
Abstract
The study of periodic systems under the action of moving loads is of high practical importance in railway, road, and bridge engineering, among others. Even though plenty of studies focus on periodic systems, few of them are dedicated to the influence of a local inhomogeneous region, a so-called transition zone, on the dynamic response. In railway engineering, these transition zones are prone to significant degradation, leading to more maintenance requirements than the rest of the structure. This study aims to identify and investigate phenomena that arise due to the combination of periodicity and local inhomogeneity in a system acted upon by a moving load. To study such phenomena in their purest form, a one-dimensional model is formulated consisting of a constant moving load acting on an infinite string periodically supported by discrete springs and dashpots, with a finite domain in which the stiffness and damping of the supports is larger than for the rest of the infinite domain; this model is representative of a catenary system (overhead wires in railway tracks). The identified phenomena can be considered as additional constraints for the design parameters at transition zones such that dynamic amplifications are avoided.
1. Introduction
Periodic systems under the action of moving loads have attracted the attention of researchers in the past century. These problems pose academic challenges and are of high practical relevance due to their application in railway, road, and bridge engineering, among others. Despite the numerous studies on periodic systems, few investigations are dedicated to the influence of a local inhomogeneous region, a so-called transition zone, on the dynamic response. In railway engineering, significant degradation is observed in the vicinity of these transition zones, requiring more maintenance than the rest of the structure [1]. This study aims at investigating if the combination of (1) a transition zone and (2) the periodic nature of the structure can lead to undesired response amplification that is otherwise not observed in systems that neglect either (1) or (2).
The study of periodic structures goes back to Newton who investigated the velocity of sound in air using a lattice of point masses; for an interesting historical background of wave propagation in periodic lumped structures, see Brillouin [2]. Rayleigh studied for the first time a continuous periodic structure [3], considering a string with a periodic and continuous variation of density along its length. When it comes to a periodic and discrete variation in continuous structures, Mead [4–6] was among the pioneers who studied free wave propagation in such systems. Concerning moving loads on such structures, Jezequel [7] and Cai et al. [8] were among the first to study periodically and discretely supported beams acted upon by a moving load. Vesnitskii and Metrikin [9,10] offered an extensive investigation into the behaviour of a periodically and discretely supported string acted upon by a moving load. More recently, there have been numerous studies of periodic guideways acted upon by vehicles, for example [11–17], and also numerous studies focusing on the vehicle instability caused by the periodic nature of the guideway (i.e. parametric instability or sometimes called parametric resonance), for example [18,19].
Studies using complex models containing periodic structures and transition zones are present in literature, for example [20–23]; however, these studies concentrate on predicting the transient response in the vicinity of the transition zone and do not treat specifically the influence of the discrete and periodic supports on these results. Moreover, with increased model complexity, the identification and investigation of particular/isolated phenomena becomes very difficult, if not impossible. Therefore, this paper focuses on the identification and investigation of specific phenomena that arise due to the combination of periodicity and local inhomogeneity in a system acted upon by a moving load. The local inhomogeneous region is itself periodic too, but with different parameters than the rest of the structure.
To study phenomena in their purest form, a one-dimensional (1D) model is formulated consisting of a constant moving load acting on an infinite string periodically supported by discrete springs and dashpots, with a finite domain in which the stiffness and damping of the supports is larger than for the rest of the infinite domain. The novelty of this research lies in the identification and investigation of three phenomena arising from the combination of periodicity and local inhomogeneity in a system acted upon by a moving load; they have not been yet reported in the literature. The three phenomena are described in detail in Sections 4.1, 4.2, and 4.3, respectively. Although these phenomena are identified in this simple model, they are intrinsic to any periodic system with a local inhomogeneity, and thus, can help understand the potential response amplification in more complex systems that incorporate these two characteristics. Finally, as this model is representative of a catenary system (overhead wires in railway tracks), the three identified phenomena can help understand the fatigue and wear of the catenary systems close to transition zones as well as wear in the energy collector system.
2. Model description
The system studied in this paper consists of an infinite string with distributed mass per unit length

where primes and overdots denote partial derivatives in space and time, respectively. The supports stiffness is a piecewise function in space and is defined as follows:

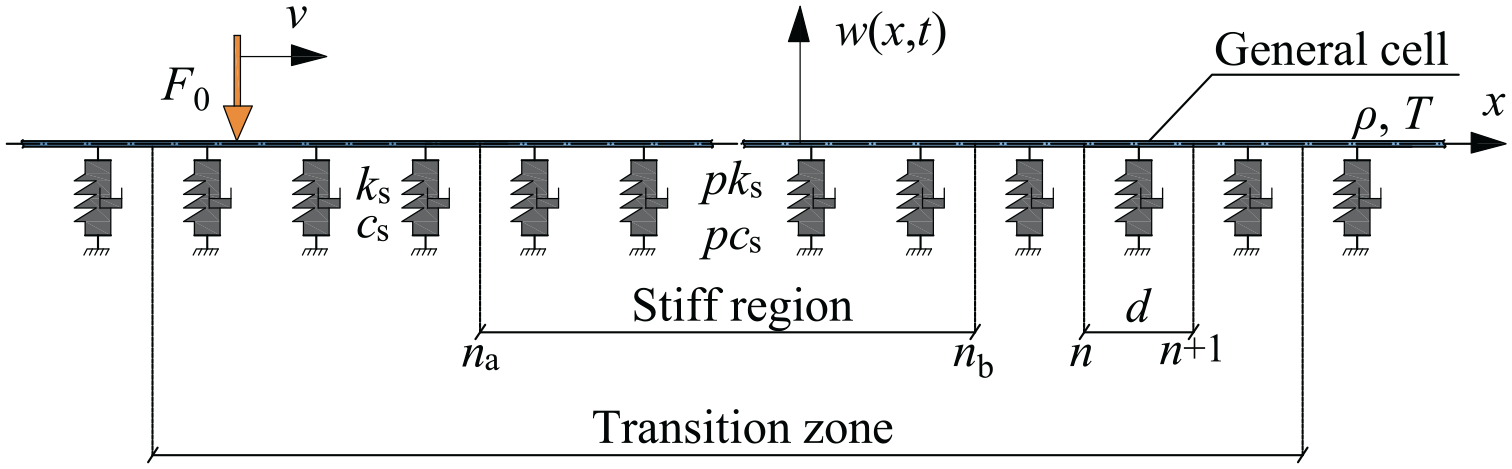
Model schematics: infinite tensioned string discretely supported by an inhomogeneous foundation, subjected to a moving constant load.
For simplicity, the spatial distribution of the damping is assumed to be the same as that of the stiffness. The values for the parameters are taken from Metrikine [24]; they represent the parameters for a realistic catenary system.
In the remainder of the paper, homogeneous system is used to refer to the system without transition zone while inhomogeneous system is used for the system with a transition zone, even though both systems are inherently inhomogeneous due to the discrete supports. Important to note, transition zone does not refer only to the stiff region, but to the stiff region and its vicinity, as can be seen in Figure 1.
3. Homogeneous system
In this section, we present the characteristics of the periodic system without the transition zone. The goal here is to introduce the solution method used throughout this paper, to highlight important characteristics of the periodic and continuous system, and to present the steady-state response to a moving constant load. Note that the system without damping is considered here for clarity in the derivation. To this end, we aim at writing an expression linking the states (displacement and slope) at the two boundaries of a generic cell. First, we apply the forward Fourier transform over time to the equation of motion (equation (1)), thus obtaining the following expression:

where the tilde is used to denote the quantity in the Fourier domain and



where

Using the two interface conditions,

where

where matrix
To investigate the propagation characteristics of the system, we momentarily focus on the system without the moving load, and it would become clear that the following expression links the state at

