
Abstract
Laparoscopy, a minimally invasive surgical technique, requires precise visuo-motor coordination. Because the surgical field is viewed through a camera which may need to be placed to one side of the would-be direct line of sight, rotational distortion is a concern. This study investigates adaptation to rotational distortions by replicating previous computerized two-dimensional perceptual-motor experiments, and measurement methods, using a non-virtual low-fidelity laparoscopic training simulator. This replication was chosen for the opportunity to observe the best-established adaptation mechanisms (gradual and axis-inversion) and carryover effects. To our knowledge, this is the first time that circular statistics are used to analyze directional error data collected in the laparoscopic environment. Results strongly indicated that gradual adaptation occurs with distortions below 90°, and there is leading evidence that axis-inversion occurs in distortions above 90°. This confirms previous observations of task performance decrement in the laparoscopic environment and provides clarification for new research directions.
Keywords
Introduction
Laparoscopy is a form of minimally invasive surgery in which surgeons operate on patients through small incisions using specialized instruments. The surgical field is viewed via a laparoscope (miniature camera) inserted through one of the incisions. Laparoscopy provides significant patient benefits over traditional open surgery including a reduction in surgical-site infections, shorter hospital stays, less post-op pain, and faster recovery times (Hoffman et al., 2021). Herein, laparoscopy refers to the described surgical procedure, and not to other minimally invasive procedures, like robotic surgery.
There is a pressing need for better laparoscopic training at every surgical skill level (Charondo et al., 2023) due, in large part, to a decrease in training and practice opportunities. Surgical resident hours were capped in the US in 2008, the effects of which elicited calls for simulation training studies (Jamal et al., 2014). Additionally, residency hours have decreased in the UK by 50% since the 80s (Humm et al., 2021). The introduction of surgical robots, such as the Da Vinci system, has also decreased training and practice opportunities. While robotics allow surgeons to conduct minimally invasive procedures without some drawbacks inherent to laparoscopy, these approaches come with their own shortcomings. Specifically, surgical robots consistently increase procedure costs (Wilensky, 2016) while inconsistently providing improved outcomes (Hoffman et al., 2021). The technology also demonstrated stagnated safety statistics over a 14 year period and caused a not insignificant number of fatalities (Alemzadeh et al., 2016).
Background
The current study addresses a persistent laparoscopic training challenge: rotational distortion caused by viewing the surgical field from a camera’s perspective. Rotational distortion, a perceptual motor distortion, significantly contributes to the long learning curves associated with laparoscopy (Rahimi et al., 2023). In laboratory research such distortions consistently predict significant performance decrements (Klein et al., 2015).
Perceptual-motor adaptation research has been studied extensively via prism distortions (Welch et al., 1993). The perceptual-motor literature most relevant for this study observed pointing and tracking tasks which used a 2D computer interface. Those experimental devices include digitizing tablets, joysticks, and styluses to control cursor movements. The cursor originates in the center of a screen and participants move it to one of eight equidistant targets arranged in a ring around the origin. A rotation of the input device creates rotational distortions in the visual feedback, which is used to test the adaptability of a user’s sensorimotor system. These studies consistently observed similar performance profiles and theoretical adaptation mechanisms (Abeele & Bock, 2001; Bock, 2013; Bock et al., 2003; Cunningham, 1989).
The two distinct performance patterns reported show a peak deficit between approximately 90° and 135°, and superior performance (relative to other rotational distortions) around 180°. The two adaptation mechanisms proposed to account for these profiles are (a) a gradual adaptation and (b) an axis inversion (Figure 1). The former involves a continuous adjustment of the internal spatial relationship between visual input and feedback. This mechanism is primary when participants are exposed to distortions less than 90°, either clockwise (CW, negative rotation) or counterclockwise (CCW, positive rotation). The latter mechanism involves a “flip” of the internal representation of movement directions by 180°, which can allow for a quick adaptation to a 180° distortion. Between 90° and 180° the two mechanisms are used in combination. For example, when adapting to a 135°distortion, participants might first adjust by performing an axis inversion of their internal input model and then gradually adjust back by 45° (Figure 1c) to achieve accurate hand-eye coordination. Lastly, carryover effects confer either benefit or decrement, dependent on the ordering of distortion exposure. As one example, practice at CW 30° will benefit later performance at CW 60° but interfere with performance at CCW 30°.
