
Abstract
This study investigates the lane-keeping control of autonomous vehicles with an emphasis on the digital delayed nature of the system. The vehicle dynamics are represented using a kinematic bicycle model, and a hierarchical lane-keeping controller is introduced with multiple delays in the feedback loop. An extension of the semidiscretization method is presented, in order to perform the stability analysis of the digitally controlled vehicle with multiple discrete time delays. The differences between the continuous approximation and the exact consideration of discrete time delays are highlighted. We show that in certain cases, neglecting the effects of quantization can lead to significant inaccuracies, especially when tuning the lower-level controller. The results are verified using a series of small-scale laboratory experiments.
Keywords
1. Introduction
Over 90% of passenger car road accidents are at least partially caused by human error (Garnowski and Manner (2011); Treat et al. (1979)). Advanced driver assistance systems and autonomous vehicles can potentially prevent a significant number of these accidents, having a direct impact on traffic safety (Olofsson and Nielsen (2020)). In particular, by preventing unintended lane departures, lane-keeping and lane-changing controllers can help avoid one of the most common types of road accidents (Kusano and Gabler (2014)).
These autonomous driving functions rely on the precise control of the lateral dynamics of the vehicle; therefore, the design and analysis of steering controllers have been a popular research area for several decades (Amer et al. (2017); Ackermann et al. (1995); Fenton et al. (1976)). Traditional methods include simple proportional feedback control (Broggi et al. (1999)), the additional use of feedforward terms (Cremean et al. (2006); Takahashi and Asanuma (2000)), PID control (Marino et al. (2011)), as well as optimal control techniques (Mobus and Zomotor (2005)). Various nonlinear control methods have also been successfully applied, such as feedback linearization (Liaw and Chung (2008)), Lyapunov-based control design (Rossetter and Gerdes (2006)), and sliding-mode control (Choi et al. (2015)).
