Starting from three-dimensional linear elasticity and performing the dimensional reduction by integration over the thickness, we derive a general form of the areal strain energy density for elastic shells. To obtain the new constitutive model, we do not approximate the deformation fields as polynomials in the thickness coordinate, but rather we keep all terms in the thickness-wise series expansions. As a result, we deduce the explicit form of the shell strain energy density in which the constitutive coefficients are expressed as integrals depending on the thickness h and on the initial curvature. Then, to obtain the shell model of order , we expand the integral coefficients in the strain energy function as power series of h and truncate them to the power . In the case , we recover the classical strain energy density for combined bending and stretching of linear shells, which leads to the Koiter model. Finally, we prove that the proposed shell strain energy function is coercive for any , as well as for the general case .
The theory of shells is a special chapter of continuum mechanics which investigates the deformation of thin (shell-like) solids. One of the main tasks of shell theory is to establish an appropriate two-dimensional model for such problems, in which the field equations depend on two spatial variables (usually the curvilinear coordinates on the midsurface). These equations should be simple enough to be amenable for practical applications, but also should capture the important features of shell deformation, such as transverse shearing and drilling rotations. Accordingly, there exist several linear and nonlinear models for elastic shells in the literature, having various complexity degrees; some of them are classical and keep only the leading order terms, whereas others are more refined and generalized.
As mentioned in the work by Ball [1], the problem of deriving approximate two-dimensional models from the three-dimensional elasticity to describe the behavior of shells is one of the open problems of elasticity theory. In the past decades, this problem was approached using asymptotic analysis and sharp convergence tools (such as Gamma convergence) by many authors [2, 3, 4, 5]. However, these methods were able to justify the already known pure membrane equations and the inextensional bending equations separately, but they have not given results for a coupled membrane-bending model in general. On the other hand, starting from the three-dimensional elasticity and using a derivation procedure based on integration over the thickness, Steigmann [6] obtained an elastic shell model combining both membrane and bending effects. This general derivation procedure was presented systematically for various shell models by Steigmann [6, 7, 8]; it relies on a thickness-wise expansion of the strain energy and of the deformation field truncated at third order, see an extensive account in the work by Steigmann et al. [9].
One of the research directions for improving the shell model is to consider higher-order models, i.e., models of order with . The higher-order shell models are expected to be more accurate for shells with moderate thickness . In this case, the terms of order , can play a significant role (they are no longer negligible) and should be taken into account. In our paper, we follow this line of thought; we employ the derivation procedure presented previously by Steigmann [6, 7, 8] to obtain a general linear shell model of order with . We focus our attention to deduce the respective form of the areal strain energy density for elastic shells, since all other field equations (geometrical relations, balance equations, etc.) have the same form as in the classical linear shell theory. To obtain such a constitutive model, we do not express the displacement vector or the three-dimensional strain energy density as polynomial functions of the thickness coordinate, i.e., we do not truncate the thickness-wise Taylor expansions of these fields. Instead, we retain all the terms in these series expansions with respect to the thickness coordinate. As a result, we obtain the explicit form of the areal strain energy density for shells, in which the coefficients are expressed as integrals depending on the thickness and on the initial curvature of the midsurface. Subsequently, we can write the strain energy density of order , provided that we expand the integral coefficients as power series of and keep only the terms up to the power . Using some approximations and assumptions for shells (such as the assumption of zero normal stress), we simplify the expressions and reduce the new constitutive model to a relatively simple explicit form. To show that the proposed shell model is well posed, we prove that the energy function is coercive for all values of , as well as for . The coercivity of the strain energy function is an important property, since it plays a central role in the proof of existence results for shell equations.
We mention that for we recover the corresponding strain energy density for classical linear elastic shells, which reduces under well-known assumptions to the linear Koiter model. Thus, our shell energy function can be seen as a refinement and generalization of the classical linear shell model. We remark that one can find in the literature some proposed shell energy functions of order . For instance, in the case of plates, a potential energy of order is considered in the work by Pruchnicki [10]. For geometrically nonlinear Cosserat elastic shells (or six-parameter shells), the models of order and have been presented in the work by Bîrsan and colleagues [11, 12, 13] and have been analyzed in matrix notation in the work by Ghiba et al. [14, 15], where the existence of minimizers has been proved. Other approaches to higher-order shell models, including also numerical treatment, have been presented in the previous works [16, 17, 18], among others.