To reveal specific characteristics of the periodic system, we perform an eigenvalue (

where

As can be seen from equation (12), the dispersion relation for the discretely supported string is a transcendental equation. This means that there are infinitely many wavenumbers
The dispersion curve is presented in Figure 2. Three Brillouin zones are presented and it may seem that the repetition from one zone to the next is exact. However, the branches closest to the dispersion curve of the unsupported string give rise to waves with more energy compared to all the other branches; these branches form the primary dispersion curve. From a physical perspective, the energy propagated from cell to cell is governed by the Floquet wavenumbers
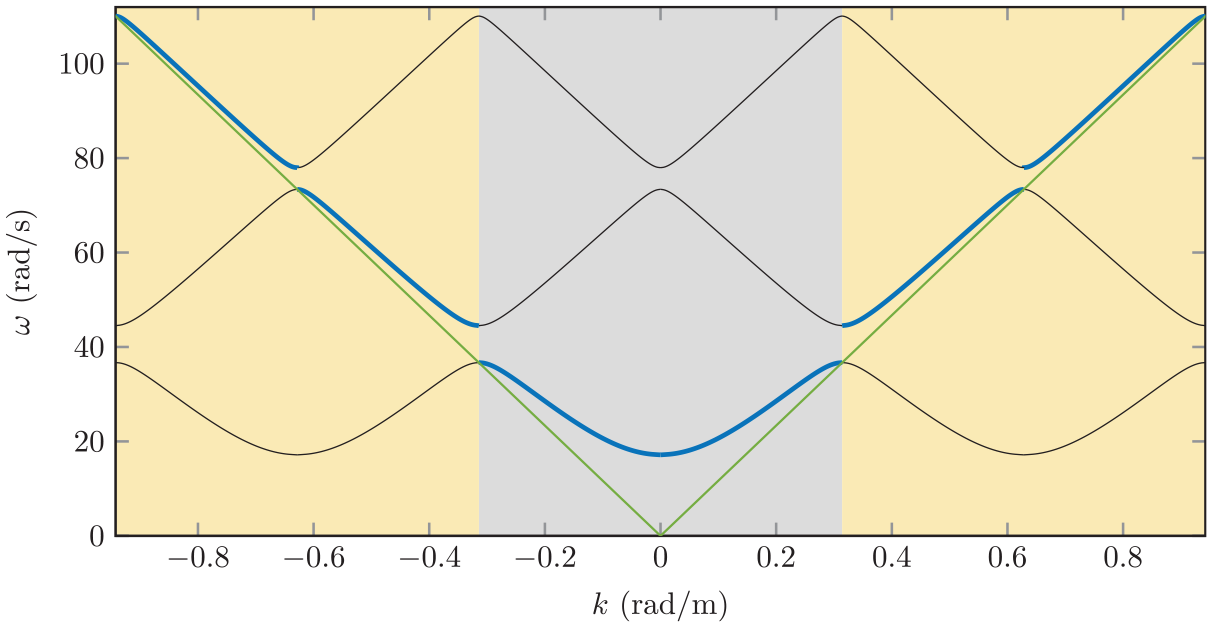
Dispersion curves of the periodic system in three Brillouin zones (black and blue lines) and the dispersion curve of the unsupported string (green line); the different Brillouin zones are indicated through different background colour. The primary dispersion curve is displayed with the thick blue lines while the secondary ones with thin black lines.
Returning to the problem with the moving load, we still need to impose two boundary conditions to have a fully determined solution. Because we are searching for the steady-state response, we can make use of the so-called periodicity condition [10]. For the considered system (the load does not have an inherent frequency), the response inside each cell is exactly the same as in the previous one but shifted in time by

Using equation (13), we can determine the remaining two unknown amplitudes
For a continuously supported string, the steady-state response does not exhibit any wave propagation away from the load (we only consider sub-critical velocities). For the discretely supported string, however, waves are excited from the load every time it passes a support. In the case of a single support, the load generates a continuous wave spectrum when it passes it; this phenomenon is called transition radiation [25–30]. In the periodic system, the waves generated at each support interfere (constructively for some frequencies and destructively for others) leading to a discrete frequency spectrum of the radiated waves; this phenomenon is sometimes called resonance transition radiation [26] because the constructive interference of the radiated waves leads to resonance for some system parameters. More specifically, resonance occurs when the group velocity of one generated wave is equal to the load velocity. From Figure 10, we can identify the velocities at which resonance occurs (consider only the black line). As it can be seen, the system has many velocities at which resonance occurs, but some velocities lead to stronger resonance than others. Strong resonance occurs at low frequencies of the generated harmonic and at high velocities of the load [10].
To determine the frequency/wavenumbers of the waves generated by the moving load, next to the dispersion curve, we need another equation that expresses a relation between the frequency, wavenumber, and the load velocity, namely the kinematic invariant. For this system, the kinematic invariant can be determined from the following equation (10) ( a mathematical derivation of the kinematic invariants is given in Appendix 1):

