This work presents a self-contained continuum formulation for coupled chemical, mechanical, and thermal contact interactions. The formulation is very general and, hence, admits arbitrary geometry, deformation, and material behavior. All model equations are derived rigorously from the balance laws of mass, momentum, energy, and entropy in the framework of irreversible thermodynamics, thus exposing all the coupling present in the field equations and constitutive relations. In the process, the conjugated kinematic and kinetic variables for mechanical, thermal, and chemical contact are identified, and the analogies between mechanical, thermal, and chemical contact are highlighted. Particular focus is placed on the thermodynamics of chemical bonding distinguishing between exothermic and endothermic contact reactions. Distinction is also made between long-range, non-touching surface interactions and short-range, touching contact. For all constitutive relations, examples are proposed and discussed comprehensively with particular focus on their coupling. Finally, three analytical test cases are presented that illustrate the thermo-chemo-mechanical contact coupling and are useful for verifying computational models. Although the main novelty is the extension of existing contact formulations to chemical contact, the presented formulation also sheds new light on thermo-mechanical contact, because it is consistently derived from basic principles using only a few assumptions.
Many applications in science and technology involve coupled interactions at interfaces. An example is the mechanically sensitive chemical bonding appearing in adhesive joining, implant osseointegration, and cell adhesion. Another example is the thermal heating arising in frictional contact, adhesive joining, and electrical contacts. Further examples are the temperature-dependent mechanical contact conditions in melt-based production technologies, such as welding, soldering, casting, and additive manufacturing. A general understanding and description of these examples requires a general theory that couples chemical, mechanical, thermal, and electrical contact. Such a theory is developed here for the first three fields in the general framework of nonlinear continuum mechanics and irreversible thermodynamics. Two cases are considered in the theory: touching contact and non-touching interactions. Although the former is dominating at large length scales, the latter provides a link to atomistic contact models.
There is a large literature body on coupled contact models. General approaches deal, however, with two-field and not with three-field contact coupling, such as is considered here. General thermo-mechanical contact models have appeared in the early 1990s, starting with the work of Zavarise et al. [1] that combined a frictionless contact model with heat conduction. Following that, Johansson and Klarbring [2] presented the full coupling for linear thermo-elasticity. This was extended by Wriggers and Miehe [3] to large deformations using an operator split technique for the coupling: a staggering scheme based on successively solving mechanical and thermal subproblems. Oancea and Laursen [4] extended this to a monolithical coupling formulation and proposed general constitutive models for thermo-mechanical contact. Following these initial works, many thermo-mechanical contact studies have appeared, studying the extension to wear [5–7], rough-surface contact [8], multiscale contact [9–11], and adhesion [12]. Beyond that, there have also been many advancements in the computational description of thermo-mechanical contact [13–24].
General chemo-mechanical contact models go back even further, to the work of Derjaguin et al. [25] that describes molecular, e.g., van der Waals, adhesion between an elastic sphere and a half-space. Argento et al. [26] then extended this approach to a general surface formulation for interacting continua. The work was then generalized to a nonlinear continuum mechanical contact formulation by Sauer [27] and Sauer and Li [28,29]. Subsequently, the framework was applied to the study of cell adhesion [30], generalized to various surface interaction models [31], and combined with sliding friction models [32]. In a strict sense, the chemo-mechanical contact models mentioned so far are not coupled models. Rather, the chemical surface interaction is described by distance-dependent potentials. Hence, the resulting problem is a single-field problem that only depends on deformation. A second field variable representing the chemical contact state is not used.
This is different to the debonding model of Frémond [33]. There a state variable is introduced in order to describe irreversible damage during debonding. It is essentially a phenomenological debonding model, where the bond degrades over time following a first-order ordinary differential equation (ODE). Raous et al. [34] extended the model to sliding contact and implemented it within a finite element formulation. Its finite element implementation was also discussed in Wriggers [35] in the framework of large deformations. Subsequently the model has been extended to thermal effects [36], applied to multiscale contact [37], and generalized to various constitutive models [38], among others. Even though the Frémond model is a coupled two-field model, it only describes debonding and not bonding. It therefore does not provide a general link to chemical contact reactions.
The adhesion and debonding models mentioned so far are similar to cohesive zone models (CZMs). They propose phenomenological traction-separation laws for debonding, that are often derived from a potential, such as the seminal model of Xu and Needleman [39], thus ensuring thermodynamic consistency. CZMs have been extended to thermo-mechanical debonding through the works of [40–45], among others. Recently, CZMs have also been coupled to a hydrogen diffusion model in order to study fatigue [46]. CZMs usually have a damage/degradation part that sometimes follows from an evolution law, see, e.g., Willam et al. [41]. This makes them very similar to the Frémond model [33]. Like the Frémond model, CZMs have not yet been combined with chemical contact reactions, and so this aspect is still absent in general contact models.
Adhesion models based on chemical bonding and debonding reactions have been developed by Bell and coworkers in the late 1970s and early 1980s in the context of cell adhesion [47, 48]. Many subsequent works have appeared based on these models, for example to study substrate adhesion [49], strip peeling [50], nanoparticle endocytosis [51], sliding contact [52], cell nanoindentation [53], cell migration [54], cell spreading [55], focal adhesion dynamics [56], and substrate compliance [57], among others. Similar chemical bonding models have also been used to describe sticking and sliding friction, see [58]. The Bell model is an ODE for the chemical reaction. Assuming separation of chemical and mechanical time scales, this can be simplified into an algebraic equation that describes chemical equilibrium [59]. Even though Bell-like models have been combined with contact-induced deformations in several of the works mentioned previously, the contact formulations that have been considered in those works are not general continuum mechanical contact formulations as will be considered here.
Another related topic is the field of tribochemistry that is concerned with the growth of so-called tribofilms during sliding contact. Chemical evolution models are used to describe the tribofilms in the framework of elementary contact models, see, e.g., Andersson et al. [60] and Ghanbarzadeh et al. [61]. There is also a review article on how mechanical stresses can affect chemical reactions at the molecular scale [62]. However, none of these works use general continuum mechanical contact formulations.
Chemical contact reactions can be described by a state that follows from an evolution law of the kind . Mathematically, they are thus similar to the description of contact ageing [63–65], contact wear [5, 6, 15], and contact debonding [33, 34]. The thermodynamics is, however, very different.
None of the present chemo-mechanical models is a general contact model accounting for the general contact kinematics, balance laws, and constitutive relations. This motivates the development of such a formulation here. To the best of the authors’ knowledge, it is the first general thermo-chemo-mechanical contact model that accounts for large-deformation contact and sliding, chemical bonding and debonding reactions, thermal contact, and the full coupling of these fields. It is derived consistently from the general contact kinematics, balance laws and thermodynamics, introducing constitutive examples only at the end. Its generality serves as a basis for computational formulations and later extensions such as membrane contact or thermo-electro-chemo-mechanical contact.
The novelties of the proposed formulation can be summarized as follows. The formulation:
derives a self-contained, fully coupled chemical, mechanical and thermal contact model;
accounts for general non-linear deformations and material behavior;
consistently captures all the coupling present in the interfacial balance laws;
highlights the similarities among chemical, mechanical, and thermal contact;
obtains the general material-independent constitutive contact relations;
provides several interface material models derived from the second law of thermodynamics;
is illustrated by three elementary contact solutions.
Chemical reactions here are restricted to reactions across the contact interface. In this, two assumptions are made: (1) that the reaction rate is much higher than any sliding rate; and (2) that there is no tangential diffusion of bonds on the contact surface. Reactions inside the bodies and on their free surfaces, that can also occur without contact, are not considered in this study.
The remainder of this paper is organized as follows: Section 2 presents the generalized continuum kinematics characterizing the mechanical, chemical, and thermal contact behavior. The kinematics are required in order to formulate the general balance laws that govern the coupled contact system in Section 3. Based on these laws the general constitutive relations are derived in Section 4. Section 5 then gives several coupled constitutive examples satisfying these relations. In order to illustrate these, Section 6 provides three analytical test cases for coupled contact. The paper concludes with Section 7.
2. Continuum contact kinematics
This section introduces the kinematic variables characterizing the mechanical, thermal, and chemical interaction between two deforming bodies , , following the established developments of continuum mechanics [66] and contact mechanics [35, 67]. The novelty here consists in their contrasting juxtaposition. A list of all the important field variables appearing here is provided in the appendix.
The primary field variables are the current mass density , current surface bonding site density , current position , current velocity , and current temperature that are all functions of space and time. Here, the spatial dependency is expressed through the initial position , and the dot denotes the material time derivative
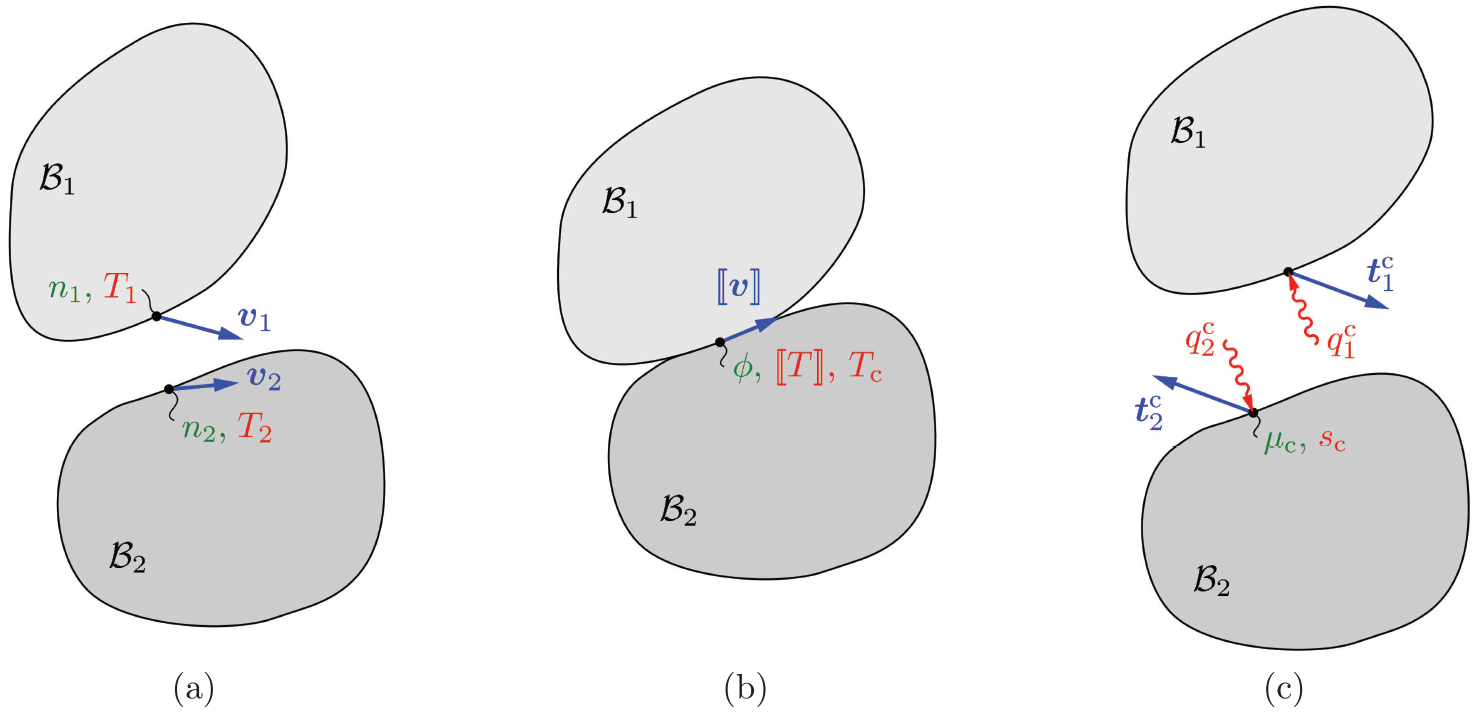
The two bodies can come into contact and interact mechanically, thermally, and chemically on their common contact surface , see Figure 1. In case of long-range interaction, such as van der Waals adhesion, they may also interact when not in direct contact. In this case, interaction is considered to take place on the (non-touching) surfaces regions .1
Continuum contact description: (a) bodies before contact; (b) bodies in contact; (c) free-body diagram for contact. Here, , , and denote the bonding site density, velocity, and temperature, respectively, on the contact surface of body () at time . During contact, denotes the degree of bonding, the velocity jump, the temperature jump, the contact temperature, the contact tractions, the heat influx, the chemical contact potential, and the contact entropy. Here and are associated with an interfacial medium.
The deformation within each body is characterized by the deformation gradient
from which various strain measures can be derived, such as the Green–Lagrange strain tensor
The deformation generally contains elastic and inelastic contributions that lead to the additive strain decomposition2
An example for an inelastic strain is thermal expansion. From also follows the quantity
which governs the local volume change
at between undeformed and deformed configuration. Similarly, the local surface area change
at is governed by the quantity
where is the surface determinant on , see, e.g., [68].