1.1. Outline of the paper
In Section 2, we present briefly the geometrical and kinematical relations for linear elastic shells, including the differential geometry of the reference midsurface and the strain measures. In Section 3, we derive the general expression of the two-dimensional strain energy density for shells made of isotropic and homogeneous materials. Thus, we start from a three-dimensional shell-like body and proceed by integration over the thickness. The dimensional reduction procedure involves some special approximations for thin shells, which lead to a simplified reduced form of the shell strain energy density. The coefficients of the strain energy function are expressed as integrals depending on the thickness , as well as on the mean curvature and the Gauss curvature of the initial configuration. If we develop these coefficients as power series of and keep only the terms up to the power , then we obtain a shell model of order , for any odd integer , see Section 4. In Section 5, we show that the strain energy function is coercive for the general linear shell model (as ). Moreover, we prove that the coercivity property also holds for the shell model of order , for all .
1.2. Summary of notations
We present first some useful notations which will be used throughout this paper. The Latin indices range over the set , while the Greek indices range over the set . The Einstein summation convention over repeated indices is used. A subscript comma preceding an index designates partial differentiation with respect to the variable , e.g., . We denote by the Kronecker symbol, i.e., for , while for .
We employ the direct tensor notation. Thus, ⊗ designates the dyadic product and is the identity second-order tensor in the 3-space. Let denote the trace of any second-order tensor . The symmetric part and the deviatoric part of are defined by and , respectively. The scalar product between any second-order tensors and is denoted by . For any vector and second-order tensor we denote for convenience .
2. Geometrical and kinematical relations for linear shells
Let us consider the reference configuration of a shell-like body with curved midsurface and constant thickness . The convected curvilinear coordinates on are denoted by , the unit normal vector to the surface is and the thickness coordinate along is designated by . Thus, the position vector of a generic point of the shell-like body can be written as
where stands for the position vector of points on the midsurface . Let be the covariant base vectors and the contravariant base vectors such that (the Kronecker symbol). We take for convenience.
Let us recall briefly some known shell relations which will be useful in the sequel. The first fundamental tensor (metric tensor) and the second fundamental tensor (curvature tensor) of the midsuface are given by
where and are symmetric. Here, ∇ denotes the surface gradient operator given by for any field . Let .
The identity tensor of the 3-space can be decomposed as
so can also be regarded as the projection tensor on the tangent plane of . Denote by the set of all tensors in the tangent plane, i.e., the set of all second-order tensors of the form . We see that the tensors and are elements of the linear space , and that plays the role of the identity tensor in the space . Indeed, for any tensor we have .
Let be the mean curvature and the Gauss curvature of the midsurface . Then, we have the following relation of Cayley–Hamilton type:
Consider the cofactor tensor in given by
We introduce the tensors and by
such that
The Christoffel symbols of the reference midsurface are characterized by
Let designate the displacement vector of points on the midsurface,
where is the position vector of the deformed midsurface. The following well-known tensors are measures of distorsion for the midsurface
where designates the metric, the curvature tensor, and the Christoffel symbols in the deformed configuration. Then, the change of metric tensor (also called the infinitesimal surface strain) and the change of curvature tensor (bending measure) are given by
where . If we denote the components of the displacement vector by
Both tensors and are symmetric. From equation (12) it follows that
so we have
Let us denote by the vector
Using the vector field , we can express the tensor as follows
Moreover, the following relation holds (see Steigmann et al. [9]):
so the change of Christoffel symbols is expressed by
In view of the above relations, one can show that
so we have
Note that can be expressed as a combination of the covariant derivatives of the strain tensor by the following relation:
where .
Remark: In what follows, we consider isotropic and homogeneous elastic shells characterized by the Lamé constants and . Let us denote by the bilinear form
defined for any tensors of the form , . The associated quadratic form is
Then, in the classical linear theory of shells (Koiter), the areal strain energy density is expressed as a function of and in the form (see literature [6, 7, 8, 19, 20])
3. Derivation of the two-dimensional shell energy density
Let be the three-dimensional displacement field of the shell-like body and be its gradient. We employ carets to denote the same fields written as functions of the coordinates , i.e.,
For an isotropic and homogeneous elastic material with Lamé constants and , the tensor of elastic moduli is given by
and the strain energy density is
Let us denote by the bilinear form
and let be the associated quadratic form. Then, the strain energy density (29) can be written as
The elastically stored energy of the three-dimensional shell-like body is given by the volume integral
since the elemental volume and elemental area are expressed by (see Steigmann et al. [9])
In view of equations (31) and (32), we see that the areal strain energy density of the shell is given by
3.1. Gradients of the displacement field
In order to perform the integration over the thickness in equation (34), we develop the displacement field and its gradient as power series of the thickness coordinate . For any field , denote for brevity by the value of at . Also, we designate its partial derivatives by and . Thus, we can write the expansion
where is the displacement of the midsurface and
Similarly, we can develop about in the form
Let us determine the expression of the derivatives for any . For the three-dimensional displacement gradient , we have the relation (see Steigmann et al. [9])
Next, we need a formula for the higher derivatives of . By differentiating the relation with respect to , we get , so we have (since )
Furthermore, we differentiate the last equation and find
We can continue this procedure and show by induction that the following formula holds:
Now differentiating times relation (38) with respect to and using equation (39) we find
The last relation generalizes relation (38). We take here and obtain
For the orders , this general formula reads
3.2. Simplifying assumptions and approximations
We will adopt now some assumptions (specific to shell theory), which allow to simplify relations (37) and (42) and finally to integrate over the thickness.
