
Abstract
Automation’s imperfection requires driver engagement to handle challenging tasks, creating interdependent relationships where both parties influence each other. Therefore, it is vital to support driver-automation interdependence to align their behaviors with team goals. We expand the Interdependence Analysis (IA) method to evaluate interdependent relationships within driver-automation teams, considering their situational property (e.g., cost of task failure) and the timescale of team tasks. We used the proposed IA to assess the interdependence between a driver and the Tesla Model Y when its Automatic Lane Change feature is engaged. The proposed IA revealed that trajectory planning for lane-changing is performed without driver involvement despite the task’s high cost of failure. Timescale decomposition suggested that trajectory planning relies on short-term road user movement and lane predictions, identifying the specific task and timescale to be supported. This study demonstrates the benefits of considering situational property and task timescale in analyzing interdependence within driver-automation teams.
Keywords
Background
The increasing capability of automation relieves humans of some duties, but it still requires human assistance and collaboration since it is not perfect. This collaboration creates an interdependent relationship where both parties influence each other’s actions during interactions. Identifying such interdependence is vital for aligning teammate actions according to team goals, but it is challenging due to its abstract nature. The Interdependence Analysis (IA; Johnson et al., 2014) offers a systematic method for identifying interdependence in human-automation teams. However, it only considers teammate capability and not situational properties and task timescales, which also affect interdependent relationships (Chiou & Lee, 2021).
The fundamental assumption behind the original IA approach is evident in Johnson et al.’s (2014) definition of interdependence, which suggests interdependence is based on the relative capabilities of teammates (individual property) and their coordination to address these dependencies. Evaluating teammates’ capabilities and coordinating tasks based on the evaluation is crucial in supporting interdependent relationships. Guided by this assumption, the original IA assesses interdependence by checking the primary performer of a given task, whether the primary performer can adequately complete the task, whether the task performance could benefit from support from the task partner, and whether the performer receives necessary assistance from the partner if incapable.
However, evaluating teammates in an interdependent relationship should consider situational property (e.g., cost of error) and the task timescale (Chiou & Lee, 2021; Kelley et al., 2002). For example, a 1% error rate in pedestrian detection for driving automation carries a higher cost than a 1% error rate in identifying spam emails for a spam filter. This situational property significantly changes teammate capability evaluation and the teammates’ interdependence. Moreover, repeated short-term interactions, driven by perceived intentions and signals from teammates, give rise to longer timescale patterns of situations influenced by team goals and actions (Chiou & Lee, 2021). Recurring situations evolve into longer patterns of relationships governed by norms. This suggests that teams form interdependent relationships, not only at the one-time interaction level but also over multiple time scales, during which individual and situational properties change (Rusbult & Van Lange, 2003). As a result, there is a need to evaluate teammate interdependence across multiple timescales.
In this study, we expand the scope of IA to consider situational property and task timescale in addition to teammate capability. We demonstrate the value of considering these two factors by analyzing a hypothetical human-automation collaboration scenario using the proposed IA.
Method
The original IA breaks a human-automation joint task into subtasks using task analysis. It then evaluates which teammate primarily performs each subtask, assesses the primary performer’s capability for the subtask, checks if they receive adequate support, and identifies the required support type.
Two modifications were made to improve the original IA method (Figure 1). To reflect the task timescale, the first modification adopted a timescale decomposition procedure to assess how interactions at shorter timescales impact longer-term situations and relationships and subsequent behaviors (Figure 1, Modification 1). We incorporated the operator function model cognitive analysis (OFM-COG; Lee & Sanquist, 2000) into the IA. OFM-COG represents a task structure as input-output connections between subtasks. Each subtask is translated into cognitive tasks (e.g., detect, decide) to be performed by team members using R. B. Miller’s (1974) list of cognitive agent tasks. The OFM-COG was altered to decompose a task into subtasks of different timescales based on Michon’s (1985) definition of strategic, tactical, and operational timescales. Proactive driving tasks taking minutes to hours were categorized as strategic tasks. Short-term driving tasks taking seconds to minutes were categorized as tactical subtasks and reactive tasks occurring within milliseconds were categorized as operational subtasks.
