
Abstract
Motor vehicle crashes involving police vehicles significantly impact law enforcement officer (LEO) safety, often occurring during high-risk maneuvers like pursuit driving and sudden lane changes. These incidents are exacerbated by LEOs’ interaction with in-vehicle technologies, including Mobile Computer Terminals. Advanced Driver-Assistance Systems (ADAS) could mitigate these risks, though existing ADAS algorithms are not tailored to the unique work demands. To address these challenges, our study develops predictive models for LEO braking and steering in critical situations, based on a driving simulator experiment with police officers. Both braking and steering models were constructed and identified as effective in predicting police officer braking response and steering. The models can be practically applied as part of ADAS systems to deliver warnings at appropriate times, adapting to police officer demands in critical driving situations. Study implications contribute to the wider body of knowledge on surface transportation, occupational safety, and the use of adaptive models.
Introduction
Motor vehicle crashes (MVCs) involving police vehicles are a significant nationwide problem, as they are among the leading causes of law enforcement officer (LEO) deaths and injuries (Tiesman & Heick, 2014). These crashes often occur in high-risk critical driving situations such as pursuit driving, lane changes, and sudden braking from tracked vehicles ahead (Hutson et al., 2007).
Moreover, LEOs operate while interacting with in-vehicle displays central to their work, such as a Mobile Computer Terminal (MCT), increasing their workload and distraction while driving (Zahabi & Kaber, 2018). Advanced driver-assistance systems (ADAS) features such as forward collision warning (FCW), blind spot monitoring (BSM), and automatic emergency braking (AEB) have the potential to mitigate these risks. However, these features are primarily designed for the wider driving population, failing to account for the unique challenges faced by LEOs and the influence of critical driving situations on workload and driving performance.
Studies have highlighted that a high frequency of unwanted ADAS warnings may induce unintended adverse behavioral effects, leading drivers to prefer switching them off (Iranmanesh et al., 2018; Reagan et al., 2018). This issue is more pronounced for LEOs who are required to interact with other in-vehicle technologies such as radios and MCTs (Zahabi et al., 2022). Therefore, a need exists for an adaptive FCW system that warns officers in specific situations, encouraging them to keep it activated. This system can be enabled through predictive modeling of LEO braking. Similarly, LEOs may not notice the BSM icon in their side mirrors when there is a vehicle in their blind spot, as they interact with MCTs and radios. An auditory warning could be proposed for such situations. However, like the FCW, a risk exists of LEOs switching off BSM due to incessant warnings, despite the benefit of warning LEOs when they are unaware of the vehicle in their blind spot and attempt to change lanes. Thus, a predictive model of LEO steering in critical driving situations would enable a warning to be triggered only if drivers rotate the steering wheel beyond a certain threshold in certain situations.
To address these issues, we conducted a driving simulator study with police officers to examine how FCW/AEB and BSM impact driving performance. Our aim was to develop predictive models for braking reaction time and steering in critical driving situations. The braking model focused on calculating the officers’ brake reaction time to adjust the ADAS warnings when the front vehicle brakes. The steering model aimed to estimate the officers’ maximum steering wheel angle when trying to change lanes with a vehicle in their blind spot. Through this research, we seek to enhance the effectiveness of ADAS features for LEOs, improving their safety and driving performance in high-risk situations, integrating the models into future ADAS systems for LEOs.
Methods
Driving Simulator Study
The experiment was conducted with 18 police officers (Age: M = 37.82 years, SD = 5.41 years). Initially, 24 officers were recruited, however, 6 officers could not complete the experiment due to simulation sickness. All participants had valid driver license, provided written consent, and were sampled from the police officers who regularly drive police vehicles. A fixed-based driving simulator (Realtime technologies, Inc., Ann Arbor, MI) was used in this experiment.
Participants were exposed to 12 driving scenarios. Scenarios varied based on three ADAS types (FCW/AEB, BSM, and a combination of FCW and BSM), two ADAS status (ON/OFF), and two driving conditions (normal vs. pursuit). For pursuit driving, participants were instructed to follow a speeding vehicle at 60 mph throughout the drive. All scenarios were in an urban driving environment with the same traffic level and road conditions.
Each driving scenario included two critical hazards in random sections of the path, and the drivers were asked to react immediately to avoid the critical incident by pressing the brake or changing their lane by turning the steering wheel. The critical incidents happened at least 1 min after the start of each scenario, and there was at least a 2-min time lapse between the two critical events. In addition, drivers were engaged in a Non-Driving Related Task (NDRT) twice in each scenario: once in combination with the critical incident and once in a similar section of the road without an incident to avoid learning effects and predicting the hazard. Brake reaction and steering wheel angle data were recorded from the driving simulator and subsequently used for the creation of the brake reaction model and the steering wheel model.