Let be the Piola stress tensor given by , so we have
We assume that the transversal stress vector is very small, such that we can approximate
These conditions provide equations for the determination of the coefficients (all ) in the development (35) in terms of and its gradients.
Let us prove first the following useful result:
Lemma 1.For any second-order tensor , we define the tensor according to equation (28) by
Then, the equation
is equivalent to
which means that
where we have denoted by the linear operator given by
Proof. If we decompose , then equation (47) can be written successively in the equivalent forms
or
or
or, since and ,
so we derive relation (48). Substituting from equation (48) into the representation and using notation (50), we obtain the desired result (49). The proof is complete. ■
Thus, we have determined the vector from equation (51) and we denote this solution with , see equation (54). In the following developments, we replace with and we mark any function expressed with help of by a superposed bar, e.g.,
Next, to determine the vector we write equation (45) for in the form
cf. equation (43). Let us introduce the tensor given by
such that we have and . Hence, applying Lemma 1 for equation (56), we determine the vector in the form
Notice that the tensor defined by equation (57) can be expressed in terms of the bending measure and the strain tensor by the following equation:
To prove this relation, we use equation (54)1 and write
Furthermore, from relations (17), (18), and (13)1 we get
Let us approximate now the gradient of . From equations (58)1 and (59) it follows
In this model, we do not take into account the gradients of the strain tensors and . Then, in view of the above relation, we can neglect the gradient of , i.e., we approximate
We can proceed similarly for the determination of the vector field : using the approximation (63) in relation (43)3 we get
and by virtue of Lemma 1 and equation (69), we derive
If we take the gradient of relation (71)1 and then neglect the gradients of as mentioned above, we deduce the approximation
Equations (71) and (72) show that relations (68) hold also for the order , so relations (68) are proved for any by the induction procedure.
Taking into account definition (50), we see that relations (68) infer
where we consider for convenience.
3.2.3. Reconstruction of power series expansions
We can use now the power series expansion (37) to express the displacement gradient: from equations (54)2, (58)2, and (68)2 we find
Furthermore, let us show the relation
Indeed, we have
since , in view of equation (4). Then, we divide the above relation by and we deduce
i.e., relation (75) holds. Substituting equation (75) into equation (74), we finally obtain the displacement gradient in the form
Remark: We can alternatively justify the last relation in the following way: by virtue of the power series expansion of given by relation (35), the displacement gradient can be represented as
Hence, the adoption of the approximations (for , cf. equation (68)) is tantamount to assume the approximation
where is given by equation (54) (i.e., is obtained from the equation ).
On the basis of equations (77) and (38), we can express the three-dimensional displacement gradient as follows
which confirms the result (76) that was derived previously by means of power series expansions.
3.3. Integration over the thickness
We proceed to determine the expression of the areal strain energy density by computing the integral in equation (34). To this aim, we employ the displacement gradient given by equation (76) and the following auxiliary result.
Lemma 2.Consider the bilinear forms and defined byequations (24), (30) and the linear operator defined byequation (50). Then, for any tensors , the following relations hold:
Proof. (i) In view of the decomposition , it is clear that
Using this equation and the relation
we obtain the desired result (i).
(ii) Let us denote for the moment by the vector . Then, we have , so it follows
By a straightforward calculation based on the definition (30), we find that
(iii) Since , we derive directly from definition (24) that relations (iii) hold true. ■
By virtue of Lemma 2 and relations (6) and (76), we can transform the integrand in equation (34) as follows:
We insert equation (83) into equation (34) and integrate over the thickness to find the following form of the areal strain energy density:
where is given by equation (59) and we denote by the integrals
3.3.1. Explicit form of the coefficients in the strain energy density
Note that the coefficients appearing in the areal strain energy density (84) depend on the curvature of the reference midsurface and they involve the integrals of type (85) with . Next, we want to determine the explicit form of the integrals .
To this aim, let us denote by the sequence of integrals
We see that
and we have in general
Using this notation, we can write for the integrals the following recurrence relation
which can be justified by a simple transformation of the integral in equation (85).
In what follows, we need to expand the function as a power series of . In this respect, we prove the useful result:
Lemma 3.Denote by the sequence of coefficients in the power series expansion
Then, the sequence satisfies the recursive equation
Moreover, the coefficientscan be written as polynomial functions of the mean curvatureand the Gauss curvaturein the following explicit form:
wheredesignates the biggest integer number not exceeding.