Time-dependent deformation is characterized by the symmetric velocity gradient
also known as the rate of deformation tensor. The velocity also gives rise to the identities
and
where is the surface divergence on .
Mechanical interaction between the two bodies is characterized by the gap vector
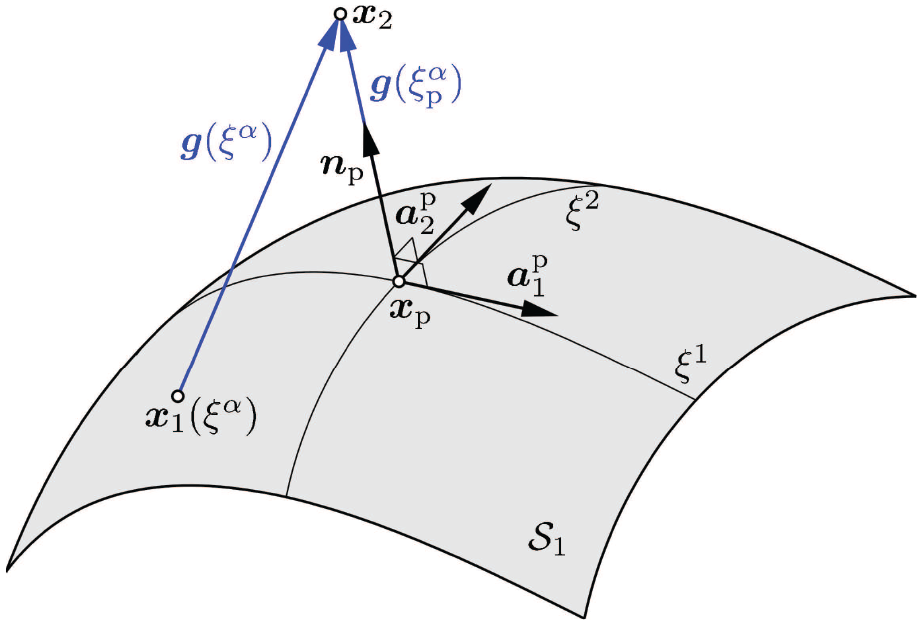
that is defined for all pairs and . Two cases have to be distinguished. (i) Both and are material points, a setting that is suitable for describing long-range interactions; or more generally (ii) one of the points is not necessarily a material point, a setting that arises when using a closest point projection suitable for short-range interactions. In the latter case, one surface, say , is designated the so-called master surface, whereas the other, , is designated the so-called slave surface [69]. The master surface is then used to define normal and tangential contact contributions. Therefore, the master point in (12) is determined as the closest point projection of slave point onto master surface . Parameterizing by the curvilinear surface coordinates , , the closest projection point is given by
where is the value of that solves the minimum distance problem
Here () are tangent vectors of , which at are denoted , i.e., . Likewise is the surface normal at . The closest point projection is illustrated in Figure 2.
Mechanical contact: computation of the contact gap via a closest point projection of slave point onto the master surface .
The gap can be decomposed into its normal and tangential parts
where the latter is zero at . Hence, for contact and , so that
Based on (12) and (13), the material time derivative of can also be written as
where, in agreement with definition (1), and . The latter part
(with summation implied over and often denoted ) is equal to the Lie derivative of the tangential gap vector [35]. Likewise (16) is equal to the Lie derivative of the normal gap vector. Here is zero when is fixed (such that ), i.e., when is a material point as in case (i) above. In case (ii), is equal to the relative tangential velocity between the two surfaces. Thus, also denotes the case of tangential sticking, while characterizes tangential sliding. The sliding motion is irreversible and accumulates over time. Combining (16) and (17), one can identify the velocity jump
and see that it is the Lie derivative of the total gap vector in case (ii). Even during sticking, it can be advantageous (see remark 2.2) to allow for (small) motion that is reversible upon unloading. This leads to the tangential velocity decomposition
where captures the reversible (elastic) motion during sticking, while captures the irreversible (inelastic) motion during sliding. Plugging (20) into (19) yields
where characterizes normal contact and tangential sticking, whereas characterizes tangential sliding. Decomposition (21) is analogous to decomposition (4), making the contact kinematics analogous to the kinematics of the bodies. It contains (19) for the case . Expressions for and can be found, e.g., in [35].
Thermal contact is characterized by the temperature jump between surface points and ,
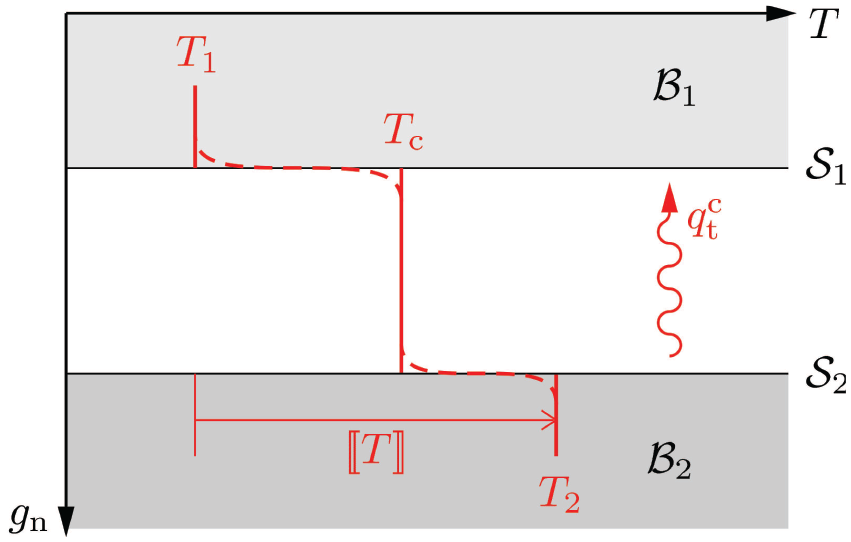
also denoted as the thermal gap [13], and the contact temperature that is associated with an interfacial medium, e.g., a lubricant or wear particles, see Figure 3. It is assumed that this medium is very thin, such that is constant through the thickness of the medium and can only vary along the surface.
Thermal contact: assumed temperature profile across the contact interface (along coordinate ). Thermal contact between two bodies is characterized by the temperature jump and the contact temperature associated with an interfacial medium. Here leads to the transfer heat flux identified in Section 4.3.
In order to characterize chemical contact, the bonding state variable is introduced on the contact surface, as discussed in the following section. It varies between for no bonding and for full bonding, and can be associated with a chemical gap (e.g., defined as ).
Table 1 summarizes the kinematic contact variables and their corresponding kinetic counterparts that will be discussed in later sections.
Energy-conjugated contact pairs
Field
Kinematic variable
Kinetic variable
Chemical
Bonding state
Chemical contact potential
Mechanical
Velocity jump
Contact traction
Thermal (gap)
Temperature jump
Contact heat influx
Thermal (medium)
Contact temperature
Contact entropy
Remark 2.1. Apart from the tangential sticking constraint , there is also the normal contact constraint . Normal and tangential contact are usually treated separately in most friction algorithms, but there are also unified approaches directly based on the gap vector , see, e.g., [70, 71]. Such an approach is also taken in the following sections.
Remark 2.2. There are reasons for relaxing the contact constraints and . One is to use a penalty regularization, which is typically simpler to implement than the exact constraint enforcement. Another is to use the elastic gap to capture the elastic deformation of (microscale) surface asperities during contact. In both cases is non-zero (but typically small) during contact.
Remark 2.3. The designation into master and slave surfaces introduces a bias in the contact formulation that can affect the accuracy and robustness of computational methods. The bias can be removed if alternating master/slave designations are used, as is done for 3D friction in [72, 73].
Remark 2.4. As shown previously, the Lie derivatives and only contain the relative changes of the normal and tangential gap. They do not contain the basis changes and . This makes the Lie derivative objective and a suitable quantity for the constitutive modeling [67], see Section 4.1.
3. Balance laws
This section derives the chemical, mechanical, and thermal balance laws for a generally coupled two-body system. The resulting equations turn out to be in the same form as the known relations for chemical reactions [74] and thermo-mechanical contact [67]. The novelty here lies in establishing their coupling and highlighting the similarities among the chemical, mechanical, and thermal contact equations. The derivation is based on the following three mathematical ingredients. The first is Reynolds’ transport theorem for volume integrals,
It follows from substituting (6) on the left, using the product rule, and then applying (10). Applied to surfaces, Reynolds’ transport theorem simply adapts to
It follows from substituting (7) on the left, using the product rule, and then applying (11).
The second ingredient is the divergence theorem,
where is the outward normal vector of boundary . The third ingredient is the localization theorem,
that can be equally applied to surface integrals.
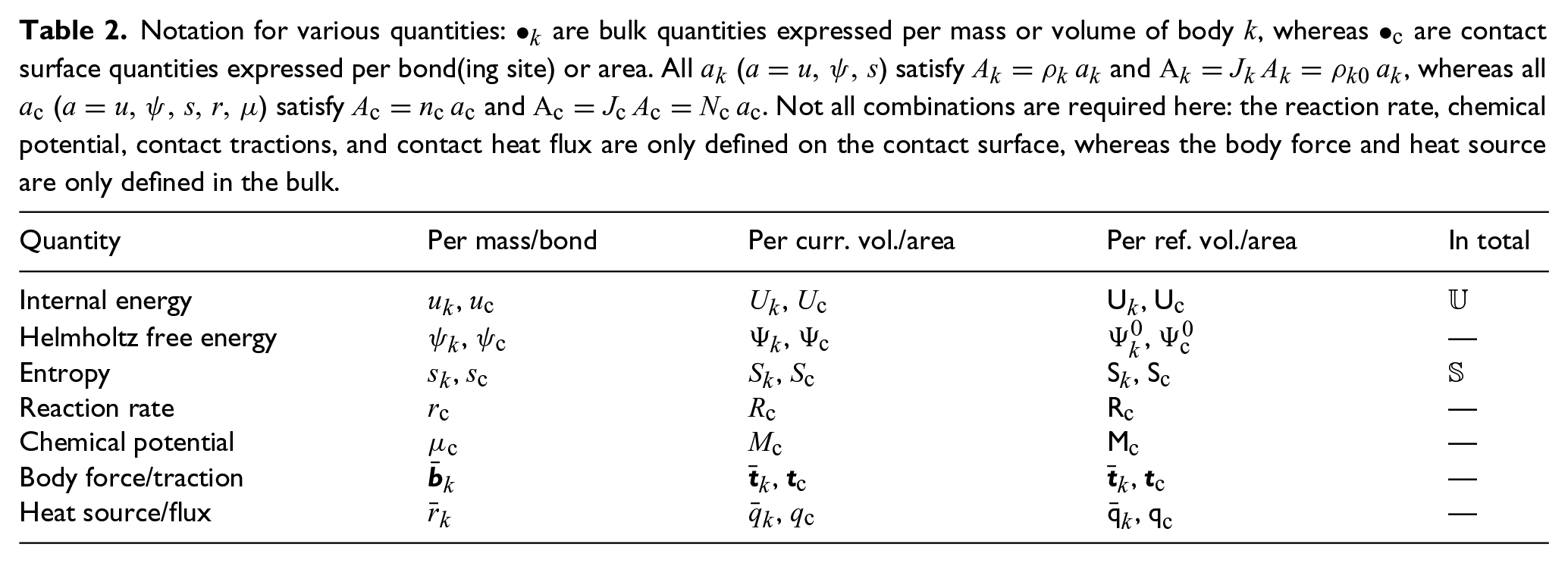
Some of the field quantities appearing in the following balance laws can be expressed per mass, bonding site, current volume, current area, reference volume, or reference area. The notation distinguishing these options is summarized in Table 2.
Notation for various quantities: are bulk quantities expressed per mass or volume of body , whereas are contact surface quantities expressed per bond(ing site) or area. All () satisfy and , whereas all () satisfy and . Not all combinations are required here: the reaction rate, chemical potential, contact tractions, and contact heat flux are only defined on the contact surface, whereas the body force and heat source are only defined in the bulk.
Quantity
Per mass/bond
Per curr. vol./area
Per ref. vol./area
In total
Internal energy
,
,
,
Helmholtz free energy
,
,
,
—
Entropy
,
,
,
Reaction rate
—
Chemical potential
—
Body force/traction
,
,
—
Heat source/flux
,
,
—
3.1. Conservation of mass and bonding sites
Assuming no mass sources, the mass balance of each body is given by the statement
Applying (23) and (26), this leads to the local balance law
Owing to (10), this ODE is solved by , where is the initial mass density.
