
Abstract
Weak bearing fault feature extraction (FFE) research has previously focused on bearing fault signal of transient impulse extraction whereas higher harmonic feature extraction of fault feature frequency aspects are relatively less. While traditional envelope demodulation method has certain limitations to capture the rolling bearing fault characteristic frequency of higher harmonic. To this end, combining adaptive chirp mode decomposition (ACMD), improved maximum correlation kurtosis deconvolution (IMCKD), and 1.5-dimensional Teager energy cyclo-stationary spectrum (1.5-DTECS), in the current work we propose a three-stage defect detection system. The performance of the proposed method is evaluated by analyzing the three-stage FFE (STFFE) of multiple kinds of rolling bearing fault data. The findings reveal that the three-stage fault detection approach successfully suppresses noise, highlights the fault impact, and extracts the higher order harmonics of the bearing defect characteristic frequency more effectively. The research contributes to the field of bearing fault high harmonic component extraction and provides guidance on techniques related to the extraction of bearing impulse characteristic.
Introduction
Amongst the most critical components in rotating machinery are rolling element bearings (REBs), such as in motors, generators, gearboxes of high-speed railway engines, wind-turbines, etc. High-quality, healthy bearings can ensure the working accuracy of the rotating shaft. With the weak damage to REBs, the vibration signal will have a cyclic impulsive characteristic accompanying rotation of the defective bearing, which will affect the operating status of the equipment. Therefore, condition monitoring and early identification of faults in rolling bearings are essential for the stable operation of the equipment. Meanwhile, due to the fact that the impulse generated by early bearing faults is quite weak and sensitive to interference from noise and complex transmission paths, which makes the extraction of their fault features complex. Thus, to effectively reduce the noise of fault signal and enhance the weak impulse components are critical for conducting early fault diagnosis to bearing components (Huang et al., 2018, 2019; Inturi et al., 2019; Li et al., 2019; Zhang et al., 2022).
Failure signals in REBs are non-stationary, for such signals, a number of scholars have proposed methods (Lv et al., 2022). Among them, empirical mode decomposition (EMD) (Jiang et al., 2016; Li et al., 2022), ensemble empirical mode decomposition (EEMD) (Wu and Huang, 2009), empirical wavelet transforms (EWT) (Gilles, 2013), and alternative time-frequency analysis methods have been adopted extensively. However, each of these solutions has its own limitations and is easily susceptible to noise interference due to the dynamic and complex working environment of rotating machinery. Huang established an adaptive signal time-frequency analysis approach called EMD (Qin et al., 2019). For many applications, the approach has produced excellent results by representing non-linear and non-stationary signals as a sum of physically averaged time-frequency components. Unfortunately, EMD often presents the modal mixing problem in its execution, that is, Intrinsic Mode Function (IMF) lost features at a single feature scale, which makes feature extraction, model training, and pattern recognition more difficult. Variational mode decomposition (VMD) method (Dragomiretskiy and Zesso, 2013), which estimates IMF by solving the frequency domain variational optimization problem. It decomposes the signal adaptively into K decomposition modes while eliminating the disadvantage of mode mixing, but the parameters K and the balance factor α affect the processing effect of VMD; incorrect choice of K can lead to excessive or inadequate decomposition. Some investigators (Chen et al., 2017) recently proposed Variational Nonlinear Modulation Mode Decomposition (VNCMD), an extension of VMD for decomposing signals containing broadband nonlinear frequency modulation (FM) components. VNCMD, like VMD, uses joint optimization methods to estimate all signal components at the same time. The issue is that the number of IMF components beneath the signal must be known ahead of time. After modification, Chen et al. (2019) developed numerous strong and simple time-frequency analysis techniques relying on ACMD, which can generate high-quality TFRS for rapidly changing signals with very close or the overlapping modes. Despite ACMD-based approaches have been used in a variety of sectors (Chen et al., 2020), neither any reports of its use in bearing weak defect detection have been published. Given the complicated interference introduced by bearing fault data gathering, it is required to considerably increase the flexibility and pertinence of ACMD algorithms during detection.
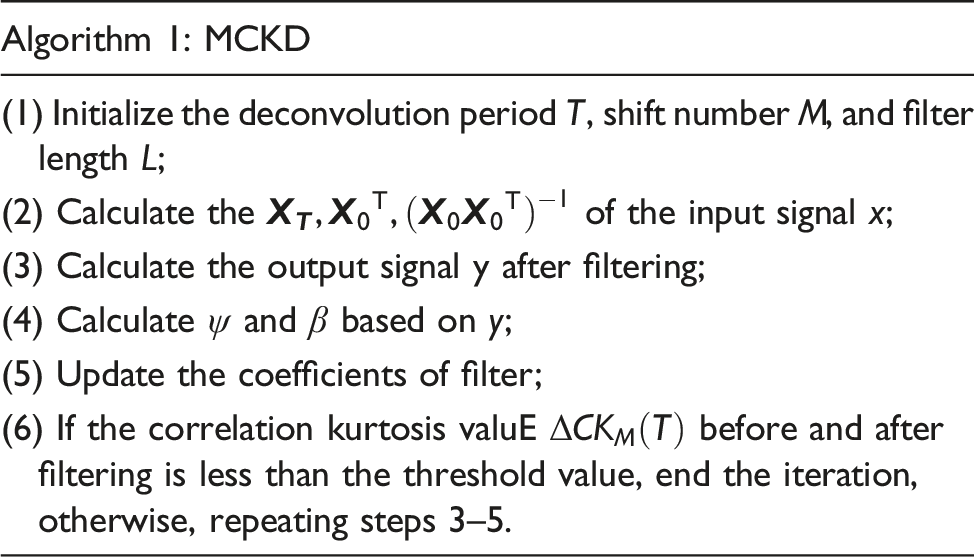
Furthermore, its initial rolling bearing fault signal transmission might well be thought of as a linear convolution mixing process of the impulse signal and transmission path, in contrast, the acquisition of fault impulse signal is a deconvolution process. In this regard, minimum entropy deconvolution (MED) has been proposed by Wiggins (1978), which repeatedly picks the finite pulse filter to reduce the information entropy after filtering on the basis of blind deconvolution. In practical applications, this strategy is applicable employed. The MED method, on the other hand, is only responsive to a single shock and works poorly in the case of periodic shocks. The maximum correlation kurtosis deconvolution (MCKD) proposed by McDonald et al. (2012), is an algorithm for enhancing the periodic components in a signal by using the correlation kurtosis as a merit-seeking indicator and calculating the best filter through iteration, thus, the fault characteristics of the filtered signal are more distinct and have extensive applications for the field of bearing fault diagnosis. MCKD, on the other hand, has very rigorous parameter setting requirements. IMCKD algorithm (Miao et al., 2017), which can effectively solve the problem that the deconvolution period of the fault signal is difficult to set, and its effectiveness and superiority are proved by experiments. Only by ensuring the accuracy and reasonable use of these parameters can the reliability of MCKD fault impulse extraction be highlighted. As a result, research into MCKD parameter selection is required. In recent year, some optimization strategies have been suggested to determine its parameters (Li et al., 2021; Zhou et al., 2021).
In the three-stage approach proposed to this article, the mode selection and signal reconstruction solution based on the correlated Gini (CG) metrics (Miao et al., 2021) is integrated in the ACMD algorithm, which can separate different failure modes in the presence with intensive noise interference. Secondly, optimization of the deconvolution period T, shift number M, and filter length L using IMCKD method to obtain a better match separated signal mode, and based on this, the fault pulse in the signal component is enhanced; finally, the bearing fault features are extracted using 1.5-DTECS. Overall, this method can adaptively enhance the impact component of weak faults as well as effectively extract the higher-order harmonics of weak impulse components under strong noise interference.
The remainder of this paper is structured as follows: In the Basic theory section, a brief description of the fundamental theory about adaptive chirp decomposition and improved MCKD is mentioned. In the A three-stage fault diagosis method section, the method for rolling element bearing fault diagnosis is presented and it also describes the experimental steps. In the Experiment 1 IMS bearing dataset section 4, a numerical analysis based on bearing fault data is applied to demonstrate the efficacy of the proposed method. Finally, the conclusions are drawn in the Conclusion section.
Basic theory
ACMD
ACMD is a powerful method for the decomposition of period-dependent signals. Its main advantage is its ability to solve signals with strong time-varying modulation characteristics. ACMD solves the following optimization problem with the objective of minimizing the demodulated signal bandwidth








More details about ACMD please refer to Chen et al. (2017).
