
Abstract
Active control algorithms are widely used in enclosed-space noise control with the nonlinearities of secondary-source loudspeakers ignored. Inspired by nonlinear energy transfer resulting from nonlinear stiffness, this work concerns using a nonlinear loudspeaker to improve enclosed-space noise control. An enclosed-space active noise control system with a nonlinear loudspeaker is modeled. Based on the model, an approximate frequency response function of the noise control system is derived analytically via the harmonic balance method and verified using numerical methods. A globally consistent and bounded Lyapunov function is derived. The effects of the mass, nonlinear stiffness, volume, and area ratio on the noise reduction are also explored. Both analytical and numerical results demonstrate that the improved nonlinear loudspeaker is effective in improving the low-power characteristics of the loudspeaker, increasing noise reduction and improving fault-tolerant and robustness of the active noise control system.
1. Introduction
Active enclosed-space noise reduction is significant in aerospace, vehicle, and marine engineering (Liu et al., 2022; Chen et al., 2022; Lane et al., 2006). Loudspeakers as the actuators for active noise control (ANC) work on the principle of interference phase cancellation (Zhou et al., 2013). However, linear loudspeakers have inherent structural drawbacks, such as low-power characteristics and narrow working frequency bands (Yang et al., 2018; Sahib and Kamil, 2014; Berger et al., 2003; Das and Panda, 2004). Inspired by nonlinear energy transfer resulting from nonlinear stiffness (Kovacic et al., 2008), nonlinear loudspeakers have been proposed for active enclosed-space noise control. The present work focuses on widening the frequency band of active noise control (ANC) systems for enclosed-space noise reduction based on a nonlinear control algorithm. Active control systems and actual situations need to be properly combined in order to provide a wide frequency band for the noise isolation and noise reduction system. Some research methods have shown the usefulness of ANC combined with semi-infinite barriers in improving the noise reduction performance band for workplaces where the noise-source location is fixed. However, this method is not applicable to the case where the target noise location varies with time (Lee et al., 2022).
Recently, nonlinearity has been used to improve the performance of vibration systems. Zhao et al. (2020) and Wang et al. (2019) investigated a nonlinear vibration isolator composed of three springs, in order to overcome the problem that traditional vibration isolators do not adapt to the effect of high static and low dynamic stiffness (HSLDS). Quasi-zero stiffness can be achieved through careful selection of system parameters, thus balancing the tradeoff between vibration isolation and static deflection. In contrast to the vibration isolation systems mentioned above, many novel designs of vibration isolation have been proposed. The importance of corrected transmissibility has been emphasized by Lu et al, 2016 in a two-stage nonlinear vibration isolation system consisting of two linear isolators connected by two additional horizontal linear springs. However, since the folding ring in the loudspeaker produces a nonlinear restoring force, an antiresonance peak appears in the system, which affects the noise reduction system. In light of these factors, the stiffness nonlinearity in the loudspeaker has been used to improve the noise reduction performance.
Nonlinear control algorithms are important for enhancing nonlinear noise control systems. Based on the above-mentioned introduction of structural nonlinearity factors to broaden the frequency band, the application of nonlinear control algorithms is also particularly important. Some research on the filter-x least mean squares (FxLMS) algorithm and deformations have been widely used in ANC systems (Meng and Chen, 2021; Das et al., 2012b; An et al., 2021). However, the FxLMS algorithm can be applied only to linear systems, and it is not applicable for the nonlinear noise isolation system studied in this paper. Moreover, this ANC system cannot effectively achieve coherence in the noise isolation and noise reduction system when the noise type is random or multi-frequency. The compensation of the nonlinear distortion with preprocessors is also an important issue—for example, in the neural network algorithms developed for nonlinear active noise control (NLANC) (Wu et al., 2018). The second-order Volterra filter approximation algorithm can be used to reduce the nonlinear distortion of the loudspeaker (Frank, 1995). In addition to the above-mentioned second-order Volterra filter approximation algorithm, many novel Volterra filter approximation control algorithms have been proposed, such as the bilinear filter algorithm and its optimization algorithm (Kuo and Wu, 2005; Tan et al., 2016; Rohlfing and Gardonio, 2014; Le et al., 2019). The idea of the active enclosed-space noise control algorithm is to compensate for the nonlinearity of the auxiliary path by increasing the nonlinearity of the controller. This approach cannot effectively and accurately deal with the nonlinearity introduced into the structure and improve the noise reduction performance accurately.
The nonlinear control algorithm is an effective way to solve the issue of the enclosed-space noise control with nonlinearity. The second-order Volterra filtered-x LMS (VFXLMS) and Filtered Least Mean Square (FSLMS) algorithms are commonly used in multi-input nonlinear ANC strategies, such as (Dong et al., 2020). Another effective nonlinear analysis method is based on the convex combination algorithm of Filtered-S Least Mean Square (FSLMS) algorithm and Generalized Functional Link Artificial Neural Network (GFLANN). The results show that the coupled structure has a significant improvement in control performance compared with the single structure. At the same time, its efficiency in noise reduction is also verified (George and Gonzalez, 2013). Similar combination methods are also used to achieve fast convergence and low steady-state error of the noise reduction system (Yin KL et al., 2020; Zhao et al., 2016). In addition to the above work on nonlinear systems, Larbaoui et al. (2021) and Belabbes and Larbaoui (2015) proposed the Lyapunov’s second method to obtain a robust controller and tracking the controlled system’s signal by the backstepping method which is often used in noise reduction systems. In the present work, in order to explore the flexibility of this technique, the obtained prediction results are presented in the different parameters. In theoretical perspective, this method is more accurate than the above methods in modeling the system. Simultaneously, it can better exploring the influence of nonlinearity on the system.
Although these studies on noise control algorithms are important, few control algorithms on the nonlinearity embodied in the structure have been studied. Moreover, the input signal causes nonlinear distortion in the loudspeaker when it is too large. To deal with the substantial uncertainty in the loudspeaker parameters and the limitations of the input control, Zhu et al. (2019) applied a linear matrix inequality to the controller and designed a robust state feedback controller while tracking the derived state feedback signal using the backstepping method to achieve noise reduction at the fundamental frequency (Bu et al., 2018; Chen and Guo, 2005). This study aims at designing an enclosed-space ANC system with a nonlinear loudspeaker to improve the low-power characteristics of the loudspeaker and the effect of noise reduction. Figure 1 shows the closed-loop control flow of the confinement system. Diagram of closed-loop active control algorithm.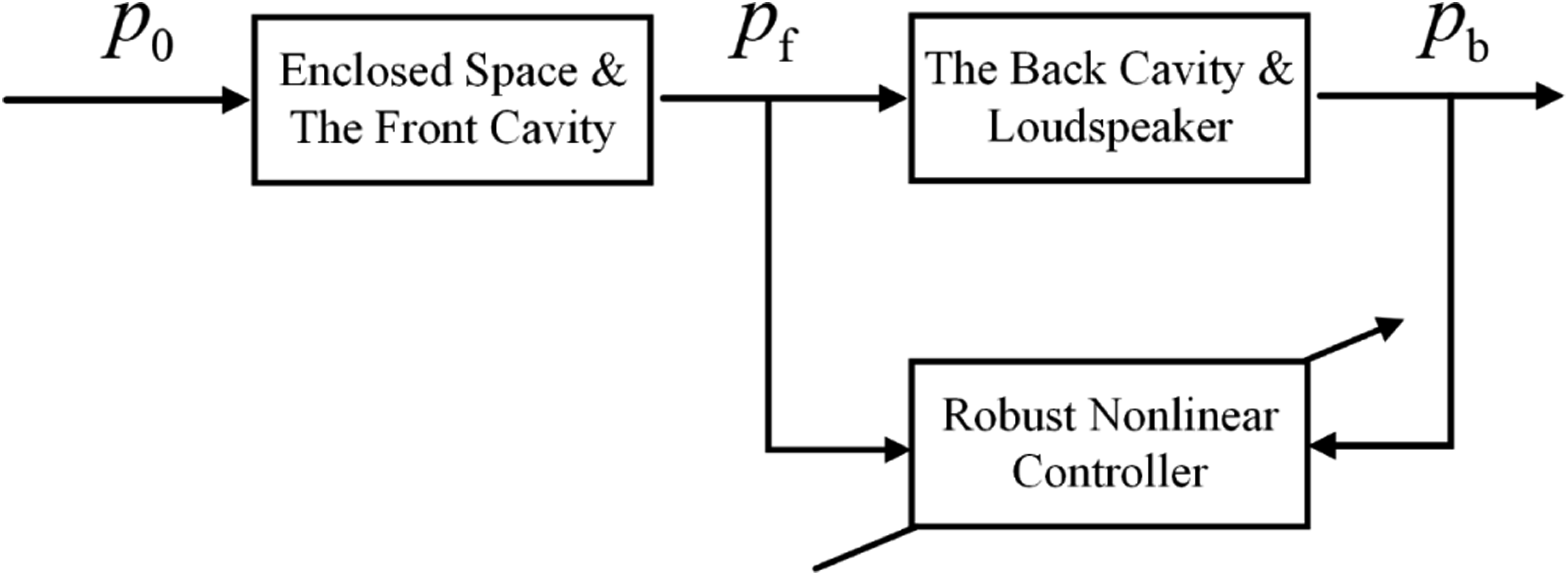
The balance of this paper is organized as follows: Section 2 presents models of the active enclosed-space noise control system. Section 3 provides a parametric analysis and numerical methods that validate the analytic results. Section 4 shows how the backstepping method can derive the state feedback signal that is the nonlinear factor of the tracked loudspeaker. Section 5 contains a discussion of the control performance of the proposed algorithm. Section 6 offers conclusions with some remarks.
2. Modeling and analysis of the enclosed space
2.1 Active enclosed-space noise control system modeling
Figure 2 shows an enclosed-space ANC system with a nonlinear loudspeaker. Because of the existence of a nonlinear restoring force generated by the folding ring in the loudspeaker, the folding ring is improved, becoming a nonlinear structure composed of a vertical spring and two horizontal springs, in order to eliminate the antiresonance phenomenon caused by the folding ring itself. The external excitation acoustic pressure Schematic of an enclosed-space active noise reduction system.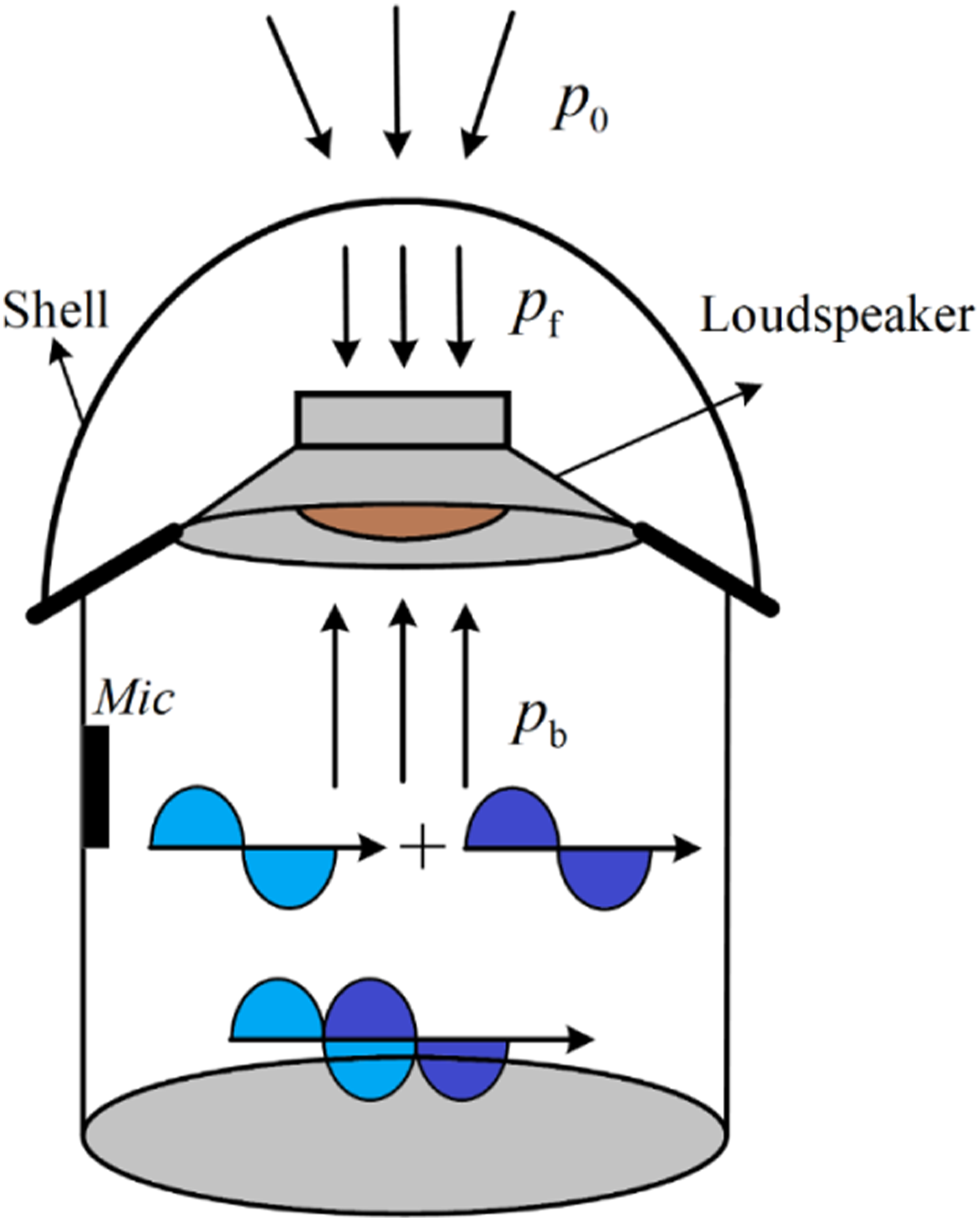

