
Abstract
The paper investigates a nonlinear vibration mitigation strategy of a variable length pendulum subjected to a harmonic external excitation. A nonlinear absorber in a form of a tri-pendulum system is used to reduce the response of the primary pendulum. Thus, the paper investigates a non-stationary problem of nonlinear vibration mitigation of the primary pendulum using another nonlinear passive pendulum absorber. Due to genuine interest in capturing the nonlinear dynamic interaction, the paper numerically studies the performance of the primary mass and absorber, first, by constructing 2D maps in the unrestrained parametric space, which demonstrate the qualitative behavior of the system. Then, the surrogate optimization technique is used to tune the absorber’s parameters within a given bounded set of parameters’ values. The optimization is conducted based on a priori known reeling speed or acceleration/deceleration of the primary pendulum, thereby completely removing the need for acquiring a current system states essential for active feedback control. The obtained numerical results validate the proposed strategy and demonstrate high performance of the nonlinear passive absorber when it is properly tuned.
Keywords
1. Introduction
Various mechanisms for lifting goods, similar to cranes, have been serving humans for thousands of years.
There are currently no systems that allow cranes to operate autonomously no matter how perfect the weather conditions are. One of the reasons is the unpredictability of the surrounding environment, which together with the motion of the crane and payload may result in adverse swinging vibrations of the payload. These vibrations, if not mitigated, can lead to a collision between the payload and the surrounding structures, increase in the hoist tension leading to its failure, or result in the collapse of the crane itself due to unbalance. Thus, these vibrations should be mitigated well in advance, which is a nontrivial task for an inexperienced operator. The reason is that these vibrations occur in the horizontal plane, whereas the operator can control the motion of the payload in the perpendicular vertical direction. This is a challenging control problem, which has been attracting significant interest from researchers all over the world.
Cranes can be classified by the degrees of freedom they have (Abdel-Rahman et al., 2003), and typically, the payload motion is modeled as a lumped mass system or mathematical pendulum. Depending on the crane type, various control strategies have been proposed and validated numerically and/or experimentally. Strategies based on H ∞ (Alfi et al., 2015; Golovin and Palis, 2019), neural network (Xia and Luan, 2015; Ramli et al., 2018), nonlinear control (Sun et al., 2018a, 2019; Wu et al., 2020b), adaptive and input shaping control (Qian et al., 2019; Maghsoudi et al., 2019; Zhao and Huang, 2019; Khorshid et al., 2021), optimal control (Sun et al., 2018b; Wu et al., 2020a), vision control (Okubanjo et al., 2018), sliding and saturated control (Tuan and Lee, 2018; Zhang et al., 2020; Aboserre and El-Badawy, 2021), PD control (Zhang et al., 2019), hoisting control (Miranda-Colorado and Aguilar, 2019; Yurchenko and Alevras, 2014), and combination of some of the above strategies (Ramli et al., 2020; Abdullahi et al., 2020) were investigated and presented in the literature. The review papers Hyla (2012); Ramli et al. (2017) comprehensively cover the existing literature up to 2017, whereas the textbook Hong and Shah (2019) published in 2019 also has a number of recent and important references. There are other active control strategies considered, including a mass moving along the pendulum (Iourtchenko, 2006; Maia et al., 2014; Ruta et al., 2019) and passive absorbers (Ibrahim, 2008; Xu et al., 2019; Sarigul-Klijn et al., 2006). Nevertheless, the development of an effective control strategy relies on the information from various sensors essential for decision making. However, in many practical applications, these sensors are not available and cannot be retrofitted; moreover, they can fail leaving a crane operator to deal with the swinging payload alone.
Recently, the authors proposed to use a pendulum tuned mass damper (PTMD) as a potential nonlinear energy absorbing mechanism similar to a tuned mass damper (TMD) (Den Hartog, 2013; Yurchenko, 2014; Lopez et al., 2014; Li and Zhang, 2020). Typically, a TMD is implemented by adding a secondary mass to the original oscillatory single-degree-of-freedom system with a primary mass, where the mass and the stiffness of the TMD are selected or tuned appropriately. In contrary, the PTMD tuning is not obvious since its dynamics is inherently nonlinear and its response frequency depends on the response amplitude. Moreover, the PTMD’s natural frequency depends on the pendulum length and thus cannot be selected arbitrary due to the potential spatial constraints, if any. In Yurchenko et al. (2021), the authors studied 3 different options of using PTMD and found that due to the unique properties of the tri-pendulum design, it was very effective in vibration mitigation of the primary mass.
However, in Yurchenko et al. (2021), the authors studied a quasi-static case, where the primary mass was stationary or moving very slowly. Often a pendulum has been used together with another mass–spring system to study autoparametric vibrations and autoparametric absorbers (Hatwal, 1982; Cuvalci and Ertas, 1996; Vazquez-Gonzalez and Silva-Navarro, 2008; Alevras et al., 2014; Gumus and Ertas, 2016). It should be stressed that these studies were focused on developing a pendulum absorber for stationary vibrating linear and nonlinear mass–spring systems, whereas the authors of Yurchenko et al. (2021) have been focused on application of the pendulum absorber to another pendulum. Fuzzy control approach has been applied to a variable length pendulum in Li et al. (2022); in Chen and Sun (2022), a feedback control strategy for a 5-DOF crane system was studied.
In this paper, the authors study a single-degree-of-freedom pendulum subjected to a periodic excitation. Although such an excitation does not realistically act on a crane’s payload, it is an important benchmark case to understand the performance of a nonlinear absorber in the non-stationary case of variable length of the primary mass. The authors believe that the proposed methodology when validated can be extended to more realistic excitations, such as impulse or ramp unit, as well as stochastic input. The tri-pendulum nonlinear absorber, which behaves as another pendulum with independently adjustable natural frequency and viscous damping, is applied to the primary mass to study its effectiveness, while the primary pendulum is being lifted up or down. The main motivation is to understand how efficient the earlier proposed by Yurchenko et al.’s (2021) vibration mitigation strategy will be on a reeling up pendulum since it is well-known that a classical TMD is not very effective in non-stationary cases. Moreover, we proposed a novel tuning strategy, which is based on the reeling speed and acceleration, which is known in advance as the properties of the reeling motor, thereby completely excluding the need for any feedback control. In Section 2, the governing equations of motion are derived using the Lagrange approach. Section 3 studies the performance of the nonlinear absorber and the behavior of the primary mass using 2D maps, contracted in the absorber’s parameters’ space. These maps help to qualitatively understand the dependence of the absorber performance based on its set of parameters. Section 4 proposes to use the surrogate optimization approach to tune the absorber based on the given winch’s velocity and acceleration properties only, without any active control or dependence on a system’s current state. The numerical results of the optimization within a bounded set of absorber’s parameters are presented and discussed. The conclusions are presented in the last section of the paper.
2. The governing equations of motion
The tri-pendulum (Alevras and Yurchenko, 2013) is a special case of the N-pendulum with three separate arms, with lumped masses M i placed at distance h i from the center, separated in plane with 120° from each other, and connected to a common hub placed on a bearing to allow oscillating around its suspension point.