In order to model chemical bonding, the interacting surfaces are considered to have a certain bonding site density (the number of bonding sites per current area) composed of bonded sites and unbonded sites, i.e.,
The number of bonding sites is considered to be conserved, i.e.,
implying
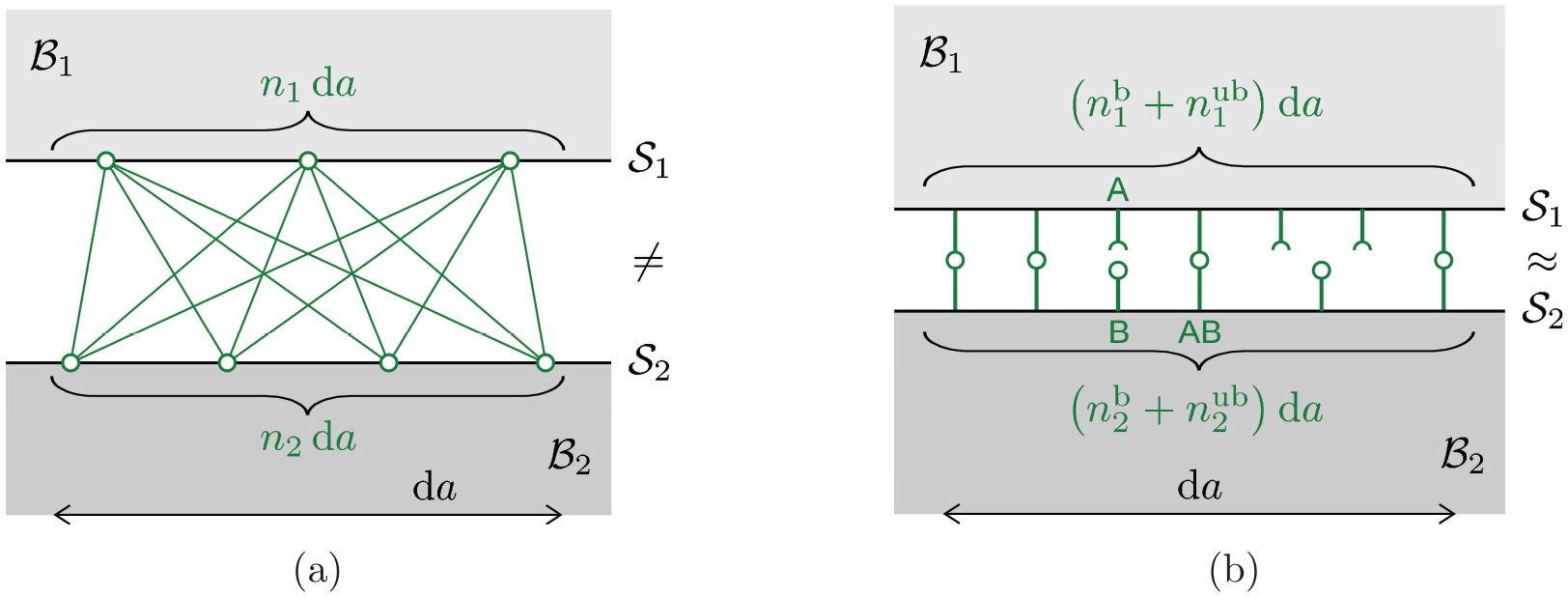
due to (24) and (26). Owing to (11), this ODE is solved by , where is the initial bonding site density. Two cases are considered in the following, see Figure 4. (a) Long-range interaction3 (between non-touching surfaces), where each bonding site on one surface can interact with all other bonding sites on the other surface. (b) Short-range interactions (between very close or even touching surfaces), where each bonding site on one surface can only bond to a single bonding site on the other surface.
Chemical contact interactions. (a) Long-range interactions between all bonding sites (e.g., molecules) of two non-touching surfaces. Here and . (b) Short-range bonding reactions between neighboring bonding sites A and B of two close surfaces. Here bonds have formed, whereas and sites are unbonded.
In the first case, we assume such that . Then no further equation is needed for . An example are van der Waals interactions described by the Lennard–Jones potential discussed in Section 5.3. In the second case, discussed in the remainder of this section, further equations are needed for . As the total number of bonded sites is the same on both surfaces in this case, we must have
If the two surfaces are very close, can be replaced by a common reference surface . Equation (32) then implies that due to localization (because (32) is still true for any subregion ). This case is considered in the following.
The evolution of is described by the chemical reaction
where AB denotes the bond, whereas A and B are its components on the two surfaces prior to bonding, see Figure 4(b). The bonding reaction is characterized by the reaction rate
composed of the bonding reaction rate (forward reaction) and the debonding reaction rate (backward reaction). An example for these is discussed in Section 5.7. Given , the balance law for the bonded sites (considering no surface diffusion) then follows as [75]
which gives
where is the common velocity required to enable chemical bonding. For the unbonded sites on the two surfaces, we have the two balance laws
leading to
where still (as long as ). Summing (36) and (38) leads to (31), and so one equation (for each ) is redundant.
For convenience, the non-dimensional phase field
is introduced, where is the reference value for the bonding site density, either picked as , in case surface 1 is taken as reference, or , in case surface 2 is taken as reference.4 Then (36) can be rewritten into
using (31). Equation (40) is the evolution law for the chemical contact state.
Remark 3.1. As we are focusing on solids, the derivation of (40) assumes no surface mobility (or diffusion) of the bonds. In the context of fluidic membranes, the surface mobility of bonds is usually accounted for, see, e.g., [76, 77].
Remark 3.2. In the derivation leading up to (31), has been used. However, it suffices to assume that the time scale of chemical reactions is much smaller than the timescale of sliding, such that the two reacting surfaces can be assumed stationary with respect to one another.
3.2. Momentum balance
The linear momentum balance for the entire two-body system is given by
where and are prescribed body forces and surface tractions. The latter are prescribed on the Neumann boundary that is disjoint from contact surface . The bonding events, described by Eq. (40), are not considered to affect the momentum of the system.
If the two bodies are cut apart, the additional contact interaction traction needs to be taken into account on the interface (see Figure 1). The individual momentum balance for every part () then reads
where is the traction on the surface that contains the cases
Applying (23), (25), and (26) leads to the corresponding local form
where is the Cauchy stress at that is defined by the formula
This simply states that the net contact forces are in equilibrium. It is the corresponding statement to (32) for mechanical contact. If the two surfaces touch, i.e., and , Equation (46) implies that
Hence, there is no jump in the contact traction. Such a jump only arises if an interface stress (e.g., surface tension) is considered.
The angular momentum balances for the individual bodies and the entire two-body system can be written down analogously to (42) and (41), respectively. As long as no distributed body and surface moments are considered, the angular momentum balance of each body has the well-known consequence (see [78]), whereas global angular momentum balance implies
analogously to (46). This statement is relevant for separated surfaces (), but, in the case of touching surfaces (), it leads to the already known traction equivalence (47) at common contact points .
Remark 3.3. In (47) the master surface is taken as reference surface for defining the reference traction , which is commonly done in mechanical contact formulations [35]. In case of chemical and thermal contact, however, the two possible choices or for the reference bonding site density introduced in (39) are maintained in this treatment.
3.3. Energy balance
The energy balance for the entire two-body system is
where the total energy in the system,
is given by the kinetic energy
and the internal energy
which accounts for the individual energies in and the contact energy . Here can describe long-range surface interactions, as discussed in Remark 3.6, or it can correspond to the energy of a third medium residing in the contact interface, e.g., a thin film of lubricants or wear particles. In the latter case, assuming a sufficiently thin film, can be expressed as the surface integral
where is the contact energy per bonding site on contact surface .5 Further, and in (49) denote external heat sources in and external heat influxes on , respectively. The Neumann boundary is considered disjoint from contact surface . An external heat source on the interface is not required here. As we show later, the present setup already accounts for the heat from interfacial friction and interfacial reactions.
If the two bodies are cut apart, the additional contact heat influx needs to be taken into account on the interface (see Figure 1), leading to the individual energy balance for each body
where and satisfies (43). Further, is the heat influx on surface that contains the cases
Introducing the heat flux vector at that is defined by Stokes formula
and using (45), the divergence theorem (25) can be applied to obtain
and
where is the symmetric velocity gradient from (9). Using (23), (26), and (44), the local form of (54) thus becomes
With this and (44), the combined balance statement (49) implies
which is the corresponding statement to (32) and (46) for thermal contact. Here
follows from (53) for bonding site conservation (30). If the two surfaces are very close or even touch, i.e., and (i.e., for very thin interfacial media), this implies that (because can be considered an arbitrary subregion of the contact surface)
due to (47). Equation (62) states that the energy rate and the mechanical contact power cause the heat influxes on . Equation (62) is equivalent to (6.63) of Laursen [67].6
Remark 3.4. Using (21), the contact power becomes
showing that it contains elastic and inelastic contributions associated with sticking and sliding, respectively. The first is associated with energy stored in the contact interface (defined by (82), later). This energy vanishes for an exact enforcement of sticking (). The second contribution causes dissipation, which is also zero in the case of sticking (because ) and in case of frictionless sliding (because ). In principle, the second contribution could also contain stored energy. In the context of plasticity such a stored energy occurs for hardening [79]. However, this is not considered here.
Remark 3.5. Note that in contrast to the contact tractions governed by (47), the contact heat flux according to (62) can have a jump across the interface. This has also been recently explored by [80].
Remark 3.6. For long-range interactions between two surfaces, can be written as7
where is an interaction energy defined between points on the two surfaces. For bonding site conservation (30) this leads to
in (60). Localization in the form of (62) is not possible for long-range interaction so that (60) then remains the only governing equation.
3.4. Entropy balance and the second law of thermodynamics
The entropy balance for the entire two-body system can be written as5
where the total entropy in the system,
accounts for the individual entropies in and the contact entropy that is associated with an interfacial medium. Further, and are the external and internal entropy production rates in , is the entropy influx on the heat flux boundary , and is the internal entropy production rate of the interface. An external entropy production rate is not needed for the interface, as long as no heat source is considered in the interface. Like in (53), and are bond-specific.
If the two bodies are cut apart, the additional contact entropy influx needs to be taken into account on the interface, leading to the individual entropy balances ()
where is the entropy influx on surface that contains the cases
Introducing the entropy flux in body defined by
theorems (23), (25), and (26) can be applied to (68) to give the local form
Plugging this equation into the total entropy balance (66) implies
This is the corresponding entropy statement to (32), (46), and (60). If the two surfaces touch, i.e., , it implies that
The second law of thermodynamics states that
In the absence of chemical contact, (73) then becomes equivalent to (6.66) of Laursen [67].
4. General constitution
This section derives the general constitutive equations for the two bodies and their contact interface, as they follow from the internal energy and the second law of thermodynamics. In general, the internal energy is a function of the mechanical, chemical and thermal state of the system that is characterized by the deformation, the bonding state and the entropy. Introducing the Helmholtz free energy, the thermal state can be characterized by the temperature instead of the entropy. The derivation uses the framework of general irreversible thermodynamics established in chemistry [74, 81–83] and mechanics [84] following the coupled thermo-mechanical treatment of Laursen [67] and the coupled chemo-mechanical treatment of Sahu et al. [75]. The novelty here is the extension to coupled thermo-chemo-mechanical contact leading to the establishment of the interfacial thermo-chemo-mechanical energy balance in (108), which is then discussed in detail.
4.1. Thermodynamic potentials
For each , the Helmholtz free energy (per mass),
is introduced as the chosen thermodynamic potential. Thus,
Inserting (59), then leads to
For the interface, the Helmholtz free energy (per bonding site) is introduced as
where is the interface temperature introduced in Section 2 (see Figure 1). Thus,
Inserting (62), then leads to
In this study, the Helmholtz free energy within is considered to take the functional form
where is the elastic Green–Lagrange strain tensor introduced by (4). For the interface, the Helmholtz free energy is considered to take the form
where is the elastic part of the gap as introduced by (21). From (81) and (82) follows
and
In (84) appears instead of (cf. [67, (6.72)]), because should be objective and, hence, not depend on the surface basis, i.e., and vanish. The following subsections proceed to derive the general constitutive equations for the two bodies and their interaction based on and .
4.2. Constitutive equations for the two individual bodies
Inserting (71) and (77) into the first part of (74), gives
As this is true for any , , , , and , we can identify the relations
for the external entropy source and the entropy flux. We are then left with the well-known dissipation inequality
which, in view of (4), (83), and
where is the second Piola–Kirchhoff stress, becomes
Here is the Helmholtz free energy per reference volume, and is the inelastic part of that is related to via (88). As (89) is true for any and , we find the constitutive relations
Inserting (83) and (90) back into (77) then leads to the entropy evolution equation
Here, the term can be understood as an effective heat source.
The equations in (90) are the classical constitutive equations for thermo-mechanical bodies. They happen to be very similar to the contact equations obtained in the following section.
Remark 4.1. The above derivation considers elastic and inelastic strain rates following from (4), which are analogous counterparts to the elastic and inelastic velocity jump, see (21), required for a general contact description. On the other hand, a decomposition of stress is not considered, which corresponds to a Maxwell-like model for the elastic and inelastic behavior. For other constitutive models, that are not considered here, elastic and inelastic stress contributions can appear and need to be separated.
Remark 4.2. Apart from constitutive equations (90) and the corresponding field equations (44) and (91), one also needs to determine the strain decomposition of (4). Hence, another equation is needed, e.g., an evolution law for the inelastic strain . A simple example is thermal expansion, where follows from temperature . Likewise, an evolution law for the inelastic gap will be needed, see, e.g., [35].