Despite the extensive research interest in vehicle steering control, the effect of time delay is rarely investigated in such systems (Heredia and Ollero (2007); Hoffmann et al. (2007); Liu et al. (2006)). However, these controllers include non-negligible time delays originating from various sources. For example, the required measurement equipment (GPS and camera image processing) often has low-frequency sampling (Jo et al. (2015); Yi et al. (2013)). This, along with communication delays, the computation time of the filtering, localization and control algorithms, as well as the actuation delays, can add up to several hundred milliseconds. This can severely reduce the domain of stabilizing control gains; therefore, not taking into account the effects of time delay can easily lead to stability issues (Beregi et al. (2018)). In addition, modern digital feedback control systems work with quantized signals (Åström and Wittenmark (2011); Ogata (1995)). Conversely, the occurring time delays should be investigated accordingly (Insperger (2011)). The difference between the time delays in continuous and digital systems can have a non-negligible effect on the stability of the car.
This study investigates the dynamics of a hierarchical lane-keeping controller with the explicit consideration of feedback delay in both the lower-level and the higher-level control loop. In addition, the effects of digital sampling with zero-order hold are also investigated to quantify the error with respect to a continuous approximation of the time delays. In order to perform the stability analysis of the hierarchical digital control system with multiple time delays, an extension of the semidiscretization method (Insperger (2011)) is presented.
The results are verified using a small-scale experimental measurement setup. Although all developed autonomous driving functions should eventually be verified in real-vehicle tests (Li et al. (2016)), these tests are usually expensive and carry potential accident risks. Therefore, laboratory experiments can be used as an intermediate step to verify the theoretical calculations in a cost-effective way (Gietelink et al. (2009)). For this purpose, a small-scale experimental measurement setup was built, which makes the testing of different lane-keeping control algorithms possible (Vörös et al. (2021)).
The rest of the paper is organized as follows: in Section 2, the investigated vehicle model is introduced and its equations of motion are derived. In Section 3, the hierarchical lane-keeping controller is presented, leading to a set of delay differential equations characterizing the closed-loop system. In Section 4, an extension of the semidiscretization method is introduced, to perform the stability analysis of digital control systems with multiple discrete time delays. In Section 5, the stability analysis of the vehicle model with the hierarchical lane-keeping