MCKD
In essence, MCKD means creating a FIR filter to recover a continuous impulse signal that has been drowned out by noise, MCKD adopts the correlated kurtosis (CK) as the objective function (OF), which captures both to periodicity and impulsivity of the signal, CK is defined as
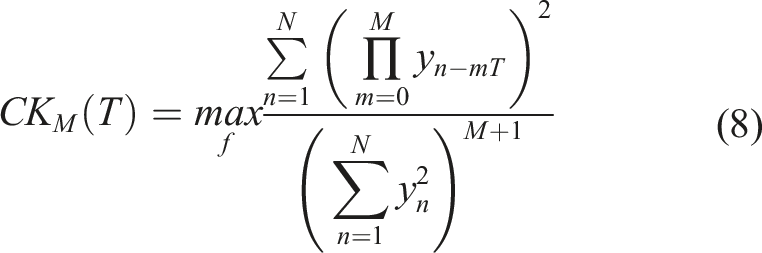

For more details about MCKD algorithm, please refer to McDonald et al. (2012).
A three-stage fault diagnosis method
A targeted three-stage detection method was developed to address the challenges in bearing fault detection. Among the suggested methods, an improved ACMD method to separate fault signature signals under strong interference has been applied; a modified MCKD method was implemented to achieve the higher accuracy of enhanced periodic fault features; and finally, the cyclo-stationarity spectrum of the 1.5-dimensional Teager energy (1.5-TDE) was obtained. The principle and implementation of each step is elaborated in the following subsections.
CGACMD
Due to the wideband characteristics of impulse signals, the ACMD may have the problem of over-decomposition in practical applications, which means, ACMD probably separates a single pulsed signal into multiple frequency bands. To address this issue, the robustness of CG metrics under disturbing conditions was used to improve the efficiency of rolling bearing fault detection (Miao et al., 2022; Wang, 2018), this paper uses ACMD in combination with CG metric (CGACMD), which for each IMF is used to remove unnecessary information and recombine the valid information. CG is expressed as
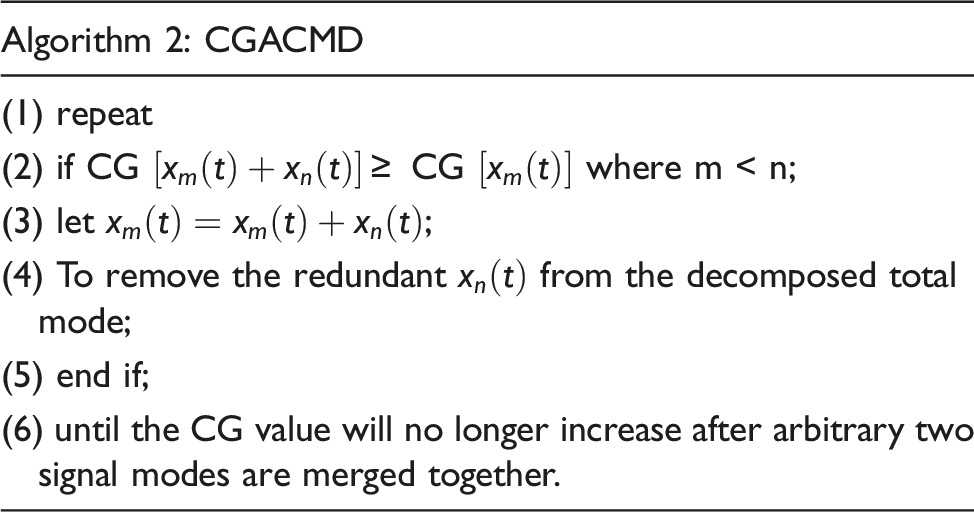
The flowchart of CGACMD in Figure 1. The flowchart of CGACMD.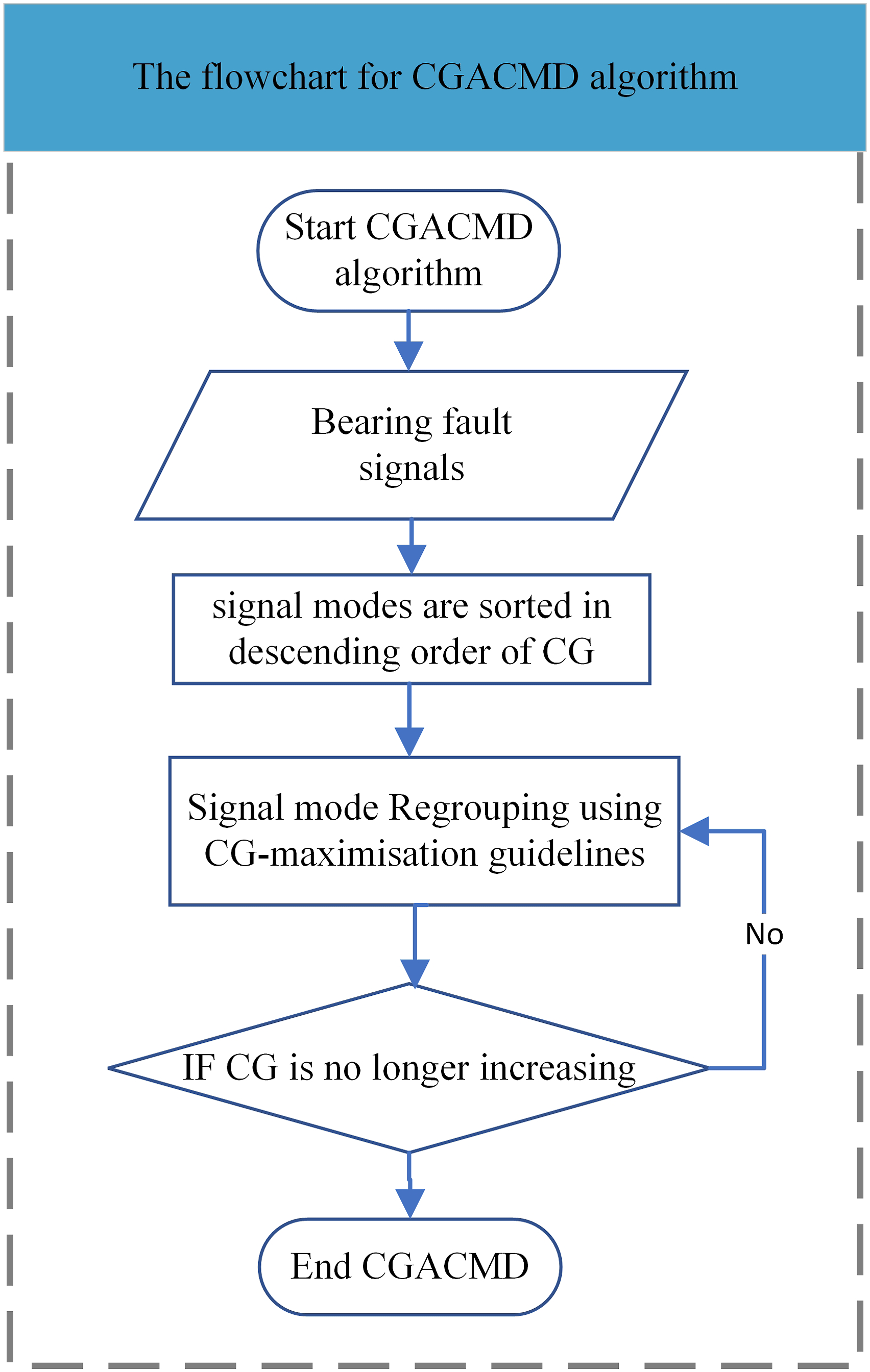
Improved MCKD
In this study, the parameters in the MCKD algorithm were optimized using the Reptile Search Algorithm (RSA) (AsgharHeidari et al., 2019). RSA models the algorithmic process of finding an ideal solution using the hunting behavior of crocodiles. When using the RSA algorithm to optimize the three parameters in MCKD (filter length L, deconvolution period T, and shift number M), fitness function