4.3. Constitutive equations for the contact interface
Next we examine the case that there is a common contact interface . Inserting (73) and (80) into the second part of (74) and using the second part of (86), we find
Further inserting (21) and (84), and introducing the nominal contact traction , we find
where and where
denotes the chemical potential associated with the interface reactions. Here, is the reference value for the area stretch, chosen analogously to in (39). As inequality (93) is true for any , , , and , we find the constitutive relations
for the contact tractions,
for the interfacial entropy,
for the reaction rate (from (40)), and
for the contact heat fluxes. Multiplying by , , and (that are all positive), the last statement can be rewritten into
As this has to be satisfied for any , setting either or yields the two separate conditions ()
for . They are, for example, satisfied for the simple and well-known linear heat transfer law
where the constant is the heat transfer coefficient between body and the interfacial medium. Introducing the mean influx into ,
such that and , one can also rewrite inequality (99) into
As this also has to be true for , we find the further condition
which is, for example, satisfied by
where the constant is the heat transfer coefficient between bodies and .
From (62) we can further find that the mean influx is given by
which in view of (21), (79), (84), the first part of (95), and (96) becomes
i.e., the mean heat influx is caused by mechanical dissipation (from friction), chemical dissipation (from reactions), and entropy changes at the interface. The three terms are composed of the conjugated pairs identified in Table 1. Although the first two terms are always positive (due to the second part of (95) and (97)) and, thus, lead to an influx of heat into the bodies, the third term can be positive or negative. It, thus, allows for a heat flux from the bodies into the interface, where the heat is stored as internal energy, see the example in Section 6.2.2. Defining the contact enthalpy per bonding site from
which is the logical extension of the classical enthalpy definition,8 one finds
based on the Lie derivative of (19). Thus, the mean heat influx is proportional to the enthalpy change at constant nominal contact traction. Following the classical definition [85], the contact reactions can thus be classified according to
in case there is no heat coming from mechanical dissipation (). Corresponding examples are given in Section 6.2.
Remark 4.3. Interface equation (108) is analogous to the bulk equation (91). While (91) describes the entropy evolution in each body, (108) describes the entropy evolution of the contact interface. In case of transfer law (101), this evolution law explicitly follows from (102) and (108) as
Like (91), it can be rewritten as an evolution law for the temperature using the entropy-temperature relationship, i.e. (96). The analogy between (91) and (108) is not complete, as (91) contains an explicit heat source, whereas (108) contains a chemical dissipation term. In principle, an explicit heat source can also be considered on the interface, whereas a chemical reaction can also be considered in the bulk. This would lead to a complete analogy between (108) and (91). In the absence of chemical reactions, (108) resorts to the thermo-mechanical energy balance found in older works, see see [2, 4, 5].
Remark 4.4. A special case is (for example, because there is no interfacial medium), see the example in Section 6.2.1. In this case , such that (108) becomes , which is not an evolution law for anymore, but just an expression for the energy influx into and .
Remark 4.5. According to (108), equal energy flows from the interface into bodies and . The transfer heat flux then accounts for the possibility that the bodies heat up differently. Alternatively, as considered in [13, 16, 18], factors can be proposed for the relative contributions going into the two bodies. The work in [16] also accounts for a loss of the interface heat to other bodies, such as an interfacial gas.
Remark 4.6. The nominal traction is not a physically attained traction. Only the traction is. As , one can also write , for .
Remark 4.7. Multiplying (108) by the area change yields
where and are the contact entropy and chemical potential per reference area. Owing to , (94), and (96), they follow directly from
Remark 4.8. Alternatively to transfer laws for and , such as (101), one can also propose laws for and . Examples are given by (106) and
for some , as they satisfy condition (104).
Remark 4.9. In case and relation (101) holds, explicitly follows from (102) as
One can then find the well-known relation from (103) and (106), which also has to be true for in case all are constants.
Remark 4.10. In case of perfect thermal contact , the fluxes and become the unknown Lagrange multipliers to the thermal contact constraints and . Alternatively, and can be used as the Lagrange multipliers to the constraints and .
4.4. Constitutive equations for non-touching (non-dissipative) interactions
In case of non-touching (long-range) interactions, the two surfaces remain distinct, i.e., . For simplification we consider that the surfaces have the uniform temperatures and , and that the space between and has no mass, temperature or entropy, i.e., . Further, because the surfaces do not touch, no bonding can take place, i.e., . The Helmholtz free energy of the interface then is
so that . The Helmholtz free energy is now considered to take the form
such that
Inserting this into (60) yields
where
Noting that and are arbitrary and can be independently taken as zero, we find
for the interaction tractions, and
for the interaction heat fluxes. At the same time (72) and the second part of (74) yield
If the temperature is constant, one can multiply this by and insert (123) to get
which is the corresponding statement to (105) for long-range interactions. The traction laws in (122) are identical to those obtained from a variational principle [31].
5. Constitutive examples for contact
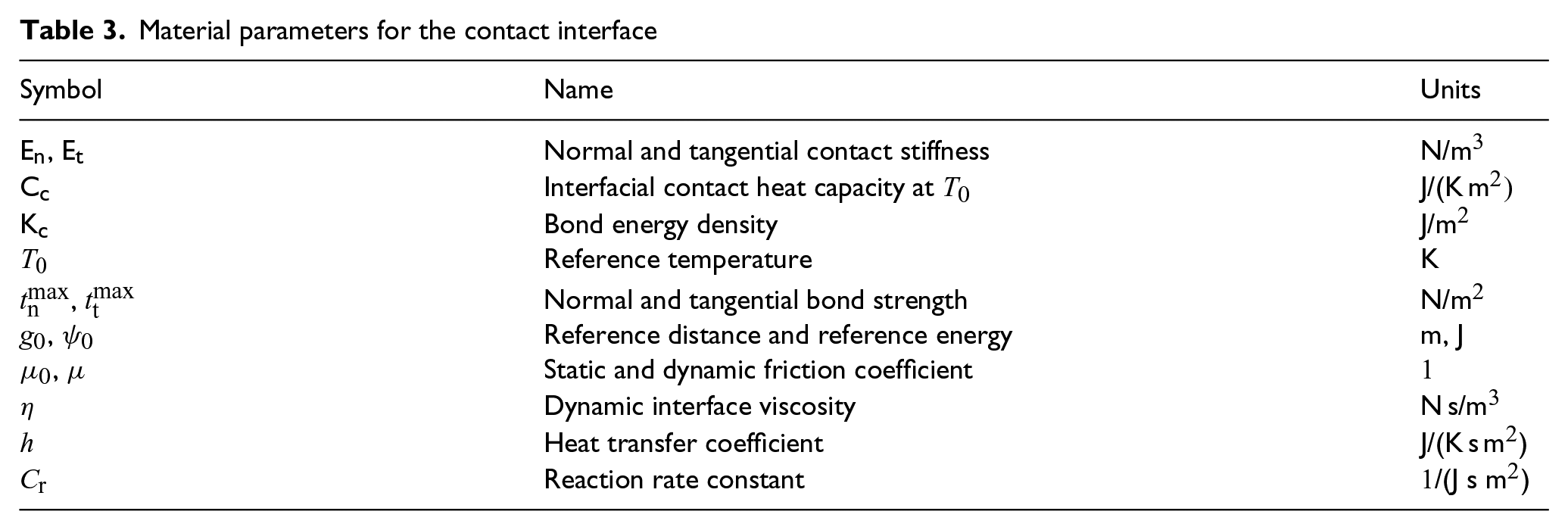
This section lists examples for the preceding constitutive equations for contact and long-range interaction accounting for the coupling between mechanical, thermal, and chemical fields. The examples are based on the material parameters defined in Table 3. Although many of the examples are partially known, their thermo-chemo-mechanical coupling has not yet been explored in detail.
Material parameters for the contact interface
Symbol
Name
Units
,
Normal and tangential contact stiffness
N/m3
Interfacial contact heat capacity at
J/(K m2)
Bond energy density
J/m2
Reference temperature
K
,
Normal and tangential bond strength
N/m2
,
Reference distance and reference energy
m, J
,
Static and dynamic friction coefficient
Dynamic interface viscosity
N s/m3
Heat transfer coefficient
J/(K s m2)
Reaction rate constant
/(J s m2)
5.1. Contact potential
A simple example for the contact potential (per unit reference area) is the quadratic function
is the surface identity on . Here, and denote the normal and tangential contact stiffness (e.g. according to a penalty regularization), denotes the contact heat capacity (at ) and denotes the bond energy. (126) corresponds to an extension of the models of Johansson and Klarbring [2], Strömberg et al. [5] and Oancea and Laursen [4] to chemical bonding. The parameters , and are defined here per undeformed surface area. They can be constant or depend on the other contact state variables, i.e. , and . If they are constant, (95.1) and (114) yield the contact traction, entropy and chemical potential (per reference area)
If , and are not constant, further terms are generated from (95.1) and (114). An example is given in (162).
Remark 5.1. As noted in Remark 3.4, the first term in (126) is zero if the sticking constraint is enforced exactly. In that case, the elastic gap is zero, while approaches infinity. If there is no mass associated with the contact interface, its heat capacity , and hence the second term in (126), is also zero. On the other hand, non-zero can be used to capture the deformation of surface asperities during contact (see Remark 2.2), while non-zero can be used to capture the heat capacity of trapped wear debris [2].
Remark 5.2. The last part in (126) corresponds to a classical surface energy. In the unbonded state, () the free surface energy is .
Remark 5.3. Choice (126) has minimum energy at full bonding (). As , follows for . Thus, owing to (97), which leads to due to (40). Hence, according to (40) and (126), the bonding state is monotonically increasing over time. Then only mechanical debonding, illustrated by the examples in Sections 5.2 and 6.3, leads to a decrease in . Chemical debonding, on the other hand, requires a modification of (126), see the following remark.
Remark 5.4. One can change the last term of (126) into
such that the minimum energy state is at . This case implies that chemical equilibrium is a balance of bonding and debonding reactions, as in the model of [47]. An example for this is given in Section 5.7. Like , the parameter can be a function of and .
Remark 5.5. The contact traction can be decomposed into the contact pressure and tangential contact traction (such that ). From (127)–(129.1) and thus follow and , where and are the normal and tangential parts of following from (15).
Remark 5.6 The normal contact contribution in (126) and (129.1) is only active up to a debonding limit. Beyond that it becomes inactive, i.e., by setting . This is discussed in the following section.
5.2. Adhesion/debonding limit
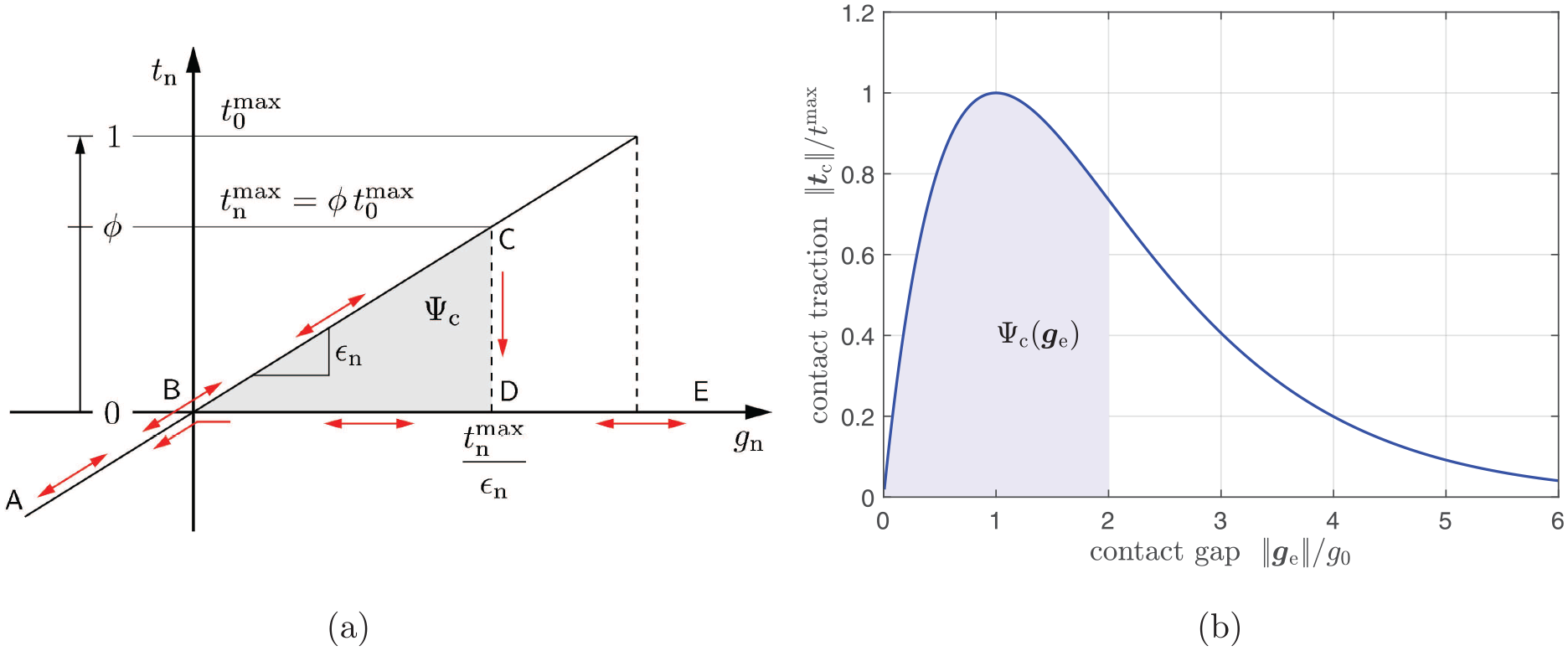
An adhesion or debonding limit implies a lower bound on the contact pressure , i.e.,
where the tensile limit (or bond strength) can depend on the contact state, i.e., . An example is
According to this, the bond strength is increasing with and decreasing with .