controller is performed, with a focus on the differences between the continuous approximation and the exact consideration of discrete time delays. A series of validating measurements are carried out in Section 6 using the experimental test rig and the results are compared to the theoretical stability charts. The conclusions are drawn in Section 7 and some possibilities for further research are also highlighted.
2. Mechanical model of the car
The lateral dynamics of the vehicle is modeled with a planar kinematic bicycle model, where the width of the vehicle is neglected (see Figure 1). In addition, we assume rigid wheels with point contact at the ground; therefore, no tire forces and self-aligning moments are considered. The position and orientation of the vehicle are described by the coordinates XR and YR of the center of the rear axle (point R), as well as the yaw angle ψ. The steering angle is denoted by δ, while the vehicle wheelbase is L. In order to account for the actuation dynamics of the steering system, the moment of inertia of the steering gear about the center of the front axle (point F) is considered as J and the steering torque is denoted by T. Bicycle model with rigid wheels.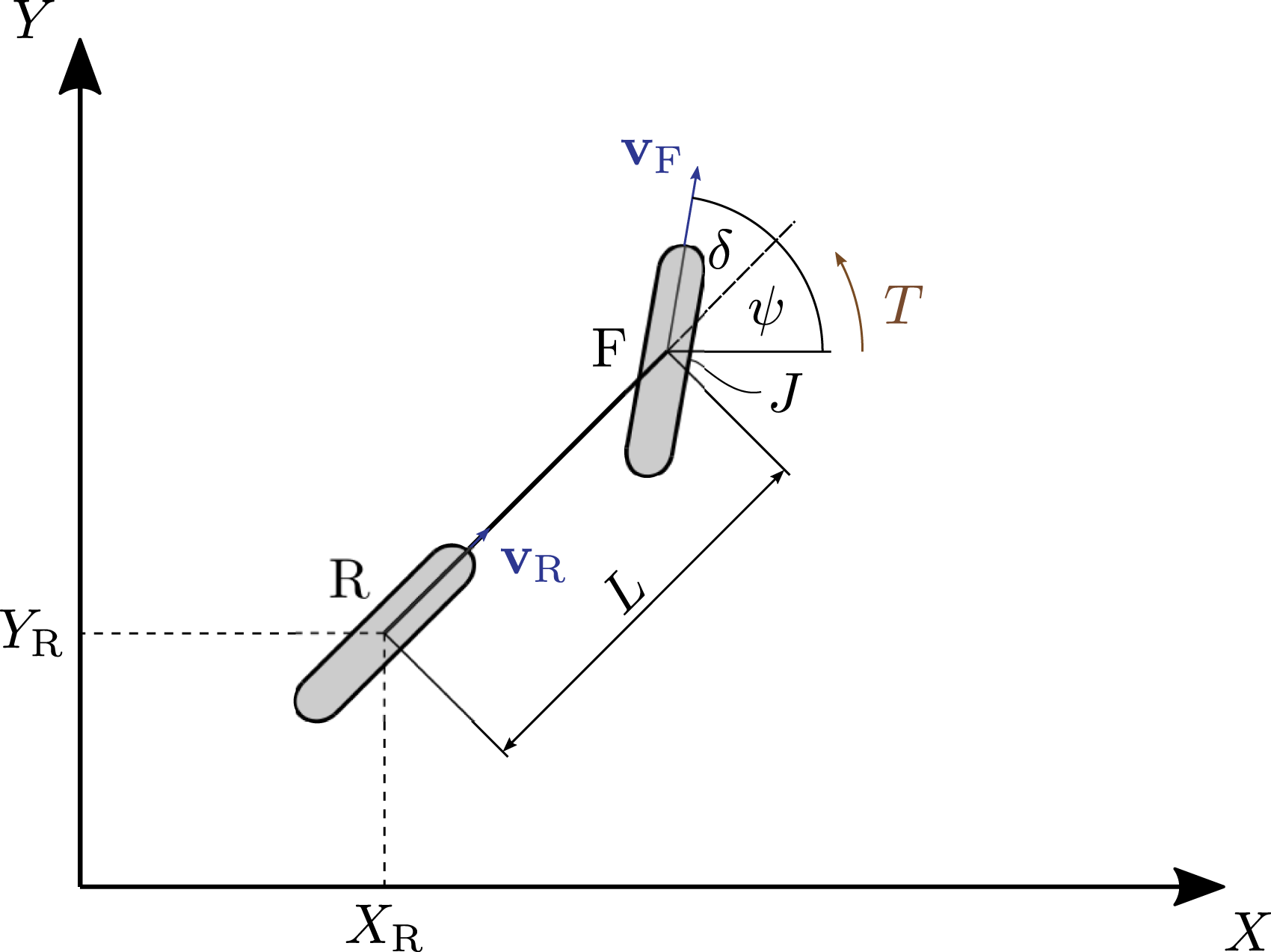
We choose the position coordinates of the rear axle, the yaw angle of the vehicle, and the steering angle as generalized coordinates, leading to the generalized coordinate vector

Choosing the rear wheel coordinates is a quite standard technique. The resulting equation of motion will have the simplest form in this way. Since no tire deformation is considered in our model (i.e., no side slip occurs), the direction of the velocity vectors at the front and rear axles are at all times determined by the rolling direction of the wheels. This means that the velocity vector

Furthermore, we assume that the longitudinal speed of the vehicle is constant (|

The presence of kinematic constraints makes the vehicle model nonholonomic. To derive the equations of motion of the system, we use the Gibbs–Appell method (Gantmacher (1975)), which requires the definition of so-called pseudo-velocities. Since the number of generalized coordinates is four and the system includes three kinematic constraints, one pseudo-velocity needs to be defined, which we choose to be the steering rate


In addition, the Gibbs–Appell equation leads to the fifth equation of motion, which describes the steering dynamics

3. Hierarchical steering control
