
Abstract
The deployment of autonomous vehicles will demand consistent and agreed-upon behavior in the form of standard driving rules for maneuvers (e.g., lane changes) as well as defined responses to specific road situations such as giving way to emergency vehicles and when crashes are unavoidable. This paper provides an approach to the implementation of ethical considerations for highly automated vehicles and autonomous vehicles by suggesting standard driving rules and a framework for the generation and evaluation of these rules. This framework is generic and can instantiate any set of ethical concepts (e.g., Western or Eastern schools of ethics) and cultural norms (e.g., European, Latin American, Asian) and be applied to other technological domains such as robot ethics and AI ethics.
Fully autonomous vehicle technology is tested in selected US locations (e.g., San Francisco, Phoenix, Austin) and in several Chinese cities. One of the major challenges in the design of these autonomous vehicles is their conduct while interacting with other vehicles and vulnerable road users such as pedestrians, cyclists, scooterists, and others (German Federal Ministry of Transport and Digital Infrastructure, 2017). Conduct, in this context, is composed of five elements: (1) the purpose/intention of the decision-maker, (2) the decision maker’s decision to act, the (3) ensuing action and resulting behavior, (4) the immediate outcomes, and (5) the overall consequences to others over time. Ethical concerns impact the decision making (2) and action selection (3). Namely, what to do and just as importantly, how to do it. “What to do” involves deciding whether to make a lane change to pass another car or not. “How to do it” concerns the criteria for making the maneuver (what size slot in the desired lane is needed for a safe transition). These two decisions are motivated by effectiveness (e.g., reaching the destination) and efficiency (e.g., how fast) but are constrained by ethical considerations that include demeanor, fairness and the accommodation of others.
In this paper we present a set of ethical maxims and driving rules and a framework for their development based on the recently published ISO standard for ethical considerations of AVs (ISO, 2023).
Road and Maneuver Sequences
The rules and maxims discussed in this paper are considered in the context of a formal description of their implementation. The description focuses on two aspects: (a) the road space and (b) vehicle maneuvers:
The road space is defined as any area that vehicles can potentially occupy. Our formal approach partitions the road space into a series of zones, such as highway lanes, traffic circles, intersections, etc. and entries/exits (Heymann & Degani, 2019) each of which has different characteristics and requirements for behavior. Each zone can be partitioned into slots that one vehicle can occupy at a time.