Assume that the primary mass is externally excited, as shown in Figure 1(a), and the tri-pendulum is added to this system, creating a two-degree-of-freedom system, as sketched in Figure 1(b). These oscillations may take place when the primary mass is long, like a part of a wind tower, and thus, the proposed study will not cover this case. Let angles θ1 and θ2 be the inclination angles of the primary mass m and the tri-pendulum masses M
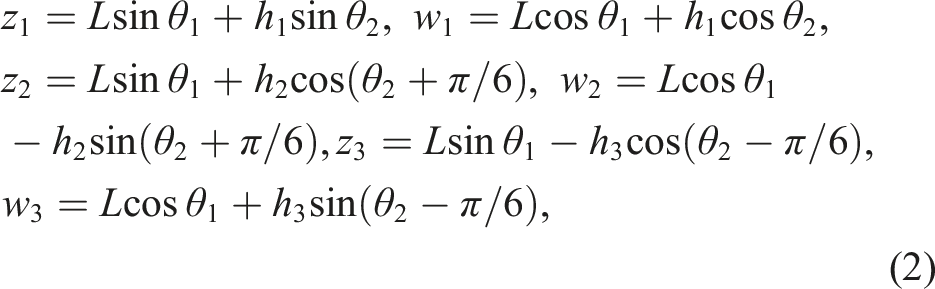
i
, respectively. Then, the geometrical components of the primary mass can be expressed in the Cartesian coordinate system as following The primary mass with the tri-pendulum absorber.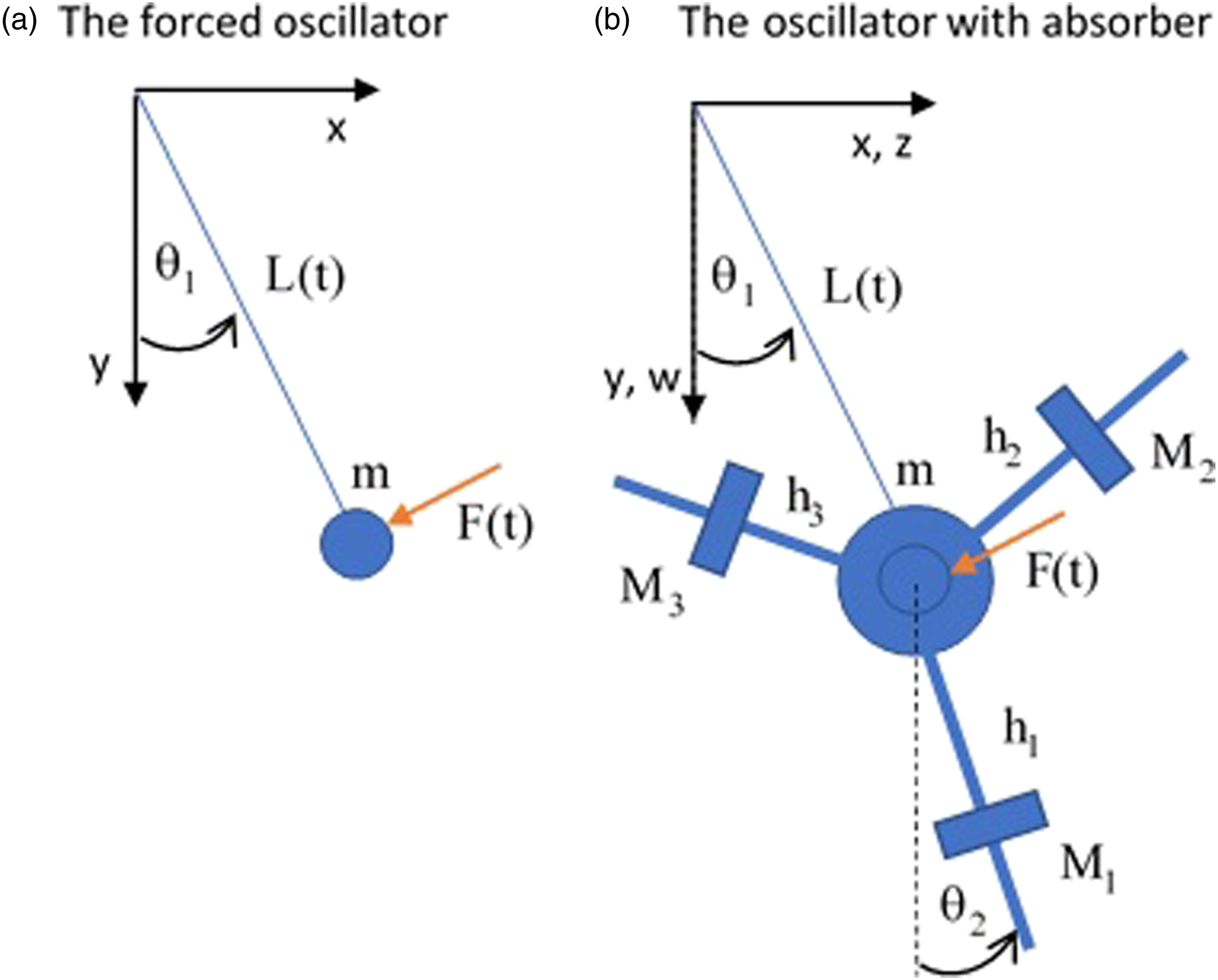

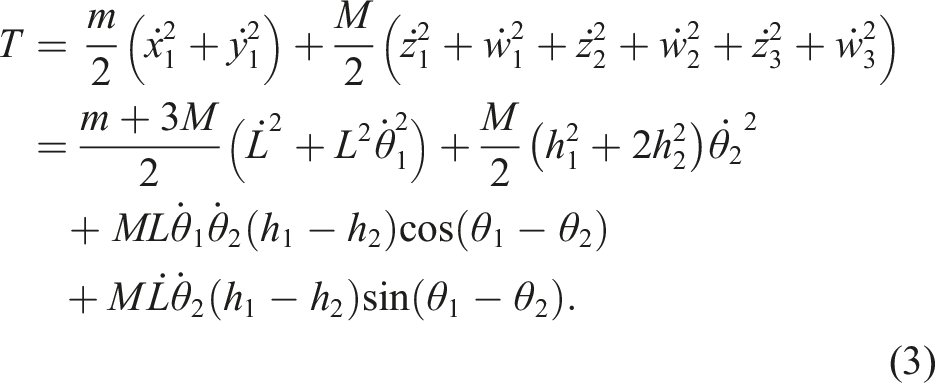
The kinetic energy of the system, assuming that M1 = M2 = M3 = M (for the sake of tuning simplicity), h2 = h3, and h1 > h2, is given by
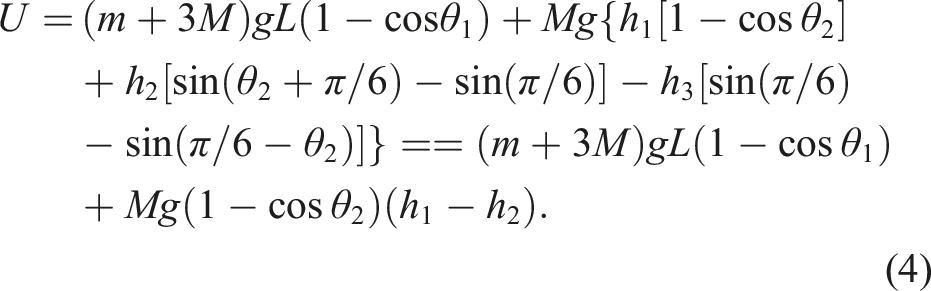
The system potential energy is
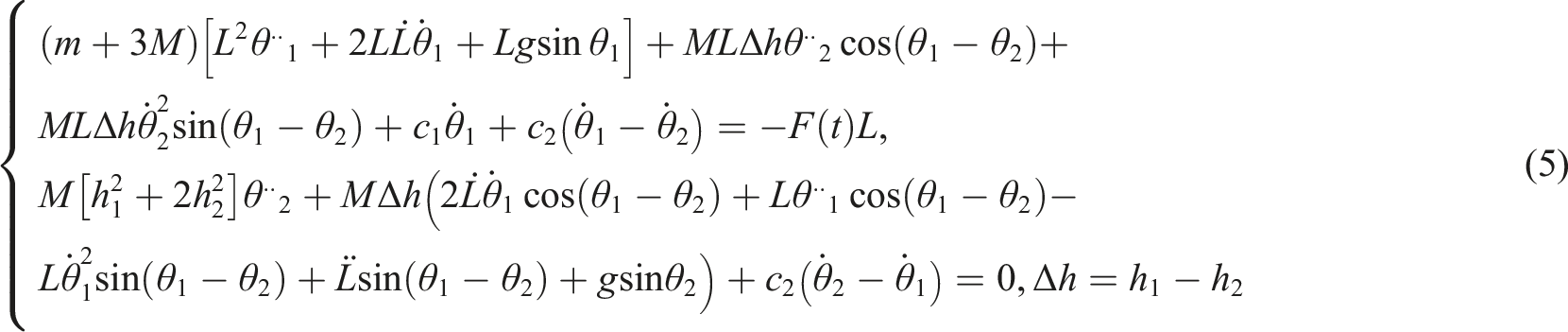
where c1 and c2 are linear damping coefficients and F(t) = λ1 cos(ωt). It should be stressed that the viscous damping in the primary mass c1 was used to avoid introducing other nonlinear effects due to contact that can distort the tuned absorber effect studied in the paper. The viscous friction in the tri-pendulum c2 can be introduced at the hub during the design stage and can be adjusted accordingly. Introducing the following non-dimensional parameters
