In this paper, we determine the constitutive relations for structurally anisotropic materials from a reference with initial strain or initial stress. Using reference independence of strain energy density, we first deduce the relationship of various initial strain measures with material symmetry and determine the resulting structural tensors. We use these structural tensors to derive the necessary invariants for initially strained materials. We also Examine the polyconvexity of the derived invariants and determine constitutive relations for the initially strained Ogden model. Next, we determine the constitutive relation for a combination of initial stress-texture symmetry which may be a more popular approach of recent interest. We deduce four reference-independent constitutive relations for initially stressed transversely isotropic incompressible materials. The first two strain energy functions are linear in the left Cauchy stretch and its cofactor, respectively, in the stress-free state. In the absence of initial stress, the third strain energy function involves all standard invariants for transversely isotropy. To deduce this strain energy in the presence of initial stress, we invert a fourth-order tensor and perform several involved tensor calculations. Finally, we obtain the constitutive relation for an initially stressed transversely isotropic limited chain extensible (LCE) model. To determine the initial stretch in the preferred texture direction in terms of initial stress, we utilize the geometrical interpretation of the Almansi strain measure.
In this paper, we develop hyperelastic models for (structurally) isotropic and anisotropic incompressible materials under initial strain and initial stress. Equal attention is dedicated to both initial strain and initial stress symmetry (ISS) since each of them is useful. We first determine the required invariants and energy functions for initial strain symmetry and study their polyconvexity. Next, we develop four different reference-independent models for initially stressed structurally anisotropic incompressible materials which involve all standard invariants. The existing reference independent models, e.g., initially stressed neo-Hookean models [1, 2] and initially stressed Mooney–Rivlin model [3], are applicable for initially stressed isotropic materials. One of the models we develop in this paper is the first stretch limited (LCE) model for initially stressed transversely isotropic materials. Developing one of the models requires inverting a fourth-order tensor.
Hoger [4] investigated the form of initial stress possible in an elastic body with material symmetries. She obtained a necessary condition that initial/residual stress must satisfy in a material with symmetry. However, the initial strain may also have similar relationships with material symmetry which is investigated in this paper.
Hoger [4–7] and Johnson and Hoger [8, 9] investigated the influence of initial stress in material symmetry and its responses. Gower et al. [1, 2], Agosti et al. [3], Shams et al. [10], Ogden and Singh [11], and Shariff et al. [12] modeled stressed materials with initial stress as a symmetry tensor. Many recent works have opened a wide window of opportunities for materials within the class of residually stressed materials. For instance, Jha et al. [13, 14] developed the constitutive modeling of residually stressed viscoelastic solids [13] and also introduced a general non-local model for residually stressed materials [14]. Font et al. [15] investigated the influence of residual stress on the localized bifurcation of extended and stretched cylinders associated with various diseases like abdominal aortic aneurysms. The biological tissues participating in such instabilities often involve texture-driven symmetries coupled with residual stress which is our present interest in modeling. Shariff et al. [12, 16, 17] and Shariff and Merodio [18] introduced spectral invariants for materials where residual stress is coupled with texture symmetry and electro-elasticity. They employed the components of the preferred direction, Lagrangian electric field, and initial stress in the Lagrangian principal axes [19] to formulate the necessary invariants. Mukherjee and Mandal [20] developed invariant-based strain energy densities where ISS is mingled with fractional powers of Cauchy stretch. They corroborated the model with numerical data for an initially stressed material and solved boundary value problems. They also determined the generalized invariants for initially stressed structurally anisotropic materials. Gower et al. [1] determined a strain energy density by transforming an incompressible neo-Hookean model from a stress-free reference to an initially stressed reference. An interesting feature of this model is that the Cauchy stress and the total strain energy density in the current configuration do not depend on the choice of reference. The stress-free configuration or any initially stressed configuration may be equivalently chosen as the reference configuration to obtain identical results. This condition of reference equivalence has been termed as Initial Stress Reference Independence (ISRI) [2]. Gower et al. [2] further developed two initially stressed compressible neo-Hookean models. Agosti et al. [3] solved another complicated problem to develop an initially stressed Mooney–Rivlin model. These four models [1–3] which satisfy ISRI are applicable to initially stressed isotropic materials. However, the application of ISRI has been limited so far to the cases where structural anisotropy does not exist, and initial stress is the only source of anisotropy. Other existing works on initially stressed structurally anisotropic materials mainly construct invariants of different types, without developing particular strain energy densities that satisfy reference independence. Moreover, there is no limited extensible model available for the initially stressed transversely isotropic materials.
In this paper, we obtain four different models for incompressible initially stressed transversely isotropic materials which involve all standard invariants of transverse isotropy (, , etc.) at the stress-free state. Introducing some of these invariants like require inverting a fourth-order structural tensor to derive the constitutive relation in the presence of initial stress. This inversion is performed by extending the approach of Jog [21]. Limited stretchable material models [22, 23] are advantageous to represent a limited amount of extension and a sharp strain-stiffening near the maximum allowable stretch exhibited by non-crystalline rubbers [22] and biological materials [24]. We deduce the constitutive relation for an initially stressed limited stretchable anisotropic Horgan and Saccamondi [25] material.
Note that we can express the derived energy densities as functions of the spectral invariants [12, 16, 17, 18]. However, in this paper, we are mainly interested to develop the standard invariant-based initially stressed transversely isotropic material models which satisfy reference independence. In the absence of residual stress, the developed strain energy densities reduce to familiar invariant-based strain energy densities [25, 26].
The initially stressed neo-Hookean model has been used to study several problems on structural behavior [27–30], which include stability analysis [27, 28] in the presence of growth [29–31].
Experimental works [32–35] like opening angle method and associated computation and analysis [36] have been used to measure residual stress and strain in various biological organs like layered arteries [32] and heart [33, 34]. Many of these experimental methods calculate initial strain explicitly. Many other approaches [37] obtain initial stress directly. Hence, both initial strain and initial stress based representation of symmetries are advantageous in various cases.
