To effectively suppress the longitudinal vibration of the car under the conditions of high-speed operation and emergency braking, and improve the ride comfort of the car system, this paper proposes an adaptive fuzzy inverse optimal output feedback control strategy. Firstly, the dynamic model of the high-speed elevator system is established and the nonlinear dynamic model is approximated by the fuzzy logic system, and the auxiliary system model is established. Fuzzy state observer is designed to estimate the unmeasurable state. Furthermore, an adaptive inverse optimal output feedback controller based on fuzzy observer is designed by using adaptive backstepping technology and inverse optimal control principle. The stability analysis shows that the proposed adaptive fuzzy inverse optimal output feedback control strategy not only ensures the stability of the car attitude of high-speed elevator but also realizes the inverse optimization of the target cost function. Finally, the acceleration time–frequency response analysis of the two typical stages of high-speed elevator uniform running and emergency braking is carried out, and the numerical results are compared with the linear quadratic controller optimized by stepping quantum genetic algorithm (GA-LQR) and controller based on the state-dependent Ricatti equation (SDRE). The analysis verifies the effectiveness of the controller.
As an indispensable vertical means of transportation in modern buildings, vibration and noise of high-speed elevators are the main factors affecting passenger experience during use. At the same time, severe vibration will affect the reliability of precision instruments in high-speed elevators and reduce the safety of elevator operation. Therefore, in the process of their design and development, their vibration damping and anti-vibration control are essential. However, the vibration of the elevator car is mainly related to the elevator lifting system (Arrasate et al., 2014; Oki et al., 2021; Peng et al., 2020; Zhang et al., 2020, 2021b). Peng, Xabier et al. comprehensively analyzed the whole longitudinal vibration process of the elevator traction system, and the results showed that the constant speed stage of the high-speed elevator after accelerating to the speed peak and the free vibration stage of the car after emergency braking were the most violent dangerous stages of vibration. Among them, the vibration in the constant speed stage is mainly composed of the variable-length induced vibration of the traction rope of the high-speed elevator (Sandilo and Horssen, 2014) and the excitation force of the traction machine, which greatly affects the comfort and safety of the high-speed elevator. At the same time, considering the emergency braking stage of the elevator operation, there will be a period of acceleration-free oscillation (Peng et al., 2018; Xu et al., 2022) after the emergency braking excitation input of the elevator car. The acceleration amplitude and frequency in this stage are huge, and if they are not controlled, they may cause safety accidents in serious cases.
To effectively solve the longitudinal vibration problem of high-speed elevators, many scholars have carried out research on the active control of longitudinal vibration of high-speed elevators (Mei et al., 2009; Wang and Miroslav, 2021). However, most of the controllers developed by Wang et al. (2016) and Zhang et al. (2019) are designed when the parameters of the car model are accurately known. When the system parameter model has unknown nonlinearity and unmeasurable states, the controllers designed above can not only effectively suppress the longitudinal vibration of the car but also may deteriorate the active vibration reduction effect and reduce the ride comfort and operation stability of the elevator. For this reason, the author designs an auxiliary system based on fuzzy logic system (FLS) to identify unknown nonlinear and unmeasurable states of the observation system.
Since FLS and neural network have the ability to approximate unknown functions, some intelligent control methods are developed for the horizontal vibration of elevator car by using this approximate characteristic in combination with other control strategies, which can effectively improve the control performance. For example, He et al. (2022) used the Takagi–Sugeno (T-S) fuzzy model to study the horizontal vibration control problem of the elevator car and proposed a fuzzy adaptive sliding mode control strategy based on the T-S model, which improved the control performance and safety performance of the active guide shoe. Using a predictive synovial control strategy, Wang et al. (2021) proposed an adaptive fuzzy controller for the horizontal vibration system of a high-speed elevator. On the basis of firefly algorithm and fuzzy neural network, Zhang et al. (2021a) presented a variable universe fuzzy control scheme for elevator horizontal vibration with magnetorheological damper. However, they did not consider the optimal control problem with full-state constraints.
