (2) in the last section, taking into account relations (5) and (7), can be written in dimensionless form as:

and
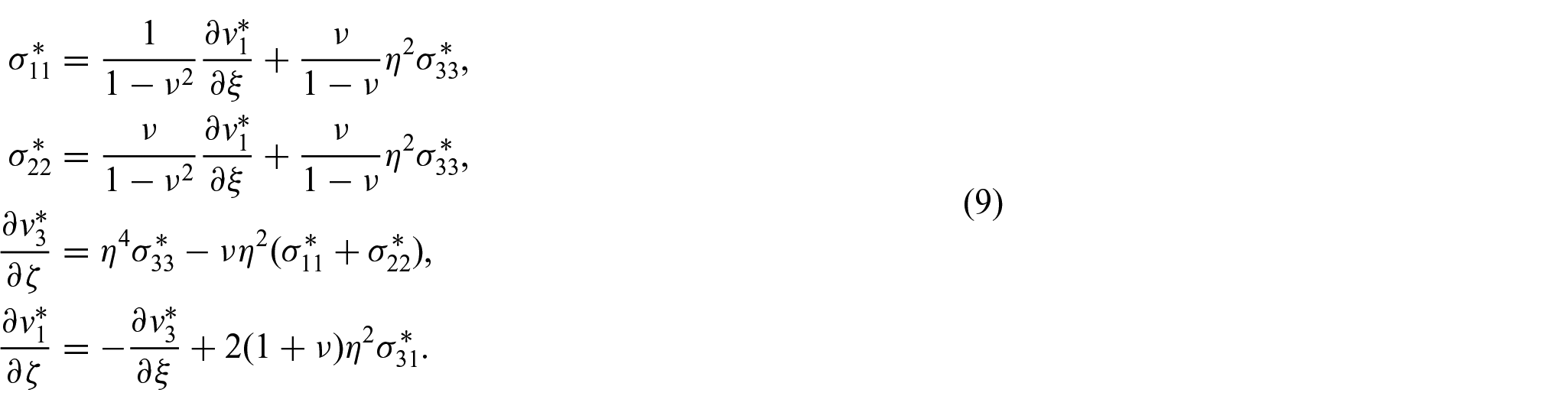
Similarly, the dimensionless form of equations (3) and (4) can be obtained using equations (5)–(7), which gives the following:

and

where:

Now, expand the starred stress and displacement components in an asymptotic series as:
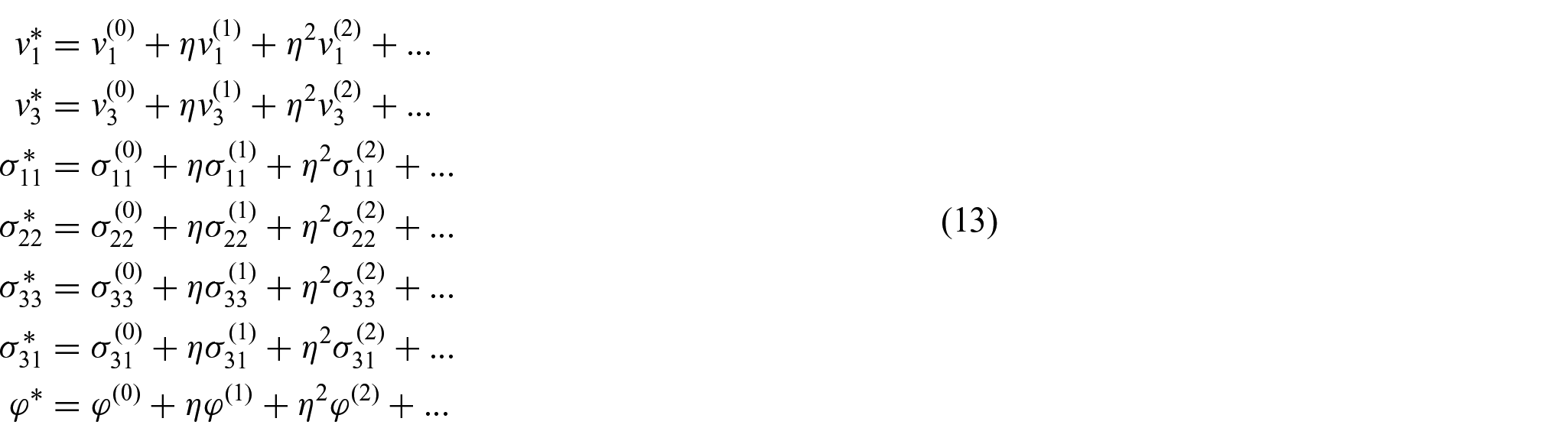
leading to shortened forms of the original plane strain problem in hydro-elasticity.
In what follows, we derive four asymptotic approximations, considering antisymmetric motion about the midplane
3.2. Leading order approximation
We consider the leading order approximation of the problem formulated in the previous section, keeping only the terms with the suffix