In this work, we investigate both the representations. We first study the initial strain symmetry. Using reference independence of strain energy density, we deduce the relationship of various initial strain measures with material symmetry. Structural sensors are determined for coupled initial strain-structural symmetries. We use these structural tensors to deduce the necessary invariants for various initially strained materials. We also study the polyconvexity of the derived invariants following [38–44] and determine constitutive relation for the initially strained Ogden model.
Next, we investigate the combined initial stress-texture symmetry which is perhaps the more interesting part of the work. We deduce four models for incompressible initially stressed transversely isotropic materials with various levels of intricacy. The first two strain energy functions are linear in left Cauchy Green stretch and its cofactor , respectively. We express all parameters as functions of initial stress and use ISS for both plane and three-dimensional initial strain. We next determine the constitutive relation of a much more general and sophisticated energy function which involves each of the invariants , (in quadratic power), and of in the absence of initial stress. Deducing the strain energy function in the presence of initial stress requires inverting a fourth-order tensor and more involved tensor calculations. Finally, we obtain an initially stressed transversely isotropic LCE model which involves a logarithmic function of the invariant .
We study initial strain symmetry in section 2 and combined initial stress-textural symmetry in section 3. The rest of the paper is organized as follows. In section 2.1, we obtain the relationship between initial strain, symmetry, and structural tensor. Using the derived structural tensors, we determine the invariants required for initially strained isotropic materials in section 2.2 and initially stressed structurally anisotropic materials in section 2.3. In section 2.4, we investigate the polyconvexity of these invariants. In section 2.5, the constitutive relations for the initially strained Ogden model are developed. We next investigate ISS coupled with structural anisotropy in section 3 which may be interesting to many readers. In section 3.1, we obtain the necessary invariants for this material. In section 3.2, we develop a reference-independent strain energy density that is linear in in the stress-free state. We determine the material parameters for both three-dimensional and plane initial strain problems. In section 3.3, we determine a strain energy density that is linear in . A much more complicated strain energy density is developed in section 3.4 which involves inverting a fourth-order tensor. In section 3.5, we determine a strain energy density for the initially stressed transversely isotropic limited extensible model. Some tensor calculations associated with section 3.4 are given in Appendix 2.
2. Initial strain symmetry
In this section, we use initial strain symmetry to model both isotropic and structurally anisotropic initially strained/stressed materials. To this end, some principles of initial stress are used or extended. Hence, we first briefly discuss the basic elements of initial stress in the present section.
Initial stress is a self-balancing stress in the reference configuration, which satisfies
in the same configuration. This initial stress is known as the residual stress when there is no boundary traction in the reference configuration [4, 10, 11]. Symmetry in the presence of residual/initial stress is usually represented by initial/residual stress itself [2, 4]. It can be shown that initial stress satisfies [2, 4, 20]
where is the symmetry group for the initially stressed material. Equation (3) was first obtained by Hoger [4] to the best of our knowledge.
It is possible to obtain similar relations for initial strain as well. The initially stressed configuration can be sliced into small pieces to obtain a stress-free configuration. If this stress-free configuration is isotropic, initial stress would be co-axial with the initial strain calculated from the stress-free configuration. Hence, for an isotropic stress-free configuration, initial strain also satisfies the relation
similar to (3). From this similarity, we can infer that can represent symmetry (for isotropic stress-free state) in the same way is used. In the presence of structural anisotropy, however, and may not be co-axial. In section 2.1, we obtain symmetry representations using different initial strain measures where texture-driven symmetries may be present.
2.1. Evolution of symmetry with the initial strain
In this section, we investigate the transformation of the symmetry group and symmetry tensor due to the initial strain in the reference configuration. Changing the reference configuration changes various strain and stress measures (like Piola–Kirchhoff stress). Consequently, the constitutive relation would also be influenced. However, the total strain energy density in the current configuration must remain unaltered. Hoger [5, 6] and Johnson and Hoger [9] worked on change in constitutive relation for an initially stressed reference configuration. Gower et al. [2] formulated the principle of reference independence of strain energy as ISRI. We apply ISRI to investigate the evolution of symmetry with initial strain. Initial strain/stress often induces anisotropy. On the other hand, modeling an anisotropic material often involves structural tensor or symmetry tensor [26, 38–40, 45]. This structural tensor must be chosen appropriately to represent different symmetries, e.g., for transversely isotropic materials, we choose where is the preferred direction, and for isotropic materials, we can simply choose where all directions are preferred directions. In this section, we determine the evolution of this symmetry tensor as well as the symmetry group with initial strain.
