
Abstract
This paper aims to reach high-quality attitude control and large-amplitude slosh suppression when a typical liquid-filled spacecraft executes three-axial large-angle maneuvers, by applying a wave-based attitude controller (WBAC). First, the sloshing dynamics is modeled by using a spherical pendulum, whose motion is expressed by splitting its coordinates. Thus, the large-amplitude lateral sloshing and the rotary sloshing as well as the over-all rigid motion of a liquid with respect to the tank in spacecraft can be approximately described. Second, the dynamics equations of system in terms of hybrid coordinate for the liquid-filled spacecraft are derived via the Lagrangian formulation. Third, an improved WBAC for three-axial large-angle maneuvers of in-orbit liquid-filled spacecraft is designed by adding a derivative control law and a gravity-gradient-torque compensation law to a wave-based control law. Simulations of three-axial large-angle maneuver demonstrate good performance of the WBAC in shortening completion time of attitude maneuvering, suppressing the jitter in the angular velocity of spacecraft, and accelerating the large-amplitude slosh suppression, simultaneously. The results indicate the potential applications of the proposed WBAC in the large-angle attitude maneuvering of liquid-filled spacecraft when there exists large-amplitude liquid slosh.
Keywords
1. Introduction
A new generation of spacecraft usually carries significant amounts of liquid propellant for long-life-span tasks, station keeping, large maneuvers, etc. Especially for three-axis-stabilized liquid-filled spacecraft, the attitude control should adapt to the requirements of high stability and high precision. However, the liquid in the propellant tanks tends to experience nonlinear sloshing motion (mainly including large-amplitude lateral sloshing, nonplanar sloshing, rotary sloshing, as well as the over-all rigid motion with respect to the tank) when the spacecraft executes large and rapid maneuvers (Dodge, 2000; Ibrahim, 2005; Liu et al., 2018, 2020). Then, the real-time evaluation of the generated slosh force and slosh torque acting on the rigid hub of spacecraft will be a very tricky problem in the engineering practice, and the disturbance of liquid slosh may cause the attitude motion of spacecraft accompanied by violent jitter (Liu et al., 2018, 2020). A famous example is the failure in the second flight of the SpaceX “Falcon-1” in 2007, and the cause was recognized as that the propellant sloshing in the liquid oxidizer tank strengthened the circular coning oscillation in the rolling motion of the rocket.
Abundant analytical, experimental, and numerical results suggest that the effect of the linear sloshing of a liquid within a specially shaped container can be accurately evaluated by an equivalent mechanical model (EMM) (Dodge, 2000; Ibrahim, 2005). The commonly used EMMs in engineering, including the mass–spring–damper model and the simple pendulum model, are mainly for describing the in-plane lateral sloshing. Moreover, a spherical pendulum model can be used to predict a liquid which experiences complicated nonplanar motion modes like out-plane lateral sloshing and/or rotary sloshing (Dodge, 2000; Kana, 1987, 1989; Liu et al., 2018; Shageer and Tao, 2008). In recent years, the large-amplitude slosh models were proposed and improved to meet with the demand of the development of spacecraft. Detailedly, a constraint-surface model has been validated to be suitable for the modeling of in-orbit large-amplitude slosh dynamics (Berry and Tegart, 1975; Zhou and Huang, 2015; Liu et al., 2020); a moving pulsating ball model was proposed by Vreeburg (1997), and its practicability has been validated by the in-orbit flight tests of the “Slohsat FLEVO” satellite; a 3DOF-rigid-pendulum model was proposed, on the base of the spherical pendulum model, to investigate more comprehensive nonlinear motion modes of a liquid in spherical propellant tanks (Liu et al., 2019). In recent years, some new numerical computation methods for large-amplitude liquid slosh, being important techniques for the validation of nonlinear EMMs, also have achieved great progress (Huang et al., 2018; Nguyen-Thanh et al., 2019; Tang and Yue, 2017).
The design of the real-time attitude control of liquid-filled spacecraft is almost based on the coupled dynamics equations of spacecraft, which incorporates the liquid sloshing dynamics by using an EMM. Shageer and Tao (2007) gave an overview of the pendulum analogy for fuel sloshing dynamics and developed an adaptive pole placement controller of liquid-filled spacecraft to asymptotically track the desired output. Yue and Zhu (2014) used dynamic inversion and input shaping techniques to design a hybrid controller for the reference tracking maneuvers of spacecraft with fuel slosh, and this hybrid control scheme was demonstrated to be a satisfactory solution of not only to implement the maneuver task but also to suppress the liquid fuel sloshing. Feddema et al. (1997) applied input shaping to suppress