In this article, a new observer design technique is proposed for the general affine class of fractional-order nonlinear multi-input/multi-output (MIMO) systems. This study is presented based on the differential mean value theorem. One significant characteristic of the suggested approach is that the nonlinear dynamic of observer error is converted into a linear parameter-varying system. Stability and convergence of observation error are shown using the Lyapunov direct method leading to feasibility and existence of a solution for some linear matrix inequalities. The performance and efficacy of the proposed method are evaluated through some illustrated simulations.
Over the past three centuries, the role of fractional calculus has received increasing attention across several disciplines, and it has been vigorously challenged by many researchers (Dabiri and Butcher, 2019). Recently, its employment in physics and engineering has attracted considerable interest. For example, heat conduction (Jenson and Jeffreys, 1977), transmission line model (Chen and Friedman, 2005), biological and financial systems (Laskin, 2000), dielectric and electrode–electrolyte polarization (Ichise et al., 1971; Sun et al., 1984), and diffusion waves (Ahmad and Sayed, 1996) can be stated for its applications.
Most control systems use state variables of the plants in their control policy. Unfortunately, in practice, it is not possible to access or measure all state variables of an under-control system. Therefore, for implementing such controllers, it is required to estimate unmeasurable states truly. An observer can accomplish this aim. So far, several linear and nonlinear observers have been widely developed by researchers to estimate unmeasurable states of various classes in nonlinear dynamic systems (Chen and Saif, 2012; Dadras and Momeni, 2011; Khalifa and Mabrouk, 2015; Luenberger, 1964). More recent studies on state observers can be found in the literature, such as state feedback control (Gao et al., 2019), fault detection and isolation (Ren-Jie and Jun-Guo, 2022; Su et al., 2016), system monitoring (Anagnostou et al., 2018; Yunlong et al., 2022), observer-based robust adaptive fuzzy control (Ghavidel and Kalat, 2018), and robot manipulator (Yang et al., 2020).
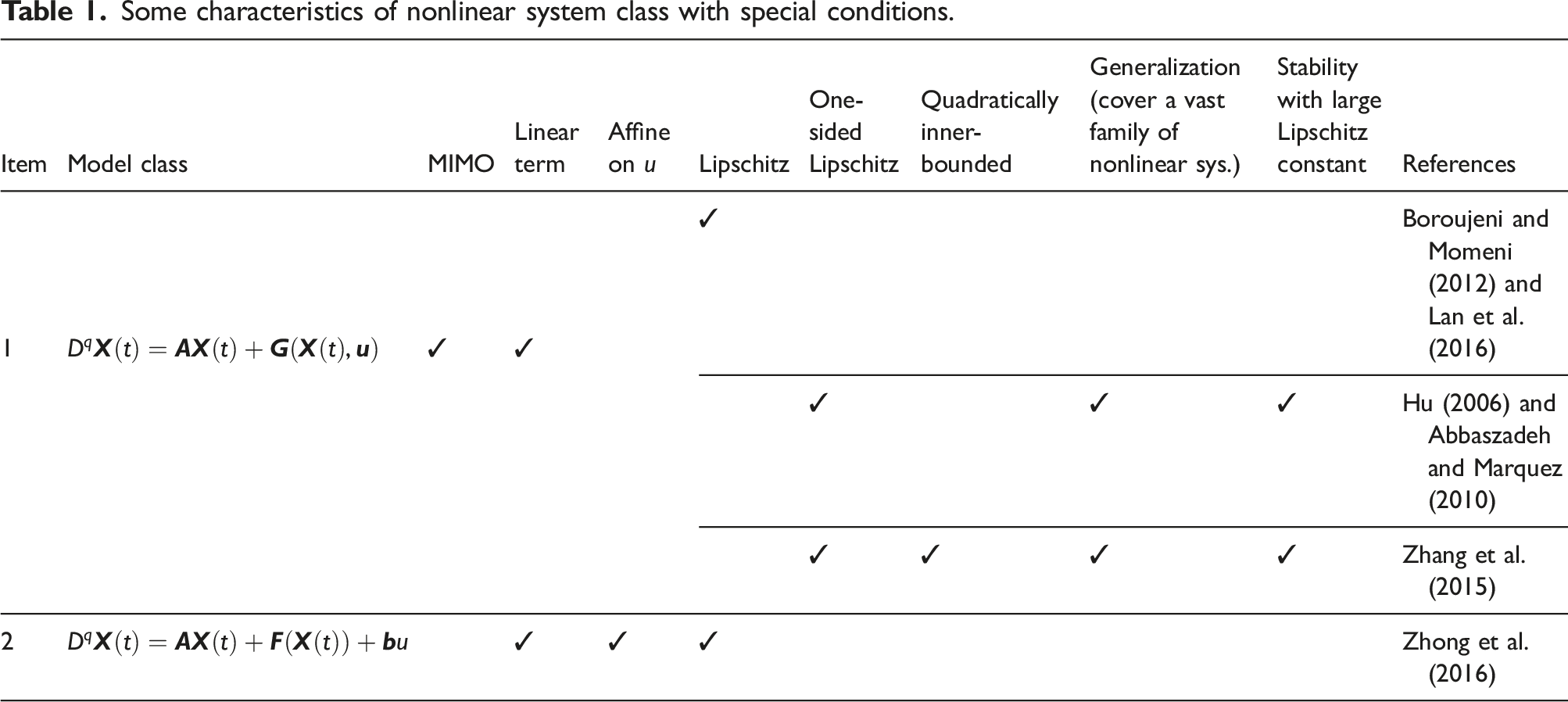
Recently, researchers have paid more attention to fractional-order fields. So, several observer design methods for fractional-order (FO) linear and nonlinear systems have been introduced during the latest years. For example, an observer in the form of FO has been presented in NDoye et al. (2013), applied on a FO linear system with unknown input. Moreover, in Liu and Laleg (2015); Rapaic and Alessandro (2014), adaptive observers have been introduced for a FO linear system. The so-called non-fragile observer for FO nonlinear systems has been studied in Boroujeni and Momeni (2012); Jeong et al. (2006); Lan and Zhou (2013). In the latter studies, the term the fragile or non-resilient observer has been referred to as divergence of estimation error, which may be resulted from a minor disturbance in observer gain. In Hafezi et al. (2020); N’Doye et al. (2013); Senejohnny and Delavari (2012), observer-based synchronization has been suggested for FO chaotic systems. Lipschitz nonlinear systems are a popular class of nonlinear systems considered in some studies (Lan et al., 2016; Zhong et al., 2016). Recently, more attention has been paid to this class of nonlinear systems. Despite their efficacy, the Lipschitz type of nonlinear systems suffers from minor and/or large values of the Lipschitz constants that may render linear matrix inequalities (LMIs) infeasible and cause the designed observer to be unstable (Lan and Zhou, 2013). To overcome this limitation, well-known one-sided Lipschitz condition and quadratically inner-bounded requirement have been introduced in Abbaszadeh and Marquez (2010); Abdullah and Qasem (2019); Hu (2006); Zhang et al. (2015); Zulfiqar et al. (2016). Some characteristics of nonlinear systems with those conditions are listed in Table 1.
Some characteristics of nonlinear system class with special conditions.
Item
Model class
MIMO
Linear term
Affine on
Lipschitz
One-sided Lipschitz
Quadratically inner-bounded
Generalization (cover a vast family of nonlinear sys.)
Recently, some researchers have shown a particular interest in the well-known differential mean value theorem (DMVT), which is less conservative than the methods as mentioned above (Sharma et al., 2016, 2018; Zemouche and Boutayeb, 2009, 2013; Zemouche et al., 2005, 2008). By this theorem, dynamics of observation error with nonlinear terms are converted into linear parameter-varying (LPV) dynamics. Stability analysis of the method is easy, and one can investigate simply using a classical quadratic Lyapunov function and convexity theory. Convergence of estimation states to nominal states is guaranteed by feasibility and existence of a solution for LMI conditions, providing the observer gain.
In the case of observer design, a general affine class of nonlinear FO systems already studied includes systems in the form of , where b is the constant vector (gain of the system input) and is the scalar input. Having this fact in mind, to the best of our knowledge, none of the previous studies have investigated an affine nonlinear single-input/single-output (SISO) or multi-input/multi-output (MIMO) system, in which gain of the system input is a nonlinear function of the states’ vector, that is, a system in the form of . However, in this paper, first of all, a new FO observer is proposed for FO nonlinear MIMO systems in the last mentioned form. Then, using DMVT, the dynamic equation of state observation error is converted into an LPV dynamic system. Finally, observer gains of the proposed method are obtained by suggesting a Lyapunov function and solving some LMI problems, ensuring asymptotic stability and convergence of the observation error.
The rest of this paper is organized as follows. At first, a brief overview of some definitions and properties of fractional calculus is given in Section 2. The problem is stated in Section 3. The fourth section is concerned with the methodology proposed in this paper. The fifth section presents the research findings, focusing on illustrations regarding the performance of the proposed observer through some examples. Finally, a summary and evaluation of the results are presented in the Conclusion section.
2. Preliminaries on fractional calculus
In this section, some definitions, properties, and theorems found in the field of fractional calculus are described. The first definition is a fractional derivative of order of a function , introduced by Riemann–Liouville (Valério et al., 2013)
The second definition is the fractional derivative presented by Caputo (Valério et al., 2013)
where , and Gamma function is defined as .
In particular, if , then
Interestingly, in the latter definition, there is a similarity between the description of the initial conditions for FO equations and integer-order ones (Sharma et al., 2018). Therefore, although researchers suggested various specification of the fractional derivative term, the Caputo derivative definition will be used in this paper.