Once the limit is reached, sudden debonding occurs, resulting in .10 This makes debonding (mechanically) irreversible (unless ). Figure 5(a) shows a graphical representation of this.
Normal contact behavior: (a) irreversible debonding according to (129.1) and (131); (b) reversible adhesion according to (133), adapted from [86].
Debonding can also be described in the context of CZMs. An example is the exponential CZM
where and are material parameters that can depend on and . Equation (133) is an adaption of the model of Xu and Needleman [39]. It leads to the contact traction
according to the first part of (95) and Remark 4.6. Equation (134) replaces the traction law in the first part of (129) and its limit (131). It is illustrated in Figure 5(b). Traction law (134) is reversible unless is a function of that drops to zero beyond some .
Model (133) is similar to adhesion models for non-touching contact discussed next.
5.3. Non-touching adhesion
An example for non-touching contact interactions according to Section 4.4 is the interaction potential
where and are constants and where either and or and . From (121) and (122) then follows
with
These expressions are valid for general surface geometries and arbitrarily long-range interactions. For short-range interactions between locally flat surfaces, these expressions can be integrated analytically to give [31]
where is the normal gap between point and surface , and is the surface normal of at .
Remark 5.7. The surface interaction potential (135) can be derived from the classical Lennard–Jones potential for volume interactions [29, 87].
Remark 5.8. Example (135) is only valid for separated bodies (). Formulation (136) can however also be used for other potentials that admit penetrating bodies (with negative distances). Examples, such as a penalty-type contact formulation, are given in [31]. Computationally, (136) leads to the so-called two-half-pass contact algorithm, which is thus a thermodynamically consistent algorithm.
Remark 5.9. Eq. (136) also applies to the Coulomb potential for electrostatic interactions [31]. However, in order to account for the full electro-mechanical coupling, the present theory needs to be extended.
Remark 5.10. We note again that for non-touching contact, the tractions and generally only satisfy global contact equilibrium (46), but not local contact equilibrium (47).
Remark 5.11.Equation (138) is a pure normal contact model that does not produce local tangential contact forces. Tangential contact forces only arise globally when acts on rough surfaces.
5.4. Sticking limit
Similar to the debonding limit (131), a sticking limit implies a bound on the tangential traction , i.e.,
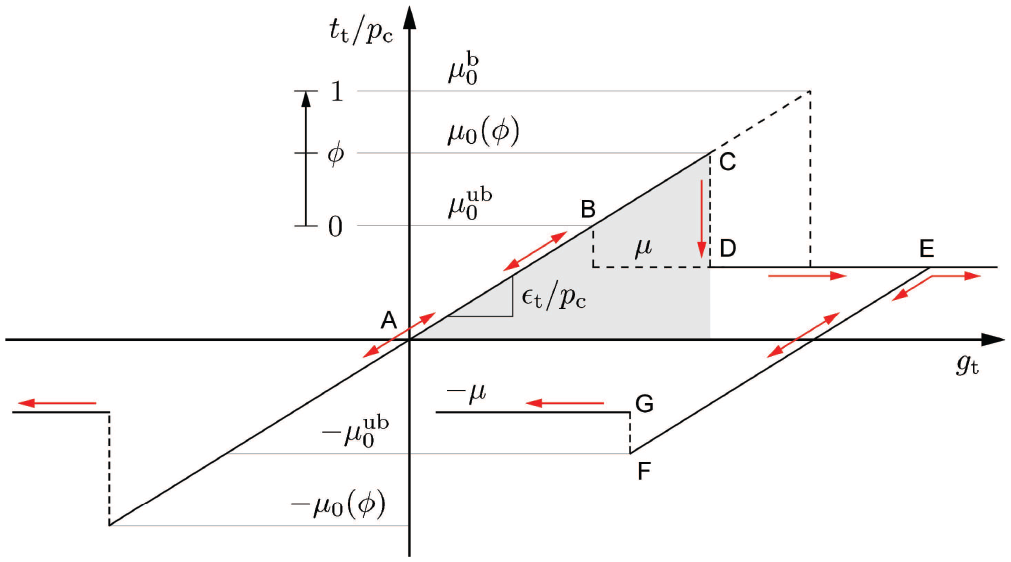
where the limit value is generally a function of contact pressure, temperature, and bonding state, i.e., . It is reasonable to assume that it is monotonically increasing with and and decreasing with , e.g.,
where
is a temperature- and bonding state-dependent coefficient of sticking friction based on the constants and describing the limits for full bonding and full unbonding, respectively. Once the limit is reached, the bonds break () and tangential sliding occurs, as is discussed in the following section. Figure 6 shows a graphical representation of this.
Tangential contact behavior: sticking, debonding, and sliding according to (139)–(141) and (143). The latter two are irreversible.
5.5. Sliding models
The simplest viscous friction model satisfying (95.2) is the tangential traction model
where is the positive-definite dynamic viscosity tensor and is the normal gap. In the isotropic case, .
One of the simplest dry friction models satisfying (95.2) for is the Amontons–Coulomb law11
where is the positive-definite coefficient tensor for sliding friction. In the isotropic case, . For adhesion, where , this extends to
In the adhesion literature this extension is often attributed to Derjaguin [88], whereas in soil mechanics it is usually referred to as Mohr–Coulomb’s law. Note that can be taken as a new constant. The application of (144) to coupled adhesion and friction in the context of nonlinear 3D elasticity has been recently considered by Mergel et al. [32, 89].
Remark 5.12. A transition model between dry (rate-independent) and viscous (rate-dependent) sliding friction is Stribeck’s curve, see, e.g., [90].
Remark 5.13. The above sliding models can be temperature dependent. An example for a temperature-dependent friction coefficient is given in [67]. Temperature-dependent viscosity models are e.g. discussed in [91] and [92].
Remark 5.14. The present formulation assumes fixed bonding sites that break during sliding friction. Sliding friction is, thus, independent from . Bonding sites can, however, also be mobile and, hence, remain intact during sliding. Sliding friction may, thus, depend on . This requires a mobility model for the bonds, e.g., following the work of [77].
Remark 5.15. The friction coefficient can be considered dependent on the surface deformation, as has been done by [93].
Remark 5.16. Friction coefficients that are dependent on the sliding velocity and (wear) state have been considered in the framework of rate and state friction models [63, 65]. Those models are usually based on an additive decomposition of the shear traction instead of an additive slip decomposition as is used here.
Remark 5.17. Note that causes the mechanical dissipation that leads to heating of the contact bodies due to (108). The mechanical dissipation is for model (142) and for model (143); see Section 6.1 for an example.
5.6. Heat transfer
The simplest heat transfer model satisfying condition (105) is the linear relationship already given in (106), where is the heat transfer coefficient, also referred to as the thermal contact conductance. Equation (106) is analogous to the mechanical flux model in (129.1). Similar to the mechanical case, implies . In general, can be a function of the contact pressure, gap, or bonding state, i.e., . Various models have been considered in the past. Those usually consider to be additively split into a contribution coming from actual contact and contributions coming from radiation and convection across a small contact gap.
During actual contact (, ) a simple model is the power law dependency on the contact pressure,
This model is a simplification of the more detailed model of Song and Yovanovich [95] that accounts for microscopic contact roughness. Another model for is the model by Mikic [96]. A new model has also been proposed recently by Martins et al. [97]. The dependency of (145) on the bonding state can, for example, be taken as
i.e., assuming that and increase monotonically with . Here , , , and are model constants.
Out of contact (, , ), the heat transfer depends on the contact gap. Considering small , Laschet et al. [94] propose an exponential decay of with was proposed according to
where
and
correspond to the heat transfer across the gap due to radiation and gas convection, respectively. Here, , , , and are constants, while and depend on the contact temperature .
We note that all the above models are consistent with the second law as long as .
5.7. Bonding reactions
The simplest reaction rate model satisfying condition (97) is the linear relationship,
where the constant can, for example, be a function of the contact temperature and pressure, i.e., . Writing , the reaction equation in (40) thus becomes . Alternatively (and in consistency with (97)), can be taken as a constant.
Another, more sophisticated example that satisfies (97) is the exponential relationship [75],
where is the universal gas constant.
Remark 5.18. Plugging the example (129.3) and (39) into (150) yields with , which is a pure forward reaction (see also Remark 5.3). Then is the forward reaction rate coefficient. An example on how this could depend on the contact gap is given in [55].
Remark 5.19. On the other hand, modification (130) leads to instead of (129.3). Substituting and then leads to
such that (150) leads to (34) with the reaction rates
for chemical bonding (forward reaction) and debonding (backward reaction), respectively. The case in Remark 5.18 is recovered for the backward reaction rate coefficient .
6. Elementary contact test cases
This section presents the analytical solution of three new elementary contact test cases: thermo-mechanical sliding, thermo-chemical bonding, and thermo-chemo-mechanical debonding. Such test cases are useful, for example, for the verification of a computational implementation. Another test case for thermo-mechanical normal contact can be found in Wriggers and Miehe [3]. All test cases consider two blocks with initial height and brought into contact. The energy and temperature change in the contacting bodies is then computed assuming instantaneous heat transfer through the bodies (), no heat source in the bulk (), no boundary heat flux apart from ( & ), equal temperature within the bodies (), quasi-static deformation (), homogeneous deformation (), uniform contact conditions (), and fixed contact area (), such that one can work with the Helmholtz free contact energy .12 Under these conditions the temperature change within each body is governed by the energy balance
that follows directly from integrating (59) over the reference volume, writing on the left-hand side and applying the divergence theorem on the right. Considering the bulk energy
where is the heat capacity per unit mass, leads to
due to (75) and (90). For quasi-static deformations then follows . Inserting this into (154) then gives
where is the heat capacity per unit contact area satisfying .
6.1. Sliding thermodynamics
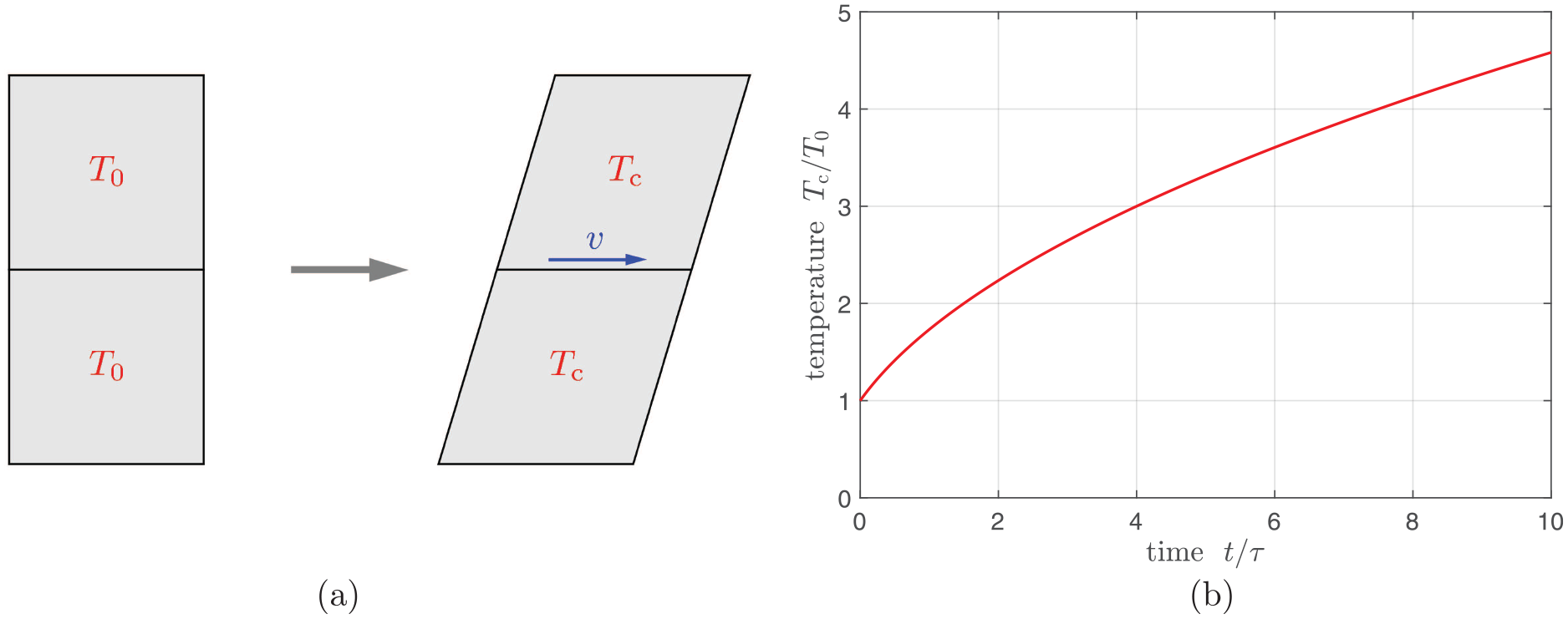
The first test case illustrates thermo-mechanical coupling by calculating the temperature rise due to mechanical sliding. The test case is illustrated in Figure 7(a): two blocks initially at mechanical rest and temperature are subjected to steady sliding with the relative sliding velocity magnitude .