A new moving-coil loudspeaker structure is shown in Figure 3. The input signal generates an electric current in the loudspeaker coil. In the magnetic field induced by the ring magnet, the energized coil is subjected to amperage force and thus caused to move. Different than a general loudspeaker, this novel design can not only provide a nonlinear restoring force and restrain the resonant peak of the system from affecting the control performance, but also make the closed noise reduction system have a lower dynamic stiffness. Figure 3 shows a noise reduction loudspeaker with a three-spring structure and a linear damping coefficient. The force-deflection relationship of the three-spring structure is given by Wang et al. (2012): Section of the nonlinear loudspeaker with three springs.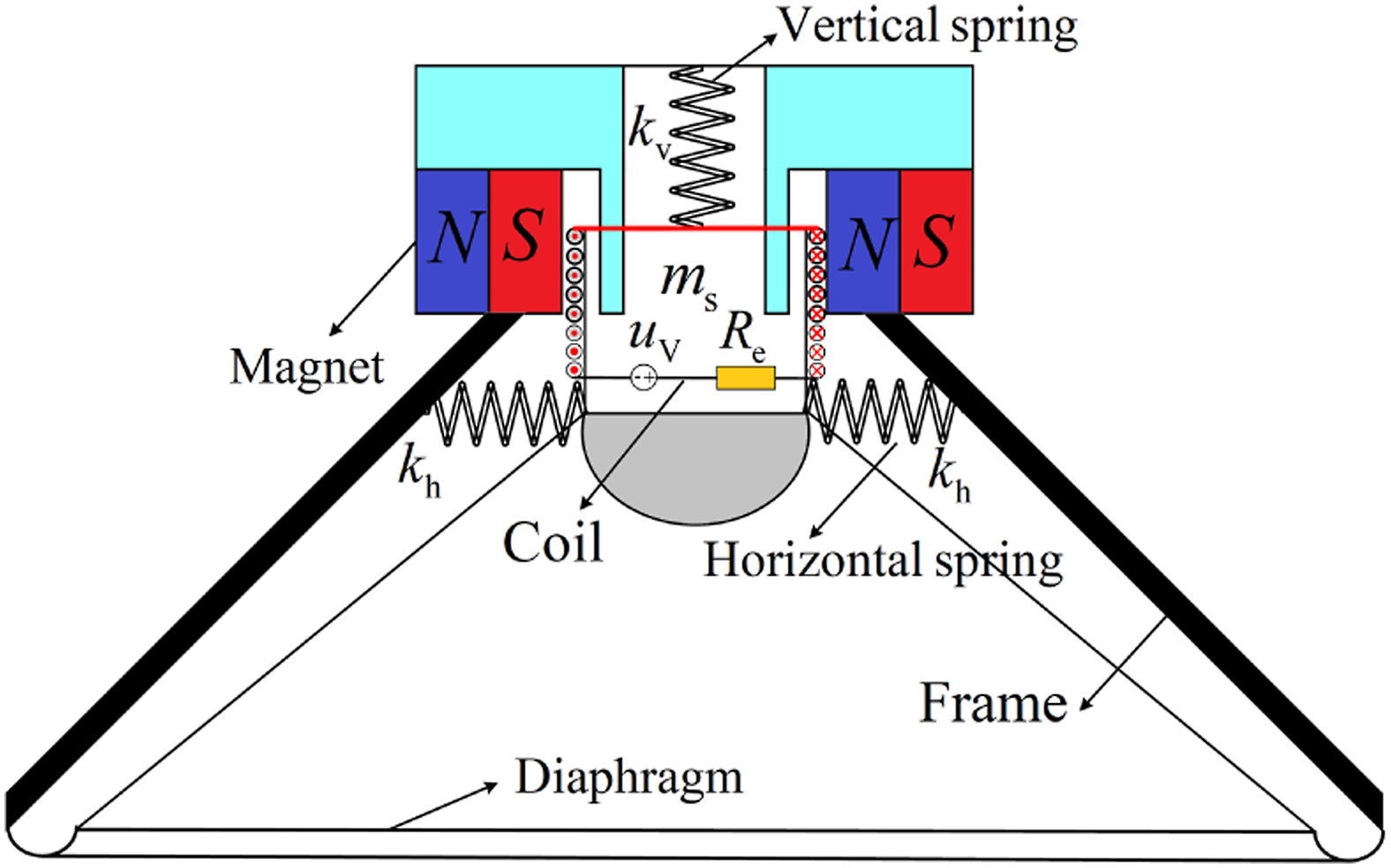