needs to be determined first, and then the optimal solution is judged according to the size of the fitness. In this paper, Reciprocal of crest factor of envelope spectrum (RCE) is used as the fitness function, where crest factor of envelope spectrum (EC) is a dimensionless indicator used to detect the component and intensity of periodic impacts of a signal (Cheng et al., 2019). Assuming that the signal envelope spectrum sequence is X(n) (n = 1, 2, …, N), its REC is denoted as
The range of MCKD method influence parameters L, T, and M is defined as the population search space of the RSA algorithm, the mathematical expression for T is
In this paper, we initially assume that the crocodile population size is 30, with a maximum number of iterations of 500, and each algorithm operates 30 times individually. Then, respectively, set the parameter range for L is [101, 500] (
This method is shown in the flowchart in Figure 2. The flowchart for IMCKD.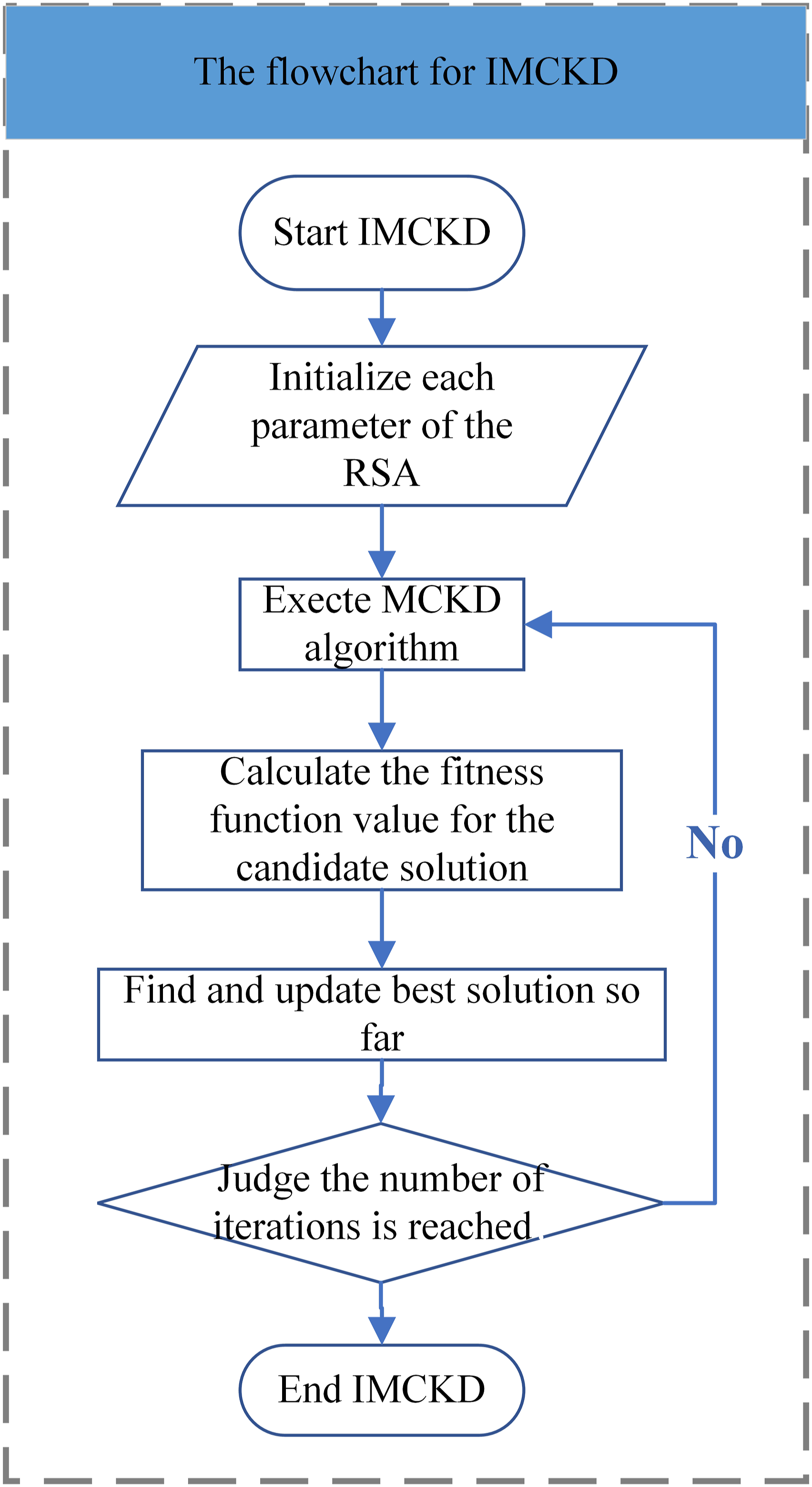
1.5-DTECS
Cyclo-stationary of degree
The cyclo-stationary (CS) process is a random process with periodic statistical characteristic parameters. The amplitude modulation period signal is a particular type of cyclo-stationary signal (CSS), and its can be demodulated by using the CS analysis method. REBs fault signal is a CSS, and its CS characteristics are already used for fault diagnosis of REBs (Chi et al., 2019).
The second-order cyclo-stationary analysis method represents a useful method for demodulation of rolling bearing fault signals, and the cyclic auto-correlation function of 
1.5-dimensional spectrum
For the diagonal slice 
The 1.5-dimensional spectrum has the characteristics of suppressing white Gaussian noise, extracting non-linear coupling features, improving the signal-to-noise ratio, and it offers significant strengths in the analysis nonlinear signals.
Teager energy operator
A nonlinear difference operator, energy operator, can quickly and accurately track the transient changes of the signal, which can strengthen the transient characteristics as well as the effective detection on the pulse component of the signal, which is suitable for the shock feature enhancement of rolling bearing failure (Potamianos and Maragos 1994).
