
Abstract
A new approach to finding the approximate solution of distributed-order fractional optimal control problems (D-O FOCPs) is proposed. This method is based on Fibonacci wavelets (FWs). We present a new Riemann–Liouville operational matrix for FWs using the hypergeometric function. Using this, an operational matrix of the distributed-order fractional derivative is presented. Implementing the mentioned operational matrix with the help of the Gauss–Legendre numerical integration, the problem converts to a system of algebraic equations. Error analysis is proposed. Finally, the validation of the present technique is checked by solving some numerical examples.
Keywords
Introduction
There exist many real-life phenomena that can be modeled by different types of optimal control problems such as harmonic oscillator (Banks and Burns, 1978), chemotherapy for breast cancer (Newbury, 2007; Sabermahani and Ordokhani, 2019), electrical networks (Bahaa, 2017), and cancer treatment (Hassani et al., 2021). Also, some applications of OCPs appeared in Bohannan (2008); Sua’rez et al. (2008).
The existence of solutions to various classes of these problems is studied in Liu et al. (2021, 2020, 2022b, 2019). Moreover, in some cases of the mentioned problems, often in applications, it is not possible to find a solution for OCPs in analytical form. Then, various techniques are developed to solve them. The author in Liu et al. (2022a) investigated fractional optimal feedback control problems with history-dependent operators in separable reflexive Banach spaces. A sensitivity analysis for fractional optimal control problems is presented in Liu et al. (2018). Also, some other numerical techniques developed to find solutions for these problems are the fractional Boubaker wavelet method (Rabiei and Razzaghi, 2022), the Bernoulli wavelet method (Barikbin and Keshavarz, 2020), a method based on hybrid biorthogonal cubic Hermite spline multiwavelets (Mohammadzadeh and Lakestani, 2018), the radial basis functions and collocation method (Chen et al., 2020), Dickson polynomials (Chen et al., 2021), and so on.
The fractional derivative is a special case of the disturbance-order fractional derivative. In recent years, the D-O fractional derivative has been used to model some phenomena, which has led to a clearer model of the behavior of the system or the phenomenon in question and a more accurate analysis of the behavior of a phenomenon. The D-O FOCP is one of the important types of OCPs. Recently, the D-O FOCP has been considered by researchers, and studies have been conducted on these kinds of problems.
The authors in Gariboldi and Tarzia (2007) investigated the convergence of D-O optimal controls using the penalization method. Foderaro and Ferrari (2010) presented the necessary conditions for the optimality of a class of D-O FOCPs. A Legendre pseudo-spectral method is proposed to solve distributed optimal control of the viscous Burgers equations (Sabeh et al., 2016). Bezier curves are used to solve a class of D-O OCPs (Darehmiraki et al., 2016). Zaky proposed a Legendre collocation method to solve D-O FOCPs (Zaky, 2018).
In order to make a more comprehensive investigation of the studies done on the subject of this manuscript, we present a brief bibliometric analysis. For this approach, we consider the following main keyword for data collection in Scopus and Core collocation of Web of Science (WoS) (Sabermahani and Ordokhani, 2021b): ((TITLE(“optimal control problem*”) OR TITLE(“OCP*”)) AND (TITLE(“distributed”) OR TITLE(“distributed-order”) OR TITLE(“distributed order”)))
The title search for the search term on April 21, 2022, led to the retrieval of 142 documents from Scopus and 107 documents from WoS.
Figure 1 illustrates the publication trends in Scopus and WoS in the period 1964–2022. The number of publications in the research area from 1964 to 2022.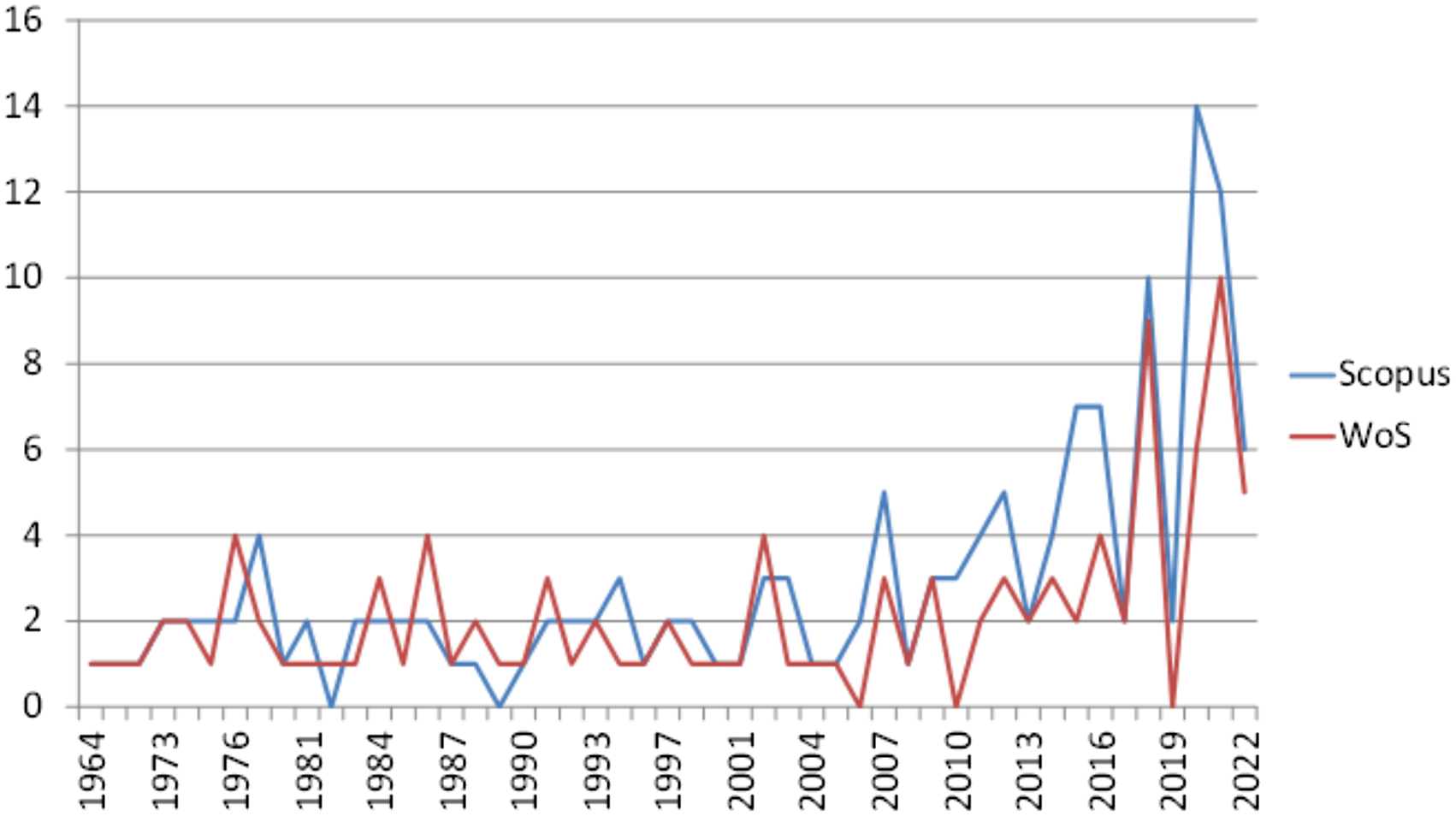
In WoS, H-index is “17” and the average per item is “13.05” which is an acceptable value for Mathematics. Due to the application of the mentioned problem, Figure 2 displays the subject area of documents in Scopus. The subject area of documents in Scopus.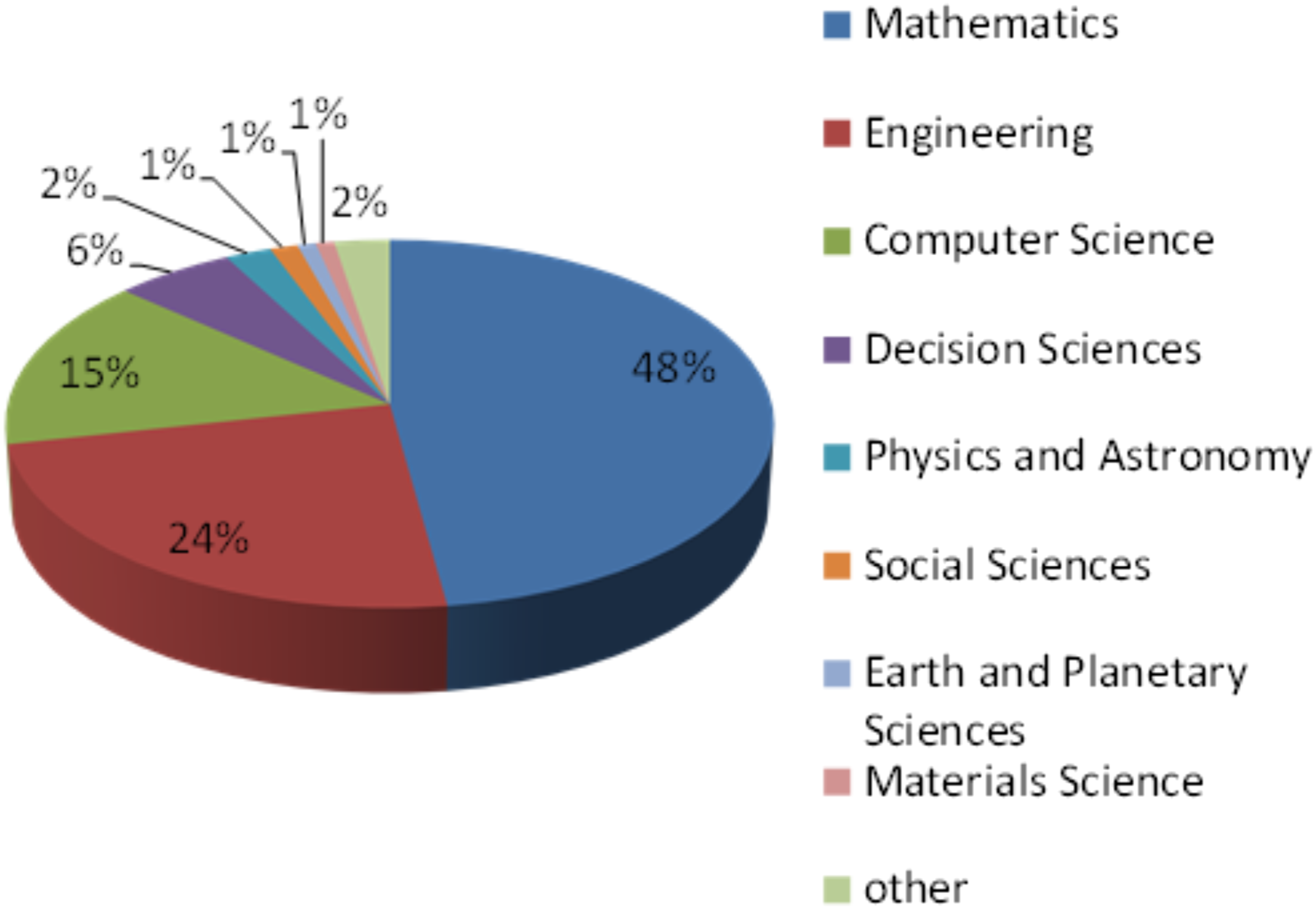
Moreover, Figure 3 demonstrates a bibliometric map through VOSviewer. In this figure, the map is plotted as a network during the span of time. The relationships between achieved network data Scopus in considered span.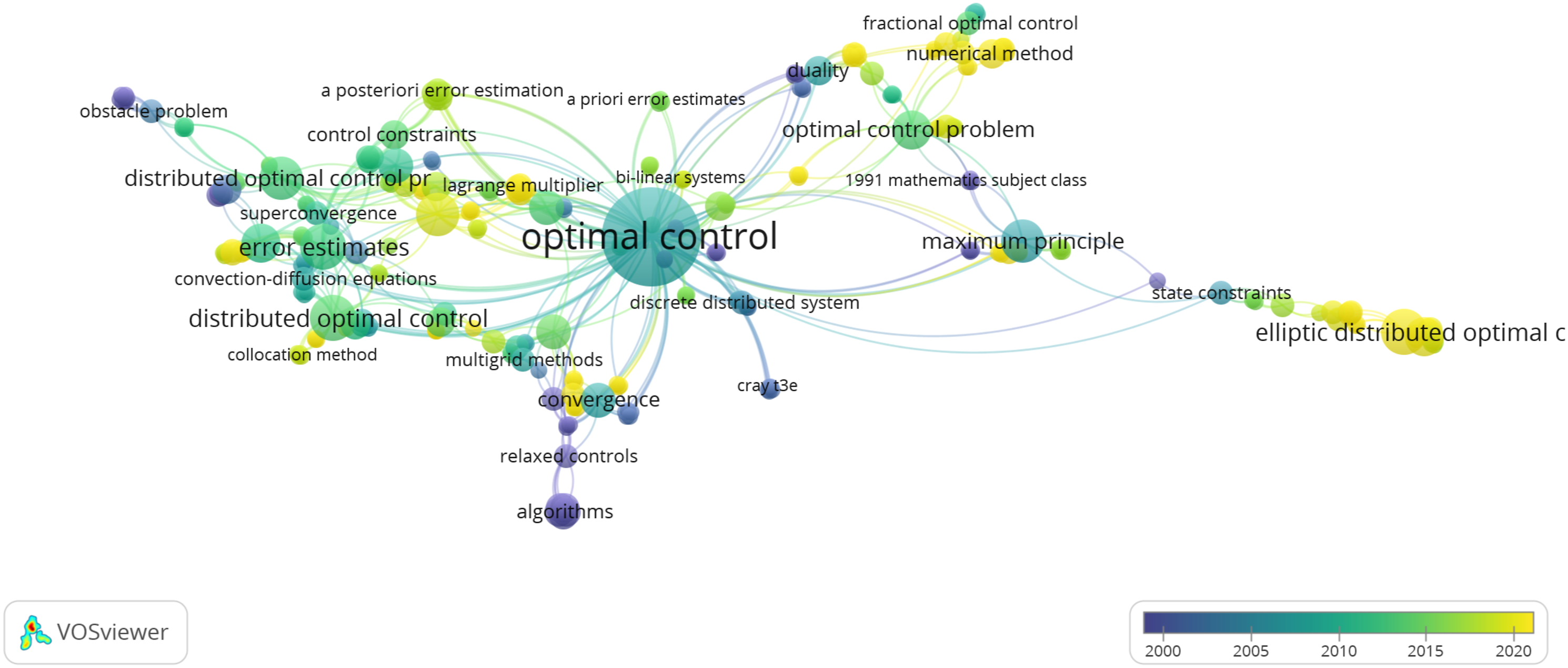
Due to the above discussion, we consider the D-O FOCP in the following form