The vertical spring acts as suspension support, supporting the mass of the loudspeaker and the cone. The horizontal springs act a corrector, offsetting the total dynamical stiffness. In equation (2),


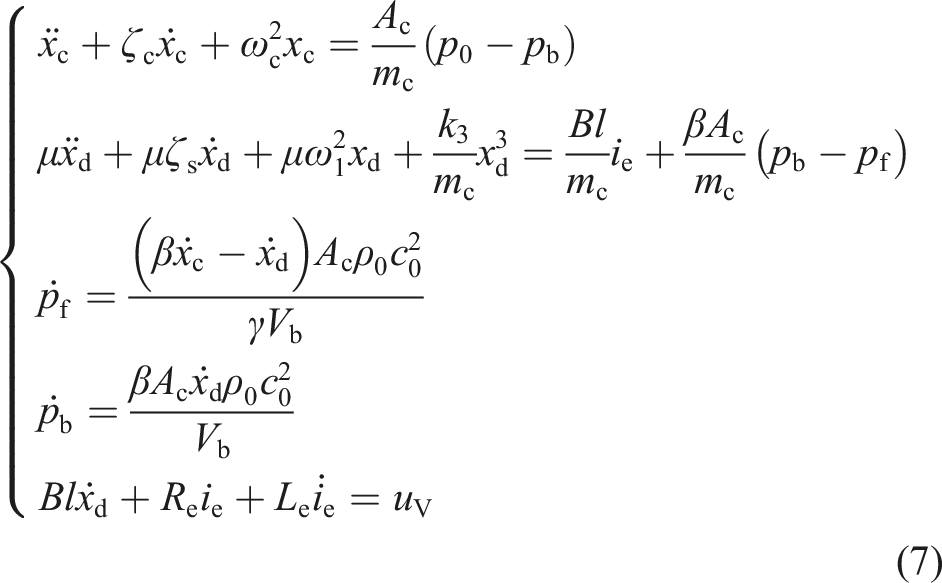
The time derivative of the pressure at the front of the system is given by

Its time derivative at the back of the system is given separately by (Liu and Li, 2020)

2.2. Structural nonlinear analysis
The amplitude-frequency response of the ANC system can be found by the generalized harmonic balance method (HBM). A series of algebraic equations consisting of harmonic balance coefficients can also be obtained and the amplitude–frequency response of the control system can be found using the arc-length continuum method. The generalized displacements of the shell and of the diaphragm, and the acoustic pressure of the inner and outer cavities, can be expanded into the Fourier series as follows:





where




The generalized velocity of the acoustic pressure of the inner and outer cavities, respectively