Equation (14) shows that there are infinitely many kinematic invariants. The zeroth-order kinematic invariant is given by
Figure 3 presents the dispersion curve together with the kinematic invariants of the current problem. The dispersion curve is slightly different compared to the one in Figure 2 due to the presence of damping. It can be seen that there is no intersection point between the zeroth-order kinematic invariant (thick blue line) and primary dispersion curve (thick black line) because the considered load velocity is sub-critical; nonetheless, there are intersection points between higher-order components. The intersections between one of the kinematic invariants and the dispersion curve represent propagating waves emitted by the moving load in the steady state. Moreover, it is important to observe in Figure 3 that the emitted waves form a discrete frequency spectrum, as expected, and that all generated waves have frequencies in the pass bands of the system.
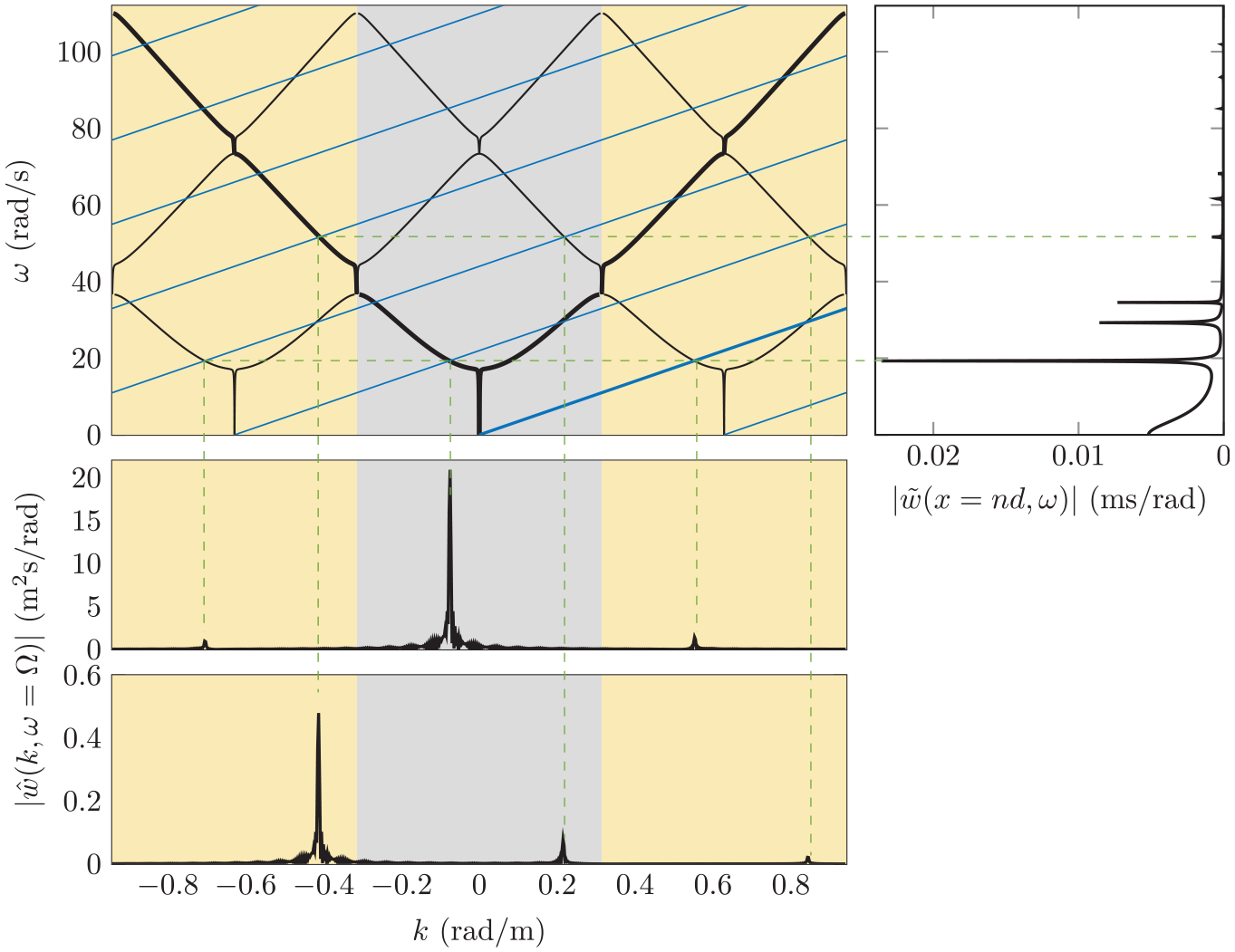
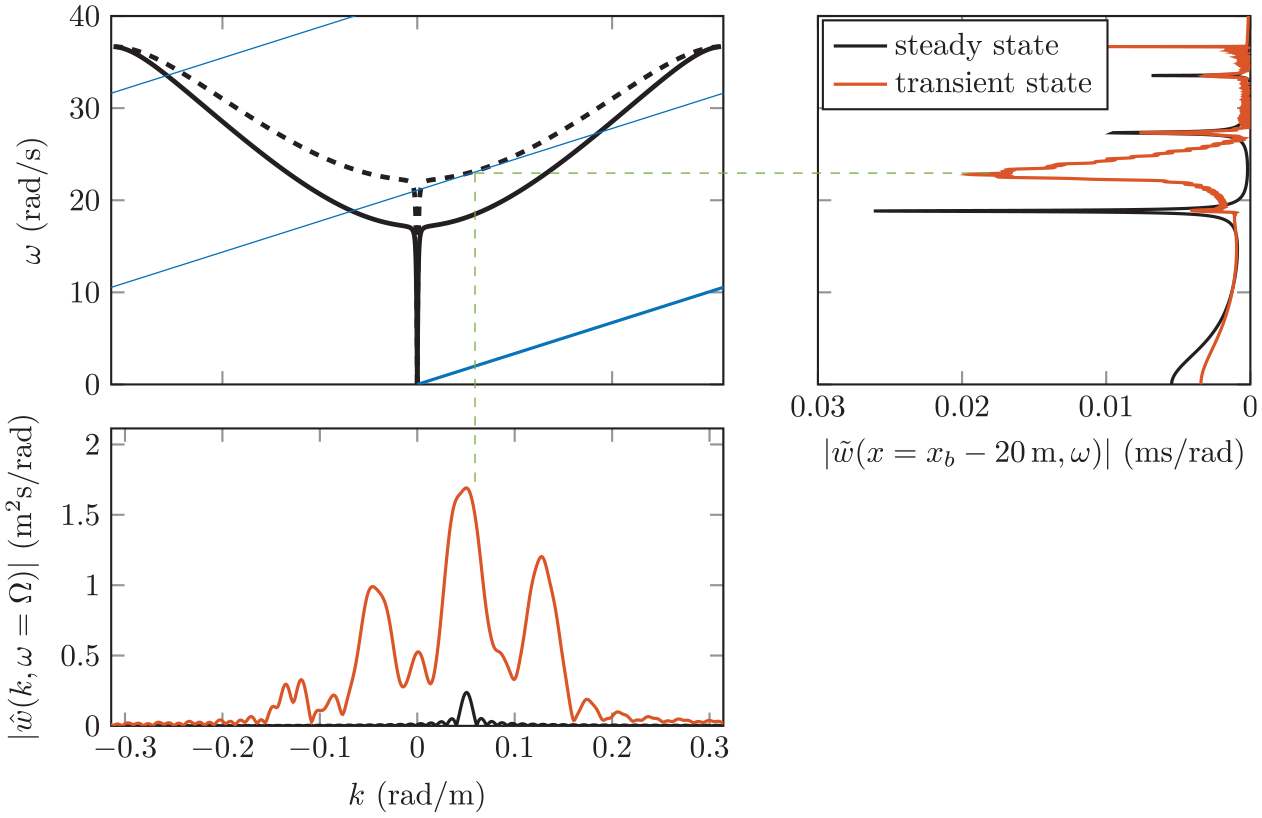
The dispersion curve (black solid lines) and the kinematic invariants (blue solid lines) (top left panel;
Moreover, it is clear from the wavenumber spectrum that the wave pack with frequency
Figure 4 presents a time-domain snapshot of the steady-state displacement field. It can be observed that in front of the load, the wave is mainly governed by one frequency-wavenumber pair while behind more pairs seem to be influential; also, the amplitude of the wave behind the load is larger than the one in front. The wave in front of the load is mainly governed by the second peak in the frequency spectrum which is associated with a positive group velocity larger than the load speed (so it travels in front of the load; see top plots in Figure 3) while the one behind the load is governed by the first and third peaks which are associated with negative group velocities; this explains the difference in amplitude as well as the frequency-wavenumber content of the waves.
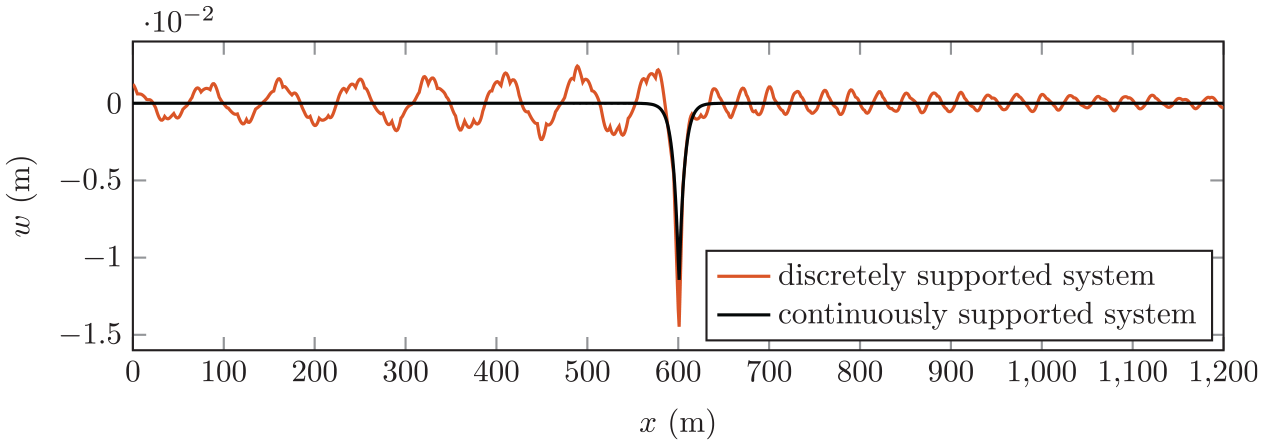
Snapshot of the time-domain displacement field for the discretely and continuously supported systems.
4. Inhomogeneous system
In this section, the periodic system with a transition zone (as depicted in Figure 1) is considered. The solution is obtained using a Green’s function approach; the moving load is first assumed to act inside only one cell and the response of this system is determined. To obtain the response of the system to the moving load acting on all cells, the individual solutions are superimposed. The drawback of this approach is that the load cannot act from
The solution procedure starts, as previously, by applying the Fourier transform over time to equation (1). Then, the loading obtained is only considered for one cell; the solution procedure is demonstrated for the situation in which the load is applied to the left of the stiff zone, but the same procedure needs to be followed when it acts inside the stiff zone or to the right of it. The obtained equation of motion is divided in 5 domains: (1) left of the loaded cell, (2) the loaded cell, (3) right of the loaded cell and left of the stiff zone, (4) inside the stiff zone, and (5) to the right of the stiff zone. Their solutions can be written as done in the previous section and read