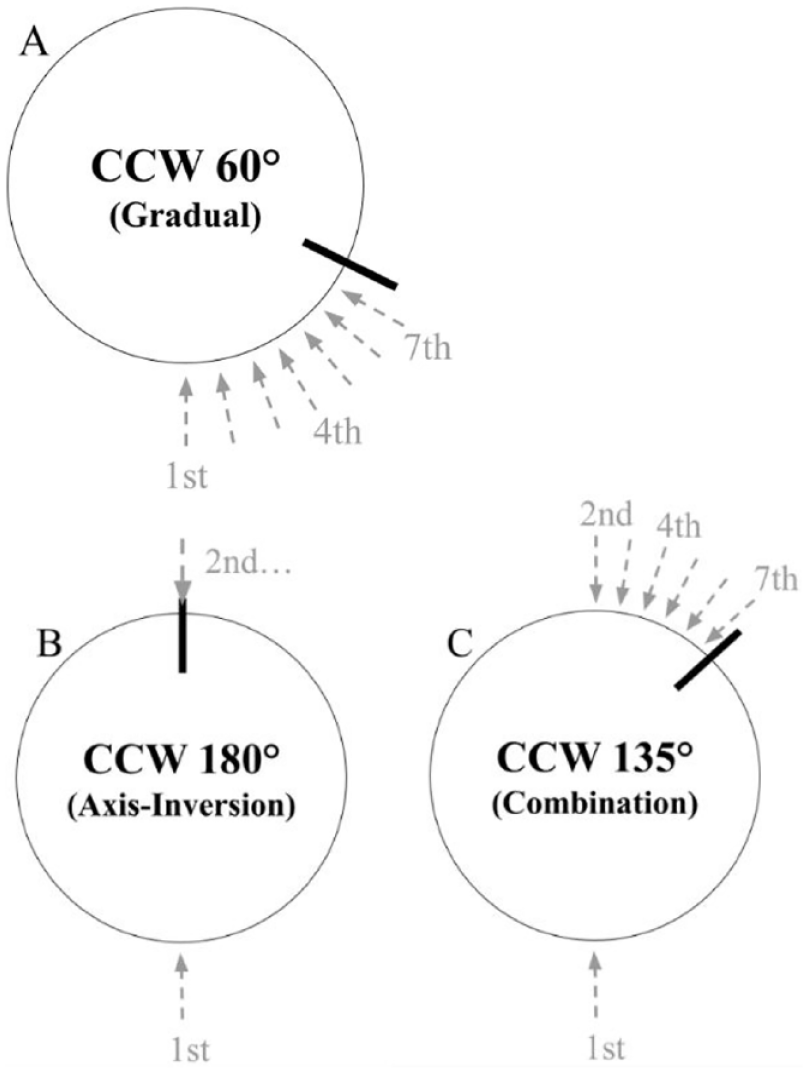
Simplified diagram of gradual adaptation (A), axis-inversion (B), and their combination (C)
Closing the Gap
Manifestations of the documented mechanisms, decremental profiles, and carryover effects have been observed in the laparoscopic environment. Both movement time on touch tasks (Klein et al., 2015; Tharp et al., 2023) and number of transfers in a peg transfer task (Neilson & Klein, 2018) show patterns consistent with the established 2D literature described above.