A generalization of the Caputo fractional derivative (see Sabermahani et al., 2020b) is the D-O fractional derivative. For ξ(ϱ) = δ(ϱ−ν) which is the Dirac delta function, In recent years, the important and efficient effects of wavelets have been proven in solving various problems with smooth and non-smooth solutions. In this study, the Fibonacci wavelet has been used as the main tool in providing an efficient computational method for solving D-O FOCPs. Fibonacci polynomials have some advantages which have been mentioned in different studies. For instance, the advantages Fibonacci polynomials have over shifted Legendre polynomials are listed in Sabermahani et al. (2020a): • Fibonacci polynomials have fewer terms than the shifted Legendre polynomials, which reduces CPU time using Fibonacci polynomials. • The coefficient of individual terms in Fibonacci polynomials is smaller than corresponding ones in shifted Legendre polynomials, which reduces CPU time using Fibonacci polynomials. • The integration operational matrix of Fibonacci polynomials has less error than the same operational matrix for shifted Legendre polynomials. These properties are also inherited from Fibonacci wavelets. Then, considering the feature of Fibonacci wavelets, we present a new computational method for solving an important class of fractional optimal control problems. Here, a new fractional integration operational matrix based on the hypergeometric function is proposed for these wavelets. The properties of the operational matrix have reflected well in the process of the numerical scheme and created an approximate solution with high precision. Next, with the help of this operational matrix and the Gauss–Legendre integration formula, a new D-O fractional derivative operational matrix is presented for Fibonacci wavelets. Then, by applying these achievements, we solve the considered problem. On the other hand, most of the proposed numerical methods based on spectral methods take control variables from the existing dynamic system in the problem and place them in the performance index. Then, the numerical method is proposed to solve the resulting problem by approximating the state variable. However, in this paper, the control variable and the largest order derivative of the state variable are approximated using Fibonacci wavelets, and the proposed method is presented by using the mentioned approximations in the performance index and dynamic system, with the help of Lagrangian multipliers.
FW and approximation function
Fibonacci polynomials φ
ζ
(t) are defined by the following formula (Falcon and Plaza, 2009)
If • • The series converges absolutely.
where
If Also, the truncation error of the generalized Fibonacci polynomials is discussed in Abd-Elhameed and Youssri (2019). For t ∈ [0, 1), An arbitrary function