Substituting the displacements (14) into equations (9)1 and (9)2, we obtain:

Next, integrating equation (8)1 along

where

Now, the fluid potential at leading order can be determined by inserting equation (13)7 into equation (10), giving the Laplace equation:

governing incompressible fluid. Furthermore, the boundary conditions, obtained by inserting equation (13) into equation (11), are:

By applying equations (19)1 and (19)2 into equations (16) and (17), respectively, we obtain:

and

The last equation governs bending of a thin elastic plate with the inertial term originating from fluid motion. Below, we discuss the related asymptotic model in detail.
3.3. First-order approximation
In this section, we derive the first-order approximation of the problem formulated in section 3.1 but now keeping also the terms with the suffix (1) in the asymptotic series (13). Below, we omit some of the intermediate computations as the procedure is essentially the same as in the previous section. Now, we have:

and
where

Note that the last term in the expression for
Next, applying equations (24)1 and (24)2 into equations (23)5 and (23)6, respectively, we obtain:

and

In what follows, we demonstrate that the above equation, combined with equation (21), corresponds to a fluid-loaded Kirchhoff plate.
3.4. Second-order approximation
Let us proceed towards deriving the second-order approximation. Analysis of relations (9) shows that at this order, the “Poisson effect” of the stress

and also:
where

Applying equations (29)1 and (29)2 into equations (28)5 and (28)6, respectively, we derive:

and

Eliminating the sixth-order derivative in equation (31) using equation (21) (see Kaplunov et al. [14] and Goldenveizer et al. [25] for more detail), we arrive at:

This equation corresponds to a refined theory of plate bending under fluid loading, which, however, does not take into consideration rotary inertia. The latter appears only at the next order, in contrast to a free plate for which the effect of rotary inertia is of the same order as that of transverse shear deformation (see again Kaplunov et al. [14] and Goldenveizer et al. [25]).
3.5. Third-order approximation
Finally, we derive the third-order approximation of the original problem. This time, the inspection of dimensionless equations (8) and (10) indicates that rotary inertia and fluid compressibility have to be retained. Then, we obtain:

and
where

Applying equations (35)1 and (35)2 into equations (34)5 and (34)6, respectively, we have:

Also, after eliminating the term with a sixth-order derivative in the same manner as in the previous subsection, we arrive at:

This equation is in agreement with the refined equation for a free plate, loaded along its faces, addressed in Kaplunov et al. [14] and Goldenveizer et al. [25].
4. Asymptotic models
In this section, we formulate asymptotic models, i.e., the shortened equations of motion for a thin elastic plate and fluid, as well as the impenetrability conditions along the interfaces, starting from the results established in the previous section. At leading order, from equations (18), (19)3, and (21), we get:


and

where


and

Here and below in this section, the transverse displacement
This is the simplest asymptotic model for a fluid-loaded elastic plate. It incorporates plate stiffness, fluid inertia, neglecting plate inertia, and fluid compressibility. In this case, the impenetrability condition takes a well-known form.
Now, we consider the sum of equations (21) and (26), multiplied by the small parameter