Proof. Let and denote the principal curvatures of the reference midsurface and the radii of curvature. Then, we have
and it follows
since and we assume for thin shells that
Thus, we have , so we can write the power series expansion
Then, we consider the Cauchy product of the two power series in equation (95) and obtain
On the basis of equation (97), we can show now the recursive relation (91). Indeed, we have , and
and relation (91) is proved. To verify the formula (92), we employ the general polynomial identity
which holds for any . This identity can be proved by mathematical induction with respect to (see a proof in Appendix). If we apply relation (98) for , and take into account (97), then we obtain
and in view of equation (93), we see that relation (92) holds true. ■
From the recurrence relation (91), we can easily compute the first coefficients in the expansion (90) as follows:
Using Lemma 3 and the recurrence relation (89), we can prove by induction that the following equation holds:
It remains to determine the integrals and which appear in the above coefficients of relation (102). We remark that and can be expressed in terms of . Indeed, in view of equations (85) and (89), we have
For convenience, let us denote for the moment the shell thickness with , i.e., . Thus, we obtain
Now we only need to compute the integral , which can be written as
In the case (umbilic point), we can extend relations (107), (108), and (109) by continuity and obtain
with and .
In conclusion, relations (107)–(109) and (113) give the explicit expressions of integrals appearing in the constitutive coefficients, in terms of , and the principal curvatures of the reference midsurface. The obtained form of the areal strain energy density is given by relation (84).
3.4. The shell model of order
Let us represent the strain energy density (84) in an alternative form by expanding the coefficients , and as power series of .
In view of Lemma 3 and definition (85), we have
Taking into account that for any , the last relation can also be written in the form
Using relations of this type for in equation (84), we obtain the following alternative expression of the strain energy density
To derive now a shell model of order with , we truncate the power series appearing in the coefficients of equation (116) by retaining only the terms up to . Thus, we obtain the following strain energy density:
Remark: We observe that the last two terms in equation (117) are defined only for , i.e., . In the special case , we obtain the following energy density for the model of order
which is in agreement with the corresponding representations in classical approaches of linear shell theory (see the work by Steigmann et al. [9]).
For , we obtain from equation (117) the strain energy density for the model of order in the following form:
Similarly, using the general expression (117), we can write down the strain energy densities for the shell models of order , , etc.