While performance effects of rotational distortion have been observed, the direction of adaptation (CW or CCW) has not been ascertainable in a laparoscopic environment, as it has been in 2d experiments. Such understanding will disambiguate how participants are adapting while their performance changes. For example, it has not been shown that participants perform an axis inversion and then gradually adjust their direction CW when presented with a 135° distortion. With this clarity, future applied research in this domain can more assuredly know which basic perceptual literature is relevant to a current research question.
Circular Statistics
Linear statistics are not appropriate for analyzing directional data. The largest issue which circular statistics solve in this data set is a “wrapping” problem (e.g., angular errors of +180° and −180° are linearly different but directionally identical). These methods have not been used in the aforementioned 2D literature but should be used anywhere such periodic data is analyzed (Cremers & Klugkist, 2018; Jammalamadaka & Sengupta, 2001). This family of techniques also provides correct measures of variance which are key for this work.
Current Work
In order to observe the three adaptation patterns illustrated in Figure 1, and known carryover effects, the authors replicated a set of experiments reported by Bock et al. (2003). To orient participants to the apparatus described in the methods section, all participants first completed a block of 20 target acquisitions without any distortion (0° rotation). Subsequent trial blocks required 56 (four targets randomly assigned 14 times) target acquisitions. Each trial block was performed under one rotational distortion. The series of blocks were administered in one of the four following sequences:
(A) 30°, 60°, 90°, then 120°
(B) 120° then 150°
(C) 120°, 90°, 60°, then 30°
(D) 30° then −30° (330°)
Our hypothesized outcomes describe the Bock et al. findings and were as follows.
(H1) The two conditions which start below 90° (A and D) will elicit gradual adaptation patterns.
(H2) The two conditions which start above 90° (B and C) will elicit an axis-inversion and subsequent gradual adaptation.
(H3) In both conditions which pass through the 90° threshold (A and C) participants will demonstrate performance decrement at 90° and the subsequent exposure (120° and 60° respectively).
(H3b) The descending condition which passes through the 90° threshold (C) will elicit a second axis-inversion in the final 30° distortion.
(H4) The final distortion in the D condition will demonstrate performance interference at −30° due to the immediately prior exposure at +30°.
Methods
Eighty Texas Tech University undergraduate students aged from 18 to 47 (M = 20.4, SD = 4.4) were recruited. Students were granted research credits toward the psychology class in which they were enrolled. All participants had normal or corrected to normal vision, normal color vision, no neuromuscular dysfunction, and were right handed.
Technology
A low-fidelity laparoscopic simulator was used to induce rotational distortions that mimic those in laparoscopy. The simulator was composed of a cylindrical, opaque box with a webcam mounted to the interior wall (Figure 2). The camera transmitted an image of the target (task) area to a video monitor. The simulator was placed on a table with the monitor directly behind and in full view of participants. The box was rotated to induce the distortions. Because the camera is inside the device, the view of the target area on the monitor remains static at all rotations of the device.
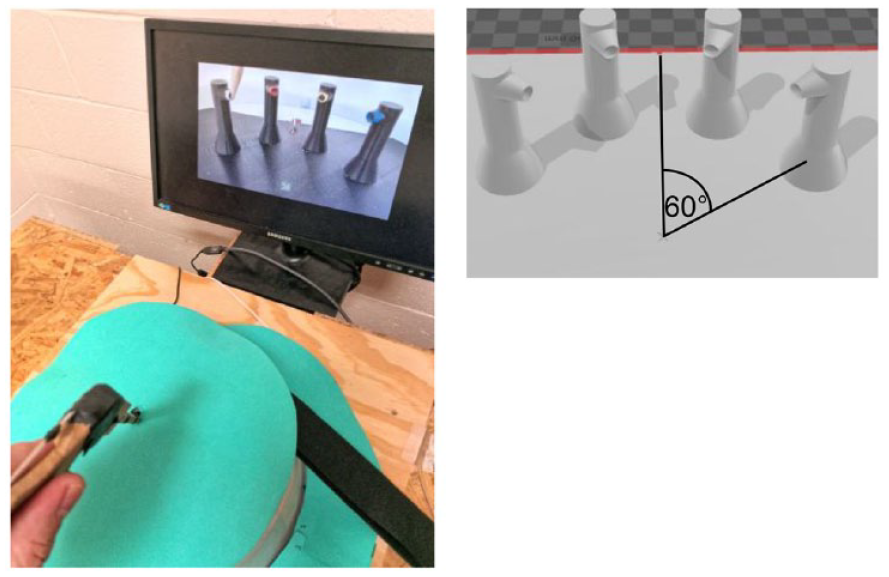
Monitor, apparatus, and target area.