FW operational matrix of the Riemann–Liouville integral
Here, we consider the Riemann–Liouville integral operator of order ν > 0 for a continuous function, which is defined as follows (Sabermahani et al., 2020b)

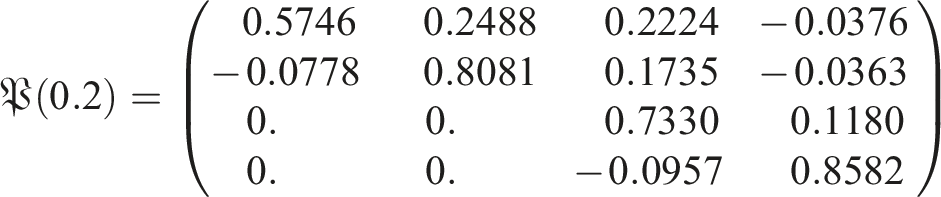
Then, a new operational matrix of the Riemann–Liouville fractional integration for FWs is proposed. Also, in this section, a new D-O fractional derivative operational matrix for FWs is presented. Due to the aforesaid equation and its property, and the hypergeometric function, we achieve the Riemann–Liouville operational matrix for FWs, where

For this aim, the following lemma is recalled.
If
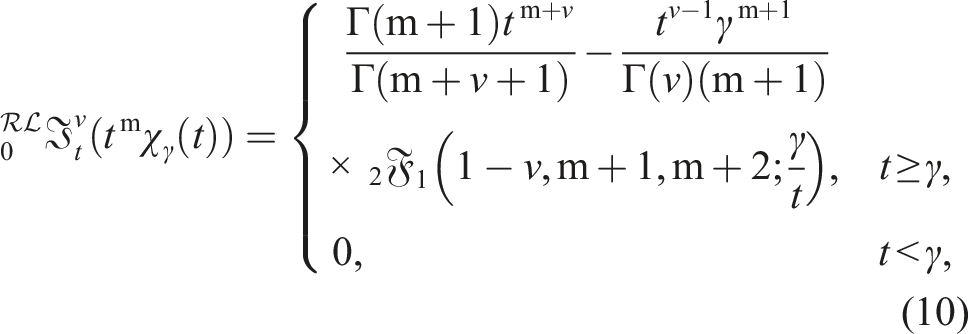


For ν > 0, we have
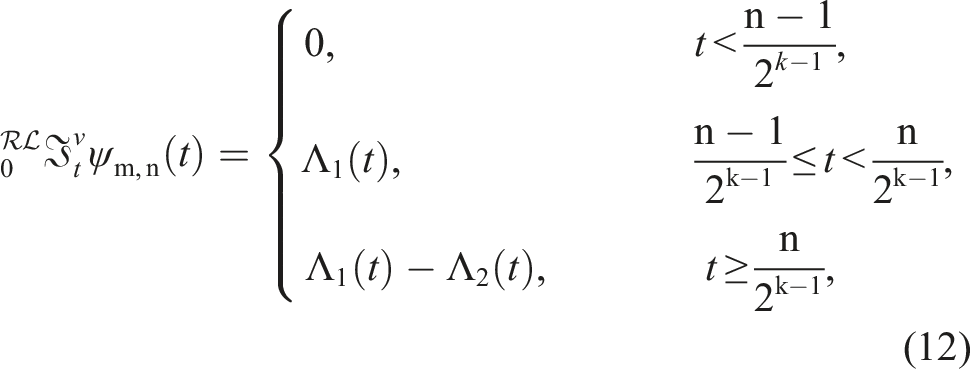






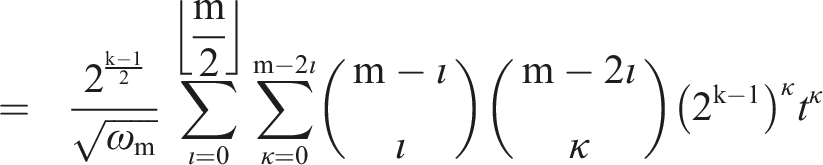
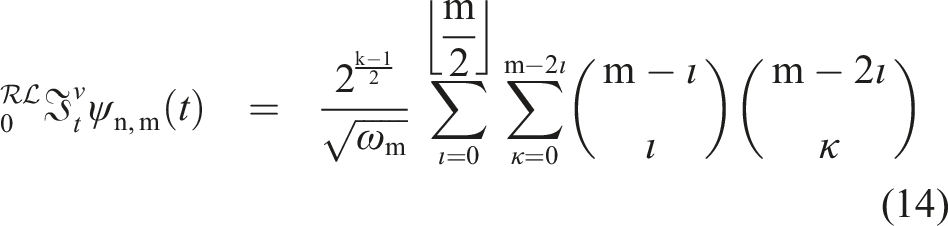
Due to equations (4) and (5), FWs can be rewritten as Due to the linearity of the operator Then, using Lemma 1 and equation (14), we get Then, the proof is complete. Now, to present the FW operational matrix of the Riemann–Liouville integral, we approximate










Description of the present method
According to Remark 1, we divide our numerical method into the following two cases and explain our method for each case.
By considering problem given in equations (1) and (2), we suppose that According to the Riemann–Liouville operational matrix presented in the previous section, we obtain Substituting equations (17)–(19) into equation (2), we achieve Next, by substituting the approximation in equations (17)–(19) in the performance index Then, the relations in equation (23) can be solved by applying the “Find Root” package in “Mathematica software.” By computing the coefficient vectors








In this case, by considering the problem given in equations (1) and (2), we suppose that