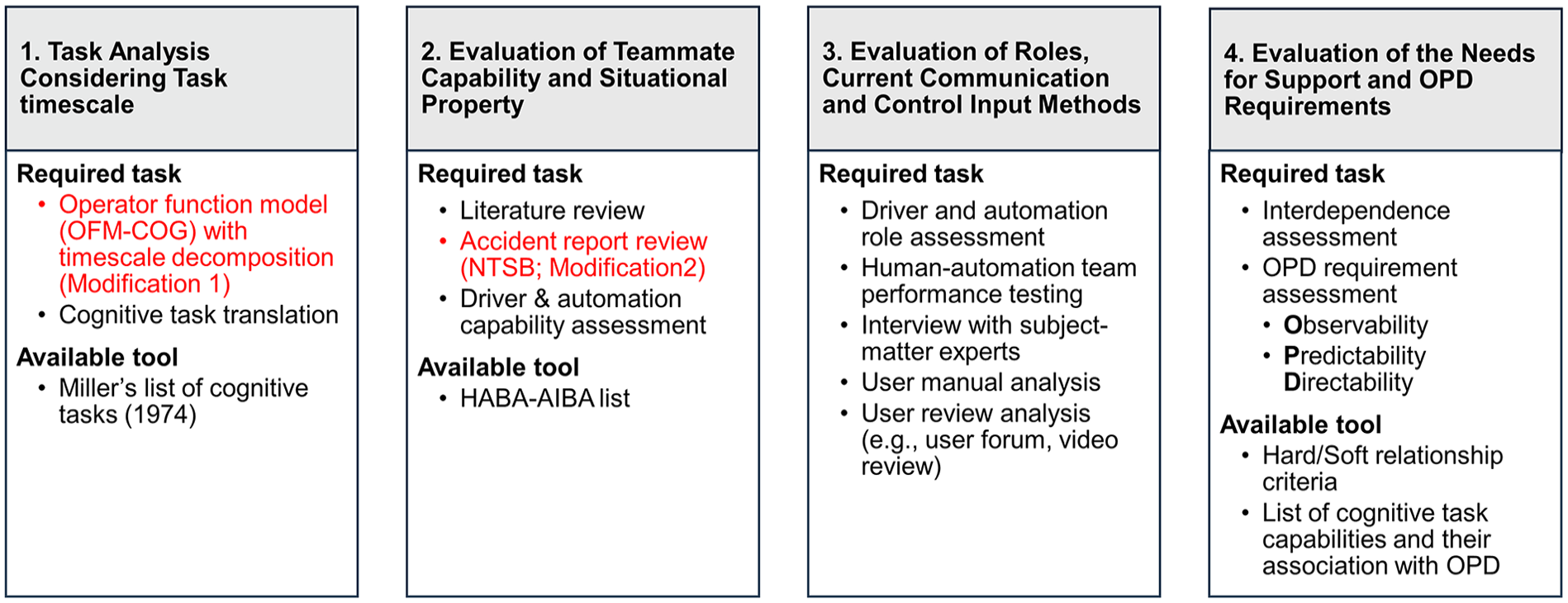
The proposed IA procedure outlining the tasks required for analysis and the tools available.
To reflect situational properties, the second modification adopted new teammate capability assessment criteria (Figure 1, Modification 2). The criteria from the original IA assess the primary performer’s capability at four levels: Capable of handling the task, capable of handling it with less than 100% reliability, in need of assistance, and unable to handle it. However, these levels are not often mutually exclusive, and the assessment can rely on the evaluator’s subjective opinion. More importantly, they do not consider situational properties such as domain-specific situations and the cost of error in operation. For example, computer vision has demonstrated reliable performance in categorizing objects in the surrounding environment (handling it with <100% reliability). However, in driving situations, automation needs the driver’s assistance in rare failure situations with critical consequences due to the high-speed nature of these situations (e.g., National Transportation Safety Board, 2018).
To address this concern, we created the Humans-Are-Better-At/Automation-Is-Better-At (HABA-AIBA) list from multiple Humans-Are-Better-At/Machines-Are-Better-At (HABA-MABA) lists published between 2002 and 2024 (e.g., Bradshaw et al., 2012; Crouser et al., 2013; Flores et al., 2020; D. Miller & Ju, 2015) to reflect the relatively recent advancements in automation capabilities compared to Fitts’s (1951) original list. The HABA-AIBA list ensures objective evaluation by offering a research-grounded and up-to-date assessment of whether automation is better than humans in performing a specific task. Researchers can refer to this list to check whether automation is more capable than humans. To supplement the list with situational property information, we referred to incident reports from the National Transportation Safety Board (NTSB) involving the driving automation of our interest. The NTSB reports provided information about automation limitations and the cost of failure in the driving domain.