The optimal control problem is a difficult problem in the field of modern control. For nonlinear systems, the optimal control problem ultimately boils down to solving the Hamilton–Jacobi–Bellman (HJB) partial differential equation. In fact, in many cases, the solution of HJB equation does not exist or is not unique; therefore, solving HJB equation is the main obstacle to obtain the optimal control of nonlinear systems. To avoid solving HJB equation, Krstic et al. (Krstic and Li, 1998; Krstic and Tsiotras, 1999) proposed an inverse optimal control design method for a class of nonlinear systems. The inverse optimal control is different from the classical nonlinear optimal control. It does not minimize the predetermined cost function by solving the controller, but it minimizes the undetermined objective function by designing a suitable control Lyapunov function (CLF). Based on the idea of inverse optimization (Krstic and Li, 1998; Krstic and Tsiotras, 1999), KD Do (Do, 2019, 2020 established and solved the inverse optimal stabilization and inverse optimal gain allocation problems of stochastic systems driven by Lévy processes and realized the global inverse optimal control of vertical take-off and landing aircraft. It can be seen that the inverse optimal control principle is an applicable and effective method to solve the optimal control problem of the high-speed elevator longitudinal vibration system (HLVS) under the full-state constraint.
Since the actual operating load of the high-speed elevator system has a maximum limit, and considering that the system contains nonlinear and unmeasurable states, in addition, the system of the high-speed elevator is more complicated due to external excitation interference such as the induced vibration of the traction rope and the excitation force of the traction machine, so it is necessary to design a controller that can solve the abovementioned problems to suppress the longitudinal vibration of the high-speed elevator. Therefore, this paper establishes a 7-DOF elevator longitudinal vibration model with electromagnetic actuators and designs a fuzzy state observer for it. Furthermore, the fuzzy adaptive backstepping inverse optimal controller (FABI controller) is designed by using the adaptive backstepping technology and the inverse optimal control principle to realize the active vibration reduction of the HLVS.
The innovations of this paper can be summarized as follows:
1. The unknown nonlinear term of HLVS is approximated by the FLS, and a fuzzy state observer is designed to estimate the unmeasurable state of HLVS, so that the applicable model does not depend on the accurate measurable system, and has more engineering practical value.
2. A fuzzy adaptive backstepping inverse optimal control scheme is proposed, and it is proved by stability that this scheme not only ensures that the auxiliary system (22) is semi-globally uniform and ultimately bounded but also ensures the input state stability of the system (8) and finally achieves the minimum of the inverse optimal target functional, which provides a globally effective control method for the complex vibration in the field of high-speed elevator longitudinal vibration equivalent.
3. Through MATLAB simulation of two typical stages of high-speed elevator constant speed operation and emergency braking, and comparison with the GA-LQR controller (Li et al., 2022) and elementary state-dependent Ricatti equation (SDRE) controller (Santo et al., 2016), the time–frequency response characteristics of car system vibration acceleration are analyzed, which verifies the effectiveness and progressiveness of the designed controller.
2. System modelling and problem formulation
2.1. High-speed elevator longitudinal vibration system
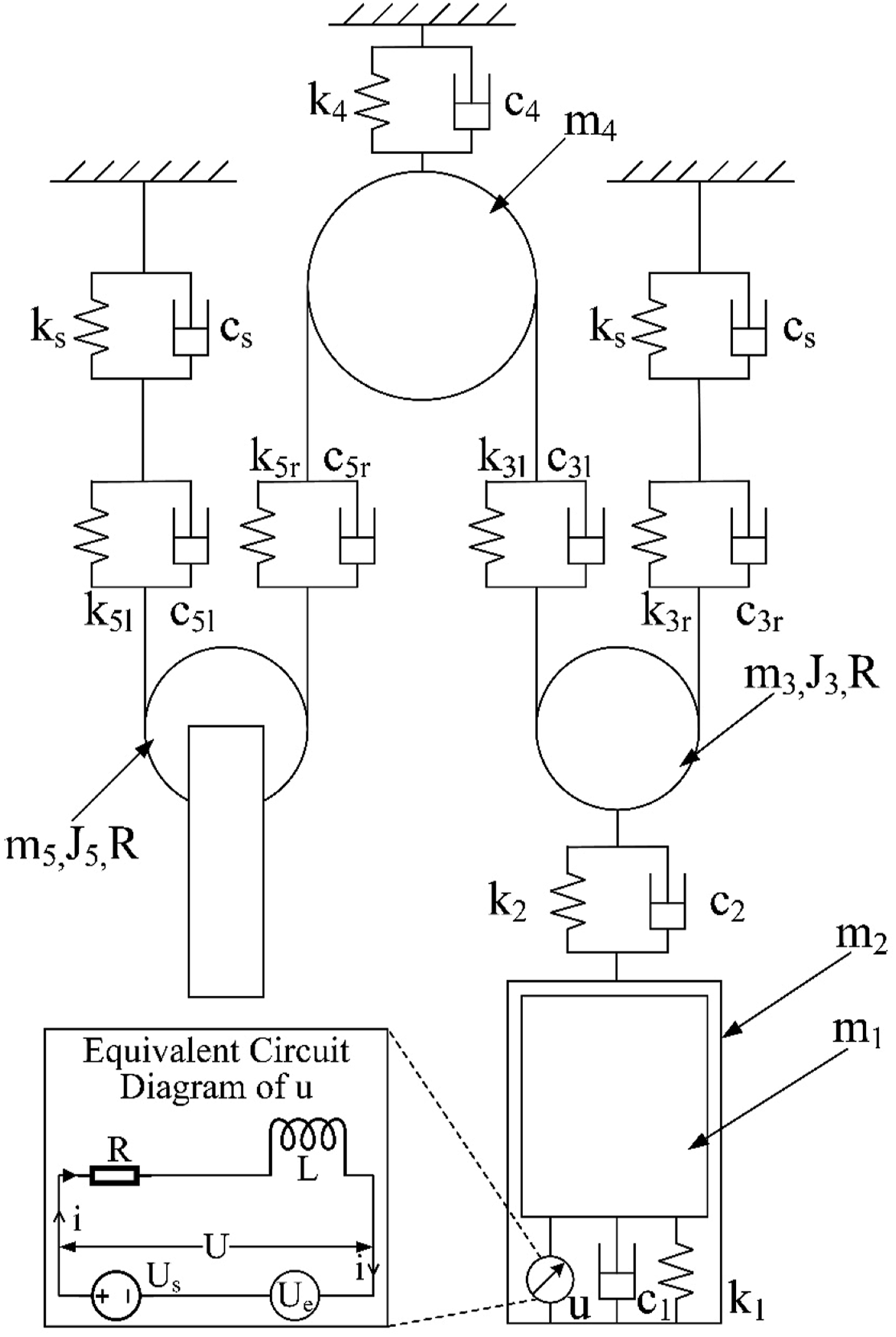
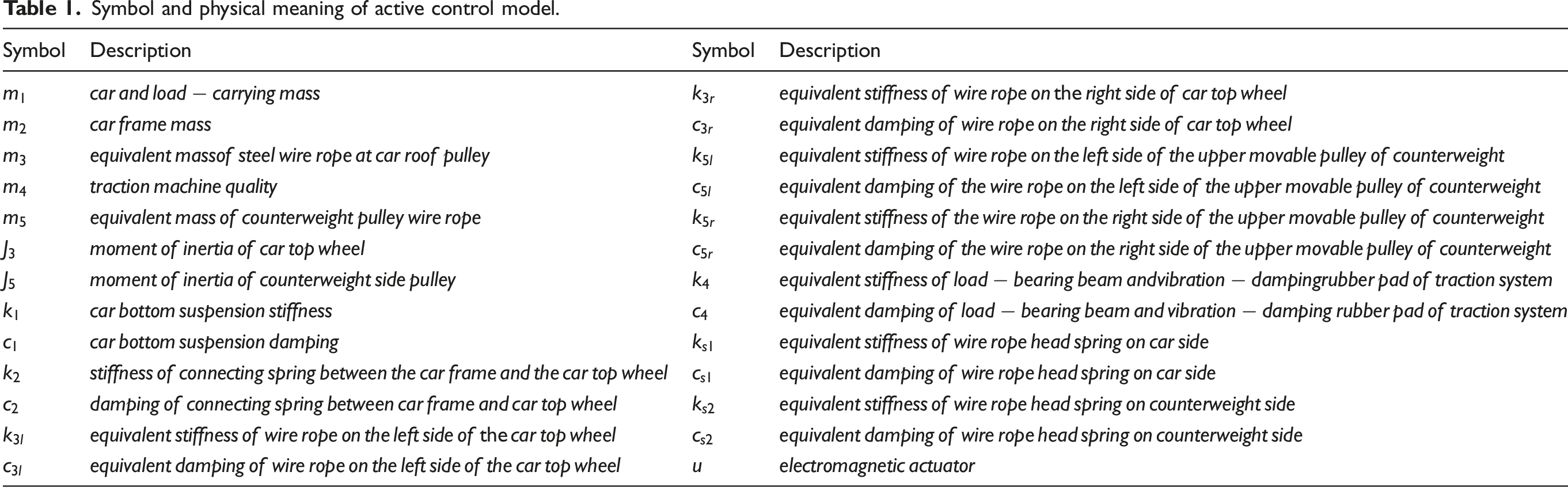
The object of this study is a machine-room-less traction elevator. Between the car and the car frame, an electromagnetic actuator is installed to output an active control force to actively reduce the longitudinal vibration of the car. As shown in Figure 1, the longitudinal vibration model of 7-DOF elevator is established. The parameters of the elevator car system in the figure are shown in Table 1.
Longitudinal vibration 7-DOF model of high-speed elevator car system.
Symbol and physical meaning of active control model.
Symbol
Description
Symbol
Description
Where is the electromagnetic actuator, and its simplified circuit is shown in the equivalent circuit diagram of u attached in Figure 1. is the voltage, is the back electromotive force, is the electromagnetic reaction force generated by , and is the self-inductance coefficient. The relationship between them can be expressed as follows:
where is the output torque of the permanent magnet motor, is the equivalent torque, is the guide rail in the electromagnetic actuator, and and are known constants. can be obtained from equation (2), where is a known constant. and are obtained from the steel wire rope stiffness in series.
According to Lagrange equation, the vibration differential equation of the system is obtained as follows:
The kinetic energy of the system is expressed as follows:
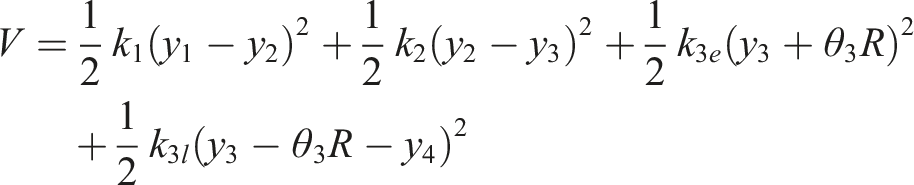
Potential energy of the system is expressed as follows:
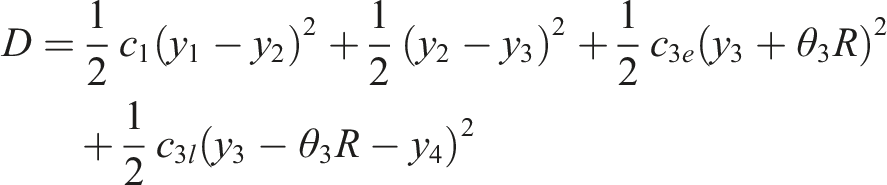
Energy consumption of the system is expressed as follows:
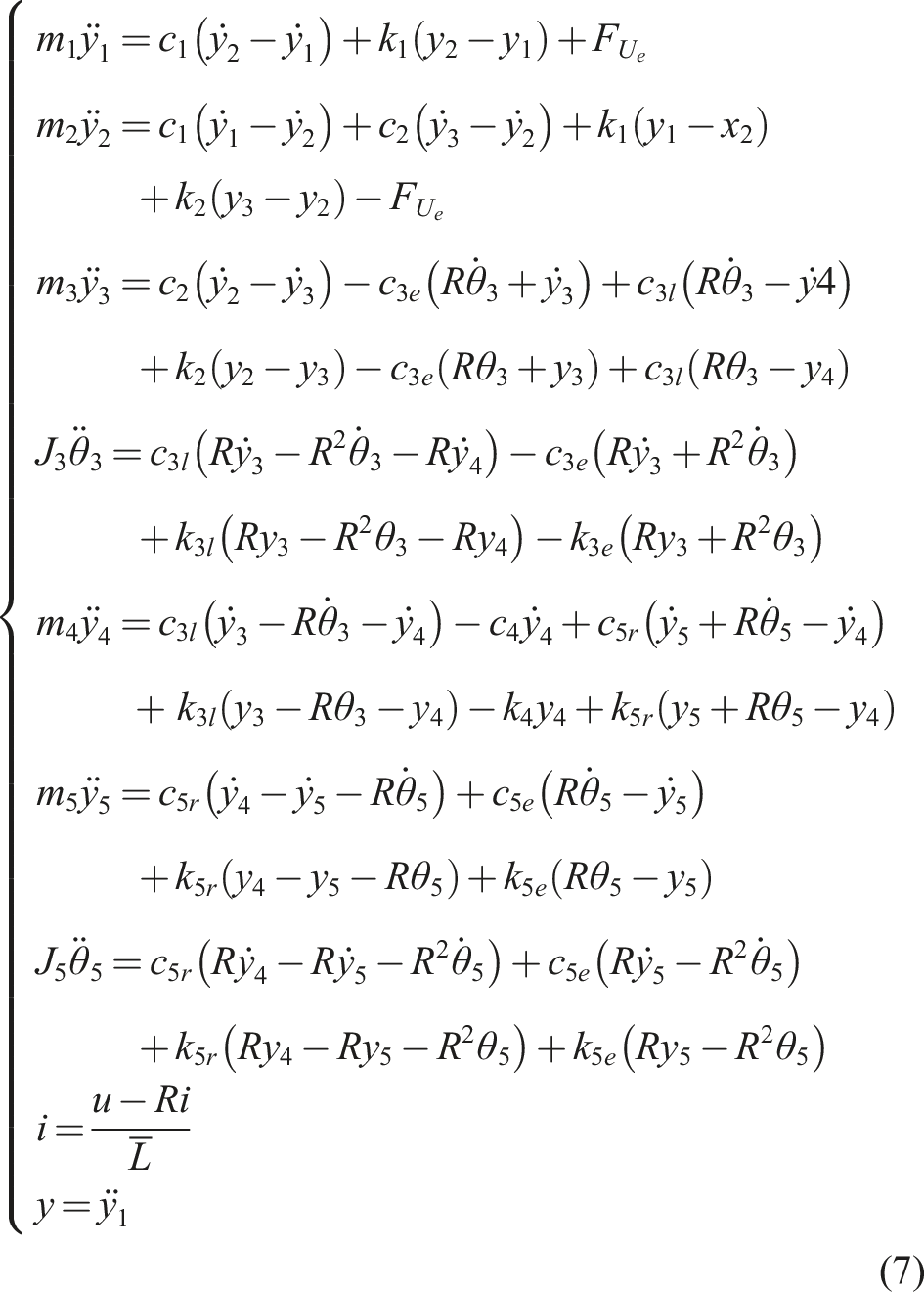
According to equations (3)–(6), the system dynamics equation is obtained as formula (7):
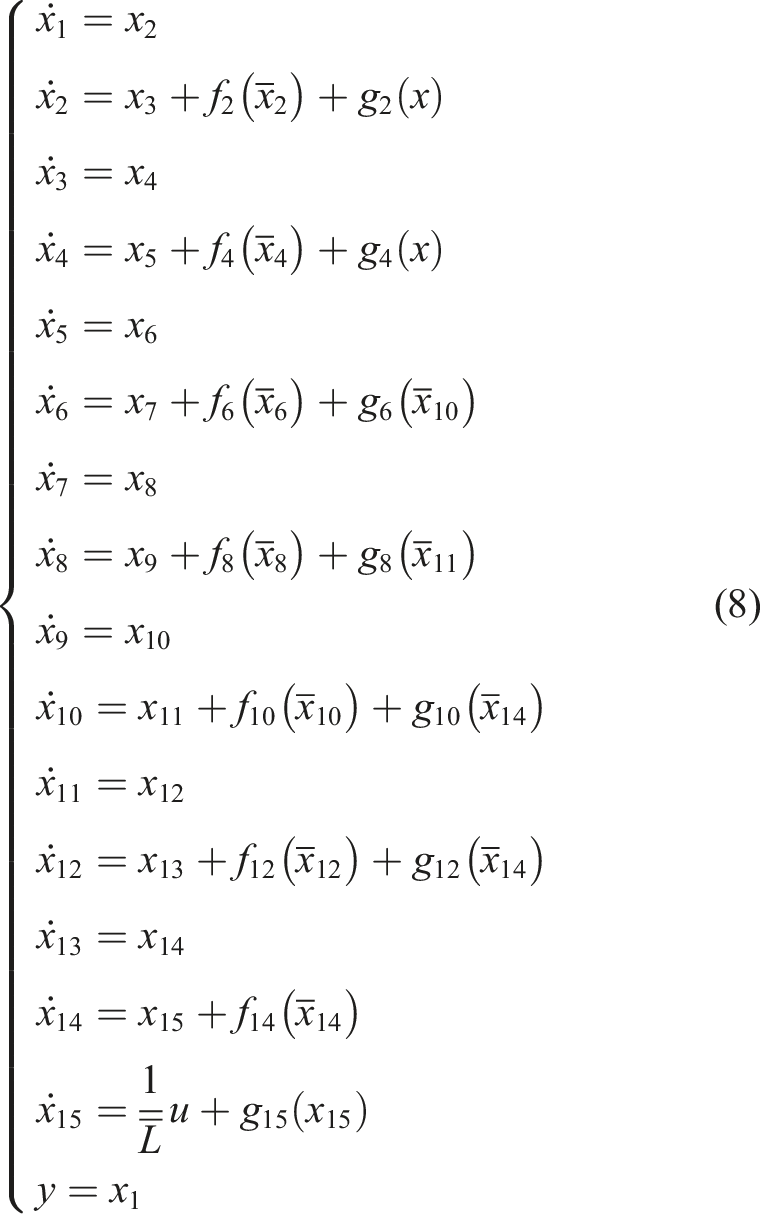
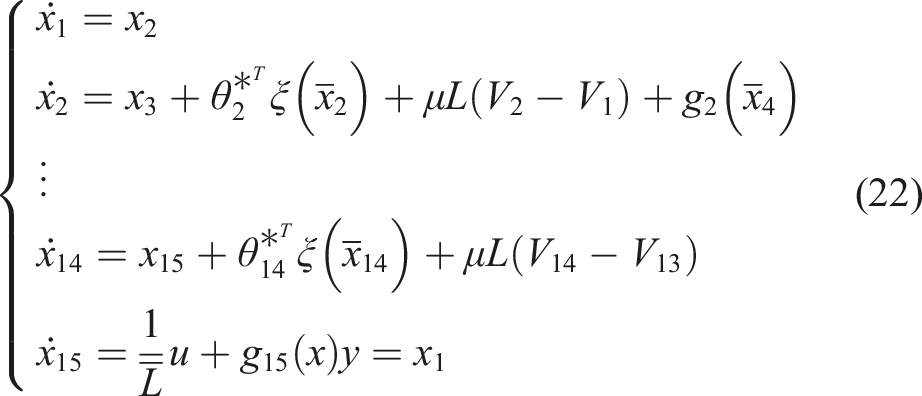
In formula (7), and are the input and output of the system, respectively. As we adopt the adaptive backstepping inverse optimal control method, the system dynamics equation must be transformed into the form of system (8). By introducing the variable substitution , , , , , , , , , , , , , , and , the elevator longitudinal vibration system (LVSH) can be expressed in the form of equation (8):
where , ∼ , and are in the appendix. Since all stiffness and damping ∼ of the system are unknown, B is an unknown nonlinear function.
Since the elevator car has a maximum load capacity, the traction force within the system is unknown and bounded. The nonlinear functions ∼ are part of the sum of these forces, respectively, belonging to general perturbations in physical systems, which are usually assumed to be bounded (Chen, 2005).
2.2. Fuzzy logic system
An FLS consists of a knowledge base, a fuzzer, a fuzzy inference engine, and a defuzzifier. The knowledge base of an FLS is a series of fuzzy if-then rules of the form:
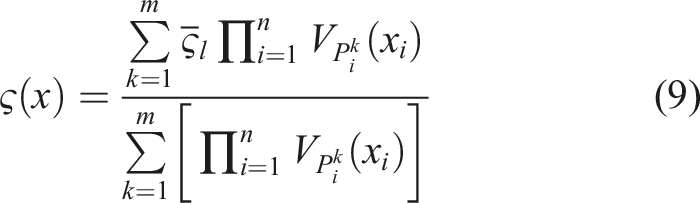
:If is and is and…and is , Then is , …, .where is the input of FLS, is the output of FLS, and are fuzzy sets whose fuzzy membership functions are and , respectively, and is the number of rules. The mathematical expression of FLS (Chen, 2005) is as follows:
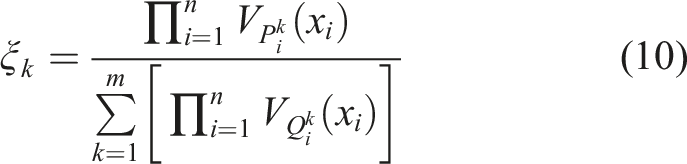
where , and the fuzzy basis function is defined as follows:
assuming and , FLS (9) can be expressed as follows:
(Liu et al., 2017): Let be a continuous function defined on the set Ω, then for any constant δ > 0, there is an FLS (4) such that
2.3. Inverse optimal control design principle
Consider a nonlinear system as follows:
where
where is a control Lyapunov function, is a class function whose derivative exists and is also a class function, represents the Legendre–Fenchel transform, , , (), , , and
(Krstic and Tsiotras, 1999): Assuming that there is a matrix-valued function that satisfies for all , the static-state feedback control input is as follows:
To ensure the global asymptotic stability of the system (13) with respect to , the control input is as follows:
For any , the inverse optimal gain allocation problem of system (13) is solved by minimizing the cost functional
For any , where is a set of locally bounded functions of
From Krstic and Tsiotras (1999), the cost functional (18) is known as the differential game problem of the system (13) and is also described as the worst-case optimal control. System (12) is the HJB equation of the system (6) with a function related to , the parameter represents the design degree of freedom, and the parameter indicates that the inverse optimal control rate is the same for different cost functions in the whole family.
3. Fuzzy adaptive backstepping design controller
In this section, first, a fuzzy state observer is designed to estimate the unmeasured state of an HLVS; then, an adaptive backstepping design is performed on the constructed state observer and auxiliary system (16), and an inverse optimal control scheme is proposed.
3.1. Establish fuzzy state observer and auxiliary system
According to Lemma 1, the nonlinear function can be approximated by FLS and expressed in the following form:
where is the ideal weight and is the bounded fuzzy approximation error. Then through (20), the system (8) can be expressed as follows:
By Lemma 2, set , then there is where is an arbitrary constant, and the auxiliary system of system (21) can be expressed as follows:
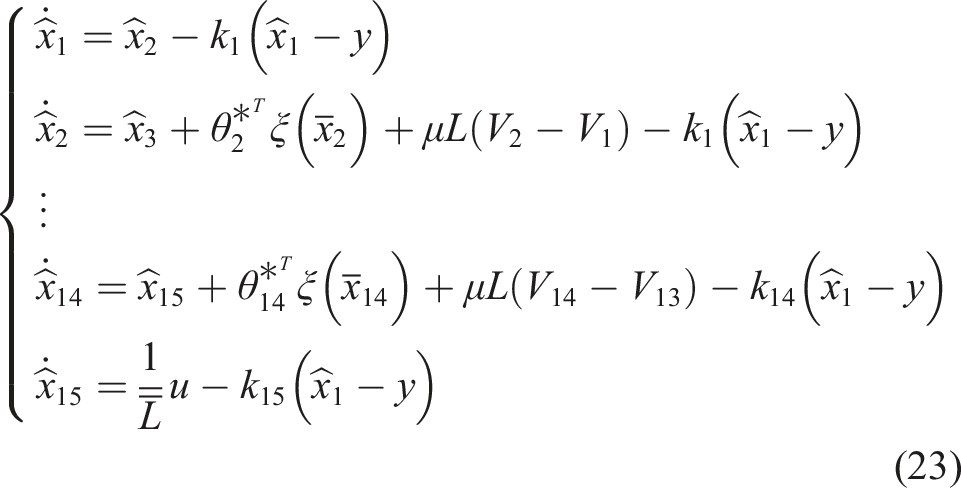
The fuzzy state observer of the auxiliary system (22) is designed as follows:
where is the control Lyapunov function, which will be designed in 3.2, and is the design parameter, whose value is selected so that the matrix satisfies the strict Hurwitz matrix. For a given positive definite matrix , there exists a matrix such that
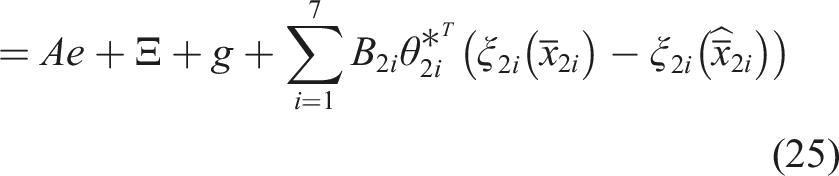
where . Defining the observation error as , we can get the following:
where , and , and .