Considering


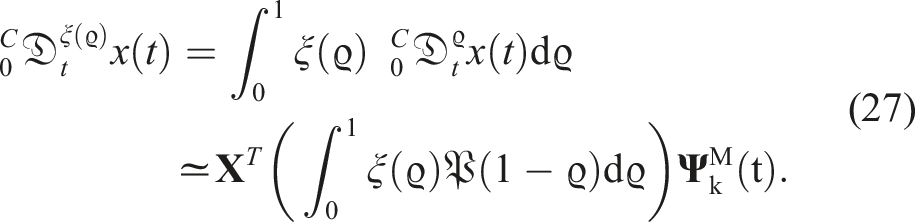
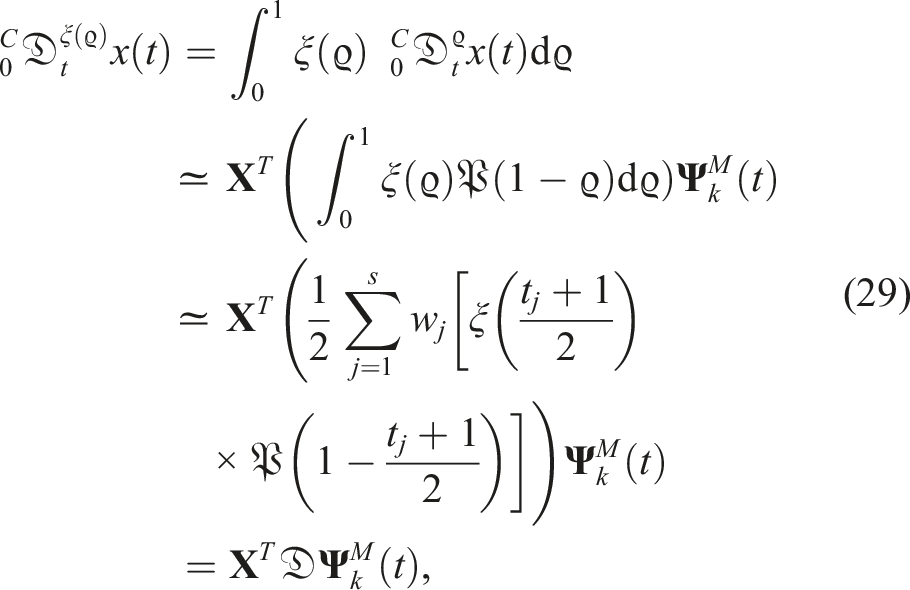
Using the Riemann–Liouville operational matrix, we have Utilizing the Gauss–Legendre quadrature scheme for evaluating the integral in equation (27), we achieve Now, by substituting equations (18), (24)–(26) into equation (2), we derive Next, by substituting the approximation in equations (18) and (25) in the performance index The “Find Root” package is used to solve the above system of algebraic equations.








Error analysis
In this section, we propose an error bound of the D-O fractional derivative defined in equation (3).
Assume y ∈ H
ϑ
(0, 1), ϑ ≥ 0 and


Assume y ∈ H
ϑ
(0, 1), ϑ ≥ 0 and 0 ≤ ϱ < 1, so

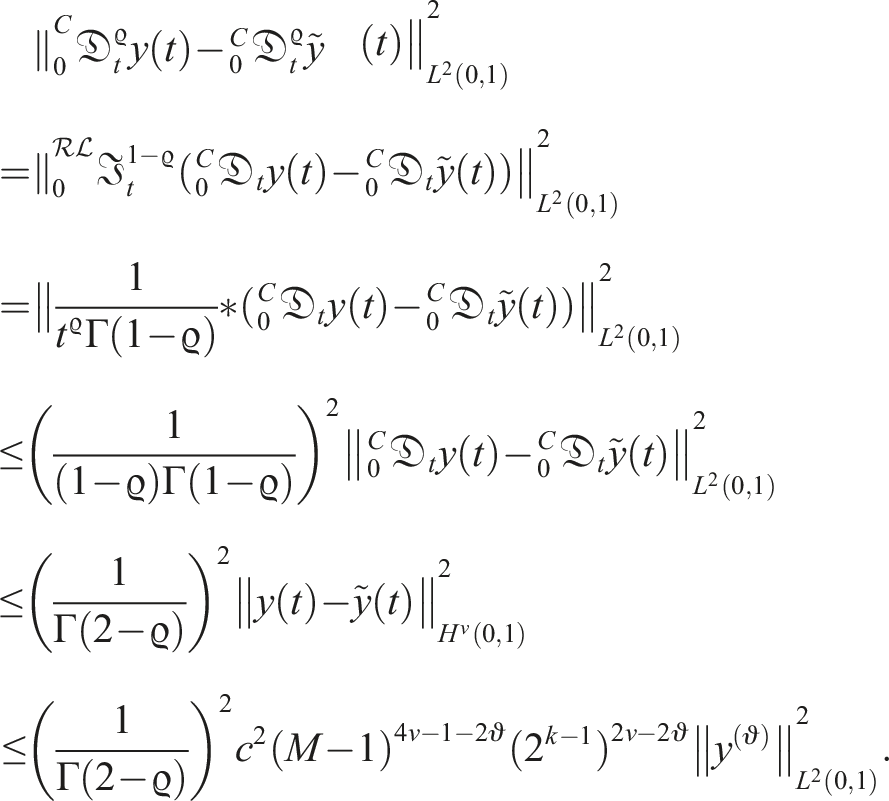
We know the following relation holds for the Riemann–Liouville fractional integration and the Caputo fractional derivative Now, using equations (8), (34), and (35), the above relation for n = 1, and (Richard, 2013) Taking the square root of the above equation, the proof is complete.