The road space in Figure 1 consists of three lanes and their respective slots. Let’s assume that the vehicles are moving at a speed of 80 km/hr. Vehicles that want to transition from one slot to another in their legal zone (e.g., accelerate) or in other lane (e.g., change lanes), need to make sure that this transition will be effective and efficient, well-coordinated with other road users, and most importantly, safe.
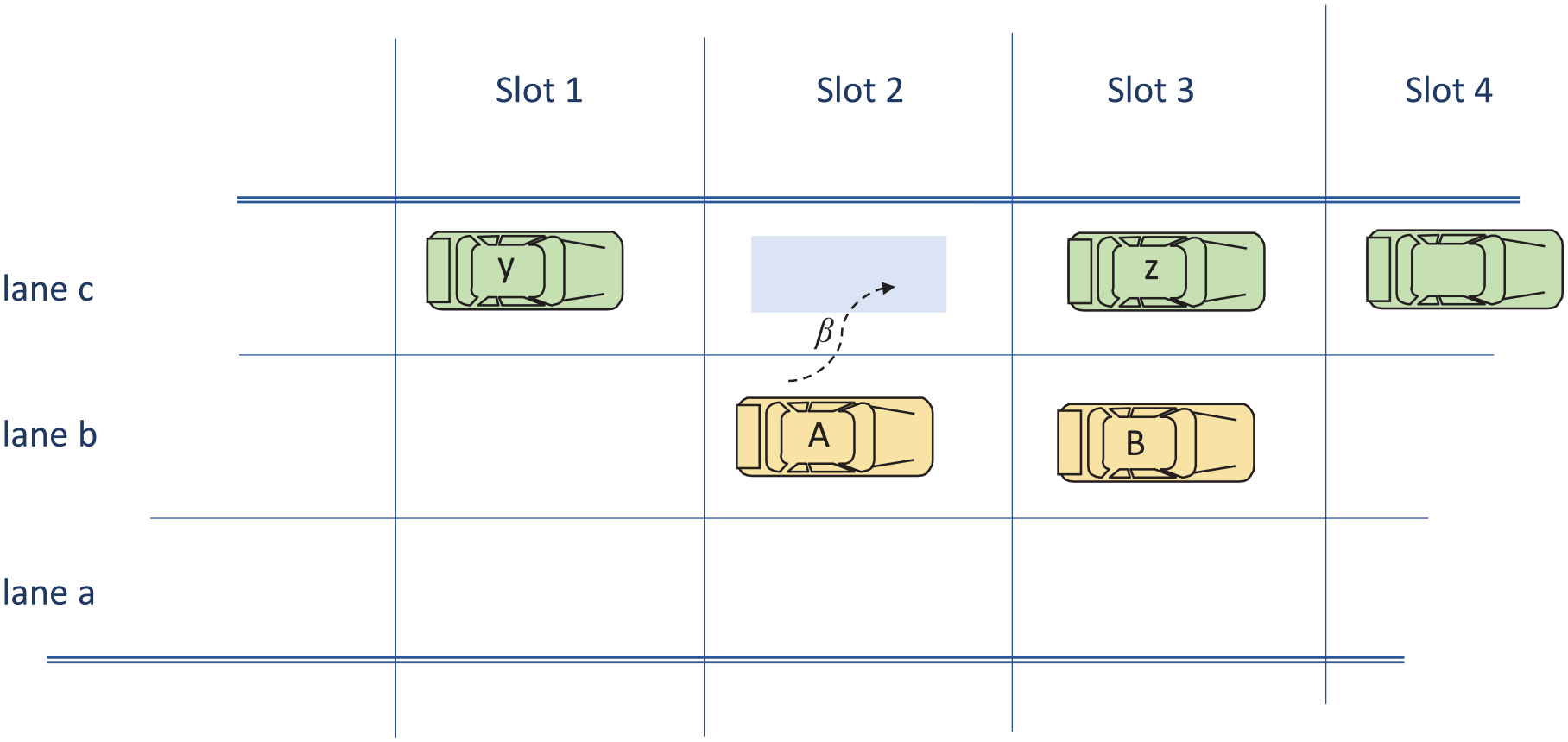
Lane change maneuver.
Vehicles maneuvers on the road space can be formalized as a series of steps from one slot to another consisting of the following action sequence: (1) “staking a claim” on a slot, (2) receiving an “acknowledgement” for the claim, (3) “affirmations” from all involved, and a final authorization, (4) “transition” into the slot (with a certain timeout limit), and (5) the physical “occupation” of the slot.
For example, vehicle (
In addition, the move demands a more complex curved maneuver with forward and lateral acceleration which, if not executed properly, could negatively impact the vehicles in lane B and lane C. The authorization mechanism thus places a higher “cost” on this lane change given the overall consequences to other road users.
Framework
This framework combines (1) a structured hierarchy of abstract concepts and concrete observations, (2) a method to translate these concepts and observations into rules, and (3) a method for their evaluation
Structured Hierarchy
Rules don’t grow on trees, nor do they fall from the sky. They must be encapsulated in some kind of structure. We implement a structured hierarchy that has top-down and a bottom-up elements. The top-down hierarchy starts with ideals (long term goals), purpose statements (what is desired and how to achieve it), ethical values (the United Nation’s declaration of universal values), and principles (e.g., bioethics principles of non-maleficence, beneficence, autonomy of decision making and action, and justice).
This top-down view is then complemented by the bottom-up insertion of general observations, called “precepts”, which capture how vehicles and entities should behave in the public space. From there, a set of maxims are defined to express how situations are best resolved by vehicles and other road users to achieve effectiveness/efficiency and safety. The general maxims for each road situation are then used to derive specific driving rules. This hierarchy ensures that driving rules will correspond to all the hierarchical elements, be internally coherent with other driving rules, and easily inspectable.