The target area consisted of a “home” target on the apparatus’ base, and four raised colored targets. A wooden laparoscopic pointer was outfitted with two motion sensors and used for the pointing task. The pointer was inserted through a small opening in the simulator’s top. Sensors allowed for interpolation of the pointer’s tip and its relation to the targets. A C++ program was used to run the motion tracking system (trackSTAR, NDI, Canada), make target announcements, and produce 255 Hz recordings of each trial.
Session Process
Before arrival, participants were assigned to one of the four sequences. When they arrived, they were greeted to confirm identity and were asked to sign a consent form. Once completed, the experimenter briefly demonstrated the touch task and dismissed the participant for a restroom break to prevent session interruptions. After returning, the participant was asked to touch the targets with the pointer in any manner that was comfortable, using the laparoscopic setup with no rotation. Once a participant was comfortable with the environment, the experimenter explicitly demonstrated guidelines for conducting the task. Explicit rules included (a) only move after hearing direction from the computer, (b) to complete a movement touch the tip of the pointer to the center of the target, (c) do not drag the pointer along the environment to find the target, and (d) if you miss the target on the first attempt do not restart the entire movement.
After guideline instruction, participants completed handedness and demographic questionnaires. Next, the familiarity block without rotation was performed with explicit reminders about the guidelines after any mistakes. Subsequently, participants completed their assigned trial blocks with minimal reminders from the experimenter. Once finished, participants were debriefed.
Touch Task
Each target acquisition in the touch task requires two movements, one from the home position to the target and a second to return to the home position. Participants moved the tip of the pointer between the home position marked with an “X” and one of four randomly assigned targets. The targets were risen 5 cm off the base and arranged in a semi-circle along a 5 cm radius from the home position with 40° between them. After the computer announced a target, the participant would move the tip of the pointer to the assigned target. Once the target was acquired, the computer would produce an audible chime, then announce the next target.
Between blocks experimenters would move participants outside the line of sight of the simulator without indicating to the participant that a rotation would occur. Then, the experimenter would adjust the device to produce the next prescribed distortion.
Measurement
Consistent with previous 2D rotational adaptation research, the current work uses the angle formed between the perfect and actual initial directions as the central measure. This angle is herein termed angular error (AE). The perfect direction is considered to be directly toward the target from the movement origin. An observed initial direction is measured from the origin to the point of maximum speed in a participant’s trajectory, before moving 2 cm from the origin. Bock et al. (2003) did not give explicit reasoning for using maximum speed as a direction defining feature. Our rationale is that participants instinctively move quickly at first, then slow down to correct directional error. Thus, the initial direction ends where speed begins to decrease.
Different from Bock et al. (2003), we instituted a 2 cm limit (distance from the origin) for measuring error. We instituted this limit after pilot work revealed a notable amount of false direction indications introduced by the leverage of the pointer, near the end of movements. In the Bock et al. experiments, participants simply moved a joystick or traced a finger on a trackpad and did not have to acquire a target. In the current design, participants were outfitted with a 15” pointer which amplifies hand movements similar to a symphony conductor’s baton. They further had to touch the target with the pointer. These amplifications become problematic when participants struggle to touch a target in the final stage of movement. Though all of the movement data is retained, the 2 cm limit obviated those problematic motions from our analysis.