where

where
The solution is now determined at the interfaces between cells. To determine the solution inside the cells, one simply needs to use equation (8). In the following, three phenomena are described and investigated that occur due to the combination of periodicity with the local inhomogeneity and lead to response amplification.
4.1. Wave-interference phenomenon
Figure 3 shows that, in the case of a homogeneous system, the frequencies of all emitted waves lie inside the pass bands. However, once there is a change in stiffness of the supporting structure (i.e. a transition zone), the locations of the stop bands are different for the different parts of the infinite domain. Consequently, the frequencies of waves excited by the load in the soft regions can be in the stop band of the stiff zone. This causes the waves to be reflected almost completely by the stiff zone and to interfere with the wave field travelling with the load. This wave interference can lead to amplifications of the response in the transition zone.
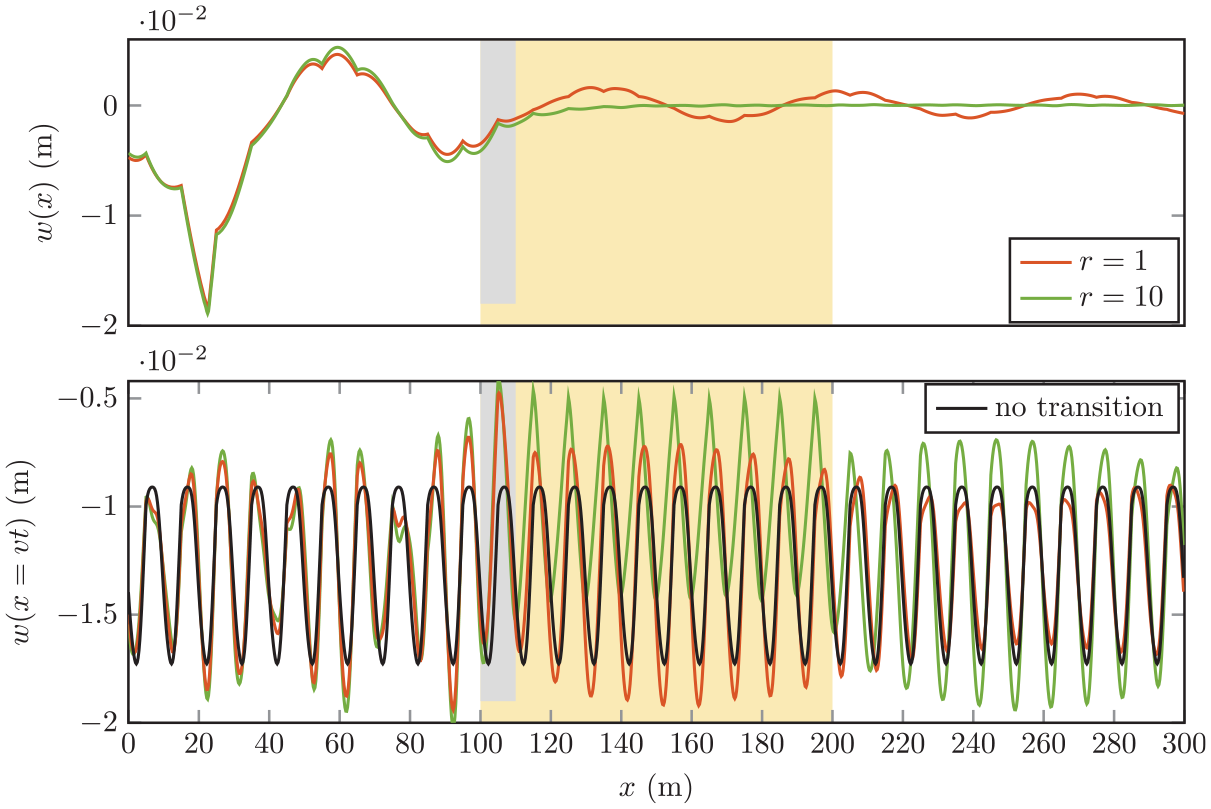
For this mechanism to be pronounced, the amplitude of the waves that are in the stop band of the stiff zone should be significant. This criterion is met when the velocity is close to a resonance velocity. In Figure 10, the strongest resonance in the soft region occurs at a velocity
There are two situations which lead to amplification of the response in the transition zone. First, the forward propagating wave is reflected at the stiff region and propagates backwards interfering with the wave field close to the load. This amplification should be observable at the left of the stiff region. Second, when the load has passed the stiff region, the backward propagating wave is reflected at the stiff zone and propagates forward interfering with wave field close to load. This amplification should be observable to the right of the stiff zone.
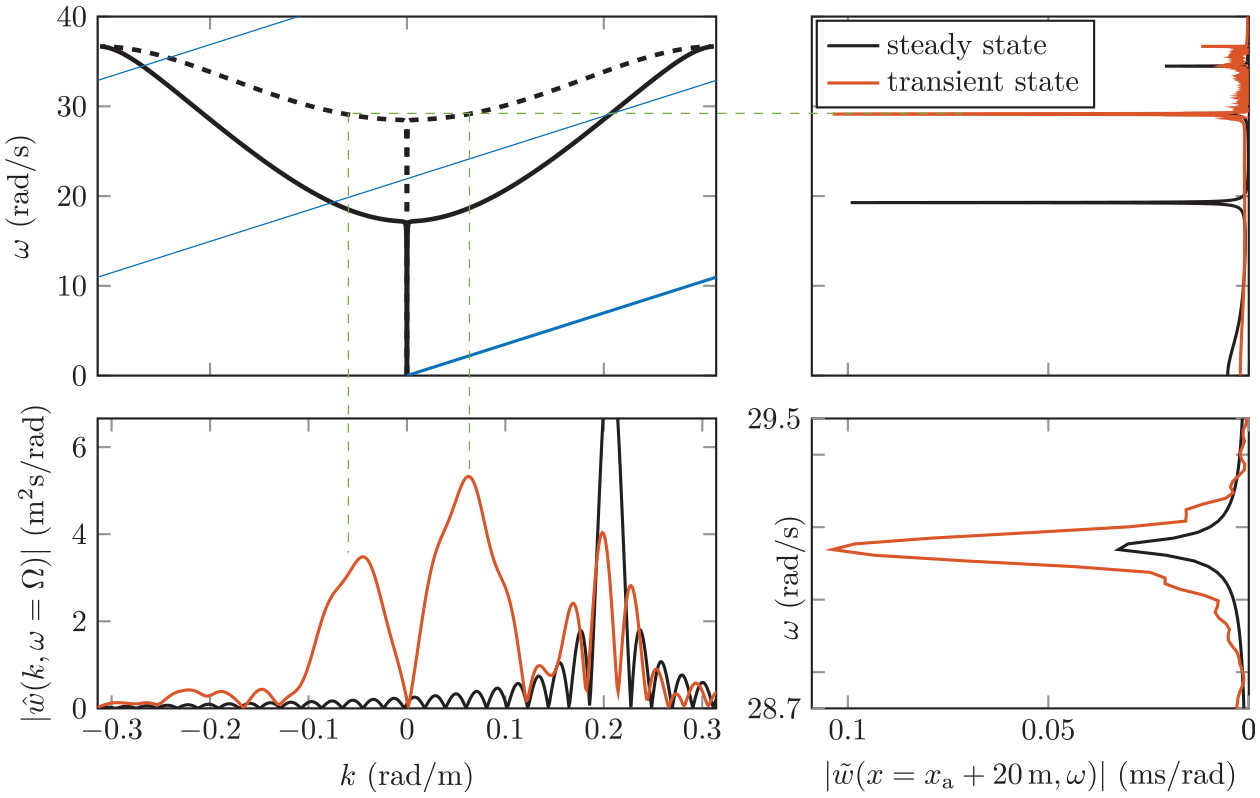
First, we investigate the region to the left of the stiff zone. The response is evaluated at approximately 5 m to the left of