The generalized velocity of the current in the coil is

Figure 4 compares the amplitude–frequency responses of the acoustic pressure for the approximate analytic solutions using HBM and the numerical solutions using the fourth-order Runge–Kutta method. The two results are consistent with each other, supporting the conclusion that both the analytic and numerical solutions of the amplitude–frequency response are accurate and reliable. The frequency response curve of the nonlinear loudspeaker bends to lower frequencies in the frequency range near the resonant frequency when the system has hardening nonlinearity. The figure shows clearly that multiple values occur at around 350 rad/s and unstable solutions occur at around 798 rad/s. Comparison of the amplitude–frequency responses of the acoustic pressure in the inner cavity obtained by the approximate analytical results using HBM and numerically using the Runge–Kutta method. Solid black line: stable analytic solution. Red dotted line: unstable analytic solution. Blue circles: forward numerical solution. Light blue triangles: backward numerical solution.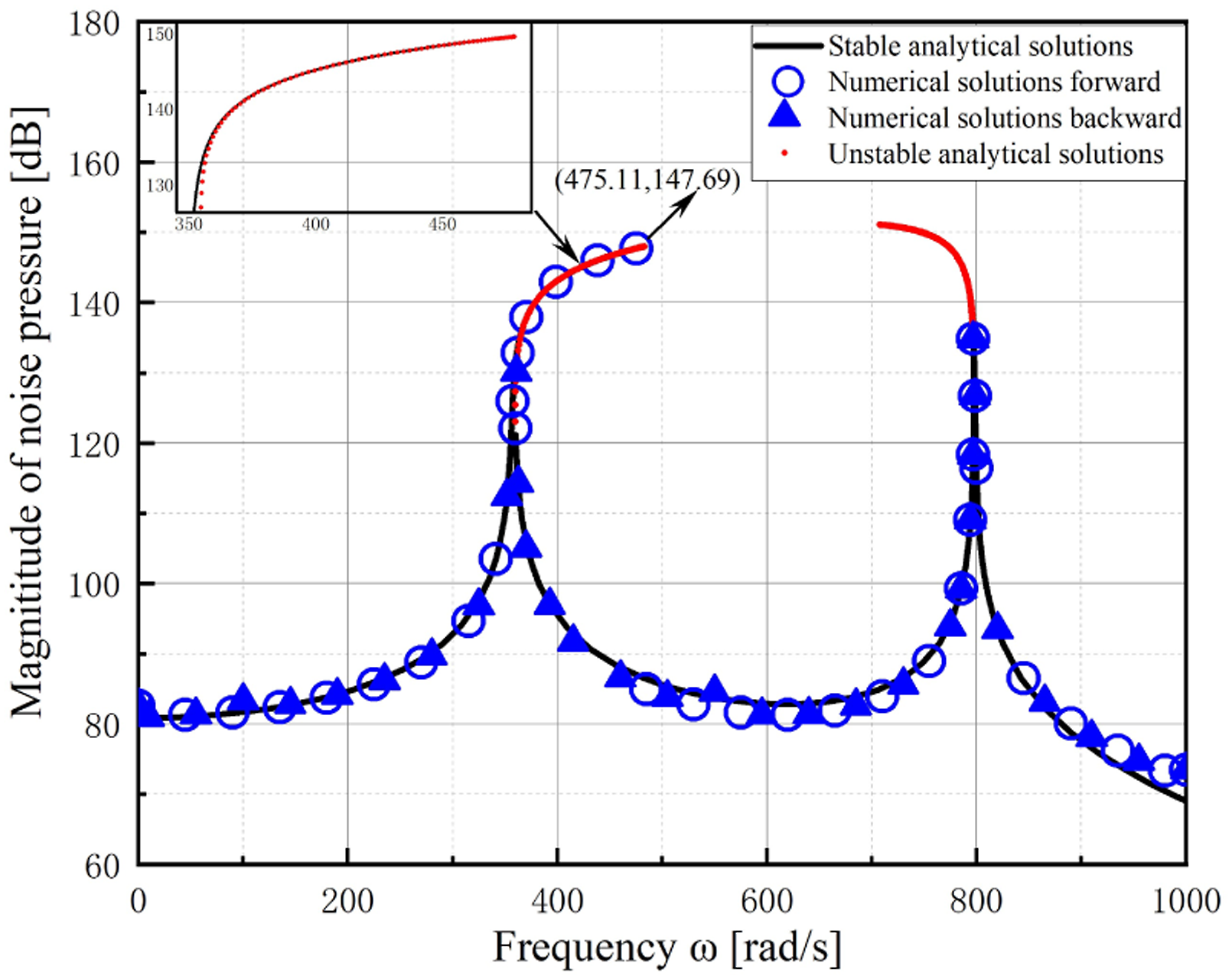
2.3. Parameter analysis
This section explores the effect of different parameters on the nonlinear loudspeaker, especially analyzing the horizontal spring in terms of extension and compression. The amplitude–frequency responses of the ANC system without feedback under various different parameters are shown in Figures 5–7. Effect of different spring length ratios on system noise reduction, for the volume ratio of front and rear chambers fixed at 0.05 and the enclosure and diaphragm area ratio fixed at 0.83. (a) Amplitude–frequency response curves of horizontal springs in compression. Blue solid line: ε = 0.80. Red dashed line: ε = 0.85. Black dotted line: ε = 0.90. Gray solid line: the linear case. (b) Amplitude–frequency response curves of horizontal springs in tension. Blue solid line: ε = 1.15. Red dashed line: ε = 1.25. Black dotted line: ε = 1.35. Gray solid line: the linear case. Effect of different volume and area ratios on noise reduction for the spring in extension, with the extension ratio fixed at 1.25. (a) Amplitude–frequency responses at different volume ratios. Blue solid line: γ = 0.10. Red dashed line: γ = 0.05. Black dotted line: γ = 0.025. Gray solid line: the linear case. (b) Amplitude–frequency responses for different area ratios. Blue solid line: β = 0.83. Red dashed line: β = 0.75. Black dotted line: β = 0.50. Gray solid line: the linear case. Effects of different spring original lengths and mass ratios on noise reduction with a fixed extension ratio of 1.15. (a) Amplitude–frequency responses at different spring ratios. Blue solid line: l0 = 0.04. Red dashed line: l0 = 0.03. Black dashed line: l0 = 0.02. Gray solid line: the linear case. (b) Amplitude–frequency responses at different mass ratios. Blue solid line: μ = 0.233. Red dashed line: μ = 0.267. Black dashed line: μ = 0.30. Gray solid line: the linear case.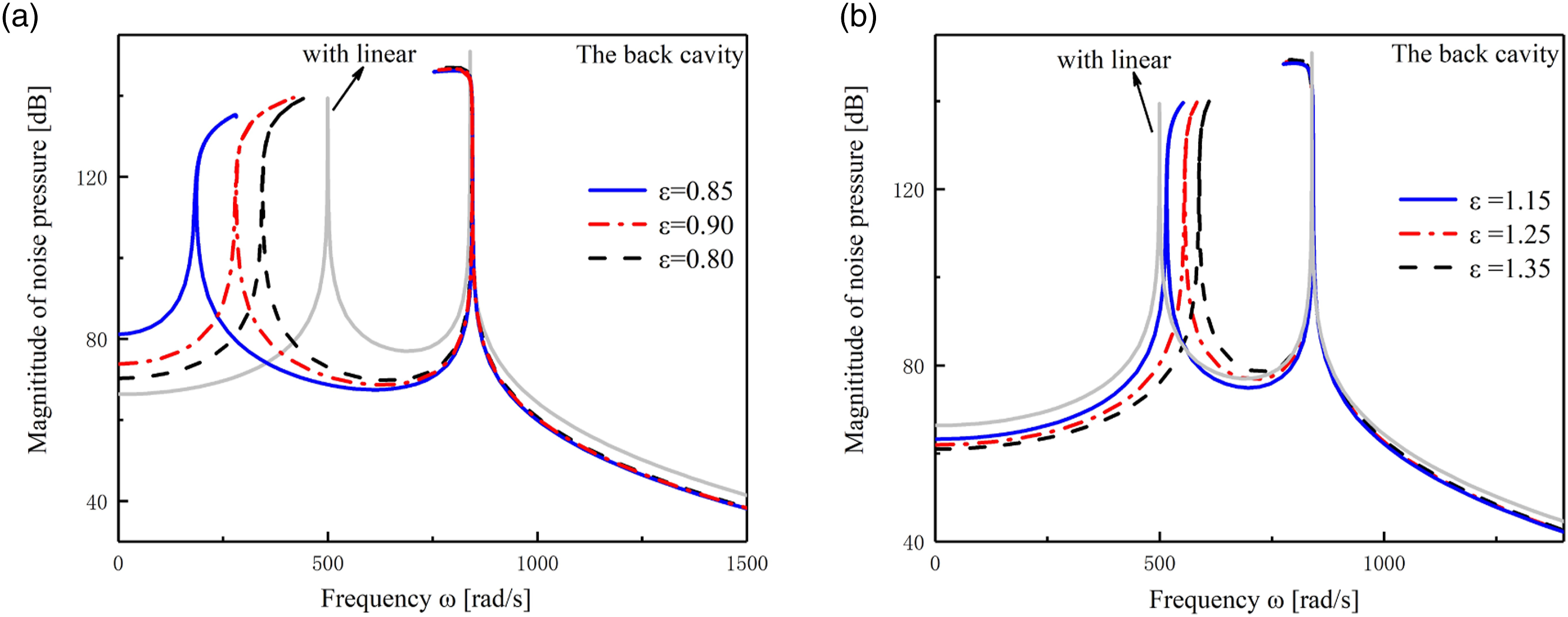