3.2. Adaptive backstepping design of inverse optimal controller
This section uses the adaptive backstepping design method and the inverse optimal control principle to design the inverse optimal controller based on the fuzzy observer and the auxiliary system (22) to ensure that the auxiliary system (22) and the observation error system (25) are stable.
Define the coordinate transformation as follows:
where is the virtual controller.
Based on Lemma 2 and the abovementioned coordinate transformation, the detailed adaptive backstepping design steps are given as follows:
From equations (22) and (25), we can get the following:
Define CLF as follows:
where CLF is defined as , and its derivative with respect to time is as follows:
from Young’s inequality, we can get the following equation:
Substituting formulas (30) and (31) into (29) yields the following equation:
where , , and is the smallest eigenvalue of matrix . From equations (27) and (28), the derivative of V with respect to time is as follows:
from Yang’s inequality
Substituting formula (35) into (34) yields the following equation:
where .
Design the virtual control function as follows:
where is the design parameter.
According to formulas (22) and (26), we can get the following equation:
where .
Define CLF as follows:
where is a design parameter. According to equations (38) and (39), the derivative of with respect to time is as follows:
from Yang’s inequality
Substituting formulas (41) and (42) into (40) yields the following equation:
where and .
Design the virtual control function and the adaptive law as follows:
where and are the design parameters.
Step: According to formulas (22) and (26), we can get the following equation:
where .
Define CLF as follows:
According to equations (46) and (47), the derivative of V with respect to time is as follows:
from Yang’s inequality
Substituting formula (49) into (48) yields the following equation:
where and .
Design the virtual control function as follows:
where is the design parameter.
Step: According to formulas (22) and (26), we can get the following equation:
where .
Define CLF as follows:
where is the design parameter. According to equations (52) and (53), the derivative of with respect to time is as follows:
from Yang’s inequality
Substituting formulas (55) and (56) into (54) yields the following equation:
where and .
The virtual control function and the adaptive law are designed as follows:
where and are the design parameters.
According to formulas (22) and (26), we can get the following equation:
Define CLF as follows:
where is the design parameter. According to equations (60) and (61), the derivative of with respect to time is as follows:
because , , and when , the last two terms of equation (62) are equal to zero. Therefore, according to the mean value theorem, there exists a smooth function that satisfies the following equation:
Then can be further obtained as follows:
where , , , and .
Based on the inverse optimal principle and according to formula (64), the controller is designed as follows:
where is the design parameter, and
according to Lemma 2, the actual controller of the design system (8) is as follows:
where represents the design freedom.
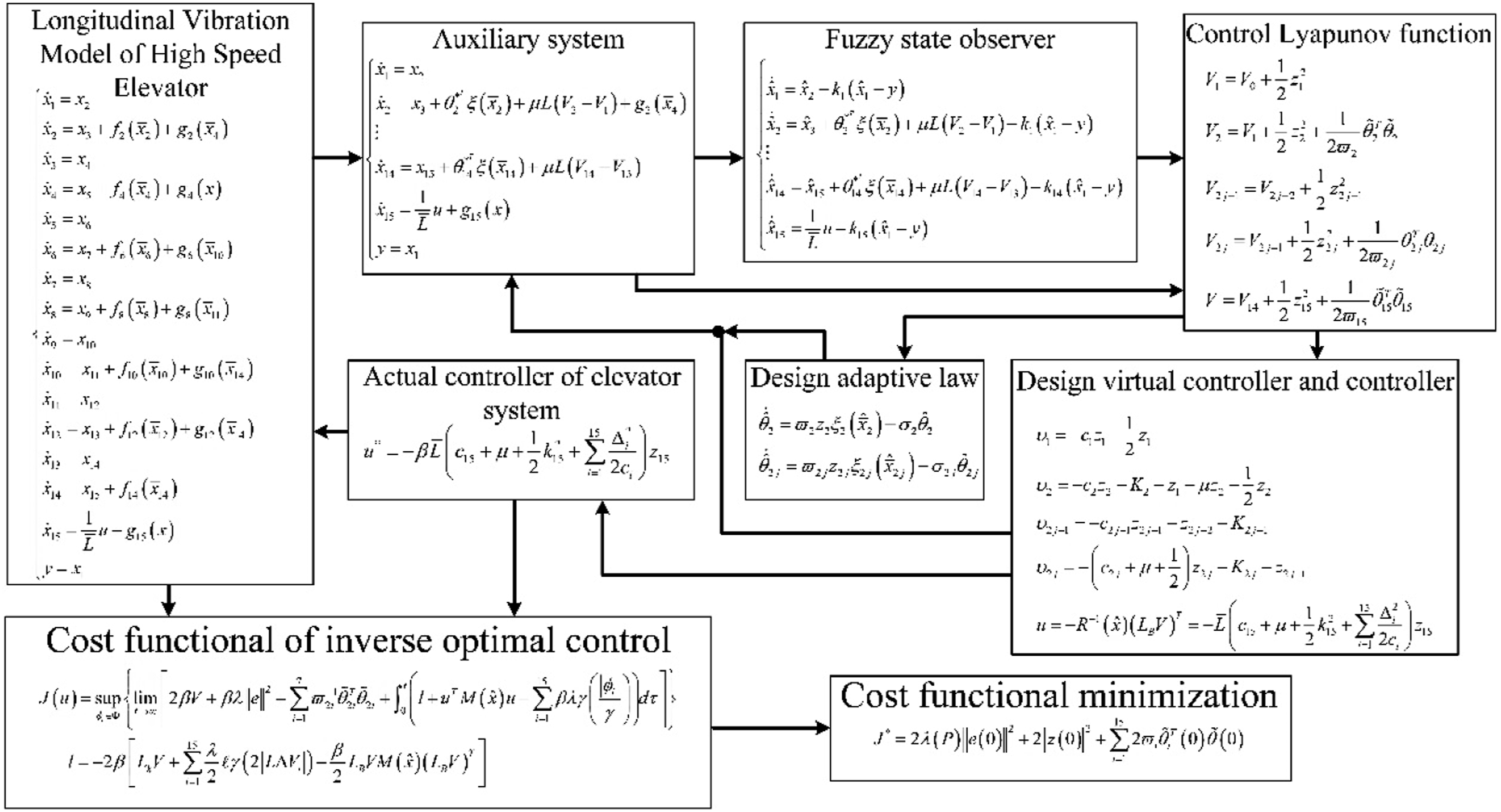
The control strategy (67) not only ensures that the auxiliary system (22) is semi-globally uniform and ultimately bounded but also ensures the input state stability of the system (8) and finally realizes the inverse optimization of the target, that is, to minimize the target functional. The flow of the fuzzy adaptive backstepping inverse optimal control scheme is shown in Figure 2.
Flow of the fuzzy adaptive backstepping inverse optimal control scheme.
4. Stability analysis
This section gives the stability analysis of HLVS and the performance analysis of the proposed fuzzy adaptive backstepping inverse optimal control scheme and proves that ① the controller (67), the fuzzy state observer (23), the virtual controllers (37), (44), (51), and (58), and the adaptive laws (45) and (59) make systems (22) and (25) semi-globally consistent and ultimately bounded; ② system (8), the inverse optimal objective functional, reaches a minimum.
① Order
Then formula (64) can be transformed into the following form:
Multiply both sides of formula (69) by to obtain the following equation:
Simultaneously integrating both sides of formula (70) in the interval, we get the following equation:
Invoking formula (62), the following inequality holds:
Equation (72) can be alternatively expressed as follows:
Obviously, can be bounded by equation (73) and then the controller is bounded. Similarly, it follows from equations (62) and (71) that the adaptive law is bounded. Due to , the available state is bounded, and similarly, all available states are bounded. Therefore, it is proved that systems (22) and (25) are semi-globally uniform and ultimately bounded.
② The target functional is defined as follows:
where
According to the LaSalle–Yoshizawa invariant set theorem, there exists a continuous positive definite function satisfying the following inequality:
From formula (76), we can get the following equation:
Because , and , and is a class function, is derived. Substituting formula (75) into (74) yields the following equation:
To obtain the link between the controller (65) of the auxiliary system (22) and the controller (67) of the system (8), based on the Legendre–Fenchel transformation, equation (78) can be transformed into the following:
To reflect the purpose of inverse optimal control, it is necessary to reflect the relationship between and , and formula (79) can be transformed into the following form:
where
According to the properties of Legendre–Fenchel transformation, formula (81) can be transformed into the following form:
further available
Then when , , and at the same time we can get
Substitute formulas (67) and (85) into (80), let and , then the objective functional (74) obtains the minimum value, which is as follows:
Then it is proved that the inverse optimal objective function of the system (8) reaches the minimum.