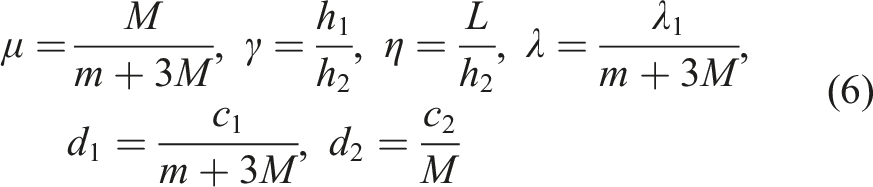
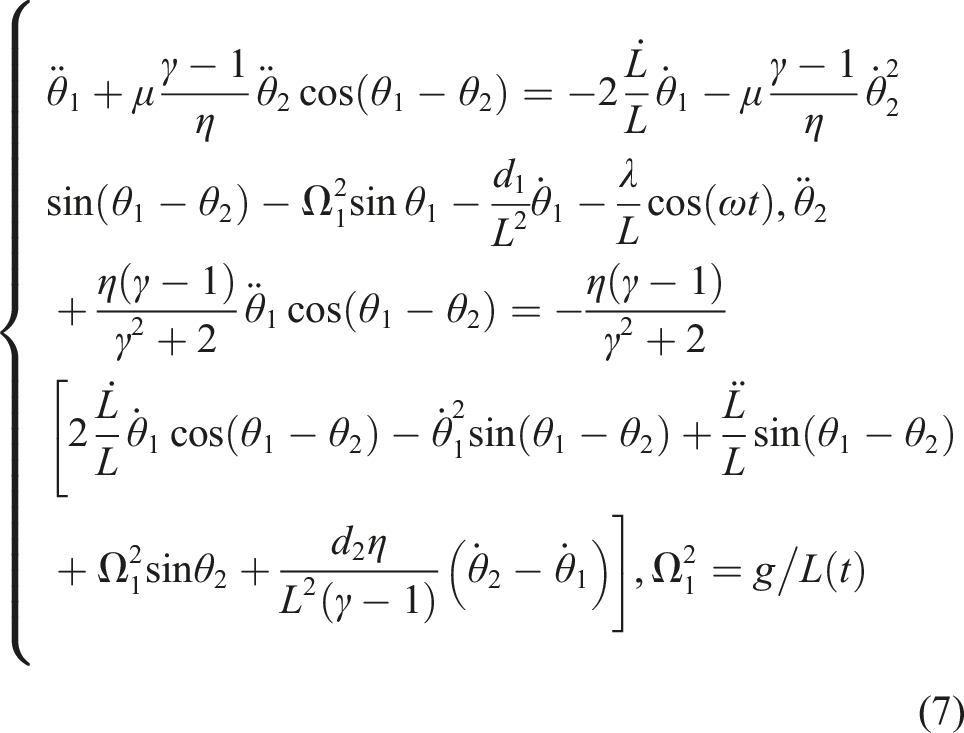
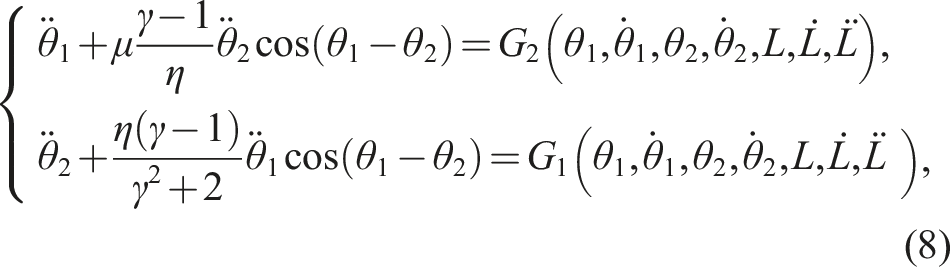
Rewriting equation (7) in the form

Parameters and variables of the system.

From the practical point of view, one of the most interesting cases is when the primary mass is moving with a constant velocity. Thus, it is reasonable to assume that in the case of a constant velocity, the length of the pendulum will be changing as L = L0 + vt, where L0 is the initial position of the cable,
2.1. Dynamic response of the primary mass with the tri-pendulum absorber
The presented equation of motion (10) can be solved numerically; however, because of the varying primary mass length, its natural frequency will vary. In this study, it is assumed that the cable’s length varies between 1 meter and 10 meters with a given speed or a given acceleration. This interval identifies the undesirable excitation frequency range that is approximately ranging from 0.99 rad/s to 3.13 rad/s. In all the presented simulations, the overall time domain was defined by the velocity of the primary mass from the initial cable length to its final position; thus, the higher the cable velocity, the shorter the computational time.