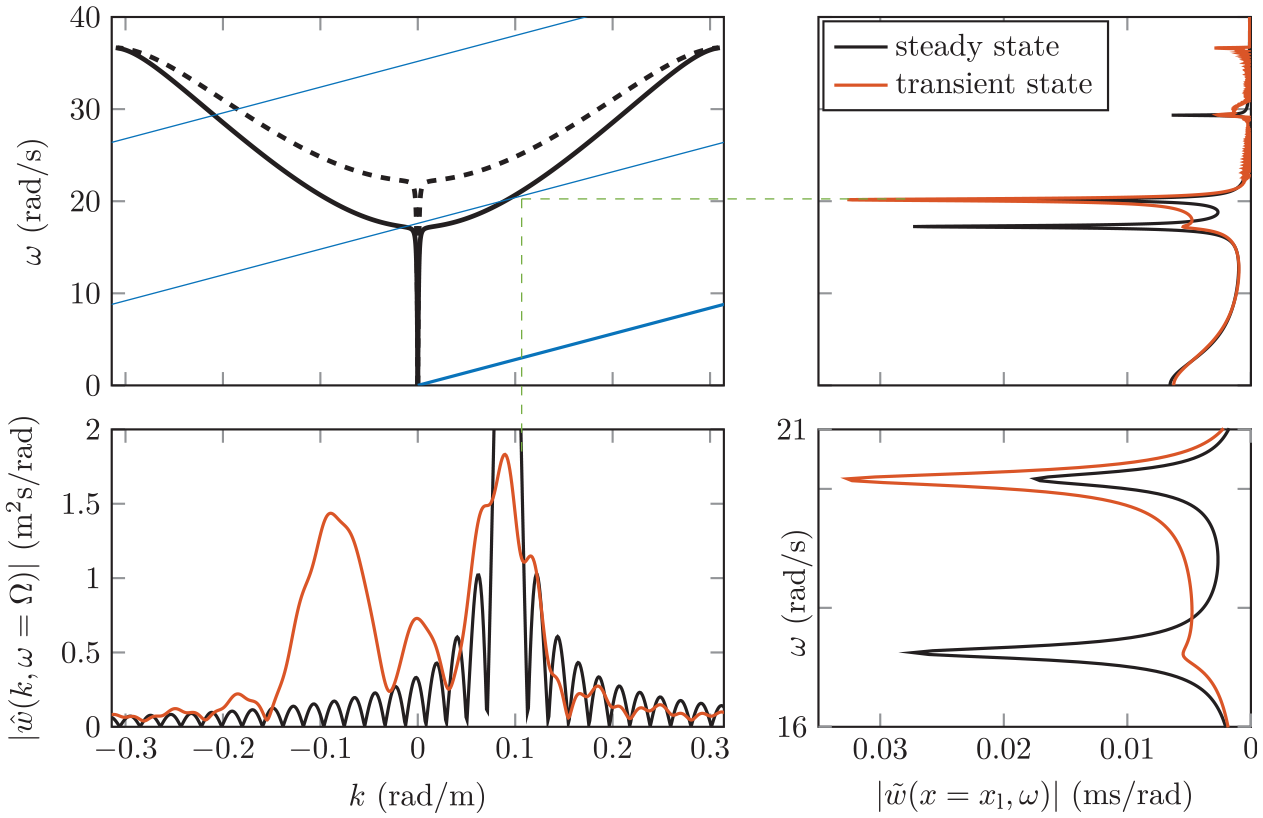
The primary dispersion curves for the soft (black solid line) and stiff (black dashed line) regions and the kinematic invariants (blue lines) (top left panel;
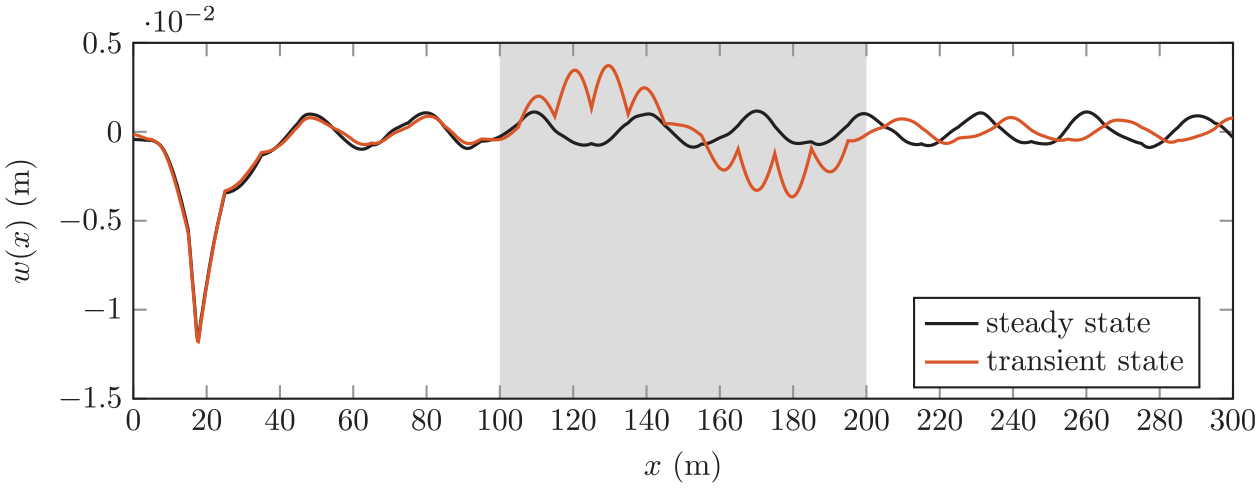
When looking to the right of the stiff zone, the opposite is occurring. Figure 6 shows that the first peak in the frequency spectrum is amplified while the second peak is almost completely eliminated in the transient response. A similar reasoning as above can be used to explain these observations. A general picture is obtained when looking at the time-domain response under the moving load, presented in Figure 7. The transient response is amplified significantly to the left and right of the stiff region.
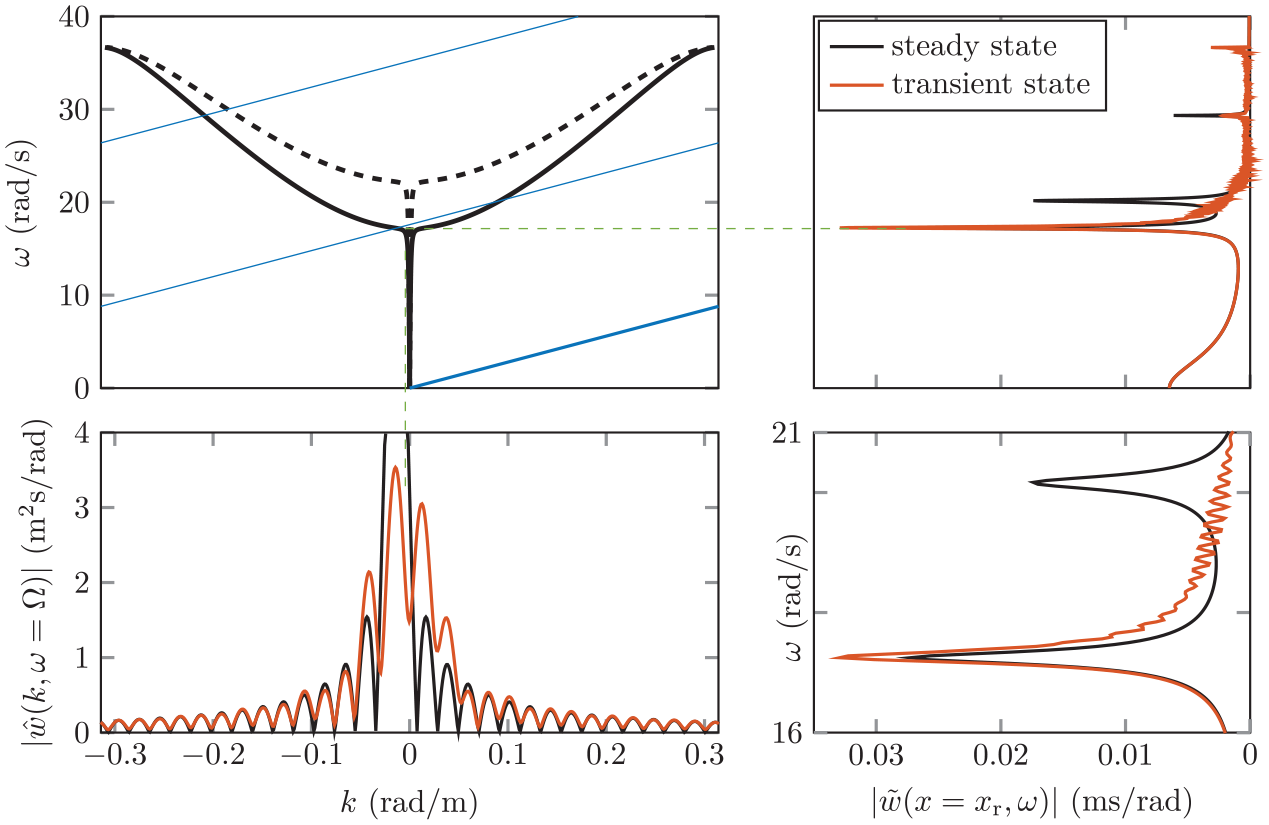
The primary dispersion curves for the soft (black solid line) and stiff (black dashed line) regions and the kinematic invariants (blue lines) (top left panel;
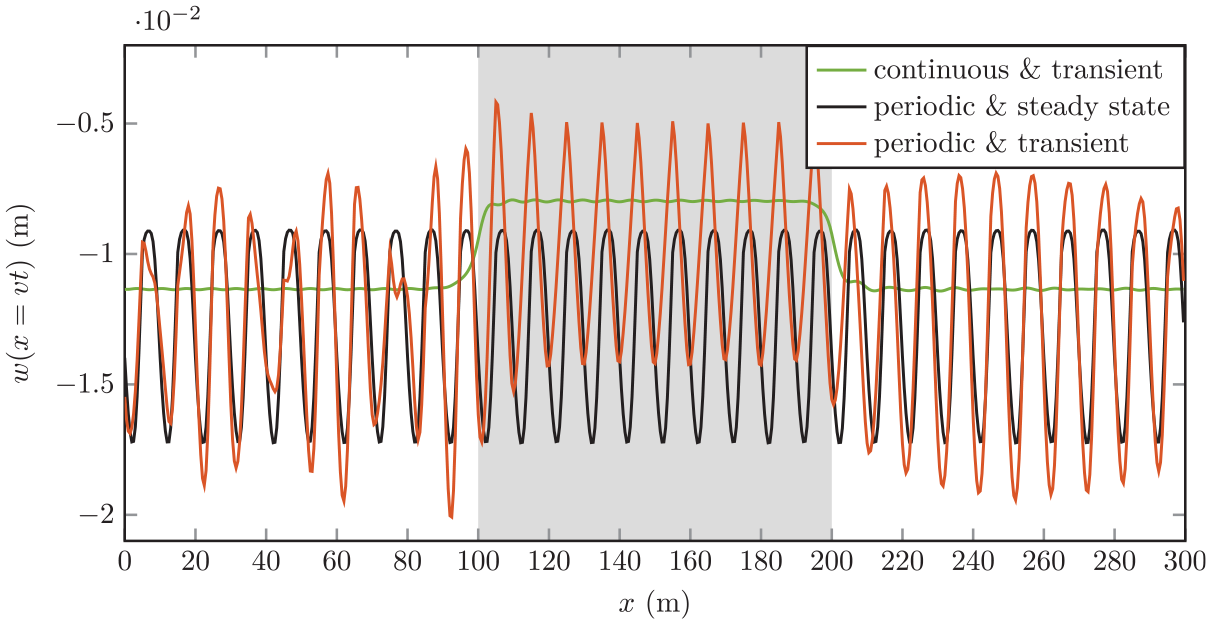
The displacement evaluated under the moving load for the wave-interference phenomenon; the location of the stiff zone is indicated by the grey background.
The response for the equivalent continuously supported system with a transition zone is also presented to show, that in that case, there is no visible amplification (due to the relatively low velocity). It is now clear that this significant amplification is caused by the periodicity of the system together with the transition zone; if any of these two characteristics are removed, the amplification vanishes.
The question arises how this mechanism is affected by the length of the stiff zone. If the stiff zone has a very short length, the tunnelling effect (similar to the quantum tunnelling [31]) can occur leading to energy being tunnelled to the soft domain to the right of the stiff zone. As a short investigation, we consider the same system, but an incident wave coming from the left is used instead of the moving load. The solution to that problem (cf. equations (15)–(19)) reads