Brake Reaction Model
The brake reaction model follows an evidence accumulation model (Markkula et al., 2018). The following equation represents the accumulative part of evidence accumulation models:

In which,
Previous work (Engström et al., 2017) indicated that NDRT influence brake reaction by altering how drivers perceive the lead vehicle’s motion, which affects visual looming cues. This effect is notably pronounced when initial headway is short. In terms of pursuit driving, which involves complex operational and tactical behaviors such as high-speed lane changes and overtaking, research has found it significantly increases cognitive load compared to normal driving conditions (Shupsky et al., 2021; Zahabi et al., 2021). Consequently, the heightened workload during pursuit driving likely exacerbates the impact of cognitive load on visual looming, thus impairing braking response. Additionally, in-vehicle technologies such as the MCT add further complexity and may interact with pursuit driving to further influence the visual looming component of the braking model, as suggested by Shupsky et al. (2021). Consequently, the model was extended to account for the effect of NDRT, the effect of pursuit driving, and an interaction effect between pursuit driving and NDRT, as the following equation indicates:

In which,
The braking model parameters were optimized through a grid search across a set of fixed values for
In addition, a comparison of the model accuracy between the basic model (i.e., the model including
Steering Wheel Model
Based on Markkula et al. (2014), the open-loop models provided the best fit for avoidance maneuver. The steering model in this experiment predicts the maximum steering wheel angle when officers drive with BSM and try to change their lane when there is a vehicle in their blind spot. Therefore, the avoidance phase model is suitable for the purpose of this study without the consideration of the stabilization phase. Breuer (1998) found that in an evasive maneuver, the amplitude of steering wheel angle and maximum rate of the steering angle are linearly correlated which suggests a constant duration of steering corrections (Markkula, 2014). The steering wheel angle rates in open loop avoidance models follow a Gaussian distribution function (Markkula, 2015) as defined by Equation 3.

In this Equation,
Results
Brake Reaction Model