5. Numerical simulation and analysis
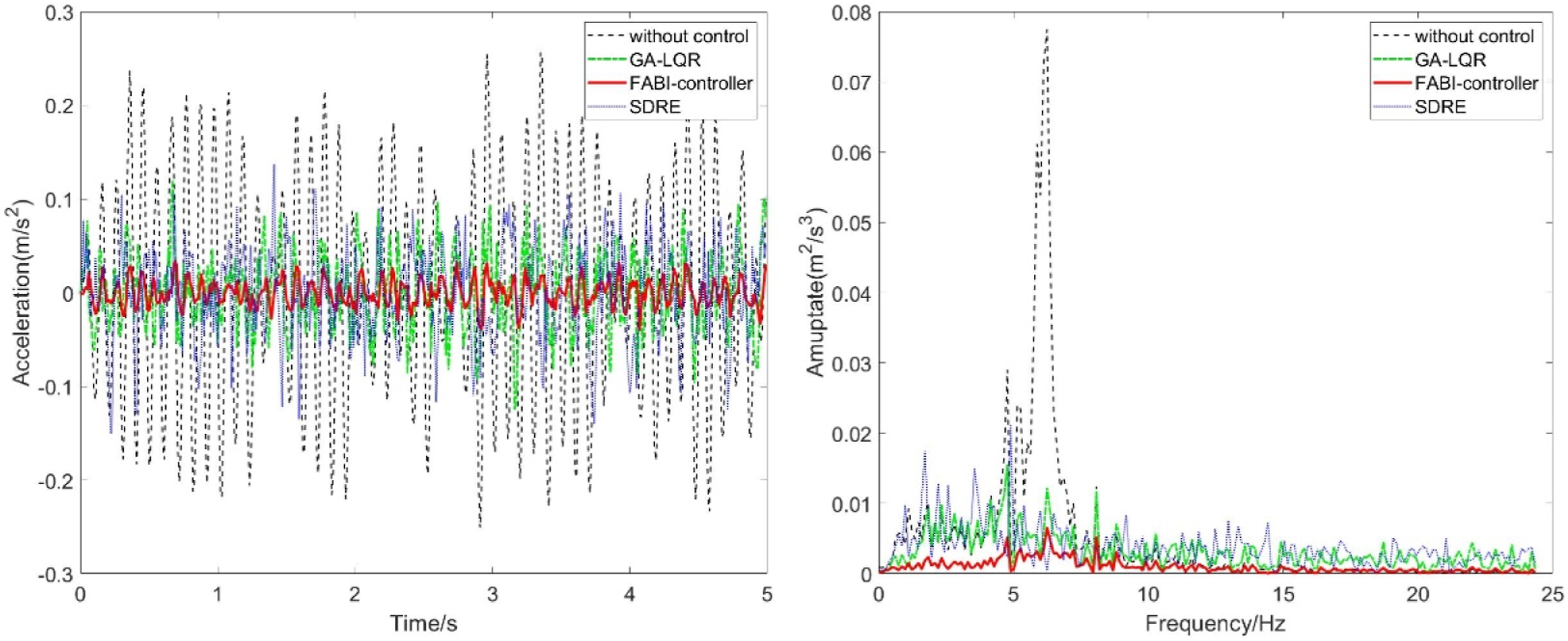
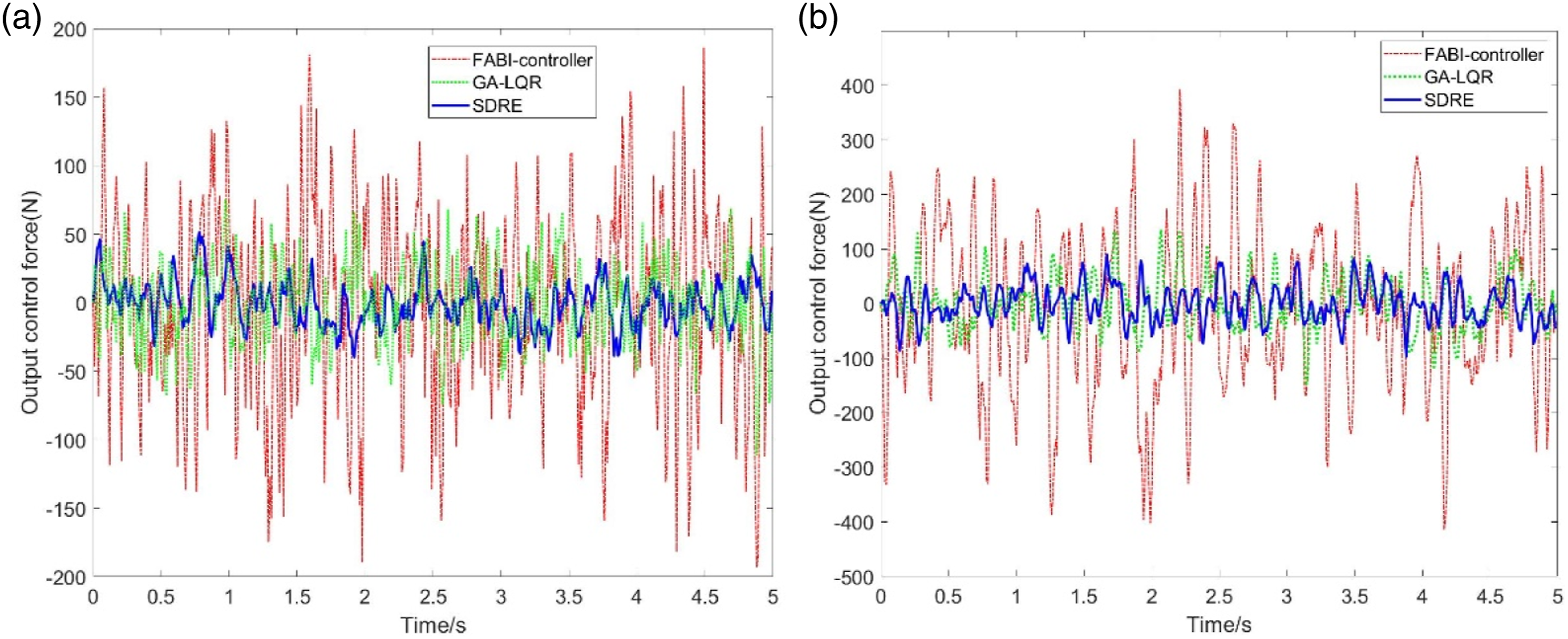
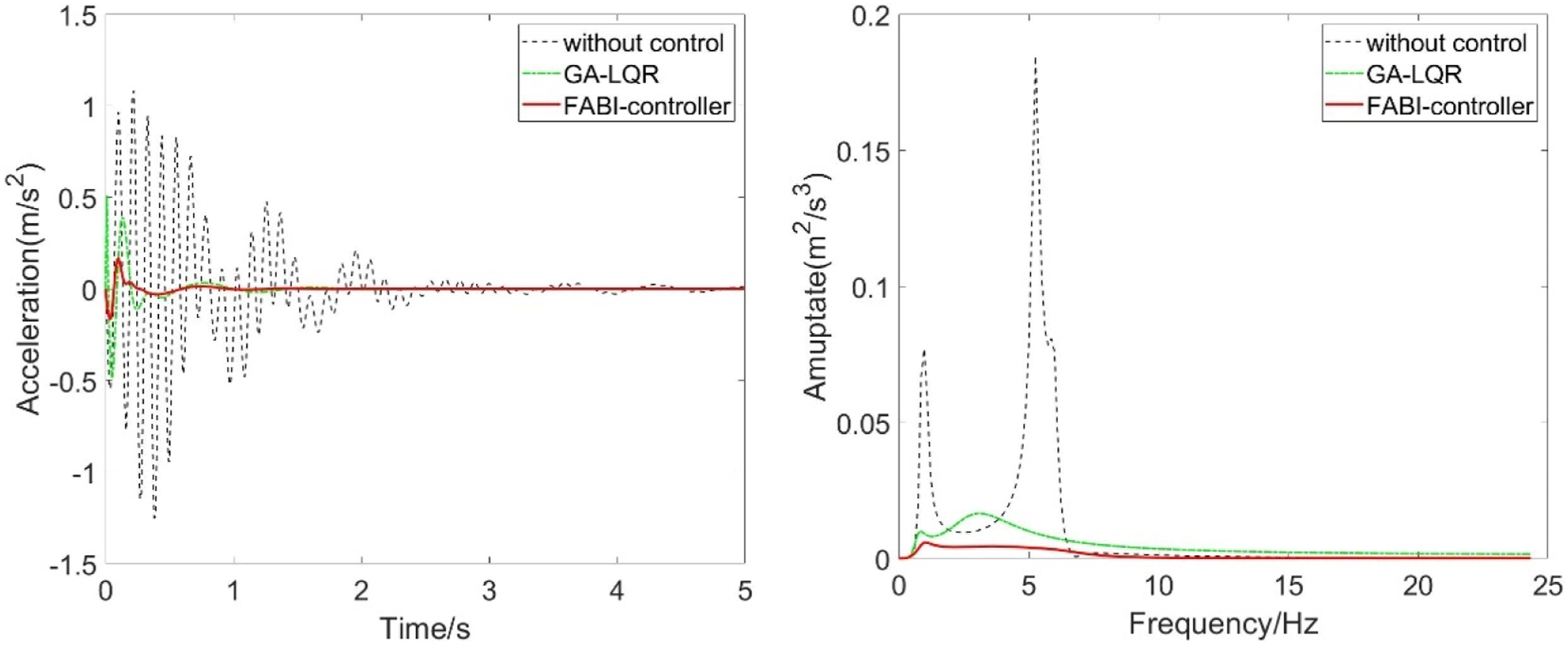
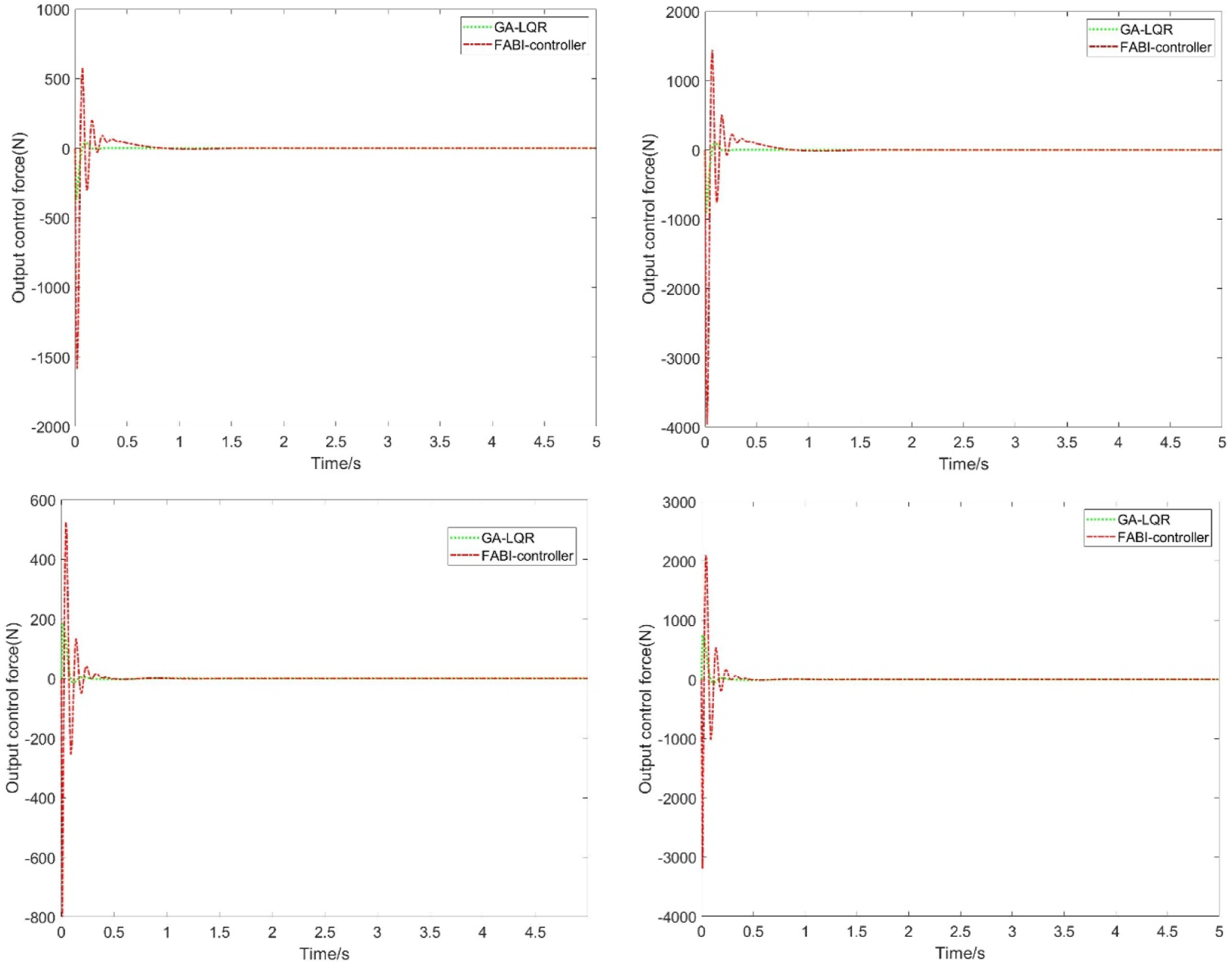
In this paper, the 7m/s high-speed elevator is taken as the simulation experimental object for numerical simulation analysis. The constant speed running phase (Peng et al., 2020; Sandilo and Horssen, 2014) and the free oscillation phase (Peng et al., 2018; Xu et al., 2022) after emergency braking of the high-speed elevator are selected for numerical simulation analysis under no-load and heavy load conditions, respectively, (the change range of the car mass in this section is defined as ).To further embody the superiority of the FABI-controller performance, the GA-LQR controller (Li et al., 2022) and elementary SDRE controller (Santo et al., 2016) are used as the comparison controllers. The numerical simulation results of the horizontal vibration of the car system at different stages and working conditions are shown in Figures 3–10.
Output control force under two operation modes and two working conditions—(c) uplink no-load; (b) uplink full-load; (e) downlink no-load; (f) downlink full-load.
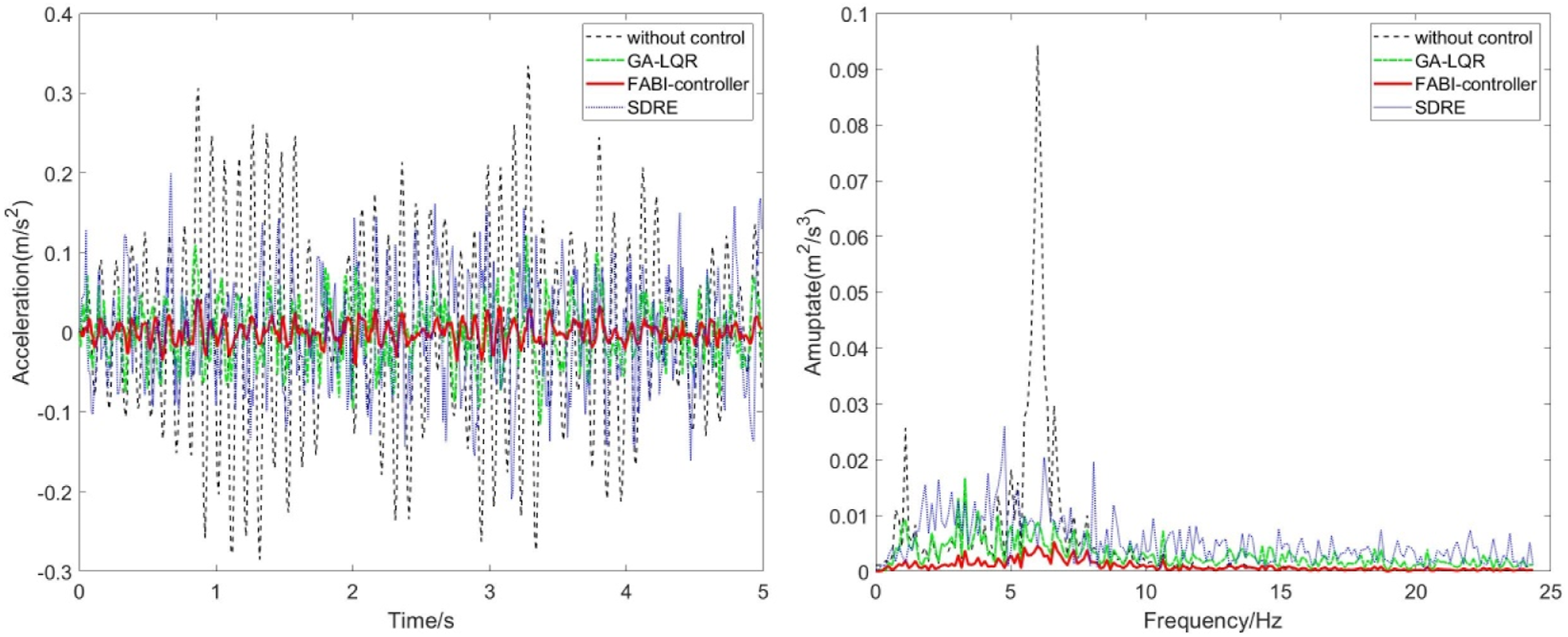
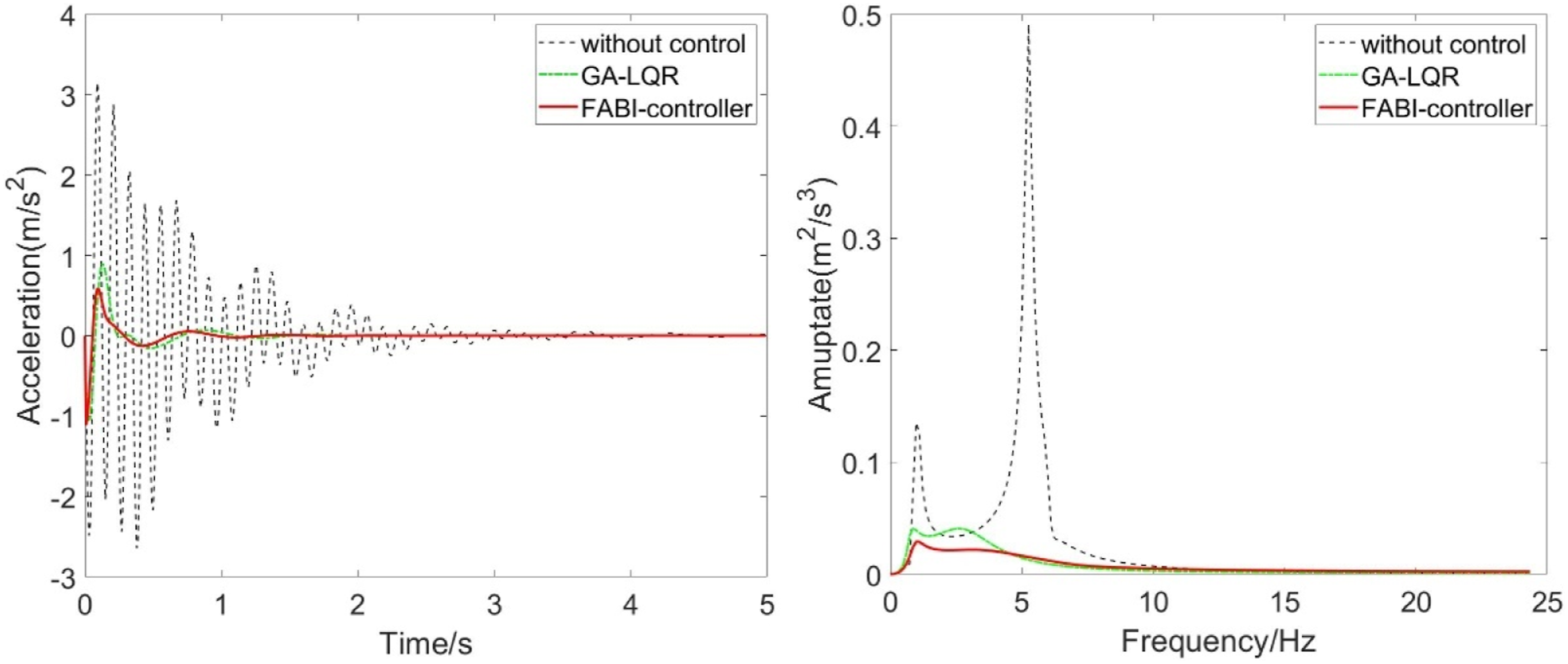
5.1. Numerical simulation analysis of longitudinal vibration acceleration of car system during uniform speed operation under different operating conditions
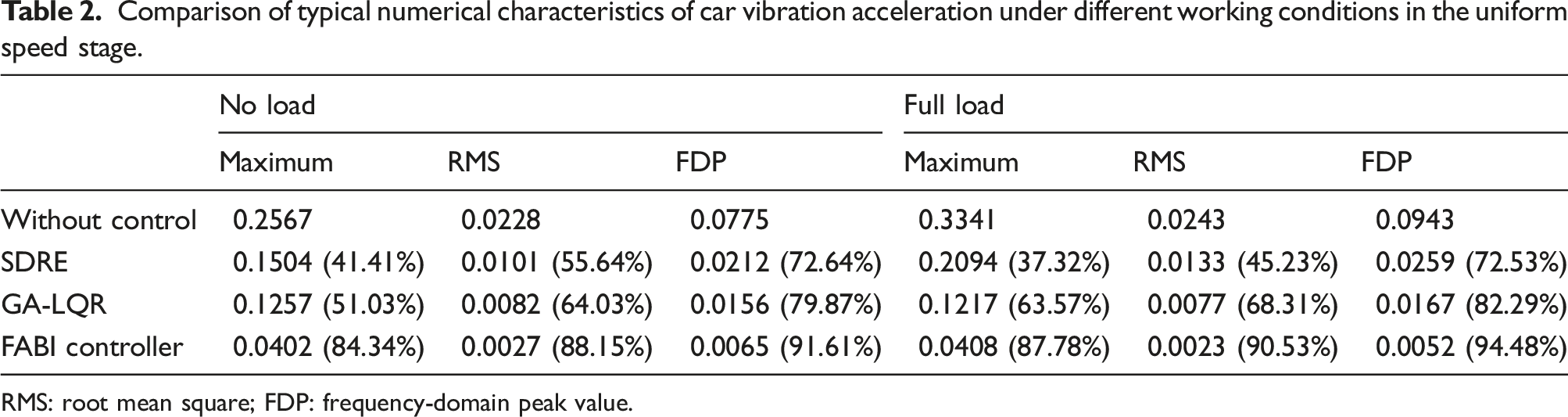