where
Figure 8 presents the coefficients
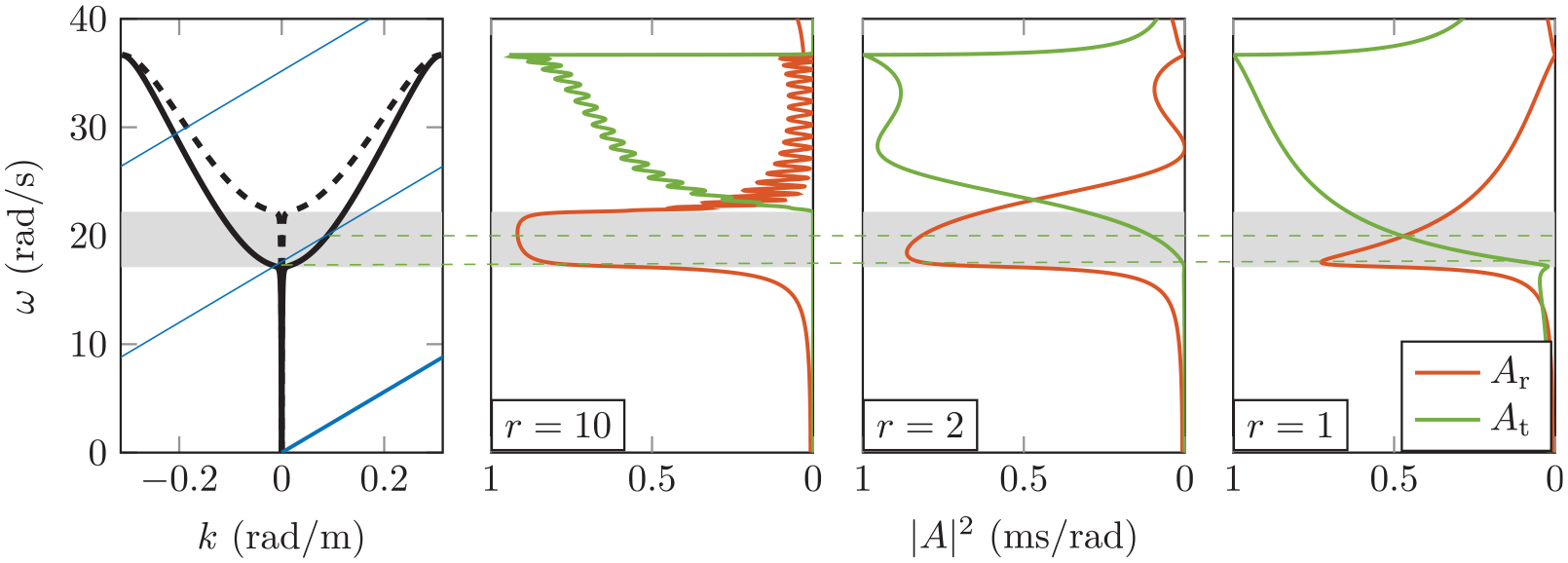
The primary dispersion curves for the soft (black solid line) and stiff (black dashed line) regions and the kinematic invariants (blue lines) (left panel;
Snapshot of the displacement fields (top panel) and the displacements under the moving load (bottom panel) for a short stiff zone (
Returning to the problem with the moving load, the frequencies of the two dominant waves excited by the moving load (in the scenario studied previously; see Figure 5) are both in between the cut-off frequencies of the two domains. For a large
It is important to mention that the wave-interference phenomenon is not sensitive to the stiffness difference between the stiff and soft domain, provided that the generated waves are in the pass band of the stiff zone. Simulations have been performed also for
4.2. Passing from non-resonance velocity to a resonance velocity
As discussed in Section 3, there are several load velocities that can lead to resonance in the periodic system. When designing the catenary system, its properties should be chosen such that these resonance velocities are far away from operational velocities of trains. However, even if the operational velocity is far from resonance velocities outside transition zones, it can be close to a resonance velocity inside the stiff region of the transition zone if this is not designed having this criterion in mind. In this section, the situation is investigated in which the load passes from non-resonance velocity in the soft region to a resonance velocity inside the stiff region. Note that the velocity of the load is kept constant and just the velocity at which resonance occurs changes due to a change of the support stiffness.
Figure 10 presents the resonance velocities for the soft and stiff regions (here the stiffness ratio is
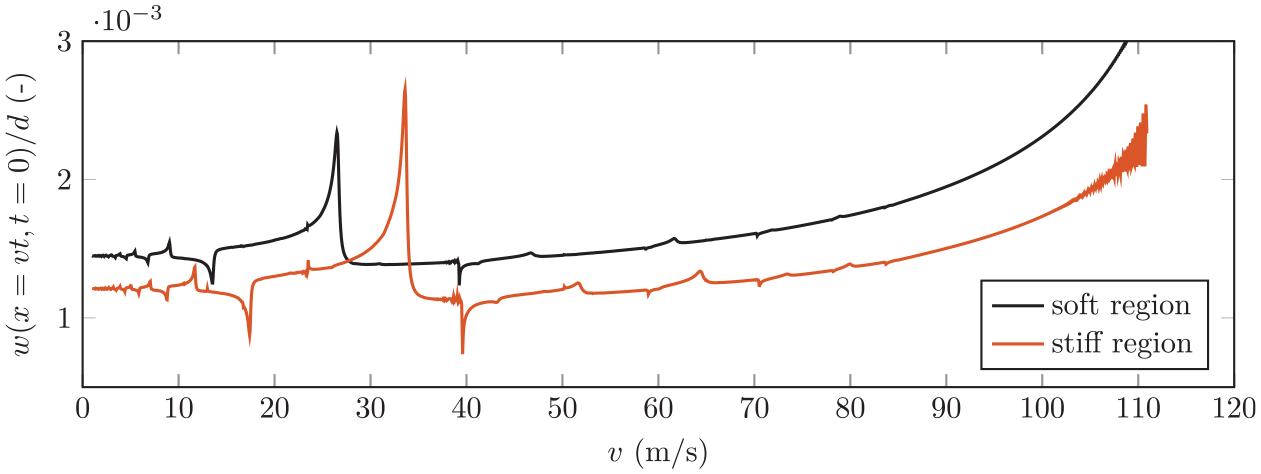
Load velocities that lead to resonance in the soft and stiff regions: normalized displacement under the moving load at
The primary dispersion curves for the soft (black solid line) and stiff (black dashed line) regions and the kinematic invariants (blue lines) (top left panel;
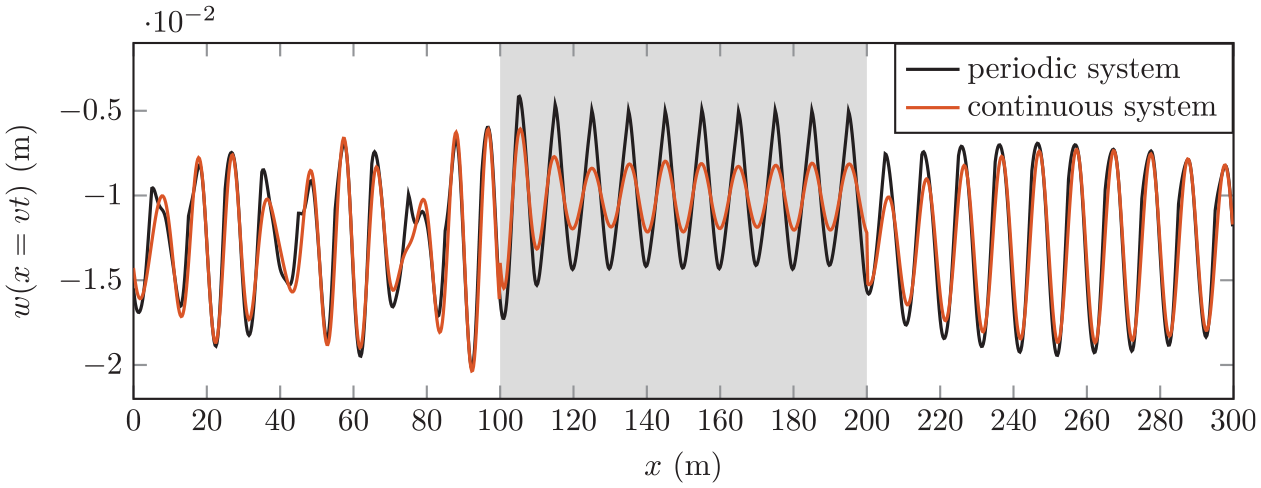
Figure 12 presents the displacement under the moving load. The amplification in the stiff zone is observed clearly with a drastic increase compared to the response in the soft region. The increase in response requires a few cell lengths to develop, characteristic to resonance; for short stiff zones, resonance might not have time to develop, but for longer ones, strong response amplification can develop.
The displacements evaluated under the moving load for the resonance velocity in the stiff zone; the location of the stiff zone is indicated by the grey background.
It is important to mention that the phenomenon of passing to resonance velocity has an equivalent in the continuously supported system subject to a moving constant load, but there are important distinctions. First, in the continuous system, resonance can only occur at the critical velocity (the boundary between sub-critical and super-critical velocities) that usually is much larger than the operational train velocities. For example, the continuous system equivalent to the periodic one considered in this section has a critical velocity of around 115 m/s while the velocity that leads to the considered resonance in the stiff region is 33.5 m/s. Second, to go from sub-critical to critical velocity, the stiffness of the supporting structure needs to decrease (if all other parameters are kept constant); this is much less common in practice because transition zones are usually regions with stiffer structures.
4.3. Wave trapping inside the stiff zone
The stiff zone has a finite length
An approximate condition for wave trapping is that