Figure 2 presents four maps of the numerical results generated for ω = 1.1 rad/s, λ = 0.1 m, μ = 0.03, and zero initial conditions. The maps in the γ − h2 space are presented for three different values of the lifting-up velocities and the values of the damping coefficient d2 = 0.1 m2/s and d2 = 0.3 m2/s in the left and the right columns correspondingly. Values of κ for different v and d2 and λ = 0.1 m, ω = 1.1 rad/sec, and μ = 0.03.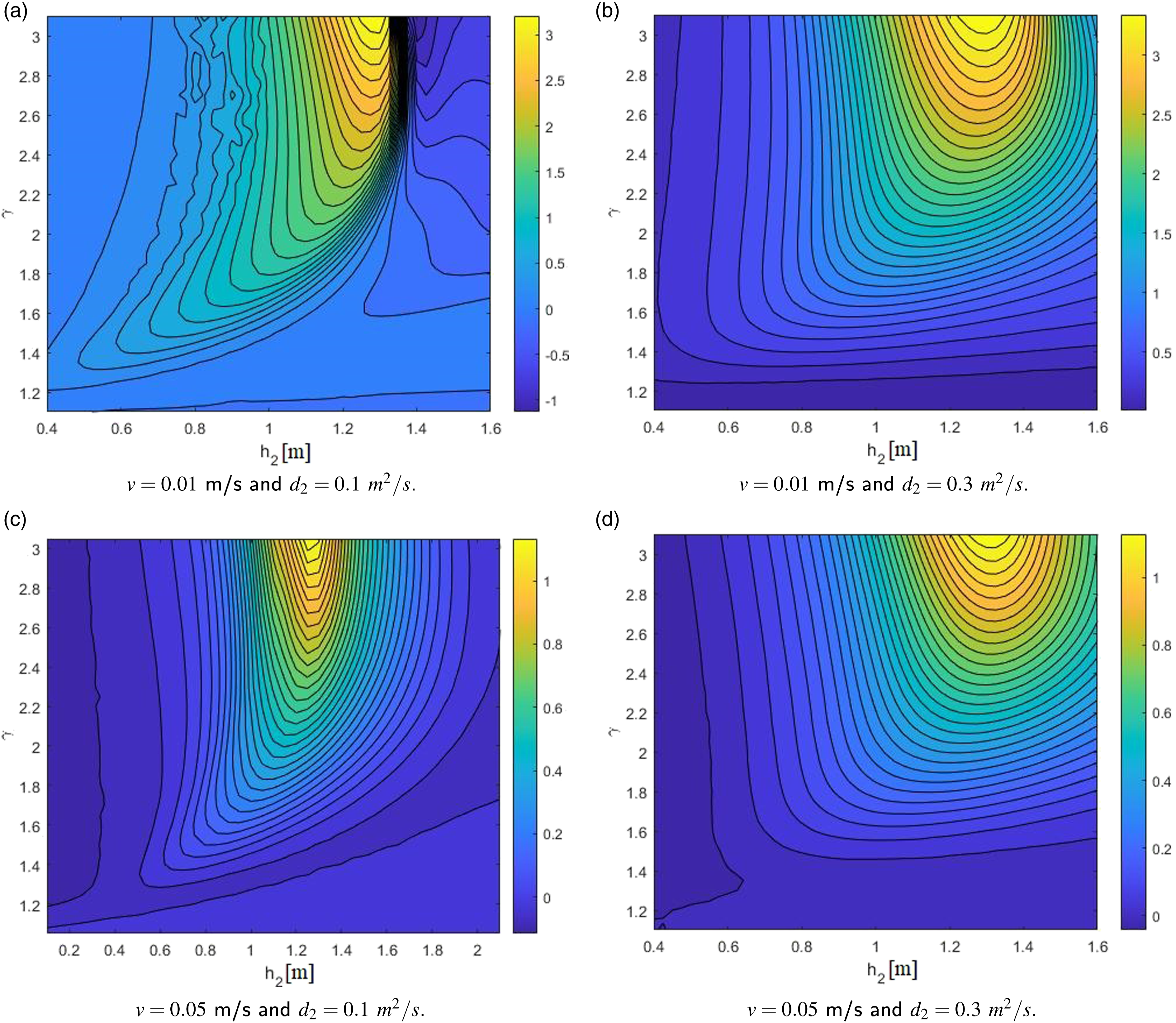
The first row corresponds to v = 0.01 m/s and the second corresponds to v = 0.02 m/s. In these maps, the difference between The difference in horizontal displacement κ for γ = 3.1 and v = 0.01 m/s.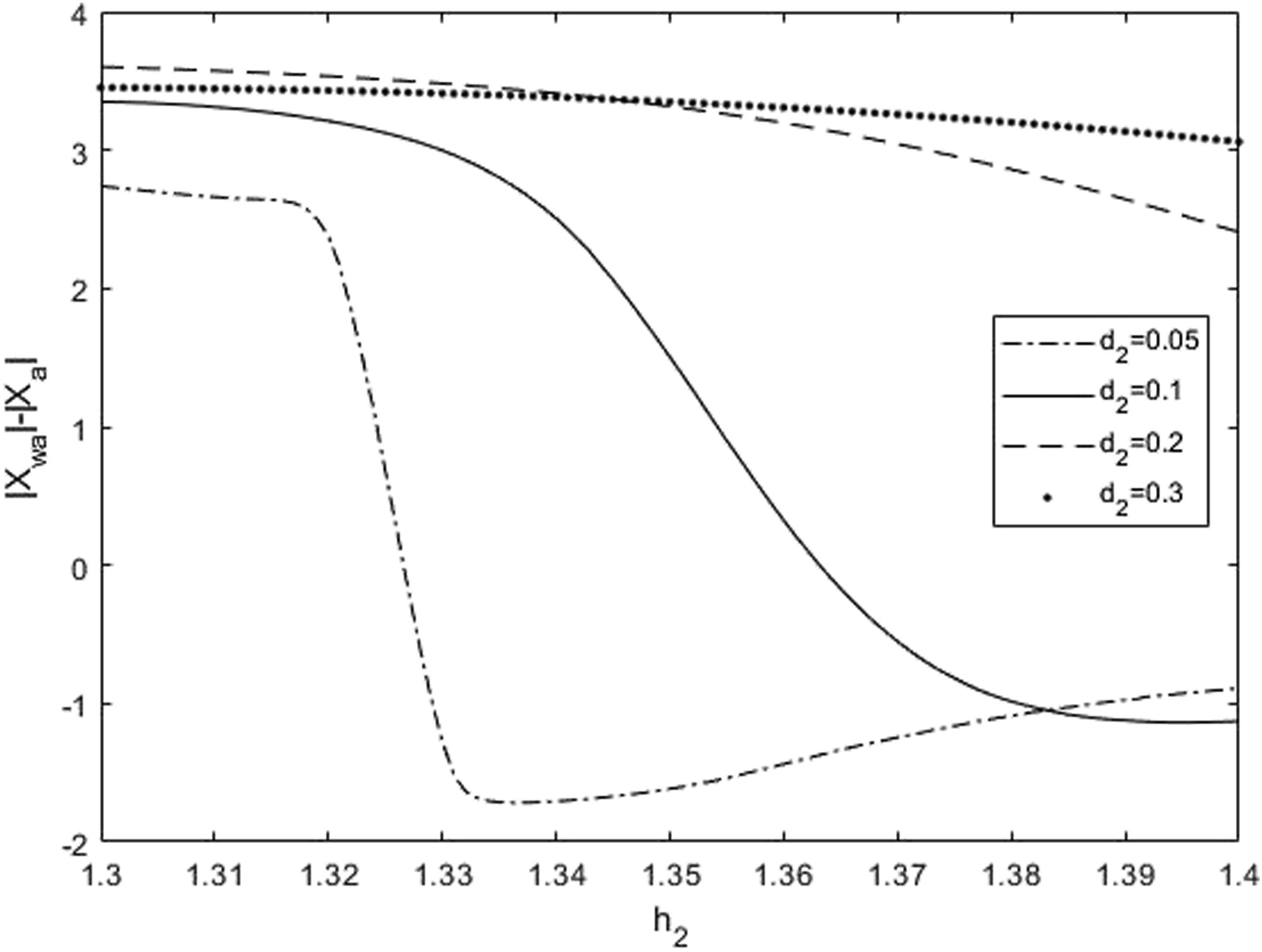
A typical time history of the system is presented in Figure 4, where the parameters of the system are taken the same as in Figure 2(a), but at different points on the map. Blue color represents the primary mass response without the absorber, whereas the red color represents the primary mass response with the absorber. Vibration mitigation effect of the absorber can be seen from Figure 4(a) to Figure 4(b). It can be seen from Figure 4(b) that the response amplitude of the primary mass with the absorber is reduced more than twice with the proper values of the