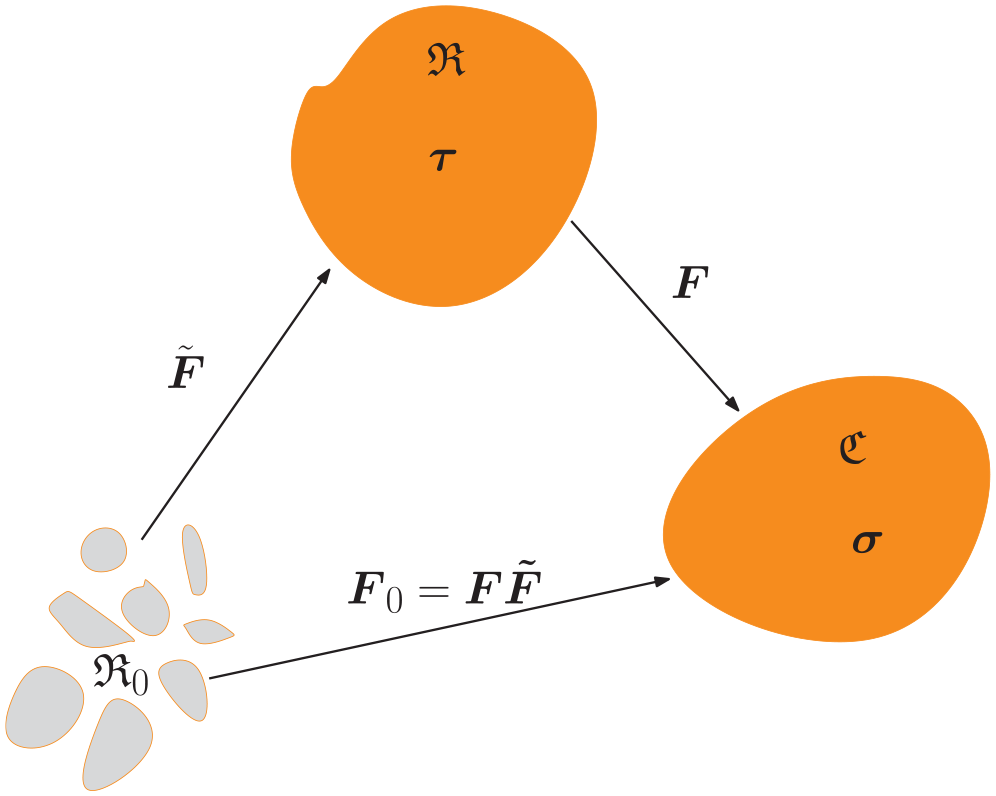
At this point, we define a three-configuration system shown in Figure 1 denoted by , , and , respectively. The configuration undergoes a deformation to obtain the initially stressed/strained reference , which further undergoes a deformation with gradient to generate the current configuration . In the configuration , initial stress appears due to the initial deformation gradient . We use both and as reference configurations alternately, while is chosen as the current configuration. As shown in Figure 1, the current configuration can be obtained by applying a deformation gradient to the configuration .
The stress-free configuration , initially stressed configuration , and current configuration .
When is chosen as the reference, we denote the strain energy function in the current configuration as , the symmetry group as , and the structural tensor as . On the other hand, for the initially strained reference , the strain energy function in the configuration is denoted by , the symmetry group is , and the structural tensor is . Now, we determine the relationship between , , and , , by applying reference independence of strain energy density.
Strain energy is a function of the deformation gradient and structural tensor. For the above two choices of reference configuration, we express strain energy as the functions and , respectively. From ISRI [2], we infer that the strain energy density in the current configuration should be independent of the chosen reference. Hence, we equate the two above strain energies per unit volume in as
where and . Since is the symmetry group for , the strain energy density must satisfy the following:
Equation (5) appears from the definition of the symmetry group, as given in equation (28) of Ogden [26]. On the other hand, the symmetry group of should satisfy the following:
Using equation (4), we transform both sides of equation (6) from reference to followed by cancelling from both sides to obtain the following:
Symmetry groups and are defined as the group of orthogonal tensors and which satisfy equations (5) and (6). Thus, we observe that this symmetry group can be transformed from one configuration to another using .
We next study whether other initial strain tensors can also perform the required transformation of symmetry group. Since the inverse of each element of or must belong to the same group, we have
Hence, and should also belong to and , respectively. The relationship between and is obtained by transposing equations (8a) and (8b) and substituting as follows:
Since equation (10) holds for all orthogonal transformation and , we conclude that can also be used to transform the symmetry groups for change of reference.
We note here that although is orthogonal, in equation (8a) may not always remain orthogonal for all choices of as discussed in Appendix 1. In those cases, we conclude that the associated symmetry is annihilated by the action of initial strain/stress. In other words, initial stress/strain introduces anisotropy. So far, we have studied the transformation of the symmetry group by initial strain. Due to this transformation, the symmetry tensor also needs to be transformed which we study next.
The second-order symmetry tensors or structural tensors and satisfy the following relations:
Substituting equation (8b) in equation (11), we obtain the following:
Similarly, by substituting equation (10b) in equation (11) and simplifying we obtain the following:
Equations (14) and (15) provide two different transformation rules for the structural tensors which can be used for modeling initially strained materials. If the reference is isotropic, we can consider . Consequently, the structural tensor for initially strained material is either
On the other hand, for the transversely isotropic reference configuration
where is the preferred direction of transverse isotropy. We note that and are same in dimension and both represent a strain measures and its components. The same similarity can be observed in the structural tensors based on the cofactor of strain components. A similar approach can be used for transforming various crystallographic motivated structural tensors for general anisotropies [39] to the initially strained reference. The fourth-order structural tensors and for reference and satisfy the relation
Thus, we can transform the second- and fourth-order structural tensors from the reference to reference using and/or .
These structural tensors are used in sections 2.2 and 2.3 to derive the required invariants for different initially strained materials.
2.2. Strain energy density for initially strained isotropic materials
In the previous section, the structural tensors were derived using initial strain symmetry for isotropic or anisotropic behaviors in configuration . In this section, we derive the invariants required to construct strain energy density using these structural tensors for initially strained isotropic materials. Equation (16), shows two symmetry/structural tensors and , respectively, if the stress-free configuration is isotropic. Using these two structural tensors, we model the initial strain-induced anisotropy in this section.
Strain energy functions for anisotropic materials are usually expressed in the form [26]. These strain energy functions can also be equivalently expressed in the form [38, 42] of
where and are two strain tensors and is the symmetry tensor. However, in the present case, we have two symmetry tensors given in equation (16). Hence, we express the strain energy density in the current configuration for the initially strained reference using two symmetry tensors and and two strain measures and as follows:
Note that it is also customary [38, 42] to decompose an anisotropic strain energy density as
for simplification. We also want to simplify equation (19) in the same manner. In our case, since the symmetry tensor and the strain tensor have identical forms, they are compatible with each other, while and are similarly compatible. Due to this compatibility, we use the following additive decomposition to simplify the strain energy density as follows:
Now we investigate the necessary invariants to express . Note here that if we substitute with and with , for any proper orthogonal transformation the total deformation gradient from to is preserved. Hence, these substitutions do not alter the current configuration , and (combining the two sentences into one) the total strain energy density of the current configuration remains unaffected. However, the above substitutions transform and . By incorporating these transformation in the form of the unaffected strain energy, we obtain the following:
It generally requires 10 invariants [46, 47] to represent a scalar function of two second-order symmetric tensors which satisfies equation (22). However, using the equivalence of the forms of symmetry tensor and the strain tensors , we reduce the number of required invariants. Note that is a Lagrangian measure of strain which the configuration would undergo due to deformation . On the other hand, is an Eulerian measure of strain that the configuration has undergone during the deformation . Both the strains are measured from the same configuration . They have equivalent forms. Hence, it is reasonable to consider that and should have the same contribution in all invariants. Only 2 among the 10 standard [46, 47] satisfy the above conditions, which are
and the volumetric energy density which depends on .
