
Abstract

Introduction
This presentation describes a Cognitive Task Analysis (CTA) to identify cognitive requirements and implications for effective Human-Machine Teaming (HMT) and operator trust of autonomous space sensing systems for Space Domain Awareness (SDA) (McDermott et al., 2017, 2018; Militello & Hutton, 1998). This project presented an unusual opportunity to apply the HMT Knowledge Audit to a rapidly evolving capability. Legacy tools are no longer effective in supporting human operators in this growing domain of SDA. At the time of this study, advanced tools to support the increasing complexity of SDA are in beta version. As such, identifying cognitive requirements to support HMT and trust calibration have the potential to influence tool design in important ways.
SDA is a developing mission area within the United States Space Force (USSF) focused on continuous detection, cataloging, and monitoring of resident space objects (RSO) within Earth’s orbit. RSO describes any natural (e.g., asteroids) or artificial object (e.g., satellites) that orbits around a celestial body. For the USSF, SDA covers all satellites, debris, space stations etc., orbiting Earth including foreign, allied, and commercial assets. Since 2010, the number of objects orbiting Earth has increased dramatically from an estimated 14,000 to upwards of 35,000 (ESA Space Debris Office, 2023). To reduce risk to active satellites, spacecraft, and other space systems, government and commercial agencies are focused on maintaining a comprehensive catalog of these objects. These efforts, while improving domain awareness and safety of space operations, have also increased the demand for sensor time and observations and are producing significantly more volumes of data to be analyzed. Legacy software systems such as the Space Defense Operations Center (SPADOC) computer system are struggling to keep up with rapid growth. Additionally, there is a growing need for tools that support operators in dynamic replanning based on evolving missions, objectives, and/or priorities. This need has motivated the development of advanced automation and AI that supports key tasks such as planning, sensor availability management across organizations/services, and interpretation of sensor observations. For this project, we conducted a CTA with existing and future users of a proposed software solution intended to replace SPADOC to provide goal-directed command and control (C2) management of sensors. While still in-development, a beta version is being tested by a small group of SDA operators to characterize the software’s ability to effectively schedule time on a sensor(s) for observations on an RSO(s) of interest.
Methods
Knowledge Elicitation
For this project we used two knowledge elicitation methods within the CTA toolkit: the Critical Decision Method to elicit challenging experiences associated with the SDA operations, and the HMT Knowledge Audit to probe specific aspects of the operators’ experiences related to HMT themes (Hoffman et al., 1998; McDermott et al., 2018). These methods allowed our team to explore how operators make decisions, and to identify the cognitive challenges of the work done today and the work anticipated in the future. Our team interviewed eight current or future users of the proposed tool. Three were part of the development team and five were Space Force personnel currently conducting SDA. Our interviews with Space Force personnel highlighted two key groups of users. One manages collection assets by scheduling sensor observations and, in some cases, manually operating sensing capabilities such as telescopes. The other group tasks collection assets by requesting time on a given sensor(s), and then uses the data collected in pursuit of national defense or other critical activities.
Analysis
We used a three-stage analysis strategy. First, we analyzed interview data using a cognitive requirements table. We reviewed interview transcripts and field notes to identify cognitive requirements and associated information needs, complexities, and strategies. Second, each cognitive requirement was binned into one of seven HMT categories. It is important to note that, while the HMT categories are interrelated and several HMT principles may apply to an individual cognitive requirement, we chose to highlight one primary HMT category for each requirement. Third, we categorized each cognitive requirement in terms of antecedents of trust. For this analysis, we adapted the Ability, Benevolence, Integrity (ABI) framework of human-human trust (Mayer et al., 1995) by extending the ABI framework definitions to better reflect aspects of trust related to HMT. Additionally, we added a fourth category, task assignment, which represents those tasks that cannot be executed by technology without human approval due to limitations of the technology or cultural concerns.
Findings
Cognitive Requirements
First, we identified 22 cognitive requirements for effective HMT with a goal-directed C2 management tool. Next, we organized these cognitive requirements into categories from the HMT knowledge audit (McDermott et al., 2018):
Predictability (five cognitive requirements)
Observability (six cognitive requirements)
Anomalies (three cognitive requirements)
Noticing (one cognitive requirements)
Self-monitoring (three cognitive requirements)
Job smarts (one cognitive requirements)
Improvising (three cognitive requirements)
For example, one cognitive requirement related to predictability focused on developing daily schedules. The requirement necessitates that operators look across the network of sensors to predict future capabilities and effectively task sensors to an RSO over the next 24-hr period. This requires that operators anticipate possible observation timeslots based on orbital mechanics, weather, and anticipated RSO movements and maneuvers. To be successful, operators must understand the limitations of the network of sensors, including the status and availability of sensors not under their control, but necessary for observing an RSO of interest. Automation that supports the operator in accurately predicting and calculating the achievability of future taskings is critical to effective HMT.
Trust Calibration
Each of the ABI framework antecedents of trust were represented in our data. Many cognitive requirements were related to more than one of the ABI antecedents. Table 1 shows the frequency for each antecedent and the Task Assignment code.
Frequency of Antecedents and Task Assignment Codes.