Figure 2 presents the structure of all the components in the hierarchy. It consists of four basic components that form the top-bottom approach—ideals, purpose, values, and principles. These include precepts to guide conduct, maxims, and the driving rules themselves. They can also guide vehicles in ambiguous situations when no specific driving rules exist. In these undefined situations, the vehicle is expected to apply precepts, principles, and values to take appropriate action.
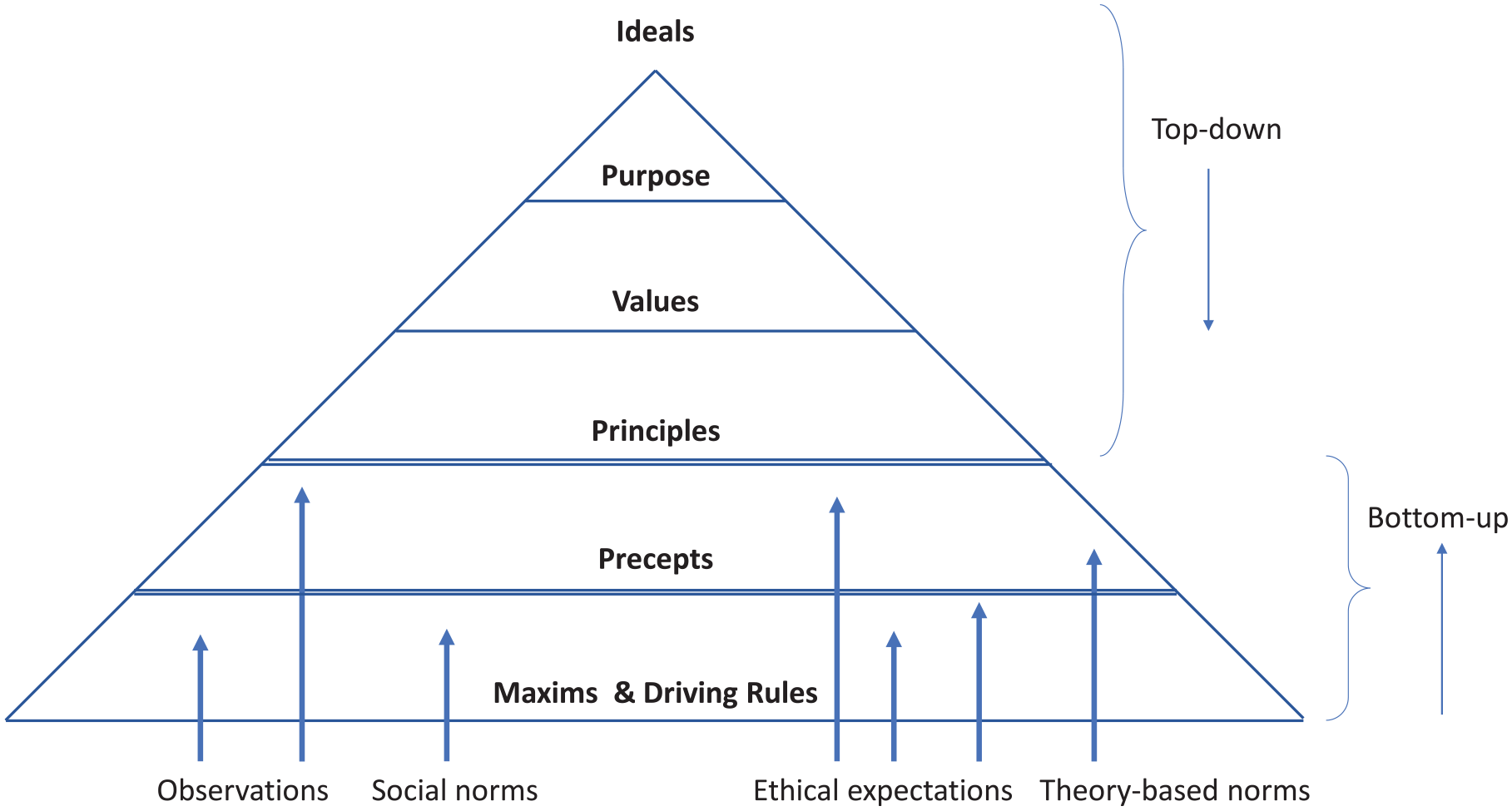
Structured hierarchy.