Applying similar arguments for , we can derive the two required invariants as
along with compressible counterparts.
Among the four invariants , , , and given in equations (23)–(25), we observe that and reduce to standard invariants and of when . They are also the first and second invariants of . Hence, we use these two invariants of to construct the incompressible part of strain energy density of an initially strained material as
The Cauchy stress tensor, in this case, can be obtained as follows:
Various invariants of like can be expressed in terms of and using representation theorem.
We would observe in section 2.5 that the strain energy density for initially strained Ogden model can be expressed using or where or appear as symmetry tensors for initial strain, and is any arbitrary real number.
We observe here that the standard invariants of like , usually do not appear for initial strain symmetry, since they are not functions of . Further note that all the suitable invariants derived in this section remain unaffected by the exchange of strain and symmetry. Consequently, the strain energy density should also be symmetric under the exchange of the strain measure and the associated symmetry. The exchange of and as well as and should keep the energy functional invariant, i.e.,
It is very interesting to find such an energy density that is always invariant under the exchange of strain and symmetry. This kind of behavior which we observe for initial strain symmetry is quite unusual among anisotropic materials.
Here, we derived the required invariants for initially strained isotropic materials and determined the form of strain energy densities. In section 2.3, we obtain the strain energy densities for an initially strained anisotropic material where structural anisotropy in the reference is represented by a second-order structural tensor.
2.3. Strain energy for initially strained transversely isotropic materials
In the previous section, we developed the strain energy densities for initially strained isotropic materials. Biological tissues often involve texture-driven symmetries. It is quite complicated to combine the effects of initial stress/strain with texture symmetry, which is our interest in this section. The texture symmetries found in triclinic, monoclinic, rhombic, and transversely isotropic materials can be completely represented by second-order structural tensors [39]. These second-order structural tensors follow the transformation rule given in equation (14) under initial strain. In this section, we derive the invariants of initially strained transversely isotropic materials using equation (17). The same derivation is applicable for all the above symmetries.
In this section, we assume that the configuration is transversely isotropic. From equation (17), we observe that a combination of the structural tensors , , , and can represent the symmetry in the initially strained configuration . The resulting strain energy with the coupling of initial strain and transverse isotropy can be given as
which is decomposed with the same motive of decomposing equation (21). Once again, we note that replacing with and with do not change the strain energy which gives the following:
A similar condition is also applicable for , which is not shown here for brevity.
First, we consider the formulation of the energy function in equation (30). As mentioned in section 2.1, the structural tensors and are equivalent Eulerian strain measures, equivalent to the Lagrangian strain tensor .
Hence, following the explanation given in section 2.2, the weightage/contribution of in an invariant should be the same as the combined weightages of the two structural tensors and . Similarly, the weightage of in should be same as the combined weightage of and . The above condition is satisfied by the following set of invariants
to construct the strain energy density . Note that we can also apply the invariant
instead of the invariant in equation (32). The invariant is important to ensure polyconvexity of the energy.
We observe in equation (32) that each structural tensor appears with an equal weight of right Cauchy stretch to constitute the above invariants. Furthermore, these invariants also satisfy symmetry under exchange of strain tensor with pairing structural tensors, e.g.,
Substituting and in equations (32) and (33), some of the above invariants can be expressed as follows:
For a strain energy density formed with invariants , , , and , Cauchy stress in the configuration is given by the following:
Thus, we obtain constitutive relations using initial strain symmetry. Using the derived invariants , , , , , we can constitute various strain energy densities, e.g.,
where , , , , , are the material parameters associated with the strain energy functions; we keep using the symbol for notional convenience. In this section, we obtain the necessary invariants and propose some strain energy functions for the initially strained transversely isotropic materials. Many of these energy functions satisfy the polyconvexity condition, which we show in the next section.
2.4. Polyconvexity of initially strained invariants
In this section, we study the polyconvexity of the invariants proposed in sections 2.2 and 2.3. We show that the invariants (equation (23a)), (equation (24)), (equation (32a)), (equation (33)) are polyconvex while , , etc. are not. Using Fréchet derivative of the invariants, we can show that
where is any tensor in three dimensions since is a positive definite tensor. Similar steps ensure that
Furthermore, we have
Equations (43)–(46) ensure polyconvexity of the invariants , , , and . We can use the same approach to further show that invariants , , etc. are not polyconvex. Note that in the absence of initial strain, reduces to which is not convex [48, 49].
So far we have developed various invariant-based energy functions for initially strained materials. We next determine the strain energy function for invariant-free incompressible Ogden material in the presence of initial strain.
2.5. Initially strained Ogden model
Ogden strain energy density [50] for incompressible materials is expressed in terms of principal stretches, usually not as a function of the invariants and . Due to its invariant-free form and arbitrary exponent, it is difficult to obtain the strain energy density for the initially strained Ogden model. We derive the intended strain energy density, in this section, using both the symmetry tensors and .
For an isotropic stress-free reference , the Ogden strain energy function is given in terms of principal stretches as
for incompressible materials. It is possible to express equation (47) using the invariants of as well as the invariants of .