For continuous signal 
Proposed 1.5-DTECS
We acquire the 1.5-DTECS, which is the ultimate detection result, by mapping the 1.5-dimensional TEO of the amplified fault signal in the DCS spectrum. 1.5-DTECS effectively suppresses noise components and highlights fault shocks. According to the above derivation, the 1.5-DTECS can be mathematically defined as
Fault diagnosis methods in this article
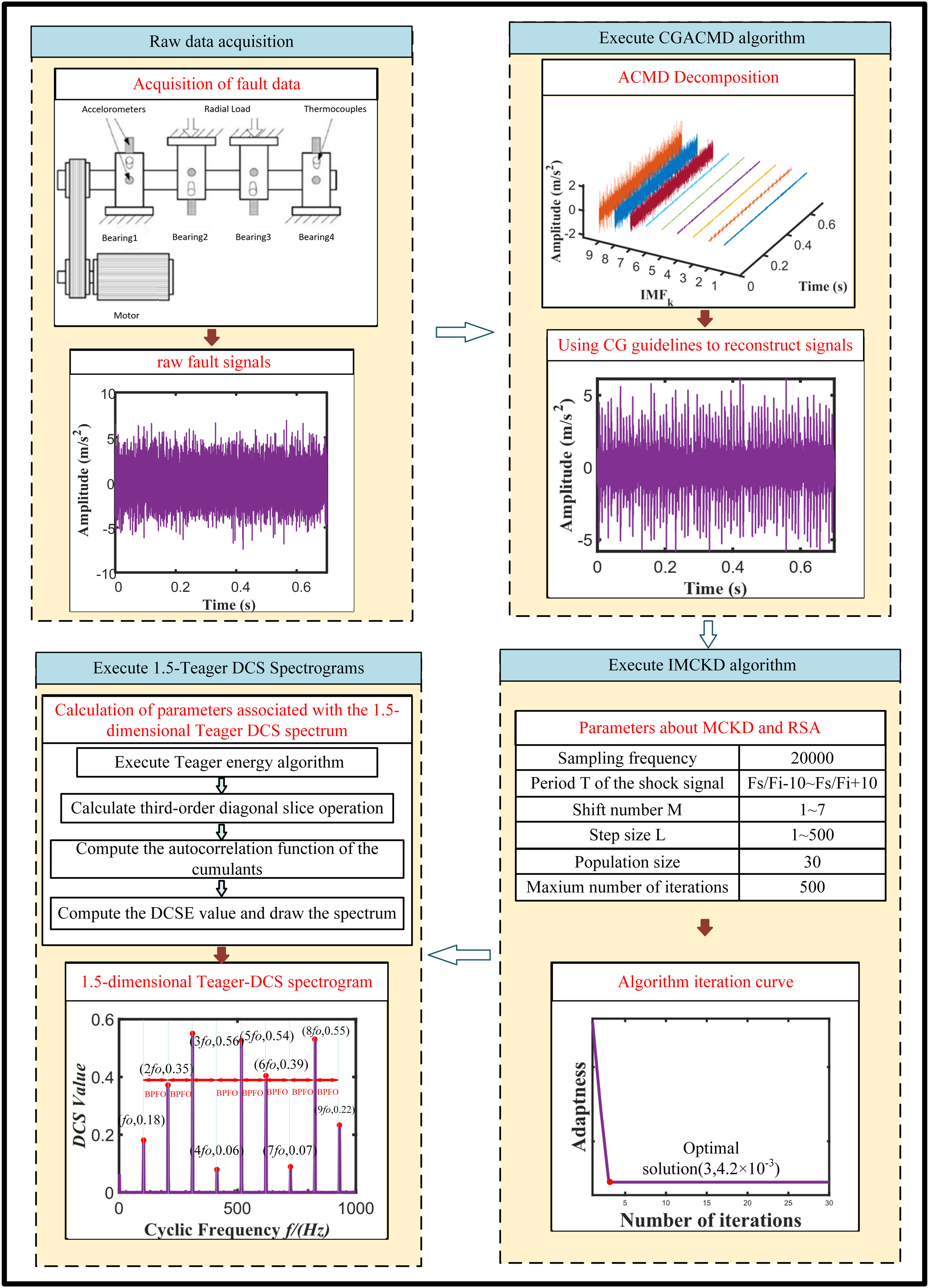
Aiming to overcome the problems of weak rolling bearing fault signal and difficult FFE within strongly noisy and fuzzy transmission paths, a three-stage FFE (STFFE) using ACMD and CG metrics, improved MCKD and 1.5-DTECS is proposed. The specific process of the three-stage approach is presented in Figure 3. The main flowchart of the three-stage detection in Figure 4. The flowchart of three-stage fault diagnosis. Flowchart of the three-stage detection method.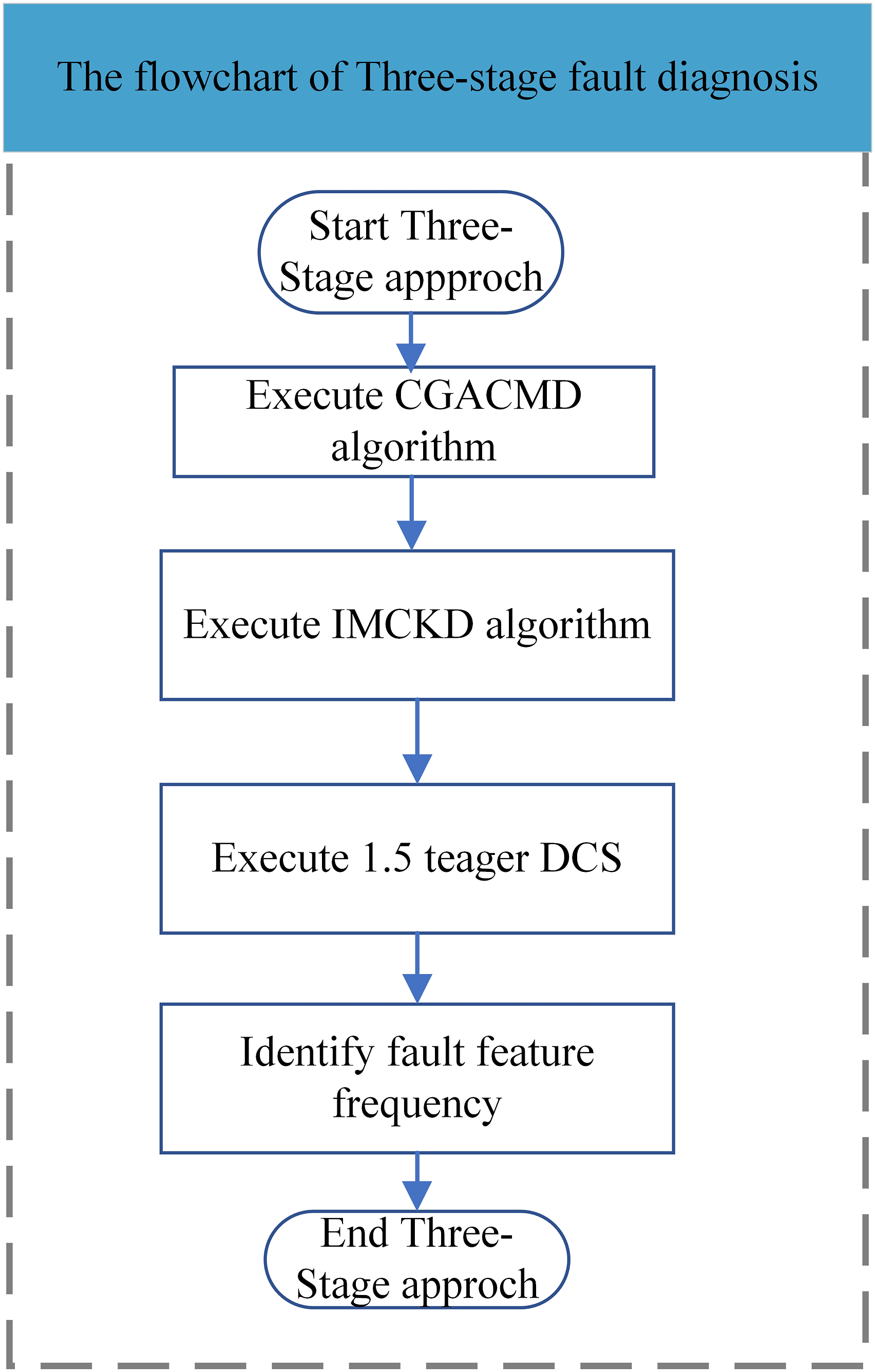
Experiment 1 IMS bearing dataset
Introduction to the experimental environment and dataset
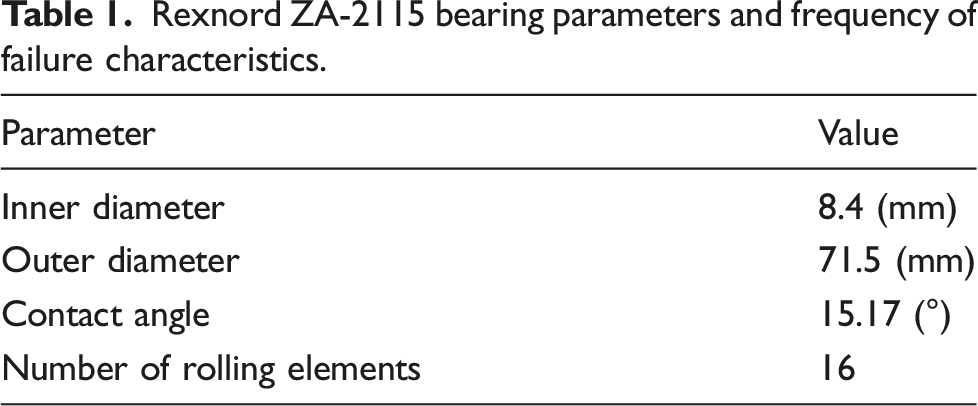
University of Cincinnati’s publicly available full life bearing dataset (Zhou et al., 2019) was used to validate the STFFE method. Figure 5 shows bearing data acquisition station, which is primarily a motor-driven spindle rotation via a belt pulley. Spindle is supported by four Rexnord ZA-2115 REBs. REBs components have their own FCF, for instance, the ball pass frequency of outer race (BPFO), the ball pass frequency of inner race (BPFI), and ball pass frequency of rolling element (BPFR). (Specific dimensional parameters and different fault characteristic frequencies are shown in Tables 1 and 2). Spindle with a fixed speed of 2000 RPM with an additional pressure of 6000 N. Four bearings mounted on the same driveshaft are considered as a group, and the data collection continues a serious failure occurs in any one of the four bearings. The experiment contains three test cases: Bearings 3 and 4 fail in test Case 1 due to an inner