Rule Development
Rule design and development requires two “playgrounds”: (i) a practical and logical environment for formalizing and defining specific maneuver sequences as well as the means to test and iterate them, (described earlier in the introduction), (ii) a conceptual environment, such as the structured hierarchy and a method to guide the ideas and thinking necessary to generate rules.
We use maxims, a form of high-level rules, to capture the ideas and thinking behind different road conditions and situations and then derive driving rules from them. The Prussian philosopher Immanuel Kant used a similar formal approach to evaluate the logic behind ethical conduct and rules.
For Kant (1785/1993), maxims are policies used by a decision maker to guide specific conduct. The form of a Kantian maxim has three main parts: [1] the action or type of action, [2] the conditions and motives, [3] the end or purpose to be achieved by the action and/or the rationale behind the action. Kant’s view is that agents should act only according to maxims that can be regarded as universal laws that all would follow.
Evaluation Approach
To evaluate the universality, goodness and compliance to duty of maxims, Kant developed a set of requirements for ethical conduct which he termed “categorical imperatives” (where type = category; requirement = imperative).
Consider a driver’s maxim which states that “while I’m driving, I must take a positive action to save animals that are in danger.” A driving rule generated from this maxim can be evaluated by attempting to apply it universally. For example, “Every driver must take positive action to save a dog that runs out in front of the car”. Kant’s method requires using the following evaluation process every time people want to make an ethical decision or design a driving rule, whether in a general situation or a specific (road) use case: (1) come up with a maxim for the situation; (2) universalize that maxim; and (3) determine when that universal law should be followed to the letter.
It is clear that the dog maxim should not be instantiated as a universal law in the form above since there are situations when a driver cannot swerve to avoid hurting an animal, such as on a narrow mountain road with a deep ravine on one side. Similarly, transitioning rapidly into an adjacent lane with traffic to avoid an animal could have detrimental consequences for other drivers and vehicles.
The second Kantian categorical imperative reflects people’s need for equity and fairness to achieve self-realization. For Kant, an individual is never merely an instrument (“means”) to someone else’s end, benefit or utility. This leads to the idea that individuals should act in such a way that they never treat others simply as a means, but always at the same time as an end.
The next section presents a set of maxims and driving rules as examples of what can be derived from the hierarchical structure of ideals, purpose, and values, as well as practical observations and theoretical thinking. These conceptualizations and formalizations are sufficiently generic to be able to take on different ideals, purposes, values etc., depending on the prevailing culture, types of observations and theoretical thinking.
Maxims and Driving Rules
Our first rule of the road is avoidance of the road: if there is no real need to take to the road and thereby occupy a valuable slot in the road space, one should not take to the road. The occupancy of a slot contributes to emissions, congestion, and consumes valuable resources (fuel/electricity and vehicle operational costs). It also exposes the driver and occupants to the risks associated with driving. In many cases there are other ways to fulfil the need (internet shopping, virtual meetings, etc.). It may also be possible to use less impactful transportation, such as mass public transportation or walk/bike. The underlying concept is based on Eastern Taoist philosophy: “Act as if you do not exist” (Lao-Tzu, 400BCE/1891). Maxim (M1) integrates this precept into the world of driving by stating that: “Whenever [2] the need arises to take to the road [1] evaluate whether this need can be fulfilled; otherwise [3] avoid occupying a slot in the road space.” This maxim is very clear, and a specific driving rule is not needed.