Notations
Notations and terminologies introduced throughout this paper are as follows:
1. Transpose of matrix will be denoted by .
2. The notation A > 0 (A < 0) for a square matrix means positive definition (negative definition) of matrix A.
3. The convex hull of , denoted by the , is defined as the .
where is the state vector. is a smooth nonlinear function in a vector form. The FO is represented by . Nonlinear system (4) is asymptotically stable if it is found that a Lyapunov function , such that for all .
(Duarte-Mermoud et al., 2014): Consider to be a differentiable function vector and to be a constant matrix in a symmetric positive definite form. Then, the following inequality is satisfied
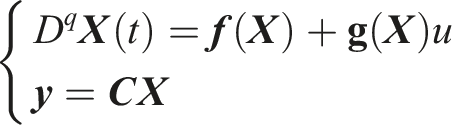
A general affine class of FO nonlinear dynamic systems in the form of state space can be considered as
where is the state vector, is the input, is the output, that is, the measurable output variables of the system, is the matrix with appropriate dimensions, that is, , is the nonlinear function vector, and is the nonlinear function matrix, both of which are supposed to be known and differentiable. The fractional order is represented by .
where is the i-th row of function vector and is the i-th row of column function vector , for . Also, , , , and are defined as
4. Designing the proposed observer
In this section, an observer is proposed for system (7). The observation error dynamic of the proposed method can be evolved as an LPV system by DMVT. Then, a Lyapunov function is introduced to prove the asymptotic convergence of the proposed observer. Stability analysis of the observation error dynamic leads to an LMI problem. Finding a feasible solution for the LMI problem is the final part of this procedure.
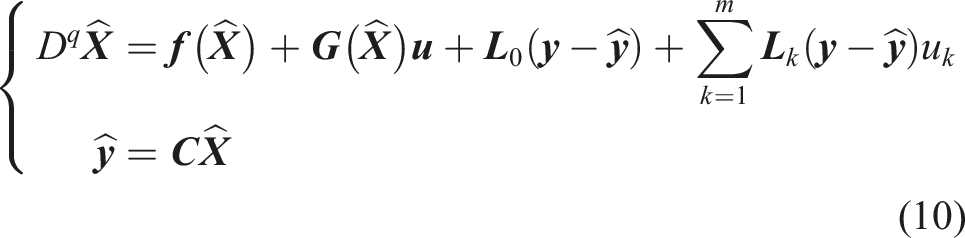
At first, based on the dynamic system introduced by (7), the following FO state observer is proposed
where denotes an estimate of the state . The aim of this study is to determine gain vectors or matrices and () such that, the observation error, that is, , converges to zero asymptotically.
From the definition of the observer error , system (7), and proposed observer (10), the dynamic of the observation error can be written as
For attaining the convergence of error dynamic (11), a Lyapunov function is introduced, and based on the feasibility of some LMIs, it can be assured that . The observer gain vectors (or matrices), that is, and , can be calculated through the feasibility of the LMIs.
The following theorem is the key to presenting the previous results, followed by its proof.
Consider the dynamic system (7) and observer (10). For every matrices, ,, andand, which are defined based on (14) and (15), respectively, the observers’ errorwill converge to zero asymptotically for alland (defined in (13)), if one of the following three cases are fulfilled.
If the subsequent LMIs are satisfied
and succeeding equalities are held
If the following LMIs are satisfied
in addition, , for all .
If there are two positive constants and such that the following inequalities are satisfied
and also
where is identity matrix and
In each case, the matrices and are obtained by and , respectively.
Proof
The nonlinear terms in observation error dynamic (11) take form through the use of DMVT technique (Lemma 1)
where was introduced earlier in Notation 4 and .