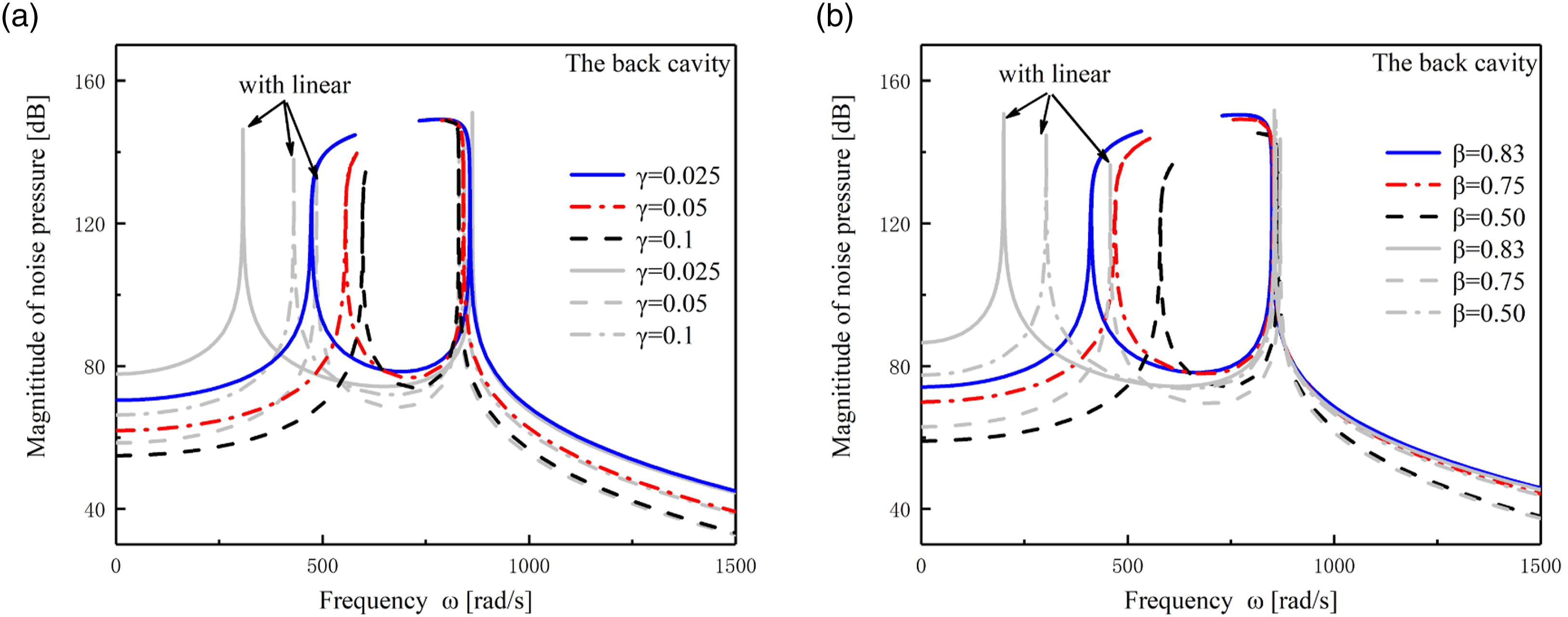
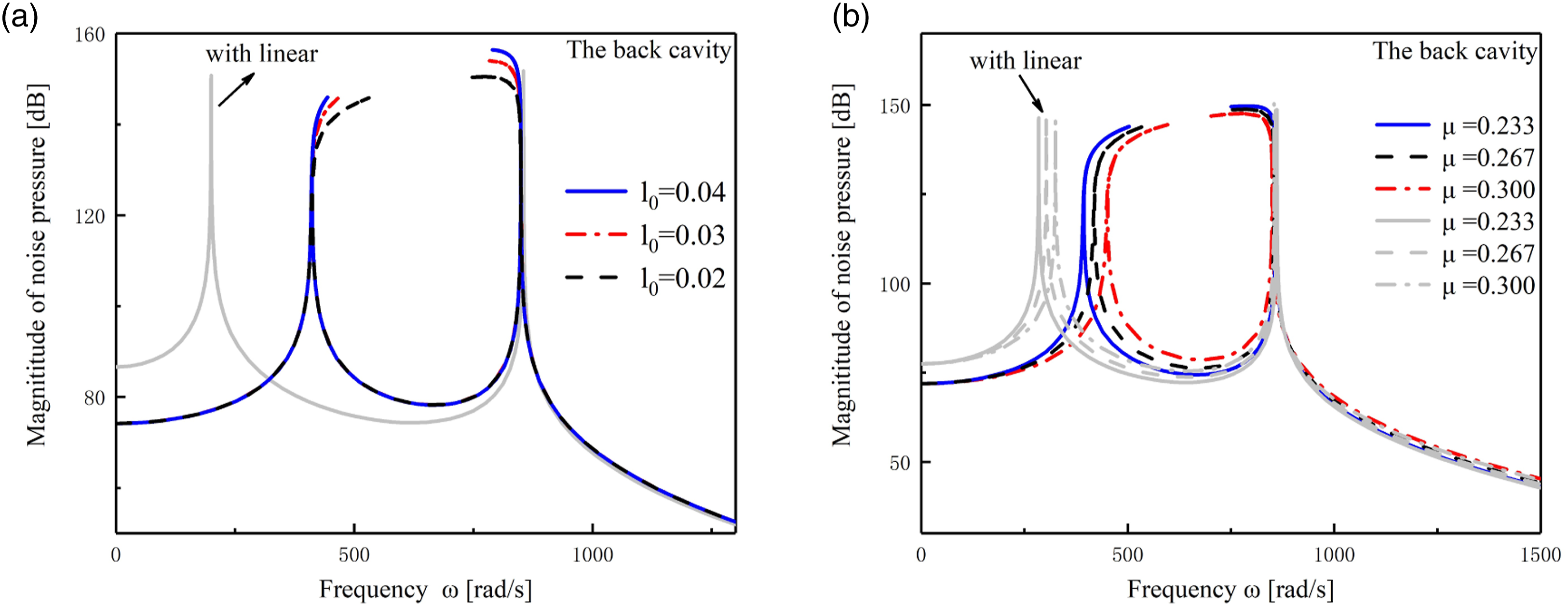
Figure 5 shows the amplitude–frequency response curves of the horizontal spring in both compression and extension. When the compression ratio is increased, the nonlinear resonance peak shifts to higher frequencies without significant change in amplitude, but the noise reduction is worse than that of the linear system. When the extension ratio is increased, the nonlinear resonance peak also shifts to higher frequencies and the noise reduction is significantly improved over that of the linear system. Therefore, the noise reduction of the system at the fundamental frequency is significant when the horizontal spring is properly extended. Figure 6 shows the amplitude–frequency response curves for different volume ratios of the front and rear cavities and the effective area ratios of the shell and diaphragm with the spring in the extension condition. As the volume ratio of the front and rear cavities increases, the resonance peak shifts to higher frequencies and the noise amplitude of the inner cavity gradually decreases. When the area ratio of the front and rear cavities is decreased, the resonance peak shifts to higher frequencies and the noise amplitude of the inner cavity gradually decreases. In addition, for the same parameters, it is evident that the noise amplitude of the nonlinear system is smaller than that of the linear system. Figure 7 shows the amplitude–frequency response curves for different initial lengths of the horizontal spring and different effective mass ratios of the shell and diaphragm with the spring in tension. As the initial length of the horizontal spring decreases, the resonant peak does not shift to higher or lower frequencies, but bends significantly to the right. It is worth noting that a change in the length of the horizontal spring cannot affect the shift of the resonant peak. When the effective mass ratio of the shell and diaphragm of the front and rear cavities is increased, the resonant peak shifts to higher frequencies, and shows stronger nonlinearity with some increase in amplitude.
2.3. State feedback study
By introducing a new control variable at the equilibrium point, a solvable target control system can be found. The design of the actual control quantity is given by