where
From relation (24) the wavenumber

In order to find the corresponding frequency, the wavenumber in the first Brillouin zone is chosen because the waves with most energy generated by the moving load are located in the first pass band (the higher harmonics have significantly less energy) and the first Brillouin zone. The frequency

A wave with wavenumber

Clearly, the wave with wavenumber

The frequency and wavenumber spectra evaluated at a position inside the stiff zone are presented in Figure 13. The frequency spectrum of the transient response exhibits a large peak at
The primary dispersion curves for the soft (black solid line) and stiff (black dashed line) regions and the kinematic invariants (blue lines) (top left panel;
Snapshot of the time-domain displacements for the situation when the wave is trapped in the stiff zone; the stiff zone is indicated by the grey background.
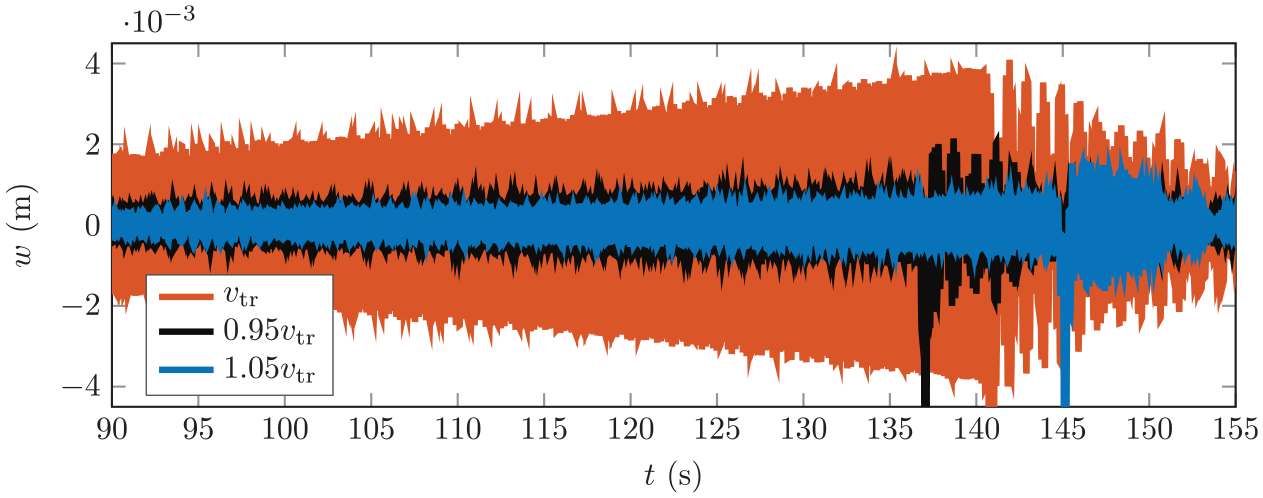
Displacement time history evaluated inside the stiff zone for slightly different load velocities.
5. Relation to the continuously supported system with a harmonic moving load
An easier problem to solve that could also capture the three phenomena discussed in Section 4 is the continuously supported string subject to a moving harmonic load. The solution of this problem can be obtained by applying the Fourier transform over time to the governing equations and solving the resulting ordinary differential equation in the Fourier-space domain. This has been done in, for example [28,33], for a moving constant load and can easily be extended to a moving harmonic load.
The frequency of the harmonic load can be chosen such that the first two peaks in the frequency spectrum (e.g. Figure 3) are accurately represented; by choosing
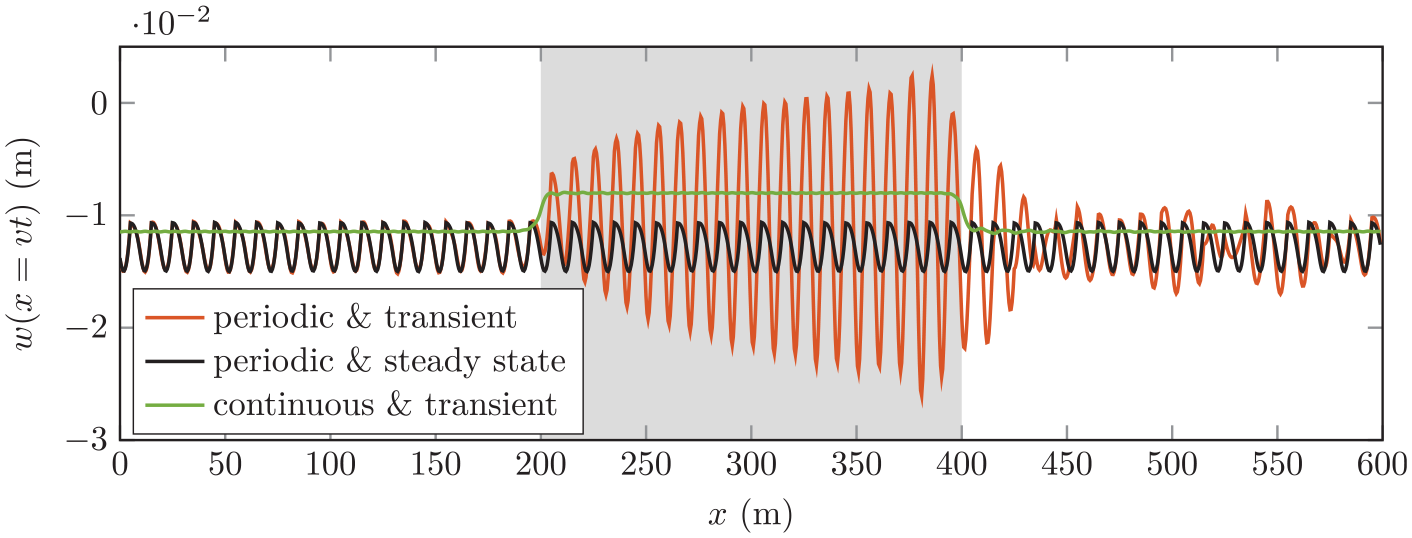
Figure 16 presents the comparison of the periodic and continuous systems. It can be seen that the frequency spectra of the two systems agree well for the first two peaks, and the continuous system does not exhibit more peaks than these two. One can introduce more peaks in the response of the continuous system by imposing multiple harmonic components to the moving load (i.e.
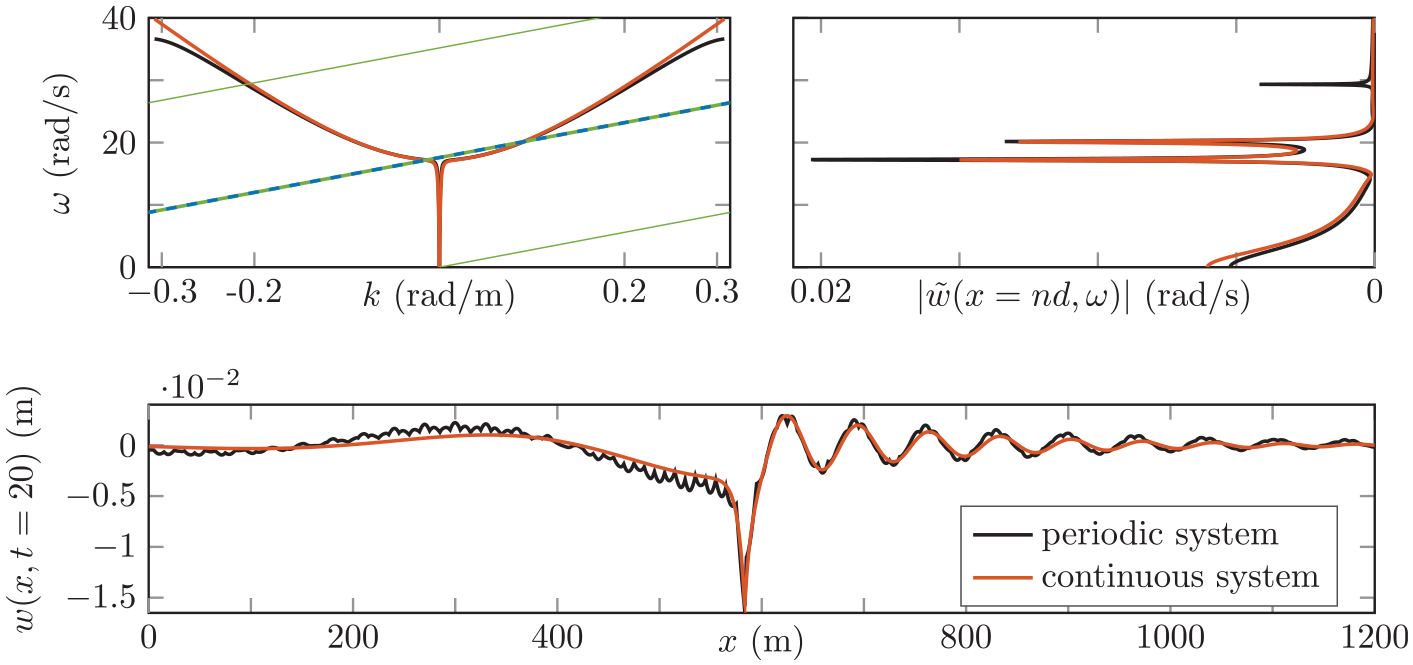
Comparison of the periodic system and continuous one; the dispersion curves and the kinematic invariants (top left panel), the frequency spectra of the steady-state displacements (top right panel), and a snapshot of the time-domain displacements (bottom panel).
First, when it comes to the wave-interference mechanism, Figure 17 shows that the transient response of the continuous system exhibits qualitatively the same behaviour as the periodic one. However, the response in the stiff region differs considerably between the two systems because parameters
Displacements evaluated under the moving load; the position of the stiff region is indicated by the grey background.
Second, for the wave-trapping phenomenon, Figure 18 shows that the continuous system exhibits a similar behaviour as the periodic one, and the agreement between the two is very good. If one wants to investigate this mechanism in detail, the continuous system can be an option. The fit between the transient responses can be further improved by changing the scaling factors
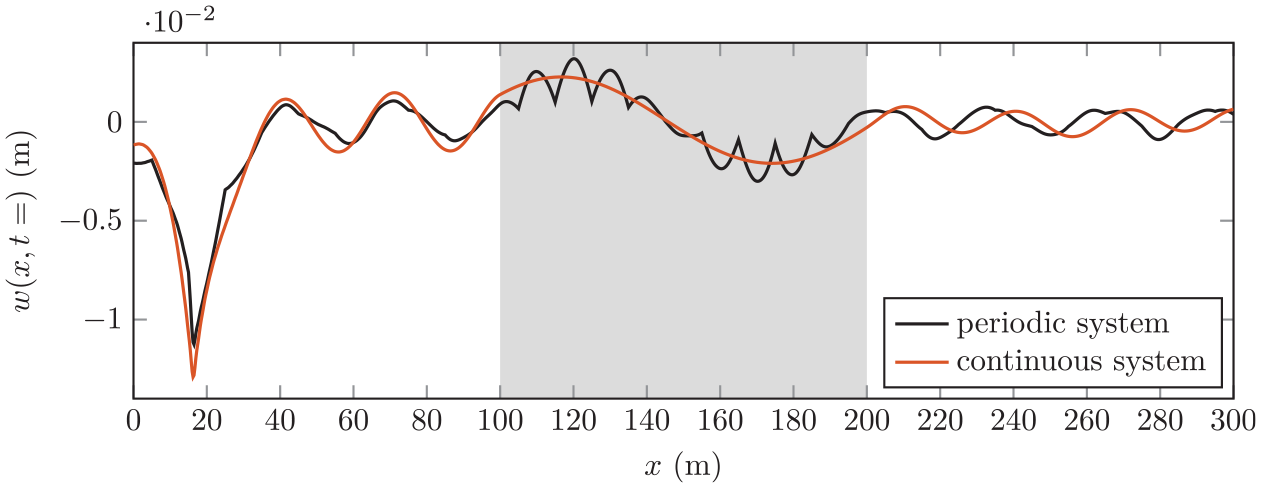
Snapshot of the time-domain displacements for the situation when the wave is trapped in the transition zone; the position of the stiff region is indicated by the grey background.
Finally, for passing from non-resonance velocity to resonance velocity, the continuous system cannot be used at all. The continuous system has one resonance velocity, the critical velocity; the value of that critical velocity is much higher than the one leading to resonance in Section 4.2. Consequently, this phenomenon can only be investigated in the periodic system.
6. Conclusion
This paper investigated three phenomena that can lead to response amplification in a continuous and periodic system with a local inhomogeneity (i.e. a transition zone) described by an increase in support stiffness. These phenomena are investigated using an infinite string periodically supported by discrete springs and dashpots, acted upon by a moving constant load; this model is representative of a catenary system in railway tracks. Nonetheless, the phenomena described in this paper can occur also in other continuous and periodic systems, such as a beam and membrane. The phenomena are the product of a periodic system and a local inhomogeneity, and if one of these characteristics is omitted, the phenomena will not occur.
The first phenomenon is the wave interference that can lead to response amplification to the left and to the right of the stiff region. The waves generated by the moving load outside the transition zone are reflected almost entirely by the stiff region if one of the frequencies of the waves are located in a stop band of the stiff region. This almost complete reflection leads to wave interference close to the moving load, which in turn leads to response amplification. Results show that this mechanism is of importance when the velocity of the load is slightly higher than one of the resonance velocities in the soft regions. For small lengths of the stiff zone energy can be tunnelled to the soft domain causing a reduction in the reflection coefficient which in turn leads to a reduced amplification.