On the Road Space
However, when and if a vehicle has a meaningful need to take to the road, the vehicle should minimize its impact on the road space. Road users, in particular vehicles, produce a traffic flow from the movement of multiple cars. Many US driving regulations encourage drivers to not disrupt the flow of highway traffic when entering the highway and merging. The traffic code also encourages drivers to resolve ambiguous situations when no specific rules exist by minimizing disruption to the flow. The code also suggests driving defensively and when in conflict not to occupy a slot even if the driver has the right of way.
Nominal Transitions
A vehicle situated in an authorized slot where it has priority (e.g., driving forward in a lane) should not slow down unnecessarily and thereby disrupt the flow of traffic. Although these slowdowns may at times seem trivial, the consequences are disruptive to the traffic flow, since other cars need to pass the slow vehicle, causing unnecessary disruption to adjacent lanes.
We capture this idea in general terms in Maxim M-2: “To [3] lessen a vehicle’s footprint on the road space and infrastructure [2] whenever possible, [1] act in such a way as to minimize the negative impact on other road users, traffic flow, the public space, and the environment.” This leads to more specific driving rule (DR-1): “As a general rule, do not take any unnecessary action that will cause other road users to change speed, slow down, speed, or perform unnecessary maneuvers (irregular, evasive, emergency, etc.) due to own vehicle behavior. When actions are necessary, the vehicle must provide clear-cut indications to all road users as to its intended and actual action.”
Minimization of impact also means longitudinal speed control. When vehicles drive at a constant speed there is less of a demand on other road users to maneuver around them and the road situation becomes more predictable. Driving rule 2 (DR-2) suggests that whenever possible “A vehicle should maintain a constant speed that is commensurate with the flow of traffic; the vehicle should minimize accelerations and decelerations to ensure safety and effectiveness.”
Unique and Considerate Transitions
Consider a situation where a vehicle that wants to claim its next legal slot in the lane identifies another vehicle that has been blocked for an inordinate period of time (e.g., does not have the right of way such as when emerging from a driveway or a small road). The vehicle should consider yielding the slot to the blocked vehicle in situations where this gesture of goodwill will have no impact on the flow of traffic. In this case there is coherence (i.e., no conflict) with maxim M-2. However, when there may be an impact, limited or otherwise, and hence incoherence between yielding (maxim M-3) and maxim M-2, the occurrence and magnitude of this generous act should be calibrated against the overall cost incurred to the other vehicles involved. For example, there should be a more conservative calibration during rush hours and special events or when first responders’ vehicles are involved, and a more lenient calibration to allow kindhearted behavior otherwise.
To account for these adjustments, the following clause in
So far, we have focused on the minimization of negative impacts and handling disruptions. This can be inverted to focus on positive impact. For example, Maxim M-4 states that: “[2] Whenever possible and while complying with maxims M-2 and M-3, [3] act in such a way as to maximize your positive impact on other road users, the traffic flow, the public space, and the environment [1] to achieve harmony with other road users.” One possible driving rule derived from this maxim is DR-4: “When possible and in situations that are less demanding such as DR-3, yield your authorized slot to road users who want it for their own effectiveness and efficiency”. This driving rule allows autonomous vehicles to be supportive of other road users and enhances the experience of all vehicles in the public space by seeking harmony through considerate and courteous encounters. As altruistic as this may sound, if people switch the way they think about effectiveness and efficiency from a local (e.g., personal) gain to a global (e.g., group) gain, the long-term benefits emerge.
Legal Zones
Any lane change is de facto a move from one legal zone to another. As discussed in the introduction, the road space is separated into a disjoint set of legal zones that require permission to enter. In general, a vehicle’s effective routing and tactical or responsive maneuvering in the road space should minimize transitions between legal zones. Maxim M-7a captures this by suggesting that: [3] for the purpose of minimizing transitions between legal zones, [1] entry into another legal zone must be [2] predicated on effectiveness needs (route, traffic, situation).