In this section, a hierarchical steering controller is introduced (see Figure 2), taking into account communication and sampling delays. The goal of the controller is to ensure that the vehicle follows a reference path, which is achieved by feeding back the lateral position of the rear axle YR and the yaw angle ψ. Assuming a straight-line reference path along the X axis (YR ≡ 0, ψ ≡ 0), the higher-level controller generates the desired steering angle using the proportional gains k
Y
and k
ψ
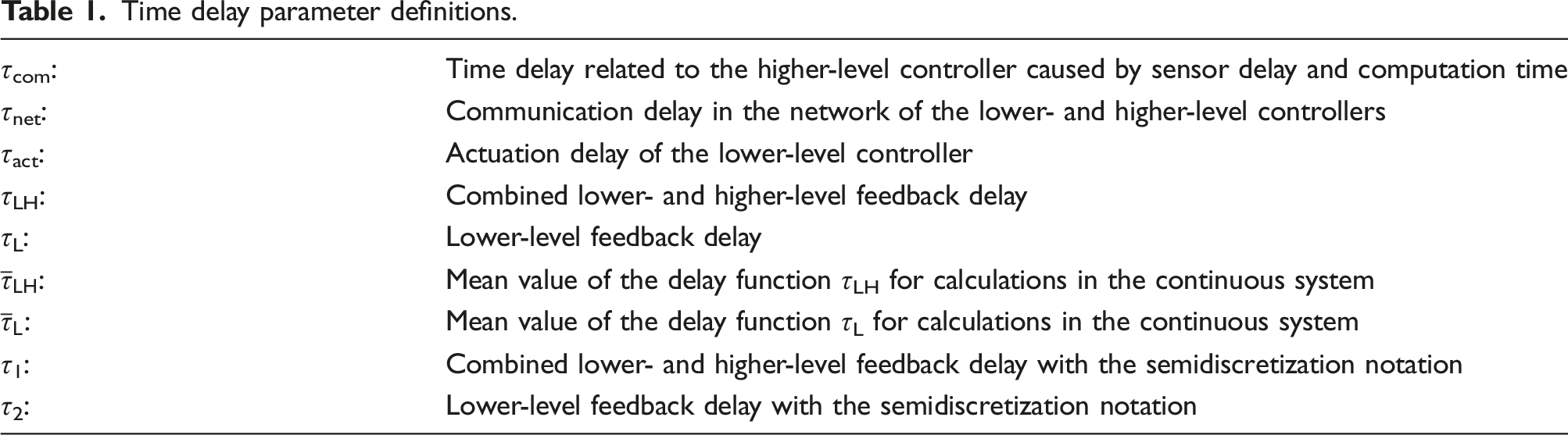
as follows Block diagram of the hierarchical control scheme used for the lateral control of the vehicle. Time delay parameter definitions.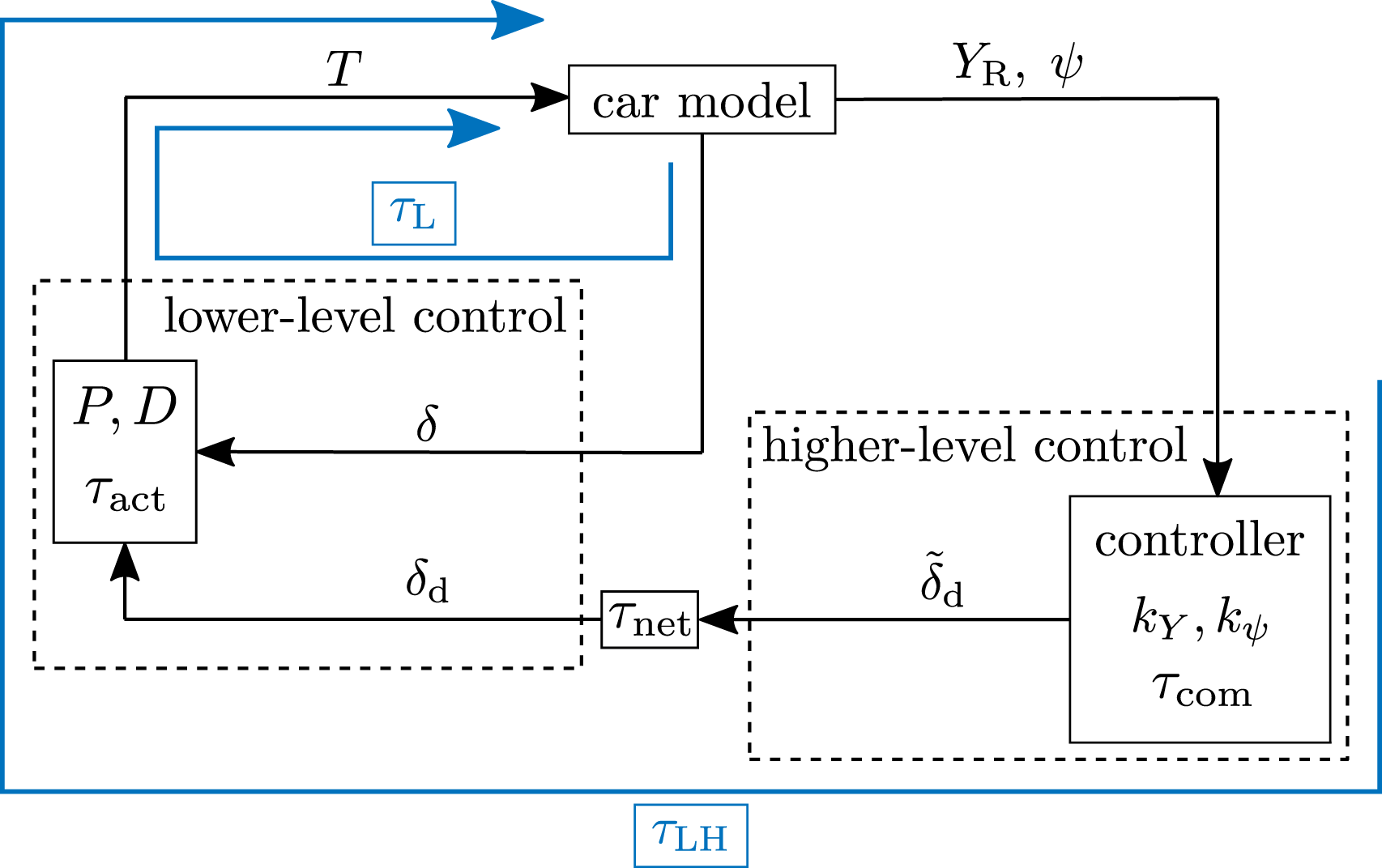


The control gains P and D can be normalized with respect to the moment of inertia J, leading to the reduced control parameters
Furthermore, we introduce the time delay values related to the control loop as (see Figure 2)
Therefore, in the closed-loop system, when the hierarchical steering controller is enabled, the dynamics of σ1 in (6) can be modified to
4. Semidiscretization method for digital controllers with multiple delays
The lane-keeping controller in Section 3 was presented in continuous time, but when implemented in practice, a digital controller will have to be used. This means that due to the effects of digital sampling, the time delays will not remain constant, but they will be continually changing according to time periodic sawtooth-like functions (see Figure 3). A powerful method for performing the linear stability analysis of such digital systems with time periodic time delays is the semidiscretization method (Insperger (2011)). First, we present a brief review of the general concept of semidiscretization for time delay systems, and then we show how it can be extended for the case of multiple discrete delays. Illustration of the sawtooth-like time periodic nature of time delays in digital systems.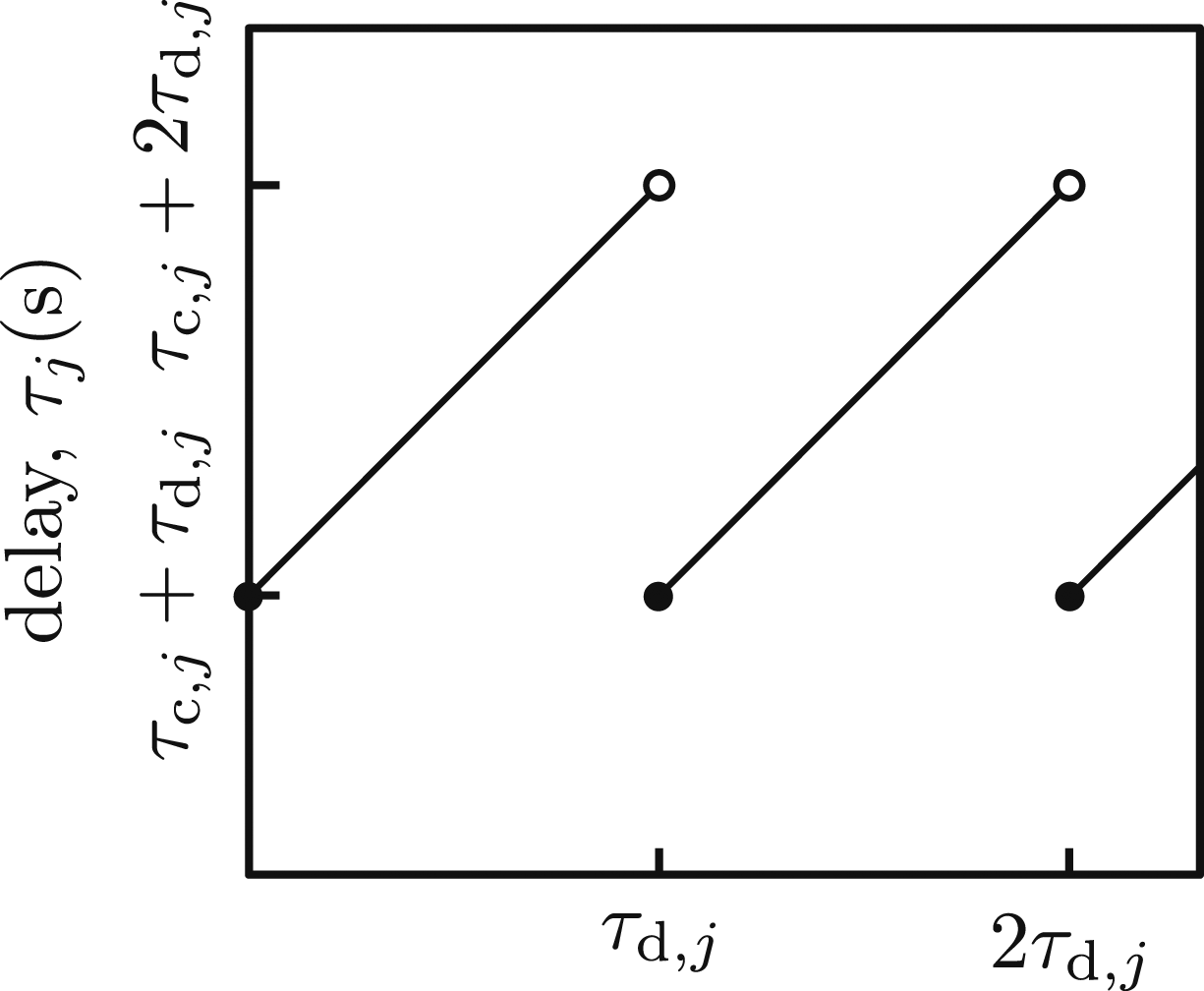
4.1. General concept of semidiscretization
Consider the linear system with multiple continuous point delays
By introducing the discrete time scale t
i
= ih, where 




The constant approximation of the delayed terms in (13) corresponds to the sawtooth-like periodic approximation of the constant time delays, as in Figure 3. Therefore, if there is only one delay in the system (g = 1) and the discretization time is set to be equal to the sampling time (r = 1), the semidiscrete system can be used as a model for digital sampling with zero-order hold (Åström and Wittenmark (2011); Ogata (1995); Stépán (2001)). This is, however, more