We applied the proposed IA method to analyze a hypothetical scenario involving a driver-initiated automated lane change, motivated by the driver’s lane preference. The target automation was the Tesla Model Y (SAE Level 2) and its Auto Lane Change feature. When Tesla’s Autopilot is activated (lane keeping assist + adaptive cruise control), the driver can direct the automation to change lanes by pulling the turn signal lever. Upon pulling the lever, automation checks the surrounding road and changes lanes. We referred to the task analysis of lane change (Chovan et al., 1994) and the owners’ manual (Tesla Inc., 2023) and conducted cognitive walkthroughs to identify the driving tasks performed in this hypothetical scenario.
Results
The proposed IA table is shown in Figure 2. The IA table outlines strategic, tactical, and operational tasks. It defines the input and output information or activities for each subtask at the operational level. In the proposed IA method, tactical subtasks are the main focus for analysis because the support provided for these tasks tends to be more effective and less cognitively demanding than at other timescales (van Gent et al., 2019). For each tactical subtask, the cognitive demand for translating inputs to outputs (Cognitive task column), the primary performer (Performer), and whether automation performs better than humans (Auto capability) are specified. Additionally, the IA table provides information on the limitations of driving automation (Auto limitation) and the means to communicate with each other and impact teammates’ behaviors (Communication interface & control input feature). Finally, the driver-automation interdependence is evaluated based on the information in the previous columns (Relationship type). This evaluation indicates whether the interdependence is “Good-as-is,” whether the team requires collaboration features to support the primary performer (hard relationship, red), or whether such features are recommended but not required (soft, yellow). It also specifies if an interdependent relationship is absent due to the nature of the task.
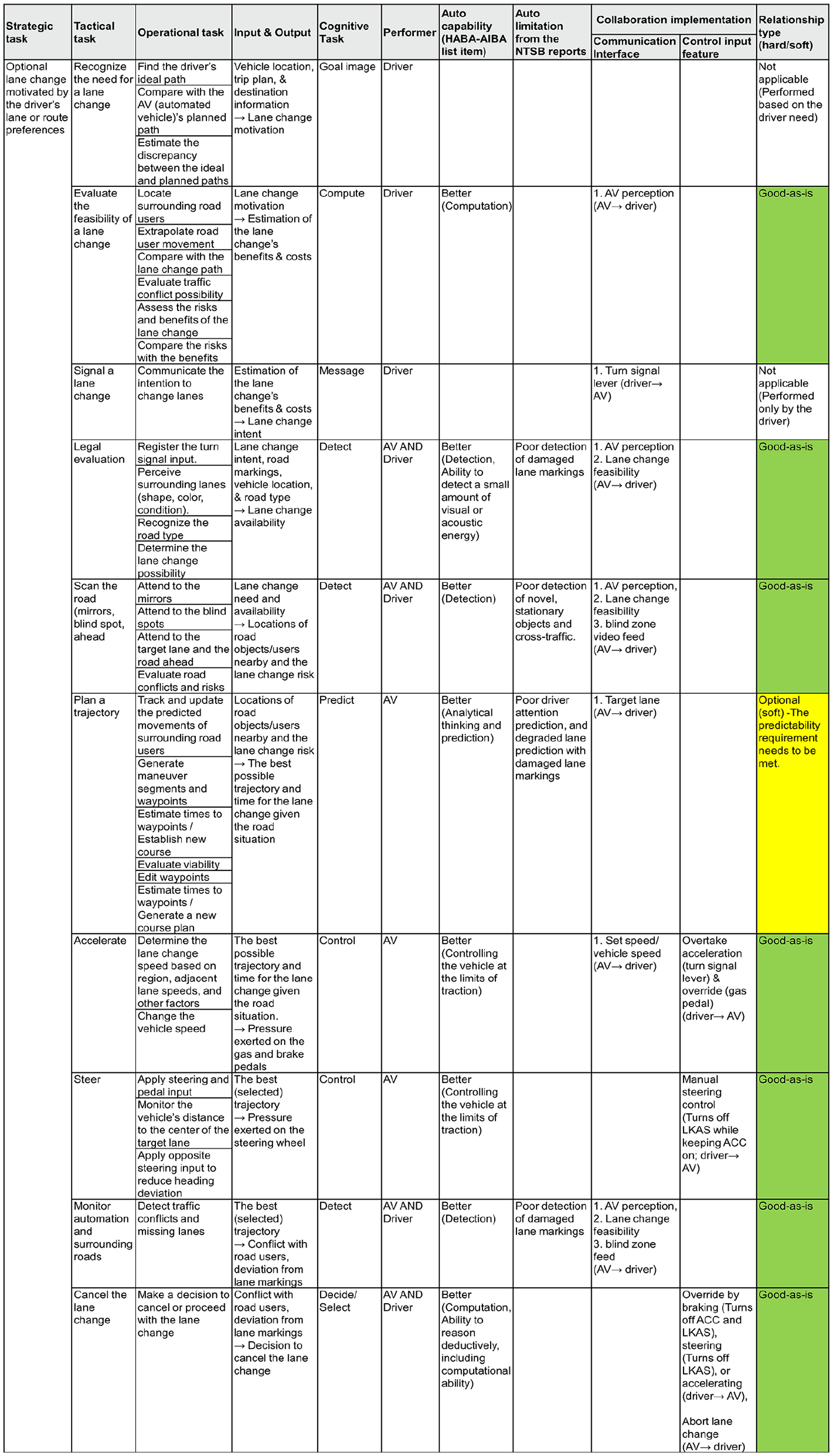
The IA table shows information for assessing interdependence within a team.
