
Abstract
Active exoskeletons are driven by controllers that execute commands that respond to a user’s intent. It is unclear how precise these systems need to be to assist humans efficiently and reduce the risk of injury. This study evaluated participants’ stride length during powered ankle exoskeleton walking while controlling the quasi-stiffness coefficient, the relationship between exoskeleton ankle torque and ankle angle. Compared with the reference quasi-stiffness value, 31% of participants showed a statistically significant increase in normalized stride length (NSL) at high and low quasi-stiffness coefficients. In comparison, 50% showed a statistically significant decrease in NSL. Only 19% showed a statistically significant increase at either low or high quasi-stiffness coefficients. The results suggest that it is essential to consider individual responses, as different stride lengths emerged from changes in quasi-stiffness across participants. This knowledge is important for improving user experience and performance and ensuring the system is used efficiently.
Introduction
Exoskeletons are an emerging technology used in medical, occupational, and military applications to enhance, assist, and support the user’s capability. Active exoskeletons, which utilize powered components such as motors, have controllers that store and execute commands to the exoskeleton. There are still many uncertainties regarding how a user adapts to an exoskeleton and its control parameters (Malcolm et al., 2018; Nuckols & Sawicki, 2020; Peng et al., 2022), both in terms of biomechanical measures (e.g., gait kinematics) and psychological measures (e.g., the user’s trust in the system).
Control parameters that can be adjusted include the torque magnitude, timing, or quasi-stiffness coefficient. The quasi-stiffness coefficient represents the relationship between exoskeleton ankle torque and ankle angle. Several studies indicate that changes in exoskeleton control parameters result in different physical responses by the users when averaging across participants or considering individual participants. Song and Collins (2021) reported changes in the magnitude of torque provided to the user by an exoskeleton resulted in changes in the user’s self-selected walking speed. Galle et al. (2015) found that changes in exoskeleton actuation onset timing resulted in changes in user net metabolic power. Another study examining exoskeleton parameters showed that changes in the magnitude of peak torque and peak time resulted in changes in muscle activation in the soleus (Wang et al., 2020). It is apparent that changes in exoskeleton parameters result in unique individual responses while wearing the exoskeleton, and it is currently unclear how precise these changes need to be to optimize user performance. Therefore, it is important to understand how biomechanical measures are affected by changes in exoskeleton control parameters, such as the relationship between torque and angle ankle.
To maximize human-exoskeleton fluency, it is important to understand the precision level required in changing control parameters to optimize performance. This study aimed to characterize individual stride length during powered ankle exoskeleton walking while changing the quasi-stiffness coefficient. We hypothesized that there would be variation in normalized stride length in response to the different quasi-stiffness coefficients tested within and between individuals. Understanding how stride length changes in response to quasi-stiffness can provide insight into factors to consider when introducing exoskeletons into occupational settings.
Methods
Sixteen body-able adults (eight females, eight males, mean age 23 ± 3.24 years) were recruited for this study. The study was approved by the Institutional Review Board at Auburn University. All participants provided written informed consent before the experiment.
Participants wore a bilateral powered exoskeleton (Dephy Inc., Maynard, MA), which assisted torque at push-off during the stance phase of the gait cycle. All participants used one of the five available boot sizes (US Men’s 5.5/Women’s 7, Men’s 7/Women’s 8.5, Men’s 8.5/Women’s 10, and Men’s 11.5/Women’s 13). A custom-designed controller developed by Dephy, Inc. was used. The controller allowed deterministic changes in quasi-stiffness coefficients that generated different exoskeleton ankle torque and angle behavior, changing exoskeleton quasi-stiffness (Figure 1). The quasi-stiffness coefficients in this study were 60, 80, 100, 120, 140, 160, and 180 (arbitrary units), with 120 being the reference quasi-stiffness coefficient.