Now, utilizing (23), error dynamic (11) can be written in the following form
Error dynamic (27) is an LPV system, that is, using DMVT (Zemouche et al., 2008), the observation error dynamic is transformed into an LPV system. Now, a Lyapunov function candidate is chosen as
where is a matrix in a symmetric positive definite form. The following inequality can be held by fractional differentiating concerning time using (29) and regarding (5)
The right-hand side of equation (30) can be written as
Then, by substituting (27) in right-hand side of the latter, we have
Thus, according to FO differential inequality (30), one can obtain
Based on Assumption 1 and equations (25) and (26), the parameters and are bounded for each i, j, and . Thus, and lie in a bounded domain. The matrix functions and in (31) are affined in and , respectively. Thus using the convexity principle (Boyd and Vandenberghe, 2001), if by the matrices and (such as (14) and (15)), the matrix functions ( and ) are satisfied at the vertices and (such as (13)), it is deduced that for all values of and , the matrix functions ( and ) will lie in bounded domains as and (such as (12)), respectively. Consequently, noticing (31), one can result
According to (32), if (16) and (17), that is, Cases 1 and 2 are satisfied, then . Also provided that (18) and , for all are pleased, it follows that asymptotic stability and zero convergence of the observer error are concluded, that is, .
In Case 3, considering (19), (20), and (32), one can write
Noticing (22), one sufficient condition for satisfying (33) is
Now, if is true, it can be concluded that
and the proof is complete.
In many dynamic systems, such as biomedical, process control, positive systems, and also some engineering and economic systems, the control signal must be positive, and therefore, this observer can be used for such systems by noticing Case 2 in the theorem.
Although in Case 3, the proposed observer cannot guarantee asymptotic stability of the observer error for unbounded , it must be noted that in natural systems, all input signals are always bounded, and therefore, condition (21) may be satisfied by proper selection of and . However, condition (21) is only one of the sufficient conditions for satisfying the theorem in Case 3, whereas the primary satisfactory condition is , which is less conservative.
The proposed method can be applied to a general affine class of nonlinear integer-order dynamic systems , by making a trivial change in the proof procedure.
5. Numerical examples
Three numerical illustrations are presented in this section to show the soundness and usefulness of the recommended design methodology. To show the validity of the suggested scheme, numerical simulations are presented via MATLAB and Simulink environments.
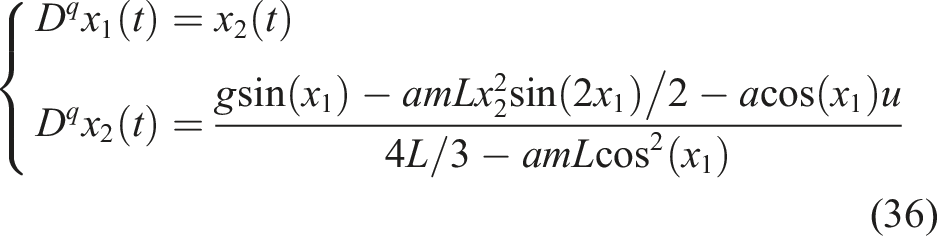
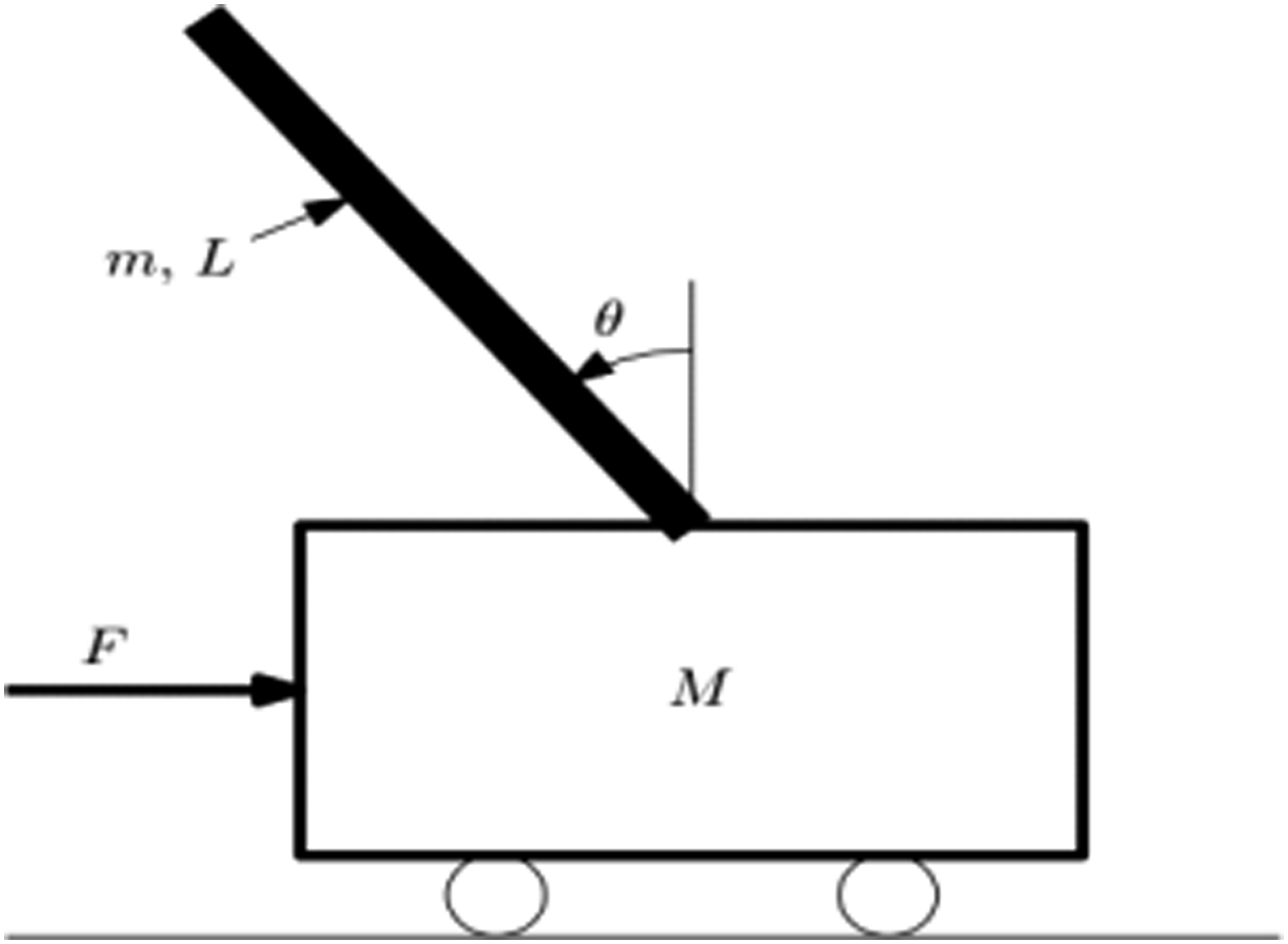
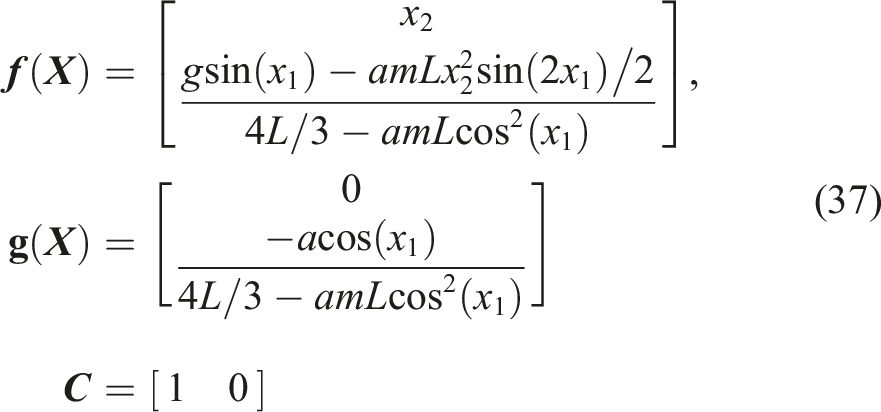
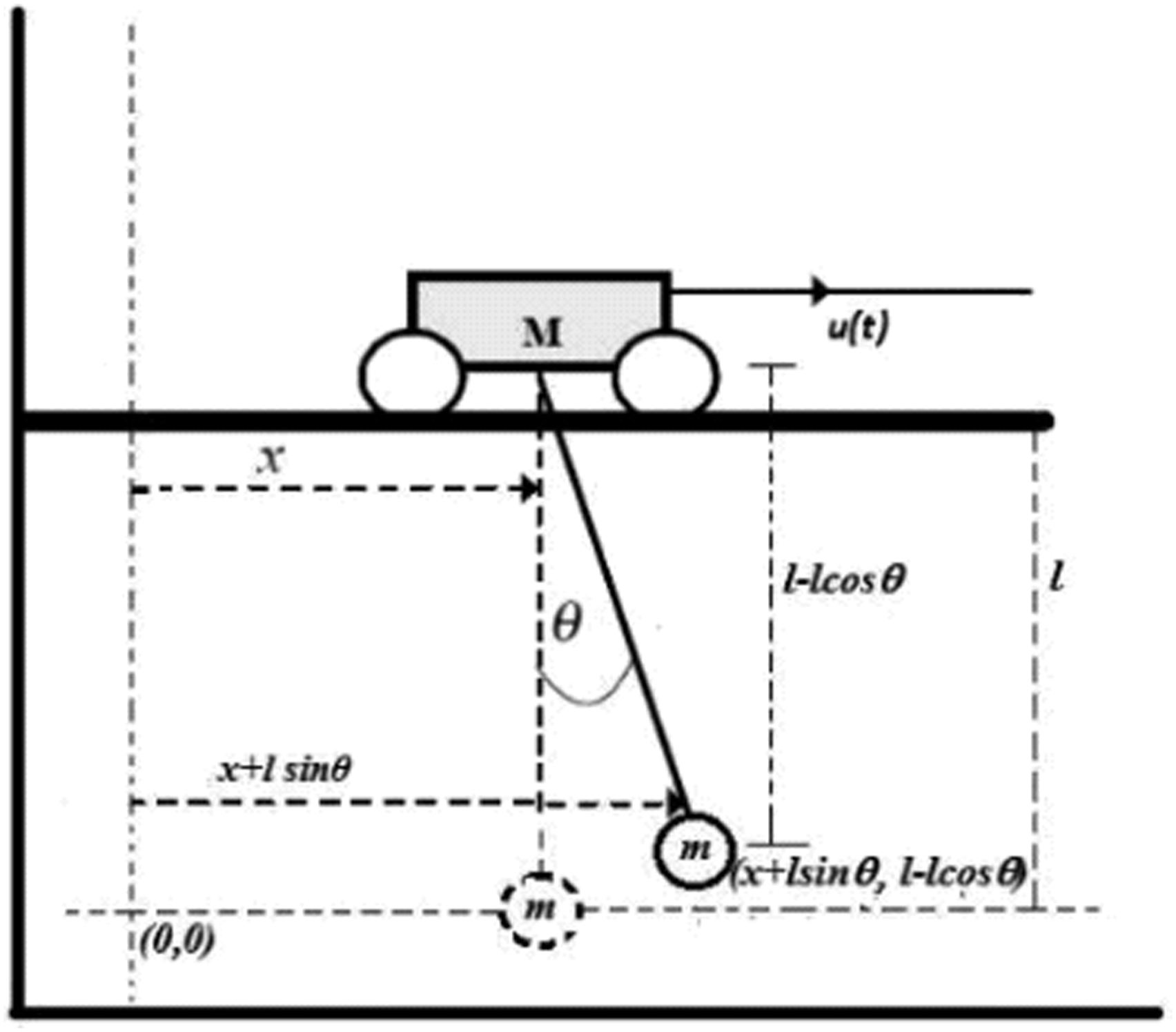
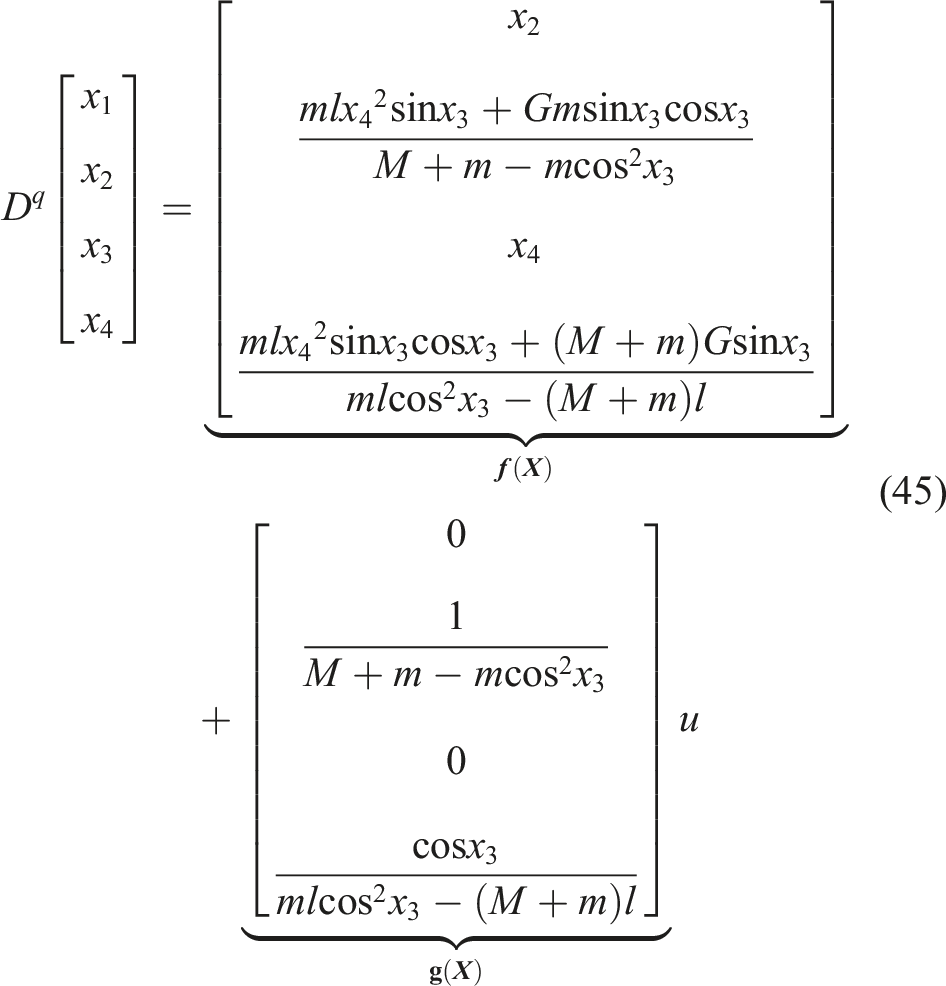
where pendulum angle () from the vertical axis and angular velocity () are revealed by and , respectively, and . The gravity constant is shown by . Pendulum mass is denoted by . and are the symbols for cart mass and pendulum length, respectively, and . The force utilized in the cart is . Parameters of the system are selected as and .