Sliding thermodynamics: (a) model problem; (b) temperature rise during sliding.
Following Störmberg et al. [5] and Oancea and Laursen [4], the contact energy
is used with constant and . Equation (158) leads to the entropy given in (129.2). The mean influx, given by (108) and (113), then becomes
where , according to model (142) and according to model (143). During stationary sliding () the mechanical deformation is time-independent. From (157) thus follows
where is the time scale of the temperature rise. Integrating this from the initial condition leads to the temperature rise
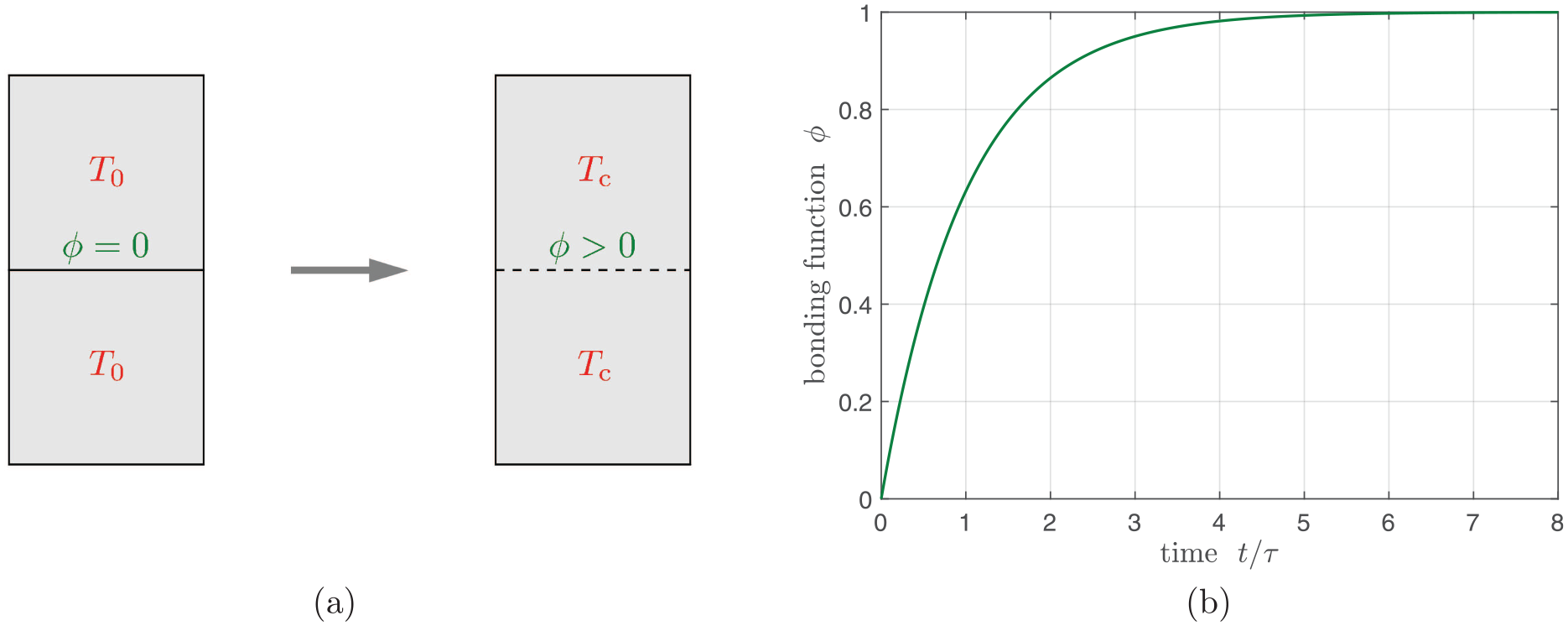
The second test case illustrates thermo-chemical coupling by calculating the temperature change due to chemical bonding. The test case is illustrated in Figure 8(a): two blocks initially unbonded and at temperature are bonding and changing temperature.
Bonding thermodynamics: (a) model problem; (b) bonding function .
Now, the contact energy
is used, which, owing to (114), leads to the chemical potential and entropy
This, in turn, leads to the internal energy
and the bonding ODE
according to (40), (78) and (150). ODE (165) can only be solved with knowledge about .
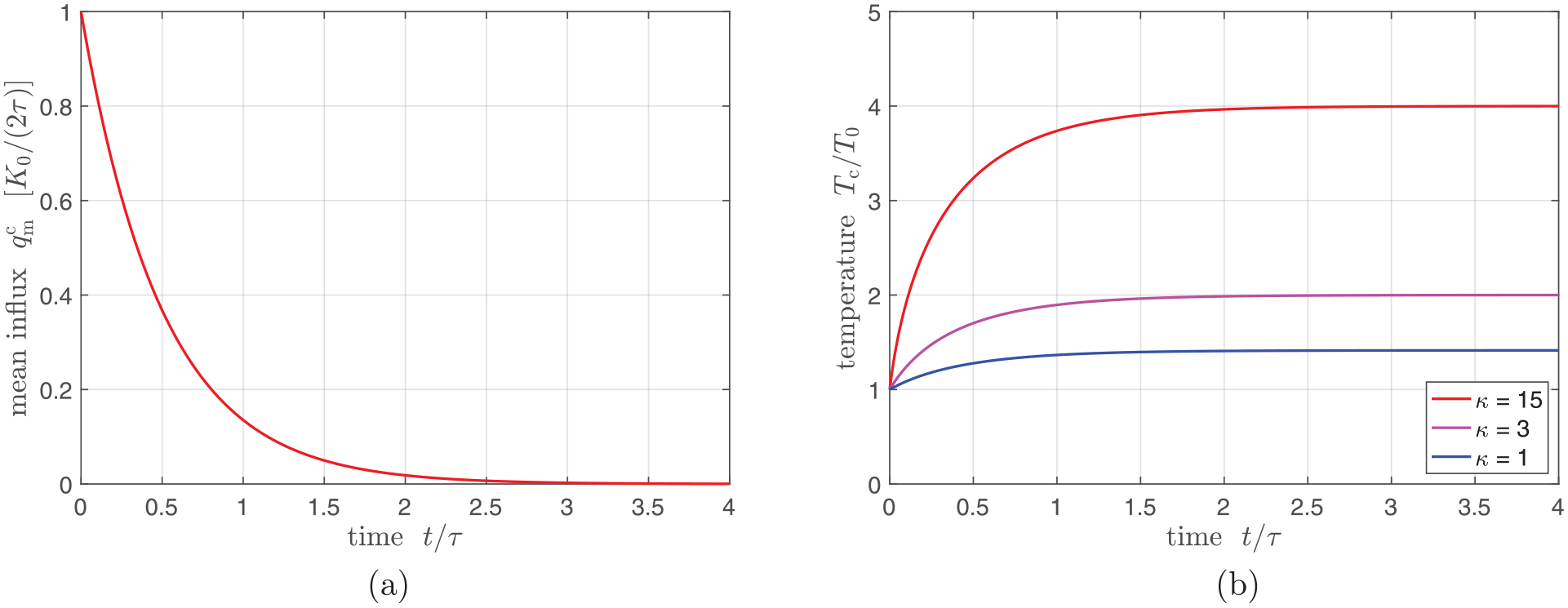
6.2.1. Exothermic bonding
Exothermic bonding occurs for (which implies ). Considering , the bonding ODE becomes independent of and can be integrated from the initial condition to give
where is the time scale of the exothermic bonding reaction. Solution (166) is shown in Figure 8(b) The mean influx, given in (108) and (113), then becomes
It satisfies the exothermic condition and is shown in Figure 9(a). From (157) thus follows
which can be integrated from the initial condition to give the temperature rise
Bonding thermodynamics: (a) heat influx and (b) temperature rise during exothermic bonding.
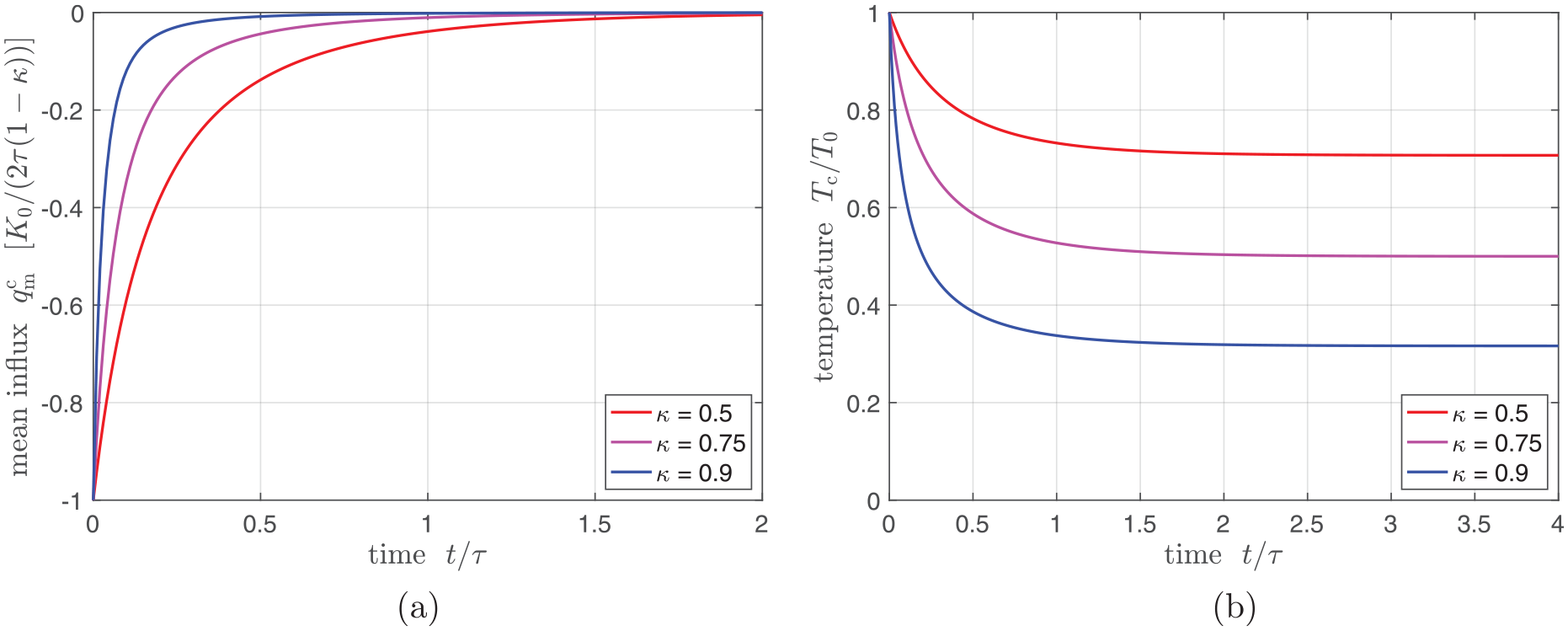
6.2.2. Endothermic bonding
Endothermic bonding occurs for in the above model (which implies according to (162) and (164)). The mean influx, given in (108) and (113), now becomes
In order to solve (165), a temperature-dependent reaction rate is considered in the form with . Thus (166) is still the solution of bonding ODE (165). The time scale now becomes . From (157) now follows
Integrating this from the initial condition gives the temperature drop
where the parameter must be smaller than unity for the temperature to remain physical. According to (170), this now leads to
and satisfies . Figure 10 shows the energy outflux and temperature drop of the contact interface for the endothermic case.
Bonding thermodynamics: (a) heat influx and (b) temperature drop during endothermic bonding.