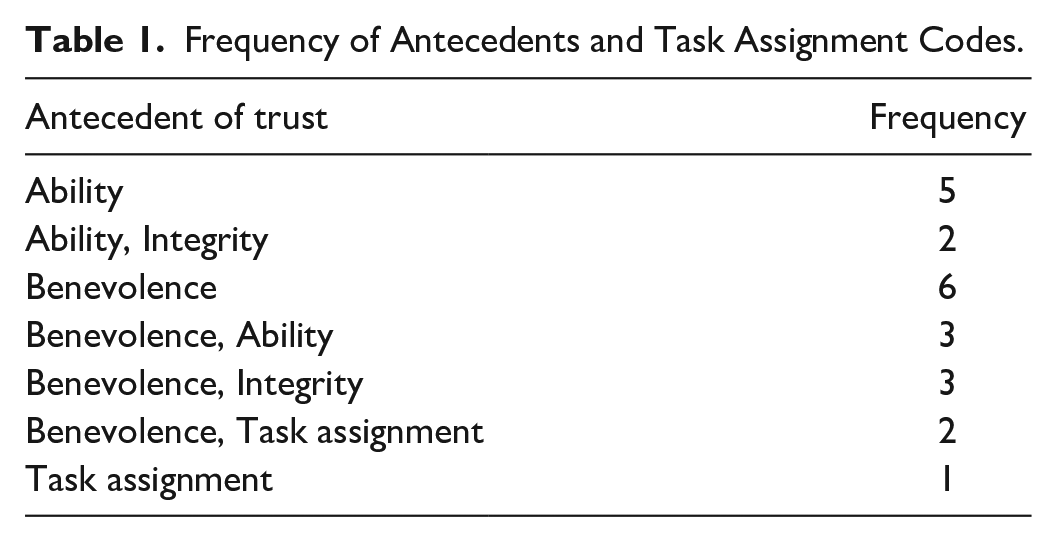
One example of a cognitive requirement classified as ability focuses on assessing the accuracy of image-detection software. This cognitive requirement highlights the importance of automation that notifies users of changes in accuracy as the software is applied to sensors with different capabilities. This represents a type of automation transparency that may help operators characterize the boundaries of the automation’s performance and calibrate their reliance.
User Interface Design Implications
Investigating the cognitive requirements associated with SDA revealed important user-interface design implications for the goal-directed C2 management tool as well as other SDA-related decision support technologies.
We identified four key design implications for a user interface that facilitates effective HMT. First, as advanced automation is implemented to support SDA, it will be critical to design features and capabilities that enable effective HMT and calibrated trust. A tool for dynamic scheduling may support operators in what-ifing and contingency planning to accommodate shifting needs and priorities. Second, current operations necessitate operator review of new observation data to identify anomalies. However, this is made more challenging due to noisy data and information transfer latencies. These requirements underscore the importance of designing an historical view interface that helps operators understand observations and anomalies in context. This may include information such as observations of known RSOs not where they’re expected, unknown RSOs, and missed observations. Third, SDA telescopes, radar, and other sensors are geographically dispersed around the world at strategic locations to capture a wider picture of outer space. The considerable distance between sensing sites requires considerable operator coordination to effectively plan, task, and execute RSO observations. The historical view interface coupled with a cross-site coordination tool will likely be important for understanding scheduling priorities at other sites, interpreting observations, and creating daily briefs for leadership. Fourth, given the increasing demand for sensor time, it will be critical for operators to understand historical performance of sensors, current network limitations, observation gaps, etc. to improve the resilience of daily schedules for planned observations. A long-term planning aid may support operators by indicating poor revisit rates or planned maintenance at other sensing sites that may have downstream effects on the schedule and/or inform future schedules based on network capabilities.
We also documented a scheduling visualization design concept described by operators, illustrating their vision for a support tool. These features include a scrollable timeline allowing users to look forward and backward in time, operator-created alerts to notify the human of important information such as missed observations, and a details window with additional information on RSOs of interest.
Discussion and Conclusions
One key takeaway from this work is the successful application of the HMT and trust literature to this rapidly evolving domain. Leveraging the HMT knowledge audit, we were able to evaluate the current state of collaboration between SDA operators and automation. By understanding these interactions, we generated design implications that highlight areas for improvement, cultural and ethical considerations, and opportunities for further integrating automation that better supports the human.
Furthermore, focusing on enablers and inhibitors of operator trust highlighted important features or characteristics that should be designed into the automation to facilitate effective and safe use. For operators, critical enablers of trust include features such as clear access to the information the software is using to inform its actions, visualizations that highlight the software’s rationale for a given suggestion, and mechanisms for understanding its strengths and limitations.
A second takeaway from this work is the value of Cognitive Task Analysis for future research and design in the space operations domain. Our team was able to understand current and future complexities of managing automation and conducting SDA. Identifying cognitive requirements and implications can support designers in prioritizing and designing elements of the automation that enable effective and efficient SDA while also augmenting the operator’s abilities.
Although the cognitive requirements and implications identified were derived from military users, we anticipate that they will also be relevant to commercial organizations conducting SDA. These findings may also inform development training that aids novices in managing the complexities of the work and provide greater support to augment an expert’s abilities.
An important limitation of the study is that we interviewed only eight operators in three roles. There are many other SDA-related roles that should be included in future analysis. Nevertheless, these findings highlight cognitive requirements that have not been previously documented. This foundational study has important implications for the design of effective HMT systems that support calibrated trust in SDA.
This information reviewed and cleared for public release by LeMay Center/PA on 18 Dec 23; Case number AETC-2023-1317
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: United States Space Force (GS00Q14ADU416).