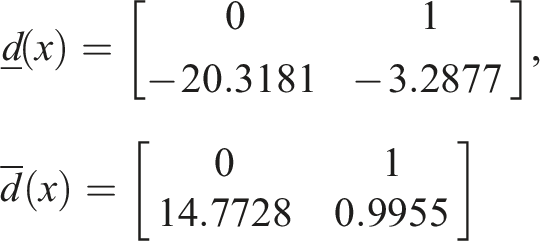
Applying our approach and carrying out the simulation, the values of and are found as
According to (38), the sets of and have and vertices, respectively. By solving LMIs (19) and (20) (Case 3) using Yalmip toolbox and Mosek solver, it obtains
Using these two gains ( and ), asymptotic convergence of the estimation error toward zero is guaranteed. In order to determine the effectiveness of our method, it would be interesting to compare our approach with the one that is suggested in Lan et al. (2016). The nonlinear Lipschitz system is addressed below according to Lan et al. (2016)
where is the state vector, is the input, is the output, that is, the measurable output variables of the system, and is the matrix with appropriate dimensions. The nonlinear function is said to be locally Lipschitz in a region including the origin with respect to , uniformly in , if for all , there exists a constant γ > 0 satisfying
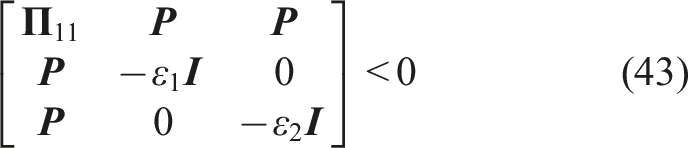
According to Lan et al. (2016), the observer error dynamic system asymptotically converges if there exist a symmetrical matrix and matrix of appropriate dimensions together with real scalars such that
where . Moreover, the observer gain can be chosen as .
By considering the Lipschitz constant for this example as () and solving LMIs (43) using Yalmip toolbox and Mosek solver, it can obtain
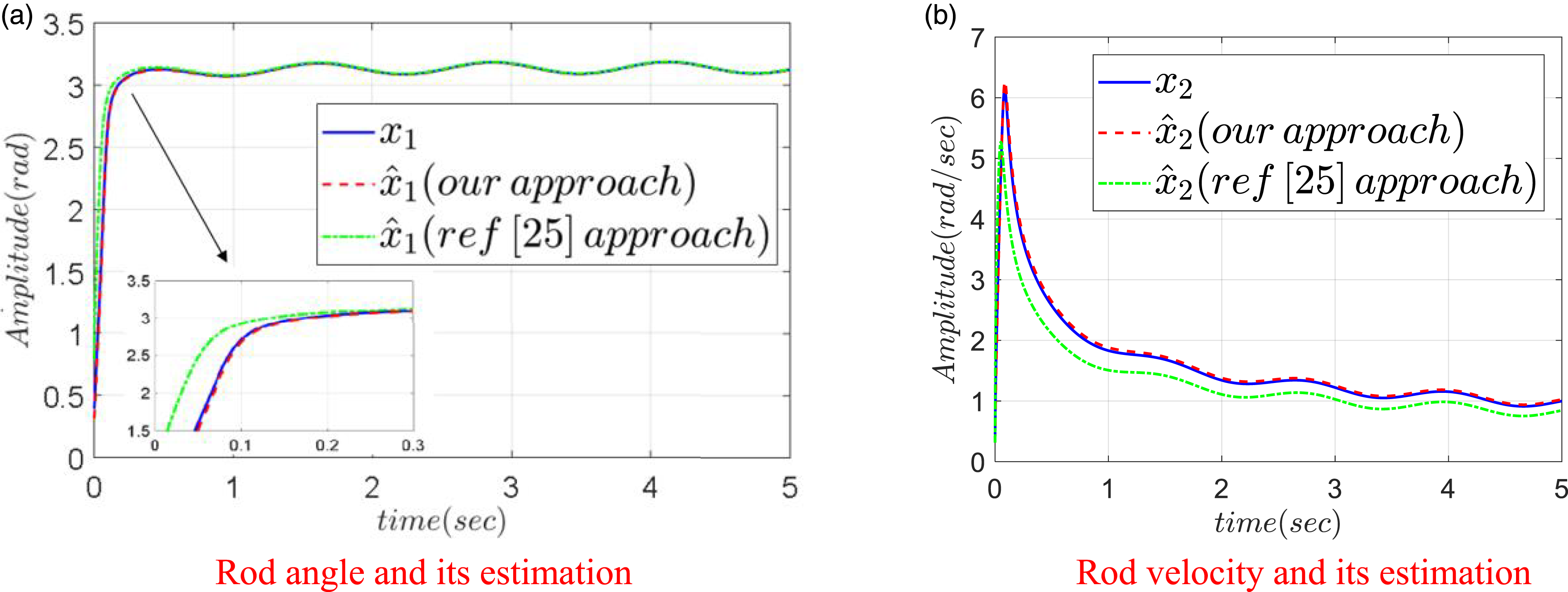
The comparison of the rod angle () and the rod velocity () estimation and their actual values are illustrated in Figure 2(a) and (b), respectively, in the sense of our approach and the one in Lan et al. (2016). In this example, the initial conditions for the system and observer have been chosen as and , respectively.
(a) Rod angle and its estimation and (b) rod velocity and its estimation.
Example 2
As shown in Figure 3, the 2-D gantry crane is used to move heavy loads in factories, ships, etc.
Schematic diagram of 2-D gantry crane.
The nonlinear FO state space representation of the 2-D gantry crane is given by (Pal Singh et al., 2017)
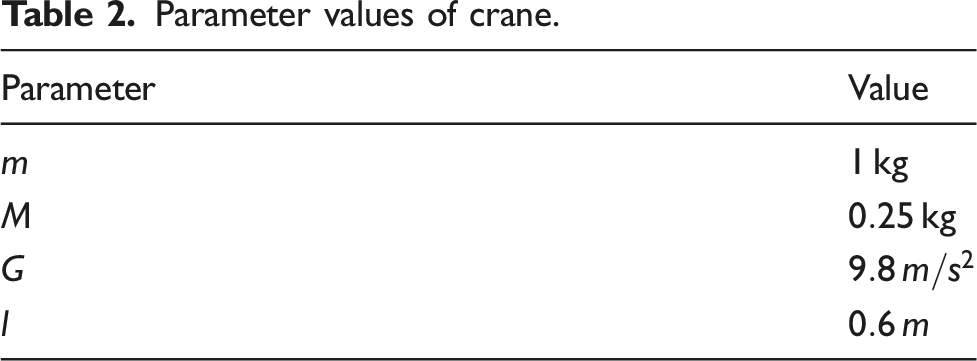
where and are load mass and trolley mass, respectively. , is cable length, and is the force applied to the system. and are the position of the trolley and tilt angle, respectively. Parameter values of the crane are given in Table 2.
Parameter values of crane.
Parameter
Value
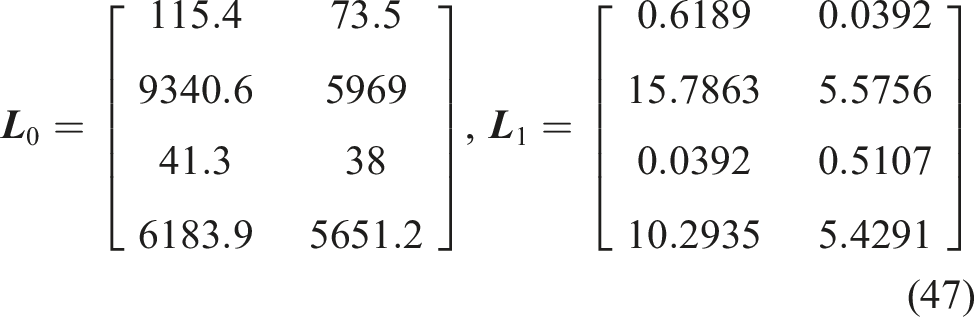
Here, the values of and are obtained as
According to (46), the sets of and have and vertices, respectively. Solving LMIs (18) using Yalmip toolbox and Mosek solver, it is found that
Simulation is done using Simulink with the FOMCON toolbox to solve the fractional system model, and it is run for 10 s. Initial conditions for the system and the observer are assumed as and , respectively. The obtained results are shown in Figures 4–7.
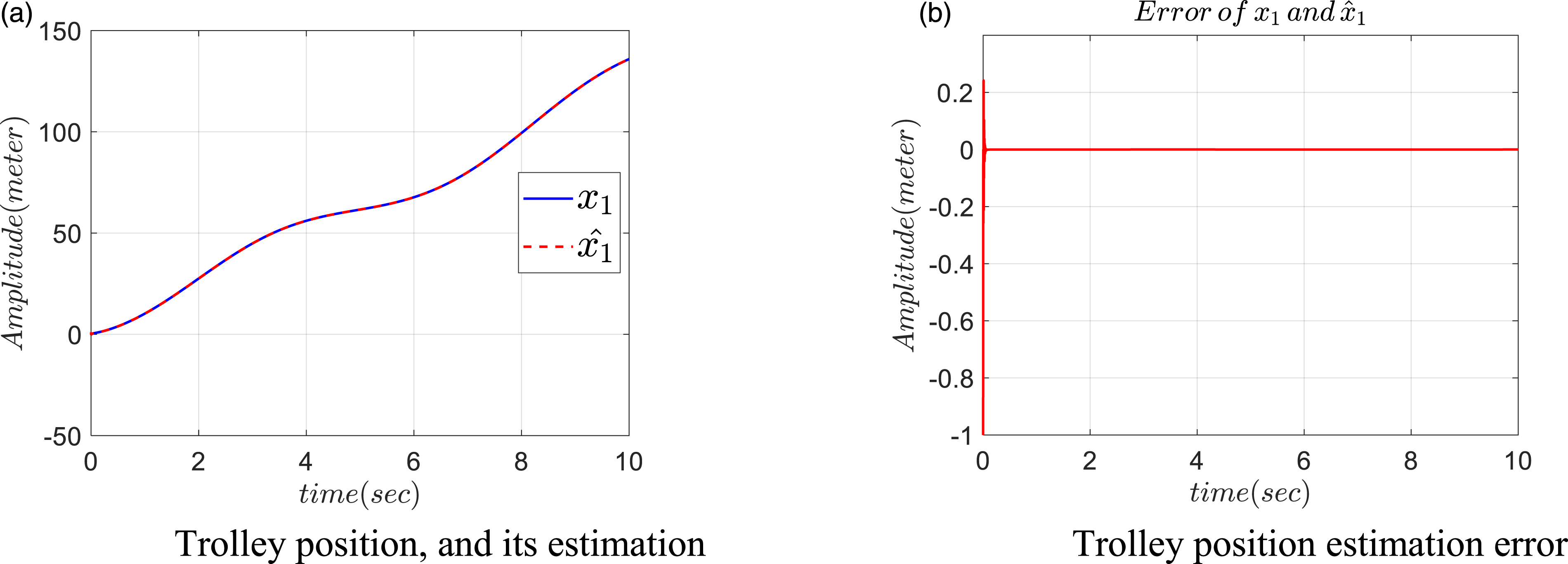
(a) Trolley position and its estimation and (b) trolley position estimation error.