complicated when there are multiple delays present in the system, as in, for example, the hierarchical controller presented in Section 3. Therefore, in the following, we present an extension of the semidiscretization method in order to handle digital controllers with multiple delays. The proposed method will then be used in Section 5 to perform the stability analysis of the closed-loop vehicle model with the hierarchical lane-keeping controller.
4.2. Extension for systems with multiple discrete time delays
If there are multiple discrete delays in a digital system, each time delay can be characterized by a separate periodic sawtooth-like function. For the jth time delay τ
j
, the minimum and maximum of this periodic function is defined as τj,s = τc,j + τd,j and τj,e = τc,j + 2τd,j, respectively, as in Figure 3. The subscripts c and d refer to the continuous and digital parts of the delay functions, respectively; furthermore, subscripts s and e mean the starting value and end value of the sawtooth-like time periodic functions. The time period of the τ
j
(t) function will then be τe,j−τs,j. The following integers can be introduced to denote the rounded length of τs,j and τe,j in terms of multiples of the discretization step h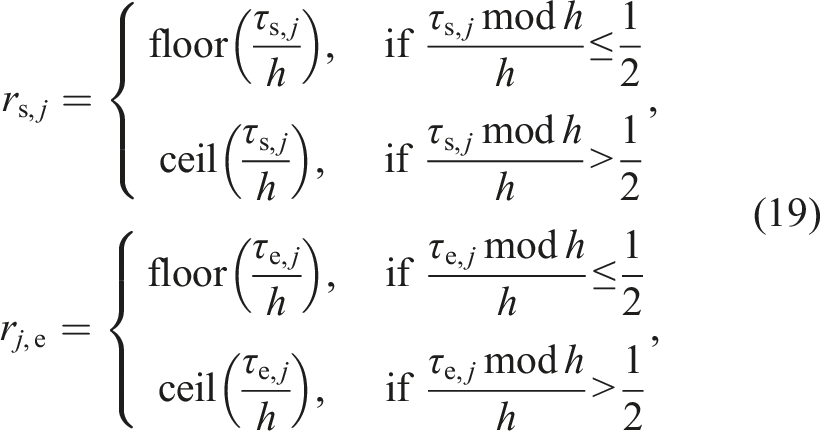




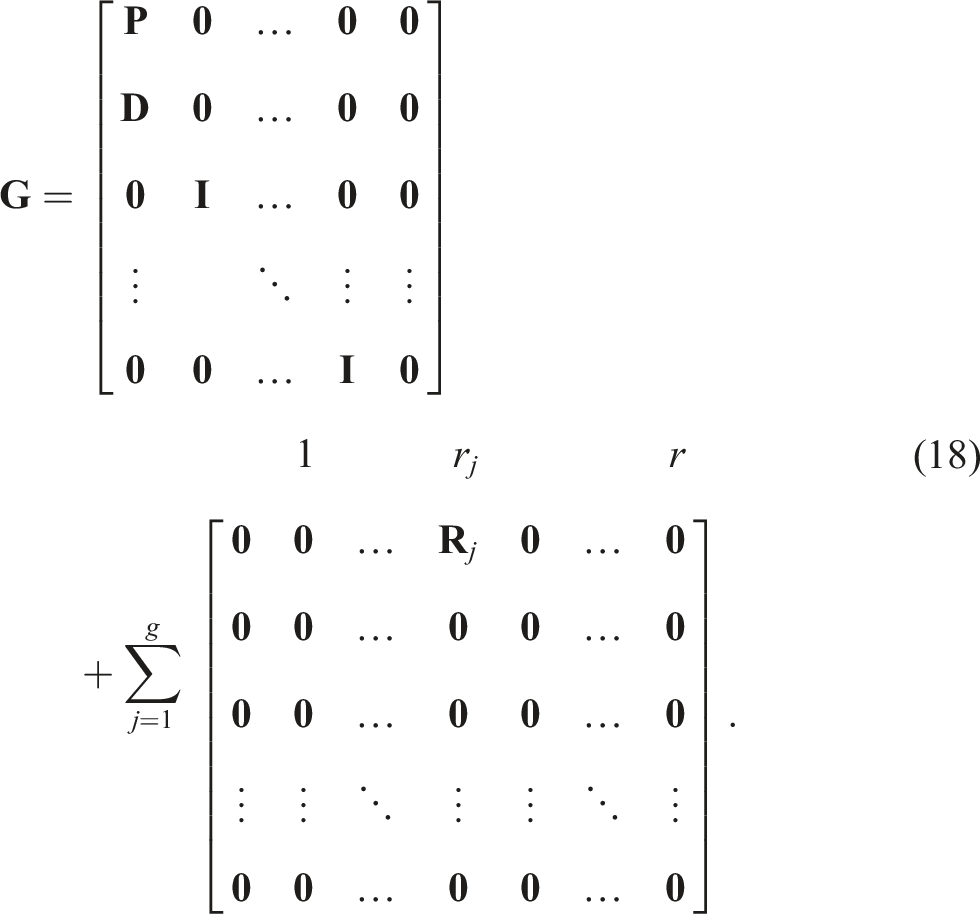
In order to account for the sawtooth-like periodicity of each individual time delay, the positions of 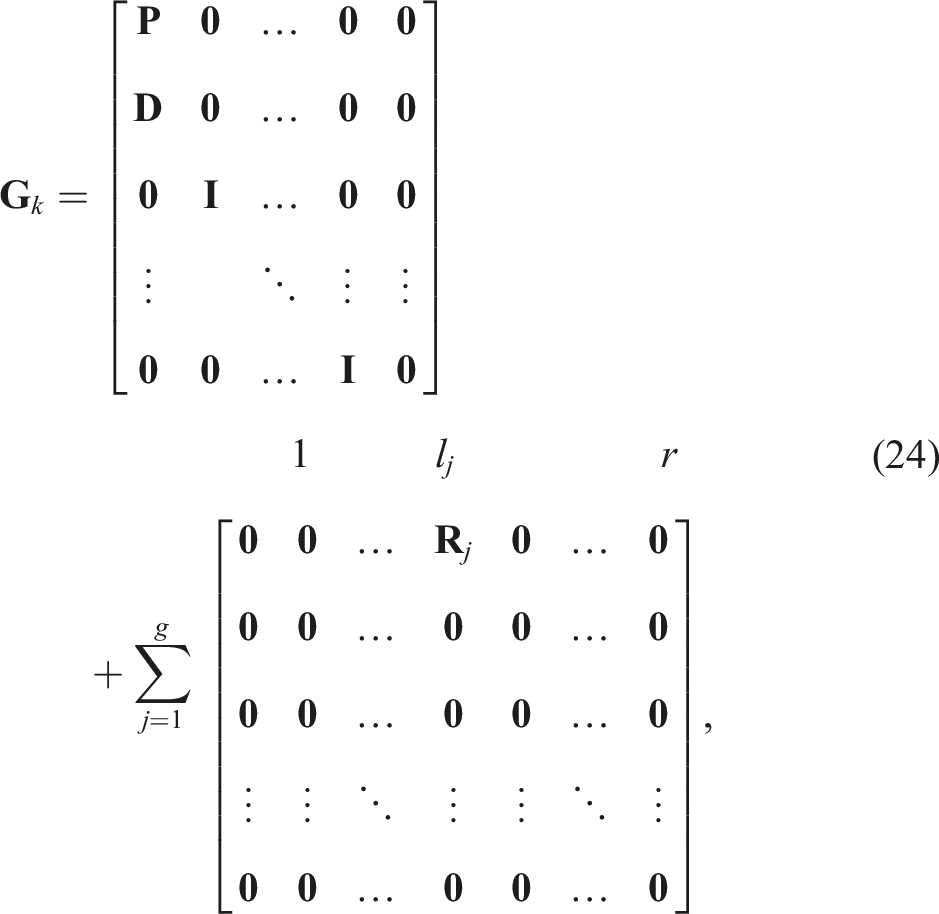


In the first iteration (k = 0), the position of the matrices
Note that while the constant approximation of the delayed terms over the discretization step h inherently introduces a sawtooth-like periodicity of length h in each time delay, the shifting position of the coefficient matrices
5. Stability analysis
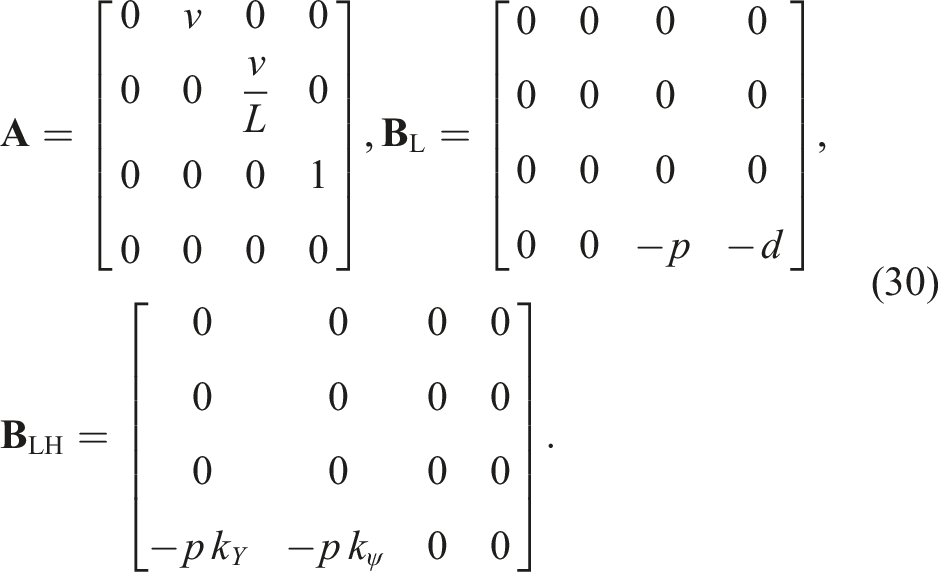
In this section, we perform the linear stability analysis of the vehicle model with the hierarchical lane-keeping controller as defined in (5) and (11), for the steady state of rectilinear motion along the X axis. This corresponds to the state variables

Linearizing the remaining equations of the closed-loop system around (27) leads to the system of linear differential equations
In the following, we perform the stability analysis of the system in order to uncover the regions of control gains that can stabilize the straight-line motion of the vehicle. The derivations will be performed for both the continuous and the discrete time control case so that the difference in results between the two modeling approaches can be highlighted.