race failure and a rolling element failure, respectively; in test Case 2, bearing 1 has an outer ring fault; while bearing 3 has an outer race failure in test Case 3. An experimental analysis of data from test Case 2 will be carried out in this section. The total duration of test Case 2 experiment is 164 h, the initial 9000 sampling points at the 5300th minute of sampling time are taken and the time domain waveform (TDW) and envelope spectrum (ES) are plotted as shown in Figure 6 (white noise has been added). Bearing data acquisition station. Rexnord ZA-2115 bearing parameters and frequency of failure characteristics. The theoretical FCF. TDW and ES of weak fault signal. (a) TDW. (b) ES.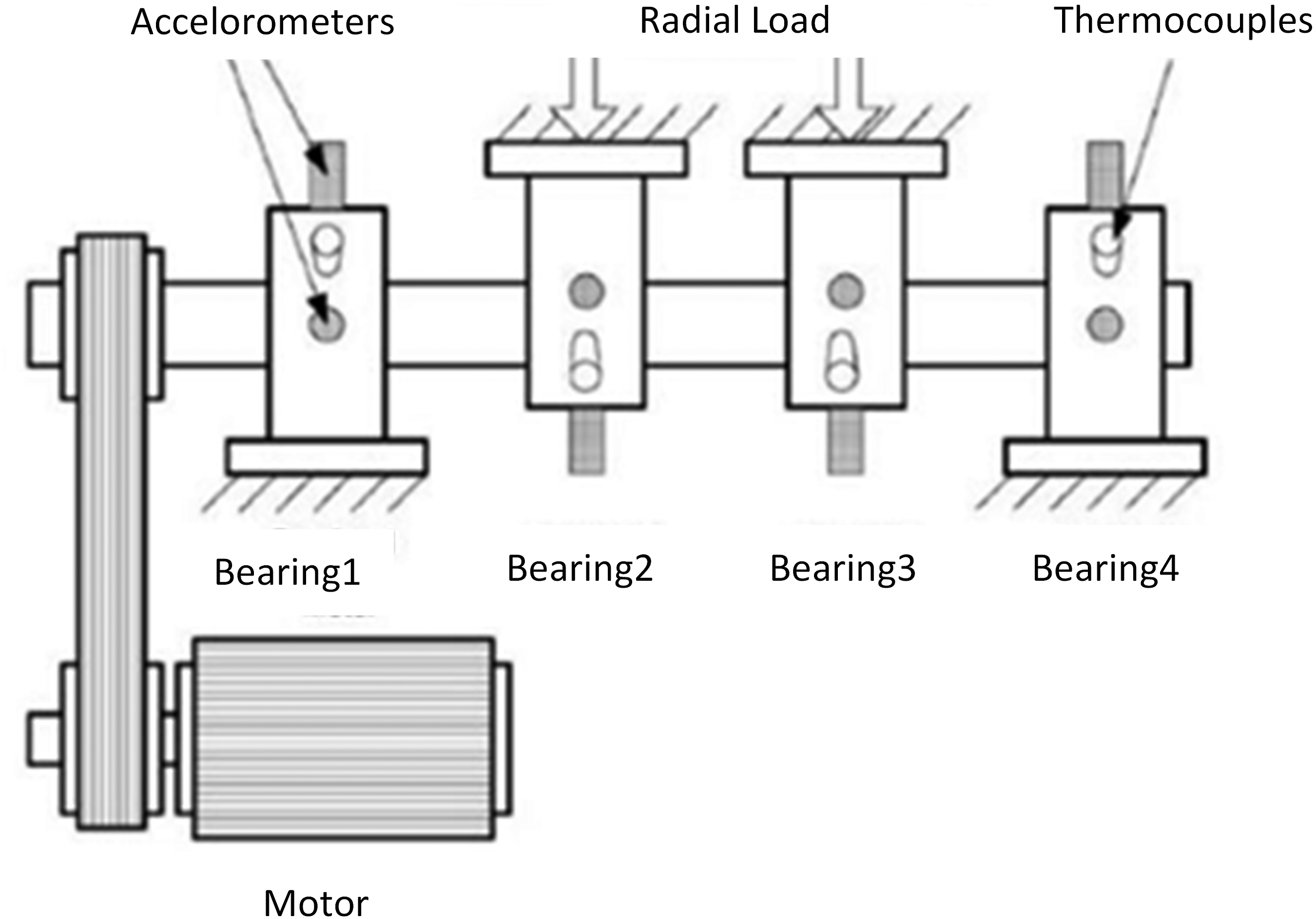
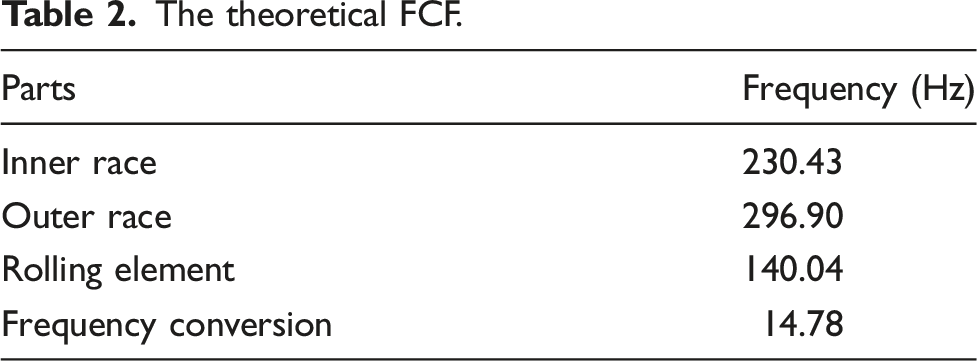
As shown in Figure 6(a), the presence of more meaningless external noise interference, with weak fault impulse characteristics and no significant periodic component. Similarly, in Figure 6(b), frequency components are disordered and no useful information for outer race fault diagnosis, which indicates that fault features cannot be sufficiently extracted using traditional methods. According to the above analysis, this paper focuses on the acquisition of weak fault information. The proposed STFFE is applied to the fault diagnosis of REBs as follows.
Experiment results and analysis
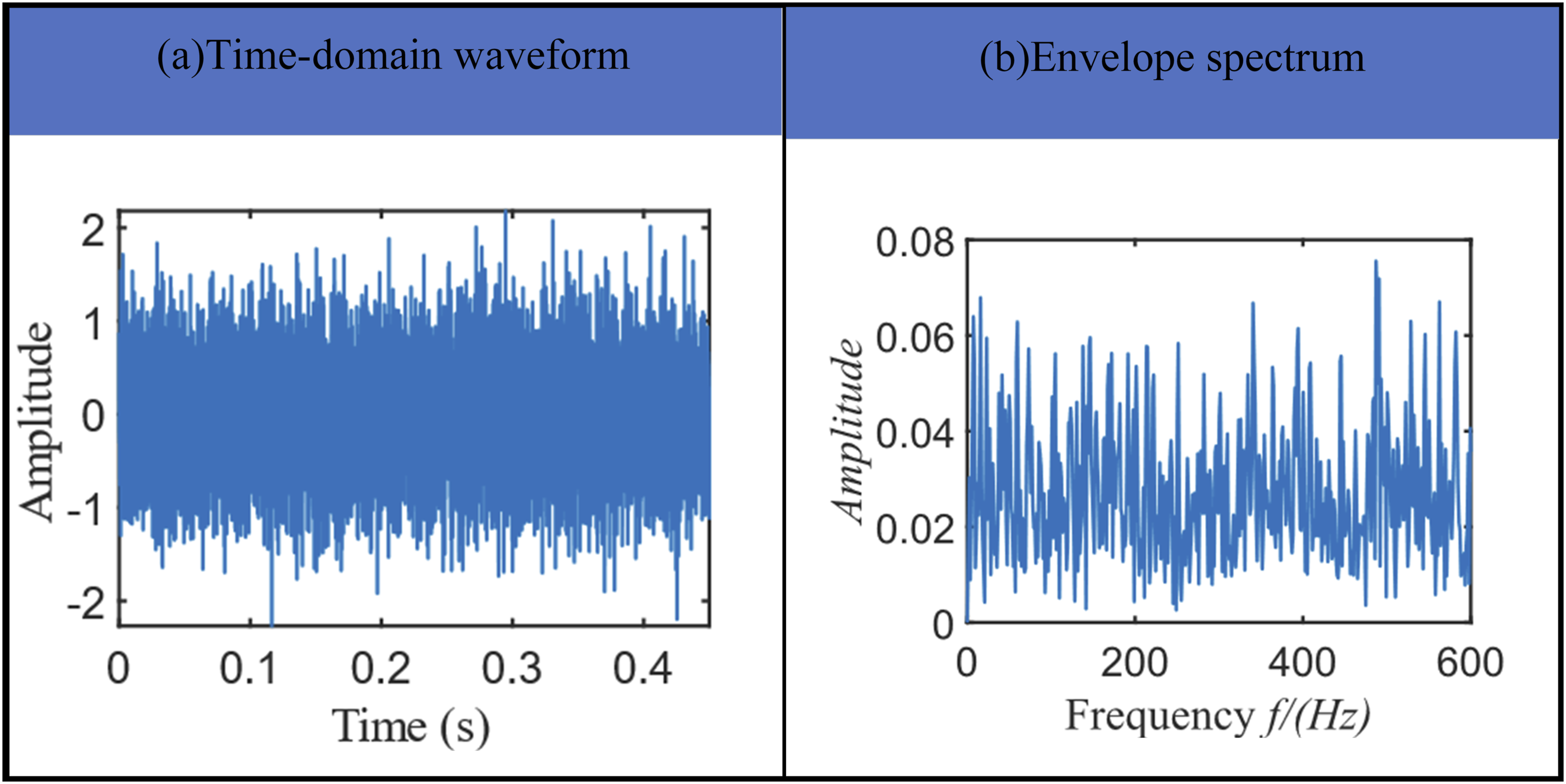
The STFFE utilized for extracting the fault features from the weak fault signal (WFS) located in outer race in Figure 6. Table 2 shows the BPFO is 230.4 Hz. According to equation (12), the initial period T of deconvolution in IMCKD was calculated to be 67.6. As the frequency band chosen is excessive, it will increase the seeking time of parameter T and reduce the calculation efficiency; if the frequency band chosen is excessively small, it may not include the FCF. To ensure the signal decompose completely and the calculation efficiency, the range of T in IMCKD was set to [58, 78], the seeking range of filter order L was set to [101, 500], and seeking range of M was set to [1, 7]. The experiment of outer race fault diagnosis with the three-stage method is in Figures 7 and 8. Obtained experiment results of outer race. (a) Mode decomposition signal of each order of outer race. (b) Reconstructed signal after filtering by CG features. Obtained experiment results of outer race. (a) Algorithm iteration curve. (b) 1.5-DTECS.