the liquid sloshing in a moving hemispherical container, and experiments found that a simple pendulum model is accurate for describing the motion of a liquid in hemispherical containers and that the rapid rotation of a container can induce an unexpected out-of-plane oscillation of liquid. Song and Lu (2019) derived the attitude dynamics of a rigid spacecraft with a partially fuel-filled elliptic tank by using an equivalent two-mode spring–mass model for small-amplitude lateral sloshing and designed an adaptive sliding mode control law with multiple mode input shapers to suppress the fuel sloshing. Thomas et al. (2010) derived a feedback control strategy via the Lyapunov theory for the reorientation of liquid-filled spacecraft, but the angular velocity jitter aroused by the fuel sloshing disturbance and the control efforts can’t be suppressed. However, the control system of three-axis-stabilized spacecraft usually requires attitude maneuvers with high imaging performance, resistance to disturbance, and low jitter. The wave-based control technique was first introduced for position control and vibration suppression of flexible robot arms, by O’Connor and Lang (1998) at the end of the last century. A practical advantage of wave-based control is that all measuring is done inside the control system, and the measurement of the liquid sloshing states is not necessary. Thompson and O’Connor (2016) designed a wave-based controller for in-plane small-angle attitude maneuver of an upper stage accelerating rocket with small-amplitude slosh in a single tank. Colagrossi and Lavagna (2021) improved a three-dimensional real-time MIMO wave-based controller for flexible spacecraft with liquid sloshing replaced by mass–spring–damper slosh model. The above works all consider the control of liquid-filled dynamics system by using small-amplitude slosh models; however, further research is demanded on the three-dimensional attitude control of liquid-filled spacecraft when the liquid is expected to experience more complicated motion such as large-amplitude nonplanar lateral sloshing and rotary sloshing.
The previous work in the literature (Liu et al., 2019) proposed a 3DOF-rigid-pendulum model for describing more comprehensive nonlinear motion of a liquid in spherical propellant tanks, and the nonlinearities of liquid sloshing can be found by studying the model motion. Another previous work in the literature (Liu et al., 2018) has designed an output-feedback attitude controller (OFAC), based on the Lyapunov theory, for three-axial rest-to-rest maneuvers of spacecraft with a partially liquid-filled tank and two flexible solar panels. This kind of controller is capable of suppressing the jitter effect of flex and slosh on the attitude motion of spacecraft; however, the control–structure–slosh interaction problem is likely to be more prominent. Thus, more effective control methods for liquid-filled spacecraft with large-amplitude slosh need to be studied in future research.
In this paper, the large-amplitude lateral sloshing, the nonplanar sloshing, the rotary sloshing, as well as the over-all rigid motion of a liquid in spacecraft are considered by using the composite spherical pendulum model, and the coordinates of the spherical pendulum are split into two parts, one for describing the over-all rigid motion of liquid with respect to the tank, and the other one for describing the sloshing motion of liquid around the dynamic equilibrium position. Then, the rigid-liquid-control coupled dynamics equations are derived via the Lagrangian formulation. Finally, an improved wave-based attitude controller (WBAC) for three-axial large-angle maneuvers of in-orbit liquid-filled spacecraft is designed by adding a derivative control law and a gravity-gradient-torque compensation law to a wave-based control law. Simulations of large-angle rest-to-rest maneuver under the PD controller, the OFAC, and the WBAC are, respectively, given to illustrate the superiority of the WBAC.
2. Physical model of liquid-filled spacecraft
The liquid-filled spacecraft to be described, shown in Figure 1, consists of a rigid hub, a set of reaction wheels for attitude control, and a spherical tank which is partially filled with liquid fuel. Let Physical model of spacecraft, frames, and variables.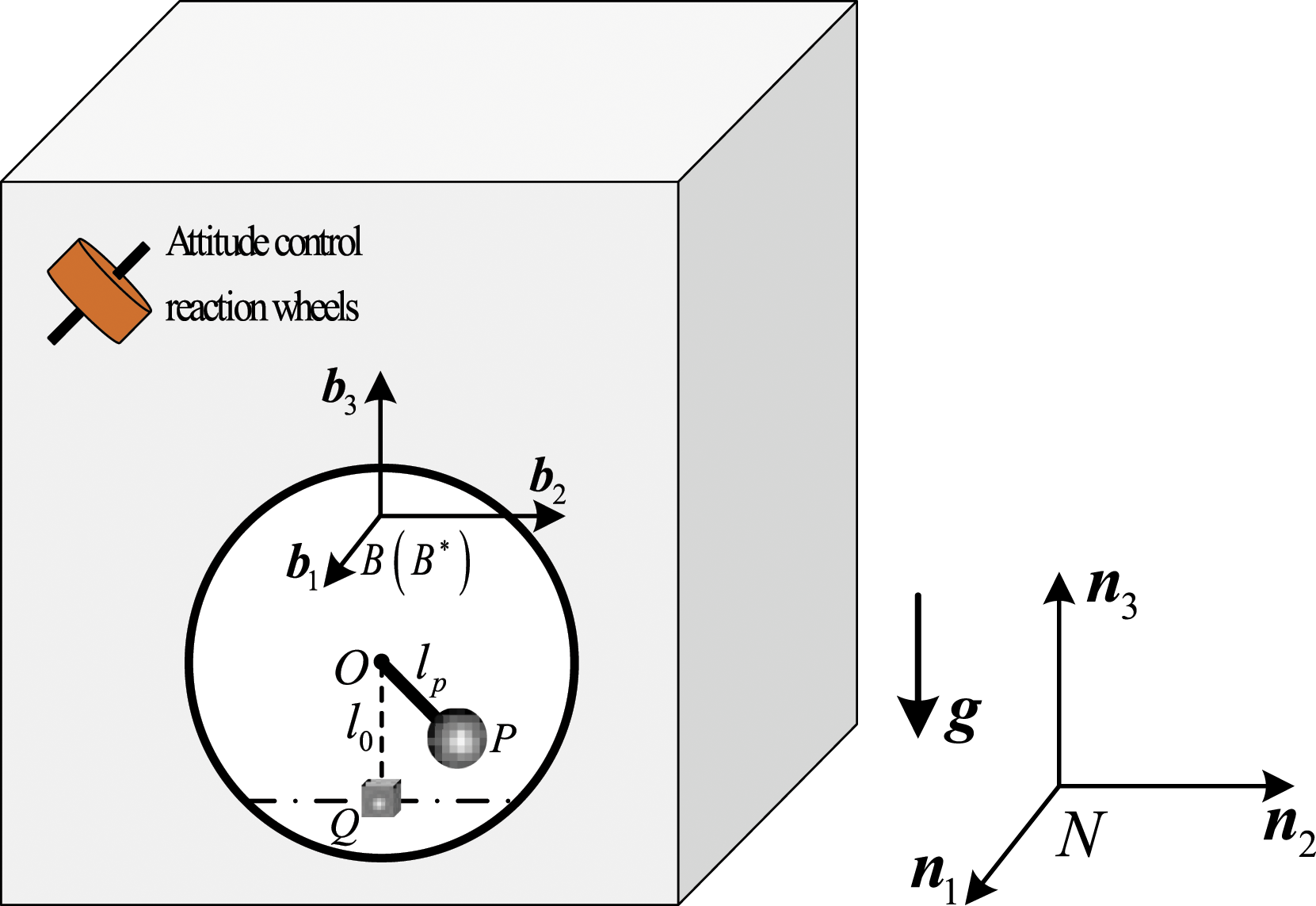
Here, the liquid fuel is approximately replaced by an EMM called the composite spherical pendulum model, which contains a lumped mass
The lumped mass
3. Attitude dynamics modeling
This work focuses on the coupling dynamics and control during the attitude maneuvering of a liquid-filled spacecraft, so the orbital translation of spacecraft is not considered. The attitude dynamics modeling of the controlled liquid-filled spacecraft system, based on the Lagrangian formulation, covers the motion description of system, the derivation of the system energy, and finally applying the Lagrangian equations.
3.1. Motion description of system
(1) Attitude motion of spacecraft
The attitude of spacecraft is described by the Euler quaternion

