
Abstract
In recent years, the boom of the quadcopter industry resulted in a broad range of real-world applications which highlighted the urgent need to improve quadcopter control quality. Typically, external disturbances, such as wind, parameter uncertainties caused by payload variations, or the ground effect, can severely degrade the quadcopter’s altitude control performance. Meanwhile, widely used controllers like the proportional-integral-derivative control cannot guarantee control performance when the system is critically affected by factors that exhibit a high degree of variability with time. In this paper, an adaptive control algorithm is proposed to improve quadcopter altitude tracking performance in the presence of both the ground effect and a time-varying payload. First, we derive an adaptive altitude control algorithm using the sliding mode control technique to account for these uncertainties in the quadcopter dynamics model. Second, we apply Lyapunov theory to analyze the stability of the closed-loop system. Finally, we conduct several numerical simulations and experiments to validate the effectiveness of the proposed method.
1. Introduction
In recent years, unmanned aerial vehicles (UAVs) have become increasingly popular in many sectors, including military, surveillance, inspection, agriculture, and transportation (Alexis et al., 2009; Goodarzi et al., 2015; Elmokadem, 2019; Rodríguez-Mata et al., 2018). Quadcopters, one type of UAV, have been attracting a great deal of attention from scientists due to their numerous advantages such as economic efficiency, high maneuverability, and convenient maintenance. Most quadcopter applications require a reliable altitude tracking controller. However, the design of a stable and high-performance quadcopter tracking controller often faces several difficulties related to nonlinearities and coupled-control-input problems due to the system being underactuated (Hua et al., 2009; Zhang et al., 2014).
To address these issues, several control methods have been investigated. The backstepping approach has been introduced as an effective control scheme for underactuated systems (Das et al., 2009; Ramirez-Rodriguez et al., 2014; Xuan-Mung and Hong, 2019). Dong et al. (2014), Jia et al. (2017), and Zhang et al. (2018) presented various control methods to minimize trajectory tracking errors when external disturbances were introduced. Many advanced algorithms based on sliding mode control (SMC) techniques have been proposed to compensate for system model uncertainties (Besnard et al., 2012; Muñoz et al., 2017; Nguyen and Hong 2019). However, despite having certain advantages, the aforementioned model-based control methods either require considerable computational resources or complicated gain-tuning processes. In contrast, the proportional-integral-derivative (PID) control technique, used in many practical applications, is known to be a simple and efficient method to satisfy many control requirements.
To keep pace with the great advances in technology, quadcopter control techniques also must improve to meet the strict safety criteria of new applications in fields such as precision agriculture, cargo transportation, and fire-fighting. A common problem faced by all these applications is that a varying mass of the system will always lead to a degradation in altitude control performance and will inevitably expose the limitations in some PID controllers’ adaptiveness and robustness. An additional problem in the field of aerial vehicle control is the variation of system parameters, especially when fuel represents a significant portion of the total mass of the vehicle as is the case in rockets and satellites for instance (Cho et al., 2020; Gao and Wang, 2013; Rubio Hervas and Reyhanoglu, 2014). Furthermore, while the mass variation raises altitude control design issues, the ground effect is an additional problem that needs to be considered (Danjun et al., 2015; Sanchez-Cuevas et al., 2017). In general, the impact of the ground effect has often been neglected in altitude control. However, from a practical perspective, quadcopters are often used for flights close to low-altitude surfaces where the ground effect can considerably reduce the control performance. Therefore, finding a controller that can cope with both the variation in system parameters and the ground effect has become a pressing issue not only when it comes to quadcopter controls but also for other UAV systems.
To that end, various control approaches have been proposed in the literature employing different techniques. In a paper by Qiao et al. (2018), a gain-scheduled PID controller was applied to a quadcopter system to achieve a payload drop task. Simulation results were shown to demonstrate the effectiveness of this approach. This method has also been used in several other studies (Sadeghzadeh et al., 2014; Wei et al., 2014) as it inherited the simplicity from conventional PID controllers but was able to exhibit a certain capability to deal with system parameter changes. However, as the gains had been chosen from a predefined series, this method usually exhibits certain drawbacks when it comes to system stability analysis. Other approaches using neural networks were investigated by Lee et al. (2015) and Sierra and Santos (2019). Through numerical simulations, they were able to demonstrate that these intelligent control strategies could learn to adapt to changing conditions. However, their high computational cost excludes them from a wide range of applications that require small, low-cost UAV systems. An additional weakness of this neural network-based approach is that the systems’ stability is inherently difficult to evaluate. The linear parameter varying (LPV) control technique (Pham et al., 2019) is capable to overcome this disadvantage and has seen increasing use. However, LPV controllers are also known to require considerable computational resources. Other control approaches have been tested with regard to their ability to cope with variations in the vertical dynamics of quadcopters, including a switched adaptive control (Sankaranarayanan and Roy, 2018) and an adaptive prescribed performance control (Hua et al., 2018). However, the applicability of these approaches was never tested experimentally. Meanwhile, the SMC technique has become a popular choice in controlling systems that need to be robust against external disturbances and parameter uncertainties (Lee et al., 2009). In the study by Liu et al. (2019), a learning rate-based SMC was applied to a variable load quadcopter. While the authors successfully demonstrated the robustness of their algorithm through experiments, they did not consider (dynamically) the influence of the ground effect in low-altitude flights and did not present any demonstrations of such scenarios.
In this paper, we propose an adaptive sliding mode controller (ASMC) to achieve the goal of altitude tracking control in the presence of considerable system parameter variations and the ground effect. The main contributions of this study are fourfold: (i) To account for uncertainty, we introduce an unknown time-varying parameter to the quadcopter’s dynamic model that will be estimated by our adaptation law. Using the obtained dynamics model and Lyapunov theory, we design an adaptive sliding mode control law and mathematically prove its stability. To improve the system control performance, it is crucial to find a suitable adaptation law that provides reliable estimates of the uncertainties. (ii) Compared to conventional and commonly used PID controllers, our controller delivers a significantly improved performance with regard to both settling time and robustness against the varying terms. (iii) Unlike most existing studies on adaptive quadcopter altitude control (see above) that exclusively tested and verified their algorithms via numerical simulations, we conducted both simulations and experiments of actual flight conditions to demonstrate the effectiveness of our method. (iv) During the experiments, we utilized a water discharge system consisting of a plastic container (to serve as a water tank), a water pump, and an Arduino control board (to control the pump automatically). This approach was intended to add realism to our experiments and bring them closer to real-world applications, such as unmanned aerial firefighters, agricultural spraying drones, or urban air mobility.
The remainder of this paper is organized as follows. Section 2 presents the dynamics of the quadcopter with the ground effect taken into account. In Section 3, the sliding mode controller and adaptation law are derived, and the stability of the closed-loop system is proved using Lyapunov theory. The simulation and experimental results are discussed in Section 4 before ending with the conclusions in Section 5.
2. Quadcopter dynamics model and problem formulation
In this section, we briefly present the quadcopter dynamics model, which has already been investigated in several previous studies (Kim et al., 2009; Mahony et al., 2012; Xuan-Mung et al., 2020).
