
Abstract
In this paper, the transient computational homogenization scheme is extended to allow for nonlinear elastodynamic phenomena. The framework is used to analyze wave propagation in a locally resonant metamaterial containing hyperelastic rubber-coated inclusions. The ability to properly simulate realistic nonlinearities in elasto-acoustic metamaterials constitutes a step forward in metamaterial design as, so far, the literature has focused only on academic nonlinear material models and simple lattice structures. The accuracy and efficiency of the framework are assessed by comparing the results with direct numerical simulations for transient dynamic analysis. It is found that the band gap features are adequately captured. The ability of the framework to perform accurate nonlinear transient dynamic analyses of finite-size structures is also demonstrated, along with the significant computational time savings achieved.
Keywords
1. Introduction
Metamaterials are engineered materials designed to exhibit extraordinary properties. Such materials have been attracting attention in many fields, from optics to acoustics and mechanics [1]. Metamaterials properties originate from their artificially designed microstructures, which may yield unconventional properties, such as negative Poisson’s ratio [2, 3], negative mass density [4], negative refractive index [5–7], negative bulk modulus [8], among others. This results in a broad range of potential applications, most of them involving wave manipulation or attenuation, as used in, e.g., filtering devices devices [9], superlenses [10, 11], shielding structures [12], and cloaking devices [13, 14]. In this paper, the focus is on metamaterials designed to manipulate elasto-acoustic wave propagation.
The most striking feature of such metamaterials is the emergence of band gaps, i.e. frequency bands in which waves cannot propagate or are strongly attenuated. The local resonance phenomenon is one of the mechanisms underlying these forbidden frequency zones. The local resonance band gaps may occur in subwavelength regimes and are typically induced by a negative effective dynamic mass [15]. A convincing experimental demonstration of this phenomenon, within the framework of metamaterials, was designed by Liu et al. [4]. Their design consisted of heavy rubber-coated lead spherical inclusions stacked in a simple cubic lattice embedded in an epoxy matrix. The soft rubber ensures that the heavy core can move independently of the matrix material, acting as a local resonator through the matrix material, waves propagate and may interact with the inclusions. Close to the local resonance frequency, the strong interaction between the matrix and the inclusions and the periodic arrangement of inclusions give rise to wave reflection and attenuation, i.e. triggering the so-called local resonance band gap.
The subwavelength feature of locally resonant elasto-acoustic metamaterials makes them suitable for homogenization. Homogenization theories are powerful tools for the computation of effective properties of composites by averaging their micro-scale behavior [16–18]. In problems where the underlying microstructure should be modeled in detail, computational homogenization [19] can be used. In general, the key feature of computational homogenization schemes is their generality and accuracy compared with other homogenization schemes, while still being efficient compared with direct numerical simulations (i.e. the numerical solution, in space and time, for the dynamics of the full system, including all degrees of freedom in the system, without performing any homogenization or model reduction). Both analytical and computational homogenization frameworks have been recently extended to account for complex transient interactions and micro-inertia effects. However, most proposed frameworks are based on frequency-domain formulations [20–22], which are only convenient for linear elastic materials and for the straightforward computation of band diagrams in periodic materials, and thus band gap identification. For more general cases, involving material nonlinearity and aperiodic time-dependent boundary conditions, it is often necessary to solve the multi-scale problem directly in space and time. A step forward in this direction was made by Pham et al. [23], who extended the classical computational homogenization scheme [19, 24], also called FE2, in specific situations, to incorporate microdynamics. Both macro- and micro-scales are governed by the full balance of linear momentum; solving the multi-scale problem results in solving an initial boundary value problem at both scales [23, 25]. Although the new micro–macro kinematics and dual relations for the effective stress tensor and momentum have been derived in a general sense, their numerical implementation has still been restricted to the special case of a linear elasto-acoustic locally resonant metamaterial. More recently, Sridhar et al. [26] have extended that work by using a static–dynamic superposition under the linearity assumption, leading to an enriched reduced-order model, thus enhancing the performance of the framework in incorporating linear microdynamics in the subwavelength regime of elastic metamaterials.
Recently, the role of nonlinearity on the metamaterial response has raised attention as it would enable the design of tunable structures [1]. Nonlinearities may induce amplitude-dependent dispersion and group velocities, and also the propagation of emergent waveforms, such as solitons [27–29]. However, only a few papers in the literature have addressed the effect of nonlinearity on locally resonant metamaterials [30–32]. Furthermore, the material nonlinearity considered so far was usually restricted to academic material models, which do not correspond to any realistic nonlinear material.
This paper aims to demonstrate that the dynamic computational homogenization scheme extended from Pham et al. [23] is applicable to metamaterial microstructures involving nonlinear constituents. For this purpose, a semi-1D locally resonant metamaterial of Liu-type is considered, whereby the computational homogenization scheme is derived in a general sense. The coating layer, responsible for the interaction between the matrix material and the heavy inclusion in Liu’s material, is modeled as a neo-Hookean hyperelastic material, commonly used for rubber materials. The presented implementation of the computational homogenization framework involves a finite-element description for the spatial discretization and the Newmark method for time integration. Unlike the linear implementation provided by Pham et al. [23], to incorporate material nonlinearities, the macroscopic tangents are derived and computed at each integration point. Since the approach makes use of a finite-element discretization, complex geometries can be modeled, thus providing a step forward in the analysis of nonlinear locally resonant elasto-acoustic metamaterials, which have been restricted so far to lattice systems.
This paper is organized as follows. In Section 2, the dynamic computational homogenization framework is briefly presented. In Section 3, an extended nonlinear numerical implementation of the dynamic computational homogenization framework is developed. Next, numerical simulations are carried out to compare the computational homogenization framework results with direct numerical simulations in terms of accuracy and efficiency, as presented in Section 4. Two types of numerical analysis are performed: a free wave propagation analysis and a transient structural dynamic analysis. Finally, in Section 5, conclusions are drawn.
In the following, scalars, vectors, and second-order tensors are denoted by a (or A),
2. Dynamic computational homogenization
The full-scale problem is decomposed into two scales: the macroscopic (or coarse) scale, and the microscopic (or fine) scale, which may present complex topology and nonlinear, evolving material behavior. These scales are coupled by scale transition relations, which usually involve the application of a localization operator to set the macro-to-micro kinematic relations, and the Hill–Mandel condition, which sets the micro-to-macro homogenization relation through energy consistency across the scales. The dynamic multi-scale model is set up by extending the classical first-order computational homogenization framework to the transient dynamic case. In the following, the subscript “M” refers to a macroscopic quantity, whereas the subscript “m” refers to a microscopic quantity.
2.1. Separation of scales
Consider a general heterogeneous material with n microscopic constituents. The classical computational homogenization requires the typical size of each microscopic constituent