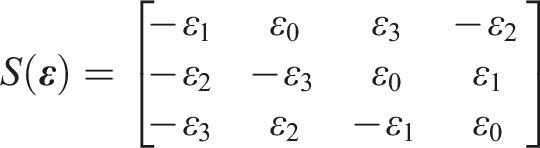
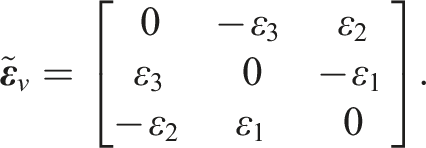
Additionally, the quaternion relates to the direction cosine matrix through the following formula (2) Motion of the slosh model

First, the position vector of the lumped mass



Then, the velocity of



3.2. Derivation of system energy
First, the kinetic energy of system, containing that of the attitude motion of the rigid hub, the spin of the reaction control wheels, and the liquid slosh, is defined by
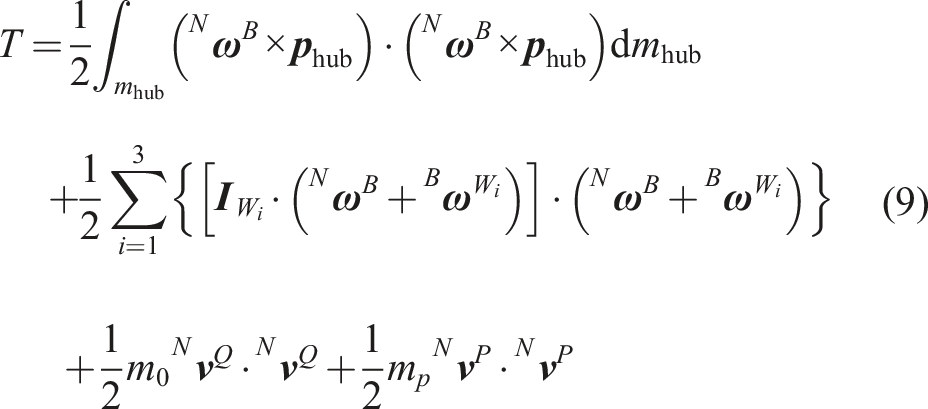
From here on, for the sake of matrix manipulation, vectors and dyadic tensors can be represented by coordinate matrices in the body-fixed frame

