
Abstract
Emergency vehicle lightings (EVL) mitigate the risk of collision and make drivers move over. The present paper explored how new alternative EVL designs can improve driver behavior in different emergency vehicle interaction scenarios. From workshops with 14 emergency responders, three scenarios (Emergency driving, Police pull-over, Emergency vehicle alongside the road) and 19 EVL blink patterns were chosen. These alternative EVLs were presented in an online survey with 2627 Swedish respondents. Alternative EVL affected reported driving behavior. Drivers reported being most certain of what is expected from them in the emergency-driving scenario. It is important to ensure that the EVL is easy to interpret in more unfamiliar emergency-vehicle interactions such as police pull-over. Only a third of drivers had seen the pull-over EVL currently used in Sweden. The current pull-over EVL in combination with a stop sign increased the chance of drivers reporting that they would pull over.
Introduction
During the period 2011 to 2020, over 400 law enforcement officers in the US died due to motor vehicle-related incidents (Centre for Disease Control and Prevention [CDC], 2022). To increase traffic safety and avoid collisions, other drivers must move over for emergency vehicles with flashing lights or sirens engaged. Previous studies have examined how emergency vehicle lighting (EVL) can be designed to promote visibility and traffic safety when an emergency vehicle is standing still alongside the road (Carrick & Washburn, 2012; Mayer et al., 2010; Terry et al., 2020). However, there is a lack of research examining other emergency vehicle interactions such as moving over for a driving emergency vehicle and police pull-over.
Contemporary LED technology and wireless control of lights allow flexibility in EVL design that has not been fully explored (Skinner et al., 2021). Variations of colors, blink frequency, and which lights to use are possible when designing modern EVLs. Previous research suggests that blue EVL is associated with the least discomfort glare, while red EVL might be more visible due to it contrasting with the blue sky (Cook et al., 2000). Even though visibility is crucial, cultural connotations associated with colors could affect interpretation and should therefore be considered. Blink patterns could also affect driver behavior. For instance, a quicker EVL blinking pattern could increase the perceived level of urgency (Turner et al., 2014).
The objective of the current paper was to explore how different EVL design patterns influence reported driving behaviors of civilian drivers in different emergency vehicle interaction scenarios. To explore the possible effects of alternative EVL, an online survey was distributed to Swedish drivers.
Methodology
Scenario Design
Four workshops and one interview were conducted with Swedish emergency responders (N = 14) to inform the design of use cases. The participants described difficulties with EVL situations and gave suggestions on how the current EVL could be improved. Based on the feedback from the emergency responders, three scenarios were selected: emergency driving, Police pulling over a vehicle (pull-over), and emergency service vehicle alongside the road.
The emergency responders suggested that a text sign could be added to the light bar, through which for example, police officers would be able to communicate with the civilian driver. When standing still alongside a road, emergency vehicles in Sweden have recently started using amber lights. The emergency respondents believed it may make drivers more reckless around emergency vehicles. Furthermore, the participants described that they often use high-beam flashing with the current blue EVL to make drivers notice the emergency vehicle earlier.
The three scenarios had six or seven EVL designs. The EVLs differed in blink patterns, colors, and frequencies (Table 1). The designs were implemented in a car-mounted EVL bar, and videos of the blink patterns in action were recorded on a closed test track. The recordings were made from the point of view of a civilian driver in a second car (Figures 1–3).
EVL Blink Patterns for Each Scenario.