4. Simplification of the general shell model
We can obtain a simplified version of the general shell model provided we approximate the tensor which appears in the expression of the strain energy density. Notice that the tensor is given by relation (59).
During the derivation of the model in Section 3.2 we neglected the gradients of the strain measures , . Accordingly, it is consistent to neglect also the gradient in relation (59), i.e., we approximate
Thus, by replacing the tensor with in the expression of the strain energy density, we obtain a simplified version of the general shell model.
Let us write the new (simplified) forms of the strain energy density: substituting equation (120) in equation (84), we derive the compact form
In the last relation, we can use the equation , as well as , to express the right-hand side in terms of the tensors and . Thus, by a straightforward calculation we can put equation (121) in the equivalent form
where we have also employed the recurrence relation (89) for .
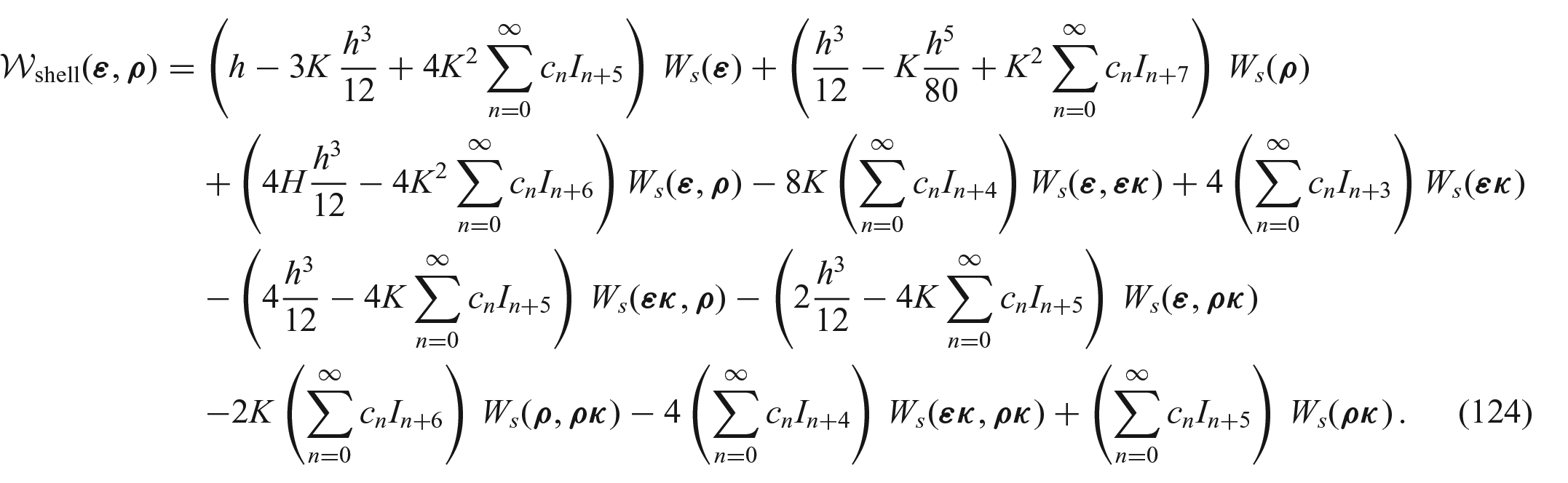
Notice that the coefficients in the above expressions (121), (122) can also be written with help of power series of . Thus, using expansions of the type (114), the strain energy density (121) can be written in the form
where all the with an even index are vanishing, i.e., for all . Similarly, the strain energy density (122) can be written alternatively by means of power series of as follows:
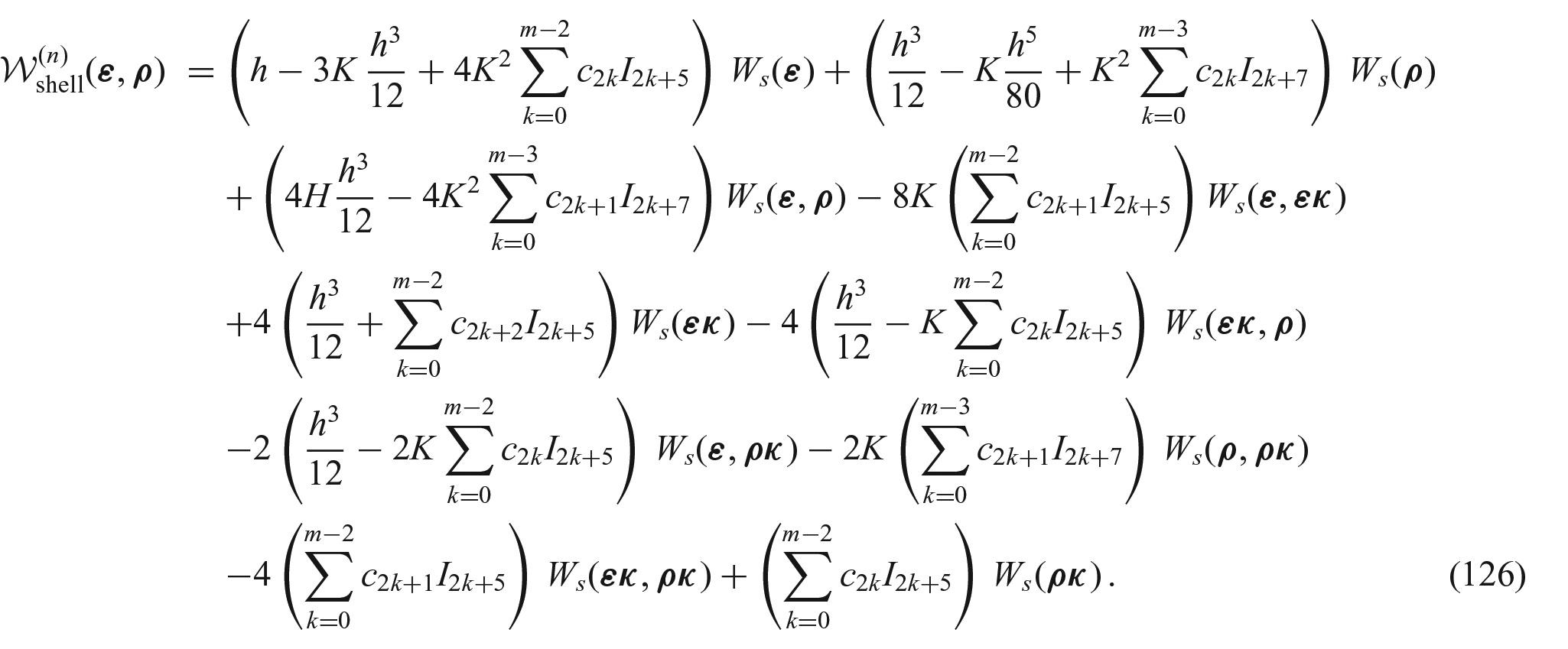
We are now able to present the model of order for this simplified version of the strain energy density. Thus, for the compact form (123), we truncate the series up to the power and derive
where is odd and (for all ). Similarly, for any odd integer , we truncate the power series appearing in the coefficients of equation (124) and obtain the following equivalent (expanded) form of the strain energy density for the model of order
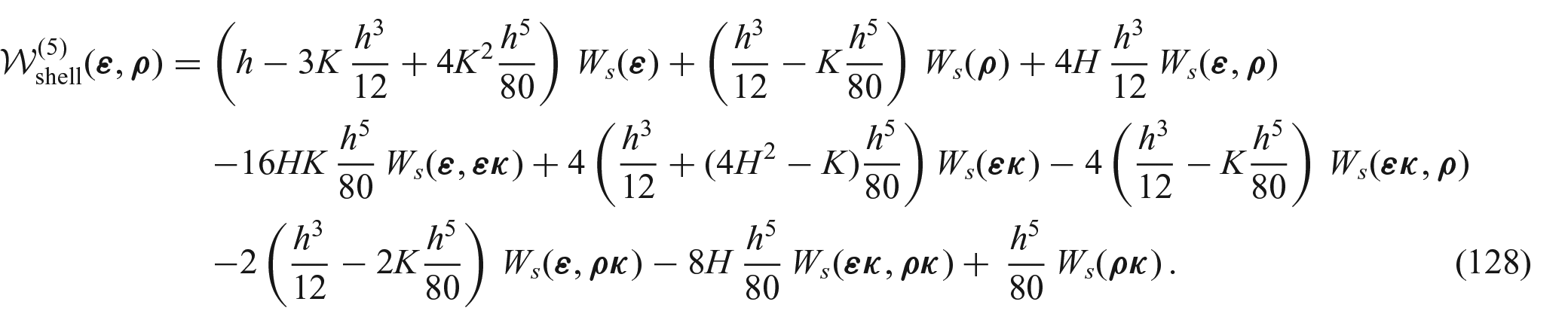
Remark: From the above relations we can readily deduce the expressions of the energies for the models of order , , , etc. For instance, for , the condensed form (125) reduces to
while the expanded form (126) becomes
Note that relations (127) and (128) are equivalent.
If we keep only the terms up to the power , then we get the following condensed expression for the model of order
which can be written equivalently in the expanded form
In the classical (Koiter) theory of linear elastic shells, the coupling part of the energy and all the terms of order are neglected (where and ). Also, the term is considered negligible in comparison to , since we have
Under these approximations, the strain energy density (130) reduces to the linear Koiter model given by relation (26).
5. Coercivity of the strain energy function
In this Section, we show the coercivity of the energy density function, both for the shell model of order and for the general shell model (when ). Note that the coercivity property is crucial to establish the existence of solutions to the shell equations.