parameters. It should be stressed that higher values of these parameters correspond to longer arms of the tri-pendulum, which may be not very practical. Time history of the primary mass horizontal displacement [m] for λ = 0.1 m, ω = 1.1 rad/sec, μ = 0.03, d2 = 0.1 m2/s, v = 0.01 m/s, and different values of γ and h2.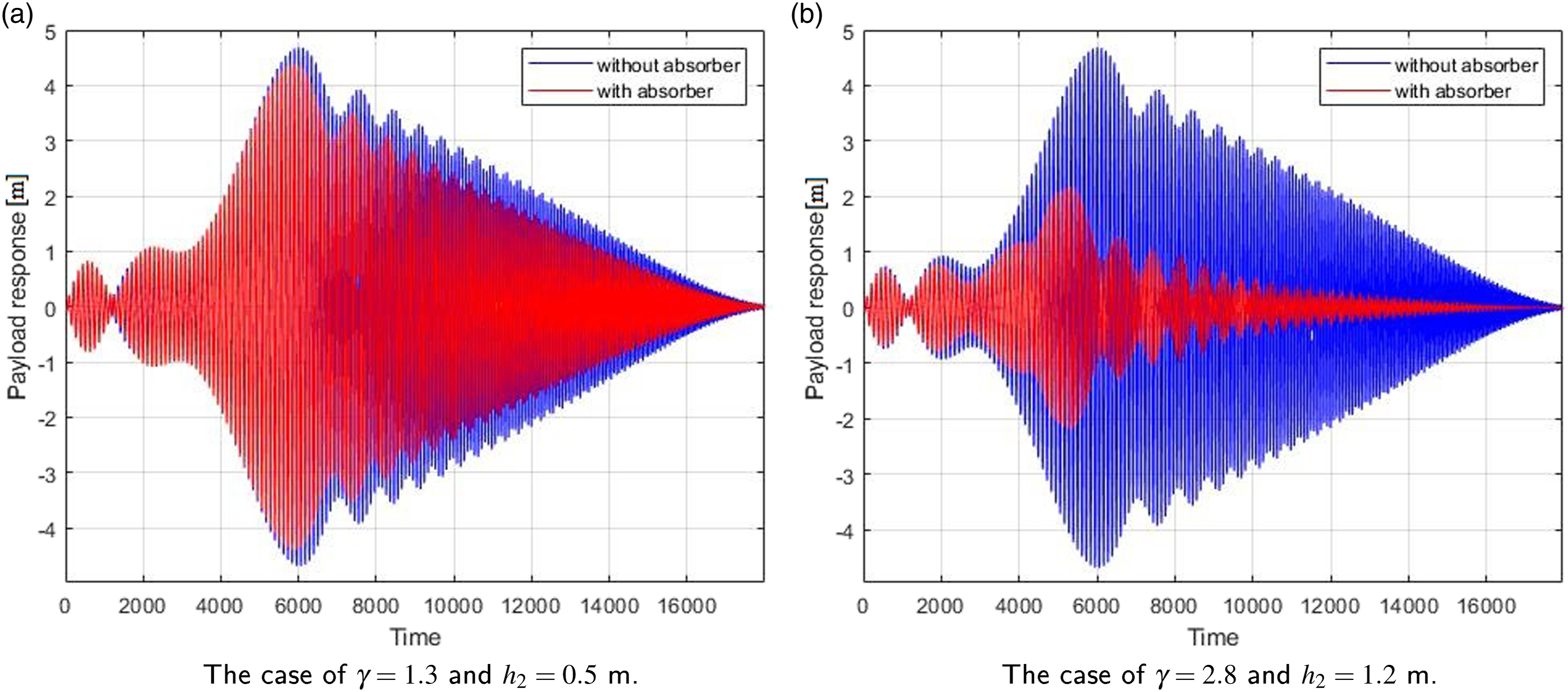
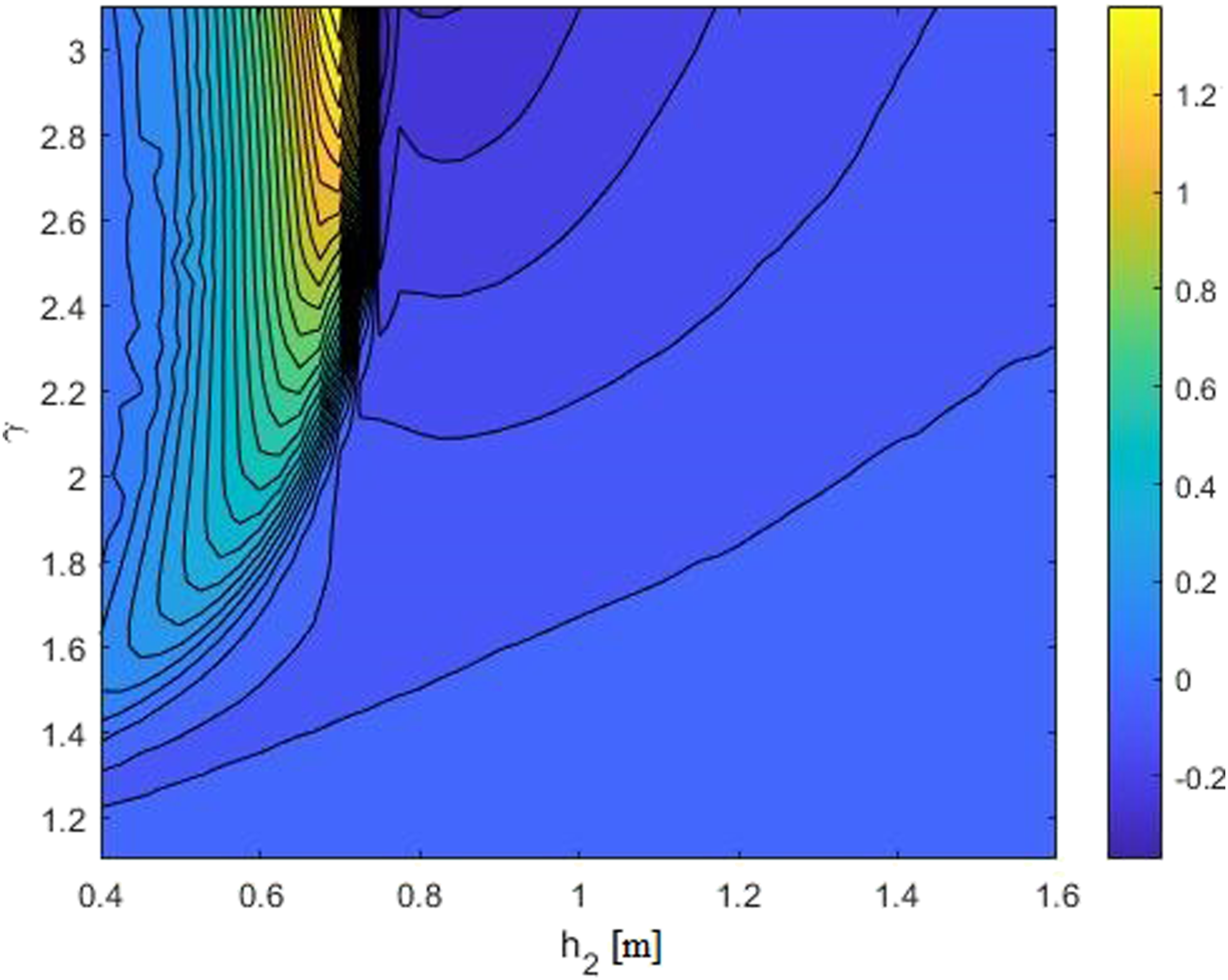
Figure 5 demonstrates the influence of μ on the primary mass response for ω = 1.1 rad/sec, λ = 0.1 m, and v = 0.01 m/s. As expected, one can see that with the increase of the absorber mass from μ = 0.01 to μ = 0.05, its effectiveness is improved. While the maximum suppression region is gradually widening from Figure 5(a) to Figure 5(b), it remains in the same position with respect to the horizontal axis. In Figure 6, one can observe an opposite trend of shrinking of that region with its gradual shifting to the left with the increase of ω. Difference in the horizontal response of the primary mass κ for different values of μ and λ = 0.1 m, ω = 1.1 rad/sec, d2 = 0.1 m2/s, and v = 0.01 m/s. Difference in the horizontal response of the primary mass κ for λ = 0.1 m, d2 = 0.1, and v = 0.01 m/s.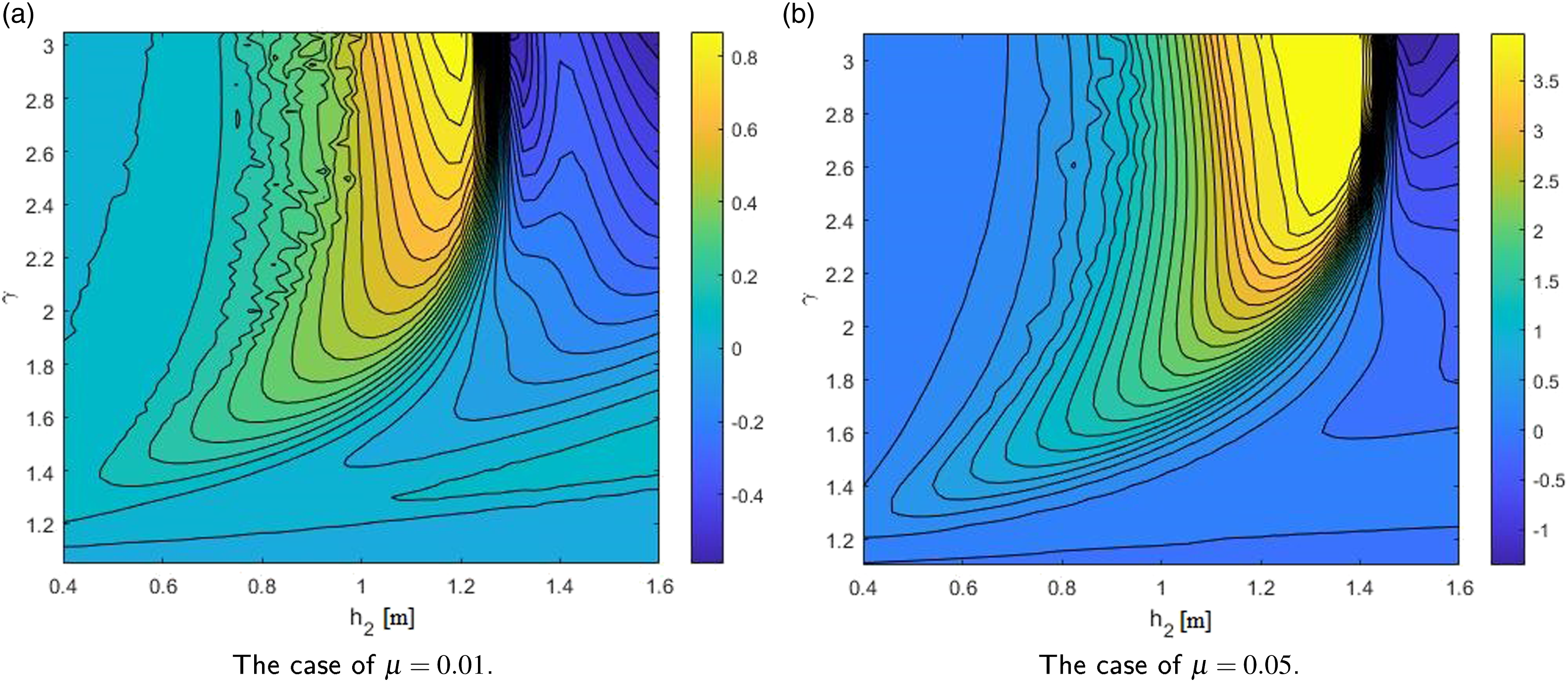
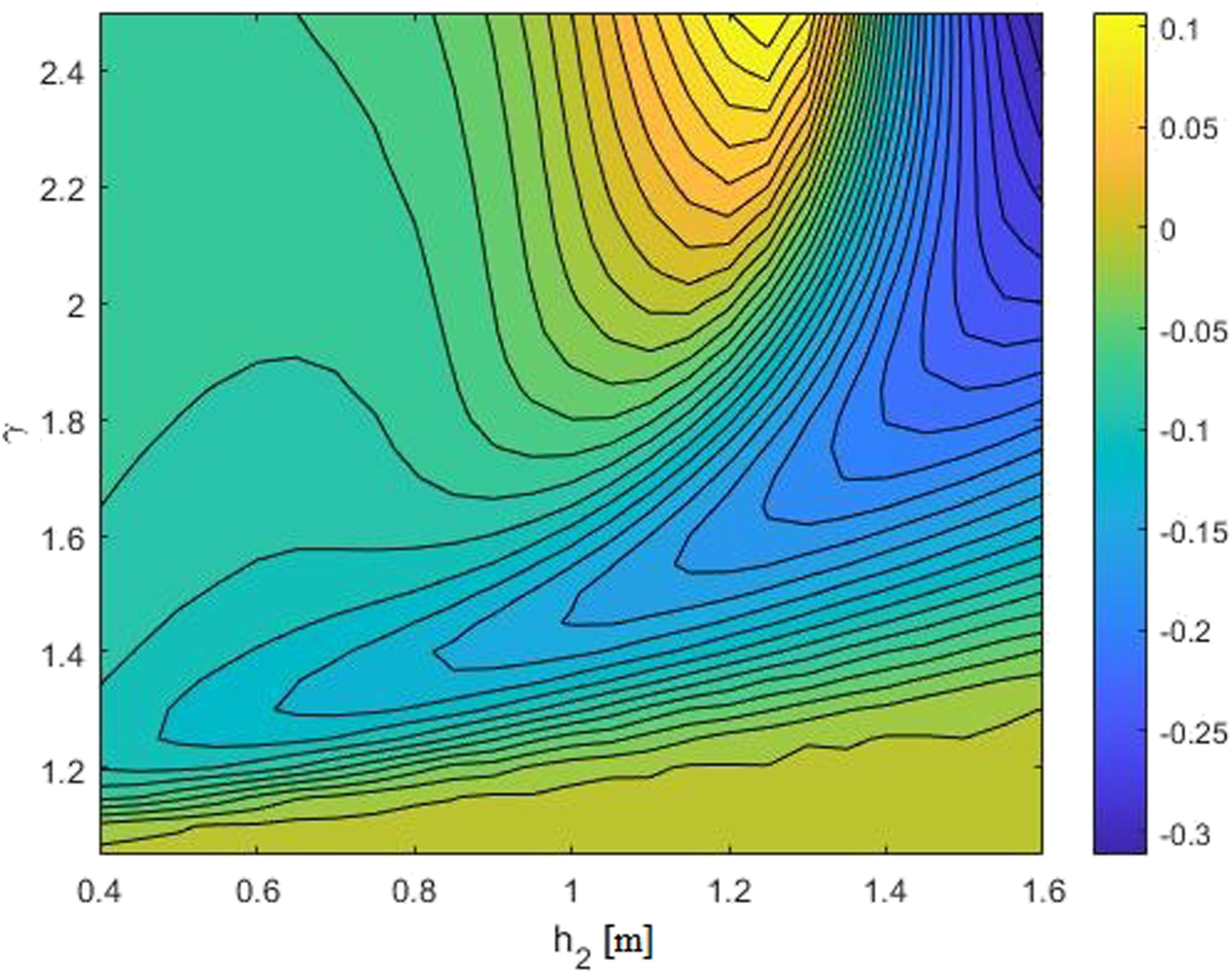
To provide a fair comparison of the accelerating primary mass to the previous case, it is assumed that the system will have a contact acceleration/deceleration. Under the assumption that these two intervals of acceleration and deceleration are equal in time, it is possible to derive the relationship between the mean velocity of the primary mass, its acceleration, and the primary pendulum length difference between the initial and final positions for the lifting-up operation Difference in the horizontal response of the primary mass κ for 
3. Optimization of the absorber performance
3.1. Optimization approach
As it has been demonstrated above, the tri-pendulum nonlinear absorber can effectively mitigate the primary mass vibrations in some cases. The purpose of this work is to implement a passive absorber, which neither requires any active control nor embedded sensors. In this case, it is believed that the excellent strategy would be to tune the absorber parameters based on the winch operating properties, that is, the winch’s velocity and acceleration only. It can be done by studying the response of the system for a given set of initial conditions, the system and excitation parameters, and then optimizing the systems’ response to provide the best overall result.