6.3. Debonding thermodynamics
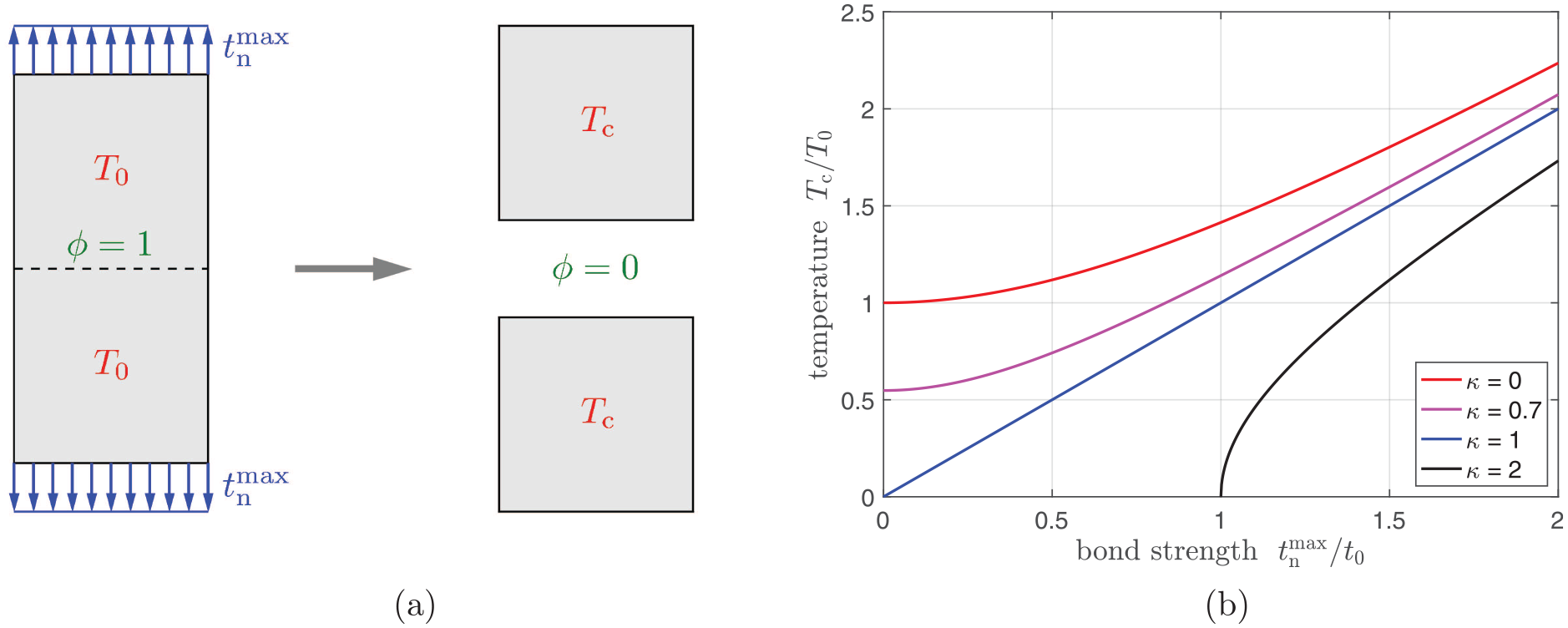
The last test case illustrates thermo-chemo-mechanical coupling by calculating the temperature change due to mechanical debonding. The test case is illustrated in Figure 11(a): two blocks initially bonded and at temperature are pulled apart leading to debonding and rising temperature. Now the contact energy density
is used. When the bond breaks, elastic strain energy is converted into surface energy and kinetic energy. The former corresponds to the stored bond energy (and is given by the second term in (174)). If viscosity is present, the latter then transforms into thermal energy. Waiting long enough, the kinetic energy completely dissipates into heat. The temperature rise can then be calculated from the energy balance. Setting the energy (per contact area) before and after debonding equal, gives
where is the mechanical energy at debonding and is the total heat capacity of the system. Considering linear elasticity gives , where is the effective stiffness of the two-body system based on height and Young’s modulus . This then leads to the temperature change
with the positive constants and . It is shown in Figure 11(b) for various values of and .
Debonding thermodynamics: (a) model problem; (b) temperature change during debonding.
Increasing the bond energy (represented by ) leads to lower final temperatures, whereas higher bond strengths lead to higher final temperatures. As a consequence, the final temperature can either be higher or lower than the initial temperature. However, note that to ensure . This implies that for large higher stresses are needed to break the bond.
7. Conclusion
This work has presented a unified continuum theory for coupled nonlinear thermo-chemo-mechanical contact as it follows from the fundamental balance laws and principles of irreversible thermodynamics. It highlights the analogies between the different physical field equations, and it discusses the coupling present in the balance laws and constitutive relations. Of particular importance is (108), the equation for the mean contact heat influx. It identifies how mechanical dissipation, chemical dissipation, and interfacial entropy changes lead to interfacial heat generation. This is illustrated by analytically solved contact test cases for steady sliding, exothermic bonding, endothermic bonding, and forced bond-breaking.
The proposed theory applies to all contact problems characterized by single-field or coupled thermal, chemical, and mechanical contact. There are several applications of particular interest to the present authors that are planned to be studied in future work. One is the pressure-dependent curing thermodynamics of adhesives [98]. A second is the study of the bonding thermodynamics of insect and lizard adhesion based on the viscolelastic multiscale adhesion model of Sauer [99]. A third is the local modeling and study of bond strength and failure of osseointegrated implants [100]. There are also interesting applications that require an extension of the present theory. An example is electro-chemo-mechanical contact interactions in batteries. Therefore, the extension to electrical contact is required, e.g., following the framework of Weißenfels and Wriggers [101]. Another example is contact and adhesion of droplets and cells. Therefore, the extension to surface stresses, surface mobility of bonding sites, contact angles, and appropriate bond reactions is needed, e.g., following the framework of Sauer [102] and Sahu et al. [75].
Footnotes
Appendix: List of main field variables and their sets
identity tensor in
, ; covariant tangent vectors at surface point ; units: [1] or [m]
contravariant tangent vectors at ; ; units: [1] or [m−1] depending on
and ; tangent vectors at
prescribed, mass-specific body force at ; units: [N/kg]
set of points contained in body
set of points on the surface of body
; boundary of body where heat flux is prescribed
; boundary of body where traction is prescribed
rate of deformation tensor at ; units: [s−1]
inelastic part of
area element on the current surface ; units: [m2]
volume element in the current body ; units: [m3]
Green–Lagrange strain tensor at ; unit-free
elastic part of
inelastic part of
total energy of the two-body system; units: [J]
bond-specific contact enthalpy on surface (per bonding site); units: [J]
non-dimensional bonding state at
mass-specific Helmholtz free bulk energy at ; units: [J/kg]
; Helmholtz free bulk energy density per undeformed volume of ; units: [J/m3]
Helmholtz free interaction energy between and ; units: [J]
bond-specific Helmholtz free contact energy on surface (per bonding site); units: [J]
; Helmholtz free contact energy density per undeformed area; units: [J/m2]
deformation gradient at ; unit-free
; gap vector between surface points and ; units: [m]
; normal gap
; tangential gap vector
; Lie derivative of at ; units: [m/s]
reversible (elastic) part of associated with sticking contact
irreversible (inelastic) part of associated with sliding contact
mass-specific external bulk entropy production rate at ; units: [J/(kg K s)]
mass-specific internal bulk entropy production rate at ; units: [J/(kg K s)]
area-specific internal contact entropy production rate at ; units: [J/(K m2 s)]
heat transfer coefficient between body and body ; units: [J/(K m2 s)]
heat transfer coefficient between body and an interfacial medium; units: [J/(K m2 s)]
change of volume at ; unit-free
change of area at ; unit-free
reference value for the area change; either or
; body index
kinetic energy of the two-body system; units: [J]
chemical contact potential per bonding site at ; units: [J]
; chemical contact potential per current area at ; units: [J/m2]
; chemical contact potential per reference area at ; units: [J/m2]
current density of bonding sites at and time ; units: [m−2]
; initial density of bonding sites at ; units: [m−2]
reference value for the current bonding site density; either or
; reference value for the initial bonding site density; either or
current density of bonded bonding sites at and time ; units: [m−2]
current density of unbonded bonding sites at and time ; units: [m−2]
in case
outward unit normal vector at
; outward unit normal vector at
subset of or
contact pressure, i.e., normal part of ; units: [N/m2]
heat influx per current area; units: [J/(m2 s)]
heat flux vector per current area; units: [J/(m2 s)]
prescribed heat influx per current area at ; units: [J/(m2 s)]
contact heat influx per current area at ; units: [J/(m2 s)]
; mean contact heat influx into and
; transfer heat flux from body to body
entropy influx per current area; units: [J/(K m2 s)]
entropy flux vector per current area; units: [J/(K m2 s)]
prescribed entropy influx per current area at ; units: [J/(K m2 s)]
contact entropy influx per current area at ; units: [J/(K m2 s)]
current mass density at and time ; units: [kg/m3]
; initial mass density at ; units: [kg/m3]
prescribed, mass-specific heat source at ; units: [J/(kg s)]
bonding reaction rate per current area; unit: [m−2 s−1]
Cauchy stress tensor at ; units: [N/m2]
second Piola–Kirchhoff stress tensor at ; units: [N/m2]
mass-specific bulk entropy at ; units: [J/(kg K)]
; bulk entropy density per undeformed volume of ; units: [J/(K m3)]
; internal contact entropy density per undeformed area; units: [J/(K m2)]
total entropy of the two-body system; units: [J/K]
; set of points defining the contact surface of body ; “master”, “slave”
set of points defining the shared contact surface; in case
time; units: [s]
surface traction per current area at ; units: [N/m2]
prescribed surface traction per current area at ; units: [N/m2]
prescribed surface traction per reference area at ; units: [N/m2]
contact traction per current area at ; units: [N/m2]
; contact traction per reference area at ; units: [N/m2]
in case ; contact traction on the master surface
; either if or if
tangential contact traction, i.e., tangential part of
temperature at ; units: [K]
temperature of the interfacial contact medium at ; units: [K]
; temperature jump [or temperature gap] across the contact interface
mass-specific internal bulk energy at ; units: [J/kg]
; internal bulk energy density per undeformed volume of ; units: [J/m3]
internal interaction energy between and ; units: [J]
bond-specific internal energy of the contact interface (per bonding site); units: [J]
; internal contact energy density per undeformed area; units: [J/m2]
total internal energy of the two-body system; units: [J]
internal energy of the contact interface ; units: [J]
material velocity at ; units: [m/s]
; velocity jump across the contact interface
in case at the common contact point
; curvilinear coordinates determining points on a surface; units: [m] or [1]
; local surface coordinates defining the closest projection point
reversible (elastic) part of associated with sticking contact
irreversible (inelastic) part of associated with sliding contact
current position of a material point at time in body ; units: [m]
initial position of a material point in body ; units: [m]
current position of a material point at time on contact surface ; units: [m]
; closest projection point of the projection
Acknowledgements
The authors are grateful to the ACalNet for supporting a visit of RAS to Berkeley in 2018, and they thank Katharina Immel and Nele Lendt for their comments on the manuscript.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the German Research Foundation (project references SA1822/8-1 and GSC 111).
ORCID iD
Roger Sauer
Notes
References
1.
ZavariseGWriggersPSteinE, et al. A numerical model for thermomechanical contact based on microscopic interface laws. Mech Res Comm1992; 19: 173–182.
2.
JohanssonLKlarbringA.Thermoelastic frictional contact problems: Modelling, finite element approximation and numerical realization. Comput Methods Appl Mech Eng1993; 105: 181–210.
3.
WriggersPMieheC.Contact constraints within coupled thermomechanical analysis - A finite element model. Comput Methods Appl Mech Eng1994; 113: 301–319.
4.
OanceaVGLaursenTA.A finite element formulation of thermomechanical rate-dependent frictional sliding. Int J Numer Meth Engng1997; 40(23): 4275–4311.
5.
StrömbergNJohanssonLKlarbringA.Derivation and analysis of a generalized standard model for contact, friction and wear. Int J Solids Struct1996; 33(13): 1817–1836.
6.
StupkiewiczSMrózZ.A model of third body abrasive friction and wear in hot metal forming. Wear1999; 231(1): 124–138.
7.
MolinariJOrtizMRadovitzkyR, et al. Finite-element modeling of dry sliding wear in metals. Eng Comput2001; 18: 592–610.
8.
WillnerK.Thermomechanical coupling in contact problems. In: BrebbiaCGaulL (eds.) Computational Methods in Contact Mechanics IV. Southampton: WIT Press, 1999, pp. 89–98.
9.
TemizerIWriggersP.Thermal contact conductance characterization via computational contact homogenization: A finite deformation theory framework. Int J Numer Meth Engrg2010; 83(1): 27–58.
10.
TemizerI.Multiscale thermomechanical contact: Computational homogenization with isogeometric analysis. Int J Numer Meth Engrg2014; 97(8): 582–607.
11.
TemizerI.Sliding friction across the scales: Thermomechanical interactions and dissipation partitioning. J Mech Phys Solids2016; 89: 126–148.
12.
DittmannMKrügerMSchmidtF, et al. Variational modeling of thermomechanical fracture and anisotropic frictional mortar contact problems with adhesion. Comput Mech2019; 63(3): 571–591.