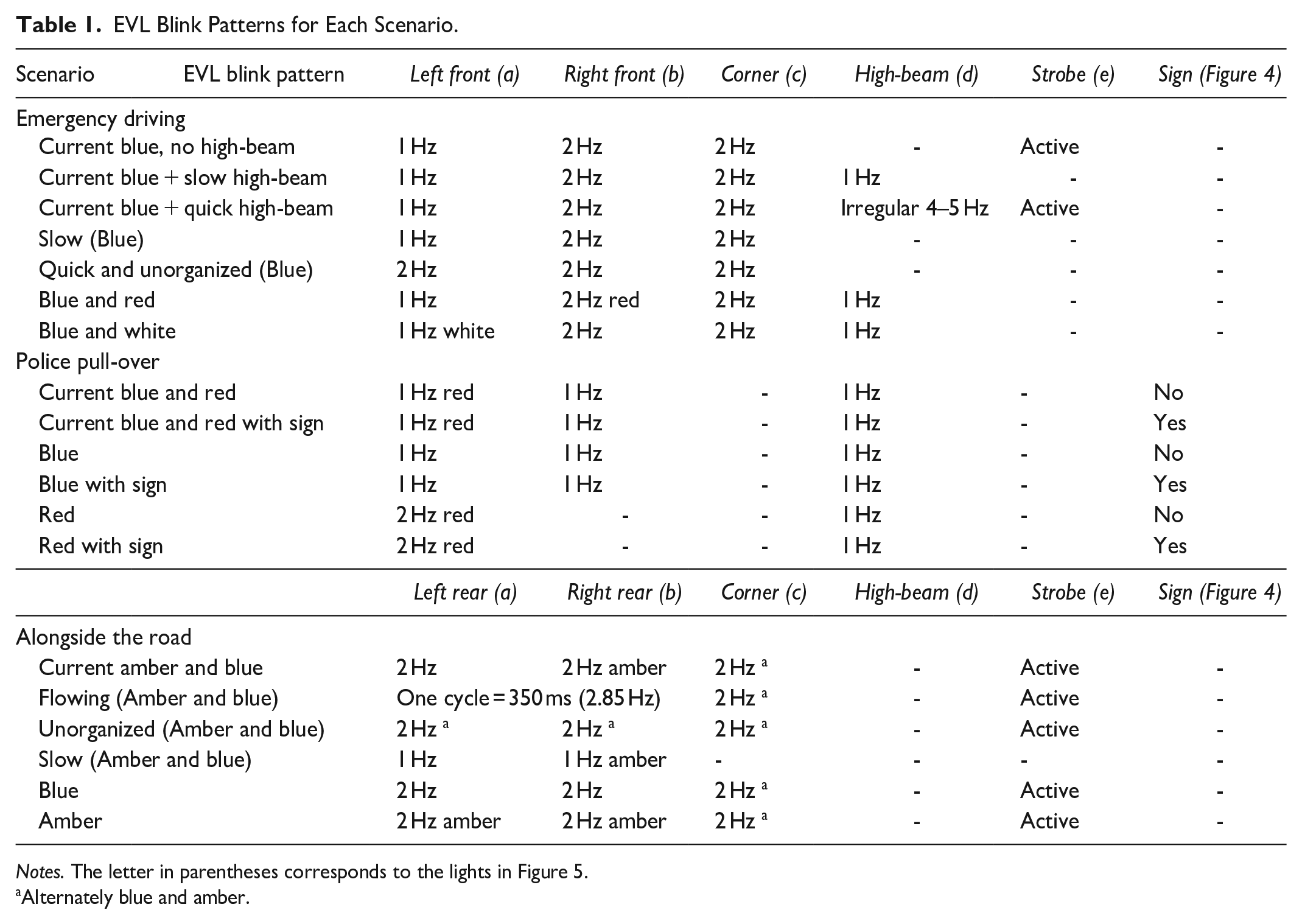
Notes. The letter in parentheses corresponds to the lights in Figure 5.
Alternately blue and amber.

EVL currently used for emergency driving.

EVL currently used for Police pull-over.

EVL currently used for emergency vehicle alongside road.

The stop sign added for the Police pull-over scenario.

The lights on a Swedish police vehicle. The letters correspond to the lights in Table 1.
Scenarios and Current EVL
Emergency Driving
An emergency vehicle approaches a civilian vehicle from behind. The civilian driver should move over to the right-most lane. Currently, a blue EVL is used Figure 1). The current EVL is sometimes accompanied by high-beam flashing.