This equation is generally known as the long-wavelength approximation. Under this assumption, the microscopic representative volume element (RVE) can be considered to behave quasistatically. Therefore, micro-inertial effects are negligible. Since a locally resonant elasto-acoustic metamaterial operating in a subwavelength regime is designed in such a way that it obeys the long-wavelength approximation, a more relaxed assumption has been proposed by Pham et al. [23]. Let

Here,
2.2. Macroscopic problem
At the macroscopic scale, in the absence of body forces, the system is governed by the momentum balance equation:

where
2.3. Microscopic problem
The locally resonant elasto-acoustic metamaterial considered in this work is a periodic structure. The choice of microscopic RVE is therefore straightforward and is identical to the unit cell (see Figure 1).
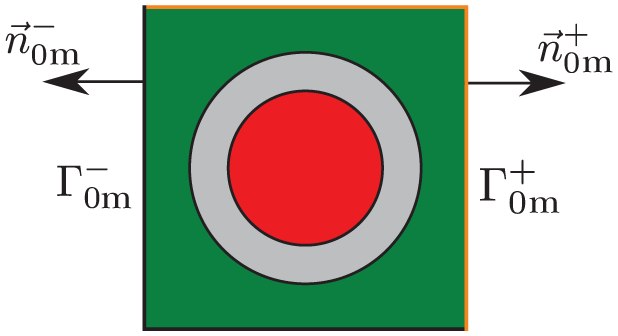
2D representative volume element used for dynamic computational homogenization.
The displacements at the microscopic scale can be related to the macroscopic kinematics (i.e., position or displacement, velocity, and acceleration fields) by means of a Taylor expansion in terms of the position vector around a micro-scale reference position vector. Restricting the approximation to the first-order derivative, the resulting kinematic relation that should hold at each time

Here,

At the microscopic scale, the constitutive behaviour of each material constituent


Note that the rate of change of the microscopic linear momentum is directly related to the acceleration
2.4. Scale transition relations
2.4.1. Macro-to-micro: kinematics
Kinematic averaging is used to establish the downscaling relation from the macroscopic deformation gradient tensor

Here,
The microscopic deformation gradient tensor

Substitution of this relation in equation (8) and application of the divergence theorem results in the following constraint equation on the microfluctuation field:

where

Note, that for transient problems, care should be taken when applying periodic boundary conditions. For the considered RVE, the locally resonant behaviour is localized in the center and fully confined in the quasistatic matrix, which is in accordance with the relaxed scale separation condition (equation (2)). Hence, the use of periodic boundary conditions is allowed for the considered locally resonant elasto-acoustic metamaterial RVE.
2.4.2. Micro-to-macro: Hill–Mandel condition
The macroscopic stress, momentum and tangent stiffness can be determined from the microscopic scale based on the Hill–Mandel condition [34]. This requires the volume average of the microscopic virtual work in the RVE to equal the virtual work per unit of volume at the macro-scale. In a transient framework, both work of deformation and work of displacement should be taken into account, leading to

By making use of the virtual variations of the downscaling relations, equations (4) and (9), and after applying the chain rule, the right hand side of equation (12) can be written as

In this equation, the last term vanishes, owing to the momentum balance at the microscopic scale (cf. equation (5)). The second term can be rewritten using Gauss’s theorem, after which, the tractions on the boundary

This condition must hold for any virtual deformation and displacement (


These upscaling relations describe the dependency of the macroscopic stress and momentum on volume-averaged microscopic quantities. From a computational efficiency point of view, it is more convenient to rewrite the volume integrals as boundary integrals. This can be done by rewriting the microscopic stress using the microscopic equilibrium equation (equation (5)), and the identity tensor

Substituting equation (17) into equation (15), and applying Gauss’s theorem gives

Similarly, by making use of equation (5) and the divergence theorem, the macroscopic momentum rate can be written as

The macroscopic stress and momentum can now be determined via integration over the RVE boundary only. The numerical implementation of this general dynamic homogenization framework is given in the next section.
3. Numerical implementation
3.1. Macroscopic system of equations
Adopting a standard finite-element discretization scheme, the macroscopic balance of momentum, equation (3), can be expressed in terms of its residual as follows:

which vanishes if the balance of forces is satisfied;



where
3.2. Microscopic system of equations
The microscopic system of equations is similar to the macroscopic one, with the important difference that the constitutive equations are known at the micro-scale, i.e. equations (6) to (7). By making use of equation (7), the microscopic inertia forces can be expressed in terms of the mass matrix

3.3. Time integration
At both microscopic and macroscopic scales, time integration is performed according to the implicit Newmark scheme considering a fixed time step


After insertion of these relations, the macroscopic and microscopic residuals (equations (20) and (24), respectively) can be expressed in terms of the displacement

3.4. Linearization
The resulting set of nonlinear equations is solved iteratively using the Newton–Raphson procedure. Hence, the macroscopic and microscopic residuals should be linearized. Following standard linearization techniques, the residual at iteration

The expressions for the iterative macroscopic and microscopic tangent matrices

with tangent stiffness matrix
At the macroscopic scale, the iterative tangent matrix

In the most general case, the iterative change of stress


where
At both the microscopic and macroscopic scales, the iterative updates on the displacements

The Newton–Raphson iterative procedure is assumed to have reached convergence when the residual
3.5. Boundary conditions
At the macroscopic scale, the boundary conditions can be applied using conventional finite-element techniques. At the microscopic scale, periodic boundary conditions, as introduced in equation (11), are applied. The application of the periodic boundary conditions is standard and has been discussed in detail in the context of the quasistatic computational homogenization, e.g. by Sridhar et al. [26]. Here, it follows the same lines, in accordance with the relaxed separation of scales.
Next, the coupling between the macroscopic kinematic quantities,

where
3.6. Initial conditions
To apply the Newmark integration algorithm, the initial displacement and velocity of all nodes should be specified. The initial acceleration of all nodes can then be determined by making use of [37]

By setting

in which p and f denote the prescribed and all the remaining “free” nodes, respectively. This relation is applied to both the macroscopic and microscopic scales. Note that at the macro-scale the mass matrix is not available in a closed form. Therefore, it is assumed that at
3.7. Macroscopic stress and momentum rate
The macroscopic stress


Here,
3.8. Macroscopic tangents
The relations describing the macroscopic tangent tensors

Note that the iterative tangent matrix

with

Equation (40) can also be rewritten in a specific vector/tensor format:

The macroscopic constitutive tangents

After substitution of the kinematic relation for the prescribed nodal displacements