Assume y ∈ H
ϑ
(0, 1), ϑ ≥ 0, M ≥ v, then


Suppose that
Algorithm implementation and numerical experiments
In this section, we propose the numerical results achieved by the present scheme. To confirm the theoretical prediction, three numerical experiments are carried out by considering the following items. The computations associated with the examples were performed using Mathematica 12.3 on a 2.67 GHz Corei5 personal computer with 4 GB of RAM.
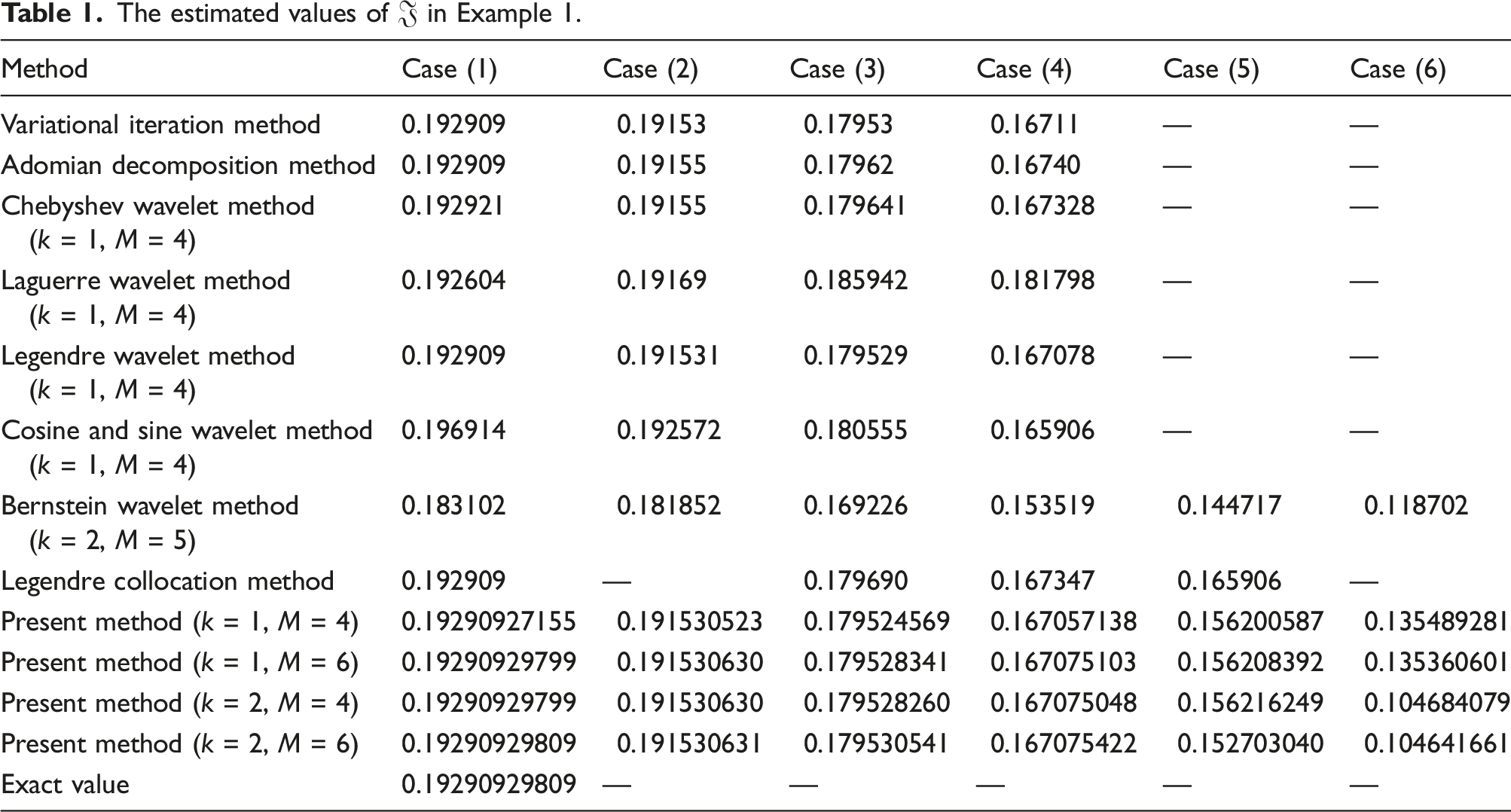
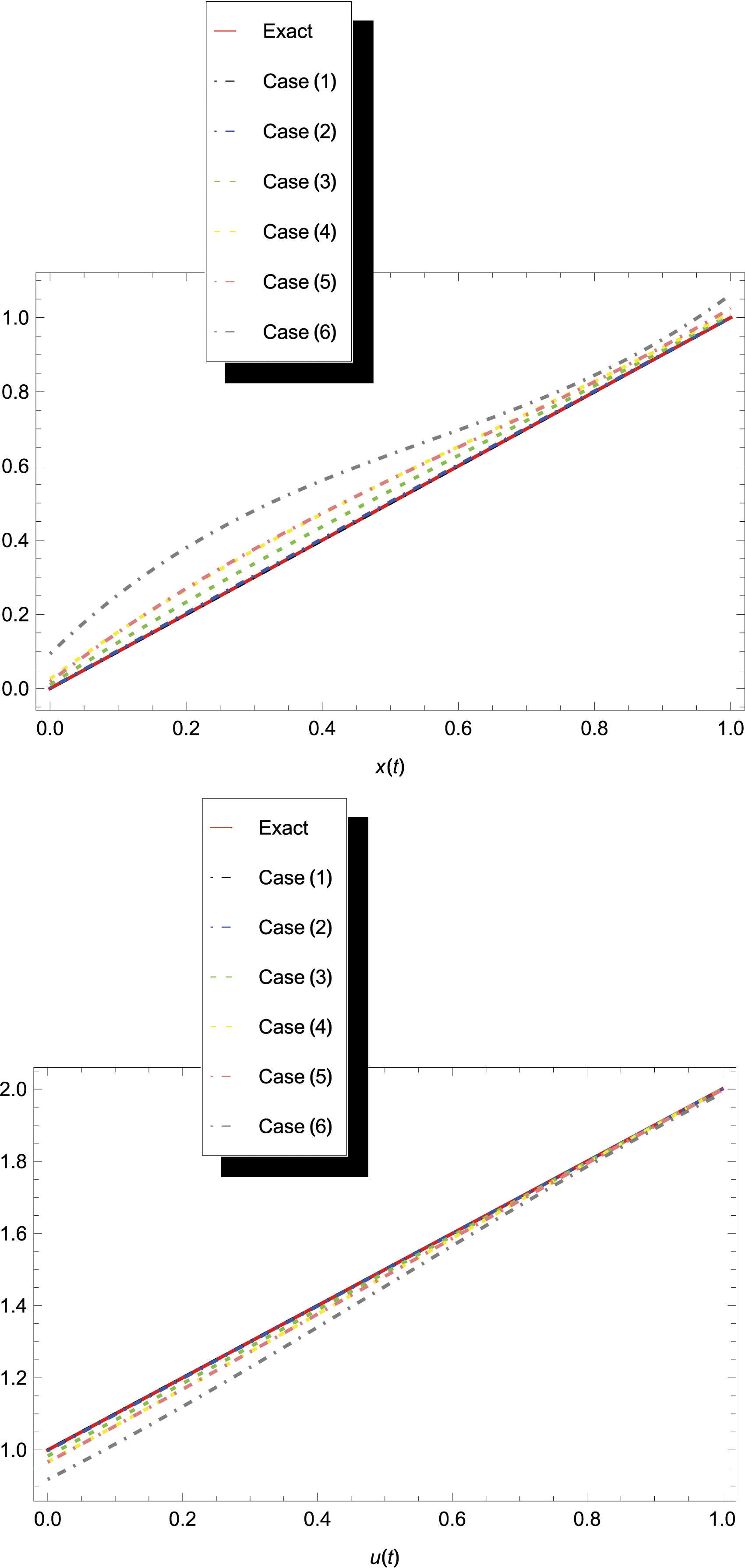
Here, we consider some cases for the distribution functions as follows: ▶ Case (1): ξ(ϱ) = δ(ϱ−1), ▶ Case (2): ξ(ϱ) = δ(ϱ−0.99), ▶ Case (3): ξ(ϱ) = δ(ϱ−0.9), ▶ Case (4): ξ(ϱ) = δ(ϱ−0.8), ▶ Case (5): ▶ Case (6):
in which
As the first example, we consider the following optimal control system with a distributed-order function described by The optimal values of Also, the other cases do not have optimal solutions. To approximate the value of The numerical results of the performance index