First, we express this energy function in terms of the invariants of given by the following:
We first consider that is a positive even number , where the exponent is a positive integer. Using the relation , we obtain the following:
A trace of equation (50) can be simplified in the following form:
Substituting equation (51) in equation (48), the initially strained Ogden model can be expressed with the reference as follows:
Note, however, that equation (51) is valid for a positive integral value of . Next, we derive the energy density when the exponent is not necessarily positive or integral. We have
Similar to this equality of the first invariants, we can show that all invariants of and are identical. Hence, their eigenvalues obtained by solving the same characteristic equations must be the same. As a result of the above, the eigenvalues of are identical to the eigenvalues of for all possible exponents . Consequently, their traces must be equal, i.e.,
for any real exponent . The resulting strain energy density with initial strain symmetry thereby takes the same form as equation (52). This expression satisfies the symmetry of invariants under the exchange of strain and structural tensor discussed in section 2.2. Note that the invariant in equation (52) involves in a similar way structural tensors are inserted in an anisotropic invariant in sections 2.2 and 2.3. Hence, can indeed be considered a structural tensor as we did in the previous sections.
Next, we express the energy function for Ogden model in terms of the invariants of given by
since for an incompressible material. The approach used to obtain equation (53) is used next to determine the form of strain energy density for the initially stressed Ogden model, given by
where is used as the structural tensor for initial strain symmetry.
In the present section, we obtain energy densities (52) and (56), in terms of structural tensors and which involve initial strain symmetry and arbitrary exponents. This energy function satisfies various physical conditions discussed in section 2.2.
Thus, we have derived strain energy densities for various invariant-based and invariant-free initially strained materials. In this paper, however, our main interest here is to model the initially stressed texturally anisotropic materials which we investigate next in section 3.
3. A coupled initial stress-texture-driven symmetry
This section models the material response for a combination initial stress and texture driven symmetry. We deduce sophisticated strain energy potentials which involves the invariants and with as the preferred direction in the absence of initial stress. We derive the strain energy function for an initially stressed limited stretchable material and other anisotropic materials. The constitutive models for these initially stressed structurally anisotropic materials require intricate analysis which we work out in this section. To derive these models, we invert a fourth-order tensor by extending the approach used by Jog [21].
We have observed that both initial stress and initial strain can represent symmetry when the material is isotropic in the absence of initial stress. Gower et al. [1] expressed strain energy density completely in terms of ISS for an initially stressed isotropic neo-Hookean material. Gower et al. [2] derived two more energy densities for initially stressed compressible neo-Hookean materials. Agosti et al. [3] derived initially stressed incompressible Mooney–Rivlin material through a mathematically involved calculation. Introducing the invariant appears very tricky for introducing ISS.
However, combining initial stress with texture symmetry involves a number of additional anisotropic invariants and challenging calculations, which is our present interest. The strain energy density in this case would be a function . We first obtain the required invariants for an incompressible initially stressed structurally anisotropic material in section 3.1. Thereafter, in sections 3.2–3.5, we derive four different incompressible material models for initially stressed structurally anisotropic materials. In sections 3.2 and 3.3, we derive incompressible initially stressed structurally anisotropic materials satisfying reference independence which are linear in and , in the stress-free configuration. For instance, in section 3.2, we employ strain energy functions linear in and . We derive the material parameters completely for both three-dimensional and plane initial strain problems. An important phenomenon we observe in sections 3.2 and 3.3 is that initial stress can completely define the symmetry irrespective of the texture-induced anisotropy. It can also induce isotropy in an otherwise anisotropic material. In section 3.4, however, we are interested in a much more sophisticated strain energy density. We derive an initially stressed energy function which include contributions of each of the invariants , , and in the absence of initial stress. We choose the quadratic power of in this energy function. In section 3.5, we determine an initially stressed transversely isotropic LCE Gent-like model. In the absence of initial stress, it represents the model developed by Horgan and Saccomandi [25]. This strain energy density contains logarithmic function of the invariant . Applying ISS to such cases is quite intricate. For example, we invert a fourth-order tensor and perform many involved tensor calculations to derive the energy density in section 3.4.
3.1. Invariants for initially stressed anisotropic materials
In this section, we obtain the required invariants for initially stressed structurally anisotropic materials. Using ISRI [2], it can be shown that strain energy density must satisfy the following equality:
The standard invariants which satisfy equation (57) for incompressible materials are the following:
Some other invariants for initially stressed structurally anisotropic materials which satisfy equation (57) are
etc. A strain energy function for initially stressed anisotropic materials should comprise the above invariants (58) and (59). However, depends on initial deformation (Section 2.1). Hence, we may need to obtain this symmetry tensor explicitly in terms of initial stress. In the next sections, we determine a number of example strain energy functions for initially stressed incompressible anisotropic materials.
3.2. Representation for an anisotropic strain energy linear in using an initially stressed reference
In the previous section, we obtained necessary invariants for initially stressed transversely isotropic materials. Now, we develop a few strain energy functions satisfying ISRI [2] and ISS [1] for the materials where anisotropy is induced by both initial stress and material microstructures.
In this section, we choose the initially strained energy function
proposed in equation (39), where . In the absence of initial strain, (60) assumes the following form:
The tensors and represent initial strain symmetry in the energy function (60). Our goal in this section is to express the strain energy density using ISS which we do next. The initial stress compatibility condition states that initial stress is the same as the Cauchy stress in the reference configuration. Hence, we calculate initial stress as
where is the Lagrange multiplier in the reference configuration. Equation (62) can be rewritten as follows:
Note that the strain energy density includes initial stress as the symmetry tensor. However, the Lagrange multiplier remains as a parameter that needs to be expressed in terms of initial stress . This is done by calculating the determinant of both sides of equation (63). The determinant of the left-hand side is simplified as follows:
Substituting the incompressibility condition in equation (67), we obtain
In the coordinate system formed by the orthonormal system of basis vectors , the tensor is expressed as
whose determinant is . Hence, can be calculated from the following equation:
By expanding the right-hand side of equation (70) as a cubic polynomial in terms of , we rewrite equation (70) as follows:
for , . Similar solutions for cubic equations are given in Gower et al. [1] for initially stressed isotropic materials.