Police Pull-Over
A police vehicle approaches a civilian vehicle from behind. The civilian driver should pull over and stop at a safe spot alongside the road. Currently, a combination of blue and red lights is used together with high-beam flashing (Figure 2).
Emergency Vehicle Alongside the Road
The emergency vehicle stands still by the side of the road. A civilian vehicle drives by. Currently, a combination of blue and amber lights is used (Figure 3).
Materials
Table 1 displays the technical specifications for each EVL. Left front, left rear, right front, right rear, and corners are part of the light bar. The light bar is blue if not stated otherwise. The high-beam flashing lights (White) are mounted on the grille. The strobe lights (Blue) are placed on the side rearview mirrors and under the headlights. The sign was added through post-editing and is displayed in Figure 4.
Participants
The videos were used in an online survey to test the effects of the different EVL designs. A sample of 2,627 Swedish respondents (80% men, 19% women, 1% chose not to answer), aged 20 to 94 (M = 49, SD = 10 years) completed the survey. All reported that they had a valid driver’s license. The survey was advertised on social media. The distribution of participants over the different EVL alternatives is presented in Table 1. Compared to the other EVLs, the current EVL was shown to more participants to ensure a proper baseline measure.
Procedure
Each participant saw a total of three videos. They saw each scenario once with one of the EVL blink patterns. After seeing one video, they responded to what they would do if they were the driver in the video. They could choose multiple actions. They could choose to: Use turn indicators, Activate hazard lights, Drive to the side of the road, Let go of the gas pedal, Brake, Stop, Accelerate, and Not change behavior.
The participants then rated statements on a scale of 1 to 10. They indicated how certain they were in their choice of action (1 = Very uncertain, 10 = Very certain), how dangerous the situation was (1 = Not dangerous, 10 = Very dangerous), how urgent it was to move over (1 = Not urgent, 10 = Very urgent), how visible the EVL was (1 = Not visible, 10 = Very visible), and if they had seen the EVL before (Yes, No, Unsure). The procedure was repeated for the two remaining scenarios. The order in which the videos were presented was randomized to mitigate primacy effects. After responding to the videos, the participants were asked to provide demographic information such as gender, age, and for how long they had had their driver’s license.
Data analysis was performed with odds ratio and ANOVA. To examine if alternative EVL designs would affect behavior, the reported actions for the alternative EVLs were compared to a baseline value (Actions reported with the current EVL). An odds ratio of 1.0 would indicate that the alternative EVL did not change the reported behavior, compared to the current EVL. An odds ratio below 1.0 would indicate a decreased likelihood of an action, while an odds ratio above 1.0 would indicate an increased likelihood of an action. Confidence intervals of 95% were used to determine statistical significance.
Independent one-way ANOVAs were performed to examine the effects on perceived certainty, danger, urgency, and visibility for each scenario. If the criteria for homogeneity were not met, Welch’s test was performed instead of the ANOVA. If the ANOVA or Welch’s test indicated statistical significance, planned contrasts comparing the current EVL with alternative EVL were performed. Data points three IQR from the mean were considered outliers and removed.
Results
Emergency Driving
The three most common actions were to drive to the side of the road (91.5%), use turn indicators (52.9%), and release the gas pedal (50.8%).
Compared to the current EVL, a quick and unorganized EVL decreased the likelihood of stopping (OR = 0.53, p < .05), while quick high-beam flashing increased the likelihood (OR = 1.66, p < .05). Quick high-beam flashing decreased the likelihood of releasing the gas pedal (OR = 0.72, p < .05). The EVL Blue and red decreased the likelihood of no change in behavior (OR = 0.27, p < .05). No significant differences from the baseline were observed for drive to the side of the road, use turn indicators and brake.