Second, the potential energy of system is the gravitational potential energy caused by the liquid sloshing motion, and it is given by

3.3. Lagrangian formula
The Lagrangian equations in terms of quasi-coordinates and generalized coordinates are used to derive the attitude dynamics equation and the sloshing dynamics equation (Meirovitch, 1991). The Lagrangian function of the liquid-filled spacecraft is given by

First, the Lagrangian formulation for the attitude motion of spacecraft is given as

Second, the Lagrangian formulation for the liquid sloshing motion is given as


By substituting equations (10) and (11) into equation (12), and then into equations (13) and (14), respectively, the dynamics equations of system can be formulated as


4. Control design
This paper mainly focuses on investigating the attitude control for the three-axial large-angle maneuvers of a liquid-filled spacecraft with large-amplitude slosh, aiming to improve the response performance of the attitude motion of spacecraft, as well as to enhance the active suppression of liquid slosh. Here, the wave-based control method in the literature (Thompson and O’Connor, 2016), for in-plane small-angle attitude maneuver of an upper stage accelerating rocket with small-amplitude slosh, is introduced, and an improved WBAC, which includes a wave-based control law, a derivative control law, and a gravity-gradient-torque compensation law, has been designed for three-axial large-angle maneuvers of in-orbit spacecraft with large-amplitude slosh.
In order to demonstrate the effectiveness of the WBAC, the results under a PD controller and an OFAC will be given for comparison in the following section.
4.1. Wave-based attitude controller (WBAC)
Referring to the literature (Thompson and O’Connor, 2016), a WBAC for single channel attitude control of a spacecraft with a single liquid-filled tank can be designed based on the wave model shown in Figure 2, in which the notional mass Wave model for single channel attitude control of the spacecraft.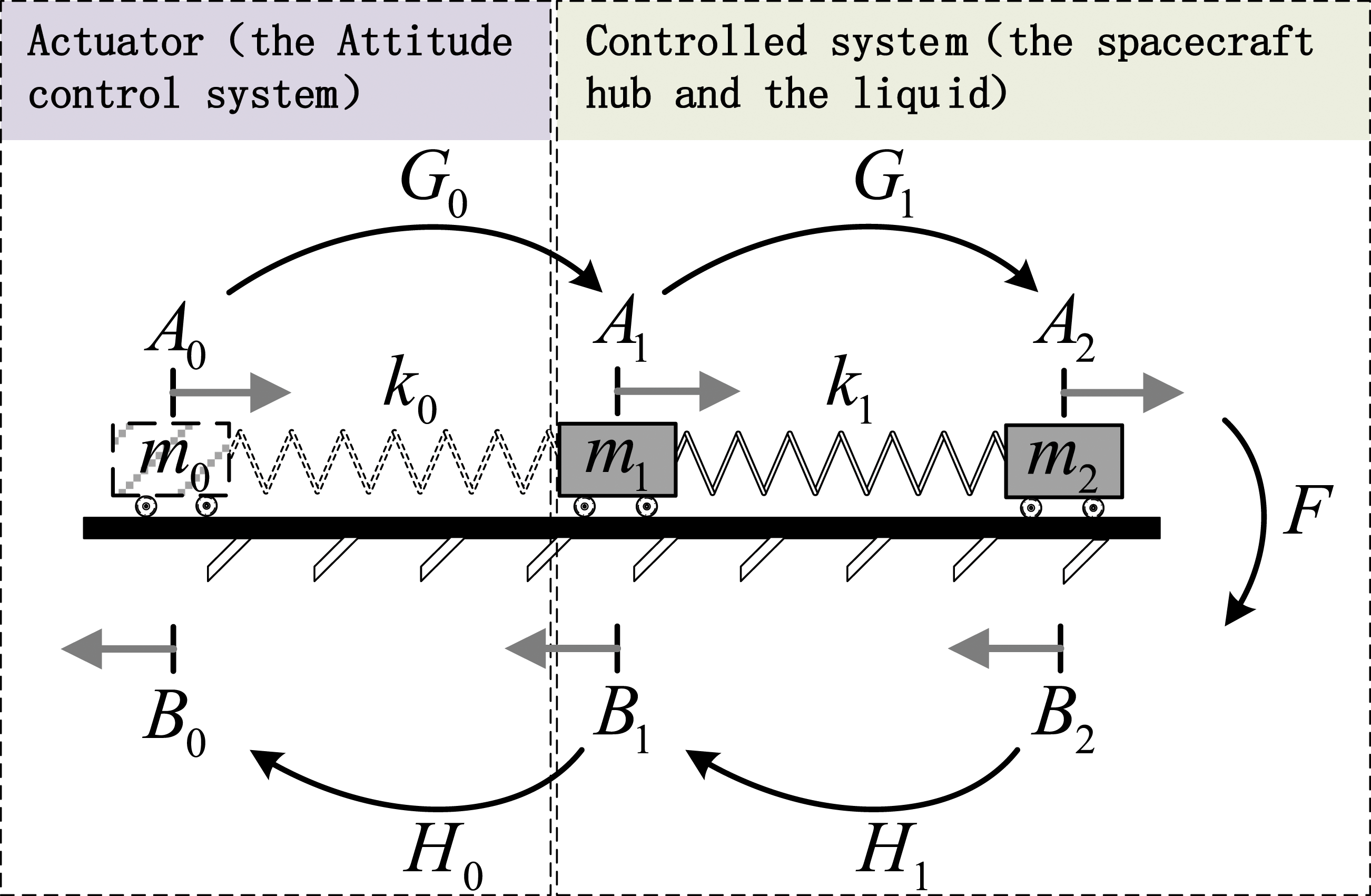