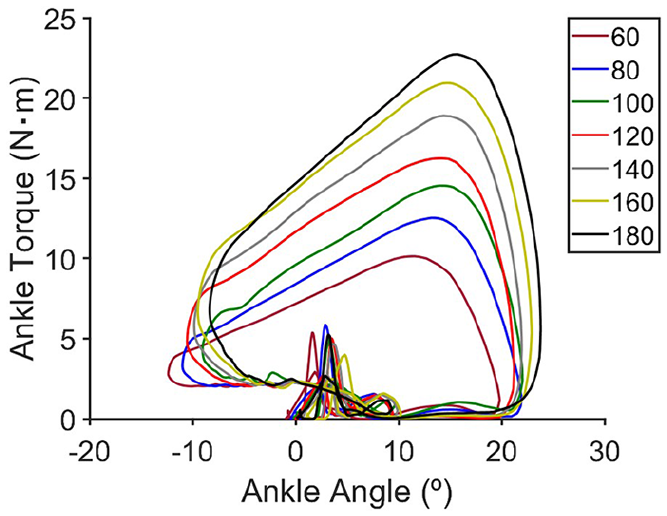
Mean sample torque-angle relationship for each quasi-stiffness coefficient.
The exoskeleton contained onboard sensors that captured angular velocity, ankle torque, and ankle angle at 100 Hz. Reflective markers for motion capture were placed on the body (Plug-In Gait model, adjusted for the exoskeleton) and captured at 200 Hz (OptiTrack Primex13, NaturalPoint, Inc., OR).
Participants walked on a fixed-speed treadmill at 1.25 m/s while wearing the exoskeleton for 5 min at each of the seven quasi-stiffness coefficients, separated by 5-min breaks. A 1-min period ending 15 s before the end of the 5-min walking task for each quasi-stiffness value was binned to evaluate the stride length. Gait cycles were segmented based on the estimated heel strike calculated using data from the on-board gyroscope. Normalized stride length (NSL) was calculated as the distance the treadmill moved between heel strikes, which was determined using the treadmill speed and stride duration, in addition to the displacement between consecutive heel strikes, normalized by dividing by the leg length of the participant.
Data outliers were excluded from the data analysis (<2% strides). Outliers were identified as values greater than the sum of the third quartile and 1.5 times the interquartile range or less than the difference of the first quartile and 1.5 times the interquartile range. The data analysis was conducted using the data of the right leg since no statistically significant differences were found between the left and right legs (p = .8418).
A two-way analysis of variance (ANOVA) model was fit for NSL with factors of participant (random effect) and quasi-stiffness coefficients (fixed effect). Since statistically significant interaction with the participant factor was found, participant-specific one-way ANOVAs were constructed with Tukey HSD post-hoc multiple comparisons. Cohen’s d effect size was calculated for each participant across pairwise comparisons when a statistically significant difference was found to determine the relationship between the variables. A Cohen’s d value greater than 0.5 but less than 0.8 (0.5 < | d | < 0.8) was considered a medium effect size, while a value greater than 0.8 (| d | > 0.8) was considered a large effect size.
Results
Individuals’ gait characteristics, as measured by normalized stride length, differed across quasi-stiffness coefficients. The ANOVA model for NSL indicated a statistically significant interaction effect of the participant and quasi-stiffness coefficients (F(90,5480) = 26.29, p < .001, η2 = 0.3016). Boxplots of NSL for representative participants are presented in Figure 2. The representative participants presented were selected to highlight the variety of behaviors observed.