The remaining macroscopic constitutive tangents,

Analogously to these derivations, the macroscopic constitutive tangents,


3.9. Numerical solution procedure
The numerical implementation of the presented dynamic computational homogenization scheme leads to the solution procedure sketched in the flowchart in Figure 2. The derivation of this framework differs from previous work [23, 26] in the introduction of the iterative macroscopic tangent matrix
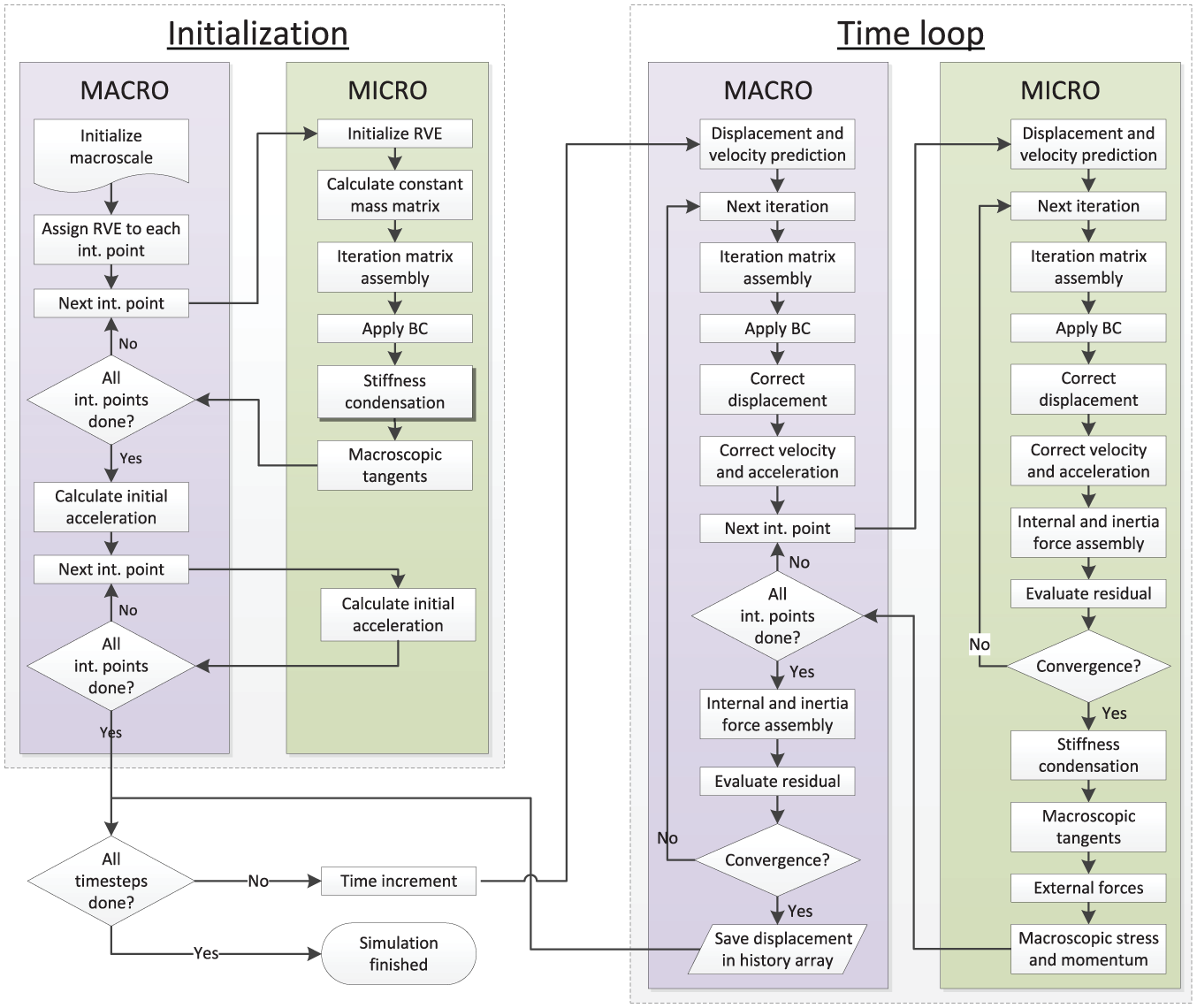
Numerical implementation of the dynamic computational homogenization model.
4. Numerical results
In this section, the dynamic computational homogenization framework is verified by comparing the results with those from direct numerical simulations.
4.1. Mechanical model system
A one-dimensional version, i.e. each node supports only one degree of freedom, being the horizontal displacement, of Liu’s locally resonant metamaterial design [4] is used to highlight the relevance of the computational homogenization framework. Although only longitudinal motions are allowed in this simplified setting, it presents both dispersion and nonlinear effects, making it sufficiently complex to assess the proposed homogenization framework.
The considered 1D unit cell (or RVE) is depicted in Figure 3(b), along with a cross-section of Liu’s unit cell (Figure 3(a)), highlighting the similarity between these models. The 1D RVE consists of two parallel parts rigidly connected at interface nodes. The lower part is composed of three material phases: an epoxy matrix (green), a silicone rubber coating (gray), and a lead core (red); the upper part consists of epoxy only. The contrast between the material properties in the lower part of the unit cell, i.e. the low stiffness of the rubber coating and the heavy mass of the lead core, ensures localized motions, which triggers local resonance effects [15]. The upper part, consisting only of the matrix material, captures the overall elastic stiffness of the locally resonant elasto-acoustic metamaterial and provides the path for wave propagation. The geometric and linear elastic material properties of the 1D RVE correspond to those considered by Sridhar et al. [26] and are given in Table 1. In addition, a small stiffness-proportional damping of the form

Unit cells of locally resonant metamaterial models: (a) cross-section of Liu’s model; (b) 1D model used for the numerical simulations, including the finite element discretization. Squares indicate nodes. Both models consist of three material phases: epoxy matrix (green), silicone rubber coating (gray), and lead core (red).
Geometric and linear elastic material properties of the studied unit cell.