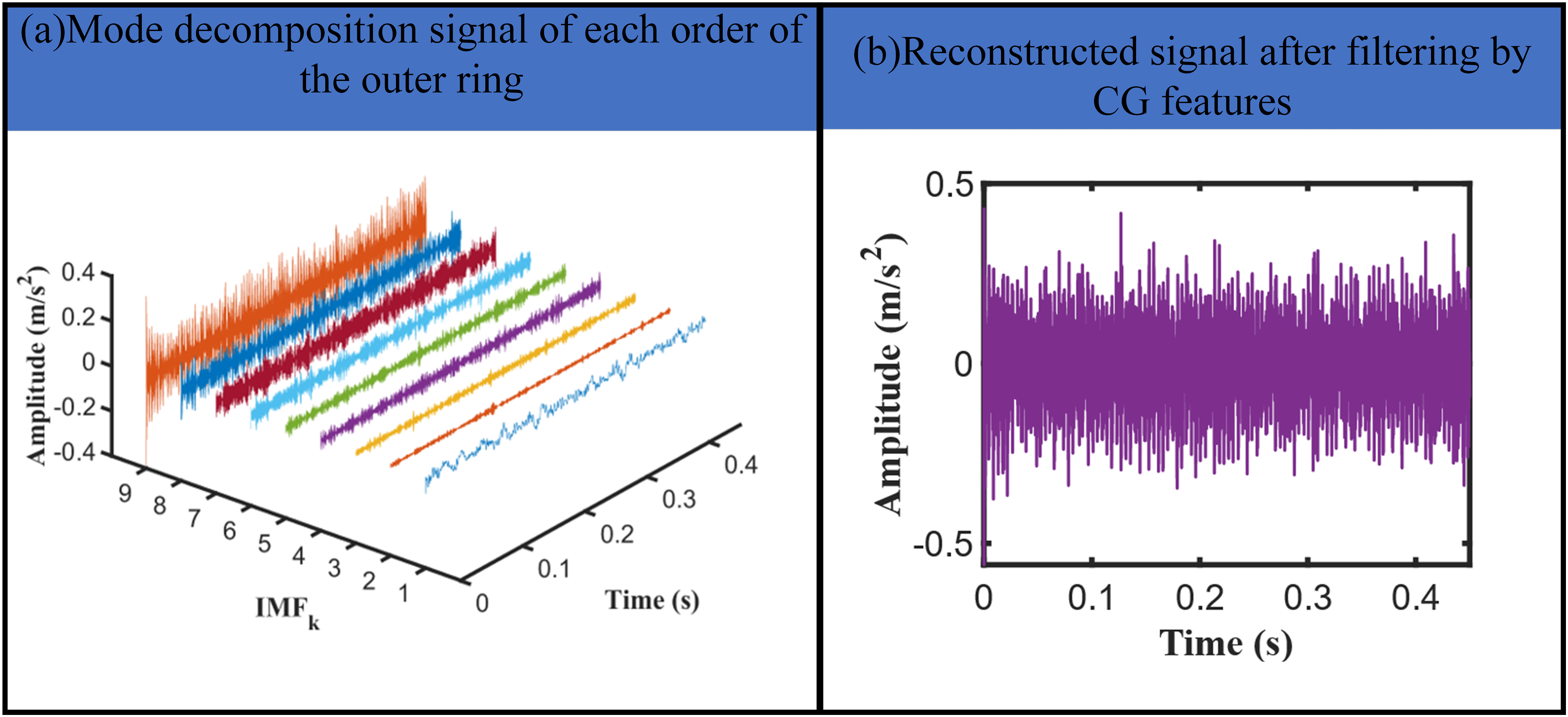
The ACMD is applied to decompose the outer race signal into the time-domain waveforms of each order in Figure 7(a); Figure 7(b) shows the reconstruction of signal by removing the noise from each order time-domain waveform using the CG maximization guidelines; Figure 8(a) shows the curve of the variation of the fitness function with the number of population iterations in the IMCKD algorithm. It can be observed that the RSA algorithm converges at the 21st iteration. At this point, MCKD is able to take the best combination of [65, 128, 3], that is, the algorithm obtains the optimal combination of parameters with T = 65, L = 128 and M = 3. The optimal parameter combinations are imported into the MCKD algorithm used to obtain 1.5-DTECS after optimal IMCKD processing, illustrated in Figure 8(b).
The impulse component can be observed in Figure 7(b). In Figure 8(b), BPFO and its 2-fold frequency, 3-fold frequency, and 8-fold frequency spectral lines in 1.5-DTECS are clearly visible, indicating that the characteristic frequency is extracted successfully, which verifies the correctness of the proposed method.
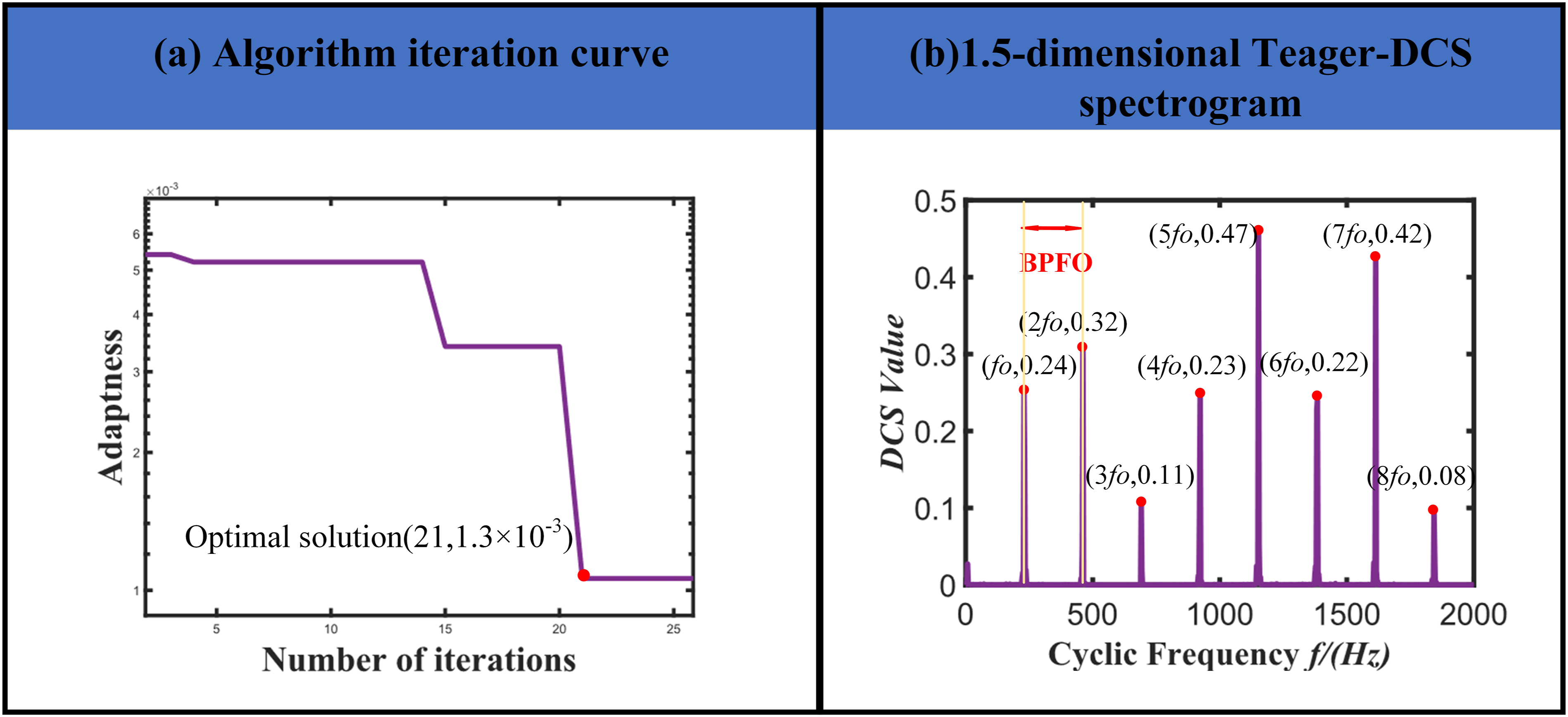
WFS under various experimental conditions are chosen for experiments to further prove its validity of the three-stage fault diagnosis method: test Case 1 experiment is 355 h, the initial 9000 sampling points at the 12,000th min of sampling time are taken, the experimental flow in Figure 9. Obtained experimental results of inner race. (c) Algorithm iteration curve. (d) 1.5-DTECS.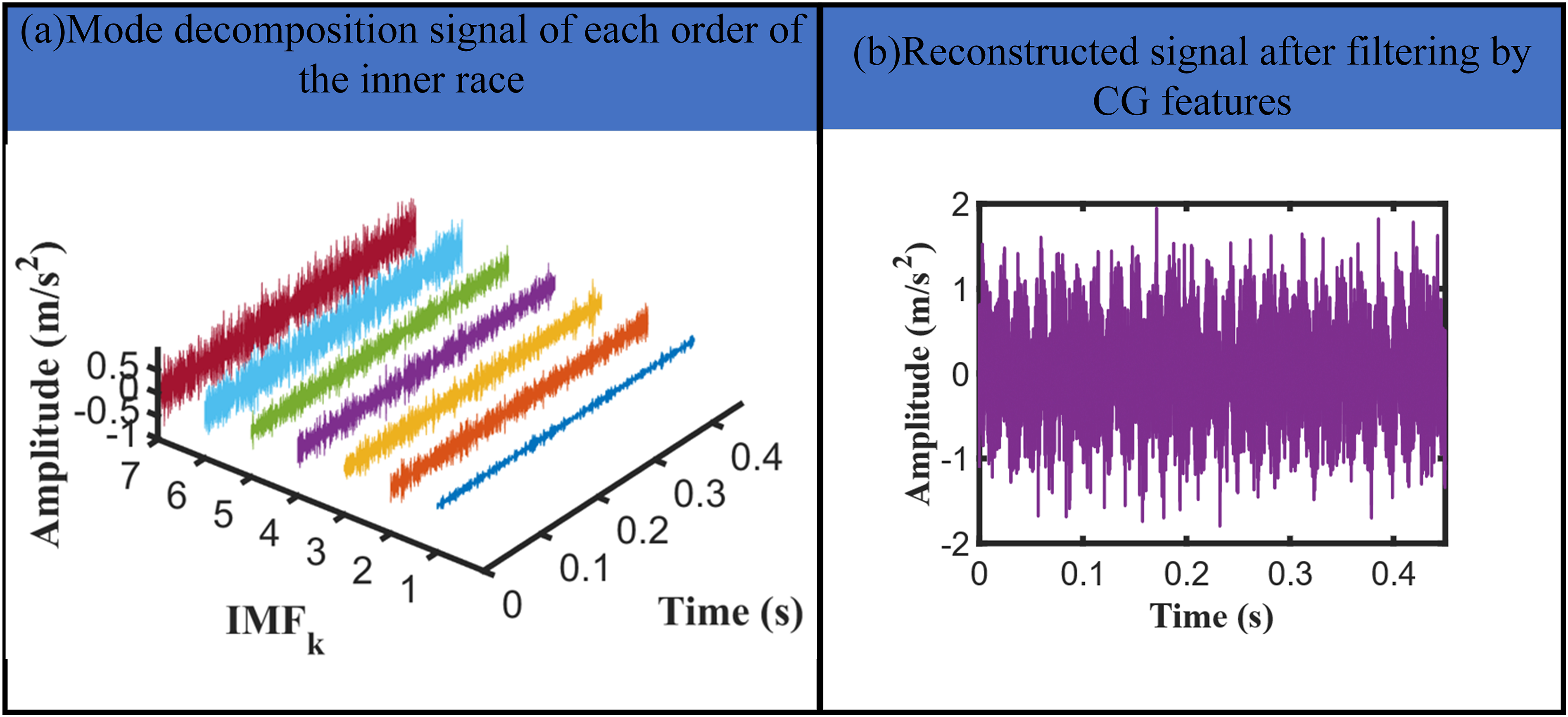