First, according to the inherent properties of the wave model, the returning wave component








Second, the wave-based control law is designed as (Thompson and O’Connor, 2016; Colagrossi and Lavagna, 2021)
Finally, an improved WBAC for the three-axial large-angle maneuvers of in-orbit liquid-filled spacecraft is designed by combining a derivative control law and a gravity-gradient-torque compensation law with the wave-based control law. Thus, the WBAC is given as (the output torque of the reaction wheels)

4.2. Output-feedback attitude controller (OFAC)
Previous work in the literature (Liu et al., 2018) has designed an OFAC for rigid-flexible-liquid spacecraft, based on the Lyapunov stability theorem. For the liquid-filled spacecraft studied here, this kind of controller (the output torque of the reaction wheels) with a state estimator is given as


4.3. PD controller
In addition, the PD controller for this spacecraft can be designed as (the output torque of the reaction wheels)

5. Numerical simulations and results
In this section, the dynamic responses during the spacecraft undergoing a large-angle rest-to-rest maneuver under different attitude controllers, including the PD controller, the OFAC, and the WBAC, are simulated.
In detail, the spacecraft is maneuvered from the initial attitude described by

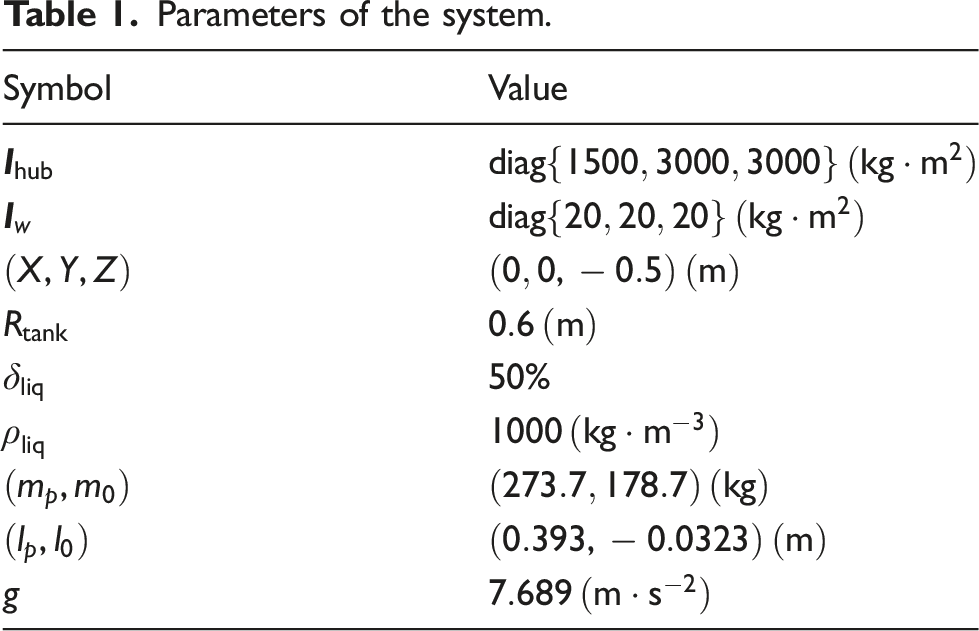
Previous works in the literatures (Liu et al., 2018, 2020) indicate that just small-amplitude liquid slosh will be aroused during the attitude maneuvering when there is no liquid slosh initially, and Tang and Yue (2017) have proved that the damping effect can be ignored for small-amplitude slosh but not for large-amplitude slosh case. Thus, the following two cases are, respectively, simulated, and the results under the three different controllers are compared here. The parameters of the spacecraft system for numerical simulations are contained in Table 1. (1) Case A: there is no initial liquid slosh, namely, (2) Case B: there is initial large-amplitude liquid slosh by setting Parameters of the system.
5.1. Results of Case A
Parameters of the controllers for Case A.