While AE was used for all statistical analyses, graphing becomes more communicative with a linear transformation. By summing AE and the degree of distortion under which the AE was recorded, a demonstration of directional adaptation emerges (Figure 4). For example, if a participant had −30° (CW) error in the +120° (CCW) distortion, the graph shows a mark at +90°. Plainly, both the distortion and how well participants were adapted can be displayed on the same chart. Herein, we term this measure adaptation level (AL). This summing is also used in Table 1.
Williams-Watson Results for First and Last Sub-Blocks.
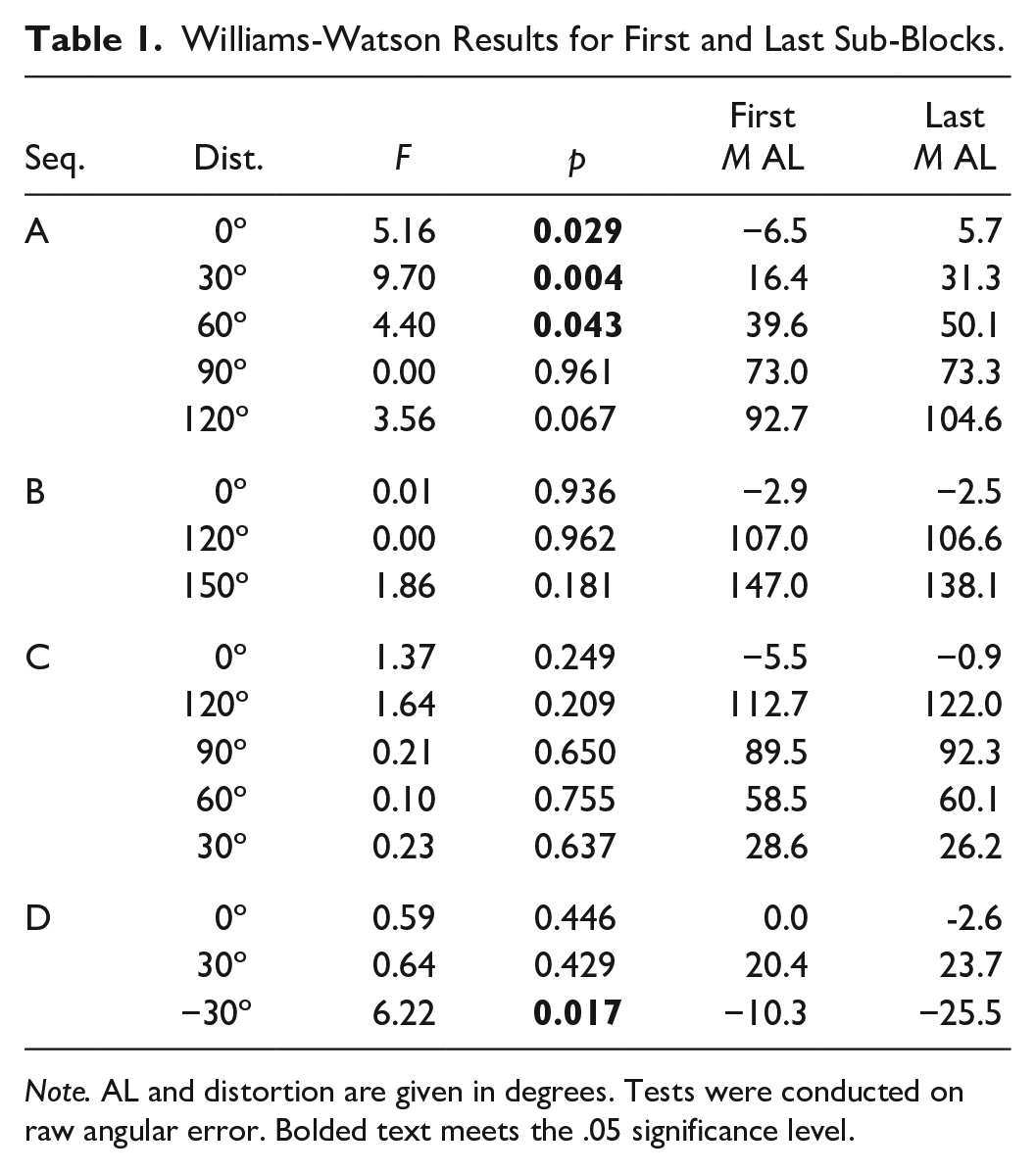
Note. AL and distortion are given in degrees. Tests were conducted on raw angular error. Bolded text meets the .05 significance level.