Secondly, legal zone switching should be done in a way to minimize disruption; for example, by switching to the exit lane reasonably well in advance of the exit (and avoiding the “late runner syndrome,” where vehicles make a lane change maneuver at the last moment). Maxim M-7b, which is applied after M-7a has been satisfied, suggests that: [1] preparation for legal zone switching [2] should be conducted well in advance so as to [3] minimize disruptions to other road users and the flow of traffic.
These two maxims (M-7a and M-7b) lead to the conclusion that given a destination, a judicious vehicle should select a route that has fewer legal zone transitions (e.g., fewer intersections and fewer highway exits). The same applies to known traffic and problematic road situation that might require a legal zone transition. This conclusion is commonly drawn by most people intuitively when, for example, they decide to select a lengthier and more time-consuming route on a major throughfare rather than taking neighborhood roads).
Lane Changes
Lane changes involve a set of cascading rules. Driving Rule DR-10a states that: “while in the lane, do not undertake lane changes unless there is an obstacle to the traffic flow or a routing need and make these changes reasonably early.” Obstacles include situations where the vehicle is blocking a fast lane, and traffic flows cover cases such as being stuck behind a slow truck, where the speed differential is larger than 50%, and where this situation is likely to persist for a considerable amount of time (e.g., the next exit is in 20 km).
Assuming that DR-10a is satisfied and there is a valid need for a lane change, rule DR-10b states that the vehicle can “make lane changes into another legal zone if and only if there is an available and unclaimed slot, and the action will not disturb traffic in the vehicle’s current lane.” An unclaimed slot is a slot that is not the authorized slot of another vehicle and there is no other vehicle that is eyeing or making a claim to this slot. The second caveat makes sure that the transition into the claimed slot will not cause any disturbance to the flow of traffic in its current lane (e.g., vehicles slowing down or stopping in the current lane to allow a transition into the target lane and slot, or worse, vehicles trying to push their way in by slowing and inching their way into the target lane). Thus, an available “slot” must be identified beforehand and with improved technology, the “claim” must be signaled to others, but the transition must not cause other vehicles in the current lane or the future lane to slow down or brake.
DR-10c is a relaxation of DR-10b to account for heavy traffic: “Make lane changes only if there is an empty ‘slot’ and if the transition into and the slot requires minimal speed changes to the car behind or ahead of the target slot.” Here there will be consequences to other vehicles in the target lane: they will have to slow down and possibly brake to allow the vehicle to transition into and occupy the slot. If due to heavy traffic there is no available slot, and the need to make the lane change still persists and cannot be mitigated (e.g., by finding another route or delaying action), driving Rule DR10-d is applied: “Make lane changes when there is a partial slot and when the transition into and occupation of the slot requires reasonable (e.g., more than minimal) speed changes as well as some maneuvering demands to the car behind or ahead of the slot with the assessment that the vehicles around the target slot are able and appear willing to take such actions.” Finally, if all fails and the only way to occupy the slot will invariably cause a significant disturbance to other vehicles including the possibility that they will be unable or will not allow it, or block the transition, the attempt should be suspended. If attempts to initiate the action later that comply with all the above rules are unfeasible given time and distance constraints (e.g., the short distance to the highway exit), the entire set of attempts should be abandoned and Driving Rule DR-10e should be enacted: “If none of the above relaxations allow for making the transition, the vehicle should forfeit the lane change altogether” (e.g., perhaps selecting another route or making a U-turn at the next exit).
Discussion
Despite their unprecedented monitoring and computational capabilities, autonomous vehicles are not sentient beings and have no innate notion of the sanctity of life, let alone duty or responsibility toward others. One way to instantiate these notions is to cast them as a set of high-level maxims and rules for action. We provided a sample of several many maxims and driving rules detailed in a recently published ISO (2023) standard. In addition, the standard provides maxims and rules for maneuvering in response to emergency vehicles and in unavoidable crash situations (the “trolley problem”). The hierarchical structure and framework suggested here does not supply the content of ethical consideration per se, rather it delineates the form through which ethical maxims and rules are situated in. This form can be applied to similar domains such as automation and robot ethics as well the more distant domains of bioethics and artificial intelligence.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.