Let Configuration of the quadcopter.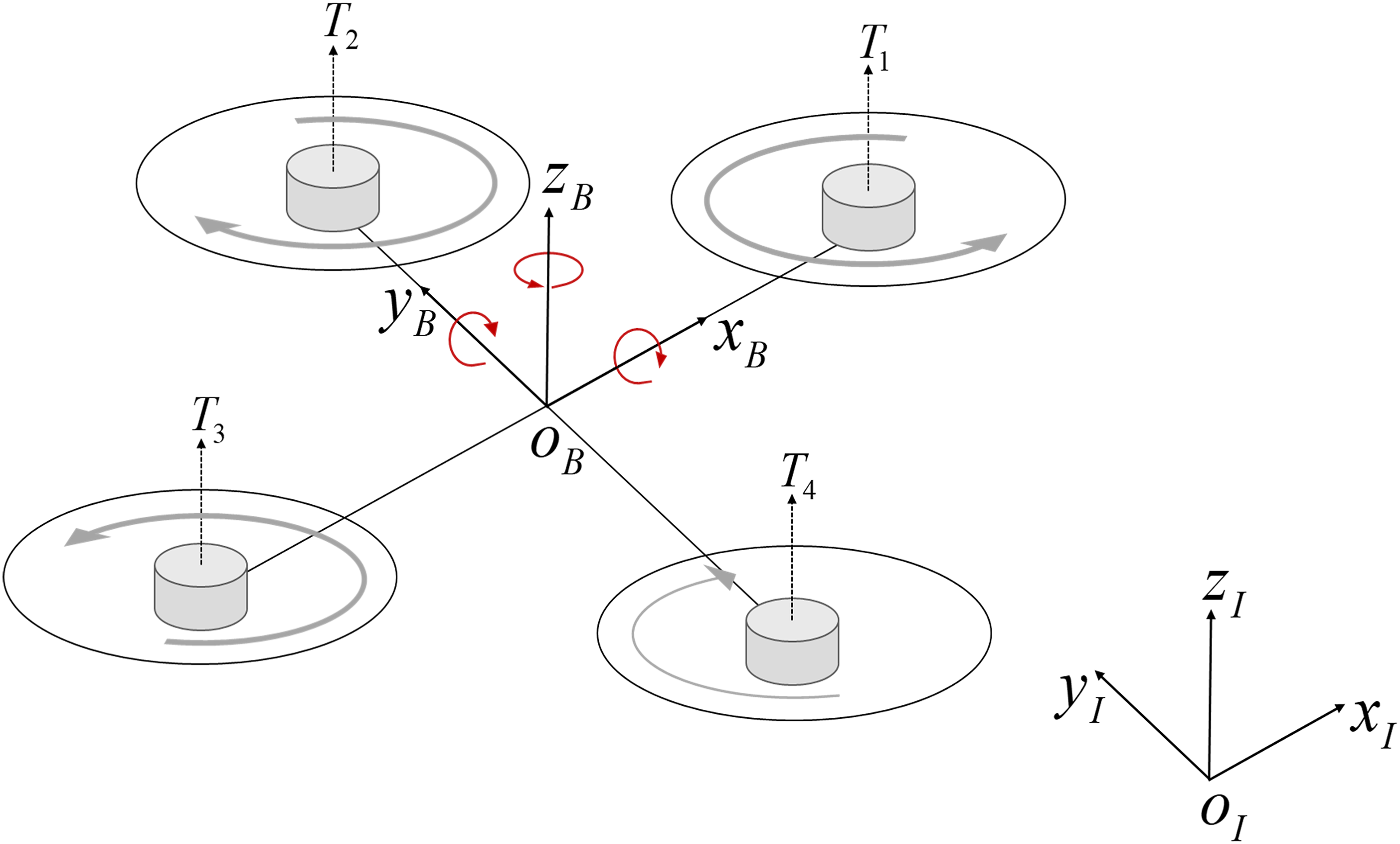
we take it into consideration in the vertical translational dynamics of the vehicle (Danjun et al., 2015). Then, the quadcopter dynamics model can be described as follows
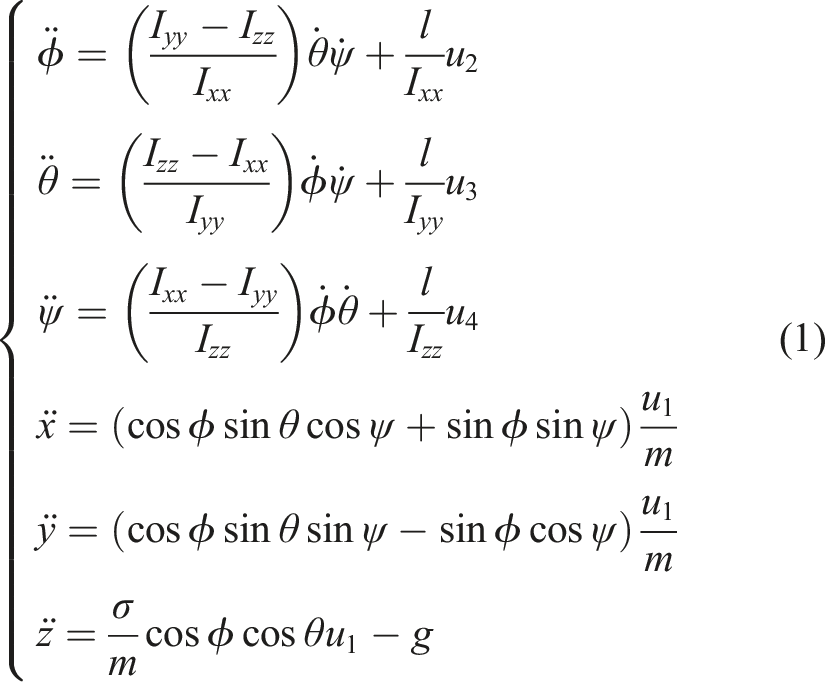

Since both

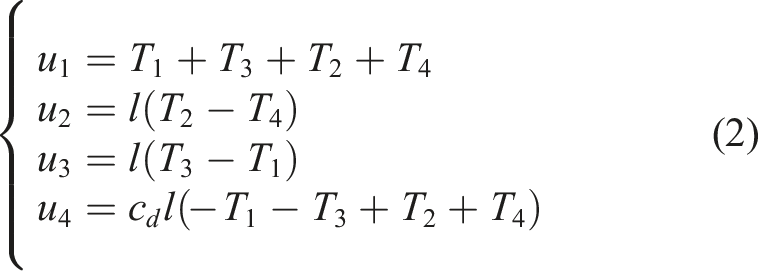
The last equation in (1) can be rewritten using the control input

Now, it is seen that both
3. Controller design
In this section, we present an adaptive altitude control algorithm for the quadcopter based on the SMC technique.
Let


Substituting (5) into the derivative of (7) yields

Let
For any given altitude setpoint, (i) The estimate of ς, that is, ς^, is updated as (ii) The control law is designed as


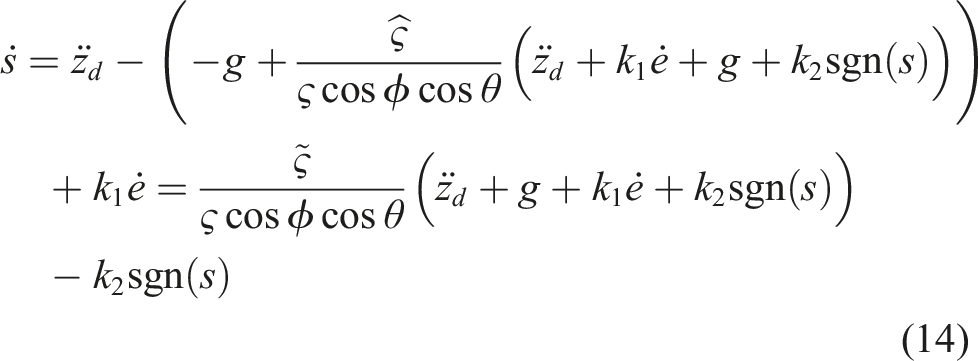
Let A Lyapunov function candidate, Here, it is worth noting that from a practical point of view, the system mass and ground effect are not fast-varying quantities. Hence, we assume that Substituting (10) into (8), the derivative of the sliding surface becomes From (9), (13), and (14), the time derivative of From (15), it is clear that the system is stable. This completes the proof.



In practical applications, to eliminate the chattering phenomenon of the proposed controller, the signum functions (sgn) in equations (9) and (10) can be replaced by hyperbolic tangent functions (tanh) (Hassan, 2002), where
The positive constant
The larger
4. Simulation, experimental results, and discussions
4.1. Experimental setup
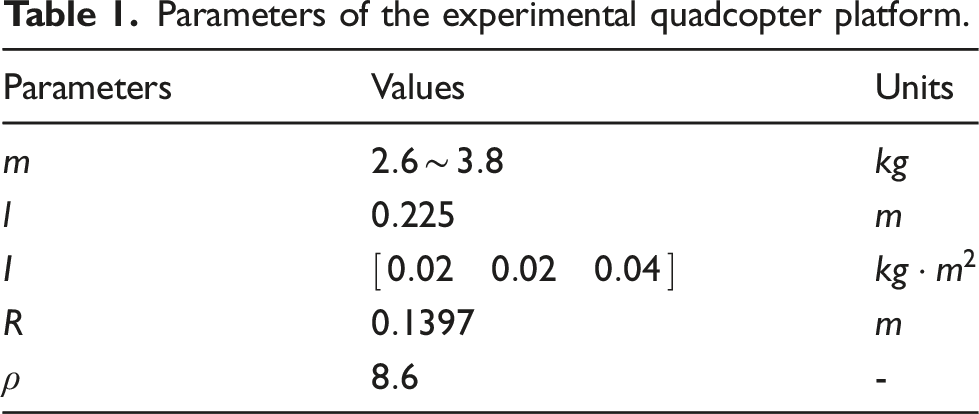
Parameters of the experimental quadcopter platform.