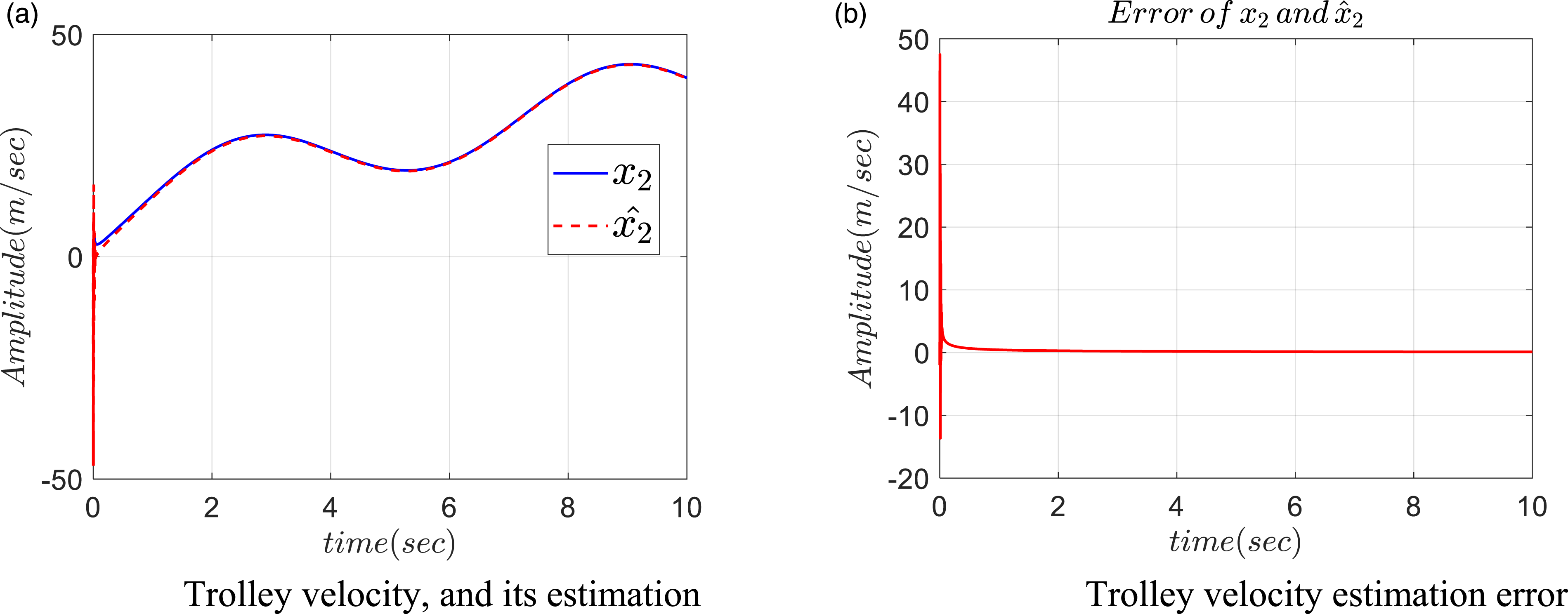
(a) Trolley velocity and its estimation and (b) trolley velocity estimation error.
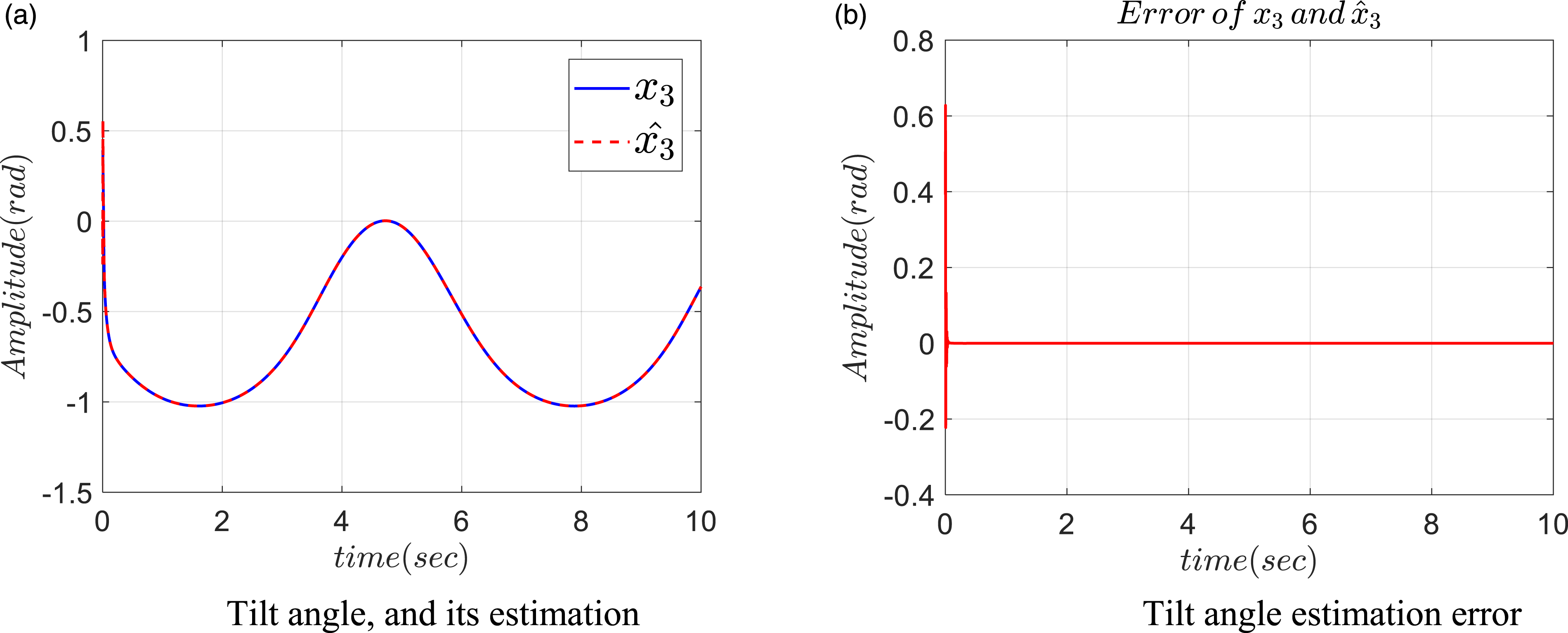
(a) Tilt angle and its estimation and (b) tilt angle estimation error.
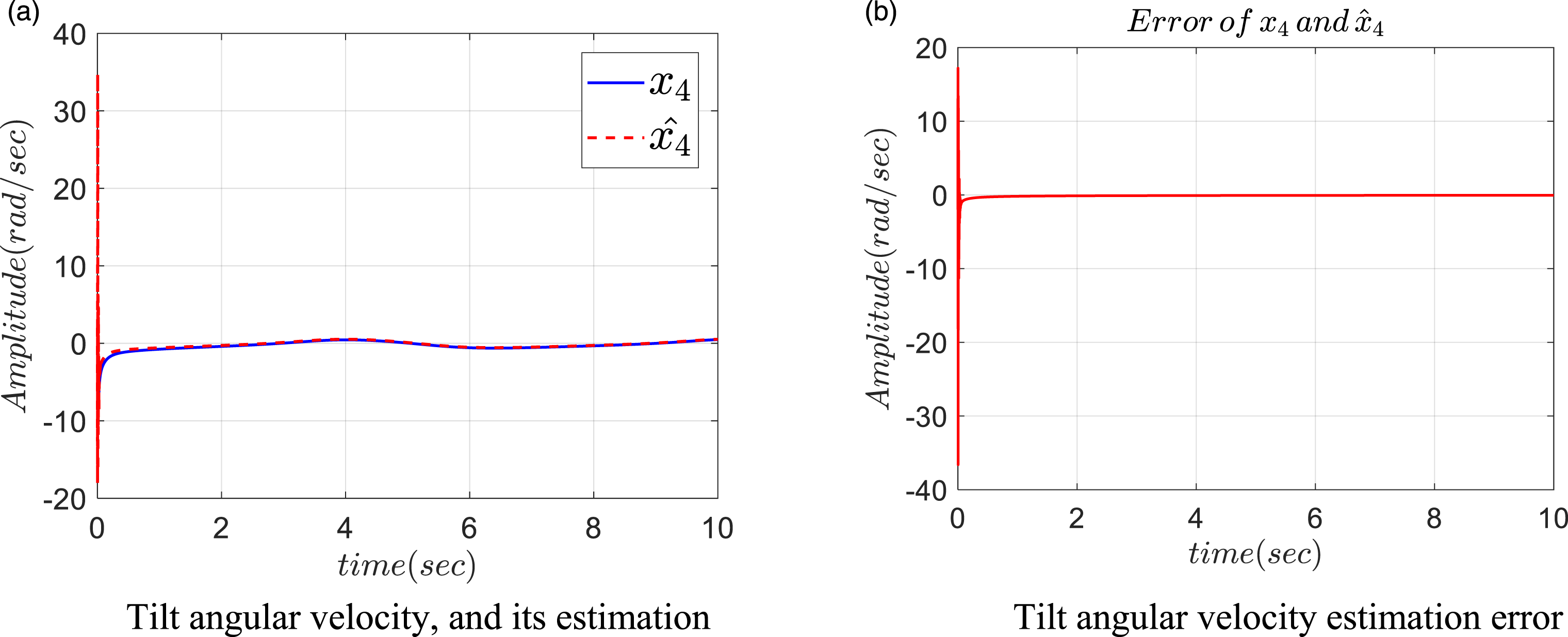
(a) Tilt angular velocity and its estimation and (b) tilt angular velocity estimation error.