There were significant differences in the level of perceived certainty, F(6, 1158.75.75) = 4.97, p < .001, ηp2 = 0.009 (see Table 2). Drivers who had seen the quick and unorganized EVL were more certain that they had chosen the correct action compared to baseline, t(721.07) = 4.81, p < .001, d = 0.33. A significant difference in perceived urgency was observed, F(6, 1162.46.46) = 4.23, p < .001, ηp2 = 0.009. The planned contrasts did not show any significant difference between the current EVL and any alternative EVL. However, based on the findings in Turner et al. (2014), a planned contrast comparing the quick and slow EVL was performed. The results indicate that a quick and unorganized EVL was perceived as more urgent compared to a slow EVL, t(2620) = 2.90, p = .003, d = 0.21. Perceived visibility was affected by the EVL, F(6, 1158.51.51) = 17.07, p < .001, ηp2 = 0.036. Quick high-beam flashing was perceived as increasing visibility, compared to the current EVL, t(739.30) = 5.01, p < .001, d = 0.32. While a slow EVL decreased the visibility, t(709.95) = 4.27, p < .001, d = 0.34. No significant differences from baseline were seen in perceived danger, F(6, 2615) = 0.92, p = .48.
Mean Ratings of Certainty, Danger, Urgency, and Visibility For Each Scenario and EVL Blink Pattern.
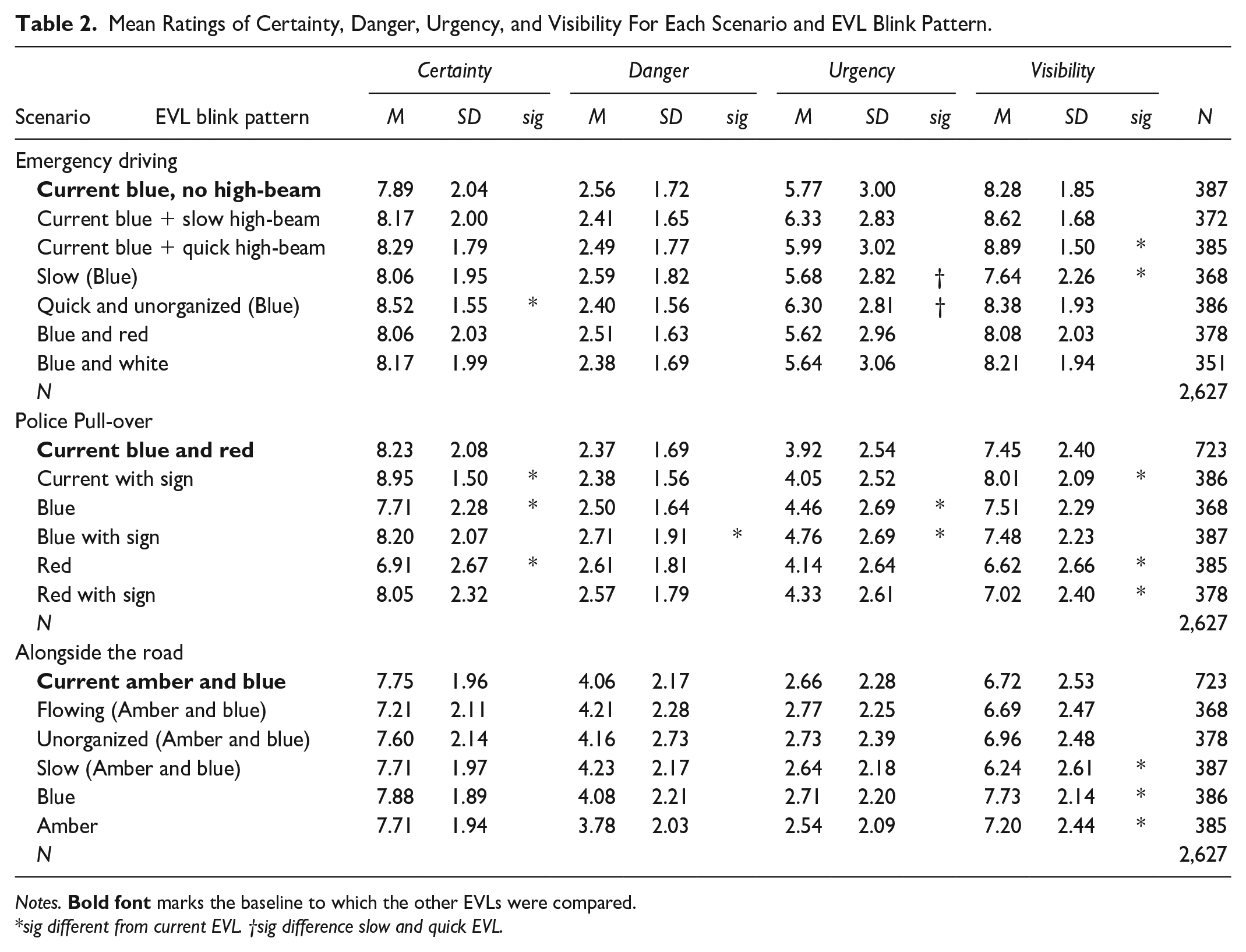
Notes.