We assume throughout that the Lamé constants satisfy the usual conditions
which assure the positive definiteness of the quadratic form defined by equation (30). We denote by and the positive constants
Let us show first that the quadratic form defined by equation (25) satisfies the relation
Indeed, if we consider the surface deviator operator defined in the work by Bîrsan and Neff [21] by
then we have (see f. (104) from the work by Bîrsan and Neff [21])
Using this relation in the definition (25), we can estimate
so the first inequality in equation (133) is proved. Similarly, we can also show the second inequality in equation (133).
For future use, let us denote by the following maximum
where are the curvature radii of the midsurface.
5.1. Coercivity for the general shell model ()
Let us establish the following coercivity result.
Proposition 4.Assume that the principal curvatures satisfy the condition . Then, the strain energy density function defined byequation (122)satisfy the inequality
so it is coercive.
Proof. In view of the derivation procedure for the shell model, we see that the strain energy density is obtained by integration over the thickness from the following integral (see equations (83), (84), and (120))
Using here the estimate (133) and the relation we can write the inequalities
To this aim, we use the spectral representation of the initial curvature tensor in the form
where and are the orthonormal principal vectors. Then, we have and the cofactor can be written as
where we denote
Thus, we have
and we can estimate
since
Using notation (136) we have
so inequality (150) infers
Since the vectors and are orthogonal, we can write
so inequality (152) reduces to
which means that relation (146) holds true.
Using inequalities (145) and (146) in equation (144), we deduce the estimate
Then, for any scalar we can write
so
Let us choose now the constant such that the above coefficients of and be positive. From the hypothesis , it follows that
so we have
and
Thus, if we choose , then we have
Finally, we insert these inequalities into equation (155) and obtain that estimate (137) holds true. The proof is complete. ■
Remark: The coercivity property established in Proposition 4 is important, since it allows one to prove the existence of weak solutions to the equilibrium equations for the general model of linear elastic shells. Indeed, using the method presented in the work by Ciarlet [19, 20, 22], the existence proof relies on the coercivity of , on the Korn inequality for the midsurface and on the Lax–Milgram theorem.
5.2. Coercivity result for the shell model of order with 5
The expression of the strain energy density is given by equation (126), or equivalently (125). Notice that in the case the last two terms are missing in expression (125). These terms play an important role in the coercivity proof. Therefore, we consider first the case and establish some auxiliary results.