Figure 4(a) displays the convergence results for the trolley position () and its estimation (), in which the trolley position estimation error is shown in Figure 4(b). Figure 5(a) gives a plot of trolley velocity () and its estimation (), and the trolley velocity estimation error is depicted in Figure 5(b). Looking at Figure 6(a), it is apparent that estimation of the state of tilt angle () converges to its actual value () in a reasonable manner, whereas this claim is illustrated in Figure 6(b). Noticing Figure 7(a), it can be noted that estimation of tilt angular velocity () can move toward its actual value () in less than 2 s. This is revealed in Figure 7(b) that the estimation error of tilt angular velocity is converged to zero.
Example 3
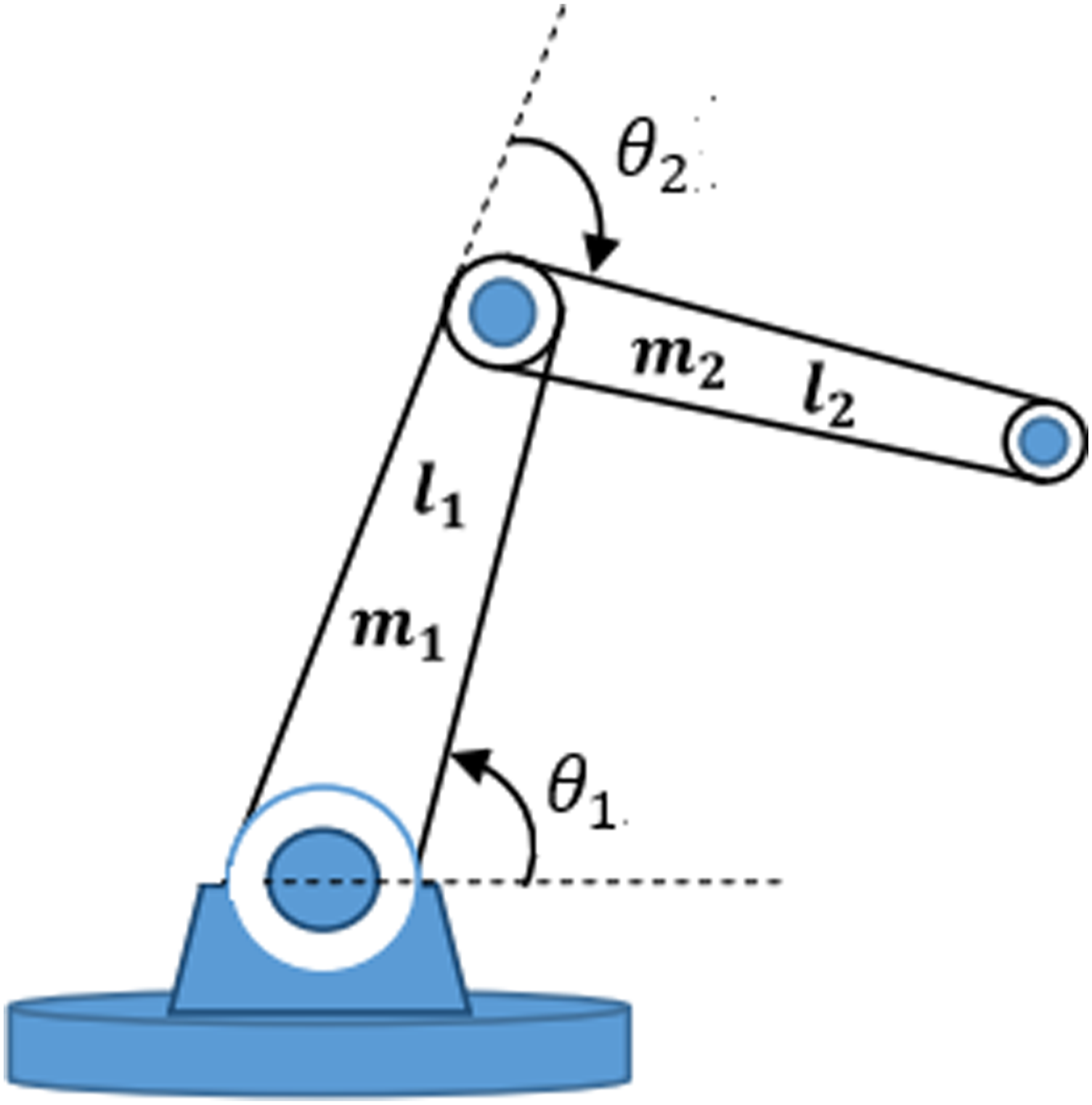
The final case study is a MIMO nonlinear system. A planar two-link robot manipulator model is considered, which is depicted in Figure 8. The joint angles can be displayed by vector , as the outputs and 2-input torque (), which are applied at the manipulator’s joints.
Two-link robot manipulator.
A nonlinear dynamic model of the robot manipulator based on the integer-order form has been introduced in Slotin and Weiping (1991). It can be written in MIMO fractional-order form as
where is the symmetric positive definite inertia matrix of the manipulator, is the vector of centripetal and Coriolis torques, and is the vector of gravitational torques. It is supposed that , which implies the robot manipulator is in the horizontal plane.
Suppose that and in which , for and , for , otherwise . Equation (48) can be written in the state space form as
Now, by carrying out the simulation and finding the vertices of and , LMIs (18) can be solved by Yalmip toolbox and Mosek solver. The gain vectors, that is, and , can be obtained
Using the initial conditions and for the system and observer states, respectively, and the computed observer gain matrices (, and ), the Simulink simulation has been carried out with FOMCON toolbox for 10 s. The obtained results are presented in Figures 9–12.
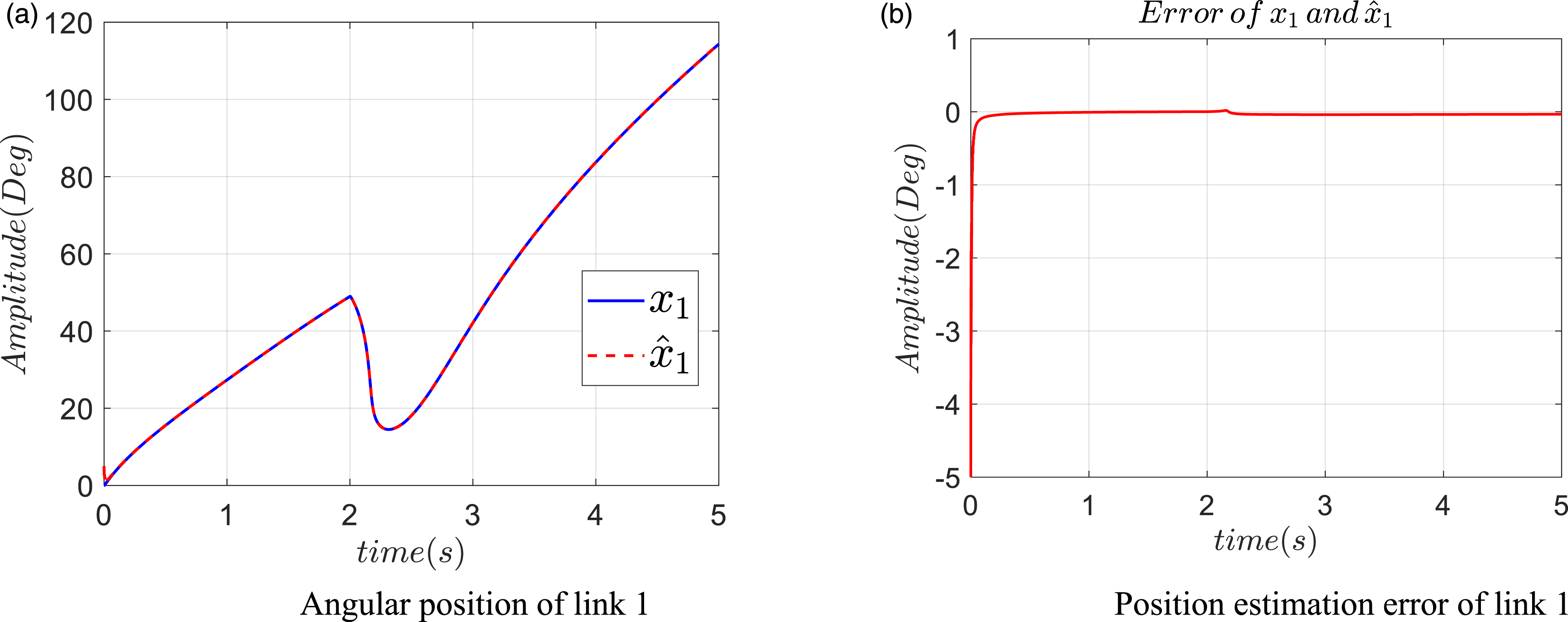
(a) Angular position of link 1 and (b) position estimation error of link 1.