As stated in Table 2, BPFI is 230.4 Hz. According to equation (12), the initial period T of deconvolution of IMCKD is 86.8. The search range of T in IMCKD is set to [76, 96], the search range of L is set to [101, 500], and the search range of M is set to [1, 7]. Figures 9 and 10 depicts the inner race fault experiment utilizing the STFFE. According to equation (12), BPFR is 140 Hz, and the T of the deconvolution of IMCKD is 142. The seeking range of T in IMCKD is set to [132, 152], the seeking range of L is set to [101, 500], and the seeking range of M is set to [1, 7]. The experimental results of rolling element fault diagnosis with STFFE method in Figure 11. Obtained experimental results of inner race. (a) Algorithm iteration curve. (b) 1.5-DTECS. Obtained experimental results of rolling element. (a) Algorithm iteration curve. (b) 1.5-DTECS.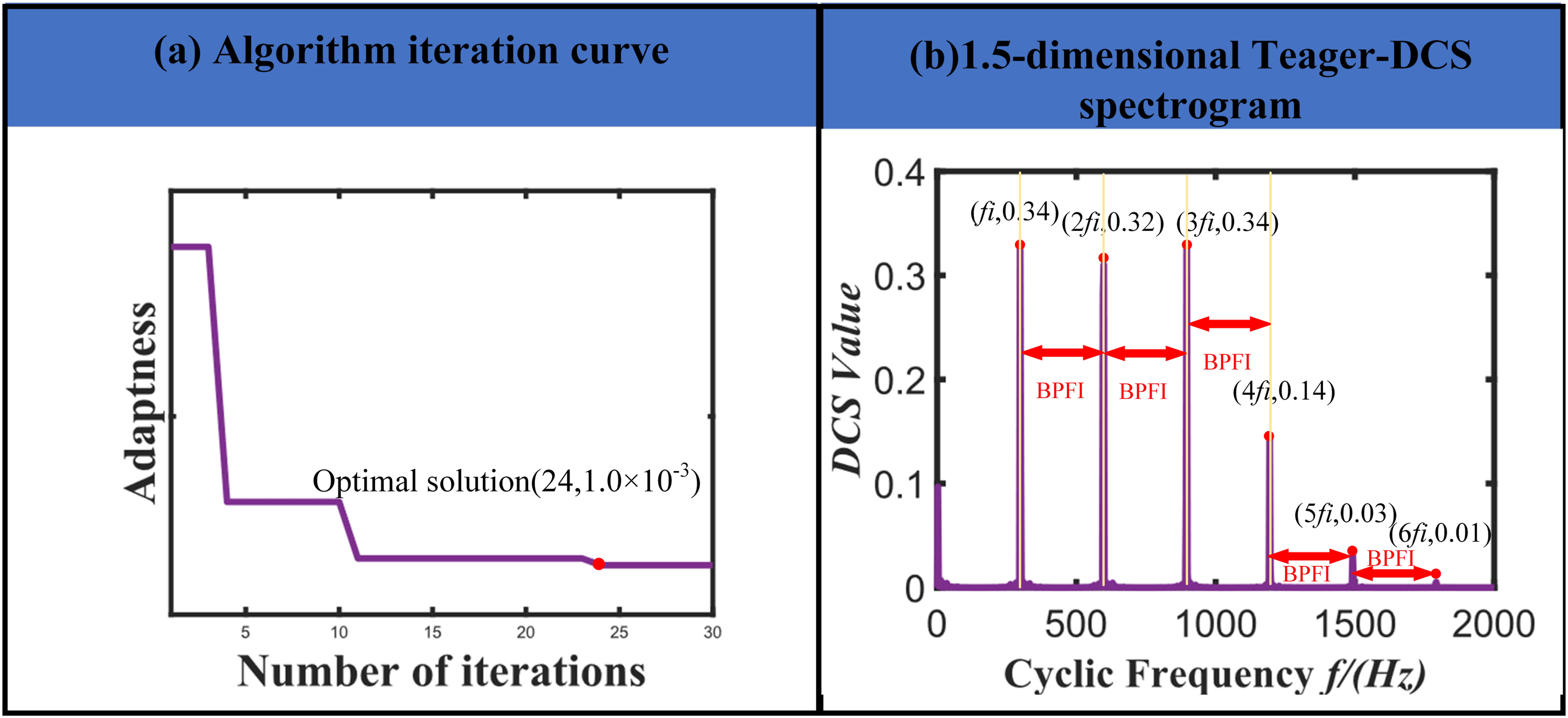
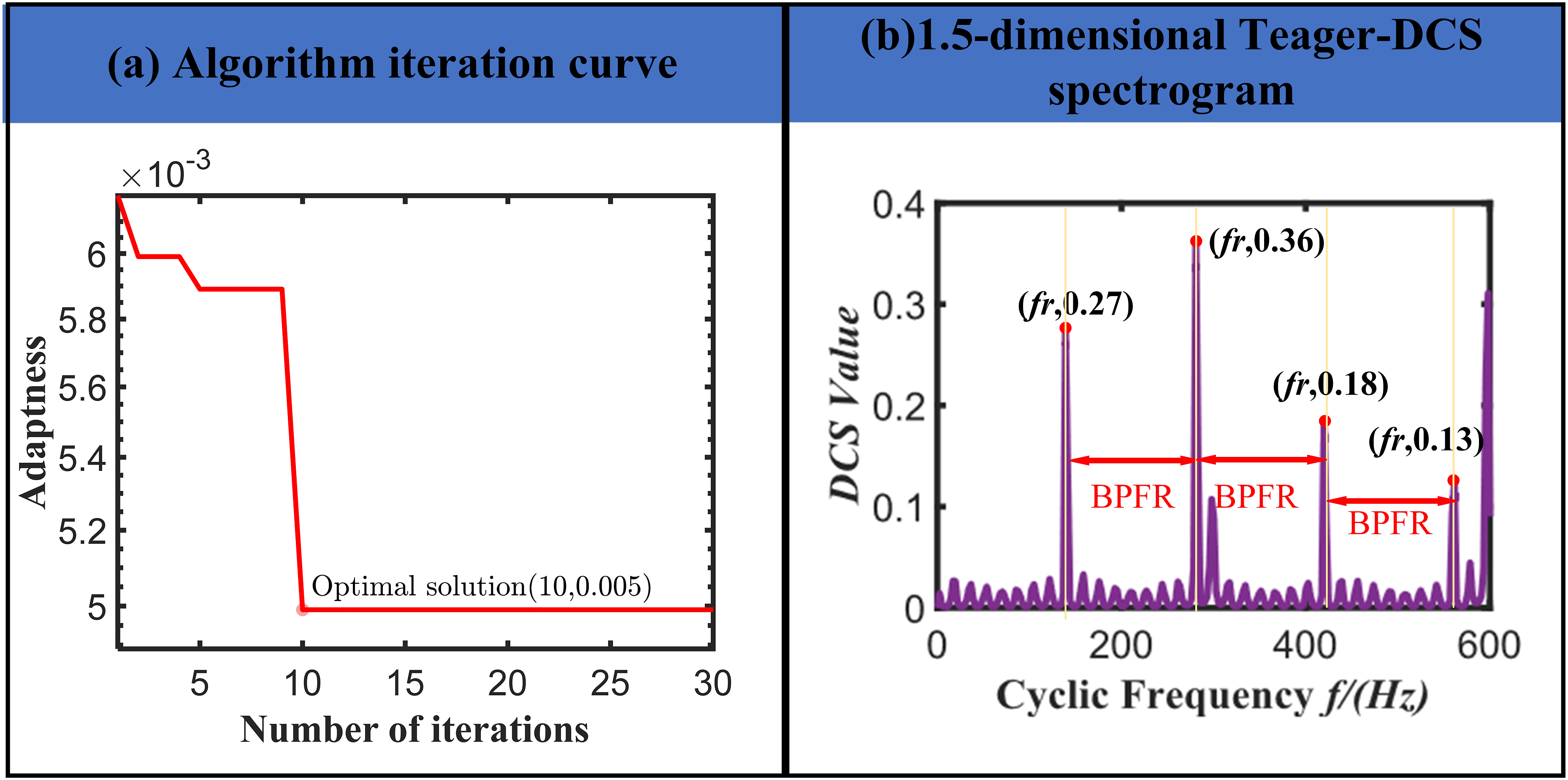
Figure 9(a) depicts the signal decomposition process by applying the ACMD method; the reconstructed signal using the CG maximization guidelines is shown in Figure 9(b); the curve of the fitness function of iterations is shown in Figure 10(a). It can be observed that the RSA algorithm converges at the 24th iteration. At this point, MCKD is able to take the best combination of [84, 230, 1], this means that the algorithm has obtained the optimal combination of parameters with T = 84, L = 230 and M = 1. Consequently, 1.5-DTECS after optimal IMCKD processing, illustrated Figure 10(b).
Result of the STFFE method.

Analysis of variation parameters
In order to verify the correctness with the results obtained by adaptive filtering of the RSA-optimized MCKD algorithm, the values of L and T in the optimal parameters of the MCKD algorithm are changed. For the outer race fault experiments, the filter length L is changed from 128 to 140 (changed within 10% according to the optimal search range) and T is changed from 65 to 72, that is, [L, T, M] is set to [72, 140, 3]. After MCKD analysis, 1.5-DTECS analysis was performed, the results in Figure 12(a). Similarly, for the inner race fault experiment, the filter length is changed from 230 to 210 and T is changed to 90, that is, [L, T, M] is set to [90, 210, 1]. After MCKD analysis, 1.5-DTECS analysis is performed and the results in Figure 12(b). Obtained comparison results of changing parameters. (a) 1.5-DTECS of outer race. (b) 1.5-DTECS of Inner race.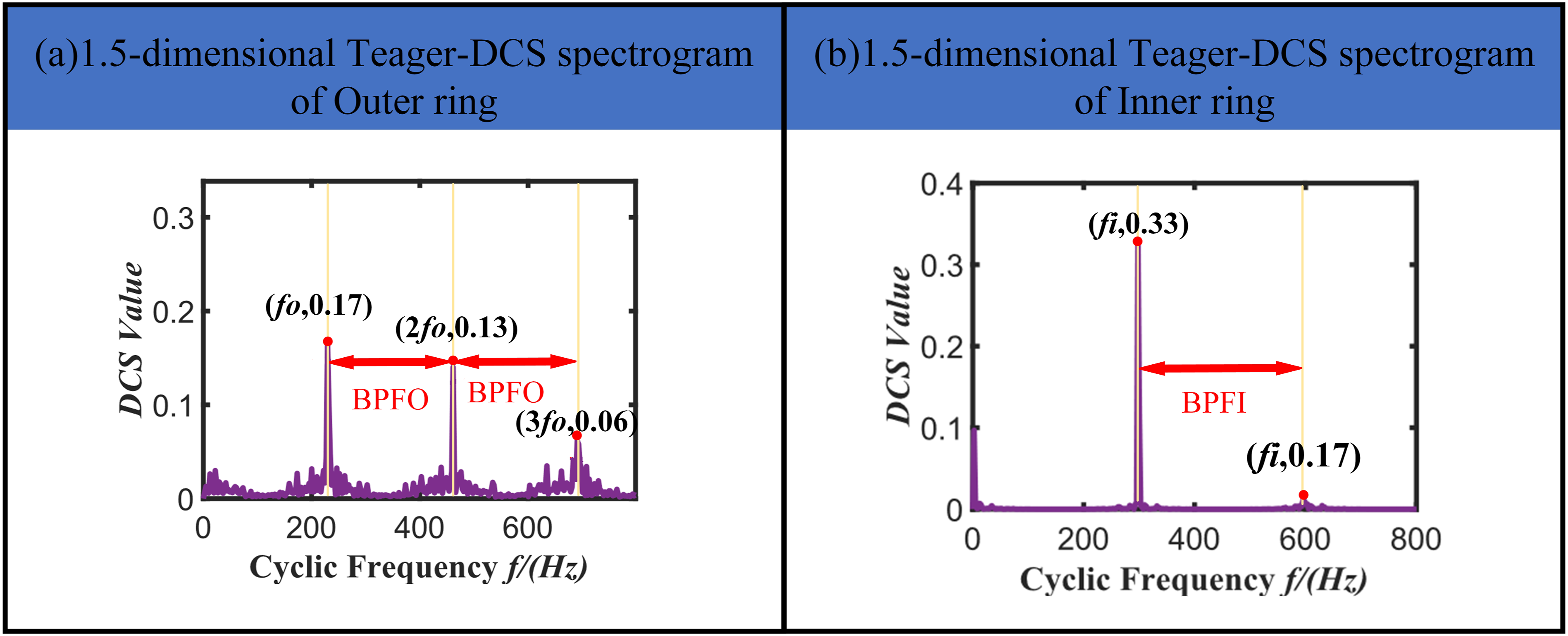