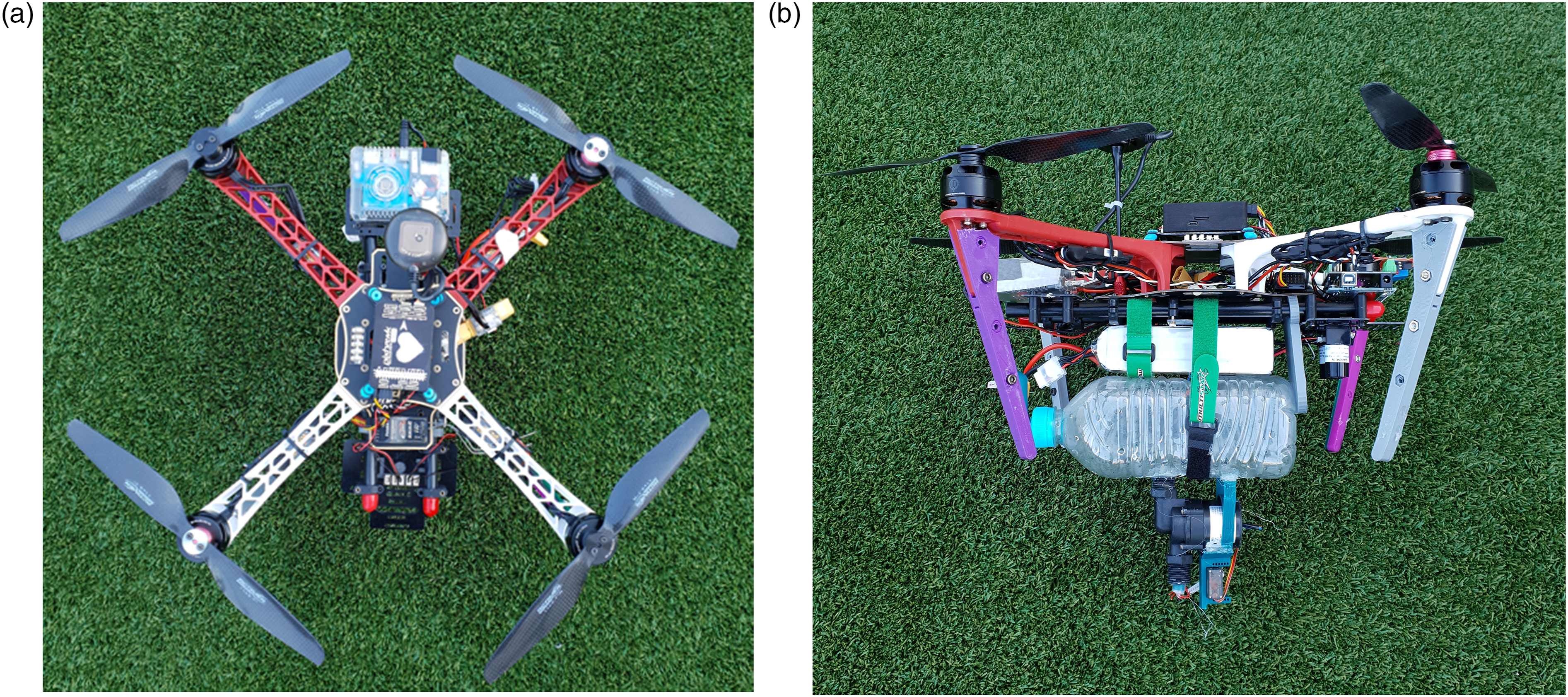
Top view (a) and side view (b) of the experimental quadcopter equipped with a mass-varying mechanism.

Scheme illustrating the communication between the avionics devices.
Our proposed ASMC was implemented in the Odroid computer as a high-level controller, while the Pixhawk FCU operates the vehicle’s stabilized controller.
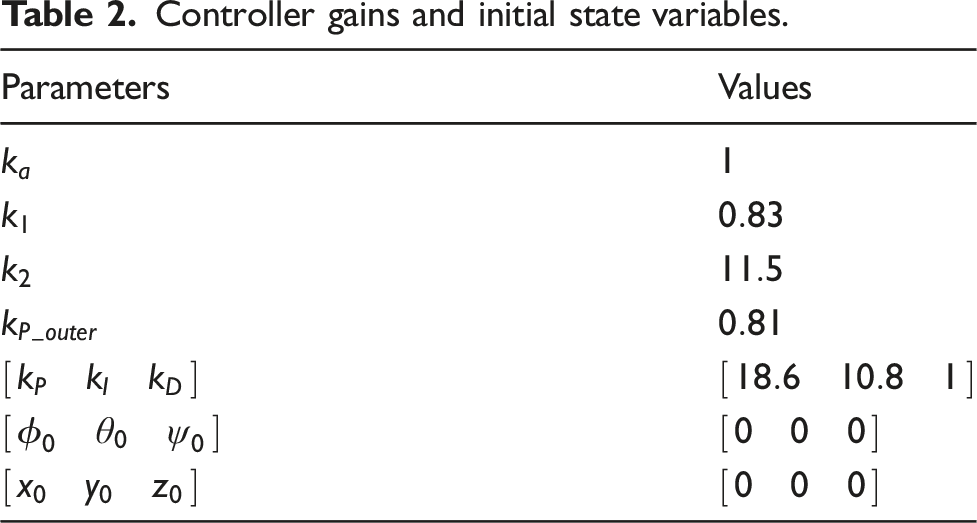
Controller gains and initial state variables.
4.2. Simulation results and discussions
To highlight the effectiveness of our controller, we compare its altitude control performance with that of a conventional PID controller that is widely applied in a number of UAVs. The quadcopter parameters were fed into the mathematical model used for the numerical simulations. The final values for the controller gains were determined from simulations applying a trial-and-error approach (Table 2). The PID controller gains were found using the root-locus method. Two scenarios were simulated to provide information about the impacts of mass variation and ground effect and to improve the control performance of our new approach. As the ground effect only comes into play when the vehicle is flying low, we chose an altitude setpoint <1.5 m for both scenarios.