The goal is to find the tri-pendulum distances h1 and h2 (within given ranges) that minimize the mean oscillation energy of the primary mass. The objective function is specified as follows.
First, we take the sum of the corresponding terms in the representations of the kinetic and potential energies (3) and (4) and divide them by m + 3M for convenience, deriving the normalized energy of the primary mass
The term with 
It is also noted that the actual values of the external force parameters λ and ω and initial states
The main idea of surrogate optimization is to work with relatively simple interpolation or regression models built from objective function values at a limited number of sample points and update these models iteratively (Gutmann, 1999; Koziel and Leifsson, 2016). Such fast computable approximations of an objective function are called surrogates. For example, the corresponding implementation in the MATLAB Global Optimization Toolbox MathWorks© (2022) involves radial basis function interpolation for surrogate construction. The optimization algorithm searches for a global extremum and alternates between two stages. The first stage generates or updates a surrogate, while the second stage performs global optimization via the current surrogate, using Kriging algorithm (Chilan and Conway, 2019; Press et al., 2007).
For numerical simulations in this paper, we take

Values in (15) are taken to keep the tri-pendulum of relatively reasonable size so that at its maximum values, h2 = 1 m, whereas h1 = 1.5 m. It should be stressed that the condition h1 > h2 is imposed here to be consistent with the simulations conducted in the previous part. In fact, h1 may in principle be smaller than h2, and in this case, the bottom equilibrium position of the tri-pendulum will be unstable while the top equilibrium will become stable.
The mean energy (13) was averaged over a Halton quasi–Monte Carlo grid consisting of 100 nodes in the six-dimensional cuboid given by
The associated optimal distances h1 and h2 would probably not be the best for particular values from λ, ω, and
4. Numerical simulations
A set of the numerical optimizations is performed for the case of the primary mass constant lifting-up speed, a fixed set of parameters without an averaging and with an averaged procedure over the specified above range of parameters λ, ω, and The case of a constant lifting-up speed.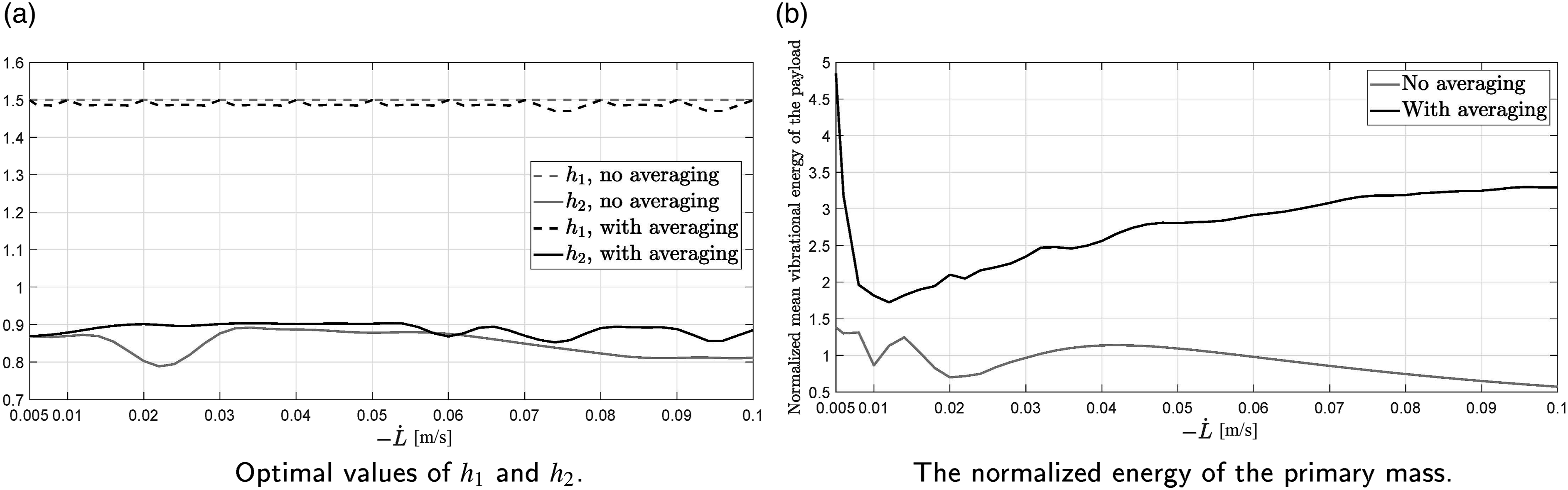
It can be seen in Figure 8(a) that over the presented range of the lifting velocities, the optimal values of h1 are almost the same; however, there is some difference in the optimal values of h2 for some values of the lifting-up velocity. For instance, the difference in the optimal values of h2 can be observed when v = 0.02 m/s. Figure 8(b) demonstrates the graphs of the primary mass normalized energy as a function of the primary mass velocity for the two cases as in Figure 8(a) and optimal values of h1 and h2.