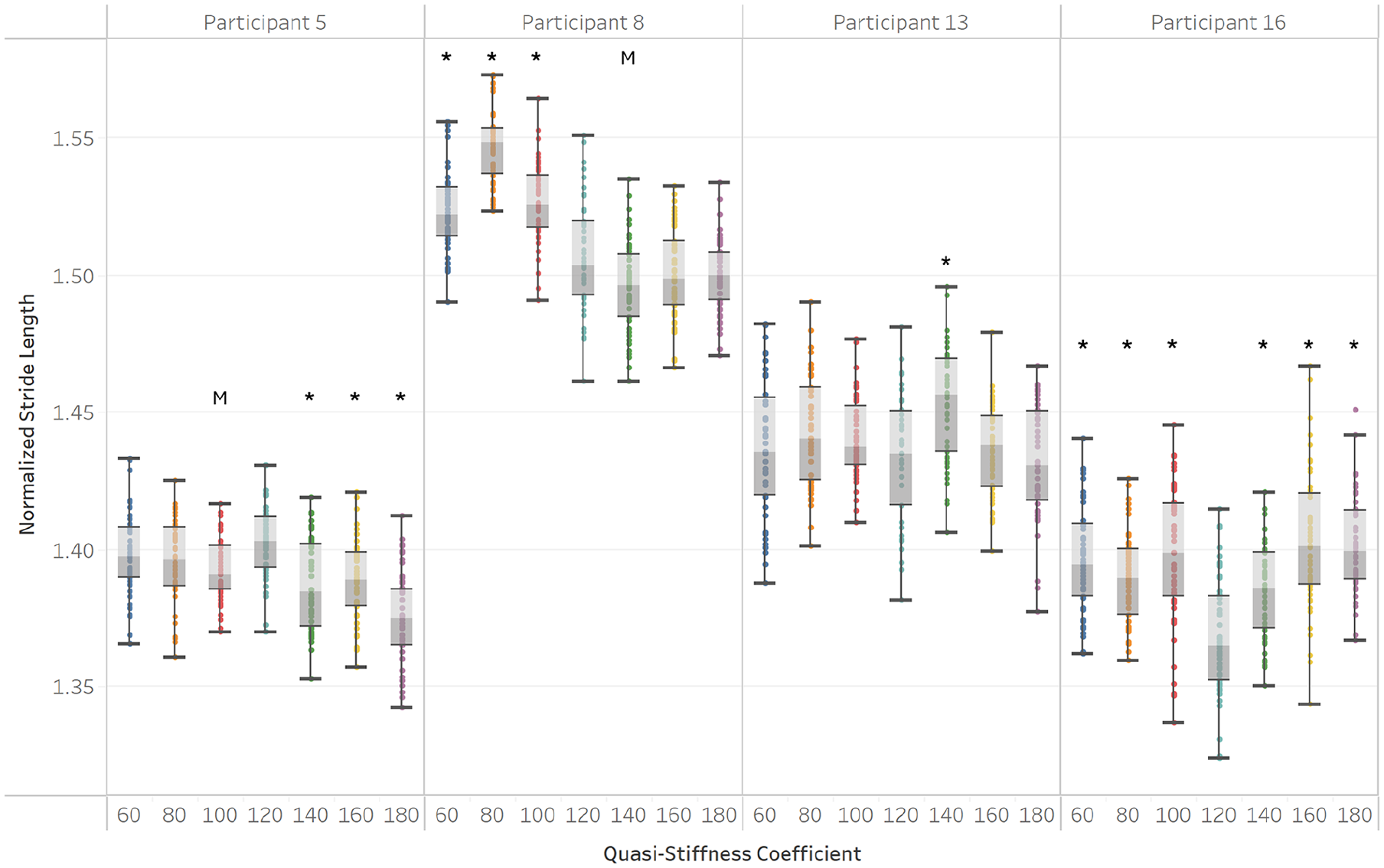
Representative boxplots of normalized stride length binned by quasi-stiffness coefficients. Cohen’s effect sizes for each participant across pairwise comparisons were calculated when a statistically significant difference was found. Statistically significant differences (p < .05) are marked. One asterisk (*) denotes a large effect, and the letter M denotes a medium effect.
Compared with the reference value (120), 31% of the participants showed a statistically significant increase in NSL at both high and low coefficients (e.g., Participant 16). Fifty percent of the participants showed a statistically significant decrease in NSL at multiple quasi-stiffness coefficients (e.g., Participant 5). Nineteen percent of the participants showed a statistically significant increase at either low (60, 80, and 100) or high (140, 160, and 180) quasi-stiffness coefficients (e.g., Participant 8 and Participant 13). Participant 13 showed a statistically significant difference in NSL in the quasi-stiffness coefficient of 140 when compared against the reference of 120. For this participant, a higher quasi-stiffness coefficient of 140 led to an increase in NSL.