To illustrate the effectiveness of the proposed controller, refer to international standards ISO 2631-1 and ISO 2631-2, the typical digital characteristics (maximum longitudinal vibration acceleration [maximum], root mean square [RMS], and frequency-domain peak value [FDP]) of the longitudinal vibration acceleration of the car are compared and analyzed. The comparison results are shown in Table 2. In this table, under no-load condition, compared with without control, the maximum, RMS, and FDP of the car are reduced by 84.34%, 88.15%, and 91.61%, respectively. Under full-load condition, the typical numerical characteristics of the horizontal vibration acceleration at the center of the car floor are reduced by 87.78%, 90.53%, and 94.48%, respectively. It can be concluded that under the two working conditions, compared with the other two states, the car vibration peak value under the control of FABI controller is significantly attenuated, and the vibration fluctuation amplitude is correspondingly reduced. Similarly, through the comparative analysis of frequency-domain response curves, it can be concluded that the longitudinal vibration amplitude in the low-frequency range where FABI controller has a more serious impact on ride comfort is reduced more.
Comparison of typical numerical characteristics of car vibration acceleration under different working conditions in the uniform speed stage.
No load
Full load
Maximum
RMS
FDP
Maximum
RMS
FDP
Without control
0.2567
0.0228
0.0775
0.3341
0.0243
0.0943
SDRE
0.1504 (41.41%)
0.0101 (55.64%)
0.0212 (72.64%)
0.2094 (37.32%)
0.0133 (45.23%)
0.0259 (72.53%)
GA-LQR
0.1257 (51.03%)
0.0082 (64.03%)
0.0156 (79.87%)
0.1217 (63.57%)
0.0077 (68.31%)
0.0167 (82.29%)
FABI controller
0.0402 (84.34%)
0.0027 (88.15%)
0.0065 (91.61%)
0.0408 (87.78%)
0.0023 (90.53%)
0.0052 (94.48%)
RMS: root mean square; FDP: frequency-domain peak value.