Below,

and

Formulae (44)–(46) can be re-written as:

where

As follows from equations (45) and (46), the last equation should be considered together with equation of fluid motion (42) and impenetrability condition (43). Thus, the plate inertia is the only correction coming at this order. As a result, relations (42), (43), and (48) govern vibrations of a Kirchhoff plate, immersed in incompressible fluid.
Next, similarly to the derivation above, we have from equations (21), (26), and (32) neglecting

where

In terms of original variables, equations (49) and (50) are given by:

and

The last two relations have to be considered together with equation (42) for incompressible fluid. It is remarkable that at this order
Finally, we deduce from equations (21), (26), (32), and (37), neglecting

where

In original variables, equation (53) takes the form:

together with the equation governing the compressible fluid (3) (equation (54) rewritten in original variables) and impenetrability condition (52), this equation corresponds to the third-order asymptotic model. In comparison with second-order model above, the latter incorporates rotary inertia and fluid compressibility. It is worth noting that the aforementioned third-order model coincides with the refined asymptotic formulation for a free plate in Kaplunov et al. [14] and Goldenveizer et al. [25]; see also Belov et al. [12], where fluid is treated as a mechanical load, prescribed along the faces.
5. Dispersion relations for derived asymptotic models
In this section, we derive the dispersion relations corresponding to the approximate formulations established in section 4.
Let us begin with the travelling wave solution of the problem (41)–(43), setting:

where

where

Next, substituting equation (56) into equations (42), (43), and (48), we arrive at the dispersion relation, corresponding to the first-order asymptotic model:

Now, we set:

with

Similarly, insert

into the equations of the third-order approximation, given by equations (3), (52), and (55). As a result, we have:

where:

It can be easily verified that at
Numerical results for an aluminium layer immersed in water are presented in Figures 2–5. The problem parameters are
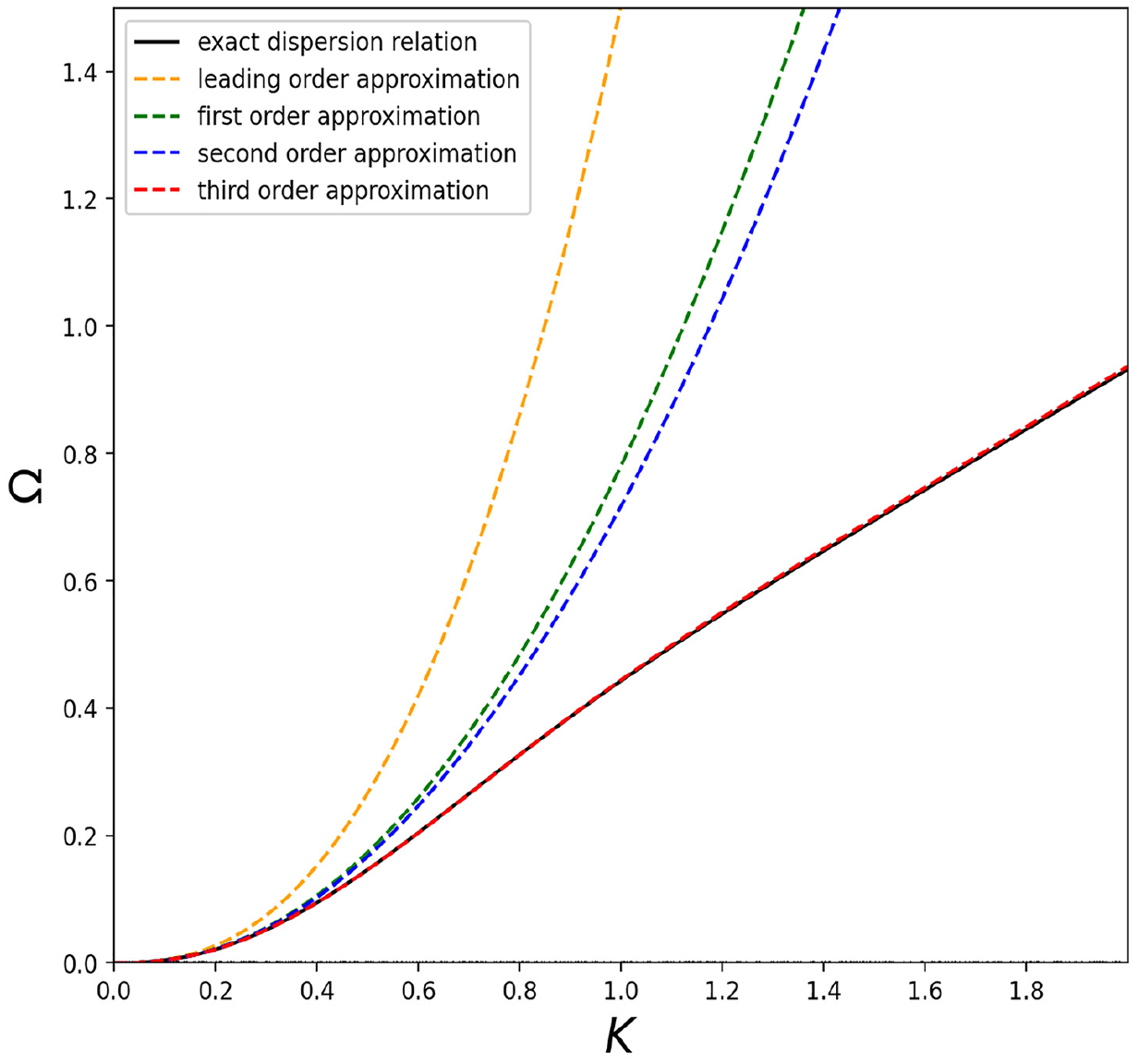
Comparison of the full dispersion relation (65) (solid black line) with the dispersion relations (57) (dashed orange line), (59) (dashed green line), (61) (dashed blue line), and (63) (dashed red line), corresponding to zero-, first-, second-, and third-order asymptotic models, respectively.
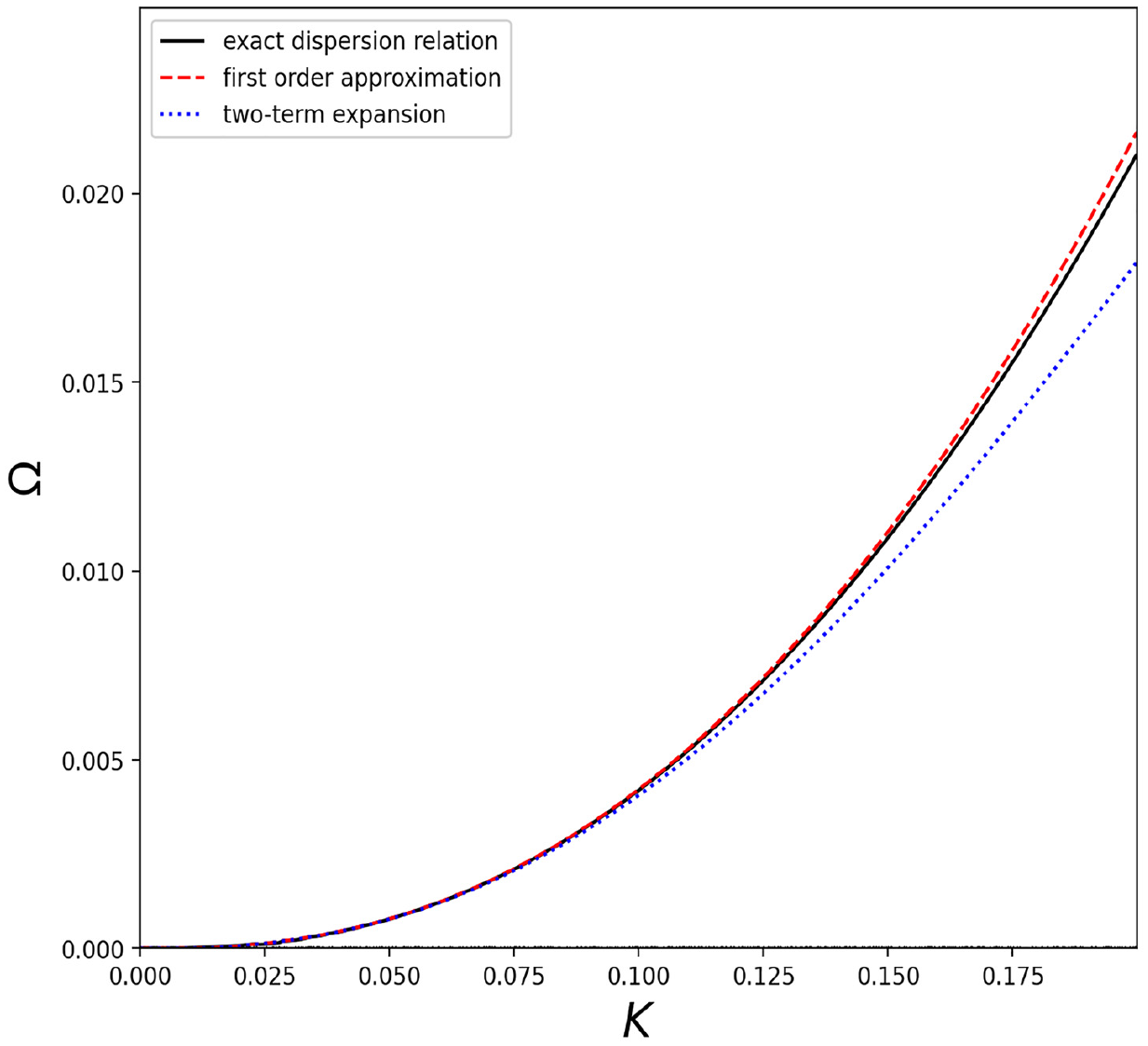
Comparison of the dispersion relation (59) (dashed red line), corresponding to the first-order asymptotic model, with full dispersion relation (65) (solid black line) and two-term expansion in equation (69) (dotted blue line).
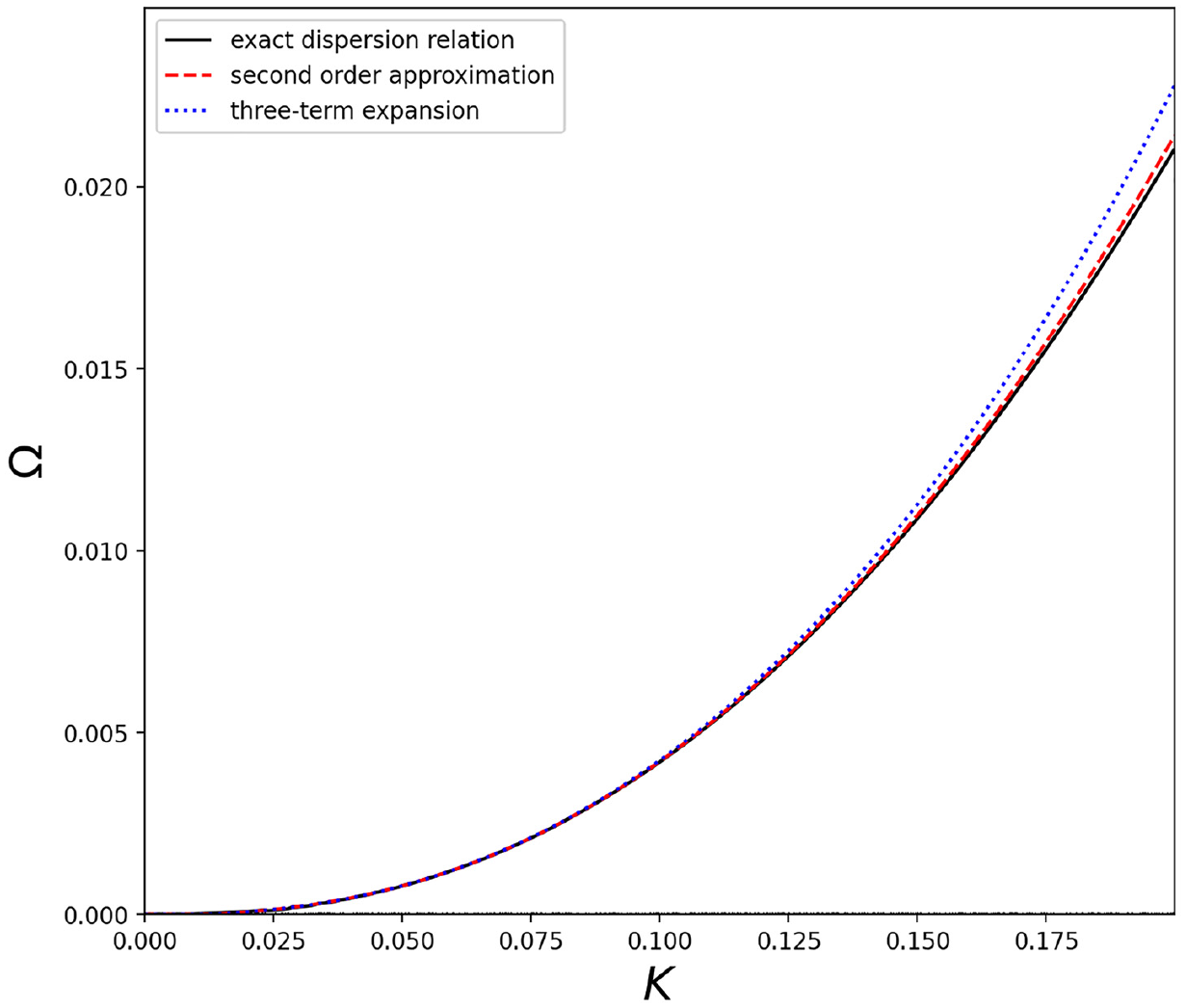
Comparison of the dispersion relation (61) (dashed red line), corresponding to the second-order asymptotic model, with full dispersion relation (65) (solid black line) and the three-term asymptotic expansion (69) (dotted blue line).