The second phenomenon is the passing from non-resonance velocity in the soft region to a resonance velocity in the stiff region. This causes resonance to occur inside the stiff region leading to a drastic amplification of the response mainly inside the stiff region. Results show that this mechanism leads to the biggest response amplification between the three phenomena.
The third phenomenon is the wave trapping inside the stiff region. For specific values of the wavenumber and frequency of the waves generated in the soft region, waves can get trapped inside the stiff zone potentially leading to response amplification around and inside the stiff zone. Results show that this mechanism leads to amplification inside the stiff region even when the moving load is relatively far away from it. However, for reasonable values of damping, this mechanism is not as pronounced as the other two.
The possibility of capturing these phenomena using a simpler model, a continuously supported string acted upon by a moving harmonic load, was also studied. The wave-interference and wave-trapping phenomena observed in the periodic system can be seen in the continuous system too, while the resonance phenomenon cannot be replicated using the continuous model. To obtain similar results for the continuous system, the static and harmonic components need to be tuned to the steady-state response of the periodic system. Once this tuning is satisfactory, the transient responses match quite well and the two phenomena are qualitatively well captured. However, the tuning parameters, in principle, are not known before-hand and need to be updated for each change of the system properties, which makes it difficult to use the continuous system in practical situations.
Finally, the amplification of stresses and displacements in the transition zones can lead to numerous fatigue and wear problems in the catenary system and in the energy collector of the train. Moreover, accounting for the low (mean) contact force between wires and carbon strip, the dynamic response of the system can also lead to force fluctuations that are large enough to cause arching (occurs when the contact force is too low) or loss of contact. The three investigated phenomena can be considered as additional constraints for the design parameters at transition zones such that amplifications are avoided, especially because all three phenomena occur in the range of operational train speeds.
Footnotes
Appendix 1
Here we present a detailed derivation of the dispersion equation (equation (12)) and of the kinematic invariant (equation (14)). For clarity of the derivations, a system without damping is considered.
First, the dispersion curve is derived. The eigenvalues
The determinant of the Floquet matrix is 1, and, thus, the eigenvalues of the Floquet matrix read
where
Depending on the frequency (
This leads to the following set of conditions for the Floquet wavenumber
If the first condition in equation (33) is satisfied, then the second one is also satisfied. Any of the two conditions can be selected as the dispersion equation (we selected the first one due to its concise form).
Second, the kinematic invariants are derived. The kinematic invariants ensure phase equality of the emitted harmonic waves and the load at the contact point [10]. The phase of a harmonic wave with frequency
The phase of a harmonic wave is constant for an observer moving together with the wave, resulting in the following relation between frequency and wavenumber:
The change of position with time (i.e.
This is the kinematic invariant for a homogeneous system (without periodic supports) subject to a moving constant load. For the system studied in this paper (continuous system with discrete and periodic supports), a harmonic wave (with phase given by equation (34)) is not a solution of the equation of motion; the equation of motion allows for solutions in the shape of summations of harmonic waves that have the following expression for the phase:
where
This expression is analogous to equation (14).
Appendix 2
Here we show why the branch of the dispersion curve of the periodic system closest to the dispersion curve of the unsupported string leads to more energetic waves than the other branches. One might think that all information is just repeated from one Brillouin zone to the next (like for discrete periodic systems), but that is not completely correct for a continuous system. Let us consider a wave field propagating in positive
The displacement inside the generic cell can be calculated using equation (8) without the particular solution, as follows:
where
Provided that the sign of the imaginary part of
where
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research is supported by the Dutch Technology Foundation TTW (Project 15968), part of the Netherlands Organization for Scientific Research (NWO), and which is partly funded by the Ministry of Economic Affairs.