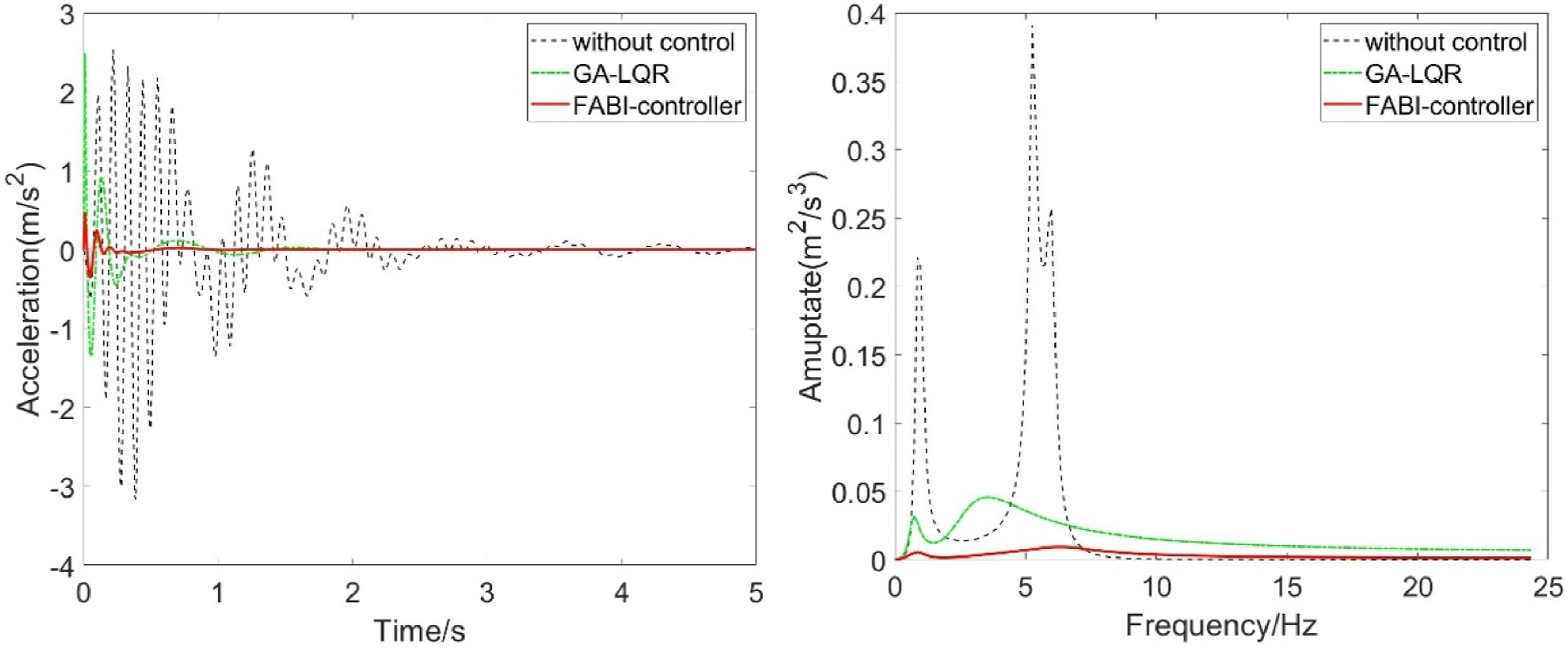
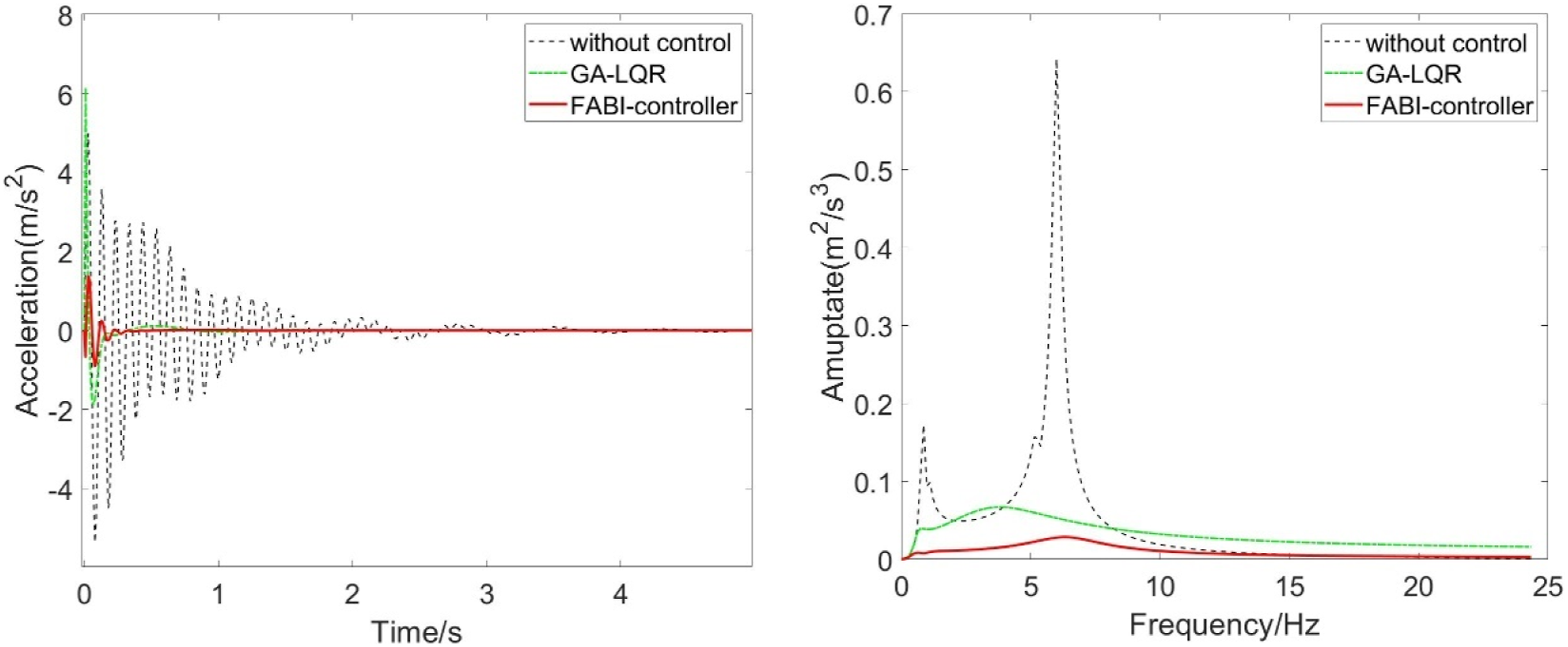
5.2. Numerical simulation analysis of longitudinal vibration acceleration of car system in emergency braking stage under different working conditions
To illustrate the control effect of the proposed FABI controller on the emergency braking stage, the typical digital characteristics of the elevator’s up section and down section under two working conditions are compared and analyzed. The comparison results are shown in Table 3. In this table, compared with without control, in the uplink emergency braking phase, the maximum and FDP of the car at no-load stage are reduced by 85.41% and 97.67%, respectively, and the maximum longitudinal acceleration and frequency-domain peak value of the car at full-load stage are reduced by 74.35% and 95.57%, respectively; in the downlink emergency braking phase, maximum and FDP of the car at no load are reduced by 86.79% and 96.85%, respectively, and maximum and FDP of the car at full load are reduced by 64.91% and 94.11%, respectively. It can be concluded that in the two working conditions, no matter in the elevator’s ascending section or the descending section, the car under the control of FABI controller quickly suppressed the free vibration of the car caused by emergency braking, the vibration peak value is significantly attenuated, and there is also a relatively large reduction in the vibration convergence. Similarly, through the comparative analysis of frequency-domain response curves, it can be concluded that the longitudinal vibration amplitude in the low-frequency range where FABI controller has a more serious impact on ride comfort and elevator safety is reduced more.