4.2.1. Altitude tracking flight under mass variation and no ground effect
In this simulation scenario, we assumed no ground effect, that is, Performance comparisons for the scenario with the system mass variation only (no ground effect) between our controller (ASMC) and a conventional PID controller (PID). (a) Altitude tracking performance; (b) parameter 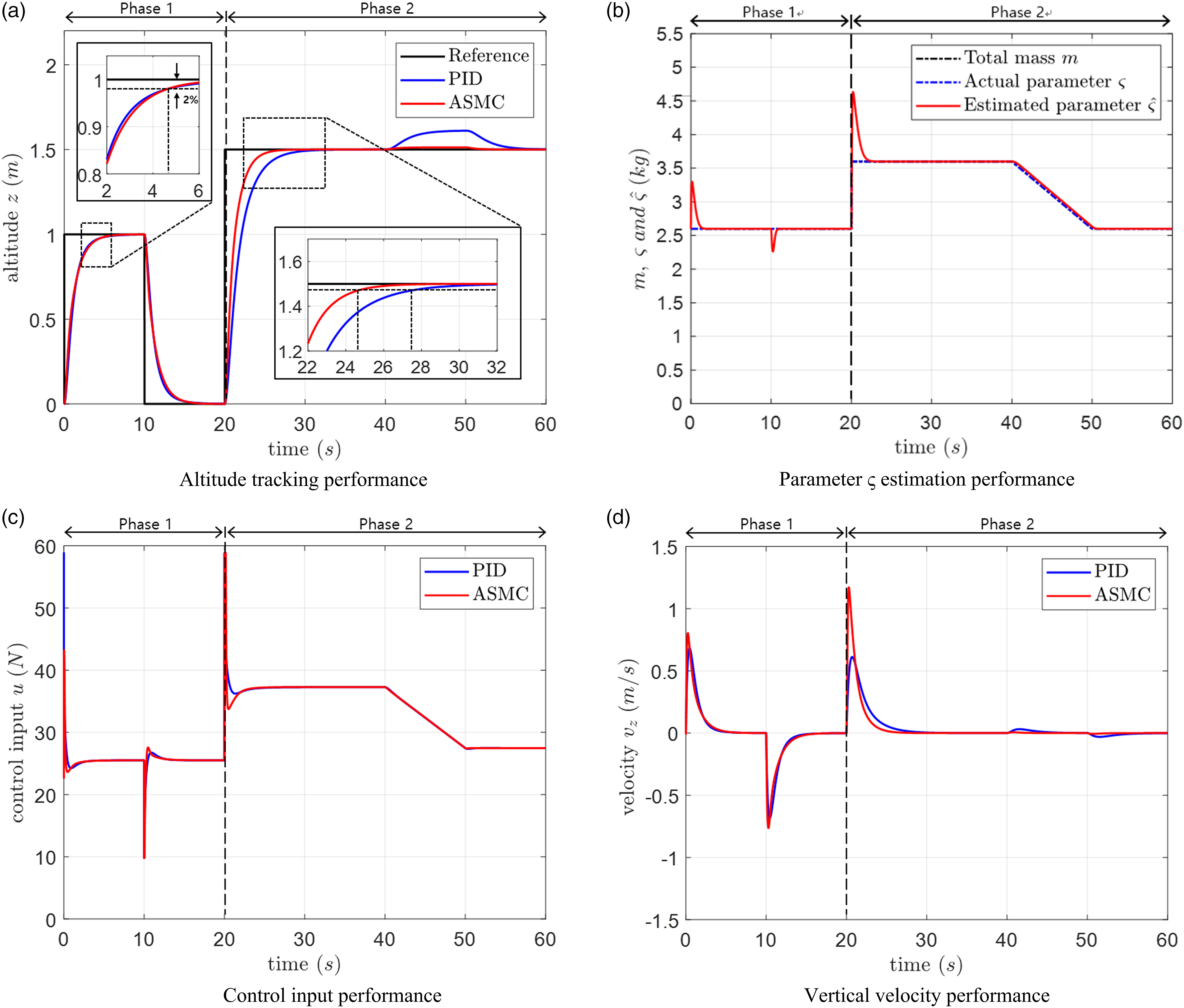
Phase 2 begins at t = 20 s with the command to ascend with its 1.2 kg payload to 1.5 m. Compared to Phase 1, the PID now lags behind our ASMC as it takes the PID controller 7.7 s to reach the altitude setpoint of 1.5 m while our ASMC only needs 4.8 s to complete the task. Furthermore, once we started to decrease the payload at t = 40 s, the altitude tracking performance of the PID controller deteriorates considerably as the vehicle significantly drifts away from the altitude setpoint. With the PID controller, it took the quadcopter about 17 s to return to the correct altitude, that is, at t = 57 s when the water had all been emptied and the payload was constant again. Meanwhile, with the proposed adaptation law our ASMC exhibits a very robust performance and keeps the desired altitude despite the system mass variation (Figure 4(b)). The control input (Figure 4(c)) and vertical velocity (Figure 4(d)) also demonstrate that the velocity performance of the new controller is superior throughout the duration of the simulation.
4.2.2. Altitude tracking flight under mass variation and ground effect
This simulation scenario focuses on providing observations of the system control performance in the presence of a varying system mass and the ground effect. We again split this simulation into two phases: (1) The vehicle takes off, climbs, and lands with the ground effect but without system mass variation, and (2) the vehicle takes off, climbs, and maintains an altitude of 0.5 m feeling the ground effect and also a mass variation (Figure 5(a)). It should be noted that the controller gains are the same as in the previous scenario. Performance comparisons between our new controller (ASMC) and a conventional PID controller (PID) with the ground effect only (0s < t < 30 s) and with both the ground effect and a varying system mass (t > 30 s). (a) Altitude tracking performance; (b) parameter 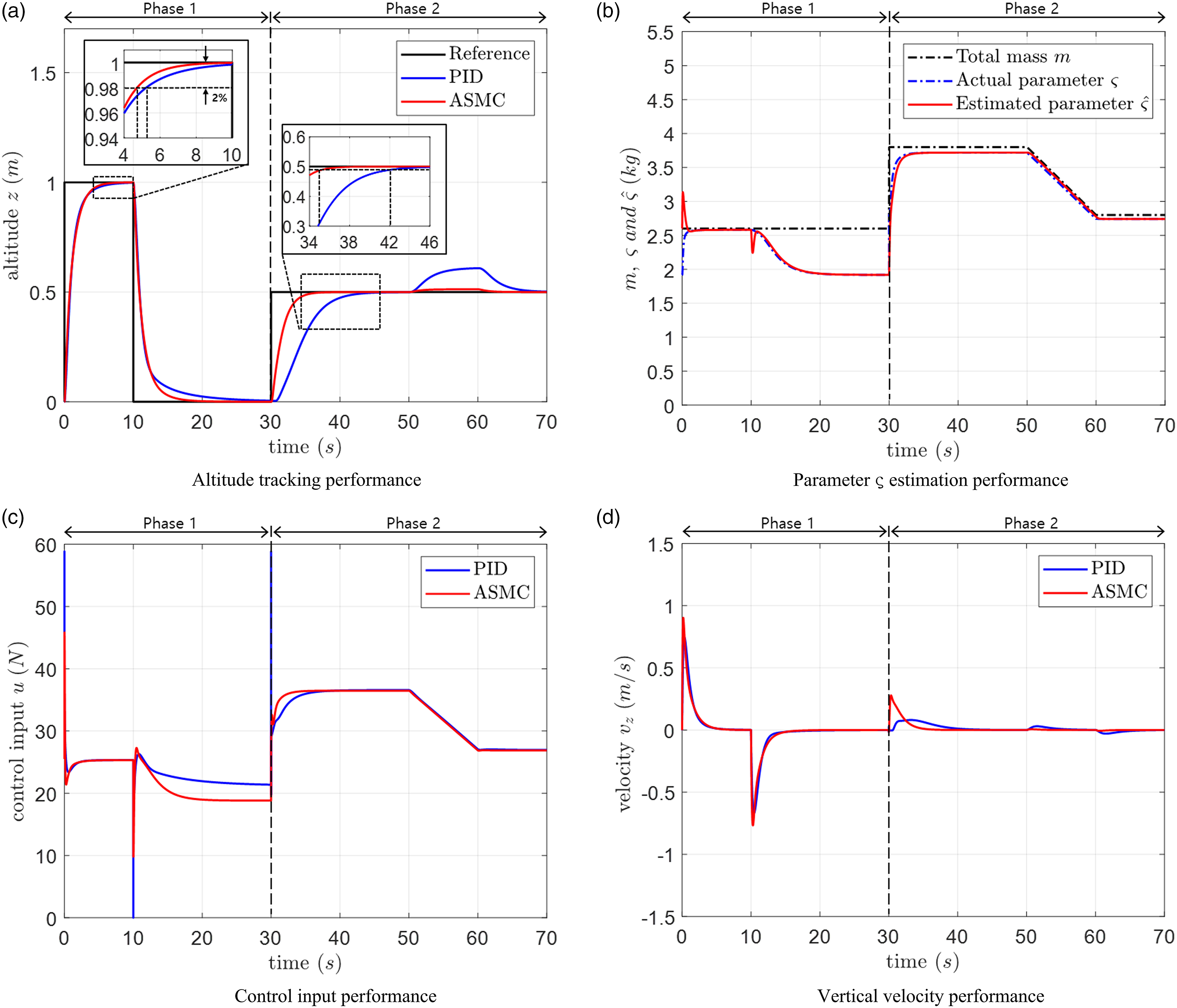
Phase 1 covers the time from
At the beginning of Phase 2 (
4.3. Experimental results and discussions
In this subsection, we present the experimental results. In order to verify the validity of the simulation results presented in the previous subsection, we also divided the experiment into two scenarios, namely Scenario 1, consisting of a landing task without mass variation, and Scenario 2, consisting of altitude tracking flights with mass variation. Videos of the experiment can be found at https://youtu.be/9p7oF7B6Hao.