Discussion
Normalized stride length was evaluated while walking with a powered ankle exoskeleton as the quasi-stiffness coefficient was controlled. The results of the study support the hypothesis that gait characteristics differ between individuals as quantified by NSL. As seen in the representative participants presented, individual participants differ in how they respond to changes in quasi-stiffness coefficients. In comparison to the reference value of 120, some participants experienced a statistically significant increase in NSL at lower quasi-stiffness coefficients, some experienced a statistically significant increase in NSL at higher quasi-stiffness coefficients, some experienced a statistically significant increase in NSL at both lower and higher quasi-stiffness coefficients, and some experienced a statistically significant decrease in NSL. The relationship between lower leg extremity joint torques and stride length has been documented (Burnfield et al., 2000), and individuals with low strength and low joint torques have been shown to have decreased stride length (LaRoche et al., 2011). In this study, individuals who had increased NSL at higher quasi-stiffness coefficients may have benefited from the additional torque provided by the system, in comparison to the reference value of 120, resulting in longer strides (e.g., Participant 13).
On the other hand, it has been documented that decreased stride length may assist stability (Maki, 1997). Thus, it is possible that participants who had decreased NSL (e.g., Participant 5) felt more unstable at some quasi-stiffness coefficients compared to the reference value of 120 and decreased their stride to increase their stability.
Further research is needed to determine the exact mechanics that may cause increased NSL at some quasi-stiffness coefficients and not others. It is possible that individual preferences, comfort of each specific user with the assistance provided by the system, or lack of understanding about how the system might benefit the user could have affected the results.
This study provides an understanding of how changes in the exoskeleton control parameters, such as quasi-stiffness, can affect a user’s gait characteristics, such as stride length. It also highlights the importance of considering individual responses, as different stride lengths emerged from changes in quasi-stiffness across participants. Understanding how individuals respond and to what degree they respond is essential for identifying how precise exoskeleton system parameters and/or training protocols must be to support optimal user experience and performance. The results from this study can inform requirements for exoskeleton design and training protocols to ensure exoskeletons are used effectively to reduce the risk of injury, enhance or assist the user, and support trust and ease of use to enhance gait capabilities.
There are limitations in this study. This study only included participants aged 19 to 30, so the results may not be applicable to the general population. Also, participants in this study walked at each condition for 5 min, which may not have provided participants enough time to fully adapt to the exoskeleton. Participants walked on a treadmill at a fixed speed and no incline, which is not representative of all walking conditions.
In future studies, it may be beneficial to conduct a two-part experiment, where the first part identifies which quasi-stiffness coefficients, if any, increase NSL for a participant. The second part of the study may examine quasi-stiffness coefficients on a more incremented scale (for instance, coefficients separated by 10, instead of by 20, as was done in this study) to provide further understanding of how the precision of exoskeleton control parameters augments user performance. Additionally, further studies with participants that are middle-aged or older adults may be conducted to compare the responses between age groups.
Conclusion
Based on the results of this study, participants seem to respond in different ways to changes in quasi-stiffness coefficients when walking with a powered ankle exoskeleton. The quasi-stiffness coefficients, if any, that result in an increase in normalized stride length will vary from person to person. As such, it is important that powered exoskeletons allow for changes in input parameters, like quasi-stiffness, to support user performance and efficiency across the user population.
Footnotes
Acknowledgements
The authors would like to thank Lucie Outlaw, Max Miller, and Abby Walden for their assistance in pilot testing and data collection for this study.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by research funding from the Centers for Disease Control and Prevention, National Institute for Occupational Safety and Health (CDC-NIOSH) through a cooperative agreement (Grant No. T42OH008436) with the Deep South Center for Occupational Health and Safety at the University of Alabama-Birmingham and Auburn University. The contents of this manuscript are solely the responsibility of the authors and do not necessarily represent the views of the CDC-NIOSH.