The estimated values of
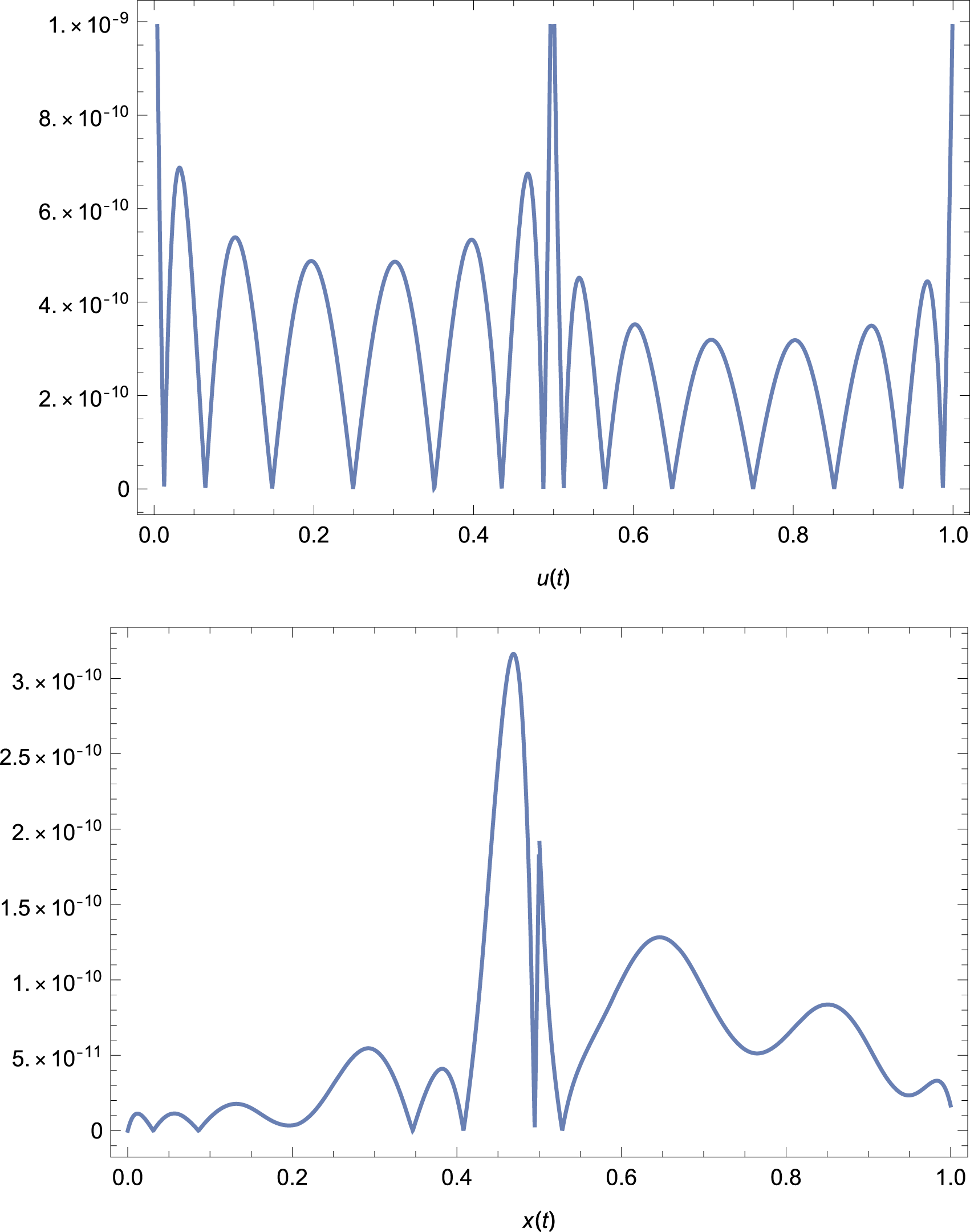
The absolute errors of state variable x(t) and control variable u(t) with k = 2, M = 7, for Case (1), in Example 1.
Comparison of the exact and approximate solution of state variable x(t) and control variable u(t) with k = 1, M = 4, for different considered cases in Example 1.
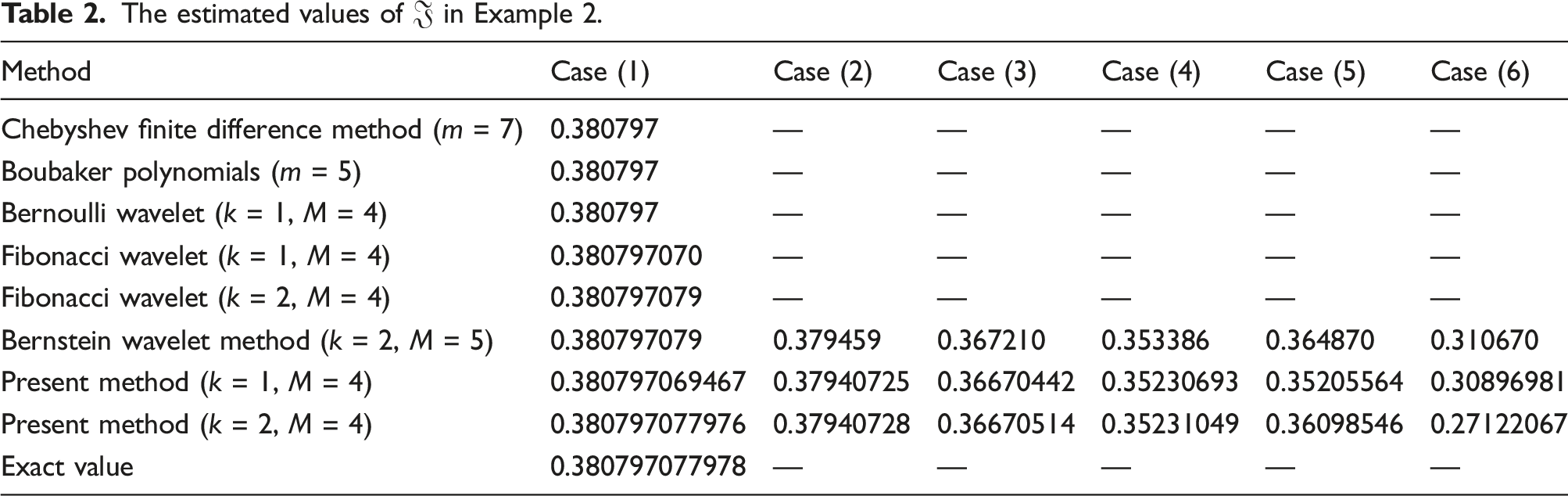
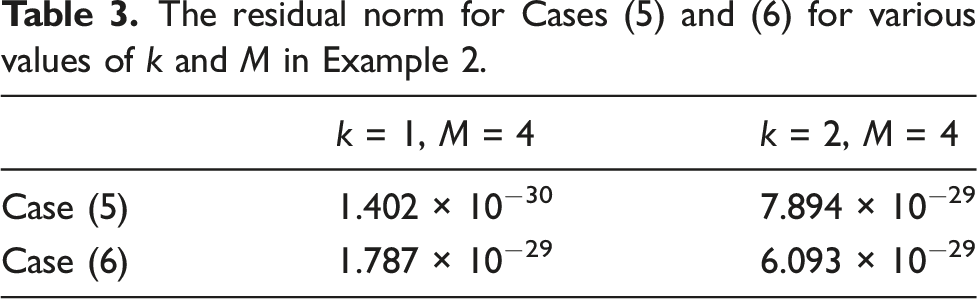
We consider the following C-O FOCP This problem is solved by using some numerical methods such as the Chebyshev finite difference method (El-Kady, 2003), the Boubaker polynomials (Rabiei et al., 2017), the Bernoulli wavelet (Barikbin and Keshavarz, 2020), the Fibonacci wavelet (Sabermahani and Ordokhani, 2021a), the Bernstein wavelet method (Rahimkhani and Ordokhani, 2021), and so on. We compare the functional value Table 3 shows the residual norm for Cases (5) and (6) for various values of k and M.