We further consider the case of plane initial strain where the plane of initial strain is perpendicular to a unit direction . The projection of initial stress in this plane is given by
The determinant of is given by where and are the trace and determinants of the projection of on plane of initial strain. On the other hand, considering for plane strain case, the determinant of the right-hand side of equation (73) is obtained as
Substituting in the right-hand side of equation (75) and simplifying, we obtain the following:
Using equations (73)–(76), we obtain the following quadratic equation in terms of :
The quadratic equation (77) can be easily solved to calculate in terms of initial stress and structural anisotropy. Note that the right-hand side of equation (77) becomes if , and it becomes if .
In this section, we developed a strain energy function that satisfies ISRI for stress-induced and texture-induced anisotropy. Particularly, we consider texture induced transverse isotropy. Using the same approach, we can also determine the strain energy function and the relevant parameter for other kinds of structural anisotropies.
The strain energy density developed in this section is linear in . In the next section, we derive ISS for an energy function that is linear in .
3.3. Representation for an anisotropic strain energy linear in using an initially stressed reference
In this section, we obtain ISS for a strain energy density linear in which is expressed as
where . The invariants in equation (78) are derived in sections 2.2 and 2.3. We can further simplify equation (78) as follows:
The Cauchy stress can be obtained for the energy density (78), using the stress conjugate of . For an incompressible material, is equivalent to Lagrangian strain measure [19]. Using the relation between the Cauchy stress and the stress conjugate of [19], we obtain the following:
Initial stress compatibility [1] states that initial stress is same as the Cauchy stress in the reference configuration. Consequently, by substituting in equation (80), we obtain the following:
From equation (81), we have , which we further substitute in equation (79) to express the strain energy density as
where can be determined from the determinant of equation (81) using the same approach employed in equations (66)–(77).
In the present section, we obtain strain energy densities using ISS. It can be observed that the only symmetry tensor present in the energy functions (65) and (82) is the initial stress . The structural anisotropy characterized by or does not appear in these energy densities, and consequently does not influence the resulting symmetry. The scalar parameter which depends on does not govern the symmetry. Hence, the symmetry of these initially stressed energy functions can be completely determined using initial stress . If initial stress is hydrostatic in nature, the energy densities (65) and (82) satisfy the following:
The resulting symmetry of the material will be isotropic irrespective of the texture-driven symmetry. Hence, if the principal initial stress components are equal, it induces isotropic response exhibited by an orthotropic material. The same phenomenon can be observed for other kinds of anisotropies as well. A uniaxial or equi-biaxial initial stress would introduce transverse isotropy independently of the symmetry exhibited in the stress-free configuration. Based on the coalescence of principal initial stress components, the resulting symmetry can be isotropic, transversely isotropic, or orthotropic in these cases. The preferred directions of this initial stress-induced transverse isotropy, however, do not depend on the structural preferred directions any longer and depend completely on initial stress.
In sections 3.4 and 3.5, we consider much more general forms for the strain energy density functions which are not linear in of . In the presence of initial stress, these energy densities depend on many more invariants of which we obtained in section 3.1. The associated symmetry is more intricate.
3.4. A more general initially stressed structurally anisotropic energy density
In this section, we develop a sophisticated and general structurally anisotropic strain energy density with ISS. Deducing this energy density requires an inversion of a fourth-order tensor as well as many involved tensor calculations which we show next. Some tensor calculations are also given in Appendix 2.
In terms of initial strain symmetry, the chosen incompressible energy function is given by
where the invariants , , and have been developed in equations (23) and (37) based on initial strain symmetry. Note here that in the absence of initial strain, the energy (84) takes the form
which is quadratic in and linear in .
We can obtain the Cauchy stress from the energy function (84) as
By substituting in the constitutive relation (86), we obtain initial stress as follows:
Note that the term is same as the unknown invariant given in equation (59).
Initial strain symmetry appears in the energy function (84) due to the presence of initial strain tensor . To introduce ISS in the strain energy function (84), we first need to replace with a function of initial stress . To express initial left Cauchy stretch in terms of , we rewrite equation (87) as
Here, we define , where , , are second-order tensors. The left-hand side of equation (88) involves a fourth-order tensor which is premultiplied to . This fourth-order tensor
will now be inverted in order to solve from equation (88).
We extend the approach used by Jog [21] for this inversion. To this end, we choose a set of orthonormal basis one of which is aligned with , such that . The projections are defined as [21] which satisfy the following:
The above properties (90) can be used to invert a fourth-order tensor as follows:
More properties of the projection tensors can be found in [21]. Different terms of equation (89) can be expressed using the projection tensors as follows:
Substituting the relations (92) in equation (89), we obtain
where . Substituting equation (97) in equation (84) with some simplification, we obtain the intended strain energy from a stressed reference given by
which involves the invariants , , , , , , etc. defined in equations (58) and (59) in section 3.1. To obtain the strain energy density in the form equation (98), we employed a number of identities like
etc. mainly using the properties of diodic product: for the vectors , , , and . The invariant in equation (98) can also be expressed in terms of standard invariants using Cayley–Hamilton theorem.
Note, however, that the strain energy density (98) involves unknown scalar quantities and which need to be determined in terms of residual stress invariants. To this end, we compute the determinant of both sides of equation (88) in Appendix 2 to obtain
where . Using equation (101), the unknown coefficient should be expressed in terms of initial stress invariants. However, equation (101) also involves initial strain invariants and . We need an additional equation to evaluate . From the geometrical interpretation of the Green Almansi strain measure and the definition of in Section 2.3, we know that provides the square of unit length in the preferred direction of the stress-free configuration. Using equation (97), this equation can be simultaneouly solved with equation (101) to obtain and .