4.1.1. Linear elastic material
For a linear elastic material behavior of all constituents, with the material properties given in Table 1, the dispersion diagram for the considered 1D unit cell is depicted in Figure 4, which has been obtained by assuming time-harmonic solutions and applying Bloch–Floquet conditions to the left and right boundary nodes [38]. It predicts a locally resonant band gap for frequencies
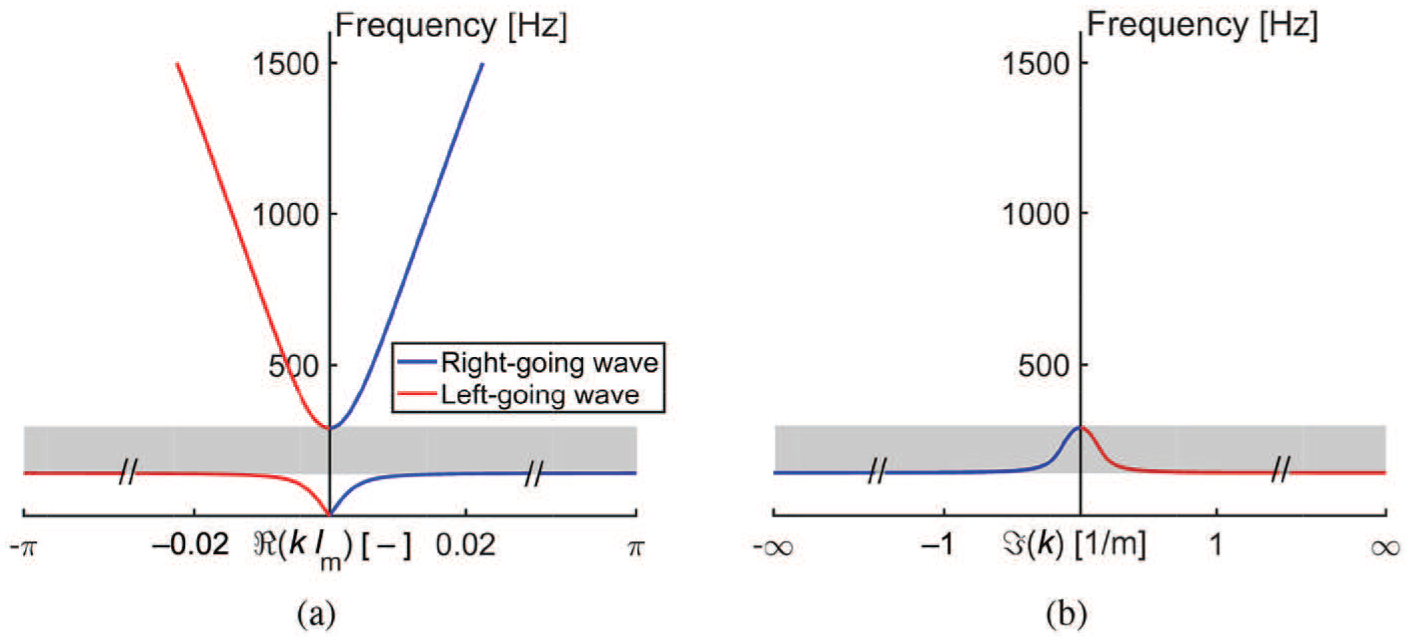
Dispersion diagram for 1D unit cell with the locally resonant band gap depicted by the gray shaded area: (a) real part of the dimensionless wavenumber
The homogenizability of this unit cell is in accordance with the relaxed separation of scales conditions, equation (2), as can be verified by comparing the local resonance frequency
4.1.2. Nonlinear material
The focus of this work is on the homogenization analysis of nonlinear locally resonant elasto-acoustic metamaterials, motivated by the fact that, for sufficiently large input excitations, especially close to the local resonance frequency, the rubber phase experiences finite strains, owing to large central mass displacements. Accordingly, the linear elastic model of the rubber must be replaced by a hyperelastic, 1D incompressible neo-Hookean constitutive model, which can be expressed as [39]

where P is the nominal (or engineering) stress,
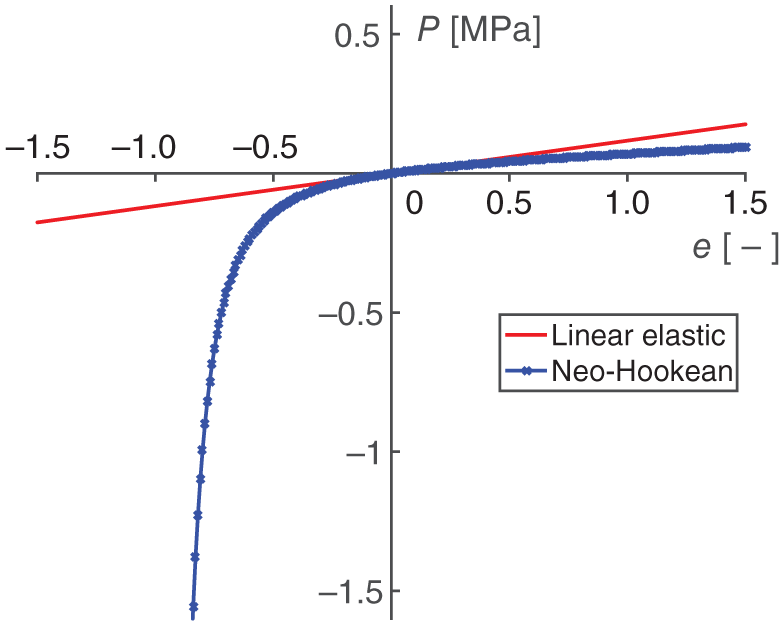
Stress–strain curve for the neo-Hookean constitutive model and the equivalent linear elastic constitutive model used to model the rubber phase.
The numerical problem to be solved consists of a structure made up of

where A is the amplitude of the prescribed harmonic displacement and
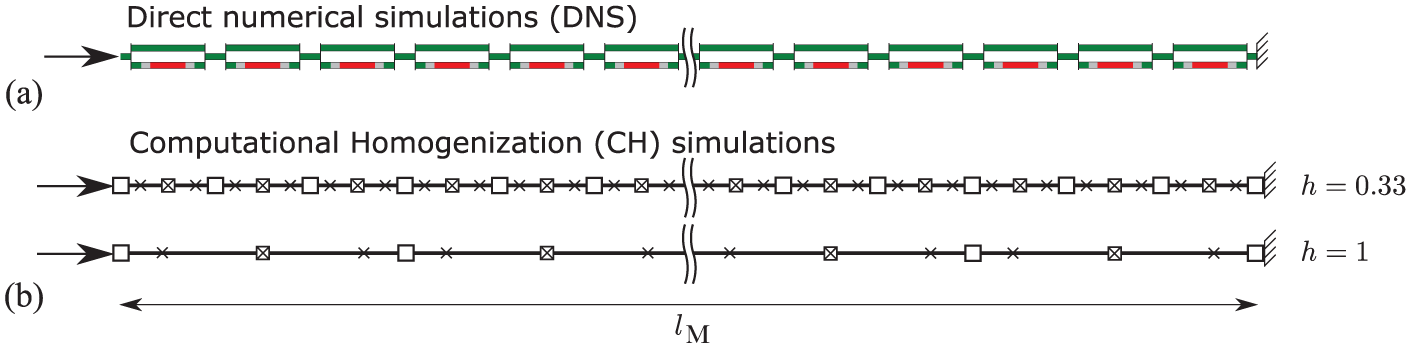
The structural problem to be solved numerically: (a) direct numerical simulation model system; (b) computational homogenization macroscopic model systems for two different homogenization levels (h), with squares indicating nodes of quadratic finite elements and crosses indicating integration points. At each integration point, a microscopic unit cell problem is solved.
To assess the potential of the nonlinear dynamic computational homogenization, two types of simulations are carried out, i.e. wave propagation and structural dynamic analyses. In the first case, the considered structure is taken to be long enough to avoid reflections at the boundaries, enabling wave propagation analysis. In the second case, a finite structure is considered and the transient behavior after successive reflections is examined.
Both computational homogenization (CH) and direct numerical simulations (DNSs) are performed. The results from DNSs are used to assess the computational homogenization framework. In the case of DNSs, the fully discretized model is solved, as depicted in Figure 6(a). The computational homogenization simulations consist of two scales, i.e. the microscopic and macroscopic scales. At the microscopic scale, the discretized unit cell shown in Figure 3(b) is used. At the macroscopic scale, the homogenized structure with the same length