Lemma 5.(i) Let be the coefficients of the series expansion of given by equation (90). Then, it holds
The equalitytakes place if and only if.
(ii) For the coefficientsand for any, the following relation holds
(iii) If the conditionis satisfied, then the following estimate holds for any:
Proof. (i) In view of relation (97) we see that
so we deduce , since the function is strictly monotonically increasing.
(ii) Using relation (160), we can write (in case )
In the case , we obtain directly
(iii) The inequality is true in the case , since we have
In the case , we can write
Next, if we denote the function
then relation (161) infers
One can easily prove that
Indeed, if , then there exists a value between and such that
In the case when , let us assume without loss of generality that . Then, we have
so it follows
In both cases, inequality (164) is proved. Using relation (164) in equation (163), we obtain the estimate (159). The proof is complete. ■
Let us show now the following coercivity result.
Proposition 6.Assume that the reference midsurface satisfies the condition . Then, the strain energy density given for by relation (126) (or equivalently (125)) is coercive. The following inequality holds for any :
Proof. We establish first a recurrence relation for the energy functions : for any it holds
Indeed, in view of equation (125), we can write the difference
so the recurrence relation (166) holds true. Hence, using Lemma 5 (i) we deduce
Since this inequality holds for any , we obtain inductively
Here, the energy density is given by equation (127) and satisfies the inequality
Indeed, to verify the last relation, we use equation (127) and write successively
In view of , we have
so
Using relation (172) in equation (170), we deduce that inequality (169) is true. Then, substituting relation (169) into equation (168), we obtain the estimate
which holds for any . Next, we want to show that the above expression in brackets is bounded from below by a positive constant. Applying now Lemma 5 (ii) and (iii), we can write successively
i.e., the coercivity relation (165) holds. The proof is complete. ■
5.3. Coercivity result for the shell model of order
In the case , the expression of the strain energy density is given by equation (129), or equivalently (130). We notice that the energy function has a special form (since the higher order terms do not appear) and we need to proceed in a different manner to prove the coercivity.
Let us denote by the ratio between and , i.e.,
where and are defined by equation (132). Note that we can also write
since we have
and conversely
We can formulate now the coercivity result.
Proposition 7.Assume that the principal curvatures of the reference midsurface are such that
Then, the strain energy density function for the shell model of order given by equation (130)satisfies the following coercivity inequality:
Proof. For the coupling terms in the energy function (130), we can use the Cauchy–Schwarz inequality and relation (133) to estimate
Moreover, for the norms and , we have the inequalities
which can be justified as follows: for any symmetric tensor , we have
Then, the symmetric part is
and, hence,
Thus, relations (187) hold true.
Making use of inequalities (133), (186), and (187) in the expression of the energy (130), we derive that
or equivalently, dividing by and using notation (182),
Since by hypothesis, the coefficient of can be decomposed as follows:
where is a constant which will be precised later on. Notice that the function in the square brackets in relation (190) is a quadratic form in the variables , . This function is always positive, provided that its discriminant is negative. Let us compute the discriminant
Since , we choose now and relation (193) shows that . Hence, the function in square brackets in equation (190) is always positive (for ) and thus we derive
which is equivalent to the coercivity relation (185). This completes the proof. ■
Remark: Since the strain energy density is coercive (for all ), one can use the Korn inequality for surfaces and the Lax–Milgram theorem as in the classical linear theory [19, 20, 22] to show the existence of weak solutions for the equilibrium equations of shells.
In the dynamical case, one can employ these results in conjunction with the theory of semigroups of operators to prove the existence of solutions to the equations of motion (see the work by Bîrsan [23] for the case of Cosserat shells).
6. Conclusion
In this paper, we have obtained by dimensional reduction a general expression of the areal strain energy density for linear elastic shells. Using usual shell assumptions and approximations, we have derived the reduced explicit form of the energy function, in which the coefficients are expressed as integrals depending on the thickness and curvatures . By developing these coefficients as power series of , and truncating the series at the power , we have deduced the constitutive shell model of order . Finally, we have showed that the proposed areal strain energy functions (both for finite and for ) are coercive. This property is a decisive step in the proof of existence of minimizers for the shell energy.
Footnotes
Appendix 1
Let us prove herein the polynomial identity (98). We denote by the symmetric polynomial
and by
the elementary symmetric polynomials in . According to a known result in algebra, can be written as a polynomial in , i.e., for any , there exists a polynomial such that
For instance, we have
We notice that the polynomials satisfy the following recursive relation
Indeed, in view of equation (194), the last relation can be written as
or equivalently,
which holds true for any .