4.3.1. Landing task without mass variation
In Scenario 1, the quadcopter (Figure 2(a)) takes off from the ground, climbs to an altitude of 1 m, and is supposed to maintain this altitude for a few seconds before landing (Figure 6). The responses of the two controllers are similar between Comparison of altitude tracking performance between our controller (ASMC) and a conventional PID controller (PID) in experimental Scenario 1.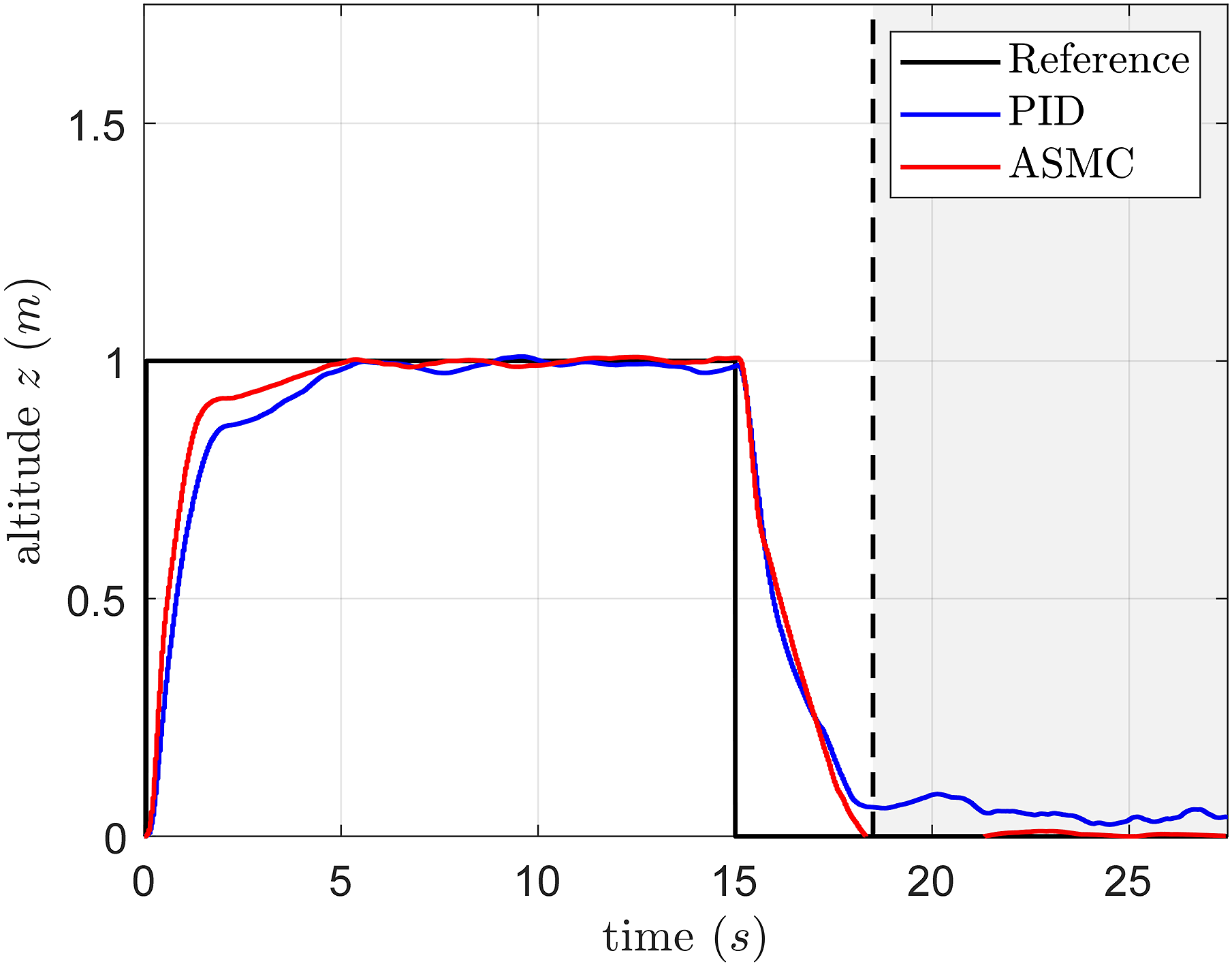
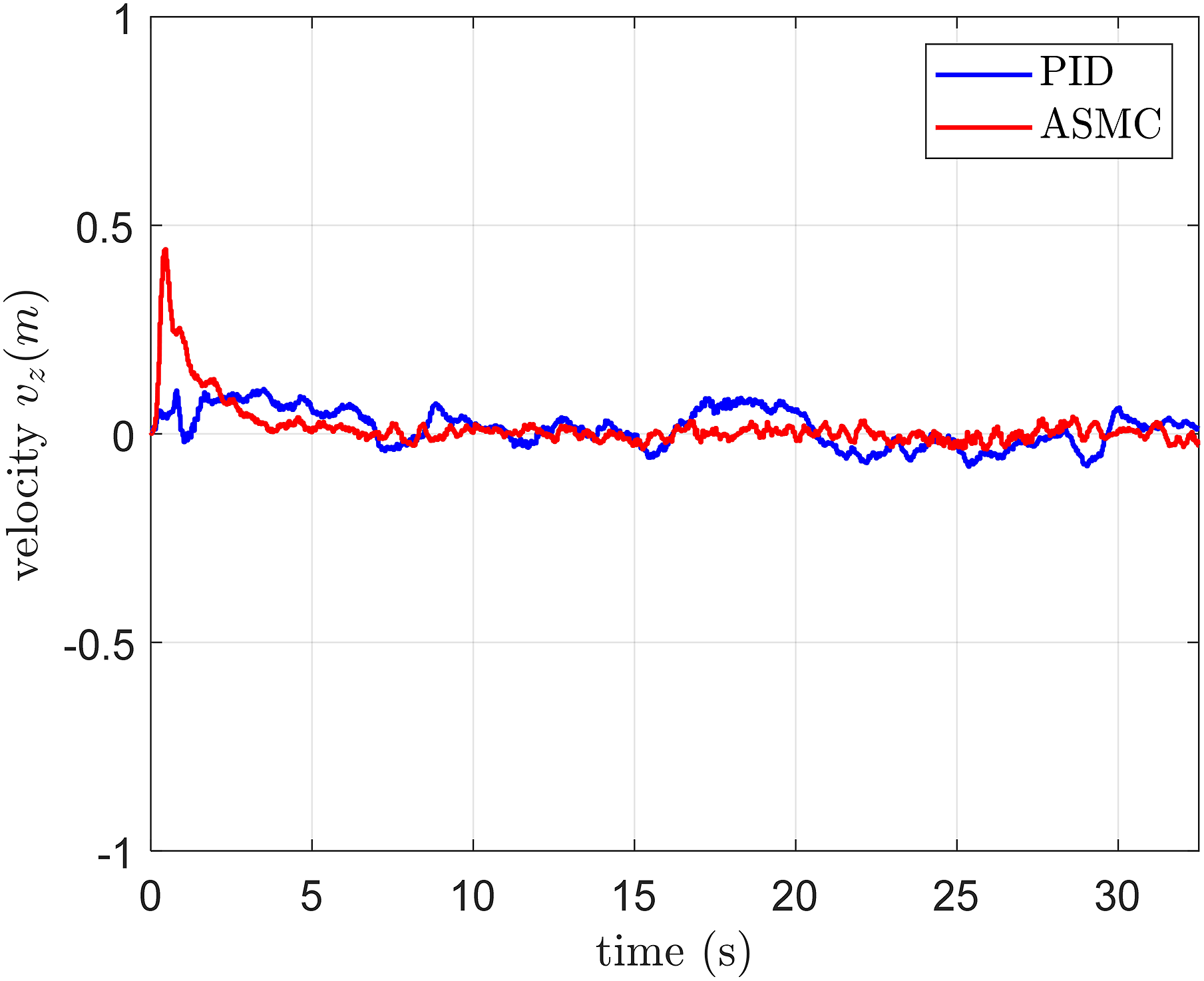
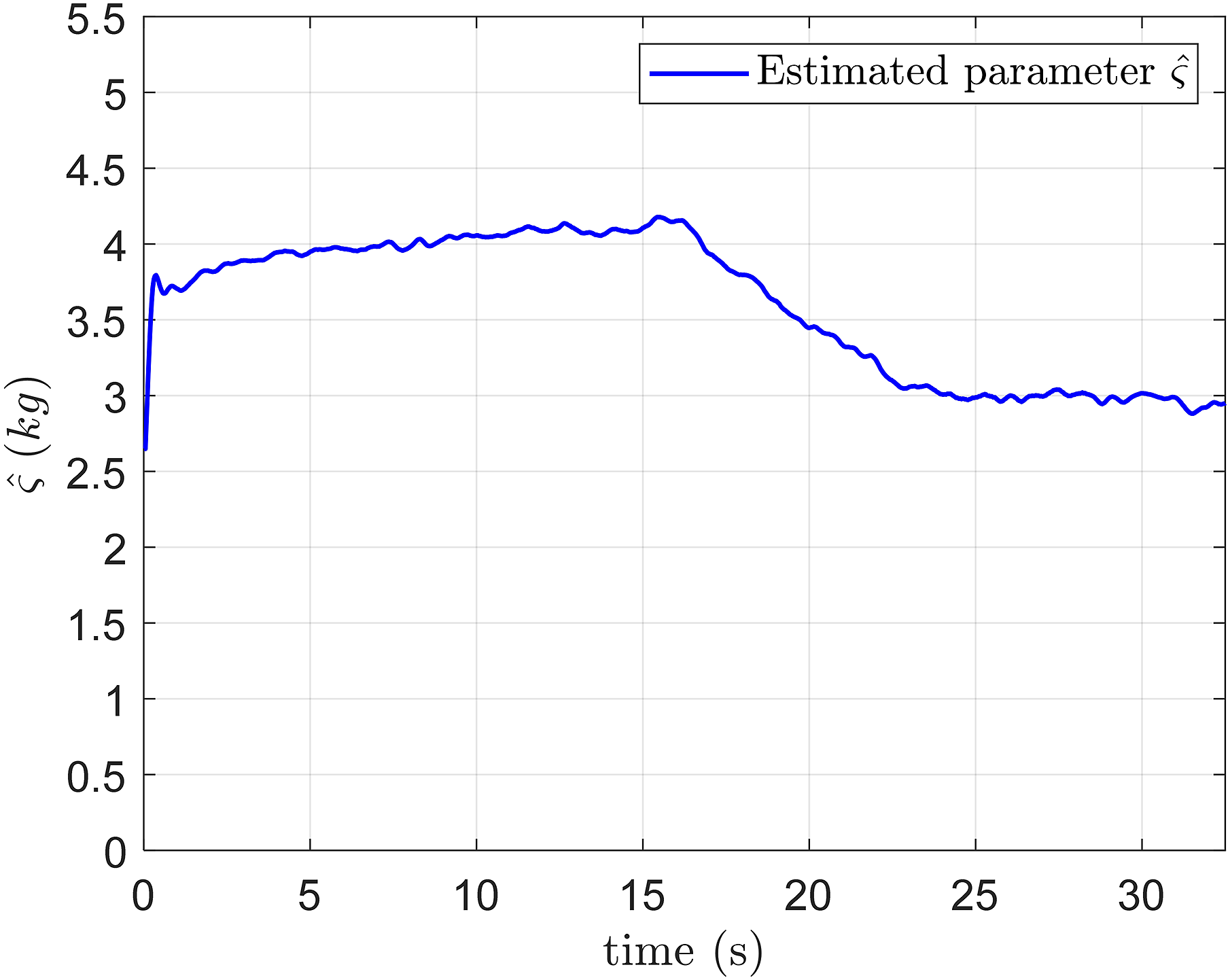
The control input (Figure 7) and vertical velocity performance (Figure 8) also demonstrate that our controller works well due to the adaptive law. The estimated parameter value Comparison of control input between our controller (ASMC) and a conventional PID controller (PID) in experimental Scenario 1. Comparison of vertical velocity performance between our controller (ASMC) and a conventional PID controller (PID) in experimental Scenario 1. Parameter 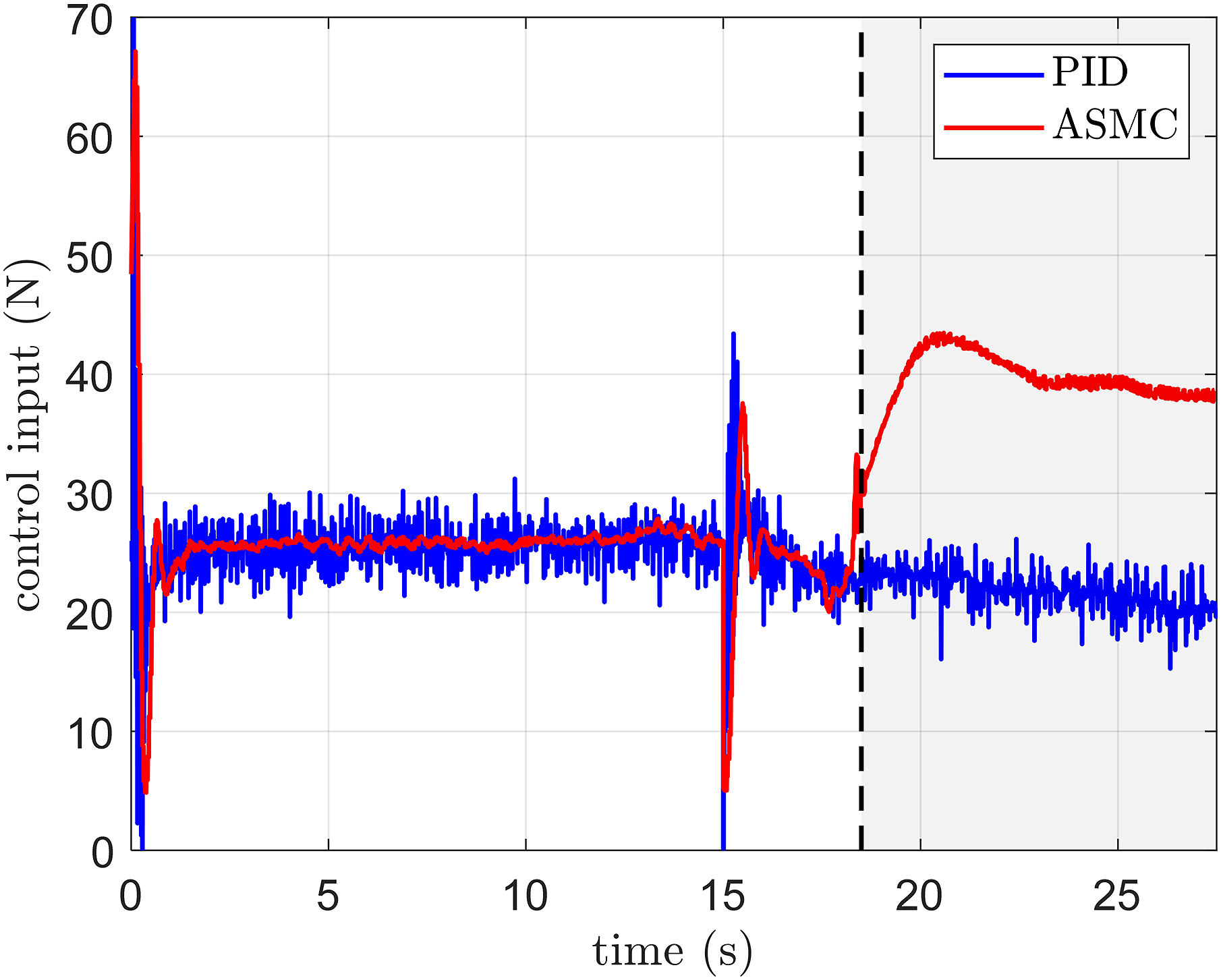