5.1. Continuous case
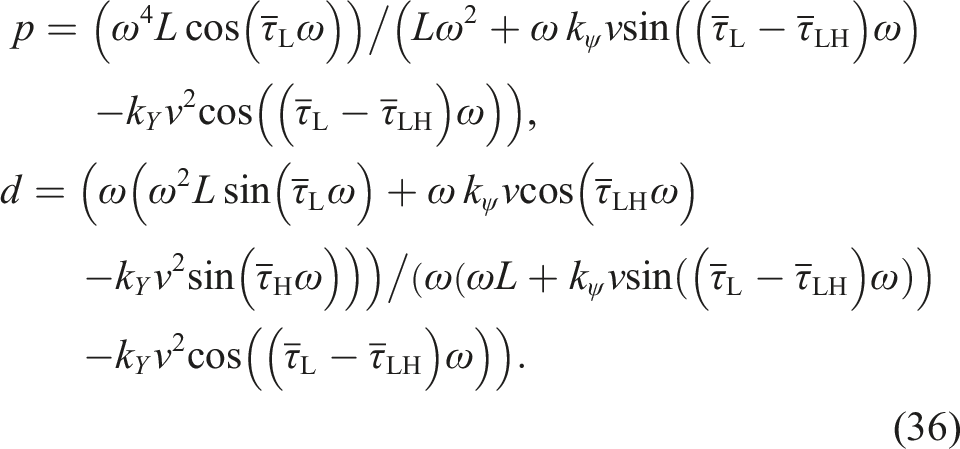
The stability boundaries for continuous time delays can be calculated using the D-subdivision method (Insperger (2011)). In the continuous case, let us represent the periodically changing digital time delays with their means, which will be denoted by overbars, that is, 

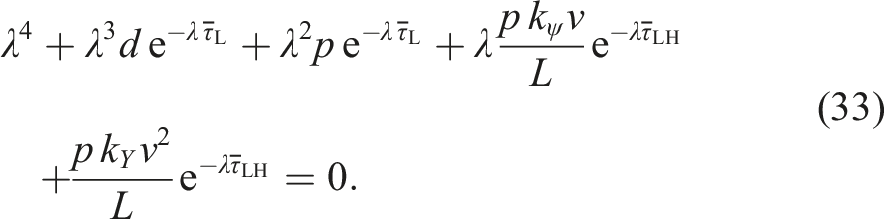

Considering the control gains of the higher-level controller, the stability boundaries are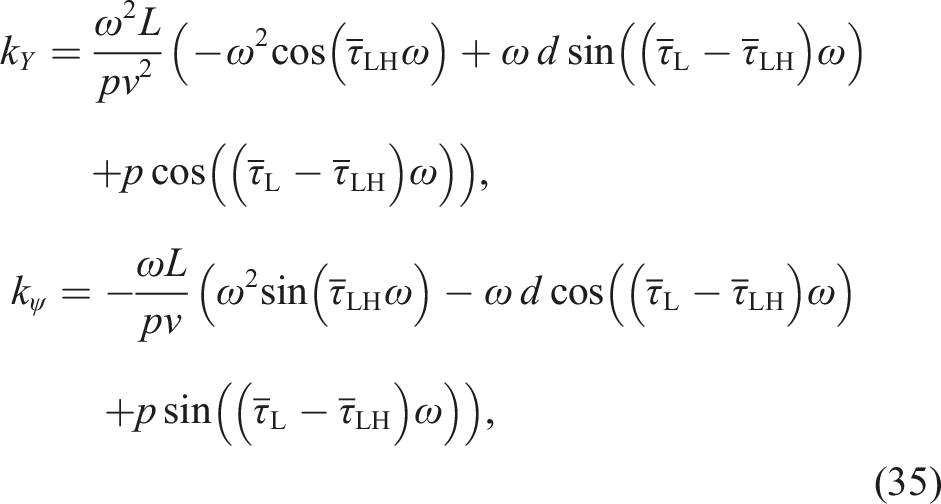
5.2. Digital system
For the stability analysis of the discrete time case, we used the semidiscretization method as detailed in Section 4.2. The linearized system in (29) can be brought to the form in (12) by defining Sawtooth-like time periodic delay functions of the digital system. The time delay of the lower- and higher-level controller together can be seen in (a) and the lower-level controller in (b).
In the experimental setup detailed in Section 6, the higher-level control delay τcom can be altered programmatically. The sampling frequency between the lower- and higher-level controllers is 50 Hz, corresponding to τnet = 20 ms, while the sampling frequency of the actuator is 330 Hz, leading to τact ≈ 3 ms. With the consideration of these delay values, the discretization time step was chosen to be h = 1 ms during the calculations.
5.3. Comparison
Figure 5(i) shows the stability charts of stabilizing control gains for both the continuous and discrete time delay cases. The stability charts were generated using the parameter values listed in Table 2, corresponding to the experimental setup in Section 6. The delay of the higher-level controller was set to τcom = 1 ms. (i) Comparison of the stability boundaries for the continuous and digital systems. The time delays of the continuous and digital systems are Parameter values of the experimental setup.
The continuous approximation of the discrete delays can be calculated as the mean value of the sawtooth-like functions. This corresponds to
Figure 5(i)(a) shows the stable region of the higher-level control gains k Y and k ψ .
It can be seen that there is negligible difference in the stability boundaries between the continuous and the digital system. The difference is more pronounced in the plane of the lower-level control gains p and d in Figure 5(i)(b), but the continuous approximation is still reasonably accurate.

Parameters of the best performance points for different sampling time delays τcom in the k Y −k ψ and p−d planes. In the first column of the table, system d corresponds to the digital and c to the continuous system. The system parameters are v = 10 m/s, L = 0.238 m. The control parameters are p = 380.531/s2, d = 31.711/s in the k Y −k ψ plane and k Y = 0.0171/m, k ψ = 0.101 in the p−d plane.
Based on these results, it is advisable to choose relatively smaller control gains when tuning the higher-level controller (Figure 5(i)(a)). Even though the system would remain linearly stable with larger values of k Y and k ψ , the larger gains would not lead to better control performance. In case of the lower-level controller (Figure 5(i)(b)), the optimal gains in terms of system response are very close to the stability boundary, which could easily lead to stability loss due to, for example, modeling uncertainties or control gain perturbations. Therefore, a balance needs to be found between system response and robustness against undesirable effects when tuning the lower-level controller.
Figure 5(ii) shows the effect of increasing the higher-level control delay τcom on the stable domains. Larger delay values significantly reduce the stable region in the plane of the higher-level control gains k Y and k ψ (see Figure 5(ii)(a)), while there is negligible difference between the stability boundaries of the continuous and the digital system. The stable region of the lower-level control gains p and d (Figure 5(ii)(b)) is not affected as much by the value of τcom, but the difference between the stability boundaries of the continuous and the digital system is becoming more pronounced as τcom is increased. In the case of τcom = 50 ms, neglecting the effects of quantization can lead to a significant overestimation of the stable domain. This implies that taking into account the quantized nature of the digital system is more important when tuning the lower-level controller, especially in the case of larger time delays.