Figure 9 presents the results of the optimization for the case of the constant lifting-up velocity and different values of the absorber damping d2. It can be observed from Figure 9 that there is a significant difference in the results of the normalized primary mass energy near the very slow or quasi-static values of the lifting-up velocity. The optimal values of the normalized primary mass energy as a function of the lifting velocity averaged over λ, ω, 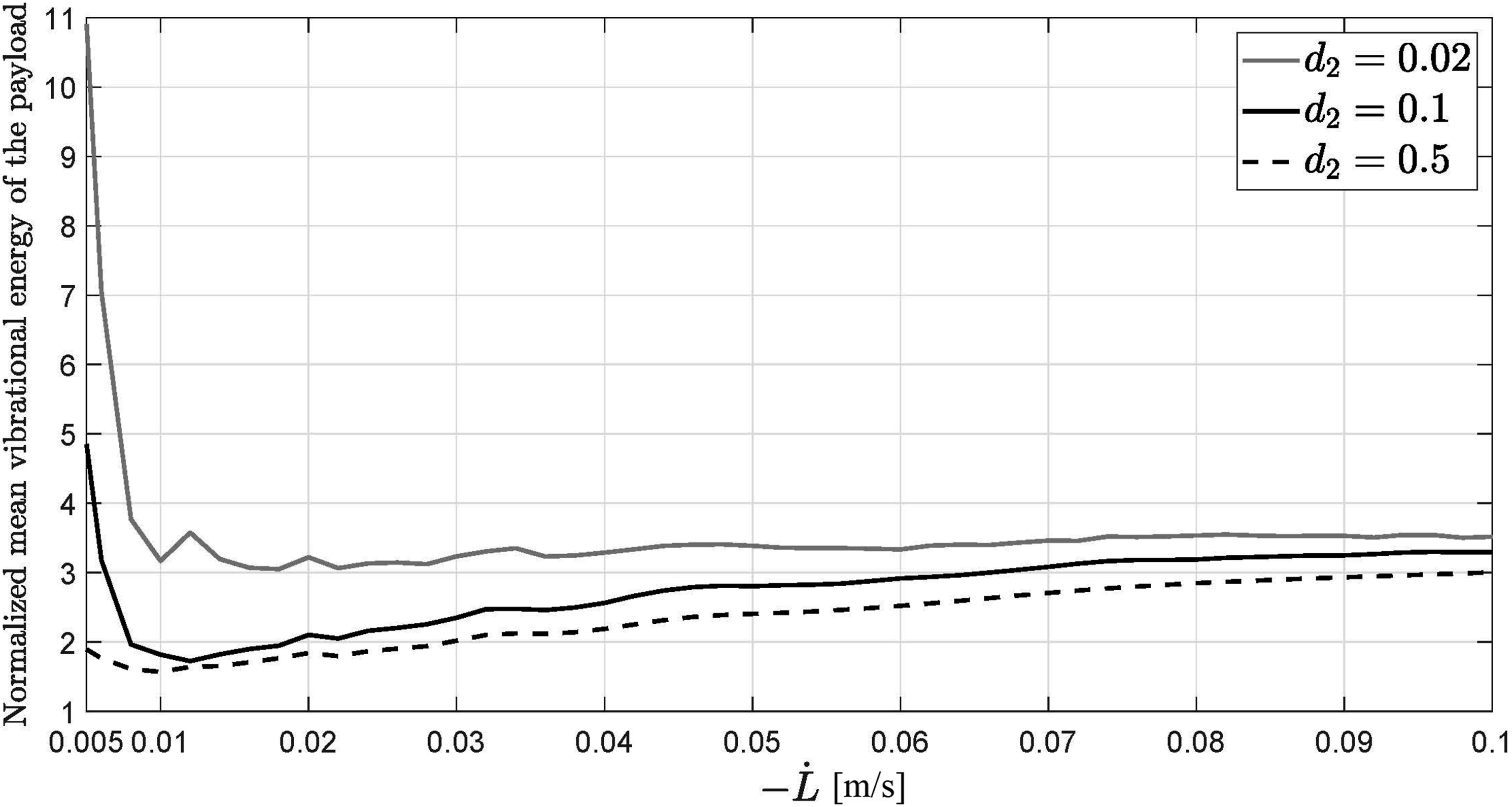
Next set of figures demonstrates the results of the optimization for the case of the accelerating and decelerating primary mass according to (11). Figure 10(a) demonstrates the results of the optimization for the optimal values of h1 and h2, where h1 is suggested to remain the same. However, the optimal value of h2 becomes very low, around 0.2 m, when the mean speed goes above 0.06 m/s, although for the lower values of the mean velocities, the situation is different. The case of constant acceleration/deceleration of the primary mass.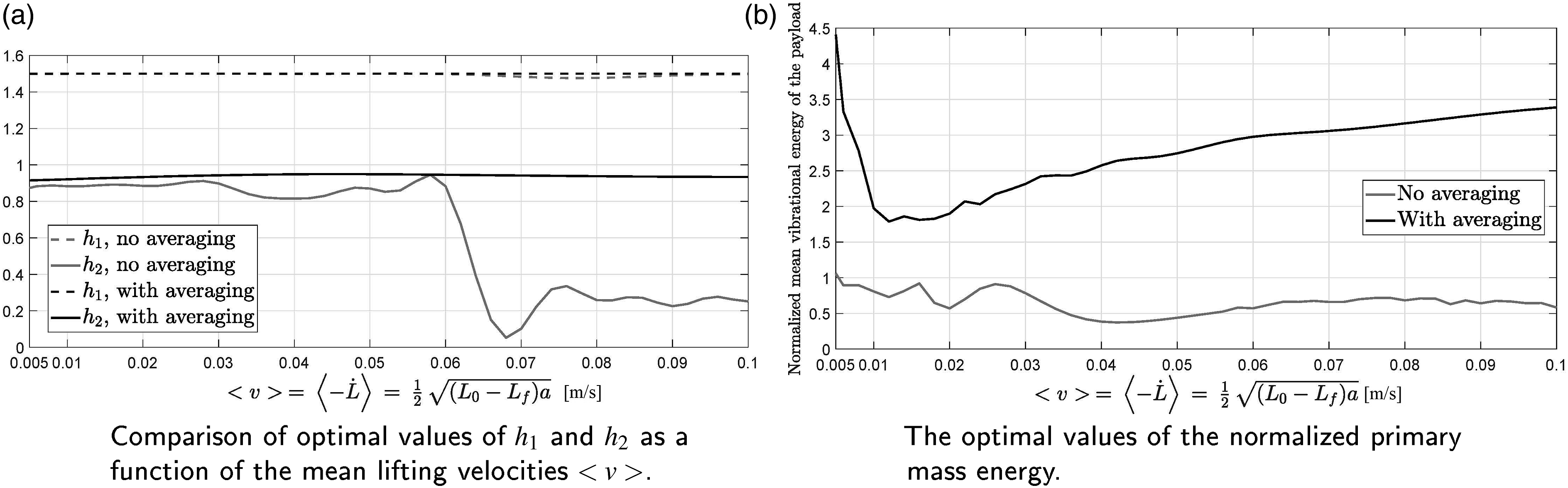
Figure 10(b) presents the results of the normalized energy of the primary mass as a function of mean velocity for different values of the absorber damping averaged over the range of λ, ω, and
5. Conclusion
In this work, a tri-pendulum nonlinear absorber was proposed to mitigate vibrations of the primary lumped mass pendulum. The lifting motion of the primary mass, with either a given speed or a given acceleration/deceleration, was accounted for by introducing a time-dependent pendulum’s length. 2D maps constructed in the γ − h2 space have shown the performance of the absorber based on the selected values of the system’s parameters. It has been shown that the maps have a prominent suppression region, where the vibrations of the primary mass are mitigated substantially. However, there are regions where the vibration suppression is not significant or the absorber has a negative effect on the primary mass, resulting in a larger response amplitude of the latter. These investigations have also demonstrated the following effect of the system’s parameters: • the larger the lifting velocity of the primary mass, the lower the vibration mitigation effect of the tri-pendulum absorber; • the higher the damping of the tri-pendulum, the wider the maximum suppression region; however, it also moves up to larger values of γ; • the larger the mass ratio, the better the vibration mitigation performance of the absorber; and • the longer the absorber arms, the higher the effect of vibration mitigation.
Using the surrogate optimization approach, we have studied the absorber performance within a reasonable restricted set of the absorber parameters, namely, the arm lengths. The numerical results have been obtained for a fixed set of the initial conditions as well as by averaging over some set of these parameters. The numerical results of the optimization have demonstrated excellent performance of the nonlinear absorber when it is tuned. Moreover, the paper has demonstrated the feasibility of the proposed tuning strategy, which does not require any active control at all.
Footnotes
Acknowledgement
This work is supported by the Fishery Engineering and Equipment Innovation Team of Shanghai High-level Local University.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.