It is important to note that none of these measurements are actual direction, and so should not be called “response direction.” In this experiment, and in all previous 2d experiments referenced herein, the direction to the target is disregarded in calculations and reports. That is, if the target is 60° to a participant’s right (Figure 2), that 60° value is not used in the AE calculation. Only directional error measured as the participant moves toward a target is used to calculate AE.
Analysis
Circular statistics were used to detect a significant change in directional error between the first and last sub-blocks (14 trial means) of each trial block. To first justify each sub-block as a legitimate group of movements with similar AE, Rayleigh’s test of uniformity was used (Jammalamadaka & Sengupta, 2001). This test determines if a set of angles are significantly different from a set whose members are random and equally likely (uniform). The test also returns a mean resultant length (MRL). MRL communicates the strength of directionality among a set of directions (angles measured around the unit circle) which ranges from zero (no directionality) to one (perfectly repeated direction). If there were multiple directions hosted in the data, MRL could be low while still passing the significance test against uniformity.
After establishing groups of movements, tests to determine the difference between those groups could be performed. Here, we used the William-Watson test of homogeneity of means (Mardia & Jupp, 2000) to determine if one set of directional error means in a sub-block were significantly different from another.
To test for consistency of direction, a Von Mises maximum likelihood estimate of kappa (directional concentration) was calculated (Jammalamadaka & Sengupta, 2001). This statistic demonstrates adaptation in terms of error variance with higher kappa communicating higher concentration (less variance).
Results
All Rayleigh test results distinguishing each sub-block as different from uniform were significant (p < .001). In sequences A and D, all error changes gradually moved toward adaptation as expected (H1). However, statistical significance at the .05 level was not obtained in three of six experimental blocks (not 0°) (Table 1). The first sub-block of final rotation in sequence D (−30°) showed notably more directional error than any 30° sub-block, indicating interference (H4). Mean error changes in sequences B and C were inconsistent with 2D findings and no statistical significance was found. The orientation block (0°) in sequence A showed an unexpected significant result.
Kappa results, with higher values indicating lower variability, were as expected in all experimental blocks. Kappa increased between first and last sub-blocks with one exception at 120° at the end of sequence A. This decrease is consistent with Bock et al. (2003) and appears to be a result of the 90° threshold (H4). Concentrations also decreased in every first sub-block, compared to the immediately prior last sub-block. Comparable to other first sub-blocks of the 0° distortion, results were high in the first sub-block of sequence D (Figure 3).