The IA table revealed eight interdependent relationships from the hypothetical scenario (green and yellow cells in Figure 2). The result indicates that seven of these relationships are effectively supported. In these relationships, both the driver and automation are actively collaborating, and the reliably performing teammate is constantly engaged in the task, either as the performer or the supporter (green). However, a soft relationship was identified where automation handles trajectory planning without involving the driver (yellow). The timescale decomposition of the lane change task revealed that the operational task of predicting the movements of surrounding road users impacts the longer timescale and tactical “Plan a trajectory” task, making it contingent on a prediction task. Moreover, automation is generally deemed reliable in this task, but the NTSB report informed its degraded performance in the presence of damaged lane markings. Based on these findings, the IA concluded that drivers and automation form a soft relationship, where predictability support from the driver can improve the trajectory planning performance, although it is not required.
The original IA approach by Johnson et al. (2014) focused on revealing interdependence. Our proposed IA procedure enhances its offerings by adding additional insights into HMI design. Our approach provides detailed descriptions of the timescale at which tasks are performed, their cognitive nature, and the situational property unique to a specific domain. These details are sufficient for generating a concrete strategy to support human-automation interdependence. In our example, an application can be envisioned where the driver’s driving styles are monitored during manual driving and modeled by automation (e.g., Kamaraj et al., 2023). This model can predict how a driver would prefer automation to handle similar situations. For example, consider a scenario where a vehicle is ahead of the ego vehicle in the adjacent target lane. When the driver signals the intention to change lanes by pulling the turn signal lever, automation would have two options: either change lanes immediately or accelerate to overtake the vehicle and change lanes once it’s behind the ego vehicle. Automation can make this decision based on its model of the driver’s driving style. This approach enables automation to predict the driver’s preference and consider it when planning its trajectory.
Discussion
Expanding the IA’s scope to consider situational property and task timescale revealed additional perspectives that significantly affected the IA result. Timescale decomposition helped identify the inherent natures of subtasks by examining their effects on subsequent and longer-term subtasks. This improved the evaluation of teammate capability and the identification of required support. Moreover, automation’s trajectory planning would have been deemed reliable without the proposed IA’s new capability assessment criteria, reflecting the situational property of the driving environment.
There are also caveats to consider for future efforts. Firstly, drivers may not consistently adhere to their roles due to automation misuse or insufficient training. Hence, researchers must account for potential deviations in driver behavior when designing strategies to support team interdependence. Secondly, the HABA-MABA lists providing the foundation for our teammate capability assessment criteria have been criticized since they can easily be outdated due to the fast-developing automation technology (de Winter & Hancock, 2015). Moreover, the myth that human or automation weaknesses can be replaced by the strengths of other teammates overlooks the consequences of such replacements (Dekker & Woods, 2002). Assigning tasks to automation where humans struggle doesn’t just change team performance; it also alters how humans interact with automation in ways not captured by the list. Therefore, we propose evaluating teammate capability based on the driver’s tendency to monitor automation relative to its performance, shifting the evaluation’s focus from the dynamically changing automation capabilities to relatively stable driver management tendencies. Lastly, our proposed method evaluated teammates in their designated roles as the primary performer and the supporter. However, the distinction between roles may blur, especially when control transitions are frequent, so the IA needs to reflect the dynamic nature of role allocation.
An IA focusing only on teammate capability may overlook how shorter timescale subtasks affect longer timescale subtasks and how the situational properties limit teammate capabilities. The current paper demonstrates the benefits of considering situational property and task timescale in analyzing team interdependence and designing supportive strategies.
Footnotes
Declaration of Conflicting Interests
The author(s) declared the following potential conflicts of interest with respect to the research, authorship, and/or publication of this article: Joshua E. Domeyer is employed by the Toyota Collaborative Safety Research Center and received funding for the research, authorship, and publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors received financial support from the Toyota Collaborative Safety Research Center for the research, authorship, and publication of this article.