From the spectrum of Figure 12, it can be seen that BPFO and BPFI are presented. In comparison with Figures 8(b) and 10(b), the multiple frequencies of DCS values was not significant in the three-stage method with random parameter combinations. The comparative experimental demonstrate that the choice of parameters has a large impact on the results of proposed three-stage method.
Conclusion
Aiming to overcome the problems of weak fault signal and difficult FFE within strongly noisy and fuzzy transmission paths, a STFFE using ACMD and CG maximization guidelines, IMCKD and 1.5-DTECS is proposed.
In order to overcome excessive-decomposition problem of wideband fault signals, the CG index is combined with the chirp mode decomposition. The combined algorithm can effectively screen and fuse the meaningful signal components, suppress the noise components and highlight the transient impact. In addition, with the aid of RSA’s powerful global search capabilities and robustness, the RSA optimization algorithm is creatively applied to the adaptive parameter optimization of IMCKD. This improvement can enhance the impact components disturbed by noise, and avoid erroneous diagnosis results caused by the human choice of parameters. The finally obtained 1.5-DTECS can accurately extract multiple components under the condition of reducing external strong noise interference, which solves the problem that traditional methods are difficult to capture the high-order harmonics component of fault characteristics.
We demonstrated the ability of our proposed method by applying bearing datasets from the University of Cincinnati. The experimental results show that the three-stage fault detection method enables effective elimination of noise bands, highlights the fault impact, and realizes the extraction of weak fault features.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Zhejiang Provincial Natural Science Foundation of China under Grant No. LZ22E050001.