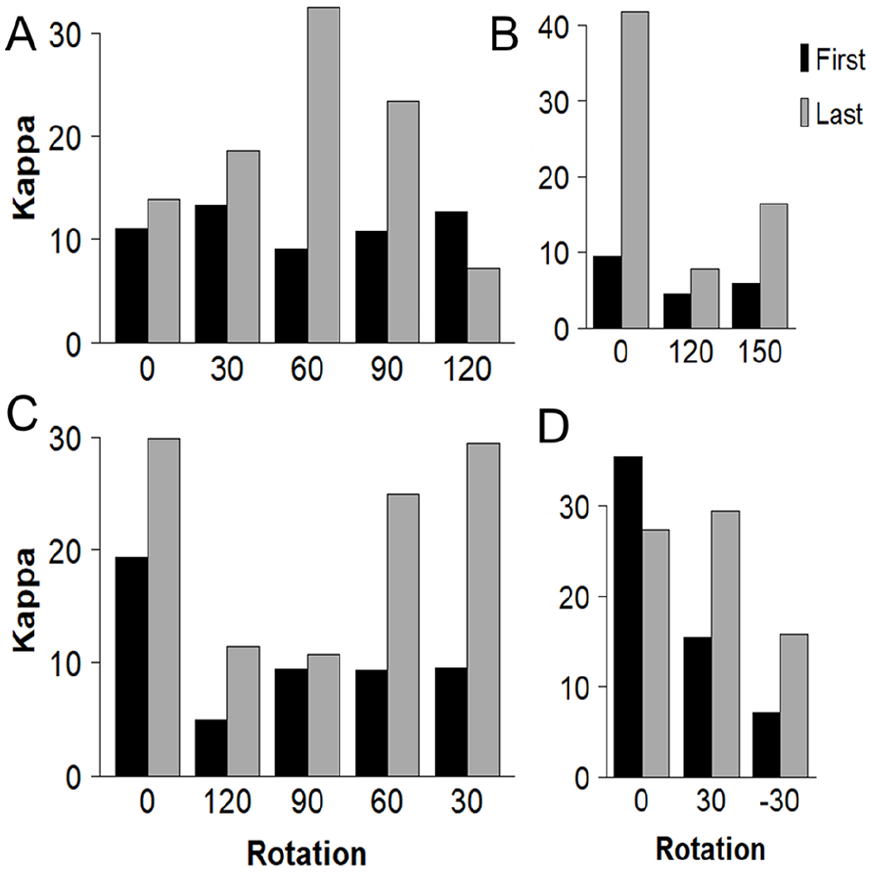
Changes in concentration of error given in Kappa.
Qualitatively, the mean error adaptation pattern of sequence A replicated the Bock et al. 2003 results, showing a gradual adaptation which was decremented at the 90° threshold (Figure 4). The −30° block of sequence D qualitatively replicated the carryover effect seen in 2003. The remainder of the mean error patterns did not replicate.
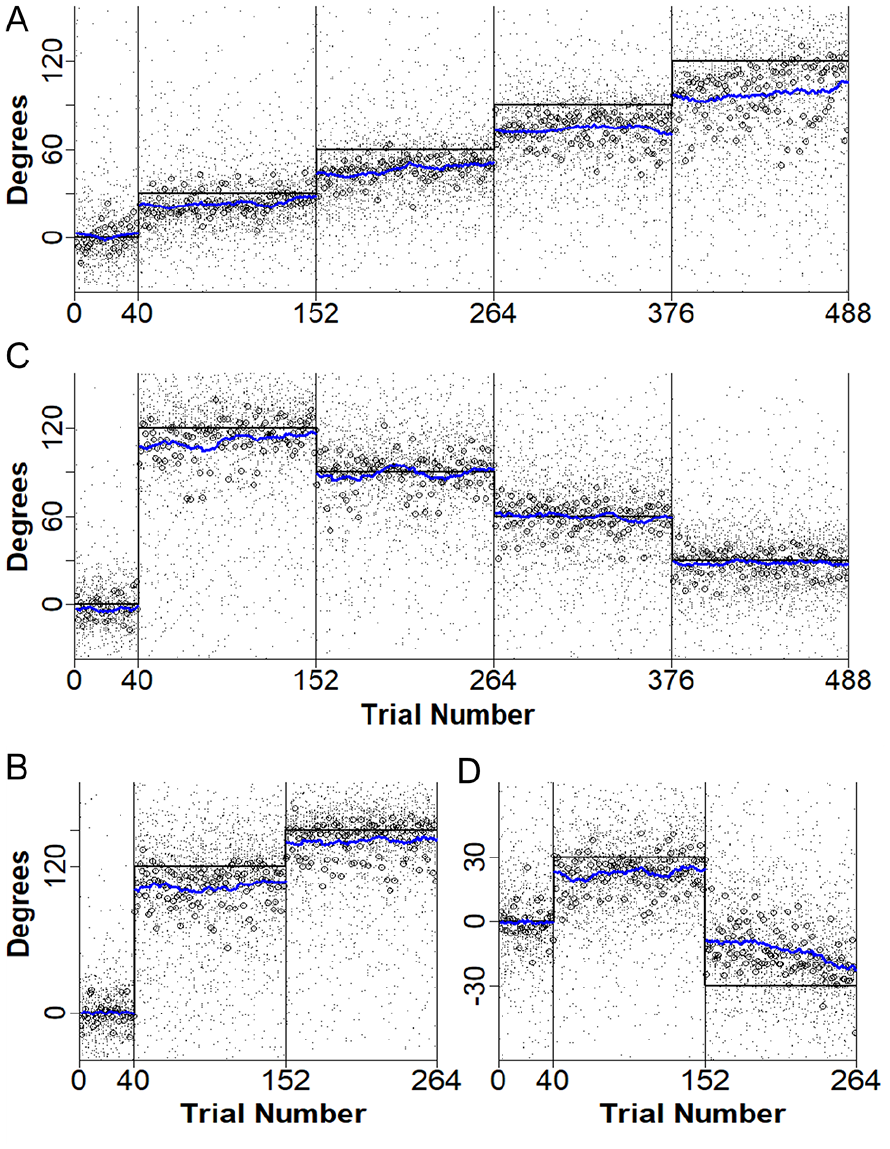
Adaptation patterns across all sequnces.
Discussion
To our knowledge, this was the first deployment of directional error measurement and circular statistics upon data collected using a laparoscopic training environment. Directional error was detectible and H1, H3, and H4 were confirmed, indicating that the current approach is appropriate. Findings also confirm that the cognitive mechanisms laid out in the 2D literature are causal of previous laparosocpic performance observations. The disambiguation of rotational adaptatation where axis-inversion should be deployed is revelatory and should direct research in this field.
Gradual Adaptation
Gradual adaptation, as it has been described in the 2D literature, was deployed by participants where distortions start at 0° and remain below 90° (H1). It is less clear that gradual adaptation as a subsequent adaptation to axis-inversion manifests as it did in 2D experiments. However, the four sub-block series concentration pattern from 120° to 150° (sequence B, Figure 3) have a distinct stairstep pattern. At both rotations the first sub-block shows a decrease then the last shows an increase. This pattern is shared with the other two series of four sub-blocks where participants did not cross the 90° threshold or 0° (sequence C: 