Comparison of typical numerical characteristics of car vibration acceleration under different working conditions during emergency braking.
Up emergency braking stage
Down emergency braking stage
No load
Full load
No load
Full load
Maximum
FDP
Maximum
FDP
Maximum
FDP
Maximum
FDP
Without control
3.1672
0.3911
5.3613
0.6416
1.2521
0.1845
3.1443
0.4908
GA-LQR
2.4932 (21.28%)
0.0456 (88.34%)
6.1486 (−14.68%)
0.0667 (89.61%)
0.5087 (59.37%)
0.0165 (91.05%)
1.0171 (67.65%)
0.0411 (91.62%)
FABI controller
0.4617 (85.41%)
0.0091 (97.67%)
1.3748 (74.35%)
0.0285 (95.57%)
0.1654 (86.79%)
0.0058 (96.85%)
1.1036 (64.91%)
0.0289 (94.11%)
FDP: frequency-domain peak value.
To sum up, the time–frequency response and typical digital characteristics of the longitudinal vibration acceleration of the car under no-load and full-load conditions in the constant speed stage and the emergency braking stage are compared and analyzed. It is verified that the FABI controller proposed in this paper can effectively reduce the peak value of longitudinal vibration acceleration of the car system and reduce the frequency of low-frequency vibration amplitude. Since the longitudinal vibration can be suppressed in the constant speed stage, the free vibration range can be quickly converged and the longitudinal vibration can also be suppressed in the emergency braking stage. Thus, the ride comfort and safety of the high-speed elevator are improved.
6. Conclusion
1. Based on the active control model of longitudinal vibration of high-speed elevator car system with seven degrees of freedom, fuzzy state observer and auxiliary system are designed to monitor and estimate unknown nonlinear and unmeasurable states. Combining the adaptive technology with backstepping technology and then following the inverse optimal control principle designs, the adaptive fuzzy backstepping inverse optimal controller (FABI controller), which realizes the inverse optimization of the control objective, verifies the solvability of the inverse optimal allocation problem through stability analysis and realizes the global optimal control.
2. Considering the constant speed and emergency braking phases of the high-speed elevator, the time–frequency response of the longitudinal vibration acceleration of the car system under without control, SDRE controller, GA-LQR controller, and FABI-controller is compared and analyzed under no-load and full-load conditions. The results show that the proposed FABI controller reduces the typical values of vibration acceleration by more than 60% than that without control, which is far better than GA-LQR control. Therefore, the simulation results fully prove the effectiveness of the control strategy proposed in this paper.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study is supported by the Natural Science Foundation of Shandong Province (ZR2021ME210, ZR2021ME245).
ORCID iD
Ruijun Zhang
Appendix
References
1.
ArrasateXKaczmarczykSAlmandozG, et al. (2014) The modelling, simulation and experimental testing of the dynamic responses of an elevator system. Mechanical Systems and Signal Processing42(1–2): 258–282. DOI: 10.1016/j.ymssp.2013.05.021
2.
ChenPC (2005) Adaptive multiple-surface sliding control of hydraulic active suspension systems based on the function approximation technique. Journal of Vibration and Control11(5): 685–706. DOI: 10.1177/1077546305052788
3.
DoKD (2019) Inverse optimal control of stochastic systems driven by Lévy processes. Automatica107: 539–550. DOI: 10.1016/j.automatica.2019.06.016
4.
DoKD (2020) Stability in probability and inverse optimal control of evolution systems driven by levy processes. IEEE-CAA Journal of Automatica Sinica7(2): 15. DOI: 10.1109/JAS.2020.1003036
5.
HeQJiaTZhangR, et al. (2022) Adaptive sliding mode control with fuzzy adjustment of switching term based on the Takagi-Sugeno model for horizontal vibration of the high-speed elevator cabin system. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science236(9): 4503–4519. DOI: 10.1177/09544062211053191
6.
KrsticMLiZ-H (1998) Inverse optimal design of input-to state stabilizing nonlinear controllers. IEEE Transactions on Automatic Control43: 336–350.
7.
KrsticMTsiotrasP (1999) Inverse optimal stabilization of a rigid spacecraft. IEEE Transactions on Automatic Control44(5): 1042–1049.
8.
LiLTianQJiaT, et al. (2022) Stepping quantum genetic algorithm-based LQR control strategy for lateral vibration of high-speed elevator. Automatisierungstechnik70(7): 623–634. DOI: 10.1515/auto-2021-0154
9.
LiuHPanYLiS, et al. (2017) Adaptive fuzzy backstepping control of fractional-order nonlinear systems. IEEE Transactions on Systems Man & Cybernetics Systems47(8): 2209–2217. DOI: 10.1109/TSMC.2016.2640950
10.
MeiDDuXChenZ (2009) Optimization of dynamic parameters for a traction-type passenger elevator using a dynamic byte coding genetic algorithm. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science223(3): 11. DOI: 10.1243/09544062JMES1149
11.
OkiRVladiJKljajinM, et al. (2021) Dynamic modelling, experimental identification and computer simulations of non-stationary vibration in high-speed elevators. Journal of Mechanical Engineering67: 61–68. DOI: 10.5545/sv-jme.2020.7179
12.
PengQLiZYuanH, et al. (2018) A model-based unloaded test method for analysis of braking capacity of elevator brake. Advances in Materials Science and Engineering2018: 1–10. DOI: 10.1155/2018/8047490
13.
PengQJiangAYuanH, et al. (2020) Study on theoretical model and test method of vertical vibration of elevator traction system. Mathematical Problems in Engineering2020: 8518024. DOI: 10.1155/2020/8518024
14.
SandiloSHHorssenWV (2014) On variable length induced vibrations of a vertical string. Journal of Sound & Vibration333(11): 2432–2449. DOI: 10.1016/j.jsv.2014.01.011
15.
SantoDBalthazarJTussetA, et al. (2016) On nonlinear horizontal dynamics and vibrations control for high-speed elevators. Journal of Vibration & Control24(5): 825–838. DOI: 10.1177/1077546316667324
16.
WangJMiroslavK (2021) Adaptive event-triggered PDE control for load-moving cable systems. Automatica129: 109637. DOI: 10.1016/j.automatica.2021.109637
17.
WangGWangYJinX, et al. (2016) Weight-transducerless rollback mitigation adopting enhanced MPC with extended state observer for direct-drive elevators. IEEE Transactions on Power Electronics31(6): 4440–4451. DOI: 10.1109/TPEL.2015.2475599
18.
WangHZhangMZhangR, et al. (2021) Research on predictive sliding mode control strategy for horizontal vibration of ultra-high-speed elevator car system based on adaptive fuzzy. Measurement and Control54: 3–4. DOI: 10.1177/00202940211003926
19.
XuPPengQJinF, et al. (2022) Experimental study on damping characteristics of elevator traction system. Advances in Mechanical Engineering14(3): 1–12. DOI: 10.1177/16878132221085434
20.
ZhangQYangZWangC, et al. (2019) Intelligent control of active shock absorber for high-speed elevator car. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science233(11): 3804–3815. DOI: 10.1177/0954406218810045
21.
ZhangQHouTZhangRJ, et al. (2020) Time-Varying characteristics of the longitudinal vibration of a high-speed traction elevator lifting system. International Journal of Acoustics and Vibration25: 153–161. DOI: 10.20855/ijav.2020.25.21529
22.
ZhangHZhangRHeQ, et al. (2021a) Variable universe fuzzy control of high-speed elevator horizontal vibration based on firefly algorithm and backpropagation fuzzy neural network. IEEE Access9: 57020–57032. DOI: 10.1109/ACCESS.2021.3072648
23.
ZhangQHouTJingH, et al. (2021b) Analysis of longitudinal vibration acceleration based on continuous time-varying model of high-speed elevator lifting system with random parameters. Mechanics & Industry22: 28. DOI: 10.1051/meca/2021027