sig different from current EVL. †sig difference slow and quick EVL.
A majority of drivers reported they had previously seen the current EVL, both with (65%) and without (66%) high-beam flashing.
Police Pull-Over
The three most common actions were to drive to the side of the road (83.1%), stop (70.4%), and use turn indicators (56.3%).
A blue EVL increases the probability of driving to the side of the road, compared to the current EVL (OR = 1.52, p < .05). However, blue decreased the likelihood of stopping compared to the current EVL (OR = 0.48, p < .05). Current with a sign increased likelihood of stopping with 2.02 compared to current EVL (p < .05). Current with sign also increased the odds of activating hazard lights (OR = 2.23, p < .05). The red EVL affected the odds of stopping (OR = 0.32, p < .05), use turn indicators (OR = 0.52, p < .05), braking (OR = 0.52, p < .05), and not changing driving behavior (OR = 5.12, p < .05) compared to the current EVL.
The reported level of certainty was affected by EVL, F(5, 1118.26.26) = 40.46, p < .001, ηp2 = 0.07 (Table 2). A planned contrast between current and current with sign indicated that the sign increased the level of certainty, t(996.02) = 6.60, p < .001, d = 0.33. Compared to the current EVL, the reported level of certainty was lower for blue, t(681.601) = 3.67, p < .001, d = 0.24 and red t(636.27) = 8.41, p < .001, d = 0.61. The perceived danger was affected by EVL design, F(5, 1116.56.56) = 2.63, p = .02, ηp2 = 0.005. Blue with sign increased perceived danger compared to current, t(704.24) = 2.97, p = .003, d = 0.14. There were significant differences in the level of perceived urgency, F(5, 2621) = 6.36, p < .001, ηp2 = 0.01. Compared to current EVL, Blue t(2621) = 3.22, p = .001, d = 0.21 and Blue with sign increased level of urgency t(2621) = 5.10, p < .001, d = 0.32. Perceived visibility was affected by the EVL, F(5, 1129.21.21) = 15.10, p < .001, ηp2 = 0.029. Compared to the current EVL, Current with sign was perceived as more visible t(886.68) = 4.01, p < .001, d = 0.24, while red, t(719.16) = 5.09, p < .001, d = 0.35 and red with sign was perceived as less visible t(749.96) = 2.75, p = .006, d = 0.18.
Only 34% reported having seen the current pull-over EVL used in Sweden. Some participants reported having seen EVL with a sign before, Current with sign (33%), blue with sign (29%) and red with sign (18%).
Emergency Vehicle Alongside the Road
The three most common actions were to release the gas pedal (73.1%), brake (62.5%), and use turn indicators (54.1%).
Compared to the current EVL, an amber EVL decreased the odds of braking (OR = 0.74, p < .05) and stopping (OR = 0.25, p < .05). A flowing EVL decreased the likelihood of braking (OR = 0.74, p < .05) and using turn indicators (OR = 0.94, p < .05).