The estimated values of
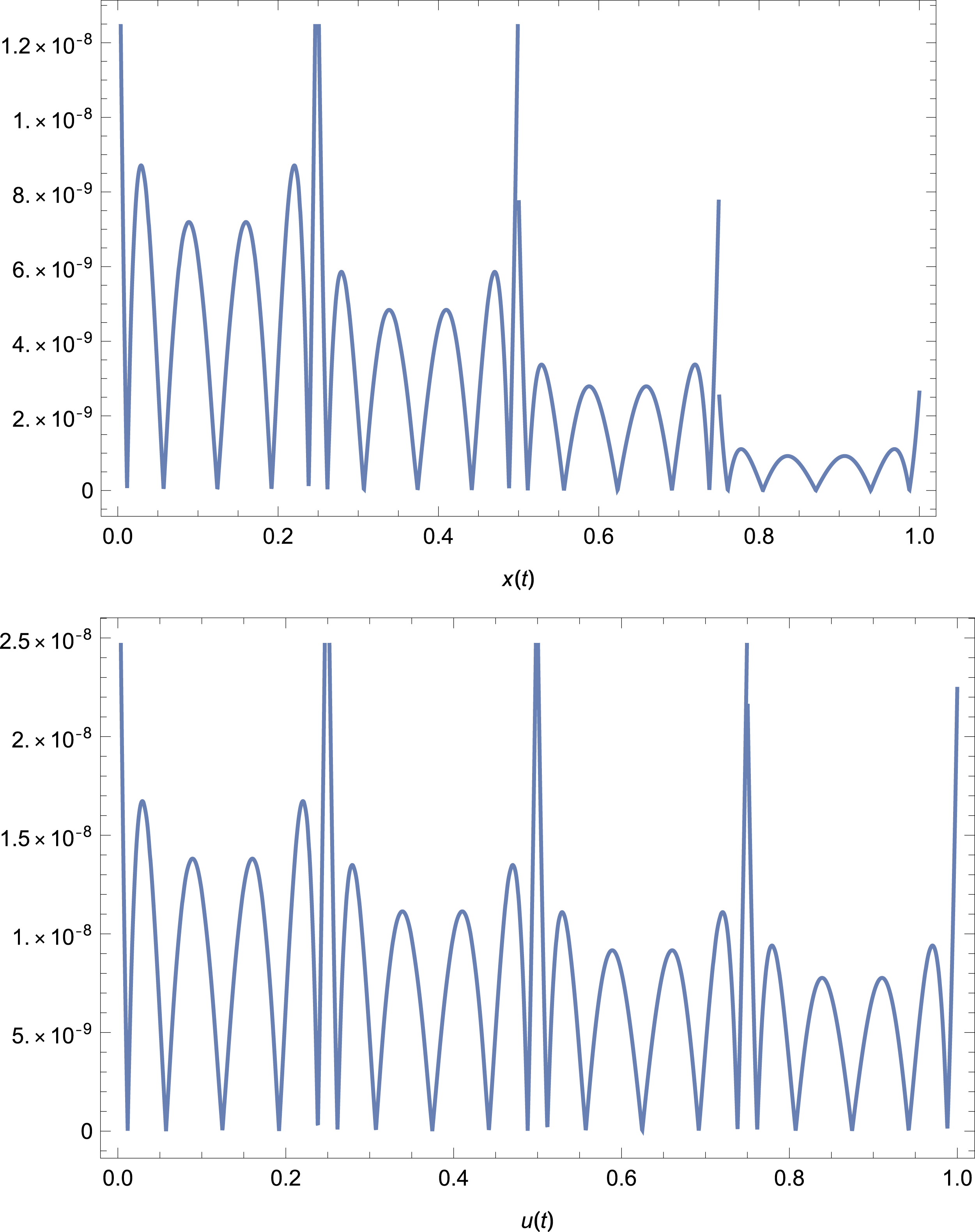
The absolute errors of state variable x(t) and control variable u(t) with k = 3, M = 5, for Case (1), in Example 2.
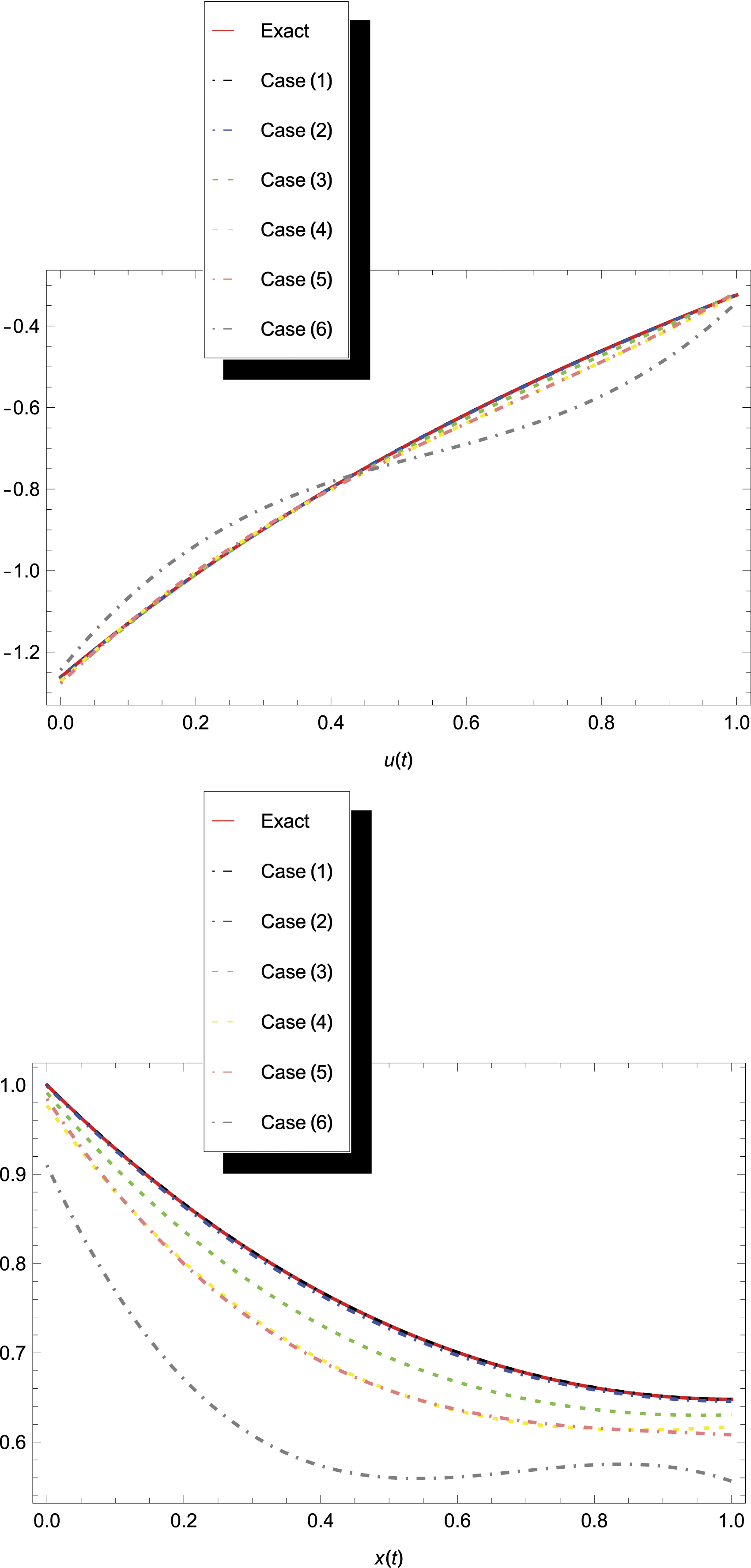
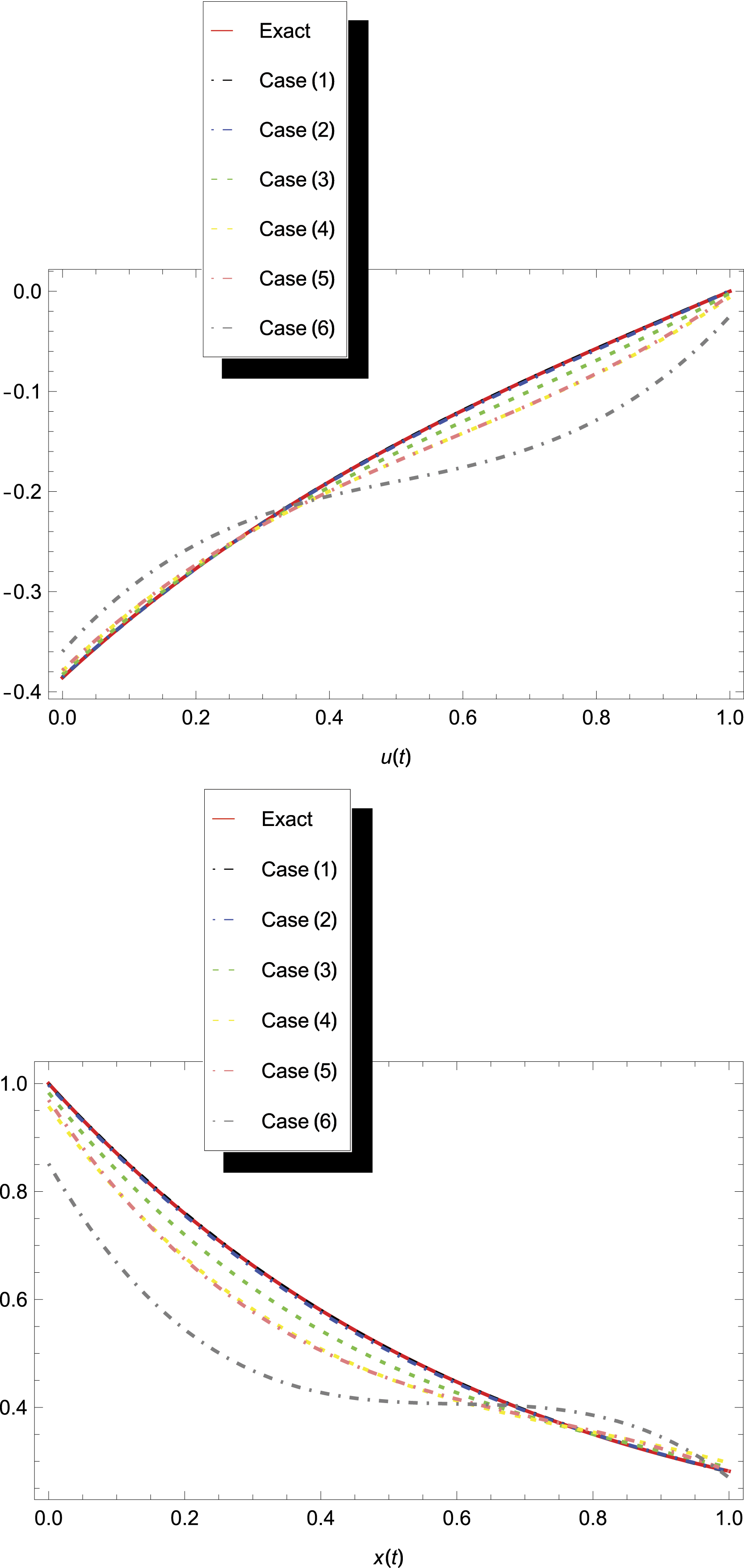
Comparison of the exact and approximate solution of state variable x(t) and control variable u(t) with k = 1, M = 4, for different considered cases in Example 2.
The residual norm for Cases (5) and (6) for various values of k and M in Example 2.
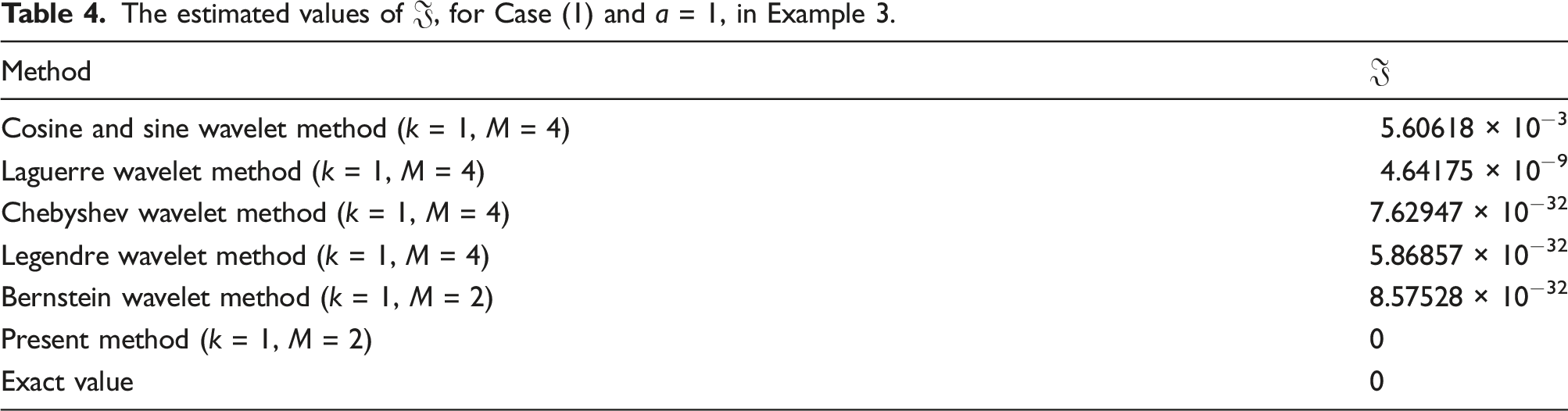
We consider the following time-varying C-O FOCP For Case (1) and a = 1, we implement the proposed scheme with k = 1, M = 2 to solve this problem. By expanding 