The optimal set of parameters in the braking reaction model was selected by finding the smallest difference between predicted reaction times from the model and observed braking reaction times, as measured by the Kolmogorov-Smirnov test. The values of σ, M, k, ρ, η, and γ that resulted in the best model fit for the full model were found to be σ = .35, M = −0.35, k = 7.5, ρ = −.1, η = −.1, and γ = −.1. The values of σ, M, k, ρ, η, and γ that resulted in the best model fit for the basic model were found to be σ = .35, M = −0.5, k = 7. Figure 1 illustrates the cumulative density function plots versus brake reaction time for the basic and full models compared to the experimental data.
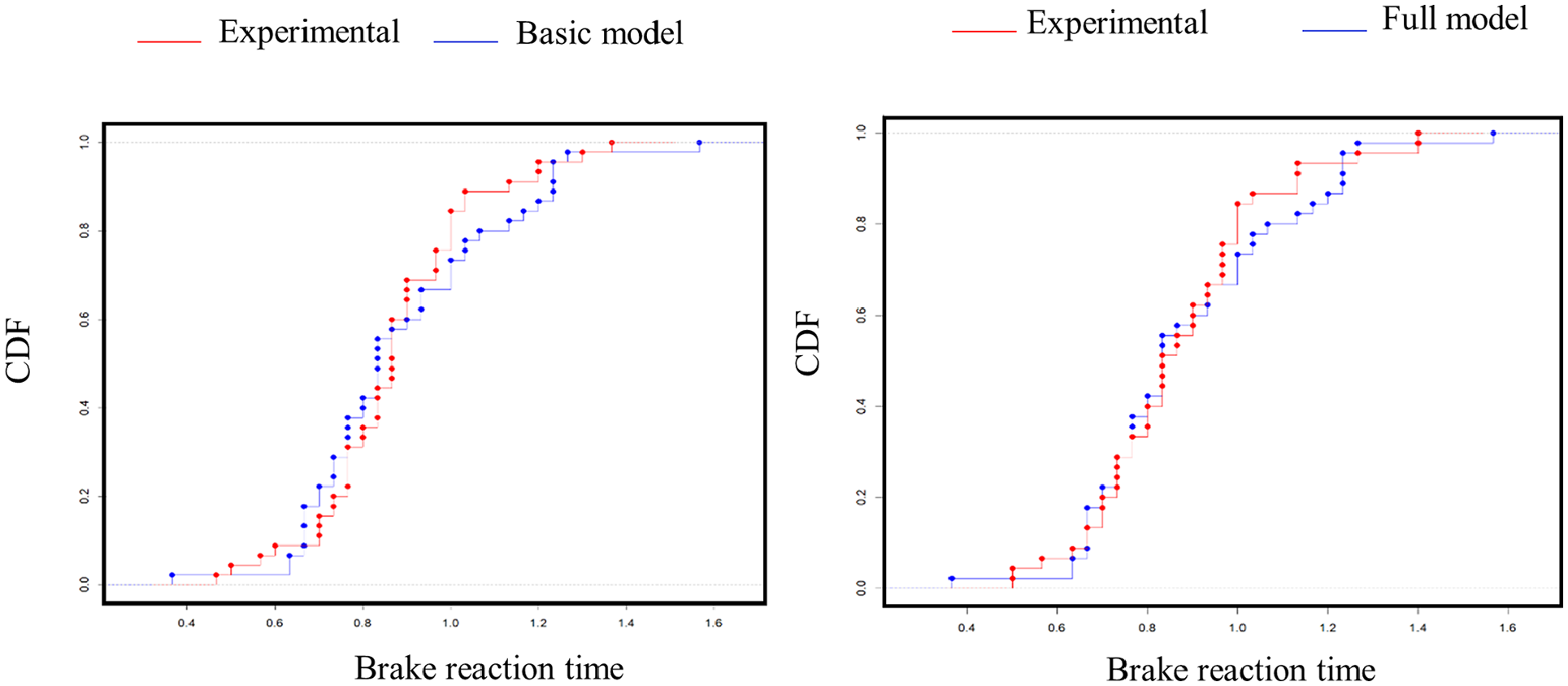
Cumulative density function plots of the basic accumulation model, full accumulation model, and experimental data distributions.
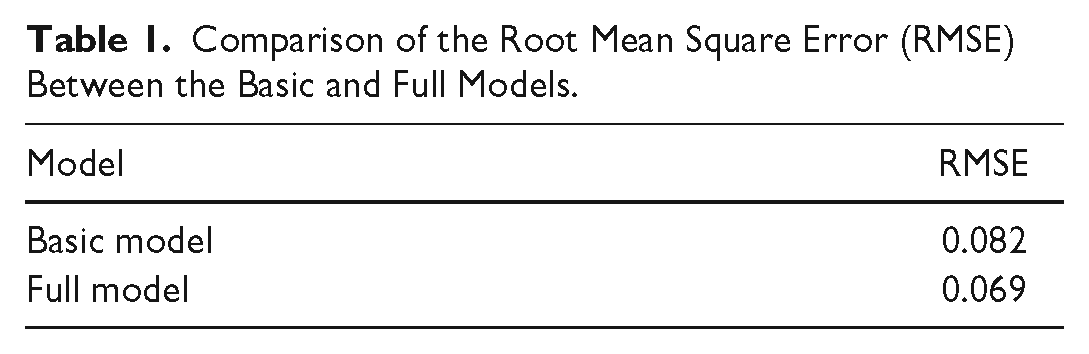
Results from Kolmogorov–Smirnov (KS) test revealed that the observed data and the predicted values by both basic (p = .91, D = 0.11) and full model (p = .19, D = 0.22) came from a same distribution as the experimental data. However, the RMSE of the full model was smaller than the basic model, implying that the full model has better predictive accuracy (Table 1).
Comparison of the Root Mean Square Error (RMSE) Between the Basic and Full Models.
Steering Wheel Model
Results from the steering wheel model optimization suggested that
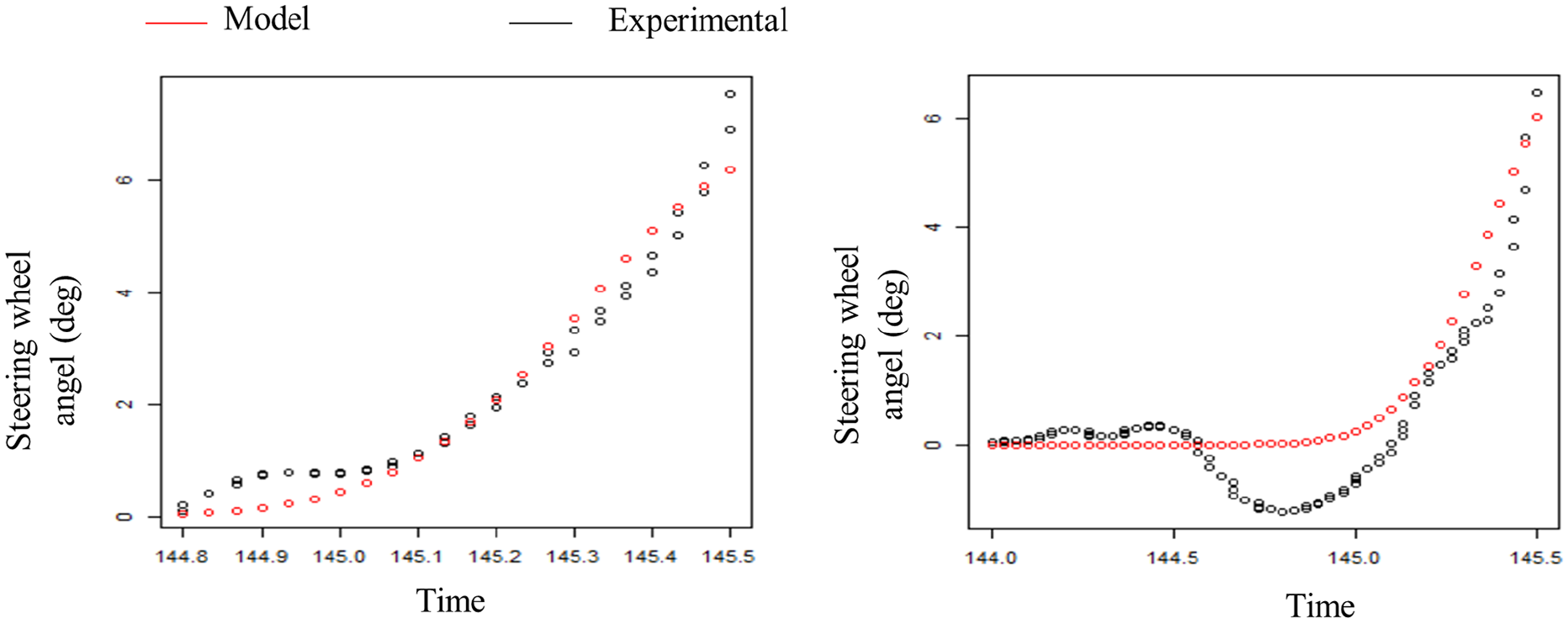
Examples of avoidance steering maneuver for the experimental data and fitted model. The red and black dots represent the model and experimental data, respectively. The left figure represents a good fit, and the right figure represents a poor fit.
Discussion
Brake Reaction Model
The first objective of this study was to develop a model that could predict police officers’ brake reaction time during critical driving situations such as a braking lead vehicle. The brake reaction model revealed that adding additional parameters (ρ = −.1, η = −.1, and γ = −.1) could improve the basic model, as evidenced by a smaller RMSE. The inclusion of these parameters led to longer estimated brake reaction times when officers were under a higher cognitive load, whether due to pursuit driving, NDRT, or the interaction between the two. This finding is consistent with the cognitive control hypothesis, which posits that tasks requiring cognitive control are more affected by cognitive load than tasks that have become automatized through practice.