To further evaluate in terms of , and initial stress invariants, we multiply both sides of equation (88) by and obtain trace on both sides as follows:
Some tensor identities required to obtain equation (103) are provided in Appendix 2. Equations (101) and (103) can be simultaneously solved to express and in terms of initial stress invariants.
In this section, we deduced a very general complex strain energy density for initially stressed transversely isotropic materials. Energy functions of these kinds are quite useful in biomechanics [26]. Moreover, the general form of this energy function states that it is also possible to extend this approach to derive initially stressed energy density for many more sophisticated structurally anisotropic functions available in the literature. In section 3.5, we obtain an initially stressed LCE model for fiber-reinforced incompressible nonlinearly elastic solids [25].
3.5. Initially stressed transversely isotropic Gent-like model
LCE models [22–24] are useful to capture limited elastic behaviors and rapid strain- stiffening exhibited by crystalline rubbers [22] and biological materials [24]. Gent [22] proposed one of the first LCE models for isotropic materials. A popular limited elastic strain energy density for fiber-reinforced stress-free solids developed by Horgan and Saccomandi [25] is given by
where , are material parameters and is the stiffening parameter. In this section, we develop an initially stressed LCE model for which equation (104) represents the energy density in the stress-free reference configuration. In an initially strained configuration, this strain energy density is given as follows:
Invariants used in equation (105) were developed in equations (23) and (37), respectively. Note that in equation (105) is given as which is equivalent to for a stress-free reference in equation (104). The goal of this section is to represent the strain energy potential (105) in terms of initial stress. The associated expression of Cauchy stress is given as follows:
From initial stress compatibility, the expression of initial stress given from equation (105) is as follows:
Equation (109) is the strain energy density for the initially stressed transversely isotropic Gent model. The invariants , , , etc. have been developed in equations (58) and (59). The unknown can be expressed in terms of initial stress invariants using the equation:
where , . Relation (110) is developed by taking a determinant of both sides of equation (108) and substituting . The quantity can be determined from the relation as explained in Section 3.4.
4. Conclusion
In this paper, we study constitutive relations for both initially stressed and initially strained structurally isotropic and anisotropic materials.
First, we determine the initial strain measures to represent symmetry. This study includes the cases when initial strain symmetry is mingled with structural anisotropies. We observe that both initial deformation gradient and its cofactor can be used to transform structural tensor from a given configuration to the initially stressed/strained configuration. Corresponding structural tensors are determined. These structural tensors are used to develop necessary invariants. Initially strained Ogden model involves the derived structural tensors and shows the expected invariance under exchange of strain and symmetry. Many of these invariants exhibit polyconvexity.
Next, we develop four initially stressed texturally anisotropic material models which satisfy reference independence. For some of these models, which are linear in or , initial stress alone regulates the material symmetry. However, the last two models involve invariants that depend on both initial stress and texture symmetry. One of these two models involves all the standard invariants for transverse isotropy in the absence of initial stress. The approach developed in this paper can be directly applied to obtain constitutive relation for any initially stressed transversely isotropic material, when the stress-free reference is characterized by the more complicated exponential energy functions like the Holzapfel–Ogden model [35], other -based energy densities, or the energy densities formed using spectral invariants. The strain energy densities developed in this paper can also be expressed in invariant-free forms (of spectral invariants) [12, 16, 18]. This work also presents a methodology to invert the constitutive relation for transversely isotropic materials. We develop the first limited extensible model for transverse isotropy satisfying ISS.
Footnotes
Appendix 1
Appendix 2
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
ORCID iD
Soumya Mukherjee
References
1.
GowerALCiarlettaPDestradeM.Initial stress symmetry and its applications in elasticity. Proc R Soc A Math Phys Eng Sci2015; 471(2183): 20150448.
2.
GowerALShearerTCiarlettaP.A new restriction for initially stressed elastic solids. Q J Mech Appl Math2017; 70(4): 455–478.
3.
AgostiAGowerALCiarlettaP.The constitutive relations of initially stressed incompressible Mooney-Rivlin materials. Mech Res Commun2018; 93: 4–10.
4.
HogerA.On the residual stress possible in an elastic body with material symmetry. Arch Ration Mech Anal1985; 88(3): 271–289.
5.
HogerA.The constitutive equation for finite deformations of a transversely isotropic hyperelastic material with residual stress. J Elast1993; 33(2): 107–118.
6.
HogerA.Positive definiteness of the elasticity tensor of a residually stressed material. J Elast1994; 36(3): 201–226.
7.
HogerA.The elasticity tensor of a transversely isotropic hyperelastic material with residual stress. J Elast1996; 42(2): 115–132.
8.
JohnsonBEHogerA.The dependence of the elasticity tensor on residual stress. J Elast1993; 33(2): 145–165.
9.
JohnsonBEHogerA.The use of a virtual configuration in formulating constitutive equations for residually stressed elastic materials. J Elast1995; 41(3): 177–215.
10.
ShamsMDestradeMOgdenRW.Initial stresses in elastic solids: constitutive laws and acoustoelasticity. Wave Motion2011; 48(7): 552–567.
11.
OgdenRSinghB.Propagation of waves in an incompressible transversely isotropic elastic solid with initial stress: biot revisited. J Mech Mater Struct2011; 6(1): 453–477.
12.
ShariffMHBMBustamanteRMerodioJ.On the spectral analysis of residual stress in finite elasticity. IMA J Appl Math2017; 82(3): 656–680.
13.
JhaNKReinosoJDehghaniH, et al. Constitutive modeling framework for residually stressed viscoelastic solids at finite strains. Mech Res Commun2019; 95: 79–84.
14.
JhaNKMerodioJReinosoJ.A general non-local constitutive relation for residually stressed solids. Mech Res Commun2019; 101: 103421.
15.
FontAJhaNKDehghaniH, et al. Modelling of residually stressed, extended and inflated cylinders with application to aneurysms. Mech Res Commun2021; 111: 103643.
16.