Now, taking into account (194), we can put the identity (98) in the simpler equivalent form:
We prove next that equation (197) holds for any and any integer , on the basis of the recursive relation (196). In order to avoid the expression as upper bound in the summation, we distinguish the two cases and and write equation (197) twofold as follows: prove that for any integer and any it holds
Let us prove the statement (198) by induction with respect to . For and , relations (198) read
and, respectively,
which hold true, cf. equation (195). We assume now that the statement (198) is true for an integer and we show that it holds also for , i.e., we prove
so relation (199)1 holds true. Similarly, using equations (196), (198)2, and (199)1, we can write
Thus, equation (199)2 also holds. By virtue of the induction principle, we deduce that the statement (198) is valid for any . In conclusion, we have proved the polynomial identity (98).
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research has been funded by the Deutsche Forschungsgemeinschaft (DFG, German Research Foundation) – Project no. 415894848: BI 1965/2-1.
ORCID iD
Mircea Bîrsan
References
1.
BallJ.Some open problems in elasticity. In: ChangDHolmDPatrickG, et al. (eds) Geometry, mechanics and dynamics. New York: Springer, 2002, pp. 3–59.
2.
CiarletPLodsV. Asymptotic analysis of linearly elastic shells. I. Justification of membrane shell equations. Arch Rat Mech Anal1996; 136: 119–161.
3.
CiarletPLodsVMiaraB. Asymptotic analysis of linearly elastic shells. II. Justification of flexural shell equations. Arch Rat Mech Anal1996; 136: 163–190.
4.
LewińskiTTelegaJ.Plates, laminates and shells: asymptotic analysis and homogenization. Singapore: World Scientific, 2000.
5.
ParoniRTomassettiG.Buckling of residually stressed plates: an asymptotic approach. Math Mech Solids2015; 20: 982–997.
6.
SteigmannD.Two-dimensional models for the combined bending and stretching of plates and shells based on three-dimensional linear elasticity. Int J Eng Sci2008; 46: 654–676.
7.
SteigmannD.Extension of Koiter’s linear shell theory to materials exhibiting arbitrary symmetry. Int J Eng Sci2012; 51: 216–232.
8.
SteigmannD.Koiter’s shell theory from the perspective of three-dimensional nonlinear elasticity. J Elasticity2013; 111: 91–107.
9.
SteigmannDBîrsanMShiraniM.Lecture notes on the theory of plates and shells. Classical and modern developments. Springer, in print, 2023.
10.
PruchnickiE.Two-dimensional model of order for the combined bending, stretching, transverse shearing and transverse normal stress effect of homogeneous plates derived from three-dimensional elasticity. Math Mech Solids2014; 19: 477–490.
11.
BîrsanMGhibaIMartinR, et al. Refined dimensional reduction for isotropic elastic Cosserat shells with initial curvature. Math Mech Solids2019; 24(12): 4000–4019.
12.
BîrsanM.Derivation of a refined six-parameter shell model: descent from the three-dimensional Cosserat elasticity using a method of classical shell theory. Math Mech Solids2020; 25(6): 1318–1339.
13.
BîrsanM.Alternative derivation of the higher-order constitutive model for six-parameter elastic shells. Z Angew Math Phys2021; 72: 50.
14.
GhibaIBîrsanMLewintanP, et al. The isotropic Cosserat shell model including terms up to O. Part I: derivation in matrix notation. J Elasticity2020; 142: 201–262.
15.
GhibaIBîrsanMLewintanP, et al. The isotropic Cosserat shell model including terms up to O. Part II: existence of minimizers. J Elasticity2020; 142: 263–290.
16.
KulikovGCarreraE.Finite deformation higher-order shell models and rigid-body motions. Int J Solids Struct2008; 45: 3153–3172.
17.
ZhavoronokS.A general higher-order shell theory based on the analytical dynamics of constrained continuum systems. In: PietraszkiewiczWWitkowskiW (eds) Shells structures: theory and applications, vol. 4. London: Taylor & Francis, 2018, pp. 189–192.
18.
ArbindAReddyJSrinivasaA.A general higher-order shell theory for compressible isotropic hyperelastic materials using orthonormal moving frame. Int J Numer Meth Eng2021; 122: 235–269.
19.
CiarletP.Introduction to linear shell theory. Paris: Gauthier-Villars, 1998.
20.
CiarletP.Mathematical elasticity, vol. III: theory of shells. 1st ed. Amsterdam: North-Holland, 2000.
21.
BîrsanMNeffP.Analysis of the deformation of Cosserat elastic shells using the dislocation density tensor. In: dell’IsolaFSofoneaMSteigmannD (eds) Advanced methods of continuum mechanics for materials and structures. Advanced Structured Materials 69, Singapore: Springer Nature, 2017, pp. 13–30.
22.
CiarletP.An introduction to differential geometry with applications to elasticity. Dordrecht: Springer, 2005.
23.
BîrsanM.Inequalities of Korn’s type and existence results in the theory of Cosserat elastic shells. J Elasticity2008; 90: 227–239.