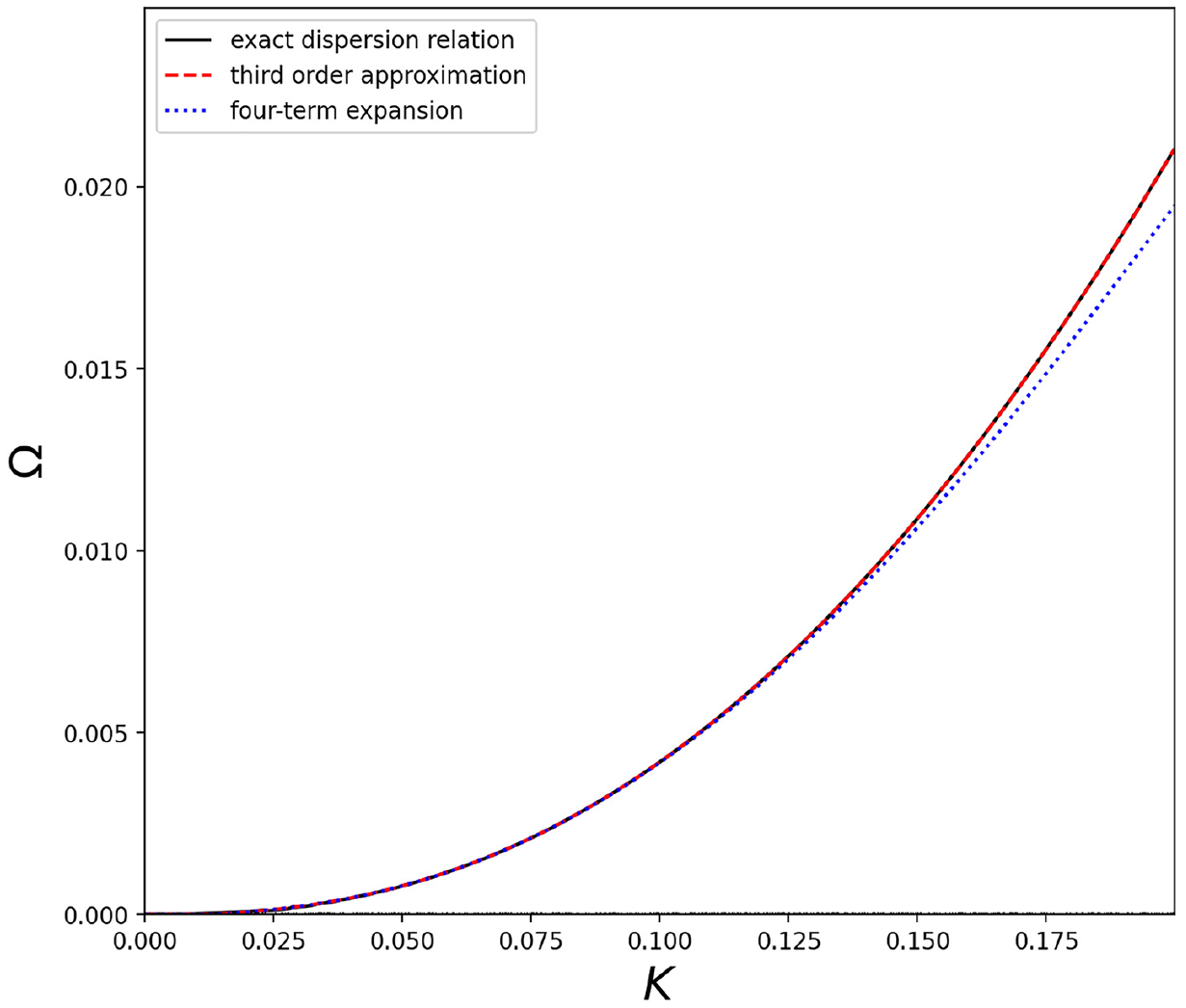
Comparison of the dispersion relation (63) (dashed red line), corresponding to the third-order asymptotic model, with full dispersion relation (65) (solid black line) and the four-term asymptotic expansion (69) (dotted blue line).
Figures 3–5 show the comparison of the dispersion relations (59), (61) and (63) with two-, three-, and four-term polynomial expansions in Appendix 1 (see equation (69) together with equation (70)).
6. Conclusion
Asymptotic analysis of a plane problem for a fluid-loaded elastic layer is developed over a long-wave low-frequency domain. The chosen scaling (5), corresponding to a fluid-borne bending wave, is different to that for a free elastic layer. At the same time, the relative asymptotic orders of displacements and stresses (see equation (7)) are the same as for a ‘free layer (see Kaplunov et al. [14] and Goldenveizer et al. [25]).