No significant differences from baseline were seen in certainty, F(5, 1123.17.17) = 1.57, p = .16, and urgency, F(5, 2621) = 0.52, p = .76 (Table 2). There was a significant effect of EVL on perceived danger, F(5, 2621) = 2.23, p = .049, ηp2 = 0.01. However, the planned contrasts did not show any differences from the baseline. Perceived visibility was affected by the EVL, F(5, 1130.59.59) = 18.87, p < .001, ηp2 = 0.03. Compared to the current EVL, Blue t(906.11) = 7.09, p < .001, d = 0.41 and Amber, t(807.85) = 3.09, p = .002, d = 0.20) were perceived as more visible. A slow EVL was perceived as less visible, compared to the current EVL, t(768.266) = 2.91, p = .004, d = 0.19.
When asked if they had seen the EVLs before, 76% reported having seen the blue EVL. The current EVL had been seen by 58%.
Discussion
This study explored how different EVL design patterns influence the reported driving behaviors of civilian drivers in different emergency vehicle interaction scenarios. Previous studies have explored the effect of EVL when an emergency vehicle is standing alongside the road. However, no previous study has explored other scenarios for civilian and emergency vehicle interactions.
The findings of this study suggest that EVL designs affect reported driving behavior in emergency vehicle interactions. Out of the current EVLs, most drivers reported having seen the EVL currently used in emergency driving. It is therefore important to make sure that the EVL is easy to interpret in other, more unfamiliar emergency-vehicle interactions, such as Police pull-overs, where only 34% reported having seen the EVL currently used in Sweden.
In the workshop, it was suggested that high-beam flashing effectively catches the attention of civilian drivers. The results of the survey indicate that a quick high-beam flashing increases visibility and the likelihood of drivers stopping.
Similar to the findings in Turner et al. (2014), a quicker flash pattern was associated with increased perceived urgency. In addition, in the current study, it increased the participants’ level of certainty that they had chosen the correct action. However, an increase in certainty does not necessarily mean that the drivers chose the objectively best action.
Adding a text sign to the car-mounted light bar was suggested in the workshop. In the pull-over scenario, drivers reported that they would be more likely to stop and activate hazard lights if they were approached by a police vehicle with a stop sign. This suggests that a stop sign would have positive effects on driver behavior in a police pull-over scenario and should be investigated further.
The emergency respondents in the workshop expressed a fear that the use of amber EVLs would increase reckless driving around emergency vehicles. The results from the survey indicate that an amber EVL decreases the odds of braking and stopping, which might mean that drivers would drive with less caution around emergency vehicles with amber EVL. Furthermore, amber and blue-flowing EVL decreased the likelihood of braking and using turn indicators. It might be that the flowing EVL is not associated with emergency vehicles and therefore braking is not required. It may also be that the flowing light resembles an arrow pointing in the direction of the adjacent lane which, instead of braking, invites drivers to move to the lane in which the light is flowing toward.
The current study only considered reported, and not naturalistic behavior. Future studies should examine EVL’s effect on driver behavior in a naturalistic traffic situation. Another limitation of this study is that only visual warnings were considered. Emergency vehicles often use sirens to warn surrounding road users. Future studies should explore siren design to support drivers in emergency vehicle interactions.
Conclusions
This study shows that different EVL designs affect self-reported driver behavior. It is therefore important to consider not only what EVL would be perceptually optimal, but also how the design will affect driver behavior.
Drivers were most familiar with what was expected from them in the scenario where an emergency vehicle was approaching them and they were expected to move over, compared to police pull-over and driving past an emergency vehicle standing still alongside the road. Only 34% of the drivers had seen the pull-over EVL currently used in Sweden. To support drivers in emergency vehicle interactions, the EVL must be easy to interpret. Particularly, in unfamiliar emergency vehicle scenarios.
Footnotes
Acknowledgements
The authors would like to thank Standby, especially Pär Vikingsson for his assistance with the EVL recordings.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was financially supported by the Swedish National Road and Transport Research Institute.