6. Measurement results
A series of measurements was carried out using the experimental test rig shown in Figure 6 (see Vörös et al. (2021) for more details). The measurement setup consists of a small-scale model vehicle and a conveyor belt. The vehicle is anchored to the frame of the conveyor belt using a custom suspension mechanism that only constrains the displacement of the car in the longitudinal direction of the belt, while leaving the rest of the degrees of freedom free. The suspension system includes a roller bearing linear guide with a linear encoder, as well as a 3D printed mechanism with ball bearings and magnetic rotary sensors. The running conveyor belt provides the longitudinal velocity of the vehicle, while the steering torque is generated by a servo motor using the controller in (8). The sensor setup provides measurements of the lateral position and yaw angle of the vehicle, and a National Instruments (NI) CompactRIO 9039 unit is used for data acquisition and processing. The higher-level controller in (7) is also running on the NI control unit, where the control gains k
Y
−k
ψ
and the sampling delay τcom can be adjusted programmatically. The values of the lower-level control gains and the delays τnet and τact are fixed, as listed in Table 2. Measurement setup for the validation process. It consists of a conveyor belt, a linear guide, and the small-scale model of the car. The conveyor belt can run with constant velocities. The guide constrains the displacement in the longitudinal direction, while leaving the rest of the degrees of freedom of the car free.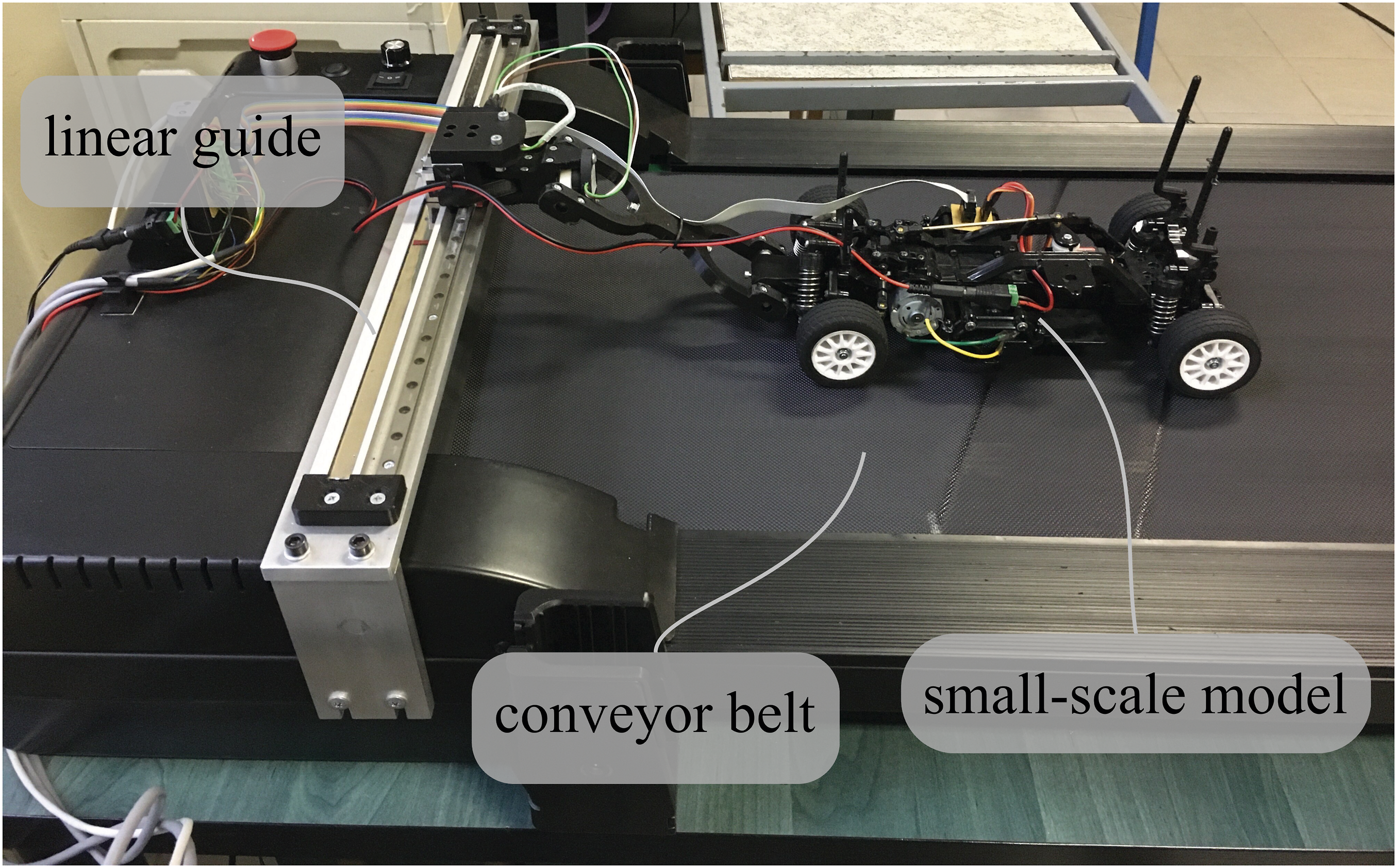
The validating measurements were carried out with velocities v = 1.5 m/s and v = 2.5 m/s, and the stability of the system was assessed for different sets of k
Y
–k
ψ
values. The measurement points along with the stability boundary of the digital model are plotted in Figure 7. The shape of the experimentally determined stability boundaries show good correspondence with the analytical solution, but there are some large quantitative differences at certain parts of the stability charts. These differences can potentially be explained by the simplifications of our mechanical model: on the one hand, neglecting the tire side forces and side slip angles can have a strong effect on the dynamics of the vehicle. On the other hand, some dissipation effects due to viscous damping and friction might be present in the linear guide, which could also alter the results. Moreover, nonlinear effects not investigated in this study can make it hard to measure the exact stability boundaries. Nevertheless, the analytical results still provide a reasonably accurate prediction of stabilizing control gains. In future studies, the results can be improved, and the system can be investigated more in detail. A more complicated car model can be used with elastic wheels that take the forces and friction into account. Furthermore, the model of the lower-level control scheme can be improved as well. Measurement results for velocities (a) v = 1.5 m/s and (b) v = 2.5 m/s in the k
Y
−k
ψ
plane for τcom = 1 ms. The rest of the parameters are listed in Table 2. The green circles and red crosses are stable and unstable measured points, respectively. The black line is the analytical result for the digital controller.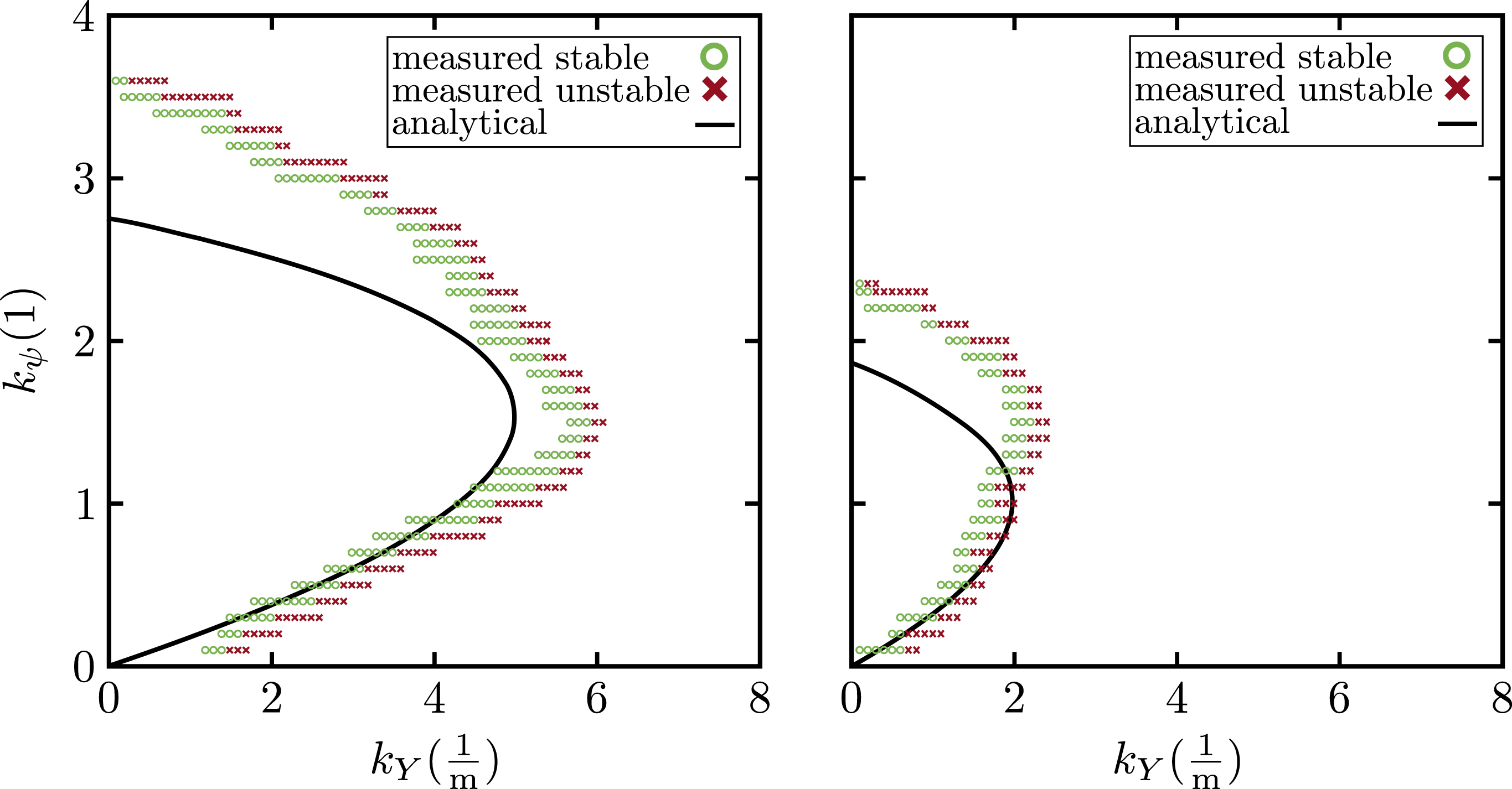