Thus, as h increases, the number of integration points decreases and the macroscopic mesh discretization coarsens. As a result, a reduction in computational time is expected.
The implicit Newmark time integration scheme is employed with the same settings for the multiscale and DNSs. Relatively small time steps of
4.2. Wave propagation analysis
For the wave propagation analysis, a locally resonant metamaterial structure consisting of
The wave attenuation properties of locally resonant structures are usually analyzed using a transmission plot, i.e. a curve representing the relation between the transmissibility measured at a specific position and the excitation frequency. The transmissibility

where the root-mean-square displacement

and
In Figure 7, the transmissibility curves obtained by DNSs for the linear and nonlinear metamaterials are compared. In the linear case, the transmissibility is frequency-dependent, but invariant with amplitude. The local resonance feature of the metamaterial promotes the attenuation zone observed between 100 and 300 Hz. When nonlinear local interactions of the neo-Hookean type are incorporated, the transmissibility becomes amplitude-dependent. The responses of the nonlinear metamaterial for two excitation amplitudes,
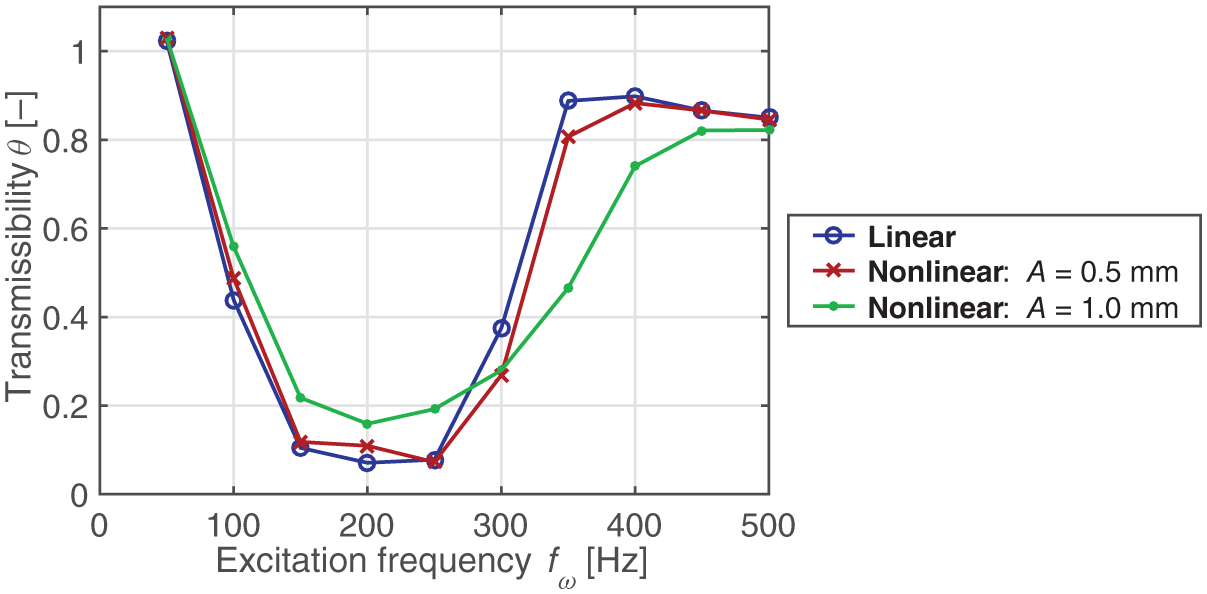
Transmissibility of the metamaterial structure based on the root-mean-square displacement at
Transmissibility curves obtained by DNSs and computational homogenization for various homogenization levels are depicted in Figure 8. For the highest amplitude of excitation considered,
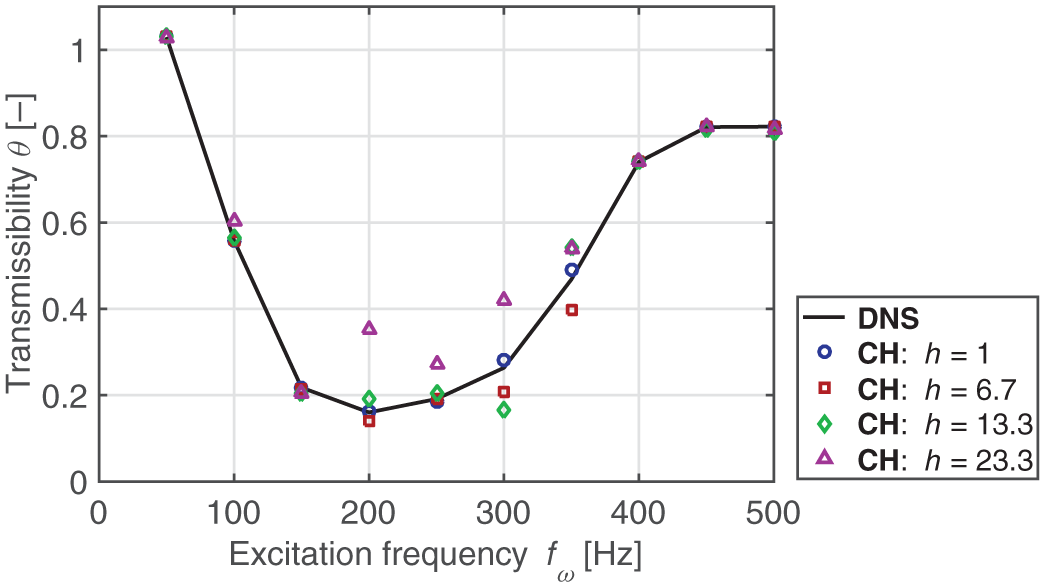
Transmissibility of the metamaterial structure based on the macro-scale root-mean-square displacements at
4.3. Transient structural dynamic analysis
In contrast with the wave propagation analysis, in practice often finite-size structures need to be analyzed where the effect of wave reflection at external boundaries and interference cannot be neglected. In this section, the applicability and efficiency of the computational homogenization framework is investigated by performing a transient analysis of a finite locally resonant elasto-acoustic metamaterial structure as defined previously, with a total length
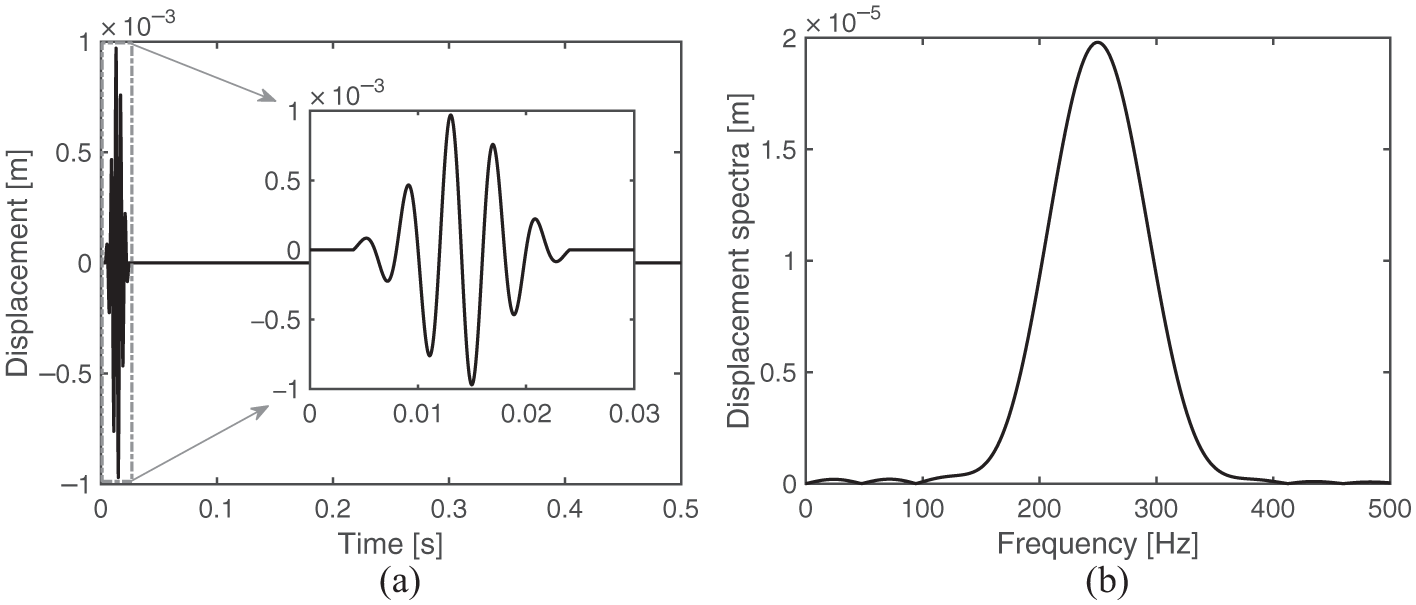
For a pulse with central frequency