60° through 30° and sequence A: 30° through 60°), confirming H3 and H4. This improvement pattern comports with the facilitated 150° adaptation reported by Bock et al. 2003. Though untested, directional error was also lower in 150° than in the previous 120° distortion (Table 1), again indicating that adaptation occurred.
Axis-Inversion
Qualitatively, we did not see a replication of axis-inversion in directional error change as seen in Bock et al. (2003). However, we did see an entirely different pattern of mean error and concentration where axis-inversion is expected to be deployed. This indicates, unsuprisingly, that in a real world environment where participants use tools there is more complexity to be investigated where axis-inversion will be deployed.
Future Directions
Circular statistical techniques were successfully deployed and lent an important tool in appropriate concentration measurement. In future analyses, a repeated measures technique should be used. This will allow us to control for indivual variance. An exploration for other applicable circular techniques should also be conducted. The tools deployed in the current work were effective, but more sophistication is called for and possible.
The current work replicated the use of maximum speed as a defining feature of directional change. This is confirmatory, but the approach can be sophisticated into a measure which parses false readings in a more complete way. The 2 cm minimum threshold is also a feature which should be thoroughly examined. The positive effect of its deployment indicates that it may be tuned to produce more veridical data.
Footnotes
Acknowledgements
Victoria Shields, 3D Art Annex, Texas Tech University
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.