The estimated values of
The estimated values of

The estimated values of

Comparison of the exact and approximate solution of state variable x(t) and control variable u(t) with k = 1, M = 4, for different considered cases in Example 3.
Conclusion
A class of optimal control problems involving the distributed-order fractional derivative has been investigated. A computational scheme has been successfully employed for solving considered problems. The method is based on Fibonacci wavelets. Some useful error bounds have been established. The corresponding Riemann–Liouville operational matrix has been constructed, and using this, the operational matrix of the distributed-order fractional derivative is presented. These matrices together with the Gauss–Legendre numerical integration are used to discretize the considered optimal control problems. In general, the present scheme is a more accurate solution than some existing techniques. To verify the computational efficiency of the developed method, this method has been applied to several numerical experiments. It has been found that selecting an appropriate value for k and M is needed to derive a high accuracy and satisfactory convergence. The simulation results confirm this claim.
Considering the high effectiveness of wavelets in solving different types of problems, in the future, by defining fractional-order Fibonacci wavelets, we can have one more degree of freedom (α) to these functions in addition to K and M. Therefore, with the new tool, fractional Fibonacci wavelet, we can design effective numerical methods to solve different types of fractional problems arising in science and engineering.
Also, stability analysis of the suggested method for the numerical solution of the mentioned problems and applying this scheme for solving various kinds of fractional equations such as fractional partial differential equations, delay fractional optimal control problems, and fractional integro-differential equations are interesting problems for future works.
Footnotes
Acknowledgments
The authors are very grateful to the reviewers for carefully reading the paper and for their valuable comments and suggestions that have improved this paper.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.