4.3.2. Altitude tracking flights with mass variation
In Scenario 2, the vehicle has to maintain a low altitude ( Comparison of altitude tracking performance between our controller (ASMC) and a conventional PID controller (PID) in experimental Scenario 2.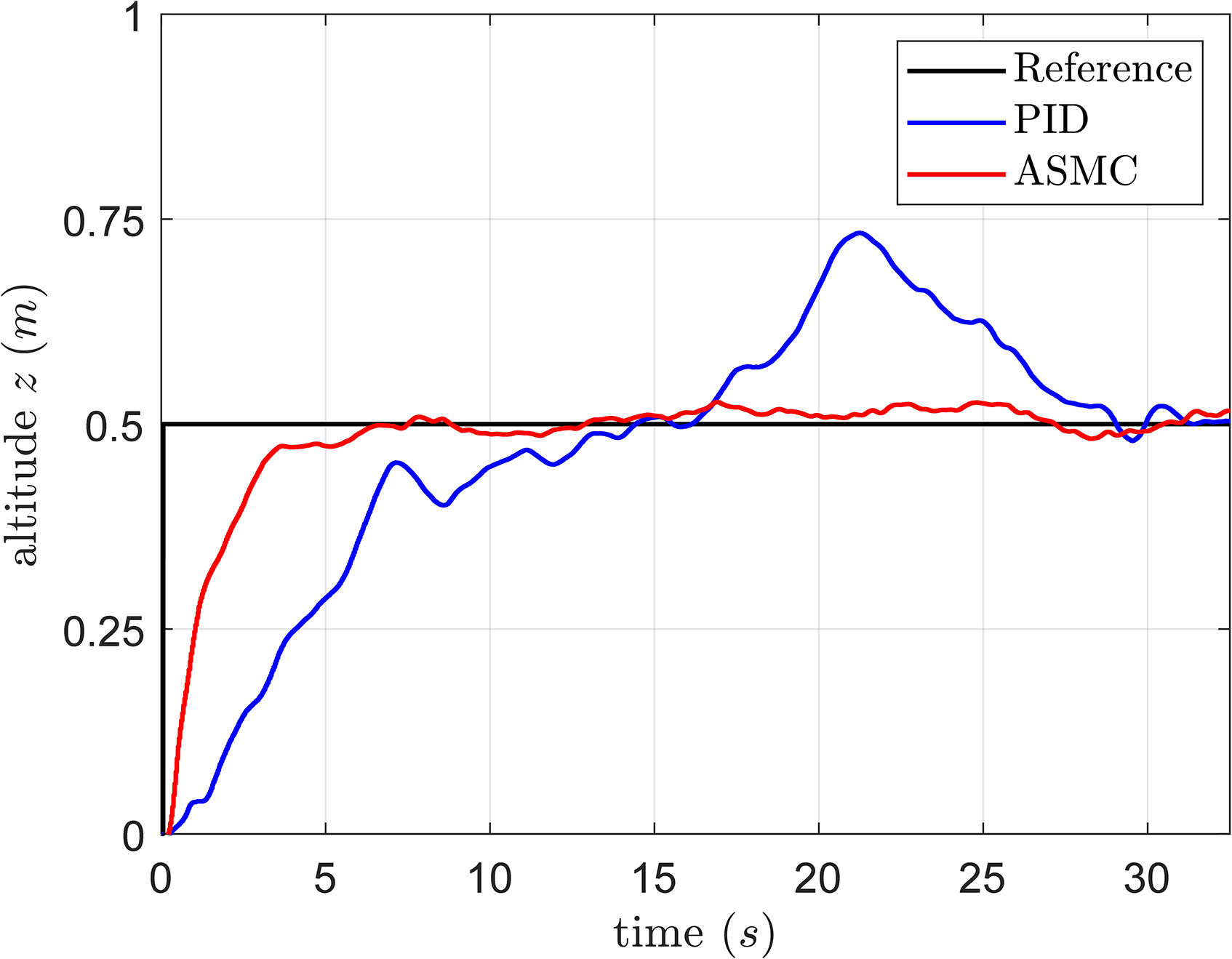
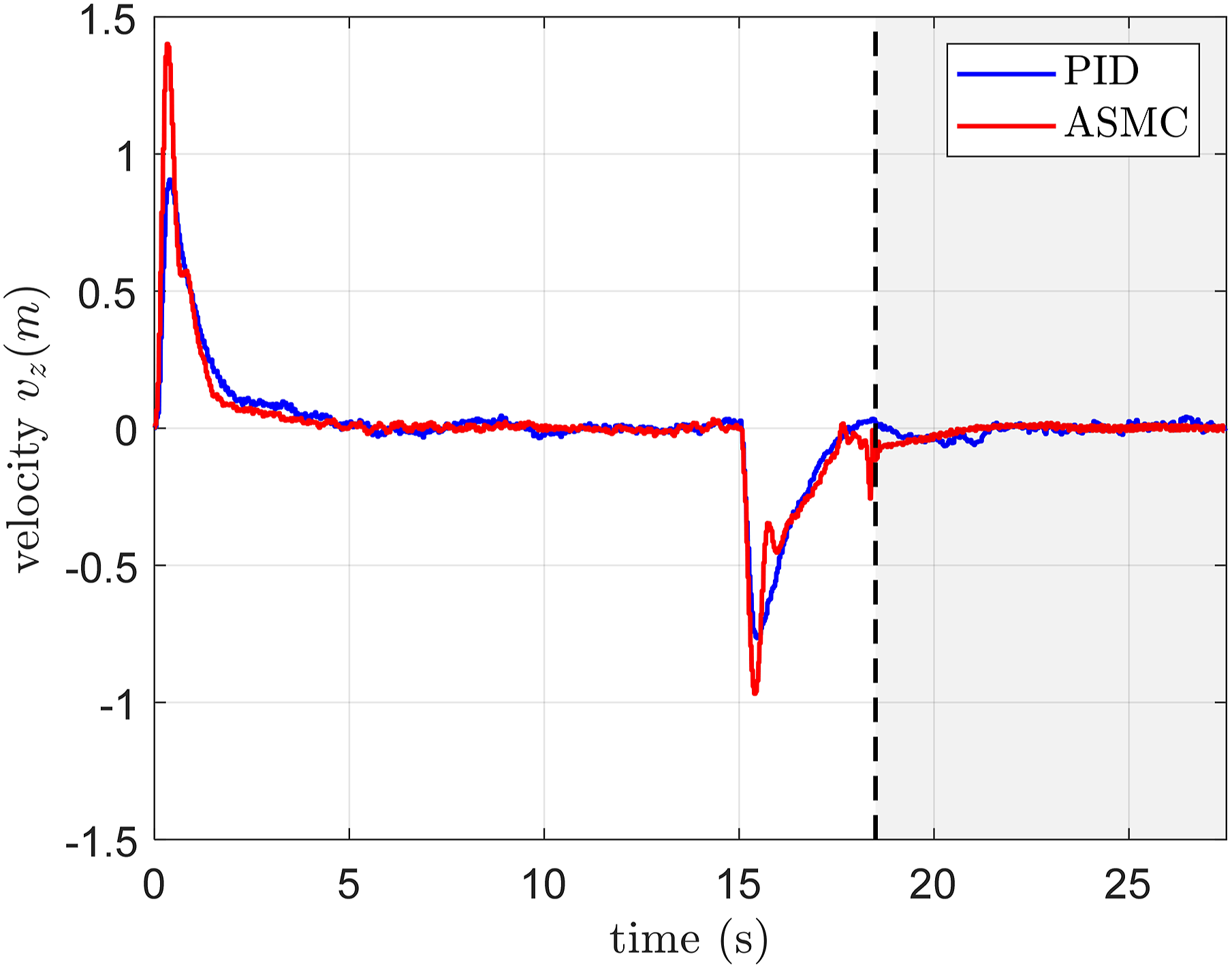
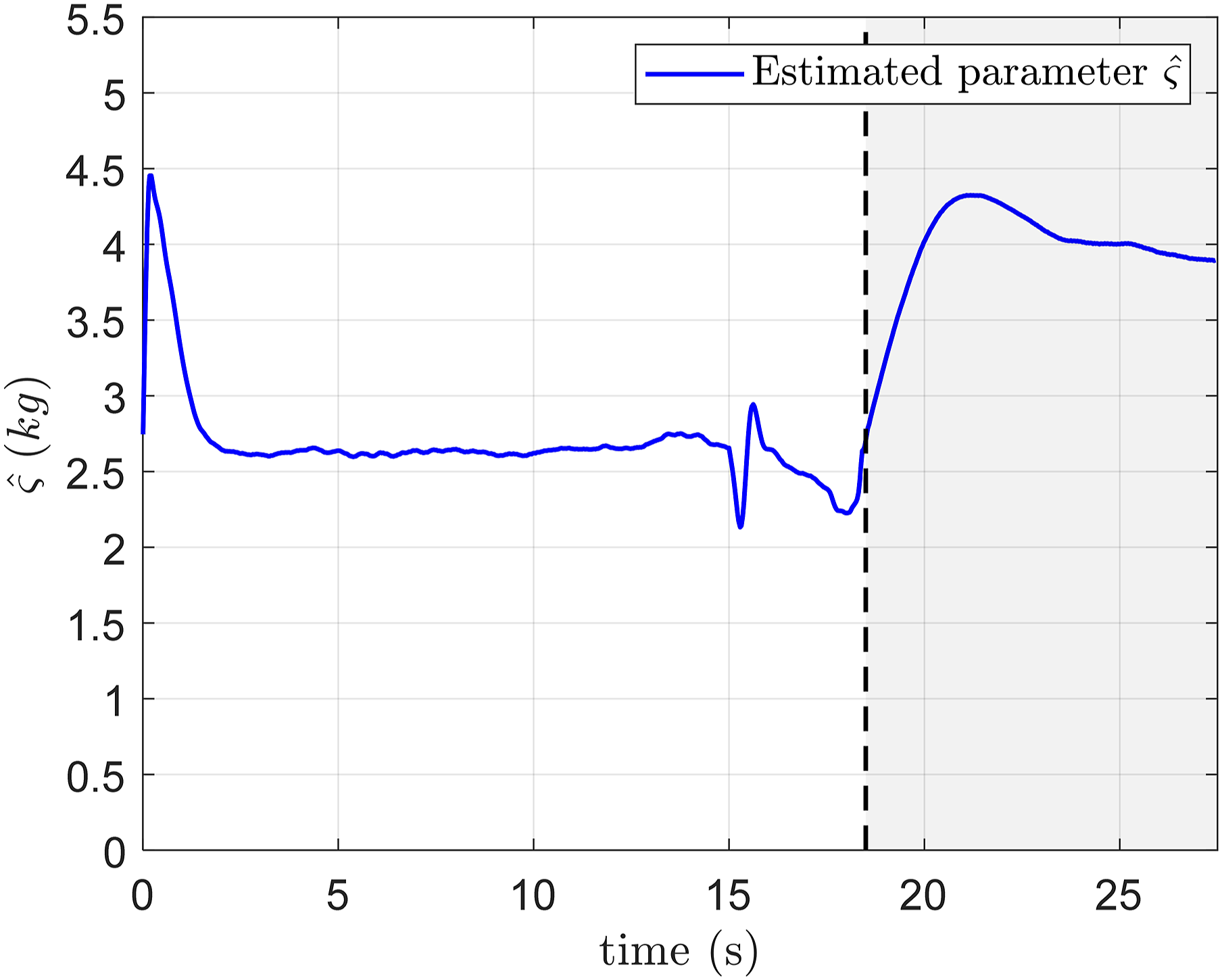
The control input (Figure 11) and vertical velocity performance (Figure 12) also demonstrate the superiority of our method for handling system mass variations. The estimated value Comparison of control input between our controller (ASMC) and a conventional PID controller (PID) in experimental Scenario 2. Comparison of vertical velocity between our controller (ASMC) and a conventional PID controller (PID) in experimental Scenario 2. Estimated uncertain parameter in experimental Scenario 2.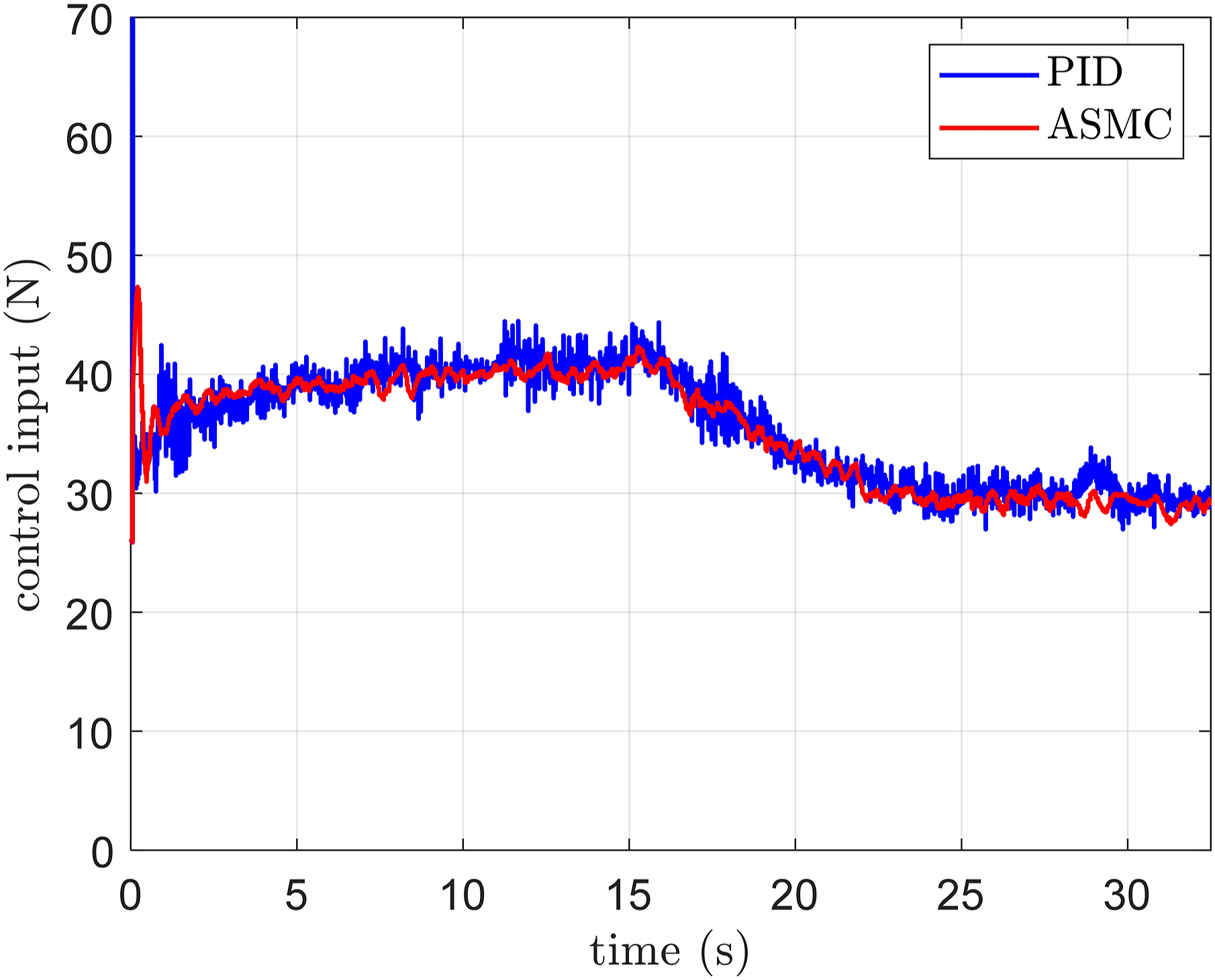