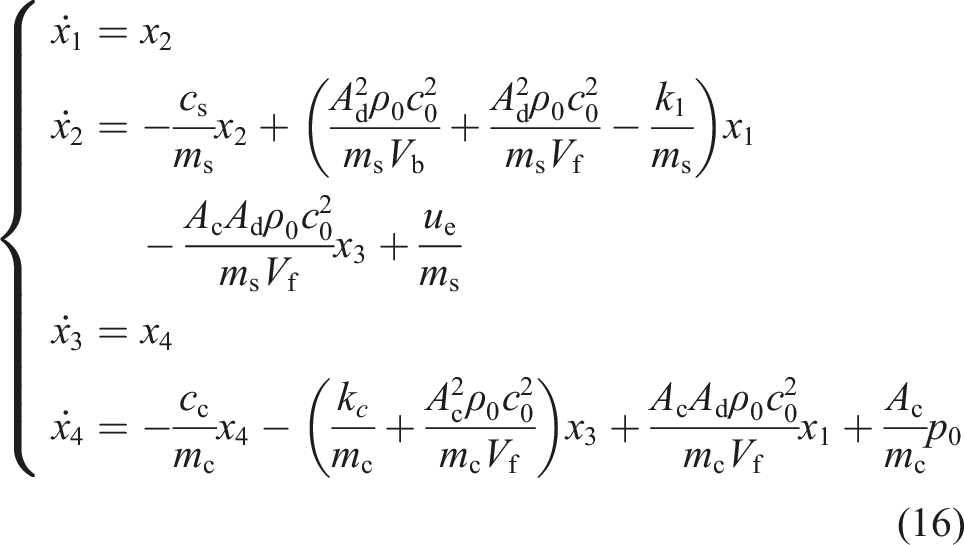
Substituting equation (8) into equation (3), the second-order differential equation for the diaphragm after linearization of the system feedback is found to be

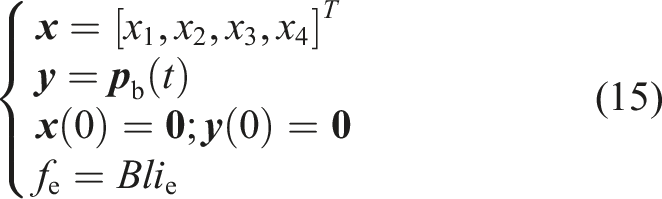
The displacement of the system can be written in the form of a spatial state vector as follows:

Assuming that the initial displacement of the system is zero and the initial output of the system is also zero, the initial conditions of the system and the active control of the input electromagnetic force are as follows:
Differentiating equation (10) with respect to time yields the following:
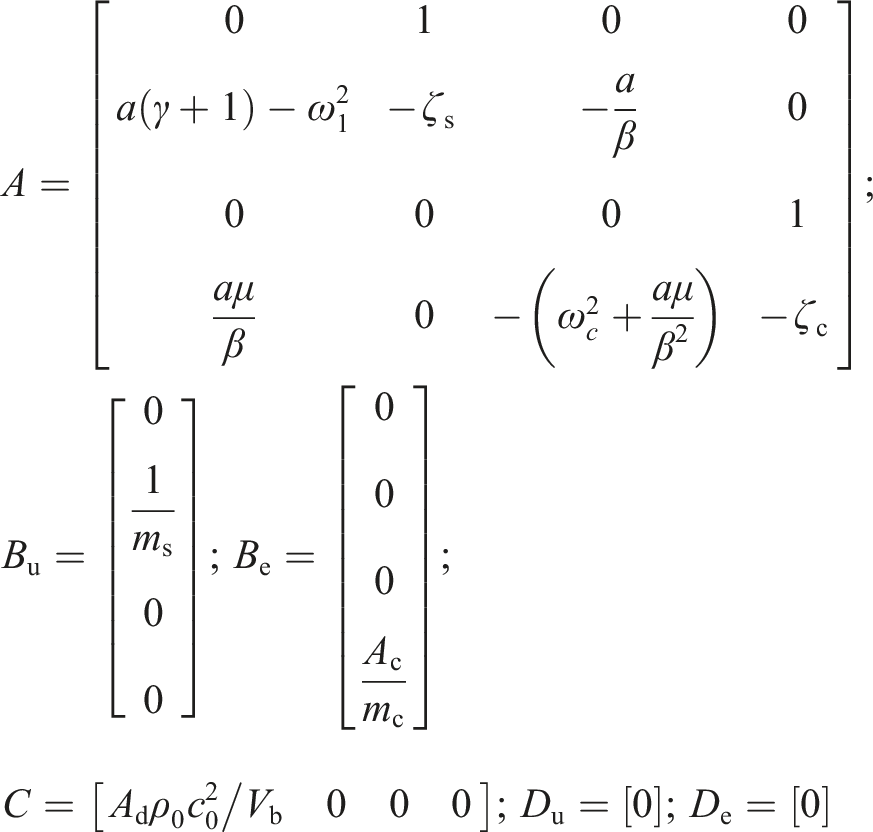
Equation (12) can be expressed as an equation of state in the following form:

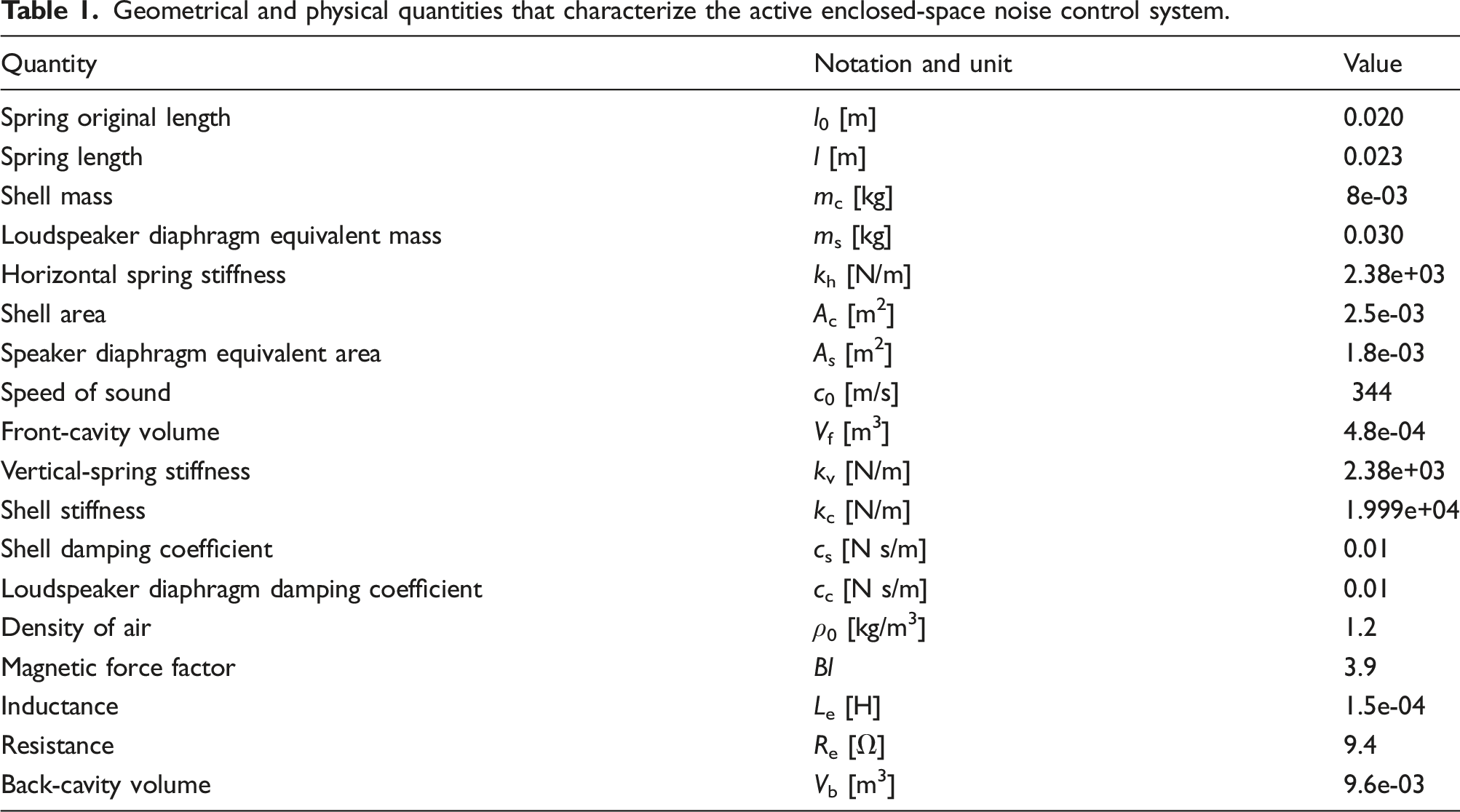
Geometrical and physical quantities that characterize the active enclosed-space noise control system.
3. Robust linear matrix inequality control
Assuming that the state vectors in the above linear time-invariant system can be measured directly, robust state feedback loudspeakers are designed to minimize the system gain 
Once H∞ of the transfer function matrix is determined, the closed-loop system is globally consistent and asymptotically stable when the system gain 
Based on Lyapunov’s second stability theory (Pilehvar et al., 2020), and once the parametrization H∞ of the system has been determined, a positive definite matrix 
Equation (13) can be rewritten


Based on Schur’s complement theory (Lu et al., 2018), the following inequality can be written:

The above inequality can be transformed into the following constraint:
This equation can be written as 
This subsection gives the suboptimal solution of the robust linear matrix inequality by mining the H
∞
norm of λ at the equilibrium point after linearization. Since an analytic solution of the robust control for the system is not available, a static state feedback actuator is designed. Robust control theory can also be applied to find a feasible solution of this linear matrix inequality. In practical applications, the above constraint is determined by the system parameters as well as by the external excitation noise. In this way, the feedback matrix
4. Nonlinear design by backstepping
As an important method of the nonlinear control theory for backstepping (Ma and Chen, 2021), a complex nonlinear system is decomposed into subsystems not exceeding in number the order of the system. Then partial Lyapunov functions and intermediate virtual control quantities can be designed for each subsystem, with continued integration allowing for the completion of the design of the whole control law. Based on the feedback matrix K obtained in the previous section and the suboptimal control electromagnetic force, the backstepping method can be used to design an active control input voltage signal ue to track the electromagnetic force ue* so that its equilibrium point is fixed at the 0 vector (i.e., the origin). The signal error of control variable 
The first-order derivatives of the active control force and the suboptimal control force are

The new Lyapunov function of the control system is obtained as follows:
It is clear that the new Lyapunov function is globally positive definite. Substituting equations (18), (24), (25), and (26) into equation (27), the time derivative of the new Lyapunov function is obtained by:








From here, we can get the expression of output voltage uV of the system:
Substituting equation (30) into the time derivative of the new Lyapunov function gives
For 


From equation (33) we find that the new Lyapunov function is globally consistent and asymptotically stable outside a compact set when 
In this section, we have obtained the input voltage and the H∞ norm of the whole system by the backstepping method for the active confinement noise reduction model with a nonlinear loudspeaker.
5. Results and discussion
In this section, two cases of theoretical noise reduction performance of the active enclosed-space noise control system are discussed. Numerical simulations via 4th Runge-kutta scheme were used to verify the noise reduction capability of the discrete system (Luo et al., 2021; Wang et al., 2018). The effect of the ANC is shown in the time and frequency domains in Figure 8. The resonance peaks are located near 420 rad/s and 858 rad/s (the natural frequencies of the active enclosed-space noise control system), which are the displacements, respectively, of the shell and the loudspeaker diaphragm. The resonance peak near 858 rad/s is due to the single-frequency noise input. In order to optimize the control performance of the whole system, the H∞ criterion of the whole system is limited to a certain range of variation. It could be seen from the inequality of equation (33) that the voltage amplitude can be limited to 10 V with ℓ = 30. The first derivative of the new Lyapunov function obtained by the backstepping method is negative definite. The robustness of the overall control system is verified by taking appropriate values to satisfy the inequality of equation (34), which equals the arithmetic square root of λ2 and ‖ Comparison of noise reduction in the time domain for the initial system and the suboptimal system using the LMI-BS algorithm at a single noise frequency of 170 Hz. (a) Frequency domain analysis. Red solid line: pre-controlled results with the linear loudspeaker. Blue dotted line: pre-controlled results with the nonlinear loudspeaker. Red dash-dot line: controlled results with linear loudspeaker. Blue dashed line: controlled results with the nonlinear loudspeaker, (b) Time domain analysis. Blue solid line: primary noise. Red solid line: controlled results.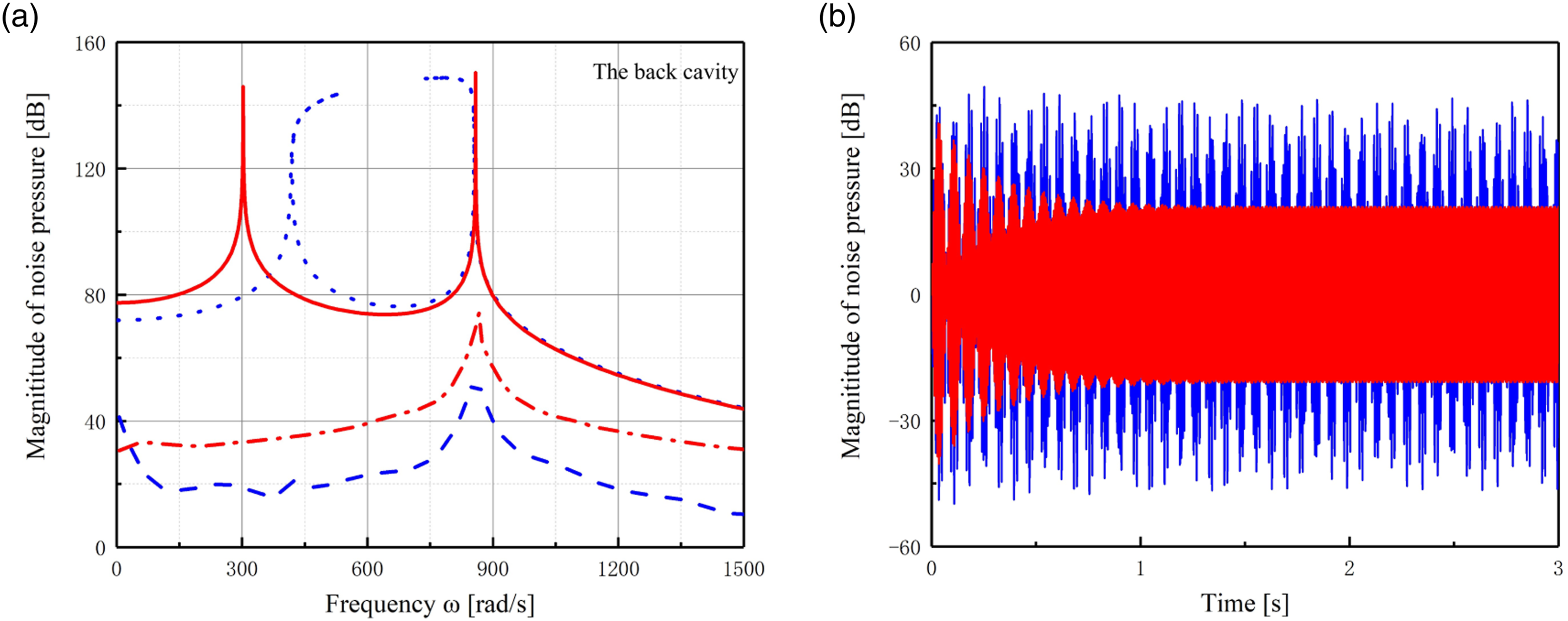
Noise reductions at different frequencies.