13.
AgeletdeSaracibarC.Numerical analysis of coupled thermomechanical frictional contact problems. Computational model and applications. Arch Comput Methods Eng1998; 5(3): 243–301.
14.
LaursenTA.On the development of thermodynamically consistent algorithms for thermomechanical frictional contact. Comput Methods Appl Mech Eng1999; 177(3): 273–287.
15.
StrömbergN.Finite element treatment of two-dimensional thermoelastic wear problems. Comput Methods Appl Mech Eng1999; 177(3): 441–455.
16.
PantusoDBatheKJBouzinovPA.A finite element procedure for the analysis of thermo-mechanical solids in contact. Comput Struct2000; 75(6): 551–573.
17.
AdamLPonthotJP.Numerical simulation of viscoplastic and frictional heating during finite deformation of metal. Part I: Theory. J Eng Mech2002; 128(11): 1215–1221.
18.
XingHMakinouchiA.Three dimensional finite element modeling of thermomechanical frictional contact between finite deformation bodies using R-minimum strategy. Comput Methods Appl Mech Eng2002; 191(37-38): 4193–4214.
19.
BergmanGOldenburgM.A finite element model for thermomechanical analysis of sheet metal forming. Int J Numer Meth Engrg2004; 59(9): 1167–1186.
20.
RiegerAWriggersP.Adaptive methods for thermomechanical coupled contact problems. Int J Numer Meth Engrg2004; 59: 871–894.
DerjaguinBVMullerVMToporovYP.Effect of contact deformation on the adhesion of particles. J Colloid Interface Sci1975; 53(2): 314–326.
26.
ArgentoCJagotaACarterWC.Surface formulation for molecular interactions of macroscopic bodies. J Mech Phys Solids1997; 45(7): 1161–1183.
27.
SauerRA.An atomic interaction based continuum model for computational multiscale contact mechanics. PhD Thesis, University of California, Berkeley, CA, 2006.
28.
SauerRALiS.An atomic interaction-based continuum model for adhesive contact mechanics. Finite Elem Anal Des2007; 43(5): 384–396.
29.
SauerRALiS.A contact mechanics model for quasi-continua. Int J Numer Meth Engrg2007; 71(8): 931–962.
30.
ZengXLiS.Multiscale modeling and simulation of soft adhesion and contact of stem cells. J Mech Behav Biomed Mater2011; 4(2): 180–189.
31.
SauerRADe LorenzisL.A computational contact formulation based on surface potentials. Comput Methods Appl Mech Eng2013; 253: 369–395.
32.
MergelJCSahliRScheibertJ, et al. Continuum contact models for coupled adhesion and friction. J Adhesion2019; 95(12): 1101–1133.
33.
FrémondM. Contact with adhesion. In: MoreauJJPanagiotopoulosPD (eds.) Nonsmooth Mechanics and Applications. Berlin: Springer, pp. 177–221.
34.
RaousMCangémiLCocuM.A consistent model coupling adhesion, friction, and unilateral contact. Comput Methods Appl Mech Eng1999; 177: 383–399.
BonettiEBonfantiGRossiR.Thermal effects in adhesive contact: Modelling and analysis. Nonlinearity2009; 22: 2697–2731.
37.
WriggersPReineltJ.Multi-scale approach for frictional contact of elastomers on rough rigid surfaces. Comput Methods Appl Mech Eng2009; 198(21–26): 1996–2008.
38.
Del PieroGRaousM. A unified model for adhesive interfaces with damage, viscosity, and friction. Eur J Mech A-Solid2010; 29: 496–507.
39.
XuXPNeedlemanA.Void nucleation by inclusion debonding in a crystal matrix. Model Simul Mater Sci Engng1993; 1(2): 111–132.
40.
HattiangadiASiegmundT.A thermomechanical cohesive zone model for bridged delamination cracks. J Mech Phys Solids2004; 52: 533–566.
41.
WillamKRheeIShingB.Interface damage model for thermomechanical degradation of heterogeneous materials. Comput Methods Appl Mech Eng2004; 193: 3327–3350.
42.
FagerströmMLarssonR.A thermo-mechanical cohesive zone formulation for ductile fracture. J Mech Phys Solids2008; 56(10): 3037–3058.
43.
ÖzdemirIBrekelmansWAMGeersMGD. A thermo-mechanical cohesive zone model. Comput Mech2010; 46(5): 735–745.
44.
FleischhauerRBehnkeRKaliskeM.A thermomechanical interface element formulation for finite deformations. Comput Mech2013; 52(5): 1039–1058.
45.
EsmaeiliAJaviliASteinmannP.A thermo-mechanical cohesive zone model accounting for mechanically energetic Kapitza interfaces. Int J Solids Struct2016; 92–93: 29–44.
46.
BustoSDBetegónCMartnez-PañedaE.A cohesive zone framework for environmentally assisted fatigue. Engng Frac Mech2017; 185: 210–226.
47.
BellGI.Models for the specific adhesion of cells to cells. Science1978; 200: 618–627.
48.
BellGIDemboMBongrandP.Cell adhesion – Competition between nonspecific repulsion and specific bonding. Biophys J1984; 45: 1051–1064.
49.
HammerDALauffenburgerDA.A dynamical model for receptor-mediated cell adhesion to surfaces. Biophys J1987; 52: 475–487.
50.
DemboMTorneyDCSaxmanK, et al. The reaction-limited kinetics of membrane-to-surface adhesion and detachment. Proc R Soc B1988; 234: 55–83.
51.
DecuzziPFerrariM.The role of specific and non-specific interactions in receptor-mediated endocytosis of nanoparticles. Biomat2007; 28: 2915–2922.
52.
DeshpandeVSMrksichMMcMeekingRM, et al. A bio-mechanical model for the coupling of cell contractility with focal adhesion formation. J Mech Phys Solids2008; 56: 1484–1510.
53.
ZhangCYZhangYW.Computational analysis of adhesion force in the indentation of cells using atomic force microscopy. Phys Rev E2008; 77: 021912.
54.
SarvestaniASJabbariE.Modeling cell adhesion to a substrate with gradient in ligand density. AIChE J2009; 55(11): 2966–2972.
55.
SunLChengQHGaoHJ, et al. Computational modeling for cell spreading on a substrate mediated by specific interactions, long-range recruiting interactions, and diffusion of binders. Phys Rev E2009; 79: 061907.
56.
OlberdingJEThoulessMDArrudaEM, et al. The non-eq177 thermodynamics and kinetics of focal adhesion dynamics. PLoS ONE2010; 5(8): e12043.
57.
HuangJPengXXiongC, et al. Influence of substrate stiffness on cell-substrate interfacial adhesion and spreading: A mechano-chemical coupling model. J Colloid Interface Sci2011; 355: 503–508.
58.
SrinivasanMWalcottS.Binding site models of friction due to the formation and rupture of bonds: State-function formalism, force-velocity relations, response to slip velocity transients, and slip stability. Phys Rev E2009; 80: 046124.
59.
EvansEA. Detailed mechanics of membrane-membrane adhesion and separation: I. Continuum of molecular cross-bridges. Biophys J1985; 48: 175–183.
60.
AnderssonJLarssonRAlmqvistA, et al. Semi-deterministic chemo-mechanical model of boundary lubrication. Faraday Discuss2012; 156: 343–360.
61.
GhanbarzadehAWilsonMMorinaA, et al. Development of a new mechano-chemical model in boundary lubrication. Trib Int2016; 93: 573–582.
62.
KochharGSHeverly-CoulsonGSMoseyNJ. Theoretical approaches for understanding the interplay between stress and chemical reactivity. In: BoulatovR (ed.) Polymer Mechanochemistry. Cham: Springer, 2015, pp. 37–96.
63.
DieterichJH.Time-dependent friction and the mechanics of stick-slip. Pure Appl Geophys1978; 116: 790–806.
64.
RiceJRRuinaAL.Stability of steady frictional slipping. J Appl Mech1983; 50: 343–349.
65.
RuinaA.Slip instability and state variable friction laws. J Geophys Res1983; 88: 10359–10370.
66.
HolzapfelGA.Nonlinear Solid Mechanics: A Continuum Approach for Engineering. Hoboken, NJ: John Wiley & Sons, Inc., 2000.
67.
LaursenTA.Computational Contact and Impact Mechanics: Fundamentals of modeling interfacial phenomena in nonlinear finite element analysis. Berlin: Springer, 2002.
68.
SauerRAGhaffariRGuptaA.The multiplicative deformation split for shells with application to growth, chemical swelling, thermoelasticity, viscoelasticity and elastoplasticity. Int J Solids Struct2019; 174–175: 53–68.
69.
HallquistJOGoudreauGLBensonDJ.Sliding interfaces with contact-impact in large-scale Lagrangian computations. Comput Methods Appl Mech Eng1985; 51: 107–137.
70.
WriggersPHaraldssonA.A simple formulation for two-dimensional contact problems using a moving friction cone. Commun Numer Meth Engng2003; 19: 285–295.
71.
DuongTXSauerRA.A concise frictional contact formulation based on surface potentials and isogeometric discretization. Comput Mech2019; 64(4): 951–970.
Brochard-WyartFde GennesPG.Adhesion induced by mobile binders: Dynamics. Proc Natl Acad Sci USA2002; 99(12): 7854–7859.
77.
FreundLBLinY.The role of binder mobility in spontaneous adhesive contact and implications for cell adhesion. J Mech Phys Solids2004; 52(11): 2455–2472.
78.
ChadwickP.Continuum Mechanics: Concise Theory and Problems. Mineola, NY: Dover, 1976.
79.
RosakisPRosakisAJRavichandranG, et al. A thermodynamic internal variable model for the partition of plastic work into heat and stored energy in metals. J Mech Phys Solids2000; 48: 581–607.
OnsagerL.Reciprocal relations in irreversible processes I. Phys Rev1931; 37: 405–426.
82.
OnsagerL.Reciprocal relations in irreversible processes II. Phys Rev1931; 38: 2265–2279.
83.
de GrootSRMazurP.Non-equilibrium Thermodynamics. Mineola, NY: Dover, 1984.
84.
ColemanBDNollW.The thermodynamics of elastic materials with heat conduction and viscosity. Arch Ration Mech Anal1964; 13: 167–178.
85.
LaidlerK.A glossary of terms used in chemical kinetics, including reaction dynamics. Pure Appl Chem1996; 68(1): 149–192.
86.
SauerRA.A survey of computational models for adhesion. J Adhesion2016; 92(2): 81–120.
87.
SauerRAWriggersP.Formulation and analysis of a 3D finite element implementation for adhesive contact at the nanoscale. Comput Methods Appl Mech Eng2009; 198: 3871–3883.
88.
DerjaguinBV.Molekulartheorie der äußeren Reibung. Z Phys1934; 88: 661–675.
89.
MergelJCScheibertJSauerRA.Contact with couped adhesion and friction: Computational framework, applications and new insights. J Mech Phys Solids2021; 146: 104194.
90.
GelinckERMSchipperDJ.Calculation of Stribeck curves for line contacts. Tribol Int2000; 33(3): 175–181.
91.
RoelandsCJR.Correlational aspects of the viscosity–temperature–pressure relationship of lubricating oils. PhD Thesis, Technical University of Delft, Netherlands, 1966.
92.
SeetonCJ.Viscosity-temperature correlation for liquids. Tribol Lett2006; 22(1): 67–78.
93.
StupkiewiczS.Extension of the node-to-segment contact element for surface-expansion-dependent contact laws. Int J Numer Methods Eng2001; 50(3): 739–759.
94.
LaschetGJakumeitJBenkeS.Thermo-mechanical analysis of cast/mould interaction in casting processes. Z Metallkd2004; 95: 1087–1096.
95.
SongSYovanovichM.Relative contact pressure - Dependence on surface roughness and Vickers microhardness. J Thermophysics1988; 2(1): 43–47.
96.
MikićBB.Thermal contact conductance; Theoretical considerations. Int J Heat Mass Transfer1974; 17: 205–214.
97.
MartinsJMPNetoDMAlvesJL, et al. Numerical modeling of the thermal contact in metal forming processes. Int J Adv Manuf Technol2016; 87(5): 1797–1811.
98.
SainTLoeffelKChesterS.A thermo-chemo-mechanically coupled constitutive model for curing glassy polymers. J Mech Phys Solids2018; 116: 267–289.
99.
SauerRA.A computational model for nanoscale adhesion between deformable solids and its application to gecko adhesion. J Adhes Sci Technol2010; 24: 1807–1818.
100.
ImmelKDuongTXNguyenVH, et al. A modified Coulomb’s law for the tangential debonding of osseointegrated implants. Biomech Model Mechanobiol2020; 19: 1091–1108.
101.
WeißenfelsCWriggersP.Numerical modeling of electrical contacts. Comput Mech2010; 46(2): 301–314.
102.
SauerRA.A contact theory for surface tension driven systems. Math Mech Solids2016; 21(3): 305–325.