Overall, the measurement results confirm the location and shape of the domain of stabilizing control gains of the higher-level control law. However, since the difference between the analytical results based on the continuous and the digital system model in the plane of the higher-level control gains was negligible (see Figure 5(i)(a) and (ii)(a)), the measurement results provide no additional insight into the effects of digitization, that is, the measurement uncertainties already lead to larger discrepancies in the stability charts than the calculated differences between the continuous and the digital system. Based on Figure 5 (i)(b) and (ii)(b), measurements in the plane of the lower-level control gains could potentially provide a clearer picture regarding the effects of digitization.
7. Conclusion
This study investigated the stability of a lane-keeping controller with hierarchical digital feedback control. The single track kinematic model of cars was used in which the steering dynamics was also considered. The differential equations were derived and the linearization provided the mathematical expressions of the vehicle model. Delayed control laws of a simple lane-keeping controller were implemented.
To construct linear stability charts of the controller, the theory of the semidiscretization method was expanded in a way that digital systems with several delays can be investigated. Using this method together with the D-subdivision method, the stability charts of both continuous and digital systems have been determined highlighting the effects of quantization on the stability of the system.
The results showed that for small higher-level sampling time delays (τcom), the difference is negligible both in the plane of the lower- and higher-level control gains. However, the parameter analysis implies that for increasing τcom higher-level sampling time delays, the differences between the continuous and digital systems in the plane of the lower-level control parameter gains p, d are getting more pronounced and non-negligible.
A measurement setup was built with a hierarchical control scheme, which is closely related to the ones used in real, full scale vehicles. Theoretical stability limits of the digital system were compared with the measurement results. The measured and calculated stability properties showed good correspondence. However, based on the calculated stability charts in the plane of the higher-level control gains, the effect of digitization is not severe in this particular system; therefore, the measurement results could not be used to verify the importance of digital effects. The analytical results suggest that experiments in the plane of the lower-level control gains could potentially provide more conclusive results regarding the importance of digitization in the model. Additionally, in other, more detailed models of the controlled vehicle, the effect of digitization might also prove to be more pronounced.
This can be true for other engineering applications as well, especially where the system is described by neutral or advanced delay differential equations (Insperger et al. (2010); Insperger and Kovacs (2017)). Another aspect, which is also an outlook of this study, is that the digital nature of controllers can have significant effects on the nonlinear behavior of dynamical systems (Gyebrószki and Csernák (2019)). Investigating how the digital effects influence the nonlinear behavior of the controlled vehicle is an important direction of future research.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The research reported in this paper has been supported by the National Research, Development, and Innovation Office under grant no. NKFI-128422 and no. 2020-1.2.4-TÉT-IPARI-2021-00012.