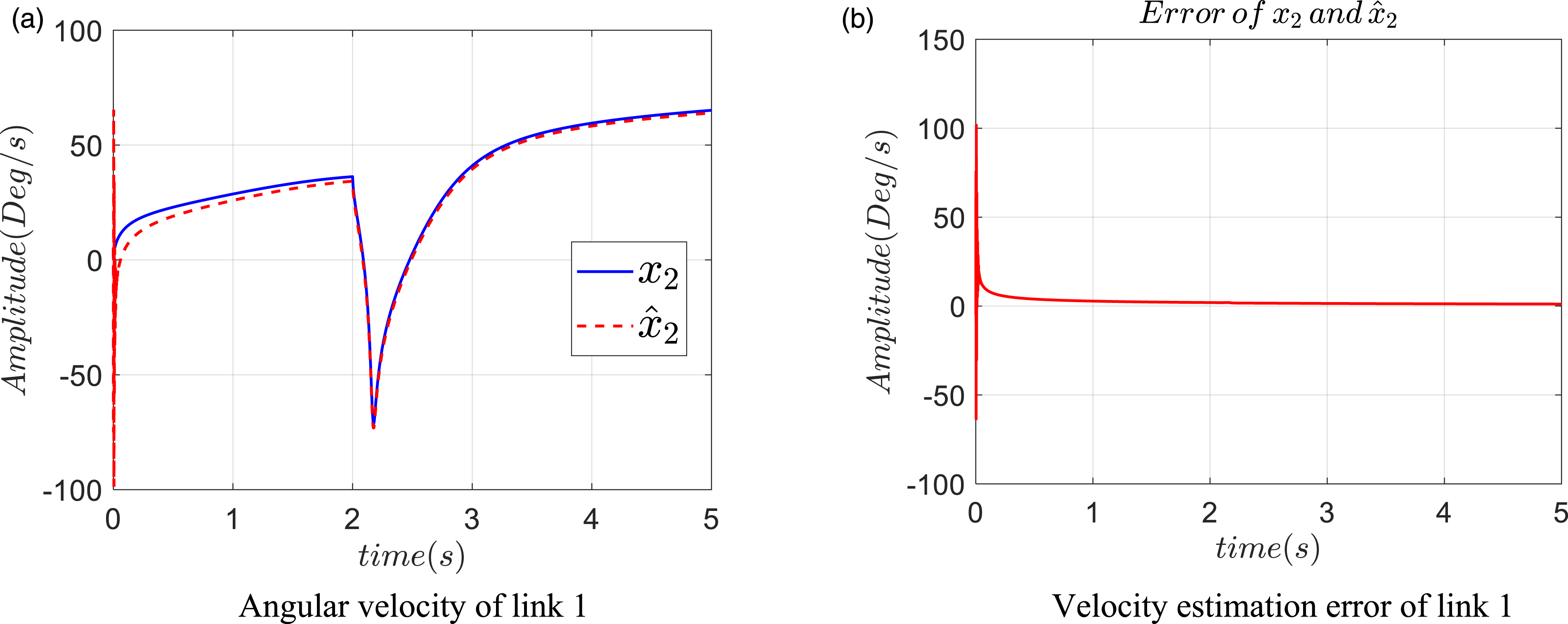
(a) Angular velocity of link 1 and (b) velocity estimation error of link 1.
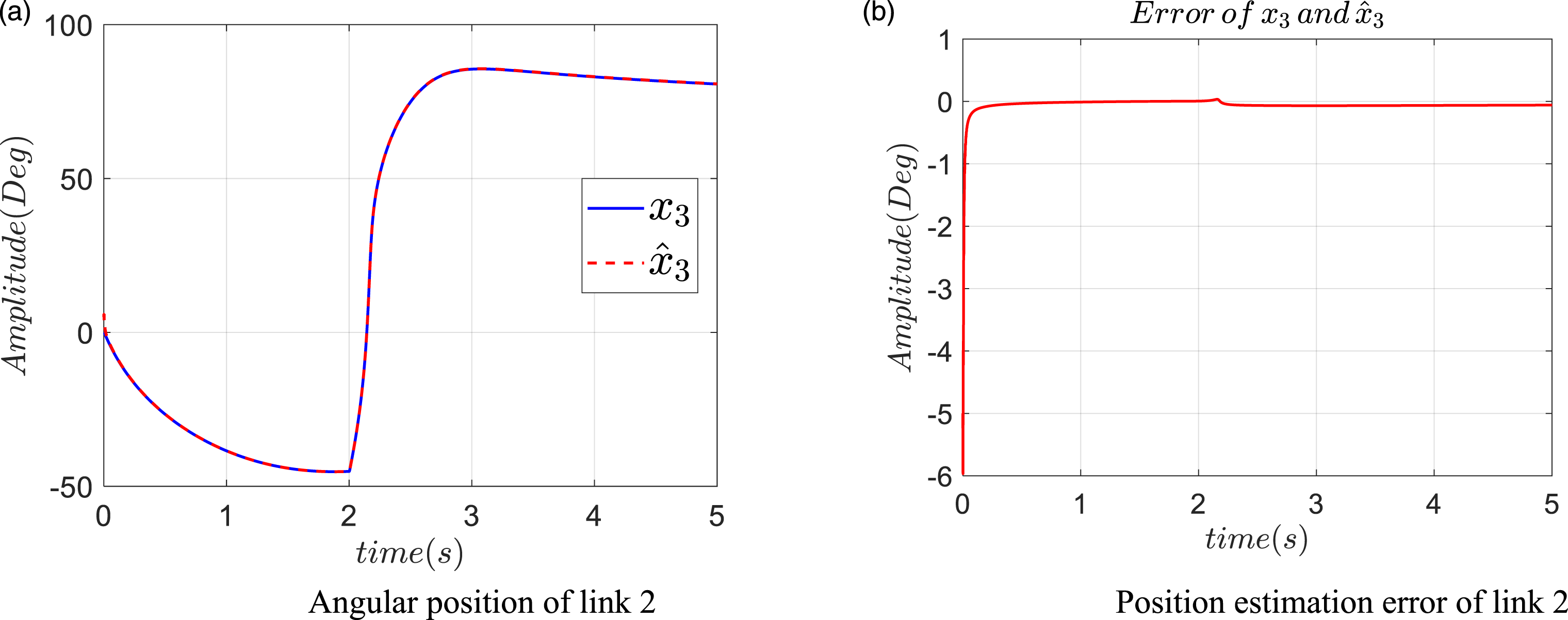
(a) Angular position of link 2 and (b) position estimation error of link 2.
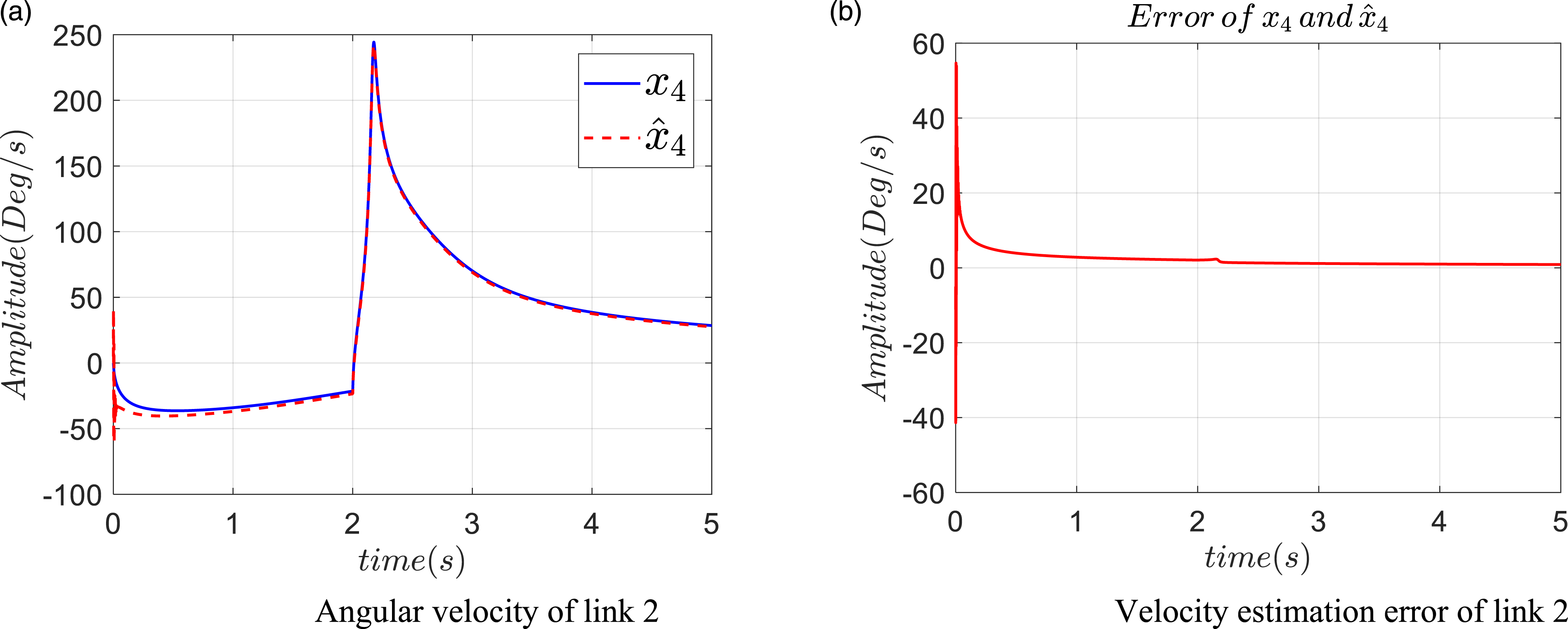
(a) Angular velocity of link 2 and (b) velocity estimation error of link 2.