Previous research suggested that object and event detection (OED) performance (Engström et al., 2017) is impaired by cognitive load in tasks that rely on cognitive control, such as detection response tasks (DRT), which involve responding to visual or tactile stimuli presented at intervals of 3 to 5 s. DRT is typically not extensively practiced and is therefore sensitive to interference from secondary tasks that require cognitive control. Studies have reported that cognitively loading tasks increase DRT response times compared to a baseline (no-task) condition. Similarly, many studies have found that cognitive load increases brake response time or accelerator pedal release time relative to a no-task condition (Engström et al., 2017).
In this study, because the brake situations (i.e., a lead vehicle suddenly braking) were unexpected and therefore unlikely to become automatized even for experienced officers, it is reasonable to expect longer brake reaction times under higher cognitive load due to pursuit driving and NDRT. The results of this model can be used as an input for an adaptive FCW system per officers’ request in a survey study by Wozniak et al. (2021).
Steering Wheel Model
The second objective of this study was to build a model to predict officers’ steering wheel angle when driving with BSM and trying to change their lane when there is a vehicle in their blind spot. Although the RMSE for the model is too small (0.023), the
While this model can be useful in situation where officers demonstrate a predictable steering behavior (i.e., rotating the steering wheel to a certain position, waiting for the lead vehicle to pass, and then continuing to rotate the steering wheel), it might not be as useful in unpredictable situations where we see reverse steering wheel rotation due to the vehicle in blind spot.
Conclusion
The aim of this study was to create a predictive model of police officers’ brake reaction time during critical driving scenarios, and a model of police officers’ steering wheel angle while driving with BSM and attempting to change lanes when a car in their blind spot. Adding extra parameters to the brake reaction model to indicate cognitive load due to pursuit driving and NDRT improved the model and led to a longer estimated brake reaction time. The study also found that the steering avoidance model was not always reliable in critical situations when there is a car in the officer’s blind spot, and that the model could only account for 67% of the variation in data. Study findings can be used as inputs for providing adaptive ADAS for police vehicles.
Footnotes
Acknowledgements
This work was completed when Farzaneh Shahini was a PhD student at Texas A&M University.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was funded by the Safety through Disruption (Safe-D) University Transportation Center (UTC) (grant number: 69A3551747115).