with
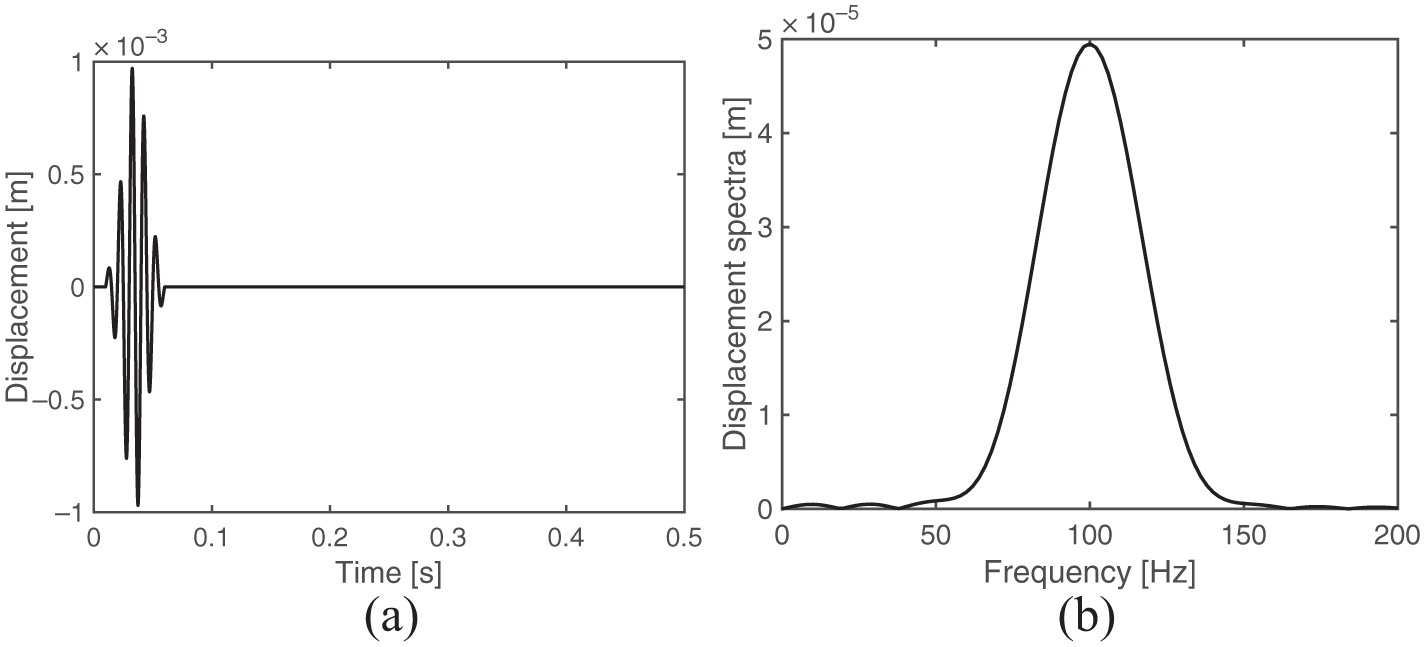
Transient input displacement signal with central frequency
Temporal displacement response of the considered nonlinear metamaterial structure with length
The dynamic response of the whole structure obtained for different homogenization levels can be compared for a particular time instance. In Figure 11(a) and (b), the dynamic responses at
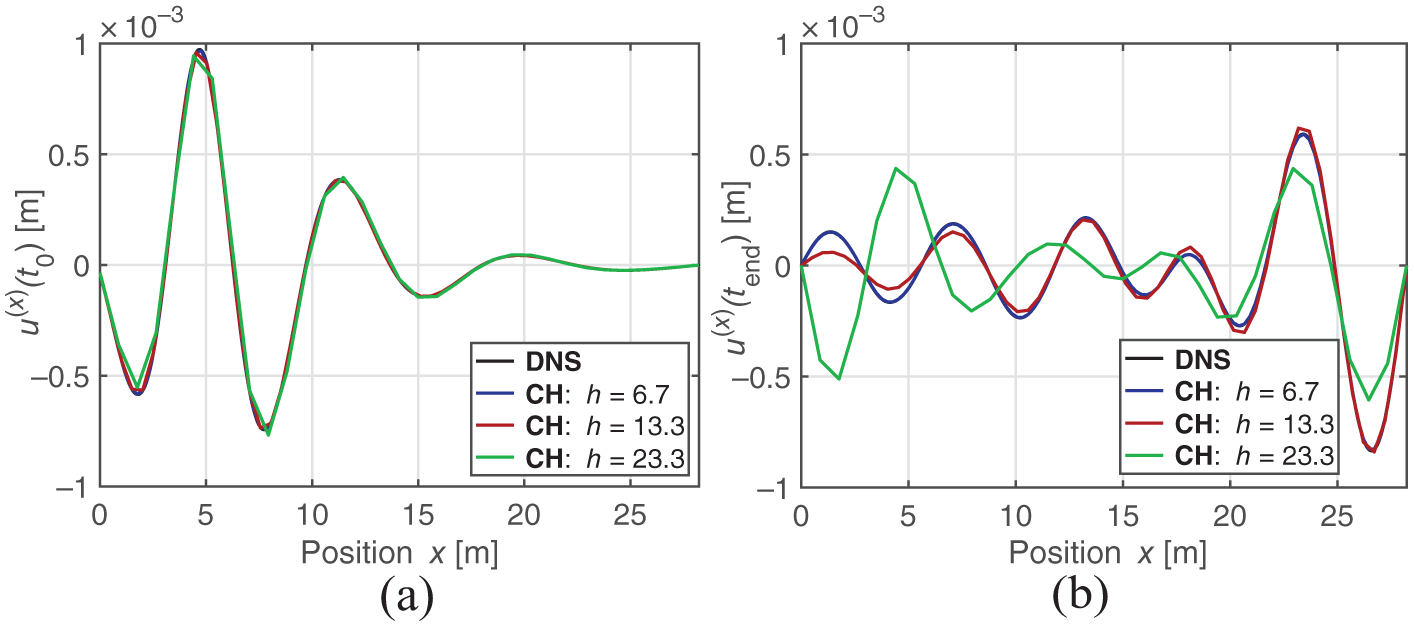
Displacement response along the considered nonlinear metamaterial structure with length
Similarly, a pulse displacement with central frequency
Transient input displacement signal with central frequency
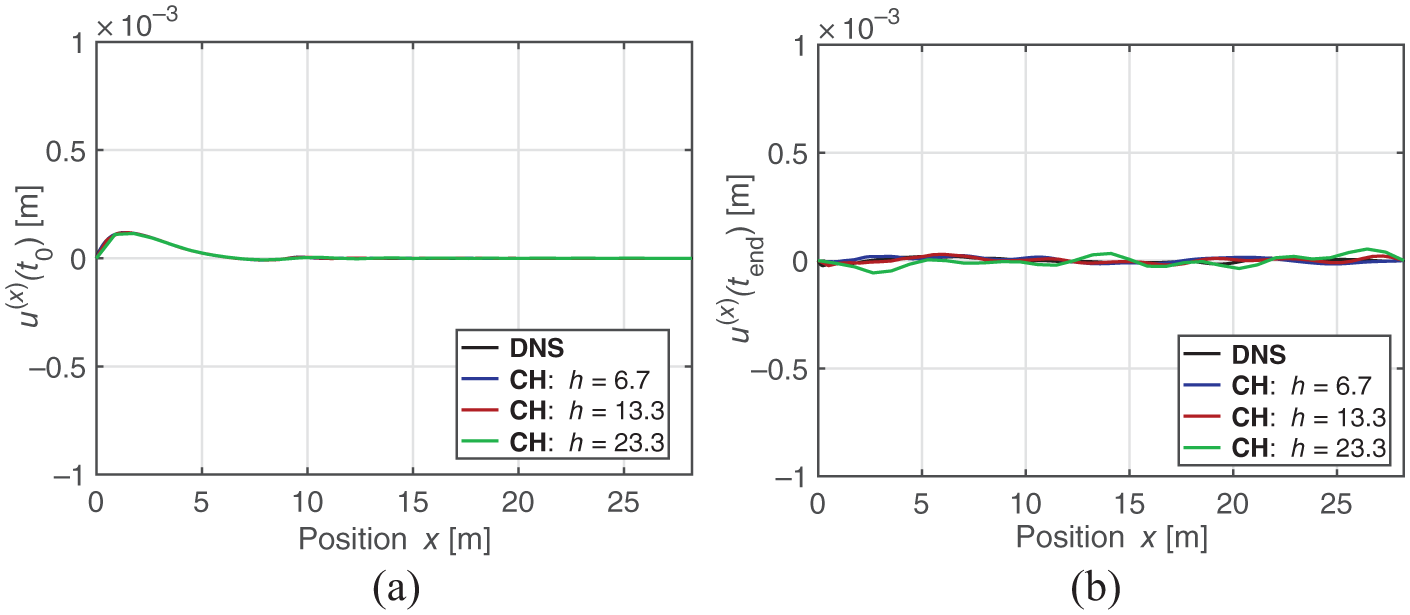
Displacement response along the considered nonlinear metamaterial structure with length
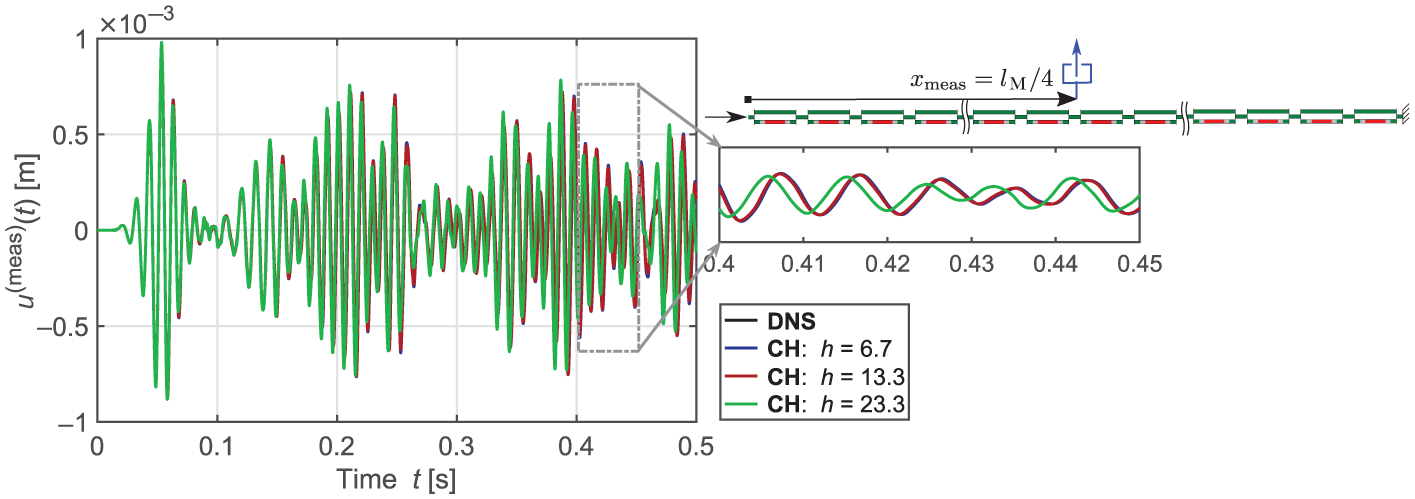
In Figure 14, the transient response of the nonlinear metamaterial measured at
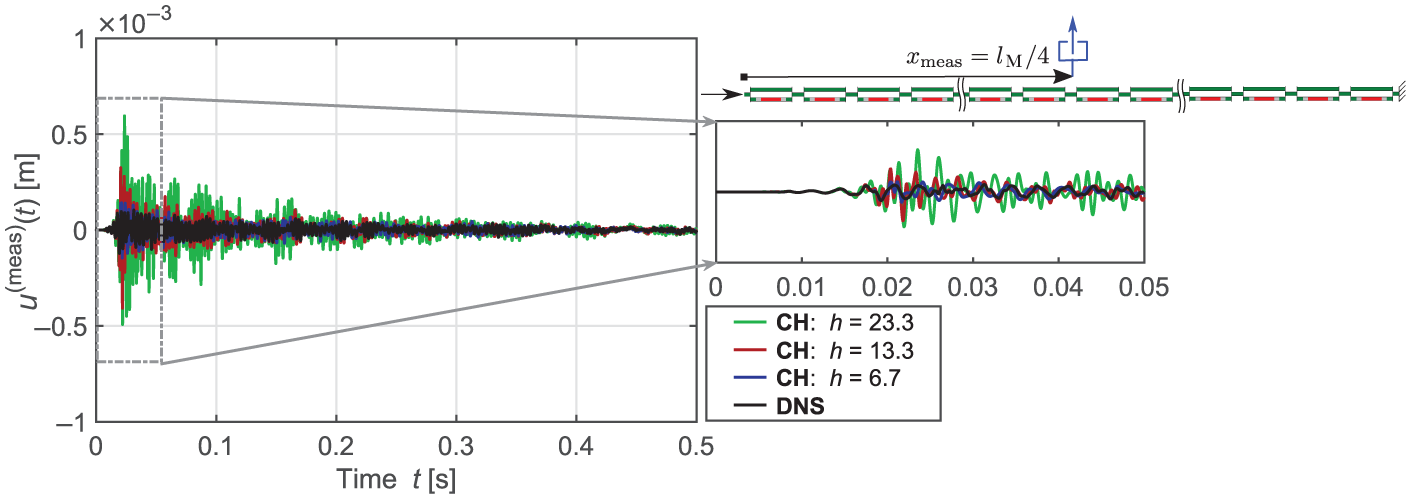
Temporal displacement response of the considered nonlinear metamaterial structure with length
The main drawback of the transient structural dynamic analyses via direct numerical simulations is the excessive computational time, especially when fine microstructures with nonlinear features are being considered. For the present transient test cases, the CPU times required for the direct numerical simulation are compared with the computational homogenization simulations in Table 2. In both test cases, for homogenization levels