Looking at the figures, it is apparent that all state estimation errors converge to zero.
6. Conclusion
In the current study, an observer has been designed for a general case of affine nonlinear FO MIMO systems. By DMVT-based approach, the proposed observer error’s dynamic is evolved as an LPV model. Using the convexity principle and solving a set of LMIs at vertices of a convex hull, gain matrices of the observer are designed. Furthermore, these observer gains are derived through the Lyapunov stability theory, that is, asymptotic convergence of the observation error toward zero is guaranteed. It must be noted that the proposed method can be applied to a general affine class of nonlinear integer-order dynamic systems. Numerical simulations have also been presented for three nonlinear FO systems to show the performance and efficacy of the proposed approach.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
ORCID iD
Ali Akbarzadeh Kalat
References
1.
AbbaszadehMMarquezH (2010) Nonlinear observer design for one-sided Lipschitz systems. In: Proceeding American Control Conference, Baltimore, USA, 30 June–02 July 2010, pp. 5284–5289.
2.
AbdullahAQasemO (2019) Full-order and reduced-order observers for linear parameter-varying systems with one-sided Lipschitz nonlinearities and disturbances using parameter-dependent Lyapunov function. Journal of Franklin Institute356(10): 5541–5572.
3.
AguilaCNDuarte MermoudMAGallegosJ (2014) Lyapunov functions for fractional order systems. Communications in Nonlinear Science and Numerical Simulation19(19): 2951–2957.
4.
AhmadMASayedEL (1996) Fractional-order diffusion wave equation. International Journal of Theoretical Physics35(2): 311–322.
5.
AnagnostouGBoemFKuenzelS, et al. (2018) Observer-based anomaly detection of synchronous generators for power systems monitoring. IEEE Transactions on Power Systems33(4): 4228–4237.
6.
AtamAMathelinLCordierL (2014) A hybrid approach for control of a class of input-affine nonlinear systems. International journal of innovative computing, information and control10(3): 1207–1228.
7.
BoroujeniEAMomeniHR (2012) Non-fragile nonlinear fractional order observer design for a class of nonlinear fractional order systems. Signal Processing92(10): 2365–2370.
ChenDZhangRLiuX, et al. (2014) Fractional order Lyapunov stability theorem and its applications in synchronization of complex dynamical networks. Communications in Nonlinear Science and Numerical Simulation19(12): 4105–4121.
10.
ChenGFriedmanEG (2005) An RLC interconnect model based on fourier analysis. IEEE Transactions on Computer-Aided Design of Integrated Circuits and Systems24(2): 170–183.
11.
ChenWSaifM (2012) Fuzzy Nonlinear unknown input observer design with fault diagnosis applications. Journal of Vibration and Control16(3): 377–401.
12.
DabiriAButcherE (2019) Optimal observer-based feedback control for linear fractional-order systems with periodic coefficients. Journal of Vibration and Control25(7): 1379–1392.
13.
DadrasSMomeniHR (2011) Fractional sliding mode observer design for a class of uncertain fractional order nonlinear systems. In: 50th IEEE Conference on Decision and Control and European Control Conference, Orlando, FL, 12–15 December 2011.
14.
Duarte-MermoudMAAguilaCNGallegosJA, et al. (2014) Using general quadratic Lyapunov functions to prove Lyapunov uniform stability for fractional order systems. Communications in Nonlinear Science and Numerical Simulation22(1–3): 650–659.
15.
GaoQHouYLiuJ, et al. (2019) An extended state observer based fractional order sliding mode control for a novel electro-hydraulic servo system with Iso actuation balancing and Positioning. Asian Journal of Control21(1): 289–301.
16.
GhavidelHFKalatAA (2018) Observer-based hybrid adaptive fuzzy control for affine and nonaffine uncertain nonlinear systems. Neural Computing and Applications30(4): 1187–1202.
17.
HafeziAKhandaniKJohari MajdV (2020) Non-fragile exponential polynomial observer design for a class of nonlinear fractional-order systems with application in chaotic communication and synchronization. International Journal of Systems Science51(8): 1353–1372.
18.
HuGD (2006) Observers for one-sided Lipschitz nonlinear systems. IMA Journal of Mathematical Control and Information23(4): 395–401.
19.
IchiseMNagayanagiNKojimaT (1971) An analog simulation of non-integer order transfer functions for analysis of electrode process. Journal of Electroanalytical Chemistry and Interfacial Electrochemistry33: 253–265.
20.
JensonVGJeffreysGV (1977) Mathematical Methods in Chemical Engineering. London, UK: Academic Press.
21.
JeongCSYazEEBahakeemA, et al. (2006) Resilient design of observers with general criteria using LMIs. In: American Control Conference, Minneapolis, MN, USA, 14–16 June 2006, pp. 111–116.
22.
KhalifaTMabroukM (2015) On observer for a class of uncertain nonlinear systems. Nonlinear Dynamics79(1): 359–368.
23.
LanYHZhouY (2013) Non-fragile observer-based robust control for a class of fractional-order nonlinear systems. System and Control Letter62(12): 1143–1150.
24.
LanYHWangLLDingL, et al. (2016) Full order and reduced-order observer design for a class of fractional-order nonlinear systems. Asian Journal of Control-18(4): 1467–1477.
25.
LaskinN (2000) Fractional market dynamics. Physica A: Statistical Mechanics and its Applications287(3): 482–492.
26.
LiYLiuLFengG (2017) Finite-Time stabilization of a class of T-S fuzzy systems. IEEE Transactions on Fuzzy Systems25(6): 1824–1829.
27.
LiuDLalegKT (2015) Robust fractional order differentiators using generalized modulating functions method. Signal Processing107(2): 395–406.
28.
LuenbergerDG (1964) Observing the state of a linear system. IEEE Transactions on Military Electronics8(2): 74–80.
29.
N’DoyeIVoosHDarouachM (2013) Observer-based approach for fractional-order chaotic synchronization and secure communication. IEEE Journal on Emerging and Selected Topics in Circuits and Systems3(3): 442–450.
30.
NDoyeIDarouachMVoosH, et al. (2013) Design of unknown input fractional-order observers for fractional order systems. International Journal of Applied Mathematics and Computer Science23(3): 491–500.
31.
Pal SinghASrivastavaTAgrawalH, et al. (2017) Fractional order controller design and analysis for crane system. Progress in Fractional Differentiation and Applications3(2): 155–162.
32.
RapaicMAlessandroP (2014) Variable-order fractional operators for adaptive order and parameter estimation. IEEE Transactions on Automatic Control59(3): 798–803.
33.
Ren-JieCJun-GuoL (2022) H∞ fault detection observer design for fractional-order singular systems in finite frequency domains. ISA Transactions129: 100–109.
34.
SenejohnnyDMDelavariH (2012) Active sliding observer scheme based fractional chaos synchronization. Communications in Nonlinear Science and Numerical Simulation17(11): 4373–4383.
35.
SharmaVAgrawalVSharmaB, et al. (2016) Unknown input nonlinear observer design for continuous and discrete time systems with input recovery scheme. Nonlinear Dynamics85(1): 645–658.
36.
SharmaVShuklaMSharmaBB (2018) Unknown input observer design for a class of fractional order nonlinear systems. Chaos, Soliton and Fractal115: 96–107.
37.
SlotinJWeipingL (1991) Applied Nonlinear Control. Hoboken, NJ: Prentice-Hall International USA.
38.
SuXShiPWuL, et al. (2016) Fault detection filtering for nonlinear switched stochastic systems. IEEE Transactions on Automatic Control61(5): 1310–1315.
39.
SunHAbdelwahadAOnaralB (1984) Linear approximation of transfer function with a pole of fractional order. IEEE Transactions on Automatic Control29: 441–444.
40.
ValérioDTrujilloJJRiveroM, et al. (2013) Fractional calculus: a survey of useful formulas. The European Physical Journal Special Topics222(8): 1827–1846.
41.
YangBYuDFengG, et al. (2006) Stabilisation of a class of nonlinear continuous time systems by a fuzzy control approach. IEE Proceedings, Control Theory and Applications153(4): 427–436.
42.
YangYLinCChen, et al. (2020) H∞ observer design for uncertain one-sided Lipschitz nonlinear systems with time-varying delay. Applied Mathematics and Computation375(15): 125066.
43.
YunlongZZheDZhonghuaC, et al. (2022) Neural network extended state-observer for energy system monitoring. Energy263: 125736.
44.
ZemoucheABoutayebM (2009) A unified H∞ adaptive observer synthesis method for a class of systems with both Lipschitz and monotone nonlinearities. System snd Control Letters58: 282–288.
45.
ZemoucheABoutayebM (2013) On LMI conditions to design observers for Lipschitz nonlinear systems. Automatica49(2): 585–591.
46.
ZemoucheABoutayebMBaraGI (2005) Observer design for nonlinear systems-an approach based on the differential mean value theorem. In: Proceedings of the 44th IEEE Conference on Decision and Control, Seville, Spain, 15 December 2005, pp. 6353–6358.
47.
ZemoucheABoutayebMBaraGI (2008) Observers for a class of Lipschitz systems with extension to H∞ performance analysis. System and Control Letters57(1): 18–27.
48.
ZhangWSuHZhuF, et al. (2015) Unknown input observer design for one-sided Lipschitz nonlinear systems. Nonlinear Dynamics79: 1465–1479.
49.
ZhongFLiHZhongS (2016) State estimation based on fractional order sliding mode observer method for a class of uncertain fractional-order nonlinear systems. Signal Processing127: 168–184.