Four asymptotic approximations are derived. At leading (zero) order, only elastic plate stiffness and fluid inertia have to be retained (see equation (41)). The plate transverse inertia appears at the next order. The associated fluid–structure interaction model (42), (43), and (48) involves a Kirchhoff plate immersed in incompressible fluid. Fluid compressibility has to be taken into consideration only at third order. Thus, the approximation of incompressible fluid often appears to be accurate enough to be adapted together with shortened low-dimensional equations governing free plate vibrations, in particular, the aforementioned Kirchhoff equation and some of its refinements. However, it might be expected that fluid compressibility is essential for forced vibrations analysis. In the latter case, asymptotic procedure will involve two independent parameters, corresponding to typical wavelength
In contrast to a free plate, the effects of transverse shear deformation arises at second order, whereas that of the rotary inertia has to be kept only at third order, see equations (51) and (55), respectively. It is remarkable that third-order equation of plate motion (55) also follows from the refined asymptotic theory for a free plate in Kaplunov et al. [14] and Goldenveizer et al. [25], in which fluid is treated as a prescribed mechanical load. It is also worth noting that the correction to the traditional impenetrability condition (43) comes at second order (see equation (52)).
The dispersion relations obtained from the derived asymptotic models (57), (59), (61), and (63) are compared with the expansions of the “exact” dispersion relation (65), demonstrated in Appendix 1. Numerical examples are also presented.
Footnotes
Appendix 1
Acknowledgements
Bursary for S.S’s PhD by Keele University is gratefully acknowledged.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.