Computational time required to perform transient structural dynamic analysis in the considered nonlinear locally resonant metamaterial structure of finite size.
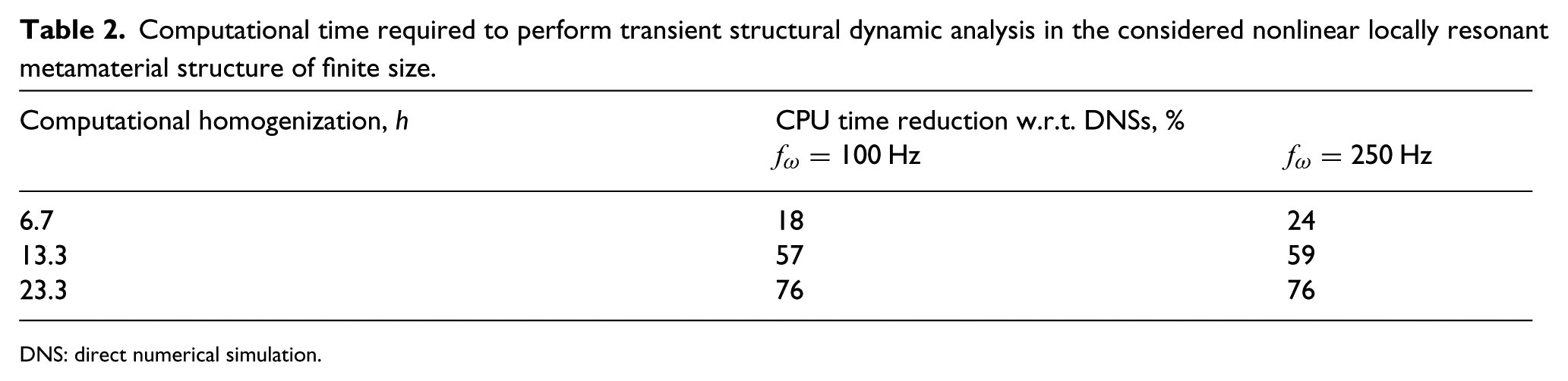
DNS: direct numerical simulation.
5. Conclusions
In this paper, the computational homogenization framework for solving fully transient multi-scale problems proposed by Pham et al. [23] has been extended and applied to the transient dynamic analysis of a nonlinear locally resonant acoustic metamaterial. The main focus of this contribution was on the incorporation of microscopic nonlinearities in a transient computational homogenization framework. In the present case, the macroscopic tangent constitutive tensors are no longer constant, and nested sets of nonlinear equations at both scales need to be solved iteratively in combination with an implicit time integration scheme. The expressions for the macroscopic constitutive tangents have been derived as functions of the microscopic iterative tangent matrix and used to determine the iterative tangent matrix at the macroscopic scale.
Transient numerical analyses of a 1D version of Liu’s locally resonant metamaterial have been performed to evaluate the proposed computational homogenization framework and its numerical implementation. The periodic unit cell included rubber-coated inclusions, in which the rubber phase was described by the neo-Hookean material model. The performance of the computational homogenization scheme in capturing the dynamics of this nonlinear metamaterial was assessed in two situations, i.e.: (i) under free wave propagation in an infinitely long structure and (ii) transient structural dynamics of a finite-size structure. In both cases, the results were compared with those obtained from direct numerical simulations.
In the case of wave propagation analysis, for all considered macroscopic discretizations, the computational homogenization framework was able to adequately capture the local resonant band gap characteristics of the considered metamaterial. The computational homogenization showed quite good accuracy for all homogenization levels. The transient analysis of a finite-size nonlinear metamaterial demonstrated the potential of the computational homogenization framework as an efficient alternative to the conventional direct numerical simulations in nonlinear structural dynamic analysis. Accurate results were obtained with significant computational time savings. In both numerical studies, the accuracy of the computational homogenization framework deteriorated for higher levels of homogenization, as expected, but very good agreement was obtained for homogenization as high as
Footnotes
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: This work was supported by the European Research Council under the European Union’s Seventh Framework Programme (FP7/2007-2013, grant number 339392) and the 4TU.High-Tech Materials Research Programme “New Horizons in Designer Materials” (![]() ).
).