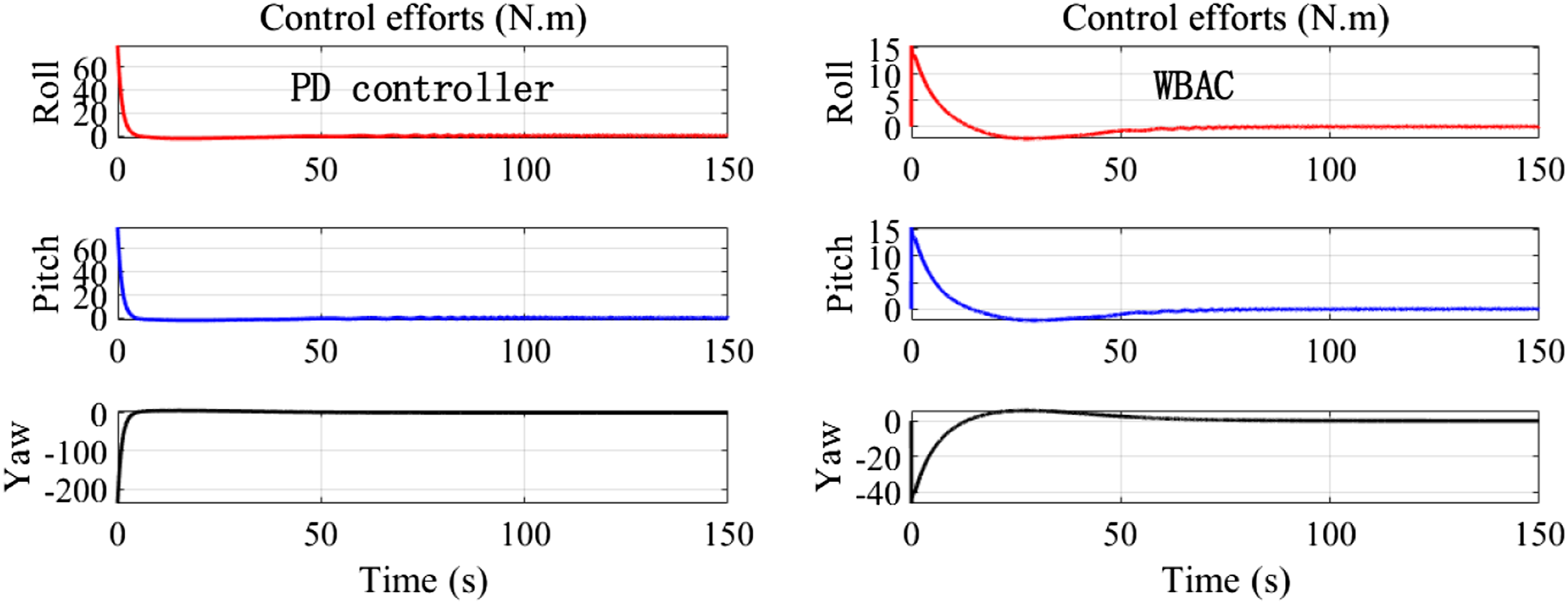
By comparing with the PD controller, as shown in Figures 3 and 4, the WBAC significantly lowers the requirement of the maximum output capacity of control system (the maximum control torque of the WBAC is just about 20% of that of the PD controller), simultaneously ensuring almost the same completion time of large-angle attitude maneuvering (the completion time of the two controllers is 100–120 s). In this case, the induced liquid slosh is very slight and also the jitter in the attitude motion of the spacecraft (Figure 3). Angular velocity of spacecraft of Case A. Attitude control torque of Case A.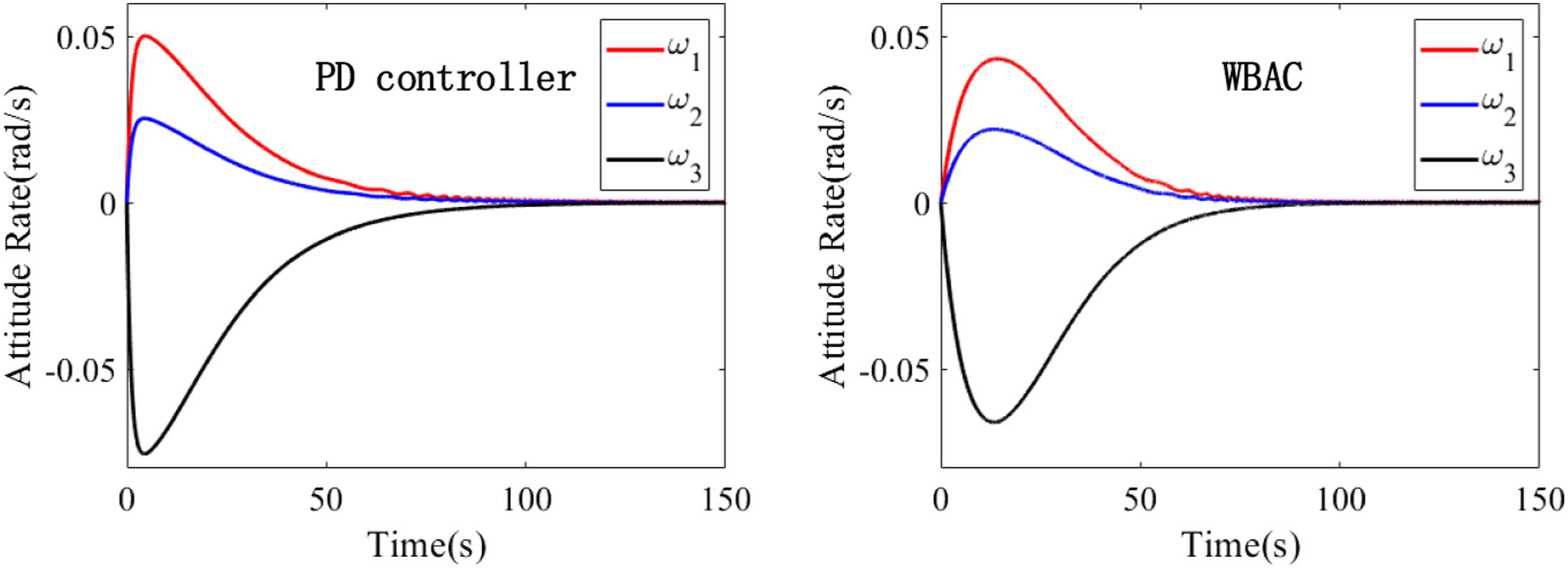
5.2. Results of Case B
Parameters of the controllers for Case B.