Recently, it has been common to evaluate nonlinear controller characteristics using response harmonics at multi-frequency inputs. The performance of this noise reduction system could be tested with harmonic noise inputs of 150-Hz, 200-Hz, and 300-Hz components and random noise as examples. The amplitude of the random excitation simulated in Matlab software is much smaller than the external excitation at other frequencies. The reason for this is that the nonlinear loudspeaker may be prone to exhibit intermodulation distortion at large excitations, thus causing the controller to malfunction. The controlled results are shown in Figures 9 and 10 Comparison of frequency response functions of the noise pressure for the uncontrolled and controlled system under multi-frequency and random noise excitation. Blue solid line: primary noise. Red solid line: noise pressure in the cavity for the controlled system. Comparison of the noise pressure in the time domain for the primary noise and the controlled noise using the algorithm for multi-frequency and random noise excitation.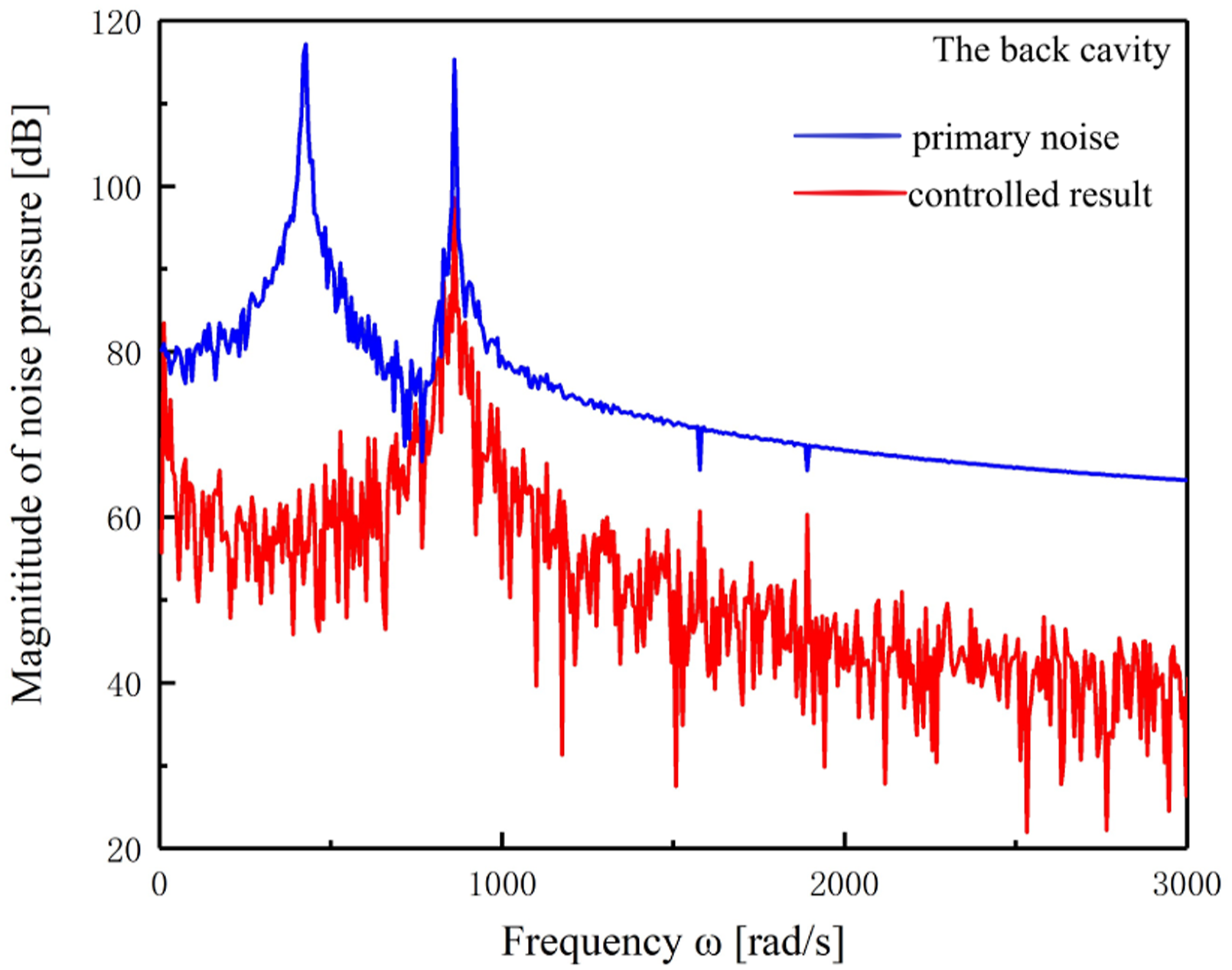
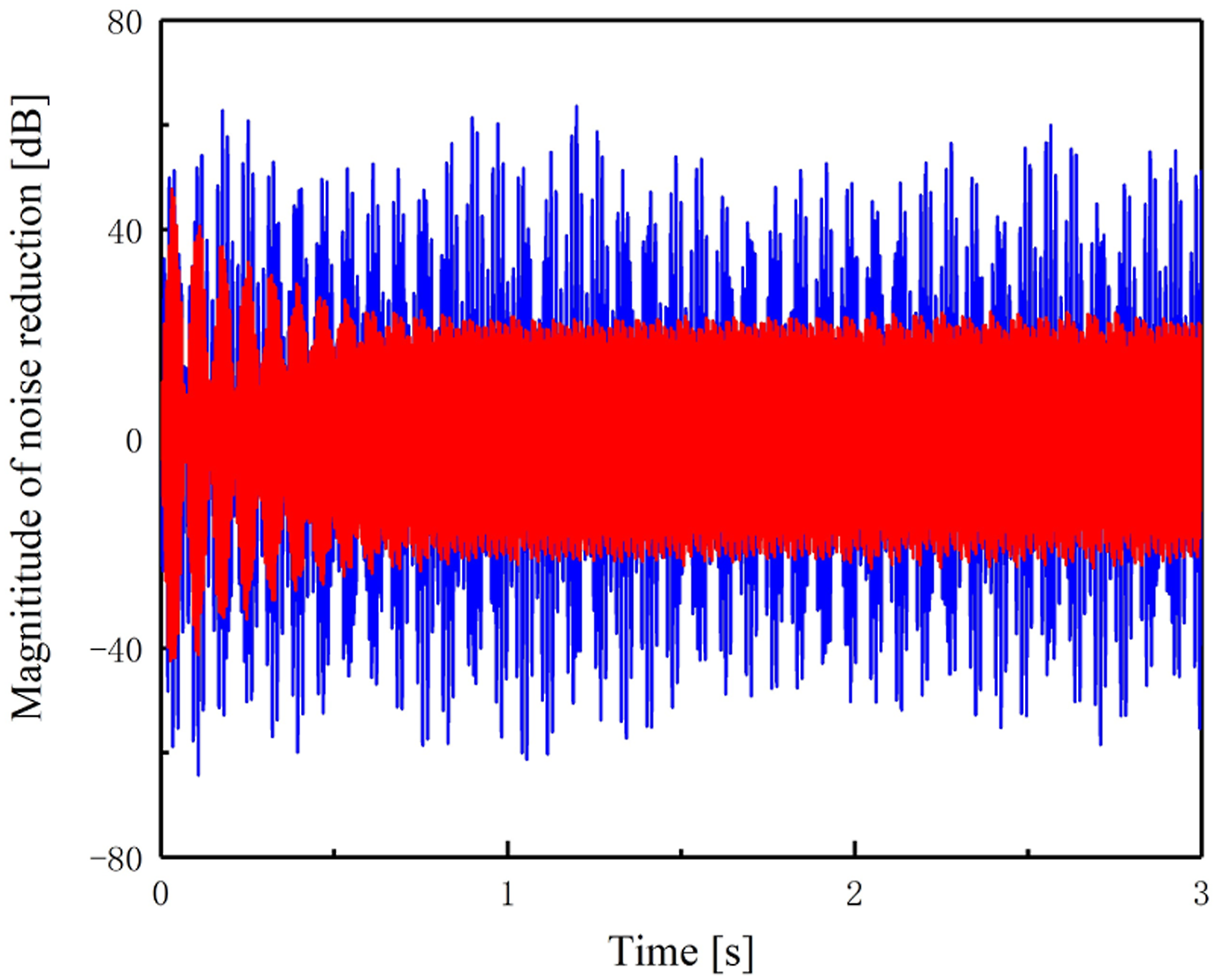
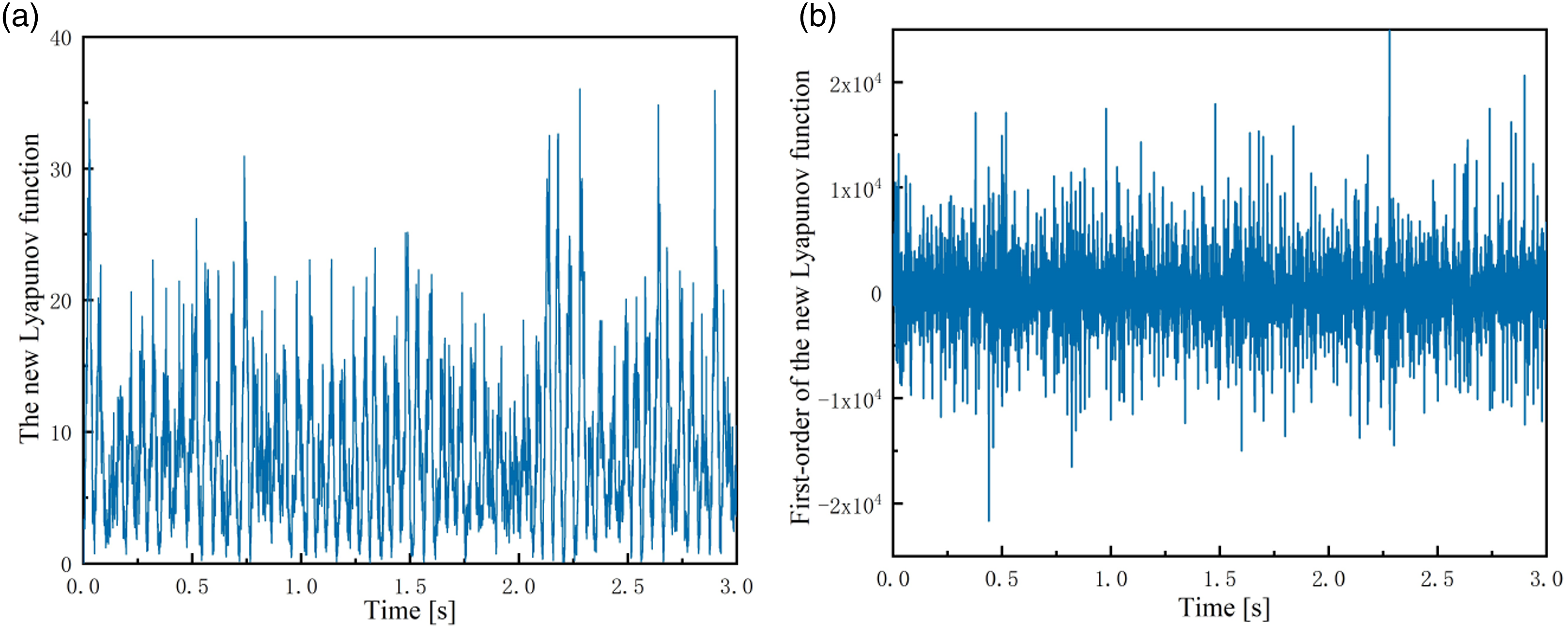
Figure 11 gives the input voltage and input current of the loudspeaker under multi-frequency as well as random noise excitation. It can be seen that the system input amplitudes are less than their maximum values uVmax and iemax. Consequently, the power limit is also guaranteed for nonlinear speaker systems. Figure 12 shows that the new Lyapunov function of the overall system is positive definite globally, and its time derivative is oscillatory. It can be concluded from equations (32) and (33) that the derivative V(x) corresponding to the new Lyapunov function is positive only within a finite set. When the first-order derivative of V(x) is positive, the noise y at the measurement location can increase. As the noise y increases, the first-order derivative of V(x) can gradually become smaller and eventually become negative, which in turn could lead to a decrease in the noise y at the measurement location. The above process could be repeated and could eventually reach a steady state. Therefore, the noise signal y is a globally bounded function over a large range. Input voltage and current signals for controlling external excitation noise. (a) Active control input voltage. (b) Active control input current. Time domain analysis of the Lyapunov function. (a) The new Lyapunov function. (b) The first time derivative of the new Lyapunov function.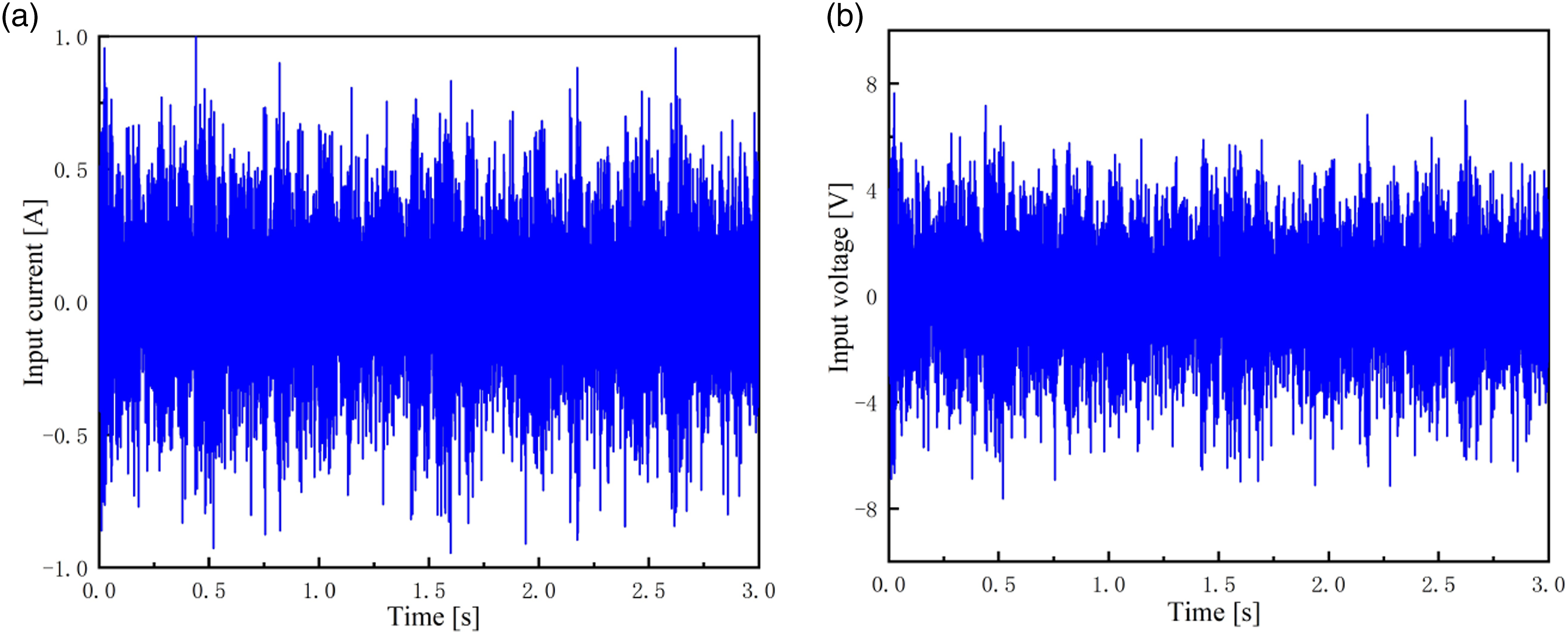
6. Conclusions
In the work reported here, mathematical modeling of an active enclosed-space noise reduction system with a nonlinear loudspeaker has been implemented and the corresponding noise reduction performance has been analyzed. The approximate frequency response function of the enclosed-space noise reduction system was obtained using the HBM and verified by numerical methods. In addition, a robust state feedback loudspeaker designed with a linear matrix inequality with input constraints was used as a control. Simultaneously the backstepping method was applied to track the system’s status feedback signal. The results demonstrate that the latest Lyapunov function of the system was achieved in a globally consistent and bounded manner. Some additional detailed findings are the following: (1) For the same area ratio, volume ratio, and mass ratio, the closed space noise reduction system with a nonlinear loudspeaker is superior to the traditional linear noise reduction system. (2) Compared with the traditional linear system, the enclosed-space noise reduction system with a nonlinear loudspeaker improves the low-power characteristics of the system. In addition, the new structure incorporates nonlinear restoring forces in the system to give the speaker a lower dynamic stiffness, allowing the system to work better under high-frequency noise excitation. (3) The system has excellent noise reduction performance under single-frequency, multi-frequency, and random noise excitation.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was funded by the National Natural Science Foundation of China (Grant Nos. 11872037, 11872159, and 11572182) and the Innovation Program of Shanghai Municipal Education Commission (Grant No. 2017-01-07-00-09-E00019).
Data availability
The data used to support the findings of this study are available from the corresponding author upon request.