In summary, our proposed controller is capable of delivering superior altitude control performance even in the presence of strong system mass variations and the ground effect. It clearly outperformed the conventional PID controller which hold much promise for a wide range of future quadcopter applications, especially given the relatively straightforward design procedure of the new controller.
5. Conclusions
This paper presented an adaptive control algorithm for the quadcopter altitude tracking control problem in the presence of both ground effect and varying payload. We derived the controller using the sliding mode control technique and Lyapunov stability theory, and were able to strictly prove its validity. Results from both the simulations and experiments involving several scenarios clearly demonstrated the effectiveness of our controller. The merit of this work is scalable as it can be applied to several real-world quadcopter applications that are operated under system mass variation at low altitudes and require a high-performance controller, for example, precision docking, auto-charging systems, auto-delivery services, agricultural, and/or fire-fighting quadcopters. Finally, the validity of the proposed algorithms was verified by experimentally demonstrating its improved altitude tracking performance. In the future, we will work on the application of this approach to an agricultural spraying quadcopter system.
Uncited references
Footnotes
Acknowledgments
This research was supported by the MSIT (Ministry of Science and ICT), Korea, under the ITRC (Information Technology Research Center) support program (IITP-2021-2018-0-01423) supervised by the IITP (Institute for Information & Communications Technology Planning & Evaluation).
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Education (2020R1A6A1A03038540).