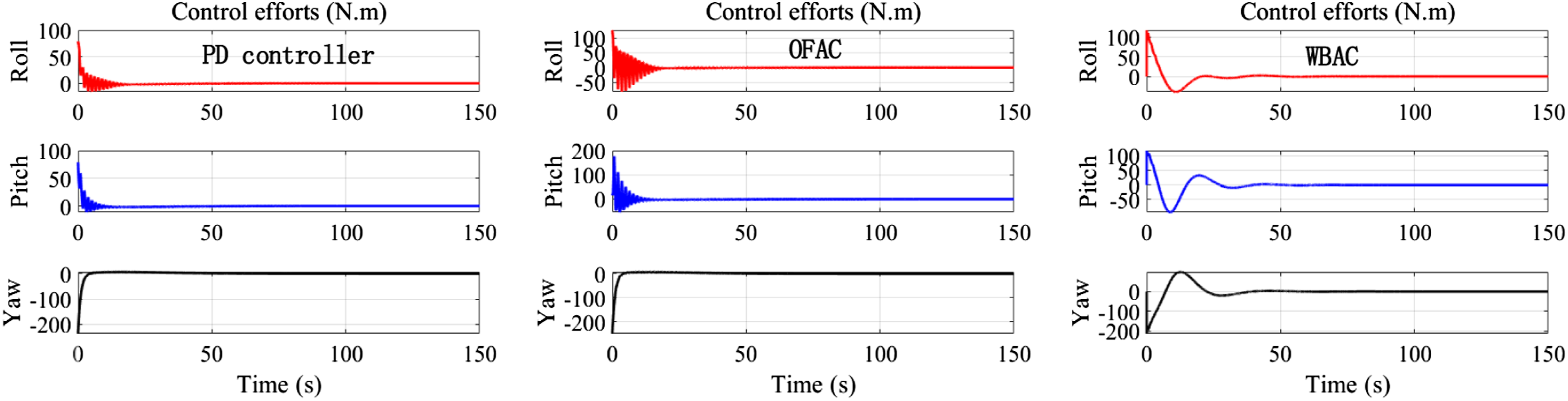
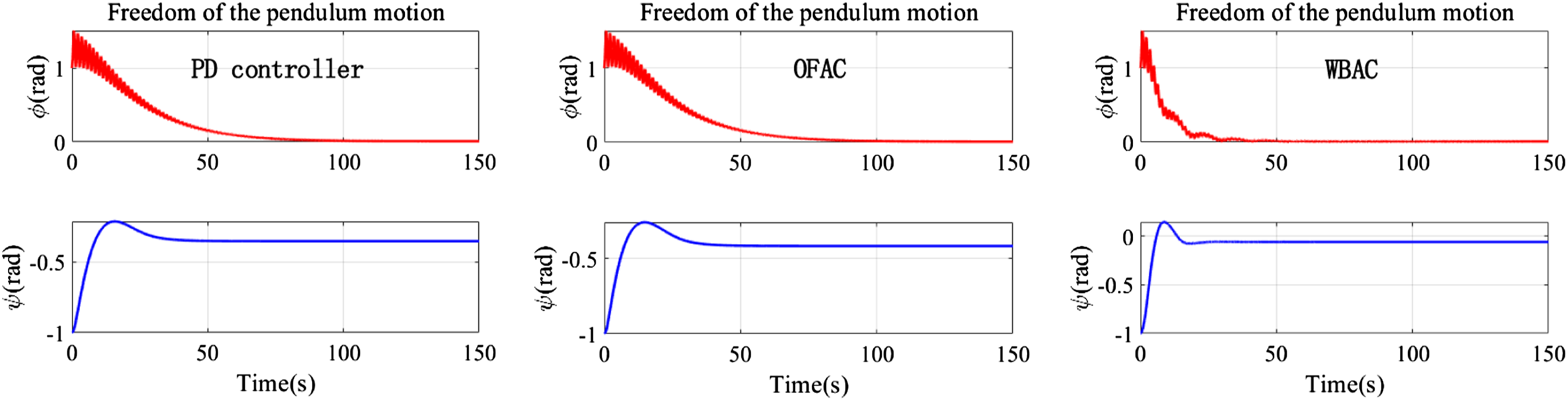
Figure 5 shows the time history responses of the angular velocity of spacecraft under the three different controllers with the same level of maximum output torque (Figure 6). Comparing with the result of the PD controller, the OFAC performs good capacity to reduce the jitter effect of liquid slosh on the attitude motion at the expense of greater control efforts (Figure 6). However, the WBAC shows potential advantages in shortening completion time of attitude maneuvering, suppressing the jitter in the angular velocity of spacecraft (Figure 5), simultaneously accelerating the large-amplitude slosh suppression (Figure 7). Figure 7 shows the liquid has experienced large-amplitude lateral sloshing and finite-angle rotary sloshing during the large-angle attitude maneuvering of spacecraft, and the liquid slosh will be completely dissipated due to the damping effect. The results indicate the potential applications of the proposed WBAC in the large-angle attitude maneuvering of liquid-filled spacecraft when there exists large-amplitude liquid slosh. Angular velocity of spacecraft of Case B. Attitude control torque of Case B. Position coordinates of the slosh pendulum of Case B.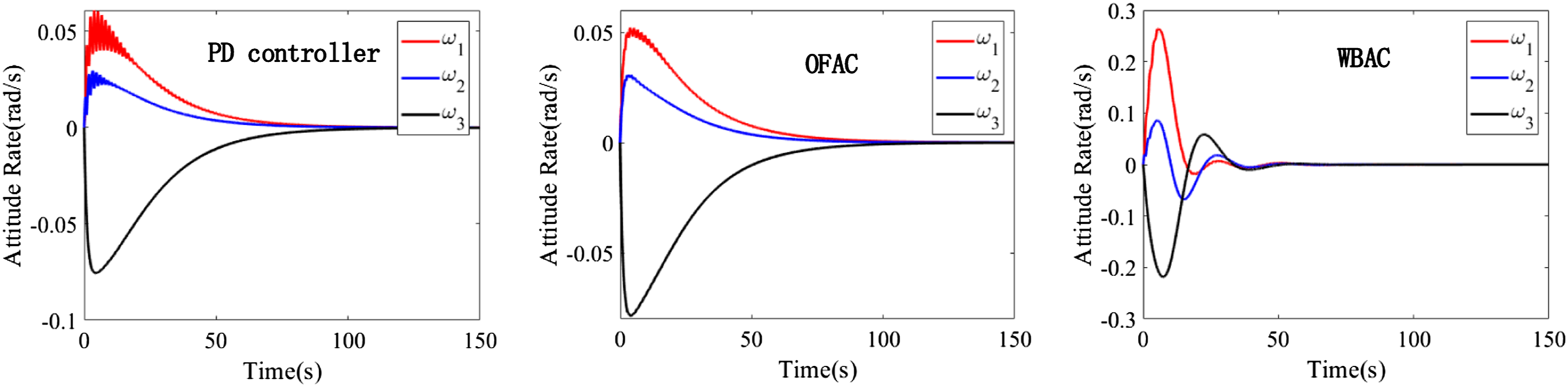
6. Conclusions
The attitude control for three-axial large-angle maneuvers of in-orbit spacecraft with large-amplitude slosh has been studied in this paper. First, a systemized attitude dynamics modeling process of liquid-filled spacecraft was implemented by using the Lagrangian formulation, where the large-amplitude liquid slosh dynamics are equivalently modeled by adopting the composite spherical pendulum model. Then, an improved WBAC, including a wave-based control law, a derivative control law, and a gravity-gradient-torque compensation law, was designed for high-quality control of three-axial large-angle maneuvers of in-orbit liquid-filled spacecraft. In practice, the measurements of the feedback information of the WBAC, including the attitude quaternion and angular velocity of spacecraft and the actual achieved torque, are all done at the control system. Comparing with the PD controller and the OFAC, simulation results show that the WBAC has advantages in shortening completion time of attitude maneuvering, suppressing the jitter in the angular velocity of spacecraft, and accelerating the large-amplitude slosh suppression, simultaneously.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China [grant numbers 11772049, 12132002, and 12202044] and the 13th Five-Year Civil Space Technology Advance Research Project of the Administration of Science, Technology and Industry [grant number D020201].