ShariffMHBMBustamanteRMerodioJ.A nonlinear constitutive model for a two preferred direction electro-elastic body with residual stresses. Int J Non Linear Mech2020; 119: 103352.
17.
ShariffMHBMBustamanteRMerodioJ.A nonlinear electro-elastic model with residual stresses and a preferred direction. Math Mech Solids2020; 25(3): 838–865.
MukherjeeSMandalAK.A generalized strain energy function using fractional powers: application to isotropy, transverse isotropy, orthotropy, and residual stress symmetry. Int J Non Linear Mech2021; 128: 103617.
21.
JogCS.Derivatives of the stretch, rotation and exponential tensors in n-dimensional vector spaces. J Elast2006; 82(2): 175.
22.
GentAN.A new constitutive relation for rubber. Rubber Chem Technol1996; 69(1): 59–61.
23.
HorganCO.The remarkable gent constitutive model for hyperelastic materials. Int J Non Linear Mech2015; 68: 9–16.
24.
HorganCOSaccomandiG.A description of arterial wall mechanics using limiting chain extensibility constitutive models. Biomech Model Mechanobiol2003; 1(4): 251–266.
25.
HorganCOSaccomandiG.A new constitutive theory for fiber-reinforced incompressible nonlinearly elastic solids. J Mech Phys Solids2005; 53(9): 1985–2015.
26.
OgdenRW.Nonlinear elasticity, anisotropy, material stability and residual stresses in soft tissue. In: HolzapfelGAOgdenRW (eds) Biomechanics of soft tissue in cardiovascular systems. Berlin: Springer, 2003, pp. 65–108.
27.
CiarlettaPDestradeMGowerAL, et al. Morphology of residually stressed tubular tissues: beyond the elastic multiplicative decomposition. J Mech Phys Solids2016; 90: 242–253.
28.
CiarlettaPDestradeMGowerAL.On residual stresses and homeostasis: an elastic theory of functional adaptation in living matter. Sci Rep2016; 6: 24390.
29.
DuYLüCChenW, et al. Modified multiplicative decomposition model for tissue growth: beyond the initial stress-free state. J Mech Phys Solids2018; 118: 133–151.
30.
DuYLüCDestradeM, et al. Influence of initial residual stress on growth and pattern creation for a layered aorta. Sci Rep2019; 9(1): 1–9.
31.
DuYLüCLiuC, et al. Prescribing patterns in growing tubular soft matter by initial residual stress. Soft Matter2019; 15(42): 8468–8474.
32.
HolzapfelGAOgdenRW.Modelling the layer-specific three-dimensional residual stresses in arteries, with an application to the human aorta. J R Soc Interface2010; 7(46): 787–799.
33.
OmensJHFungYC.Residual strain in rat left ventricle. Circ Res1990; 66(1): 37–45.
34.
CostaKDMay-NewmanKFarrD, et al. Three-dimensional residual strain in midanterior canine left ventricle. Am J Physiol Heart Circ Physiol1997; 273(4): H1968–H1976.
35.
HolzapfelGAOgdenRW.Constitutive modelling of arteries. Proc R Soc A Math Phys Eng Sci2010; 466(2118): 1551–1597.
36.
WangHMLuoXYGaoH, et al. A modified Holzapfel-Ogden law for a residually stressed finite strain model of the human left ventricle in diastole. Biomech Model Mechanobiol2014; 13(1): 99–113.
37.
LiGGowerALDestradeM.An ultrasonic method to measure stress without calibration: the angled shear wave method. J Acoust Soc Am2020; 148(6): 3963–3970.
38.
L SchröderJNeffPEbbingV. Polyconvex energies for trigonal, tetragonal and cubic symmetry groups. In: IUTAM symposium on variational concepts with applications to the mechanics of materials, Bochum, 22–26 September 2008, pp. 221–232. Berlin: Springer.
39.
SchröderJNeffPEbbingV. Anisotropic polyconvex energies on the basis of crystallographic motivated structural tensors.s J Mech Phys Solids2008; 56(12): 3486–3506.
40.
EbbingVSchröderJNeffP.Construction of polyconvex energies for non-trivial anisotropy classes. In: SchröderJNeffP (eds) Poly-, quasi-and rank-one convexity in applied mechanics. Berlin: Springer, 2010, pp. 107–130.
41.
EbbingV.Design of polyconvex energy functions for all anisotropy classes. Duisburg: University of Duisburg-Essen, 2010.
42.
ItskovMEhretAEMavrilasD.A polyconvex anisotropic strain–energy function for soft collagenous tissues. Biomech Model Mechanobiol2006; 5(1): 17–26.
43.
SchröderJNeffP.Invariant formulation of hyperelastic transverse isotropy based on polyconvex free energy functions. Int J Solids Struct2003; 40(2): 401–445.
44.
BalzaniDNeffPSchröderJ, et al. A polyconvex framework for soft biological tissues. adjustment to experimental data. Int J Solids Struct2006; 43(20): 6052–6070.
45.
SpencerAJM. Part III. theory of invariants. Contin Phys1971; 1: 239–353.
46.
ZhengQS.Theory of representations for tensor functions–a unified invariant approach to constitutive equations. Appl Mech Rev1994; 47: 545–587.
47.
RivlinRS.Further remarks on the stress-deformation relations for isotropic materials. In: RivlinRSBarenblattGI (eds) Collected papers of RS Rivlin. Berlin: Springer, 1997, pp. 1014–1035.
48.
MerodioJOgdenRW.Instabilities and loss of ellipticity in fiber-reinforced compressible non-linearly elastic solids under plane deformation. Int J Solids Struct2003; 40(18): 4707–4727.
49.
MerodioJNeffP.A note on tensile instabilities and loss of ellipticity for a fiber-reinforced nonlinearly elastic solid. Arch Mech2006; 58(3): 293–303.
50.
OgdenRW.Large deformation isotropic elasticity–on the correlation of theory and experiment for incompressible rubberlike solids. Proc R Soc A Math Phys Eng Sci1972; 326(1567): 565–584.